Embed Size (px)
Citation preview
Магістерська робота на тему: «Дослідження та розробка
системи автоматизації технологічної підготовки води для
зрошувальних машин»Підготував студент
2 курсу магістратуриГрицанюк Р.Я.
Об’єкт, предмет, мета магістерської роботи
• Об’єктом магістерської роботи є процеси водопідготовки для зрошувальних машин.
• Предметом є система автоматичного керування водо підготовкою для зрошувальних машин.
• Мета роботи полягає у зменшенні витрат енергії на технологічну водопідготовку шляхом розробки системи автоматичного керування водопідготовкою.
Основними показниками якості води є:
• вміст агресивних газів (СО2 і О2)• прозорість води (вміст зважених речовин,
які видаляються легко при фільтруванні)• твердість води (вміст у воді солей кальцію і
магнію)
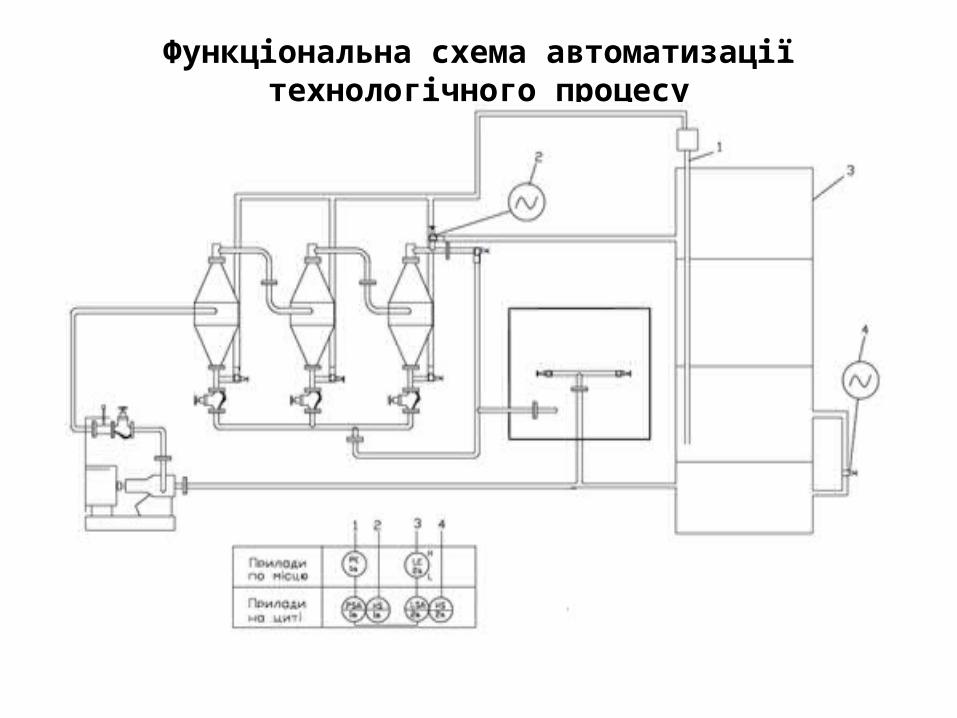
Функціональна схема автоматизації технологічного процесу
Катіонний фільтр
• це металічний резервуар циліндричної форми, всередині якого міститься сульфовугілль. Висота шару сульфовугілля залежить від твердості вхідної води; при більшій твердості шар вище. У нижній частині фільтра під шаром сульфовугілля розташовується дренажний пристрій, що складається з колектора і системи труб, приєднаних до нього. До верхньої частини цих труб приварені патрубки з різьбленням для нагвинчування спеціальних щілинних дренажних ковпачків, виготовлених із пластмаси. Ці ковпачки на своїх гранях мають вузькі щілини, ширина яких менша найменшого зерна сульфовугілля, що запобігає виносу матеріалу з водою під час його роботи і регенерації.
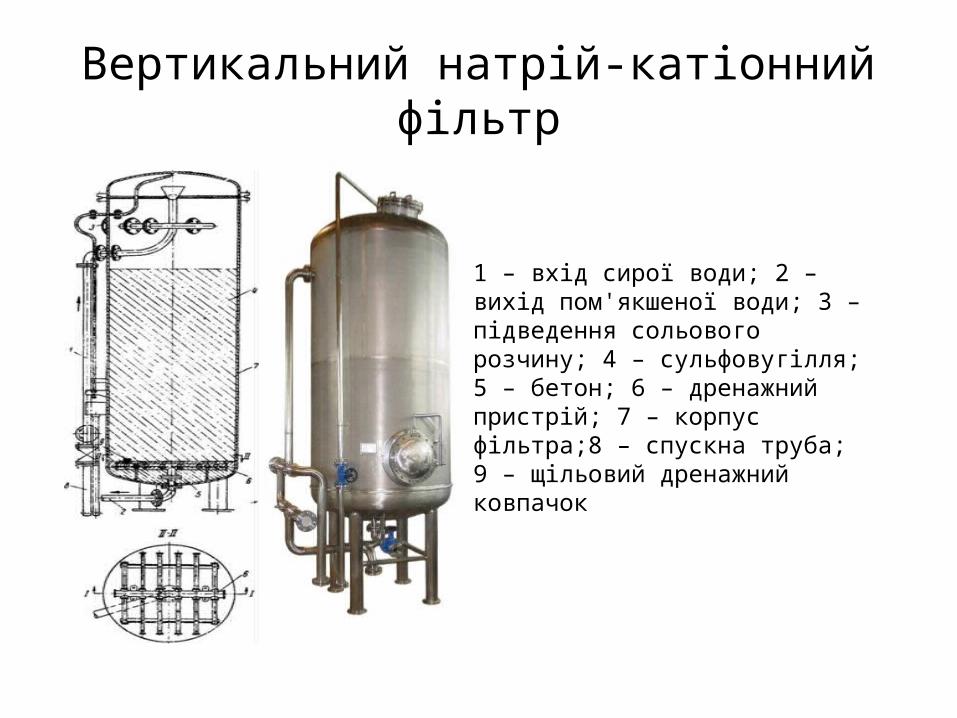
Вертикальний натрій-катіонний фільтр
1 – вхід сирої води; 2 – вихід пом'якшеної води; 3 – підведення сольового розчину; 4 – сульфовугілля; 5 – бетон; 6 – дренажний пристрій; 7 – корпус фільтра;8 – спускна труба; 9 – щільовий дренажний ковпачок
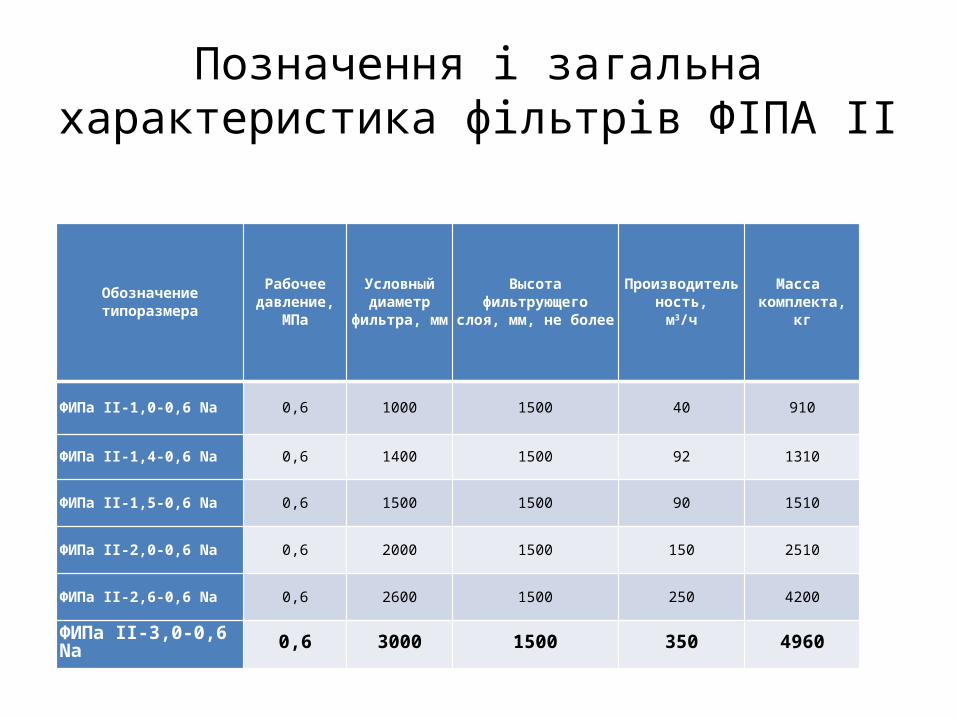
Позначення і загальна характеристика фільтрів ФІПА ІІ
Обозначениетипоразмера
Рабочеедавление,
МПа
Условныйдиаметр
фильтра, мм
Высота фильтрующегослоя, мм, не более
Производительность,м3/ч
Масса комплекта,
кг
ФИПа II-1,0-0,6 Na 0,6 1000 1500 40 910
ФИПа II-1,4-0,6 Na 0,6 1400 1500 92 1310
ФИПа II-1,5-0,6 Na 0,6 1500 1500 90 1510
ФИПа II-2,0-0,6 Na 0,6 2000 1500 150 2510
ФИПа II-2,6-0,6 Na 0,6 2600 1500 250 4200
ФИПа II-3,0-0,6 Na 0,6 3000 1500 350 4960
Регенерація фільтрів
•Іонообмінні фільтри водопідготовчих установок являють собою
апарати періодичної дії. На протязі робочого періоду іонітного фільтра
виснажується обмінна ємність завантаженого у фільтр матеріалу.
Відновлення обмінної ємності досягається пропуском через них
регенераційного розчину з наступним відмиванням фільтра, крім того,
проводиться попереднє розпушення шару іоніту. Автоматичні
прилади хімічного контролю якості води повинні бути досить
надійними і мати достатню точність, тому відключення іонітних
фільтрів на регенерацію здійснюється автоматично, за непрямими
показниками (наприклад, по кількості обробленої води або за часом)
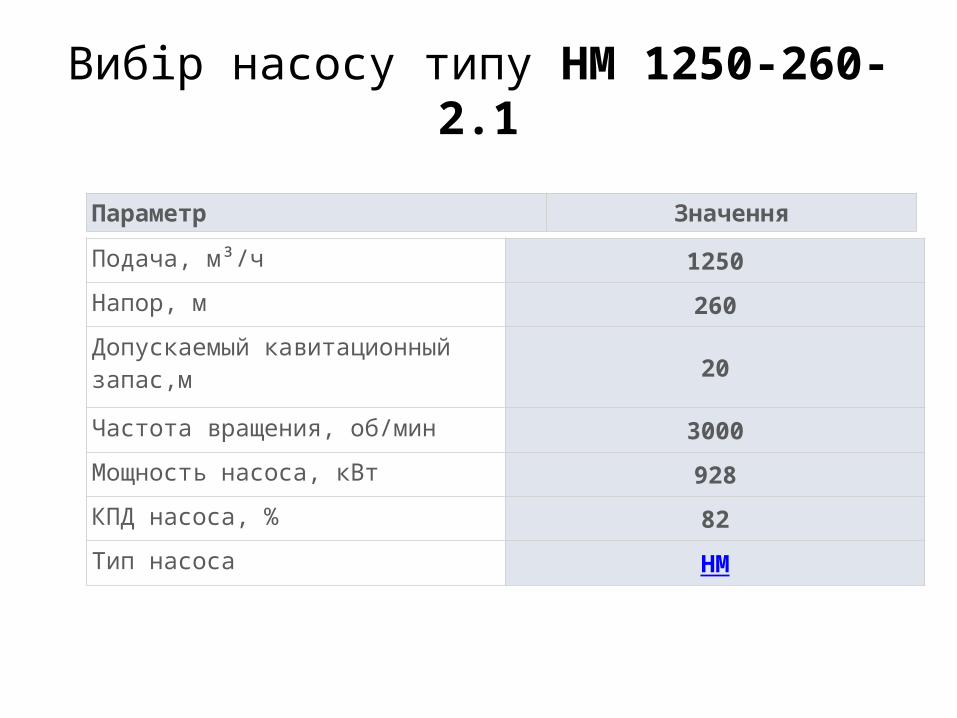
Вибір насосу типу НМ 1250-260-2.1
Параметр Значення
Подача, м³/ч 1250Напор, м 260Допускаемый кавитационный запас,м
20
Частота вращения, об/мин 3000Мощность насоса, кВт 928КПД насоса, % 82Тип насоса НМ
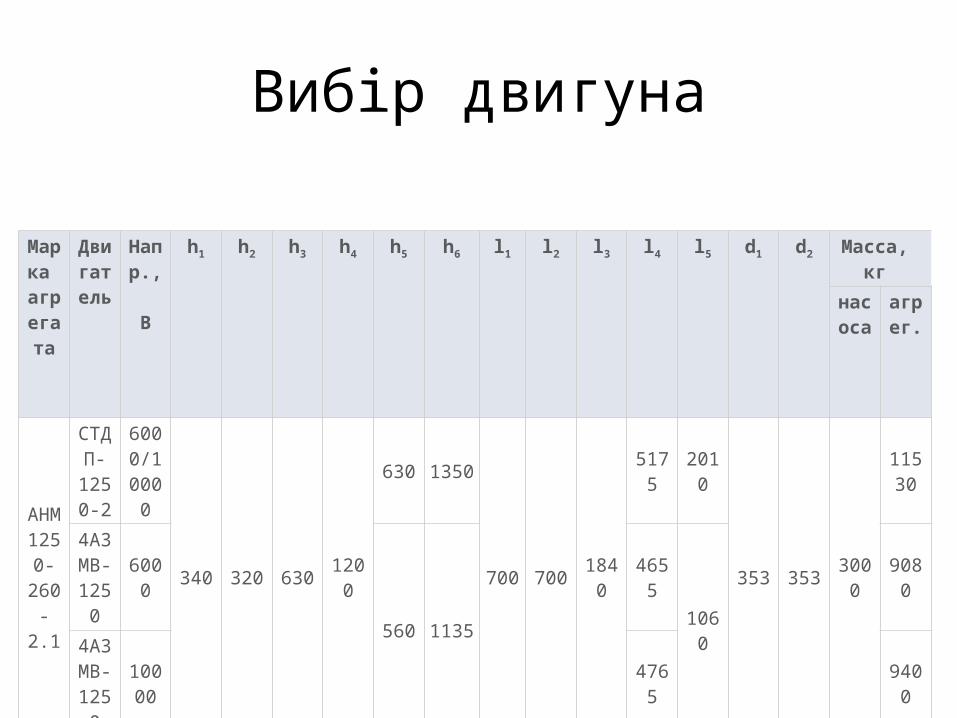
Вибір двигуна
Марка
агрегата
Двигател
ь
Напр., В
h1 h2 h3 h4 h5 h6 l1 l2 l3 l4 l5 d1 d2 Масса, кг
насоса
агрег.
АНМ 1250-260-2.1
СТДП-
1250-2
6000/10000
340 320 630 1200
630 1350
700 700 1840
5175 2010
353 353 3000
11530
4А3МВ-1250
6000
560 1135
4655
1060
9080
4А3МВ-1250
10000 4765 9400
Станція управління насосом Sauger SS
Станція призначена для автоматичного і ручного управління трифазним насосним агрегатом з прямим пуском електродвигуна.Станції застосовуються для роботи з двигунами потужність від 0,55 до 55 кВт.
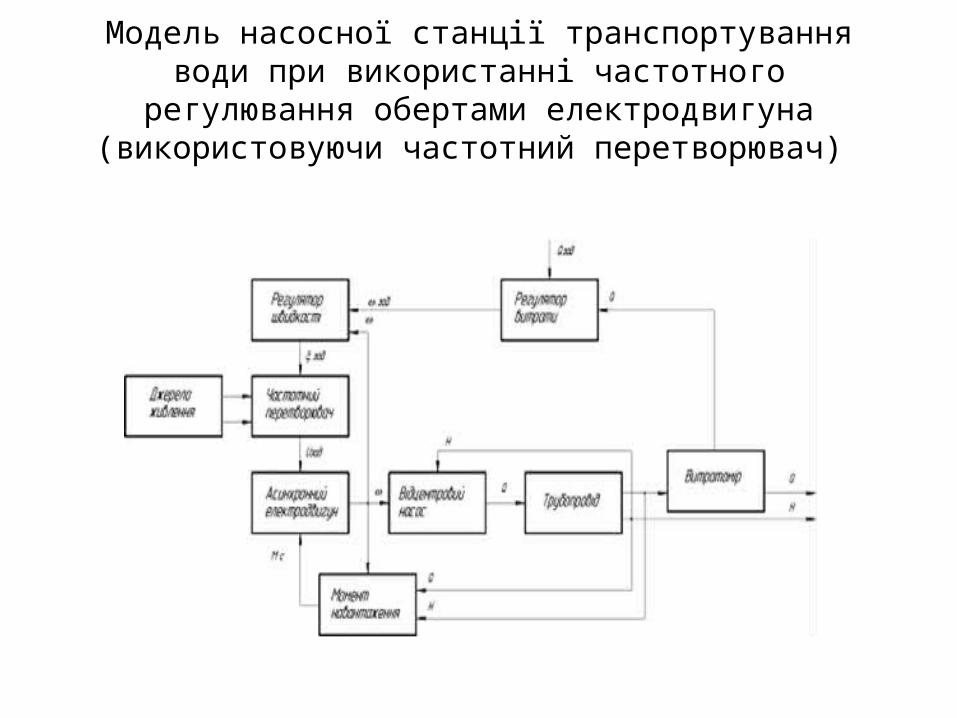
Модель насосної станції транспортування води при використанні частотного регулювання обертами
електродвигуна (використовуючи частотний перетворювач)
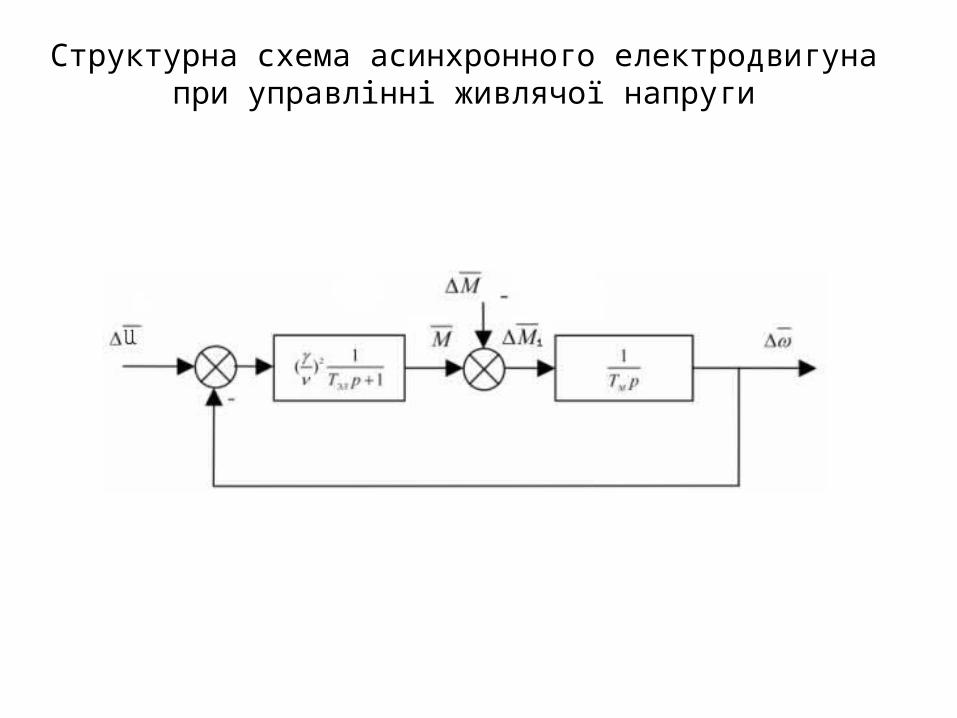
Структурна схема асинхронного електродвигуна при управлінні живлячої напруги
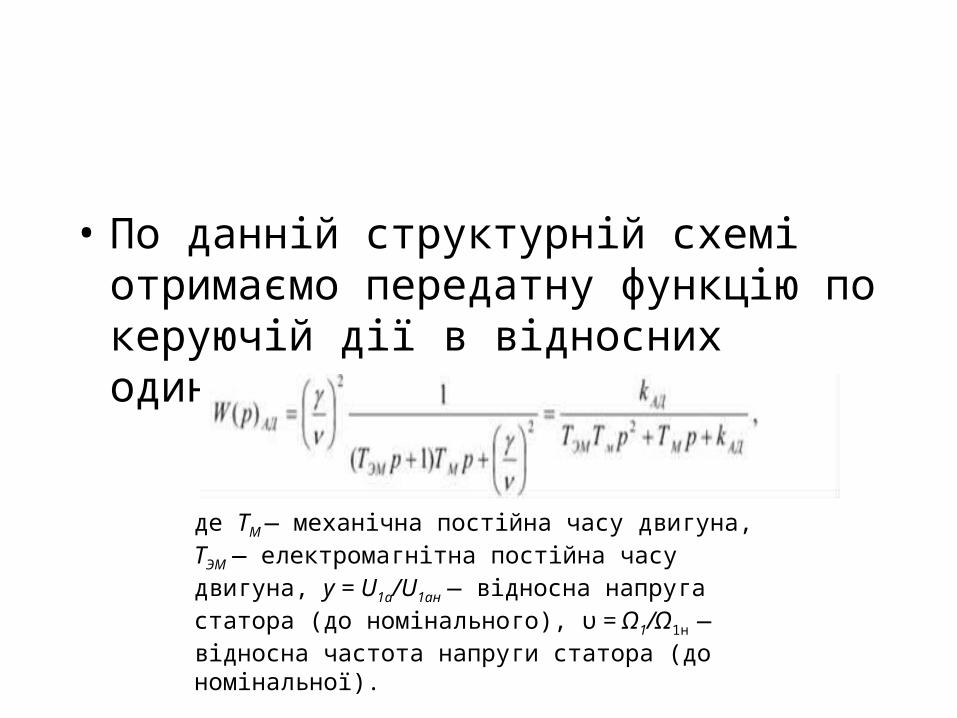
• По данній структурній схемі отримаємо передатну функцію по керуючій дії в відносних одиницях
де ТМ — механічна постійна часу двигуна, ТЭМ — електромагнітна постійна часу двигуна, у = U1a/U1aн — відносна напруга статора (до номінального), υ = Ω1/Ω1н — відносна частота напруги статора (до номінальної).
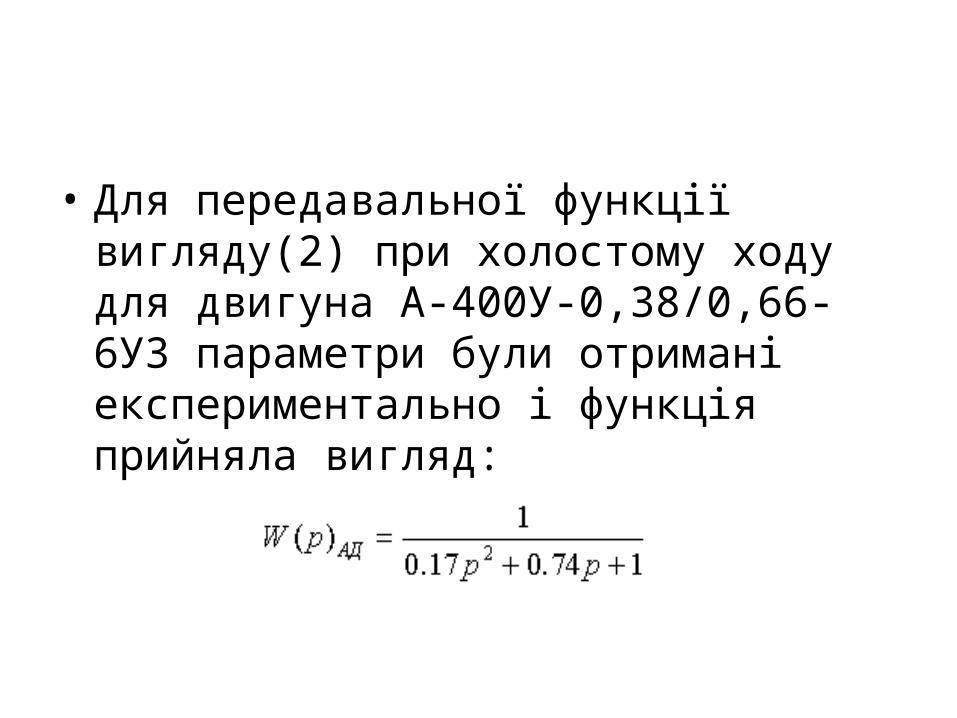
• Для передавальної функції вигляду(2) при холостому ходу для двигуна А-400У-0,38/0,66-6У3 параметри були отримані експериментально і функція прийняла вигляд:
Виконуючи перетворення попередньої формули, зворотні перетворенням у виразі отримуємо:
• Механічна характеристика насосного агрегату на робочій ділянці може бути описана рівнянням
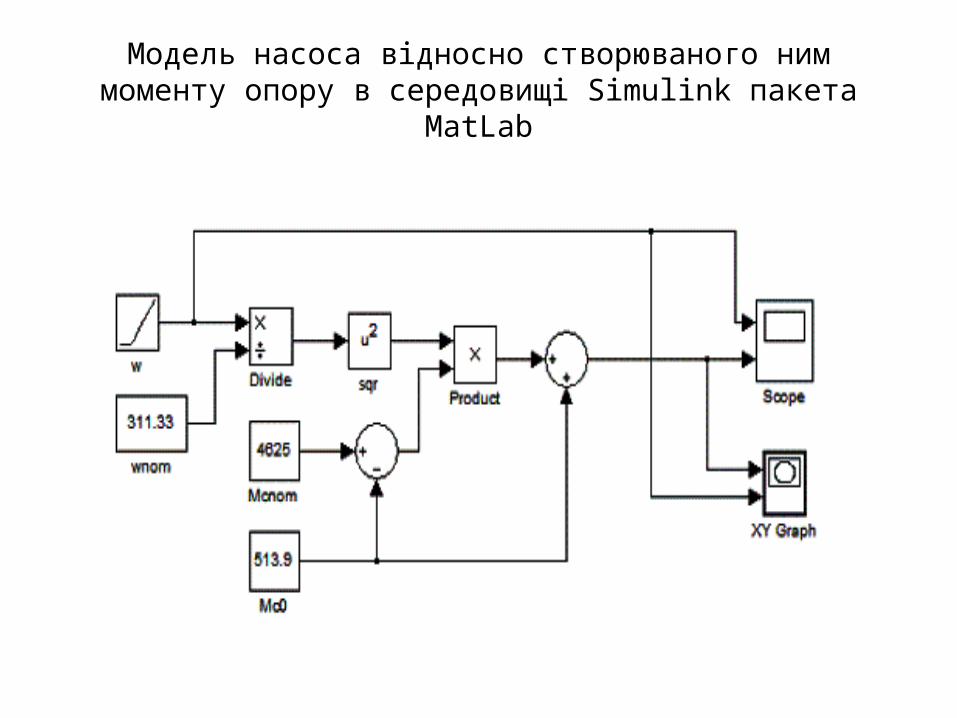
Модель насоса відносно створюваного ним моменту опору в середовищі Simulink пакета MatLab
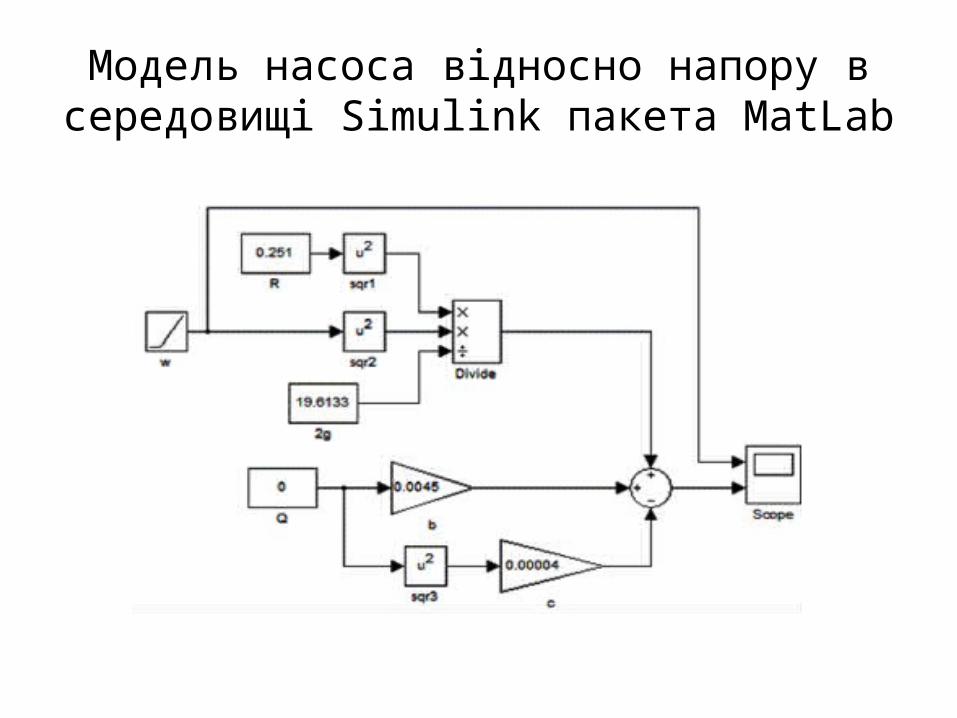
Модель насоса відносно напору в середовищі Simulink пакета MatLab
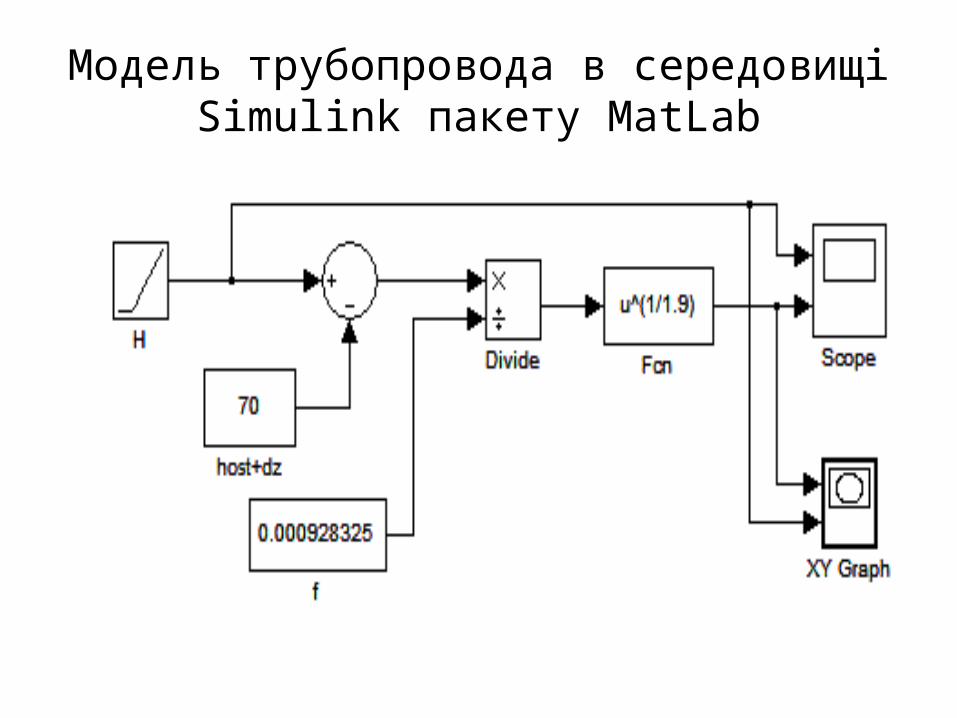
Модель трубопровода в середовищі Simulink пакету MatLab

Структурна схема гасника гідравлічних ударів
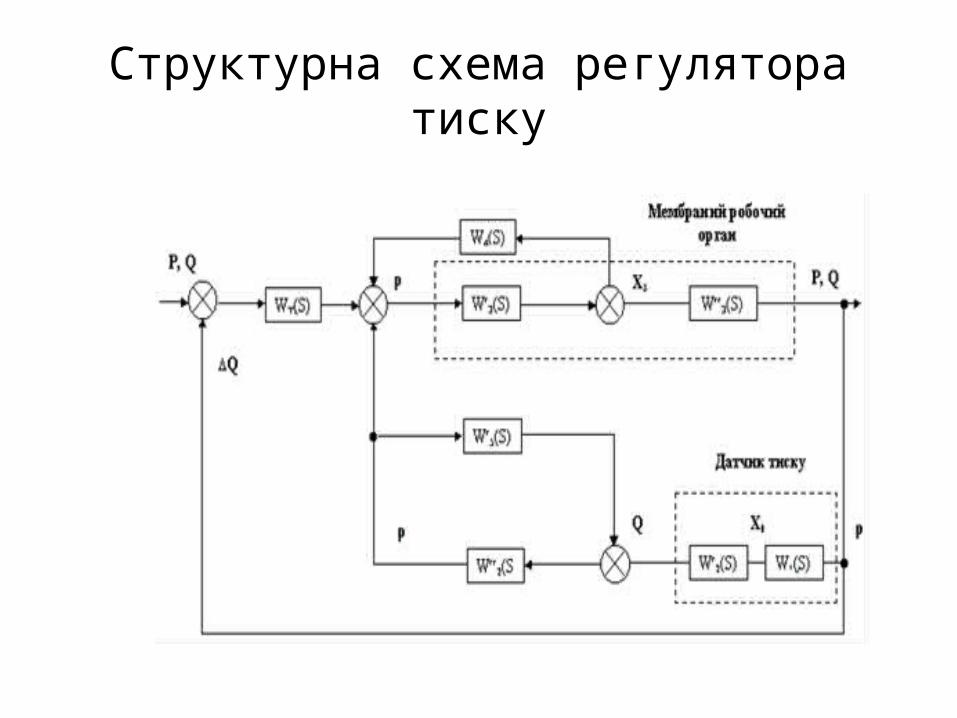
Структурна схема регулятора тиску
• Вихідні дані по двум попереднім схемам були прийняті згідно із попередніми експериментальними дослідженнями. Особливість статистичного експерименту полягала у тім, що маса робочого клапану та коефіцієнт в’язкого тертя взяті оптимальними для регулятора РДУ-200 та КВ-100 . Відповідно: m = 1 кг; b = 1,5103 Н/м/с.
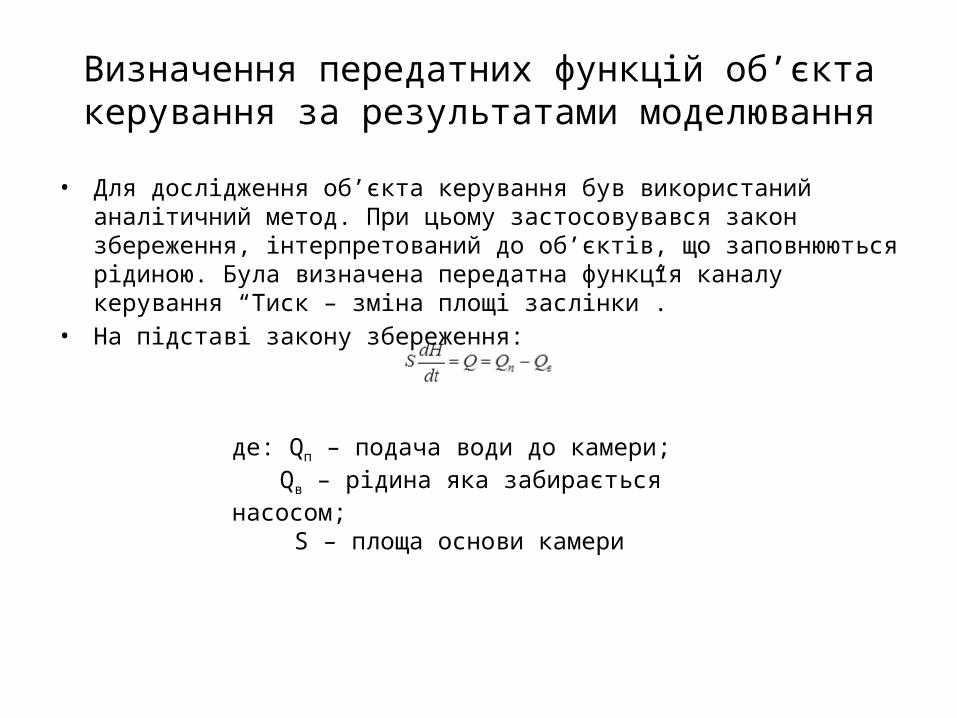
Визначення передатних функцій об’єкта керування за результатами моделювання
• Для дослідження об’єкта керування був використаний аналітичний метод. При цьому застосовувався закон збереження, інтерпретований до об’єктів, що заповнюються рідиною. Була визначена передатна функція каналу керування “Тиск – зміна площі заслінки”.
• На підставі закону збереження:
де: Qп – подача води до камери;Qв – рідина яка забирається
насосом; S – площа основи камери
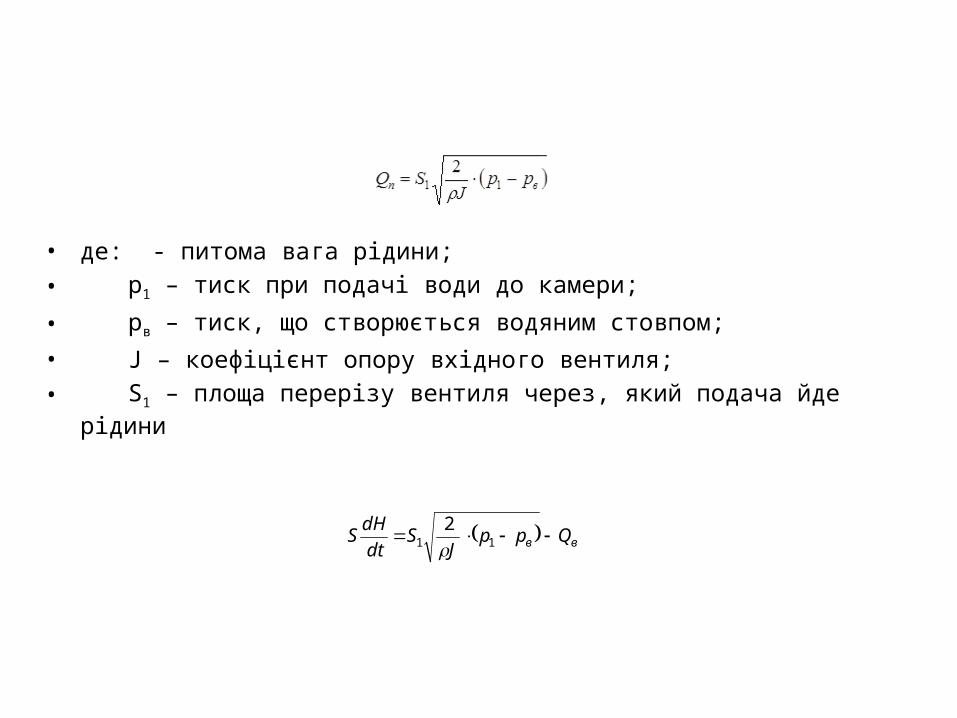
• де: - питома вага рідини;• р1 – тиск при подачі води до камери;
• рв – тиск, що створюється водяним стовпом;• J – коефіцієнт опору вхідного вентиля;• S1 – площа перерізу вентиля через, який подача йде рідини
вв QppJ
SdtdHS 11
2
1 12
вd HS S p pdt J
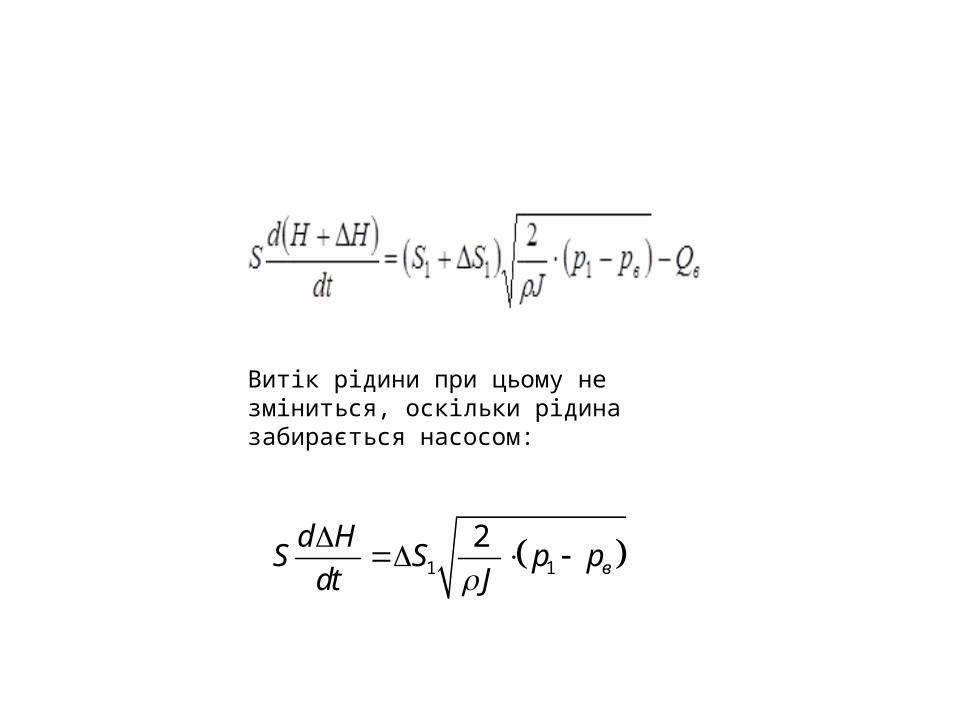
Витік рідини при цьому не зміниться, оскільки рідина забирається насосом:
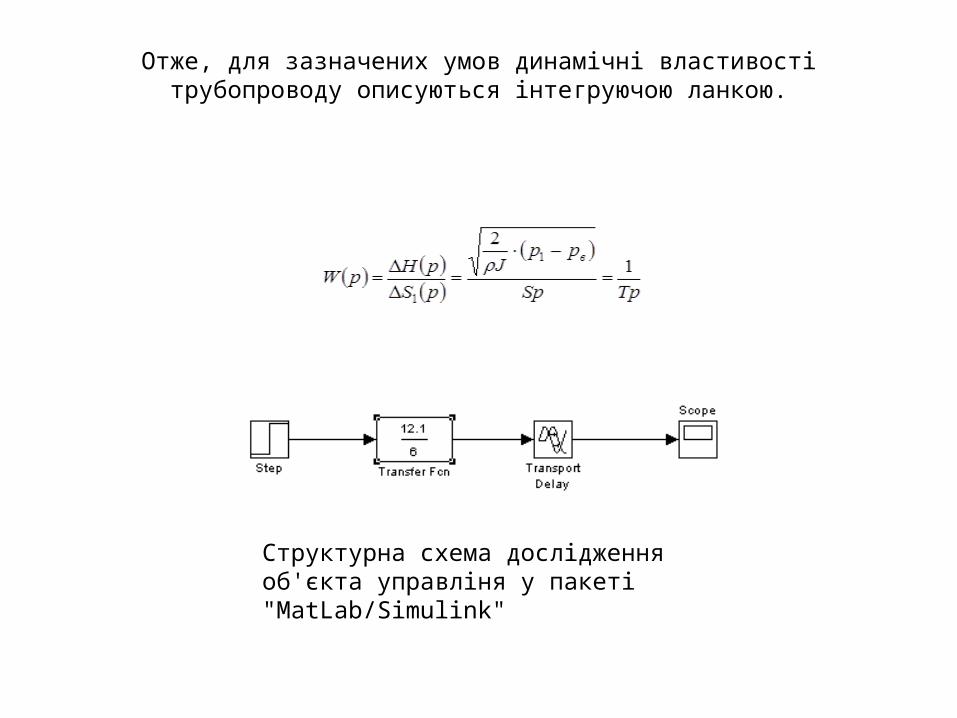
Отже, для зазначених умов динамічні властивості трубопроводу описуються інтегруючою ланкою.
Структурна схема дослідження об'єкта управліня у пакеті "MatLab/Simulink"
Вибір алгоритму керування• Динамічні властивості об'єктів керування дають змогу
визначити на стадії проектування алгоритм управління. Для цього проаналізуємо співвідношення між сталою часу та часом запізнення об'єкта керування:
• 2/Т1 – то рекомендується лінійний алгоритм керування;• якщо /Т1 – імпульсний алгоритм керування;• якщо /Т0,2 – позиційний алгоритм керування• При визначенні слід пам'ятати, що структура передаточної
функції має відповідати структурі, описаній у виразі.• Оскільки для нашого об'єкту:• Отже, алгоритм його управління, доцільно вибрати –
позиційний.
Вибір мікроконтролера• При виборі керуючого елемента зупинились на мікроконтролері
фірми MICROCHIP РІС16С72. Це пов’язане з тим, що мікроконтролер відноситься до дешевих, високоефективних, 8-розрядних мікропроцесорів із вбудованим аналого-цифровим перетворювачем. Всі мікроконтролери РІС16/17 використовують RISC структуру процесорного ядра. мають розширені можливості, восьмирівневий стек та багато зовнішніх та внутрішніх переривань.
• Гарвардська архітектура з окремими шинами команд і даних дозволяє одночасно передавати 14 розрядні команди і 8 розрядні дані.
• Двохкомандний конвеєр забезпечує виконання всіх команд за один машинний цикл, окрім команд розгалуження програми.