Embed Size (px)
Citation preview

信 息 部/ BIM STUIDO
计算机辅助建筑设计 ——BIM/数字建造/编程&脚本主讲人: 马海东 BIM研究室总工程师 ETHZ MAS CAAD

信 息 部/ BIM STUIDO
CAD历史及发展趋势
CAAD 简介及案例BIM信息技术——从蓝图到实时动态数据库
数字建造( Fab lab)
生成技术(编程&脚本)——emergence
大数据+社区

信 息 部/ BIM STUIDO
CAD历史及发展趋势
CAAD 简介及案例BIM信息技术——从蓝图到数据库
数字建造( Fab lab)
生成技术(编程&脚本)——emergence
大数据+社区

50年代 60年代 70年代 80年代 90年代 21世纪
1
2
3
4
信 息 部/ BIM STUIDO
1.第一台计算机 ENLAC(埃尼阿克)
2.第一台CAD计算机 SKETCHPAD
3.第一批CAD商用软件 20世纪70年
4.基于特征设计的cad软件及IGS规范出现
1
2
3
4

信 息 部/ BIM STUIDO
第一台计算机 ENLAC(埃尼阿克)

50年代 60年代 70年代 80年代 90年代 21世纪
1
2
3
4
信 息 部/ BIM STUIDO
第一台计算机 ENLAC(埃尼阿克)
时间: 1946年速度:每秒可进行5000次加减运算电子技术:18800个电子管尺寸:占地170平方米重量:重达30吨功率:140千瓦价格:140万美元
功能:尽管这台机器只有少数专家才会使用,但它把过去借助台式计算器需7~20小时才能计算出一条发射弹道的工作量缩短到只用30秒,使科学家们从奴隶般的计算中解放出来。

信 息 部/ BIM STUIDO
第一台CAD计算机 SKETCHPAD
50年代 60年代 70年代 80年代 90年代 21世纪
1
2
3
4

信 息 部/ BIM STUIDO
时间:1962年地点:MIT 林肯(Lincoln)实验室发明者:Ivan. E. Suthenland著作:博士论文《SKETCHPAD——人机通信的图形系统》
贡献1:首次系统地论述聊交互式图形学的相关问题他还提出了功能键操作、“交互设计技术”、“分层存储符号的数据结构”等新概念和新技术,为 CAD技术的发展和应用打下了理论基础。
第一台CAD计算机 SKETCHPAD
50年代 60年代 70年代 80年代 90年代 21世纪
1
2
3
4

信 息 部/ BIM STUIDO
第一批CAD商用软件 20世纪70年代
软 件 开发及支持公司UGS 美国麦道(MD)公司开发I-DEAS 美国国家航空及宇航局(NASA)支
持CALMA 美国通用电气(GE)公司开发
50年代 60年代 70年代 80年代 90年代 21世纪
1
2
3
4

信 息 部/ BIM STUIDO
1982年,美国Autodesk公司推出基于PC平台的Auto-CAD二维绘图软件。当时的Autodesk公司是一个仅有员工数人的小公司,其开发的CAD系统虽然功能有限,但因其可免费拷贝,故在社会得以广泛应用。

信 息 部/ BIM STUIDO
基于特征设计的cad软件及IGS规范出现
时间 1985年之后事件:基于特征设计商业软件开始出现示商业软件:CATIA,UG-Ⅱ,I-DEAS,Pro/ENGINEER,ACIS应用:机械、航空航天、汽车、造船等
50年代 60年代 70年代 80年代 90年代 21世纪
1
2
3
4

信 息 部/ BIM STUIDO
1980年制定了数据交换规范IGES(1nitial Graphics Ex-change Specifications)。这一规范后来被认可为美国ANSI标准。IGES规定了统一的中性文件格式,不同的CAD、CAM系统可通过此中性文件进行数据交换,形成一个完整的CAD/CAM系统

信 息 部/ BIM STUIDO
目前智能化,网络化,集成化是所有商业化软件追求的目标。而有创新性的突破性的的技术还没有明朗。
当前cad发展趋势
50年代 60年代 70年代 80年代 90年代 21世纪
1
2
3
4

信 息 部/ BIM STUIDO
CAD历史及发展趋势
CAAD 简介及案例BIM信息技术——从蓝图到数据库
数字建造( Fab lab)
生成技术(编程&脚本)——emergence
大数据+社区

信 息 部/ BIM STUIDO
BIM信息技术——从蓝图到数据库
数字建造( Fab lab)
生成技术(编程&脚本)——emergence
大数据+社区

信 息 部/ BIM STUIDO
CAD历史及发展趋势
CAAD 简介及案例
数字建造( Fab lab)
生成技术(编程&脚本)——emergence
BIM信息技术——从蓝图到数据库
大数据+社区

信 息 部/ BIM STUIDO
CAAD= CAD+3DMAX+PHOTOSHOP
BIM信息技术——从蓝图到数据库
武汉琴台大剧院投标方案

信 息 部/ BIM STUIDO
BIM信息技术——从蓝图到数据库
功能强大的计算机的问世,使建筑师,以产生新的建筑物和其他结构的令人惊叹的图像。没有一个大项目的设计是不通过真实感渲染。最终的设计如何,甚至通过虚拟现实。

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO
令人惊奇的是,这些奇特图形往往是仅用于概念阶段,在初步设计与施工图阶段,甚至建设阶段几乎没有发挥作用。在大多数情况下,施工图仍然是以老式的两维图纸展开,手工或使用计算机辅助设计(CAD)软件。

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO
存在的问题即使它是由计算机生成的2 - D图纸, 但是这些图纸只是一些线的组合。没有内在的数据结构来告诉你,这条线是墙,楼梯或窗口。如果要更改一个窗口位置,你要来重建它周围的墙。

信 息 部/ BIM STUIDO
绘制图纸传统上占一大块建筑师的费用,使得修改变成了一个昂贵而耗时的业务。

信 息 部/ BIM STUIDO
建成后的效果(广东珠江设计院)

50年代 60年代 70年代 80年代 90年代 21世纪
1
2
3
4
4.基于特征设计的cad软件及IGS规范出现
信 息 部/ BIM STUIDO
BIM信息技术——从蓝图到数据库
借鉴CAD技术在飞机和汽车行业的发展在设计过程中采用精致的数字模型

信 息 部/ BIM STUIDO
自20世纪70年代第一代BIM系统就已经开始开发。首次实施BIM概念的是Graphisoft公司的Archi-CAD——

信 息 部/ BIM STUIDO
它是从传统CAD的飞跃,一台计算机模拟的不是计算尺与绘图笔,只能通过人来理解图纸。BIM模型是基于对象,这些对象有自己的几何形状同时还包括这些对象之间的关系的信息。这样,当一个对象改变,任何与之相关对象会自动更新。然后可以从模型生成的3 - D的视图和传统的2 - D图纸。

信 息 部/ BIM STUIDO
Graphisoft的“虚拟建筑”及Benltey System的“综合项目模型”还有Autodesk然后提供的“建筑信息模型”都是差不多的一个概念,通过数字3维模型进行信息的交流与互操作。

信 息 部/ BIM STUIDO
© 1995-2004 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.
2003年05月22日
© 1995-2004 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO
BIM信息技术——从蓝图到数据库
现在基于特征设计的cad软件已经成功的被应用到建筑上

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO
有两个因素促成了这种转变。

信 息 部/ BIM STUIDO
因素一:现有的BIM商业软件的可用性——直到最近这一商业现实才成立。

信 息 部/ BIM STUIDO
CATIA,一家法国公司开发的产品设计工具

信 息 部/ BIM STUIDO
盖瑞先生与2002年创立了一家数字公司开发出基于CATIA的BIM软件(digitalproject)。

信 息 部/ BIM STUIDO
古根海姆博物馆 盖里设计

信 息 部/ BIM STUIDO
同一年CAD软件的领先制造商,欧特克购买了一个较小的所谓REVIT软件,它有同样的BIM功能,而微软在底层框架上的支持,使之商业化成为可能。

信 息 部/ BIM STUIDO
第二个因素是一直存在的建造业对成本的关注

信 息 部/ BIM STUIDO
现实的情况:招投标阶段,成本估算往往过于乐观。一旦施工开始造价成倍增加也都可能。

信 息 部/ BIM STUIDO
从历史上看,信息是昂贵的,而原材料和能源价格便宜。
因此想在设计时知道所需的每一个设计元素的确切属性是不切实际的。 在设计过程中,设计师经常从最坏的情况考虑, 增加冗余,导致资源成本的增加。

信 息 部/ BIM STUIDO
现在的趋势:信息成本不断下降(借助BIM技术)。同时原材料和能源的成本正在不断的上升。
最终会达到一个转折点,造成每个元素的确切属性可以精确的被计算,然后根据这些属性信息,构件可以准确的使用机

信 息 部/ BIM STUIDO
BIM对建筑的几个影响

信 息 部/ BIM STUIDO
3D信息模型
使用BIM技术,可以识别在设计过程中的碰撞错误。使用的2D图形很难发现不一致。因此即使是有经验的建筑师和工程师也会赶上这样的错误。而当这些错误变的明显的时候,施工可能已经开始,这就造成了成本的浪费。这种浪费大概相当于施工预算的2%,甚至高达5%。

信 息 部/ BIM STUIDO
地点:济南业主:济南西客站片区指挥部功能:歌剧厅结构体系:框架主要材料:钢筋混凝土、钢材、玻璃 设计方:北京建筑设计研究院三所辅助设计方: 北京市建筑设计研究院bim研究室复杂形体小组辅助设计人员:陈友文、陈冲、马海东辅助设计内容: 建筑造型优化辅助设计周期: 30日软件:Catia、Rhino、Grasshoper
03济 南 省 会 文 化 中 心 - 歌 剧 厅
地点:济南业主:济南西客站片区指挥部功能:歌剧厅结构体系:框架主要材料:钢筋混凝土、钢材、玻璃 设计方:北京建筑设计研究院三所辅助设计方: 北京市建筑设计研究院bim研究室复杂形体小组辅助设计人员:陈友文、陈冲、马海东辅助设计内容: 建筑造型优化辅助设计周期: 30日软件:Catia、Rhino、Grasshoper
03济 南 省 会 文 化 中 心 - 歌 剧 厅
3D信息模型 案例

信 息 部/ BIM STUIDO
图1:济南文化中心-歌剧厅设计效果图 三所

信 息 部/ BIM STUIDO
图2:BIM工作室模型效果图
3D信息模型 案例

信 息 部/ BIM STUIDO
歌剧厅/Project Brief:
常见问题/FAQ :
特殊问题/Special Problems:
歌剧厅是济南文化中心项目中的一个子项目,本项目主要是对
吊顶面和扶手面的优化以及设备的定位。其中吊顶面的优化是项目
的关键点。
a.文件夹组织
b.Product
c.命名规则
d.图纸制作
e.空间曲线定位
i.UDF库
a.2.2m碰撞
见复杂形体BIM导则①
①

信 息 部/ BIM STUIDO
楼座与楼座之间的碰头问题是这个项目中比较突出问题,楼座之间较小的空间导致每一个踏步都对应着一个吊顶平面,这样就给我们在检测碰头问题时带来了不便。在这里我们先从每一个踏步上引出来一个2.2米高的面,再通过碰撞检测检查出哪些面与吊顶平面之间有相交,再用测量工具测出检测面到相应吊顶平面之间的距离,这样就能为设计师提供准确的信息,方便及时修改和优化。
01.1 2.2m面
01.2 碰撞检测
a 2.2m碰撞

信 息 部/ BIM STUIDO
2.2米高面
3D空间标注
01.3 标注尺寸
01.4 优化后效果

信 息 部/ BIM STUIDO
碰撞规则
计算机计算结果
参与碰撞的几何物体

信 息 部/ BIM STUIDO
报错机制,红色为错误(突破规则)
计算机准确报表
01.5 碰撞报表

信 息 部/ BIM STUIDO
BIM还可以显著提高的建筑师和工程师之间的沟通和协调。
数据无缝链接

信 息 部/ BIM STUIDO
随着BIM的介入,3D模型将成为主要参考依据

信 息 部/ BIM STUIDO
B e i j i n g A r t C e n t e r
地点:北京功能:文化综合体结构体系:框架主要材料:钢筋混凝土、钢材、玻璃 设计方:北京建筑设计研究院工程所辅助设计方: 北京市建筑设计研究院bim研究室复杂形体小组辅助设计人员:陈友文、马海东辅助设计内容: 建筑造型优化、幕墙有理化、外壳施工图辅助设计周期: 6个月软件:Catia、Rhino、VS C#
北 京 文 化 中 心
01B e i j i n g A r t C e n t e r
地点:北京功能:文化综合体结构体系:框架主要材料:钢筋混凝土、钢材、玻璃 设计方:北京建筑设计研究院工程所辅助设计方: 北京市建筑设计研究院bim研究室复杂形体小组辅助设计人员:陈友文、马海东辅助设计内容: 建筑造型优化、幕墙有理化、外壳施工图辅助设计周期: 6个月软件:Catia、Rhino、VS C#
北 京 文 化 中 心
01数据无缝链接 案例

信 息 部/ BIM STUIDO
图1:北京文化中心效果图 提供者 工程所 图2:北京文化中心效果图 提供者 工程所

信 息 部/ BIM STUIDO
图3:BIM工作室建筑模型

信 息 部/ BIM STUIDO
图4:BIM工作室建筑模型

信 息 部/ BIM STUIDO
02.2 空间控制线优化 02.3 空间控制线
02.4 分割幕墙面 02.5 幕墙面和空间控制线

信 息 部/ BIM STUIDO
从3D模型产生二维的图纸用于加工定位。

信 息 部/ BIM STUIDO
原有的建筑的设计方案是基于插图与rhino等软件发展出来的,因此存在大量的NURBS曲线, 这类曲线不利于在施工中人工准确定位(基于现有的中国国内的施工条件与施工优势)。因此对原有的参照线进行优化及简化定位是有利于后期的施工的。
2D定位标注图
b 2D&3D参照系统定位
PD
Fcreated
with
pdfFactory Pro trialversion
ww
w.pdffactory.com
PD
Fcreated
with
pdfFactory Pro trialversion
ww
w.pdffactory.com
NURBS----->欧拉几何系统

信 息 部/ BIM STUIDO
该模型也使得它可以计算出所需要的材料,因此建筑成本的数量。一旦已经创建了一个大厦的计算机模型,它可以提取特定子系统的详细资料,如空调,水和电线。

信 息 部/ BIM STUIDO
这里的控制线可以分成两部
分: 一是平面控制线、二是空间控
制线;平面控制线是个部分幕墙
在XY平面上的投影,反过来只要
说各幕墙都是由XY平面上的曲线
拉伸而成,所以只要通过优化XY
平面上的投影线即平面控制线就
能达到优化幕墙面的效果。
空间控制线是个幕墙的边界
线,它是附着在有平面控制线拉
伸出来的幕墙曲面上的,通过这
些边界线的界定就能得到完整的
幕墙,由于它是附着在幕墙面上
的,所以只要通过调整曲线上控
制点的Z坐标就能优化空间曲线
了。
有平面控制线与空间控制线
相结合就能得到完成的幕墙控制
面。
a 控制线优化
02.1 控制点Excel输出

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO
建筑的数据模型不再只是一座大厦的3D信息,而是一定意义上的数字样板或模拟版本。
在航空业,飞机的首次飞行,可能需要在电脑里采用流体动力学软件计算机翼的气流,现在的模拟测试的想法同样可以用于建筑业。
数字模拟

信 息 部/ BIM STUIDO
数字模拟 案例
S h a o x i n g n a t a t o r i u m
地点:绍兴功能:游泳馆结构体系:框架主要材料:钢筋混凝土、钢材、玻璃 设计方:北京建筑设计研究院七所辅助设计方: 北京市建筑设计研究院bim研究室复杂形体小组辅助设计人员:陈友文、陈冲、马海东辅助设计内容: 建筑造型优化辅助设计周期: 3个月
绍 兴 游 泳 馆
05S h a o x i n g n a t a t o r i u m
地点:绍兴功能:游泳馆结构体系:框架主要材料:钢筋混凝土、钢材、玻璃 设计方:北京建筑设计研究院七所辅助设计方: 北京市建筑设计研究院bim研究室复杂形体小组辅助设计人员:陈友文、陈冲、马海东辅助设计内容: 建筑造型优化辅助设计周期: 3个月
绍 兴 游 泳 馆
05

信 息 部/ BIM STUIDO
图1:绍兴游泳馆设计效果图 7AS1

信 息 部/ BIM STUIDO
图2:BIM工作室游泳馆屋顶面优化效果图

信 息 部/ BIM STUIDO
游泳馆屋顶面测试的主要因素是屋面在雨天是否会出现存水问题,即设计的屋面的最低点必须保证在曲面的边缘,这样才可以使水流沿着边缘留下。 图中分别是我们用等高线测试的屋面的高度分布和软件生成的曲面的曲率分析(红色到蓝色曲率逐渐变小)。 在得到合适的曲面之前,屋顶面的最低点并不在曲面的边缘,我们通过测量得出最低点 , 并 提 高 最 低 点 位置,重新生成曲面,经过多次测试调整使曲面的最低点位置在面的边缘上,而且曲面的设计原则保持不变,只影响面的最低点,最终生成合适的曲面。
01.1 屋面等高线示意图
a 坡度优化

信 息 部/ BIM STUIDO
01.2 坡度优化示意图
针对游泳馆屋顶面可能存水的问题,画等高线分析是常见的方法,此外我们还进行了动态流体模拟分析。 流体软件Re-alflow能够真实的模拟水流动方向,软件中带有一系列的力场系统,包括重力、风力等等。在 场 景 中 设 置 重力,水流就会受重力影响沿着屋顶面向下(重力方向)流动,经测试水流从屋顶面的两个低点位置流下,说明屋面在下雨的情况下不会存积水。
1
3
5
7
2
4
6
8
b 动态流体模拟
02.1 Realflow软件模拟流程图

信 息 部/ BIM STUIDO
c 屋顶划分
在这个设计中要求将屋顶用特定矩形平面来拟合,由于屋顶面是双曲面,矩形平面在拟合过程中可能会有一个点游离在曲面以外,所以在做好面后还将游离点到曲面的距离测量了出来以便更好的确认方案的可行性。
03.1 编写拟合曲面的程序
03.2 拟合后的完成效果

信 息 部/ BIM STUIDO
03.3 游离点到曲面的距离

信 息 部/ BIM STUIDO
BIM的实用性超出设计和施工。该模型还可以帮助建筑的维修和管理,精简显示管道运行
维修和管理

信 息 部/ BIM STUIDO
BIM软件可以影响建筑师的设计,更加准确的说是辅助设计。使他们更加自由地进行试验、微调、调整设计。
这些变化可能会导致更好的有想象力的建筑。
参数化设计

信 息 部/ BIM STUIDO
Shaoxing gymnasium
地点:绍兴功能:体育馆结构体系:框架主要材料:钢筋混凝土、钢材、玻璃 设计方:北京建筑设计研究院7A4、7S3建筑面积:38390M2
辅助设计方: 北京市建筑设计研究院bim研究室复杂形体小组辅助设计人员:陈友文、陈冲、马海东辅助设计内容: 建筑造型优化辅助设计周期: 3个月
绍 兴 体 育 馆
04Shaoxing gymnasium
地点:绍兴功能:体育馆结构体系:框架主要材料:钢筋混凝土、钢材、玻璃 设计方:北京建筑设计研究院7A4、7S3建筑面积:38390M2
辅助设计方: 北京市建筑设计研究院bim研究室复杂形体小组辅助设计人员:陈友文、陈冲、马海东辅助设计内容: 建筑造型优化辅助设计周期: 3个月
绍 兴 体 育 馆
04
参数化设计 案例

信 息 部/ BIM STUIDO
图1:绍兴体育馆设计效果图 7AS1

信 息 部/ BIM STUIDO
图2:BIM工作室建筑模型效果图

信 息 部/ BIM STUIDO
图3:BIM工作室建筑模型分层效果图

信 息 部/ BIM STUIDO
这个项目中设计师的意图有几点:1、空间线在XY平面上的投影尽量是椭圆;2、空间线离幕墙龙骨不能太远,且要均匀
些。这几点不是硬性要求但是要做到会比较困难,一下是这次空间曲线的优化方法:
1、 由参考的曲面看膜以椭圆长轴两边分界一边高一边底,高的一边在XY平面上的投影可以离X轴近点,这样就可以将其优
化成一条由两部分组成的曲线:长轴相等,短轴不一样的两个半个椭圆,再经一定的偏移得到空间曲线在平面上的投影;
2、 在ZX平面上的投影也是分为两部分,及以ZX平面为界,每边形成一条投影线,通过优化这条投影线,并拉伸成一个曲
面;
3、 将XY上的投影线投影到这两个空间曲面上的道两条空间曲线
4、 将两条空间曲线均分得到曲线上的均分点
5、 将这些均分点连接起来得到闭合的空间曲线。
这样通过优化XY面上的曲线和ZX平面上的曲线就可以优化空间曲线了。
a 空间曲线的优化
01.1 膜结构参照线

信 息 部/ BIM STUIDO
01.2 优化后的平面投影线 01.3 拉伸后的空间曲面
01.4 优化完成膜结构控制线

信 息 部/ BIM STUIDO
这是一个随机分面的幕墙划分,设计师将幕墙面的材质设为全透玻璃、半透玻璃、铝板三种,并要求在不同的区间内按不同的比例划分,并且要符合开窗比。在这里我们首先将整个幕墙分为三个区间,每个区间内的各种材质的比例不一样;其次选取第一个区间内的所有面,并将插件(BIM研究室复杂形体小组开发)打开,设置好比例启动插件,这样程序将自动将随机划分的面添加到不同的list中;然后我们可以选中list中的元素设置他们的材质或颜色来加以区分;最后一次将其余的区间区分好。这样幕墙的划分就完成了。
b 幕墙划分
02.1 随机分面一
02.2 设置材质

信 息 部/ BIM STUIDO
02.3 随机分面二
02.4 分面效果图

信 息 部/ BIM STUIDO
在这个项目中的幕墙是一个相似于椭球体的曲面形态,是一个不可展开的面,但是当幕墙面细分后,边成了由一个一个的四边形面组成的曲面后,每一个四边形确是能展开的面,所以只要将一个一个的四边形面按照顺序展开在同一平面上就能得到整个幕墙的展开面了,下面是展开面完成的过程:1、 由于这个项目中的幕墙是四分之一对称的,所以只要展开四分之一就可以的到其他的;2、 幕墙是以轴线之间均分的,同一列中的四边形面可以整体的看成是一个可展开的曲面,所以先将同一列中的四边形面合并成新的曲面;3、 在将要展开的平面上做出展开参考点;4、 将2中生成的曲面依次展开到展开平面上,选好展开相关点和相关轴;5、 对称出幕墙中以短轴对称的另外四分之一的展开面6、 生成展开图并做出轴线,添加开洞。
03.1 展开幕墙
03.2 幕墙展开1/4面
03.3 幕墙展开1/2面
c 展开面图

信 息 部/ BIM STUIDO
03.4 幕墙面展开图纸

信 息 部/ BIM STUIDO
基于现有的施工条件,将大面分割成几个小面方便施工单位的施工,在这个项目中我们遇到的是需要将一个四边形面分成数个四边形小面。在这里我们采用的是UDF,首先将四边形面均分或者是按要求划分为若干份并设置好UDF初始条件,便于协同建筑师多次调整。
04.1 需要细分的屋顶面
04.2 插入UDF
d 细分四边形面

信 息 部/ BIM STUIDO
04.3 细分结果一
04.4 细分结果二
04.5 添加材质的屋顶效果

信 息 部/ BIM STUIDO
“在不久的将来——没有图纸”

信 息 部/ BIM STUIDO
CAD历史及发展趋势
CAAD 简介及案例
数字建造( Fab lab)
生成技术(编程&脚本)——emergence
BIM信息技术——从蓝图到数据库
大数据+社区

信 息 部/ BIM STUIDO
数字建造( Fab lab)

信 息 部/ BIM STUIDO
fab lab 是一个小规模的工作间。它能为个人提供数字化制造的功能。

信 息 部/ BIM STUIDO
硬件

信 息 部/ BIM STUIDO
一般fab lab配备了一系列灵活的计算机控制工具,涵盖了不同的尺度和各种材料,使得“几乎所有的东西”都有可能被制造出来。

信 息 部/ BIM STUIDO
切割机

信 息 部/ BIM STUIDO
数控设施

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO
软件

信 息 部/ BIM STUIDO
脚本语言
脚本语言通常都有简单、易学、易用的特性,目的就是希望能让程序员快速完成程式的编写工作。

信 息 部/ BIM STUIDO
虽然fab lab没有广泛分布在大规模生产中,但是已经表现出它的潜力,使得小团队进行原型开发变为可能。

信 息 部/ BIM STUIDO
PIKE LOOP
Gramazio & KohlerNew York2009. 09. 30
数字建造( Fab lab) 案例

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO
22M长的砖结构

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO
SUBDIVIDED COL-UMNS
Michael Hansmeyer Gwangju Design Biennale 2011
数字建造( Fab lab) 案例

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO
通过processing编程语言利用细分曲面的算法生成截面

信 息 部/ BIM STUIDO
生成CNC切割机所需要的DXF文件

信 息 部/ BIM STUIDO
数字建造( Fab lab) 案例
ETH MAS Final Project——数字化流程

信 息 部/ BIM STUIDO
159
areas of higher deformationand round section
Initial organic shapes achieved using the UF concept:
Thanks This work is based on our Master of Advanced Studies final thesis at the ETH Zurich in 2009/2010.
We thank Ludger Hovestadt who made this project possible.
We would like to thank some persons from the Chair for their advice: Oskar Zieta, Philipp Dohmen, Steffen Lemmerzahl, Michael Hansmeyer & Manuel Kretzer
Thanks also to our MAS collegues for their support and friendship. Special thanks goes to Dieter Schmitter for his friendly help during the long welding sessions.
Also thanks to our extern testing advisor Ueli Zihlmann

信 息 部/ BIM STUIDO
参数化流程利用现有的rhino, catia, excel 我们设计了我们自己的参数化数据链。

信 息 部/ BIM STUIDO
140
Step 3:Record each coordinate of points and export it in excel .
After generating geometry data, designers have to do further detail based on it. Considering about the property of material and physcial condition of real world, it may need to adjust the design data again. Thus, record all the position data for developing and analyzing is indispensable.
Export model information to excel
Building skin
Facade components
Triangular frame
Record each point in excel Use point information for preliminary analysis
Fig.3 flow chart
The digital chain is based on initially predefined, basic design data. The following diagram explains the main process.
Building grid
CAD in RhinoScript
preliminary geometry analysis
data transfer
Step 3:Record each coordinate of points and export it in excel .
After generating geometry data, designers have to do further detail based on it. Considering about the property of material and physcial condition of real world, it may need to adjust the design data again. Thus, record all the position data for developing and analyzing is indispensable.
Export model information to excel
Building skin
Facade components
Triangular frame
Record each point in excel Use point information for preliminary analysis
Fig.3 flow chart
Digital chainConsidering the frame is one facade frame of many frames in a facade, the aim was to automate this process and to create a digital production chain. So every frame data next could be created automatically. First a standard, architectural design tool was used and the facade scripted in Rhino. In the next steps the main design driving data was transferred to CATIA V5. Here further attributes were added, parametrized and transferred to the relevant machines. Finally a custom made application used coordinates and generated a welding script for the KUKA robot and FRONIUS welding station.
Building skin
Facade components Triangular frame containing basicgeometry driving data

信 息 部/ BIM STUIDO
141
Geometry driging data in excel 1 column per frame
Adaptive source module TYPE A- Lasercutting
CAM in Catia V5geometry alert
Simulation & coordinates welding
1. WELDING
2. LASER CUTTING
3. CONSTRUCTION DOCUMENTS
excel file stores geometry coordinates: 1 column/triangle,24 triangles = 24 columns
Construction details & data sheet

信 息 部/ BIM STUIDO
142
cut sheet metal
facade companyto construct/provide components
Generating KRC language; GUI
1. WELDING
2. LASER CUTTING
3. CONSTRUCTION DOCUMENTS

信 息 部/ BIM STUIDO
数控流程—— 我们开发了自己的脚本软件。从catia5导出的excel表中自动生成焊接的KUKA机器人脚本。

信 息 部/ BIM STUIDO145
workspace
KUKA KR240, 6-axis
CMT Welding station, RCU 5001
KR C2
workbench
track,axis no. 7

信 息 部/ BIM STUIDO
144
01
23
RealTable
1. initialize workbench
2.model parametric data
3.export data sheet
BA
CDA(x,y,z)B(x,y,z)
C(x,y,z)D(x,y,z)
Real World
RealTable
DigitalTable
0(x,y,z)1(x,y,z)
2(x,y,z)3(x,y,z)
Virtual World
unfoldedform
PartBody01PartBody02
Geometrical Set
0
1
2
3
0(x,y,z)1(x,y,z)
2(x,y,z)3(x,y,z)...
excel sheet
01
2
3
x
y
z
P0 P1 P2 P3
4. generate KRL file
5. adapt production
RealTable
6. weld production
7. finish
adapt.datadapt.srcweld.datweld.src
weld.datweld.src
adapt.datadapt.src
Kuka Controller facilities
facilities
Serial Number
Type
02
PTP20%SpeedonWelding
DECL E6POS XP2={X 1507.5752, Y-2322.9973, Z 866.64496,A -108.674698,B 79.9726028,C -69.7420731,S 6,T 50,E1 55.3497086,E2 0.0,E3 0.0,E4 0.0,E5 0.0,E6 0.0}DECL FDAT FP2={TOOL_NO 1,BASE_NO 0,IPO_FRAME #BASE,POINT2[] " "}DECL PDAT PPDAT2={VEL 100.0,ACC 100.0,APO_DIST 100.0,
;FOLD PTP P2 Vel= 20 % PDAT2 Tool[1]:Robacta_CMT_36 Base[0];%{PE}%R 5.4.24,%MKUKATPBASIS,%CMOVE,%VLIN,%P 1:PTP, 2:P2, 3:, 5:20, 7:PDAT2 $BWDSTART = FALSEPDAT_ACT=PPDAT2FDAT_ACT=FP2BAS(#PTP_PARAMS,20)PTP XP2;ENDFOLD
x
y
z
P0 P1 P2 P3
0
1
2
3
Initialization workbenchDuring this period, Kuka Robot measure the coodinate points (A,B,C,D) to initialize the virtual enviroment in CAD/CAM. Generate KRL file
Using KRL generation software , adaptting file and welding file will be generated basing on the excel sheet file.
Adapting productionIn adatting file, there are 2 or 3 points. using this points to adapt metal pieces to pricse positon. this is a preparation step for next welding.
welding productionKuka robot read the welding file to weld the metal pieces.
Modelling parametric dateInput the coodinate points from Kuka robot, CAD/CAM software (in this case it is CATIA) generate coodinate system base on those initial points.Using assembly workbench to assemble the original CAD design parts into the virtual kuka workbench .
Export data sheetThe digital file which created by CAD/CAM is export to excel sheet.This excel sheet include point locations. those point locations will control the kuka robot mechine by KRL mechine language.
CNCTo be able to generate the welding script for the KUKA robot, we used coordinates from the welding table simulation in CatiaV5. Those were exported to Excel. An custom KRL script generating application reads those coordinates and creates the script. The following diagram explains this process.

信 息 部/ BIM STUIDO
147
initial welding testing

信 息 部/ BIM STUIDO
146
welding table according the welding simulation in CATIA V5

信 息 部/ BIM STUIDO
144
01
23
RealTable
1. initialize workbench
2.model parametric data
3.export data sheet
BA
CDA(x,y,z)B(x,y,z)
C(x,y,z)D(x,y,z)
Real World
RealTable
DigitalTable
0(x,y,z)1(x,y,z)
2(x,y,z)3(x,y,z)
Virtual World
unfoldedform
PartBody01PartBody02
Geometrical Set
0
1
2
3
0(x,y,z)1(x,y,z)
2(x,y,z)3(x,y,z)...
excel sheet
01
2
3
x
y
z
P0 P1 P2 P3
4. generate KRL file
5. adapt production
RealTable
6. weld production
7. finish
adapt.datadapt.srcweld.datweld.src
weld.datweld.src
adapt.datadapt.src
Kuka Controller facilities
facilities
Serial Number
Type
02
PTP20%SpeedonWelding
DECL E6POS XP2={X 1507.5752, Y-2322.9973, Z 866.64496,A -108.674698,B 79.9726028,C -69.7420731,S 6,T 50,E1 55.3497086,E2 0.0,E3 0.0,E4 0.0,E5 0.0,E6 0.0}DECL FDAT FP2={TOOL_NO 1,BASE_NO 0,IPO_FRAME #BASE,POINT2[] " "}DECL PDAT PPDAT2={VEL 100.0,ACC 100.0,APO_DIST 100.0,
;FOLD PTP P2 Vel= 20 % PDAT2 Tool[1]:Robacta_CMT_36 Base[0];%{PE}%R 5.4.24,%MKUKATPBASIS,%CMOVE,%VLIN,%P 1:PTP, 2:P2, 3:, 5:20, 7:PDAT2 $BWDSTART = FALSEPDAT_ACT=PPDAT2FDAT_ACT=FP2BAS(#PTP_PARAMS,20)PTP XP2;ENDFOLD
x
y
z
P0 P1 P2 P3
0
1
2
3
Initialization workbenchDuring this period, Kuka Robot measure the coodinate points (A,B,C,D) to initialize the virtual enviroment in CAD/CAM. Generate KRL file
Using KRL generation software , adaptting file and welding file will be generated basing on the excel sheet file.
Adapting productionIn adatting file, there are 2 or 3 points. using this points to adapt metal pieces to pricse positon. this is a preparation step for next welding.
welding productionKuka robot read the welding file to weld the metal pieces.
Modelling parametric dateInput the coodinate points from Kuka robot, CAD/CAM software (in this case it is CATIA) generate coodinate system base on those initial points.Using assembly workbench to assemble the original CAD design parts into the virtual kuka workbench .
Export data sheetThe digital file which created by CAD/CAM is export to excel sheet.This excel sheet include point locations. those point locations will control the kuka robot mechine by KRL mechine language.
CNCTo be able to generate the welding script for the KUKA robot, we used coordinates from the welding table simulation in CatiaV5. Those were exported to Excel. An custom KRL script generating application reads those coordinates and creates the script. The following diagram explains this process.

信 息 部/ BIM STUIDO
144
01
23
RealTable
1. initialize workbench
2.model parametric data
3.export data sheet
BA
CDA(x,y,z)B(x,y,z)
C(x,y,z)D(x,y,z)
Real World
RealTable
DigitalTable
0(x,y,z)1(x,y,z)
2(x,y,z)3(x,y,z)
Virtual World
unfoldedform
PartBody01PartBody02
Geometrical Set
0
1
2
3
0(x,y,z)1(x,y,z)
2(x,y,z)3(x,y,z)...
excel sheet
01
2
3
x
y
z
P0 P1 P2 P3
4. generate KRL file
5. adapt production
RealTable
6. weld production
7. finish
adapt.datadapt.srcweld.datweld.src
weld.datweld.src
adapt.datadapt.src
Kuka Controller facilities
facilities
Serial Number
Type
02
PTP20%SpeedonWelding
DECL E6POS XP2={X 1507.5752, Y-2322.9973, Z 866.64496,A -108.674698,B 79.9726028,C -69.7420731,S 6,T 50,E1 55.3497086,E2 0.0,E3 0.0,E4 0.0,E5 0.0,E6 0.0}DECL FDAT FP2={TOOL_NO 1,BASE_NO 0,IPO_FRAME #BASE,POINT2[] " "}DECL PDAT PPDAT2={VEL 100.0,ACC 100.0,APO_DIST 100.0,
;FOLD PTP P2 Vel= 20 % PDAT2 Tool[1]:Robacta_CMT_36 Base[0];%{PE}%R 5.4.24,%MKUKATPBASIS,%CMOVE,%VLIN,%P 1:PTP, 2:P2, 3:, 5:20, 7:PDAT2 $BWDSTART = FALSEPDAT_ACT=PPDAT2FDAT_ACT=FP2BAS(#PTP_PARAMS,20)PTP XP2;ENDFOLD
x
y
z
P0 P1 P2 P3
0
1
2
3
Initialization workbenchDuring this period, Kuka Robot measure the coodinate points (A,B,C,D) to initialize the virtual enviroment in CAD/CAM. Generate KRL file
Using KRL generation software , adaptting file and welding file will be generated basing on the excel sheet file.
Adapting productionIn adatting file, there are 2 or 3 points. using this points to adapt metal pieces to pricse positon. this is a preparation step for next welding.
welding productionKuka robot read the welding file to weld the metal pieces.
Modelling parametric dateInput the coodinate points from Kuka robot, CAD/CAM software (in this case it is CATIA) generate coodinate system base on those initial points.Using assembly workbench to assemble the original CAD design parts into the virtual kuka workbench .
Export data sheetThe digital file which created by CAD/CAM is export to excel sheet.This excel sheet include point locations. those point locations will control the kuka robot mechine by KRL mechine language.
CNCTo be able to generate the welding script for the KUKA robot, we used coordinates from the welding table simulation in CatiaV5. Those were exported to Excel. An custom KRL script generating application reads those coordinates and creates the script. The following diagram explains this process.

信 息 部/ BIM STUIDO
144
01
23
RealTable
1. initialize workbench
2.model parametric data
3.export data sheet
BA
CDA(x,y,z)B(x,y,z)
C(x,y,z)D(x,y,z)
Real World
RealTable
DigitalTable
0(x,y,z)1(x,y,z)
2(x,y,z)3(x,y,z)
Virtual World
unfoldedform
PartBody01PartBody02
Geometrical Set
0
1
2
3
0(x,y,z)1(x,y,z)
2(x,y,z)3(x,y,z)...
excel sheet
01
2
3
x
y
z
P0 P1 P2 P3
4. generate KRL file
5. adapt production
RealTable
6. weld production
7. finish
adapt.datadapt.srcweld.datweld.src
weld.datweld.src
adapt.datadapt.src
Kuka Controller facilities
facilities
Serial Number
Type
02
PTP20%SpeedonWelding
DECL E6POS XP2={X 1507.5752, Y-2322.9973, Z 866.64496,A -108.674698,B 79.9726028,C -69.7420731,S 6,T 50,E1 55.3497086,E2 0.0,E3 0.0,E4 0.0,E5 0.0,E6 0.0}DECL FDAT FP2={TOOL_NO 1,BASE_NO 0,IPO_FRAME #BASE,POINT2[] " "}DECL PDAT PPDAT2={VEL 100.0,ACC 100.0,APO_DIST 100.0,
;FOLD PTP P2 Vel= 20 % PDAT2 Tool[1]:Robacta_CMT_36 Base[0];%{PE}%R 5.4.24,%MKUKATPBASIS,%CMOVE,%VLIN,%P 1:PTP, 2:P2, 3:, 5:20, 7:PDAT2 $BWDSTART = FALSEPDAT_ACT=PPDAT2FDAT_ACT=FP2BAS(#PTP_PARAMS,20)PTP XP2;ENDFOLD
x
y
z
P0 P1 P2 P3
0
1
2
3
Initialization workbenchDuring this period, Kuka Robot measure the coodinate points (A,B,C,D) to initialize the virtual enviroment in CAD/CAM. Generate KRL file
Using KRL generation software , adaptting file and welding file will be generated basing on the excel sheet file.
Adapting productionIn adatting file, there are 2 or 3 points. using this points to adapt metal pieces to pricse positon. this is a preparation step for next welding.
welding productionKuka robot read the welding file to weld the metal pieces.
Modelling parametric dateInput the coodinate points from Kuka robot, CAD/CAM software (in this case it is CATIA) generate coodinate system base on those initial points.Using assembly workbench to assemble the original CAD design parts into the virtual kuka workbench .
Export data sheetThe digital file which created by CAD/CAM is export to excel sheet.This excel sheet include point locations. those point locations will control the kuka robot mechine by KRL mechine language.
CNCTo be able to generate the welding script for the KUKA robot, we used coordinates from the welding table simulation in CatiaV5. Those were exported to Excel. An custom KRL script generating application reads those coordinates and creates the script. The following diagram explains this process.

信 息 部/ BIM STUIDO
144
01
23
RealTable
1. initialize workbench
2.model parametric data
3.export data sheet
BA
CDA(x,y,z)B(x,y,z)
C(x,y,z)D(x,y,z)
Real World
RealTable
DigitalTable
0(x,y,z)1(x,y,z)
2(x,y,z)3(x,y,z)
Virtual World
unfoldedform
PartBody01PartBody02
Geometrical Set
0
1
2
3
0(x,y,z)1(x,y,z)
2(x,y,z)3(x,y,z)...
excel sheet
01
2
3
x
y
z
P0 P1 P2 P3
4. generate KRL file
5. adapt production
RealTable
6. weld production
7. finish
adapt.datadapt.srcweld.datweld.src
weld.datweld.src
adapt.datadapt.src
Kuka Controller facilities
facilities
Serial Number
Type
02
PTP20%SpeedonWelding
DECL E6POS XP2={X 1507.5752, Y-2322.9973, Z 866.64496,A -108.674698,B 79.9726028,C -69.7420731,S 6,T 50,E1 55.3497086,E2 0.0,E3 0.0,E4 0.0,E5 0.0,E6 0.0}DECL FDAT FP2={TOOL_NO 1,BASE_NO 0,IPO_FRAME #BASE,POINT2[] " "}DECL PDAT PPDAT2={VEL 100.0,ACC 100.0,APO_DIST 100.0,
;FOLD PTP P2 Vel= 20 % PDAT2 Tool[1]:Robacta_CMT_36 Base[0];%{PE}%R 5.4.24,%MKUKATPBASIS,%CMOVE,%VLIN,%P 1:PTP, 2:P2, 3:, 5:20, 7:PDAT2 $BWDSTART = FALSEPDAT_ACT=PPDAT2FDAT_ACT=FP2BAS(#PTP_PARAMS,20)PTP XP2;ENDFOLD
x
y
z
P0 P1 P2 P3
0
1
2
3
Initialization workbenchDuring this period, Kuka Robot measure the coodinate points (A,B,C,D) to initialize the virtual enviroment in CAD/CAM. Generate KRL file
Using KRL generation software , adaptting file and welding file will be generated basing on the excel sheet file.
Adapting productionIn adatting file, there are 2 or 3 points. using this points to adapt metal pieces to pricse positon. this is a preparation step for next welding.
welding productionKuka robot read the welding file to weld the metal pieces.
Modelling parametric dateInput the coodinate points from Kuka robot, CAD/CAM software (in this case it is CATIA) generate coodinate system base on those initial points.Using assembly workbench to assemble the original CAD design parts into the virtual kuka workbench .
Export data sheetThe digital file which created by CAD/CAM is export to excel sheet.This excel sheet include point locations. those point locations will control the kuka robot mechine by KRL mechine language.
CNCTo be able to generate the welding script for the KUKA robot, we used coordinates from the welding table simulation in CatiaV5. Those were exported to Excel. An custom KRL script generating application reads those coordinates and creates the script. The following diagram explains this process.

信 息 部/ BIM STUIDO
148
Digital sensors provide a detailed feedback about the process
Kinematics: welding simulation in Catia

信 息 部/ BIM STUIDO
144
01
23
RealTable
1. initialize workbench
2.model parametric data
3.export data sheet
BA
CDA(x,y,z)B(x,y,z)
C(x,y,z)D(x,y,z)
Real World
RealTable
DigitalTable
0(x,y,z)1(x,y,z)
2(x,y,z)3(x,y,z)
Virtual World
unfoldedform
PartBody01PartBody02
Geometrical Set
0
1
2
3
0(x,y,z)1(x,y,z)
2(x,y,z)3(x,y,z)...
excel sheet
01
2
3
x
y
z
P0 P1 P2 P3
4. generate KRL file
5. adapt production
RealTable
6. weld production
7. finish
adapt.datadapt.srcweld.datweld.src
weld.datweld.src
adapt.datadapt.src
Kuka Controller facilities
facilities
Serial Number
Type
02
PTP20%SpeedonWelding
DECL E6POS XP2={X 1507.5752, Y-2322.9973, Z 866.64496,A -108.674698,B 79.9726028,C -69.7420731,S 6,T 50,E1 55.3497086,E2 0.0,E3 0.0,E4 0.0,E5 0.0,E6 0.0}DECL FDAT FP2={TOOL_NO 1,BASE_NO 0,IPO_FRAME #BASE,POINT2[] " "}DECL PDAT PPDAT2={VEL 100.0,ACC 100.0,APO_DIST 100.0,
;FOLD PTP P2 Vel= 20 % PDAT2 Tool[1]:Robacta_CMT_36 Base[0];%{PE}%R 5.4.24,%MKUKATPBASIS,%CMOVE,%VLIN,%P 1:PTP, 2:P2, 3:, 5:20, 7:PDAT2 $BWDSTART = FALSEPDAT_ACT=PPDAT2FDAT_ACT=FP2BAS(#PTP_PARAMS,20)PTP XP2;ENDFOLD
x
y
z
P0 P1 P2 P3
0
1
2
3
Initialization workbenchDuring this period, Kuka Robot measure the coodinate points (A,B,C,D) to initialize the virtual enviroment in CAD/CAM. Generate KRL file
Using KRL generation software , adaptting file and welding file will be generated basing on the excel sheet file.
Adapting productionIn adatting file, there are 2 or 3 points. using this points to adapt metal pieces to pricse positon. this is a preparation step for next welding.
welding productionKuka robot read the welding file to weld the metal pieces.
Modelling parametric dateInput the coodinate points from Kuka robot, CAD/CAM software (in this case it is CATIA) generate coodinate system base on those initial points.Using assembly workbench to assemble the original CAD design parts into the virtual kuka workbench .
Export data sheetThe digital file which created by CAD/CAM is export to excel sheet.This excel sheet include point locations. those point locations will control the kuka robot mechine by KRL mechine language.
CNCTo be able to generate the welding script for the KUKA robot, we used coordinates from the welding table simulation in CatiaV5. Those were exported to Excel. An custom KRL script generating application reads those coordinates and creates the script. The following diagram explains this process.

信 息 部/ BIM STUIDO
149
weld the next edge
inflationassemled frame
welding

信 息 部/ BIM STUIDO
143
facadeassembly
INSTALLATION
welding single pieces and table simulation in CATIA V5
welding frame + inflation = FINAL PIECE UNFOLDED FORM

信 息 部/ BIM STUIDO
153
(Ton)0.70.4
0.1 0.2 0.3M1M2
Pressure 0.4 0.5 0.6 0.7 0.81.01 .3 1.62 .0 2.3 2.65
0.6 0.7 1.0 1.41 .7 2.12 .4 2.85
0.9 1.0 1.1 1.2 1.33.053.25
3.53.7
3.94.15
4.44.65
55.4
(mm)(mm)
M1
M2
1,50m
break at 1.4 t
Testing Multiple tests had to be done to prove the application as a facade component. We carried out the 3-Points-Bending-Test at the Hochschule Luzern, Kompetenzzentrum Fassaden- und Metallbau assisted by Ueli Zihlmann. 1,4 tons were necessary to break the linear component.
强度测试

信 息 部/ BIM STUIDO
152

信 息 部/ BIM STUIDO
159
areas of higher deformationand round section
Initial organic shapes achieved using the UF concept:
Thanks This work is based on our Master of Advanced Studies final thesis at the ETH Zurich in 2009/2010.
We thank Ludger Hovestadt who made this project possible.
We would like to thank some persons from the Chair for their advice: Oskar Zieta, Philipp Dohmen, Steffen Lemmerzahl, Michael Hansmeyer & Manuel Kretzer
Thanks also to our MAS collegues for their support and friendship. Special thanks goes to Dieter Schmitter for his friendly help during the long welding sessions.
Also thanks to our extern testing advisor Ueli Zihlmann

信 息 部/ BIM STUIDO
CAD历史及发展趋势
CAAD 简介及案例
数字建造( Fab lab)
BIM信息技术——从蓝图到数据库
生成技术(编程&脚本)——emergence
大数据+社区

信 息 部/ BIM STUIDO
生成技术(编程&脚本)——emergence
emergence的出现,是人工智能,信息论,数字技术,经济,气候研究,材料科学和生物工程的一个重要的新概念。

信 息 部/ BIM STUIDO
这一概念基于以下这么一个假设:在复杂系统之中同时存在着突破性的和连贯的结构。系统的形态和属性在复杂系统自组织的过程中所产生的。

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO
“城市不仅可以接受不同种类的阶级,人群。同时城市也是由许多基于自身不同的原因而不停建设、改造的建筑组成的产物。虽然它可能会稳定一段时间,但是在细部上永远的不断变化。只有局部控制其增长和形式。城市有没有最终的结果,永远是一个阶段的连续继承“(凯文林奇,1960年)

信 息 部/ BIM STUIDO
Architecture and cities

信 息 部/ BIM STUIDO
“自下而上”

信 息 部/ BIM STUIDO
Cellular AutomataL-systemTiling(Voronoi)Aggregation(DLA)
通过分解整个设计流程为不同的部分,然后将不同的部分整合成一个灵活的计算机程序。与传统的方法比较起来,这样我们可以通过调整参数,以创建更多的变化。

信 息 部/ BIM STUIDO
HD Fair
2007-2009
Partner:
Messe Schweiz AG, Basel, CH
Team:
Markus Braach, Oliver Fritz
Scale: Architecture

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO
National Beijing Olympic Stadium (CN)
2003
KAISERSROT in collaboration with Herzog & de Meuron, Basel
This is a perfect example for optimization. To do it “by hand” you sit there for weeks and whenever you intro-duce a new beam to limit the number of too-big-red-fields you get too many too-small-black-fields and so on. The software does not do it any different, but less tedious and much faster. And by doing so, it is able to opti-mize the ratio of big and small fields by using the evolutionary technique of genetic algorithms. The structure is increasing in “fitness” and becomes optimized. An example of how to get a performative grip on disorder.
Partner: Herzog + deMeuron, Basel, CH
Team: Markus Braach, Oliver Fritz
Scale: Architecture

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO
DesignYourOwnNeighbourhood
2001
Partner:
KCAP, NL (Kees Christiaanse Architects and Planners)
Team:
Markus Braach, Oliver Fritz,
Frederick Künzel (KCAP), Frank Werner (KCAP)
Scale: Urban Design

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO

信 息 部/ BIM STUIDO
86
Macro Thinking & Micro actionThesis by Haidong MaMentor: Benjamin Dillenburger, Michael Hansmeyer
Simulation Algorithm of
Macro Thinking & Micro actionSimulation Algorithm of
Thesis by Haidong MaMentor:Benjamin DillenburgerMichael Hansmeyer
MALL MALL
MALL
GG
G
B
B
B
P
P
P
P
P
P
Content
1. Context & proposal
2. Site & parameterization
3. Simulation software
3.1. algorithm-macro thinking
3.2. algorithm-micro action
3.3. software output
4. Conclusion & feedback
5. Reference
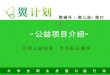
AbstractThis thesis aims to provide alternative and innovative plan models for Chinese cities that are currently under rapid development. Using digital technology, the author strive to integrate the diverse local structure in social and spatial aspects with the ambition and demands of city’s expansion. Firstly, though parameterization, the local infrastructure, industry chain and living patterns were diagrammatized, quantized and input as reference database. Secondly, digital sequence simulation is used as an innovative tool to promote interventions among above elements and generate emergent process of living activities which interact to each other base on cellular automata theory. Finally, building behaviors of this area were predicted and outputted possible master plan in desirable future. This study arrives at an open scenario the feasible prospect. A conclusion is drawn to reflect the process, achievement and weakness of the research.

信 息 部/ BIM STUIDO
87
Content
1. Context & proposal
2. Site & parameterization
3. Simulation software
3.1. algorithm-macro thinking
3.2. algorithm-micro action
3.3. software output
4. Conclusion & feedback
5. Reference
AbstractThis thesis aims to provide alternative and innovative plan models for Chinese cities that are currently under rapid development. Using digital technology, the author strive to integrate the diverse local structure in social and spatial aspects with the ambition and demands of city’s expansion. Firstly, though parameterization, the local infrastructure, industry chain and living patterns were diagrammatized, quantized and input as reference database. Secondly, digital sequence simulation is used as an innovative tool to promote interventions among above elements and generate emergent process of living activities which interact to each other base on cellular automata theory. Finally, building behaviors of this area were predicted and outputted possible master plan in desirable future. This study arrives at an open scenario the feasible prospect. A conclusion is drawn to reflect the process, achievement and weakness of the research.
1950
15% 20%40%
60%
19701990
20102030
China’s Urbanization Process
professional designer
Monotonous
top down
Context“China is undergoing a process of unprecedented urbaniza-tion, with cities often being built from scratch in just three to �ve years. Four hundred new cites will be built over the next 20years with newly urbanized populations of over 240 million. So rapid and intense is this process that consump-tion of energy and natural resources is outstripping supply, posing unique challenges for the creation of sustainable
Proposal output: integrate the diverse local structure in social and spatial aspects with the ambition and demands of city’s expansion.2
Proposal
designerstake holderresident
Diverse
intervention
self-organization
top downbottom up
Context & Proposal
Current output: To achieve the fast development, cities are considered as machines which are centrally operated by the forces of politics and economics in
China

信 息 部/ BIM STUIDO
88
Sequence Programs
1 Designcreative
school, studio, exhibition, gallery, salon, showcase…2 Production Research workshop, studio, headquarter, gallery…3 Module Making
production
workshop, factories…4 Parts Manufacturing workshop, factories, logistics…5 Assembling workshop, factories, logistics…6 Wholesale wholesale market, mall, sale agent, logistics...7 Retail
consumption-
vertisement...8 After Service
ParameterizationInfrastructures & facilities
Industry Chain
Social demandThere are six individual social demand have been parameterized in this site: 1) wholesale merchant, 2) rich wholesale businessman, 3) immigrant worker, 4) jobless immigrant, 5) local villager and 6) urban citizens.
Site descriptionThe southern districts in Beijing are selected as a research site. Formed by the process of self-organization, this area shows strong internal power to grow; however, as the expansion of the city has reached here, it brought intensive external development pressure to the area.
L, M FacilitiesS,XS Facilities
Site & Parameterization
This site has concentrated more than 460 clothing factories, ranging from parts manufacturing, module production to assembling. Furthermore, there are 39 big wholesale malls and market for garments, clothing materials and
XL,L,M Roads S,XS Roads
Site in Beijing

信 息 部/ BIM STUIDO
89
infrasturcturebuilding behavior
social demand
addingdeleting
adapting
macro thinking micro action
industry chain
Simulation Software
AlgorithmBy the in�uence of industry chain, infrastructures and social demand, building behaviors try to be stable by adapting, adding or deleting.
input: rules output: masterplan

信 息 部/ BIM STUIDO
90
Algorithm - macro thinking
(0,0)
(-600,-2000) (1200,-2000)
(-600,1000) (1200,1000)
de�ne a rectangle of site area
2010.01 2020.01
DHM Develop Sequence
integration isolation 1 2 3 4
timeline
de�ne a time scope of site development to simplify calculation.
software initialization
De�ne space & timeTo simplify calculation, before inputting parameter and starting simulation, software initialize site area by rectangle ABCD and dividing time scope as four phase from 2010 to 2020.
A B
CD

信 息 部/ BIM STUIDO 91
Algorithm - macro thinking
(0,0)
(-600,-2000) (1200,-2000)
(-600,1000) (1200,1000)
de�ne a rectangle of site area
2010.01 2020.01
DHM Develop Sequence
integration isolation 1 2 3 4
timeline
de�ne a time scope of site development to simplify calculation.
software initialization
De�ne space & timeTo simplify calculation, before inputting parameter and starting simulation, software initialize site area by rectangle ABCD and dividing time scope as four phase from 2010 to 2020.
A B
CD
Algorithm - macro thinkinginfrasturcture input & output
input: streets & date (de�ned by urban designer)
output: blocks (calculated by software)
20122015
2020
By input of infrastructure development strategy which is de�ned by urban designer in di�erent phase, this software will output blocks which is calculated by GIS spatial algorithm.

信 息 部/ BIM STUIDO
92
Algorithm - macro thinkingblock input & facilities output
input output
1
L street
p0
p1p2
p3L street
p0
p1p2
p3
formulafacilities’ number=(5~10)/100 X street lengthfacilites’ size=?{if (area< 500,000sqm)?=1;if(area<1000,000sqm)?=2;if(area>1000sqm)?=3;}ratio of L, M, S facilites’ scale=?{�rstly, calculate the location. then calculate the distance to main streets.if (distance<10m)L=0%M=5%if (distance<100m)L=5%M=10%if(distance>100m)L=0%M=20%}
block
length:
area: 250,000sqm
400m
location: 30% nearby main street
facilities
numbers:
size list
35
ratio list
According to blocks’ property, software will generate facilities which are based on access abilities. �eld research and urban designer’s knowledge provided the formulas for software calculation. a) facilities’ numbers=formula(street length) b) ratio of L, M, S facilities’ scale=formula(distance to main streets).

信 息 部/ BIM STUIDO
93
industry chain input & programs output
programs output (software)
1
Des
ign
Production
Research
Module Making
Parts
ManufactureAs
sem
bleWholesale
RetailAfter-
Service
23456
78
CREATIVE
CONSU
MPTION
SchoolStudio
Exhibition
Studio
Studio
WorkshopHeadquater
ResearchLabExhibition
Exhibition
Workshop
Factory
Workshop
FactoryLogistics
Workshop
Factory
Logistics
Logistics
Mall
Wholesalemarket
Shopping mall
Flagshipshops
Flagshipshops
Logistics
Boutique
headquater
�agship
PRODOCUT
ION
. . . . . .............
school.number
school.size
research studio.number
research studio.size
exhibition.number
exhibition.size
conference.number
conference.size
workshop.number
workshop.size
headquater.number
headquater.size
factory.number
factory.size
logistics.number
logistics.size
wholesale.number
wholesale.size
mall.number
mall.size
�agship.number
�agship.size
boutique.number
boutique.size
Algorithm - macro thinking
Industry Chain
industry sequence0
1
2
3
4
5
6
7
8
prod
uctio
n re
asea
ch
part
s m
anuf
actu
ring
mod
ul p
arts
man
ufac
turin
g
ass
embl
y sale
afte
r ser
vice
econ
omic
ben
efit
industry chain phase input (urban designer)
1 2 3 4
According to industry chain phase which is based on industry development discipline and inputted by urban designer, this software will output programs which is calculated by industry-related database.

信 息 部/ BIM STUIDO
94
output: anchors location and identity(programs and intensity)
LOG.
When the interventional simulation starts, all anchors strive for optimization in their built-in demands. After a certain amount of time, equilibrium is achieved and the process stops. Triggered by the anchors, spatial properties are generated automatically based on the in�uence from the anchors. The closer to the anchor, the greater in�uence it has. Gradient color is used to display spatial properties, where a darker color indicates a greater in�uence and vice versa.Through this method, software can generate various distribution patterns. Then, designers can select one for
Algorithm - macro thinking
anchors input (urban designer)
output (software)
schoolresearch/studio
exhibitionconference
workshop
headquater
factory
logistics
wholesale
mall
flagship
boutique
1logisticsanchor
2educationanchor
3fashionanchor
4conferenceanchor
related building programs output
village buildings
merchant familystudio/workereducation/researcher
local urban villagerlogistics serverfactory/worker
In this area, there are six living patterns. During the step of intervention, the anchors create environment to attract new groups of people, such as designers, researchers, and so on. To simulate this process, we adopt the concept of tolerance value from Micromotives and Macrobehavious3 by Thomas Schelling (1978). The principle is that people select where they live and work depending on similarities in neighbor-hood (including cultural and social quality). The tolerance value is introduced to the new comers and is de�ned as the number of similar neighbor-hoods in the vicinity. For example, if there is no similar neighborhood, the value will be zero; if there is one, the value should be one and so on and so forth. Before starting this simulation step,
social demandAlgorithm - macro thinking
rules: neighbors/living cost/facilities/anchors1) neighbor.numbers: 8 neighbor.radious: 80m2) facilities distrubtion S facilities >= 10(distance <80m) M facilities L facilites3) anchors sequence
MALL
MALL
MALL
MALLB
P
P
penetrate into city
G
GGBP
B
B
Weekly Life
CORE AREA
Monthly Life
penetrate into city
P
P
MALL
G
G
B
B
B
Daiy LifeCORE AREA
distance
facilities
local urban villager education/reseacher
CORE AREA
distance

信 息 部/ BIM STUIDO
95
output: anchors location and identity(programs and intensity)
LOG.
When the interventional simulation starts, all anchors strive for optimization in their built-in demands. After a certain amount of time, equilibrium is achieved and the process stops. Triggered by the anchors, spatial properties are generated automatically based on the in�uence from the anchors. The closer to the anchor, the greater in�uence it has. Gradient color is used to display spatial properties, where a darker color indicates a greater in�uence and vice versa.Through this method, software can generate various distribution patterns. Then, designers can select one for
Algorithm - macro thinking
anchors input (urban designer)
output (software)
schoolresearch/studio
exhibitionconference
workshop
headquater
factory
logistics
wholesale
mall
flagship
boutique
1logisticsanchor
2educationanchor
3fashionanchor
4conferenceanchor
related building programs output
village buildings
merchant familystudio/workereducation/researcher
local urban villagerlogistics serverfactory/worker
In this area, there are six living patterns. During the step of intervention, the anchors create environment to attract new groups of people, such as designers, researchers, and so on. To simulate this process, we adopt the concept of tolerance value from Micromotives and Macrobehavious3 by Thomas Schelling (1978). The principle is that people select where they live and work depending on similarities in neighbor-hood (including cultural and social quality). The tolerance value is introduced to the new comers and is de�ned as the number of similar neighbor-hoods in the vicinity. For example, if there is no similar neighborhood, the value will be zero; if there is one, the value should be one and so on and so forth. Before starting this simulation step,
social demandAlgorithm - macro thinking
rules: neighbors/living cost/facilities/anchors1) neighbor.numbers: 8 neighbor.radious: 80m2) facilities distrubtion S facilities >= 10(distance <80m) M facilities L facilites3) anchors sequence
MALL
MALL
MALL
MALLB
P
P
penetrate into city
G
GGBP
B
B
Weekly Life
CORE AREA
Monthly Life
penetrate into city
P
P
MALL
G
G
B
B
B
Daiy LifeCORE AREA
distance
facilities
local urban villager education/reseacher
CORE AREA
distance

信 息 部/ BIM STUIDO
96
current point(Pn)
neighbor area(radius)
Software automatically generates three di�erent building behaviors.
base on cellular automata theory
adapting
deleting
adding
1
0
2
Depending on spatial properties of site generated at the �rst step, the software strives to distribute and modify village living patterns (cells). Each cell tries to �nd their position in the site and meet their neighborhood within the tolerance value.When the simulation is started, the initial situation is determined by assigning a state (live pattern) for each cell from the intervention step. A new generation of cells is then created according to spatial properties of the site and the tolerance rule. The tolerance rule determines that the new state of each cell is based on their current states and the cells around. Eventually if all the cells meet the rules, they will be stable. It should take a �nite amount of time to reach this stable state. Otherwise, designers should reduce tolerance value and modify the initial parameters in the intervention step to achieve convergence.4
self-organization building behaviorsAlgorithm - micro action

信 息 部/ BIM STUIDO
97java simulation software/developer haidong ma
date: 2015ancher numbers: 4
develop levels: 2sum of buildings: 850
floor area ratio(FAR): 1.2
MALL
MALL
G
G
B
BB
B
BB
B
BBB
B
B B
B
B
B
B
B B B
BB
P
P
P
P
P
P
P
P
P
P
P
P
Software Output
The complete simulation process is a sequence loop. At the �rst step (intervention), the processing is initialized and parametric rules considering the infrastructure and basic programs are set up. At the second step (self-organization), the villages re�ect the parametric elements and start the process of self-organization. At the third step (auto-generation), local infrastructure and related facilities are generated automatically. When the three steps sequence accomplished, simulation process goes back to the �rst intervention step for the next computing circle. After several iterations of processing and intervention from designers, simulation process will arrive at the �nal
Develop Sequence
integration isolation developed current 1 2 3 4
Infrastructure Upgradingauto generation by develop sequence
selected by manual

信 息 部/ BIM STUIDO
98
"Macro Thinking & Micro Action" has been selected as one of the 10 best papers of the eCAADe2010 conference.
conclusion & feedback
Software & Algorithm Support:Java, provided an object-oriented languageProcessing, provided a visual contextPostSQL & PostGIS, provided a related spatial database and algorithm
Reference1. Laurence Liauw, 2008, ‘New Urban China’, Architectual Design, Pro�le No 195, Wiley2. Alexander, C 1965, ‘A city is not a tree’, Architectural Forum, Vol 122, No 1&2, April 1965, pp 58-62.3. Schelling, T. C 1978, Micromotives and macrobehavior, W. W. Norton, New York.4. Batty, M 2005, Cities and Complexity: Understand cities with cellular automata, agent-based models and fractals’, The MIT Press, Cambridge, Massachusetts.
[1] http://en.wikipedia.org/wiki/Computer_simulation.[2] http://en.wikipedia.org/wiki/Cellular_automaton.
ConclusionThe �nal version application still is on processing though, it is clear that digital parameterization and simulation can be considered as new possible urban tools to model the realities and generate solutions. In this case, by introducing anchor points urban design principle and cellular automata digital method. Computational simulation of urban developing can happen under the control of certain parametric rules and setting up people living behavior. Because this new tools embrace emerging process into strategy, one of the bene�ts of this new tools is that di�erent users can be involved into the process. It helps to �nd a more adaptive proposal for cities. The critical issue of this method is to create a convergence programming sequence structure that has the ability to simulate a whole scene of urban develop procedure, otherwise simulation will be endless.Feedback

信 息 部/ BIM STUIDO
98
"Macro Thinking & Micro Action" has been selected as one of the 10 best papers of the eCAADe2010 conference.
conclusion & feedback
Software & Algorithm Support:Java, provided an object-oriented languageProcessing, provided a visual contextPostSQL & PostGIS, provided a related spatial database and algorithm
Reference1. Laurence Liauw, 2008, ‘New Urban China’, Architectual Design, Pro�le No 195, Wiley2. Alexander, C 1965, ‘A city is not a tree’, Architectural Forum, Vol 122, No 1&2, April 1965, pp 58-62.3. Schelling, T. C 1978, Micromotives and macrobehavior, W. W. Norton, New York.4. Batty, M 2005, Cities and Complexity: Understand cities with cellular automata, agent-based models and fractals’, The MIT Press, Cambridge, Massachusetts.
[1] http://en.wikipedia.org/wiki/Computer_simulation.[2] http://en.wikipedia.org/wiki/Cellular_automaton.
ConclusionThe �nal version application still is on processing though, it is clear that digital parameterization and simulation can be considered as new possible urban tools to model the realities and generate solutions. In this case, by introducing anchor points urban design principle and cellular automata digital method. Computational simulation of urban developing can happen under the control of certain parametric rules and setting up people living behavior. Because this new tools embrace emerging process into strategy, one of the bene�ts of this new tools is that di�erent users can be involved into the process. It helps to �nd a more adaptive proposal for cities. The critical issue of this method is to create a convergence programming sequence structure that has the ability to simulate a whole scene of urban develop procedure, otherwise simulation will be endless.Feedback

信 息 部/ BIM STUIDO
CAD历史及发展趋势
CAAD 简介及案例
数字建造( Fab lab)
生成技术(编程&脚本)——emergence
BIM信息技术——从蓝图到数据库
大数据+社区

信 息 部/ BIM STUIDO
计算机辅助建筑设计 ——BIM/数字建造/编程&脚本主讲人: 马海东 BIM研究室总工程师 ETHZ MAS
谢谢!