Embed Size (px)
DESCRIPTION
第 2 章 数控系统的加工控制原理 2.1 概述 2.1.1 插补的基本概念 数控系统根据零件轮廓线型的有限信息,计算出刀具的一系列加工点、完成所谓的数据 “ 密化 ” 工作。 插补有二层意思: 一是用小线段逼近产生基本线型(如直线、圆弧等); 二是用基本线型拟和其它轮廓曲线。 插补运算具有实时性,直接影响刀具的运动。插补运算的速度和精度是数控装置的重要指标。插补原理也叫轨迹控制原理。五坐标插补加工仍是国外对我国封锁的技术。. 2.1 概述. 计算机数控: 利用计算机强大的数值计算和信息处理能力,对产品加工过程进行数字化信息处理与控制。. - PowerPoint PPT Presentation
Citation preview
第 2 章 数控系统的加工控制原理 2.1 概述 2.1.1 插补的基本概念 数控系统根据零件轮廓线型的有限信息,计算出刀具的一系列加工点、完成所谓的数据“密化”工作。 插补有二层意思: 一是用小线段逼近产生基本线型(如直线、圆弧等); 二是用基本线型拟和其它轮廓曲线。 插补运算具有实时性,直接影响刀具的运动。插补运算的速度和精度是数控装置的重要指标。插补原理也叫轨迹控制原理。五坐标插补加工仍是国外对我国封锁的技术。
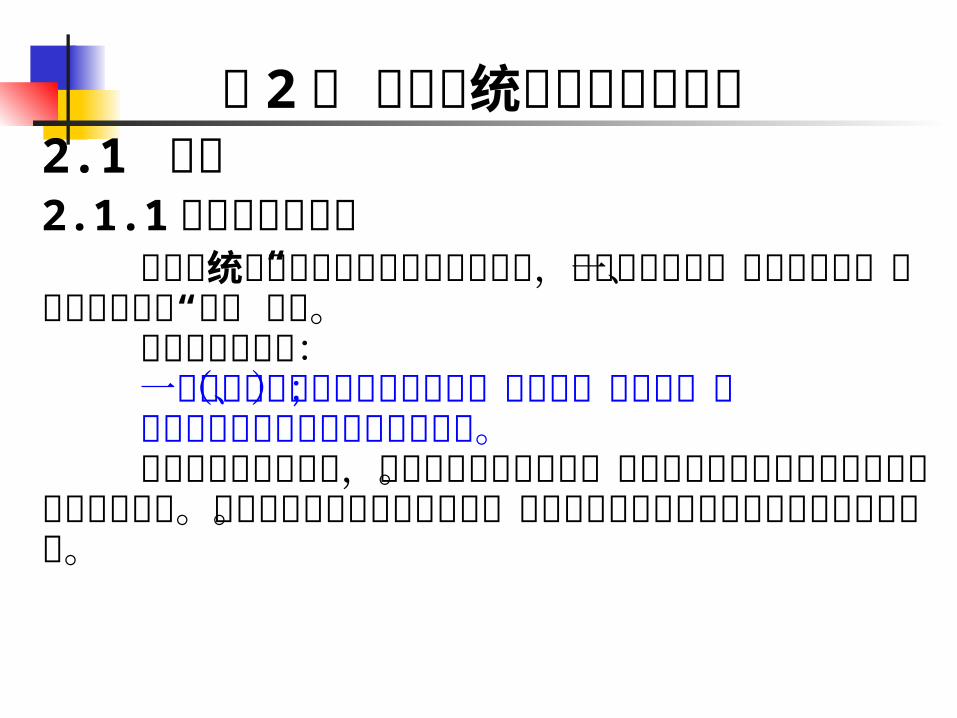
计算机数控: 利用计算机强大的数值计算和信息处理能力,对产品加工过程进行数字化信息处理与控制。
工艺分析
数值计算
后置处理
轨迹插补
信息处理
运动控制
机床驱动
刀具工装
机床结构
数控加工信息
机床控制信息
几何工艺信息
零件成品
1计算机数控编程
2计算机加工控制 加工过程
反馈信息
零件
CAD
CAM
2.1 概述
零件CAD
模型
加工表面
加工表面分解
加工路径
刀具路径计算
刀具路径
刀具路径分解
数控曲线
数控轨迹插补
运动指令
加工表面形成
刀具轨迹合成
坐标运动实现
刀具轨迹
坐标运动
加工表面 零
件成品
分解 合成
*
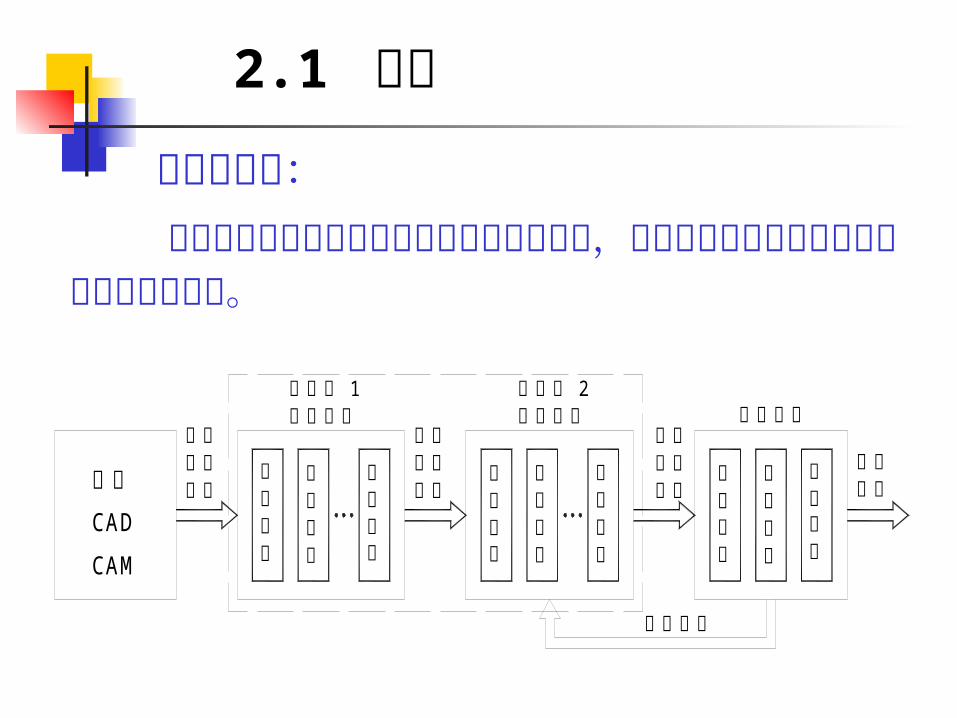
数控加工原理与实现过程 一、数控加工的“分解与合成”原理
分解:将零件设计信息细化为控制机床坐标运动的细微指令。合成:通过驱动装置实现微小运动,通过机床结构及工艺过程将各坐标轴的微小运动进行合成形成刀具运动轨迹及加工轨迹,通过加工轨迹合成形成工件表面。
加工路径 加工表面
工件
刀具球心
刀具路径
加工路径接触点
球头铣刀
工件
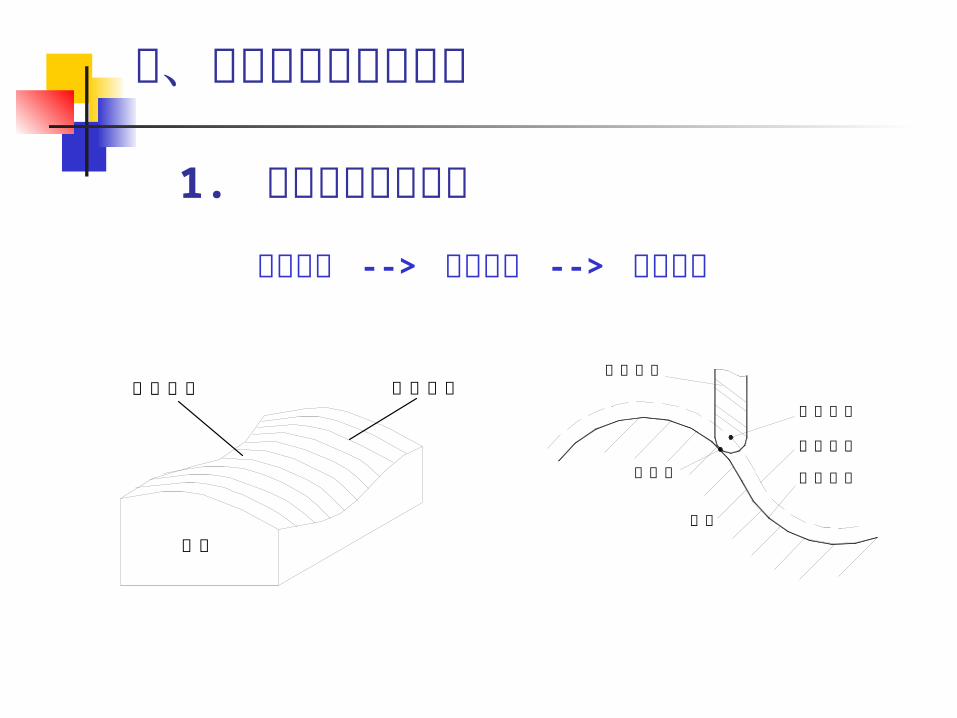
1. 零件加工表面分解
加工表面 --> 加工路径 --> 刀具路径
二、数控加工的实现过程
2. 刀具运动路径分解
刀具运动路径分解 : 将刀具运动路径分解成数控系统所能接受和执行的最基本的数控曲线。
分解方法: (1) 直接分解法 (2) 函数逼近法 (3) 曲线拟合法
3. 数控轨迹插补
路径、轨迹与轨迹插补: 路径表示刀具将要走过的道路,只具有几何形状的概念,没有时间上的概念。 轨迹表示刀具不仅要沿给定的路径运动,而且还规定了完成这一运动所需的时间,即轨迹不但具有几何形状的概念 , 而且还包含速度和加速度等物理概念。 插补是根据给定的基本数控曲线、刀具路径或零件表面等几何元素描述信息,在这些元素上的已知点之间,按要求的精度和速度进行坐标点密化的过程。
X
Y
δ y
δ x
被插补曲线
插补轨迹
Xs,Ys
Xe,Ye
Y
X O
Xs,Ys
Xe, Ye
插补轨迹
被插补曲线
插补点
Y
X O
Xs,Ys
Xe, Ye 粗插补直线段
被插补曲线
粗插补点
精插补点
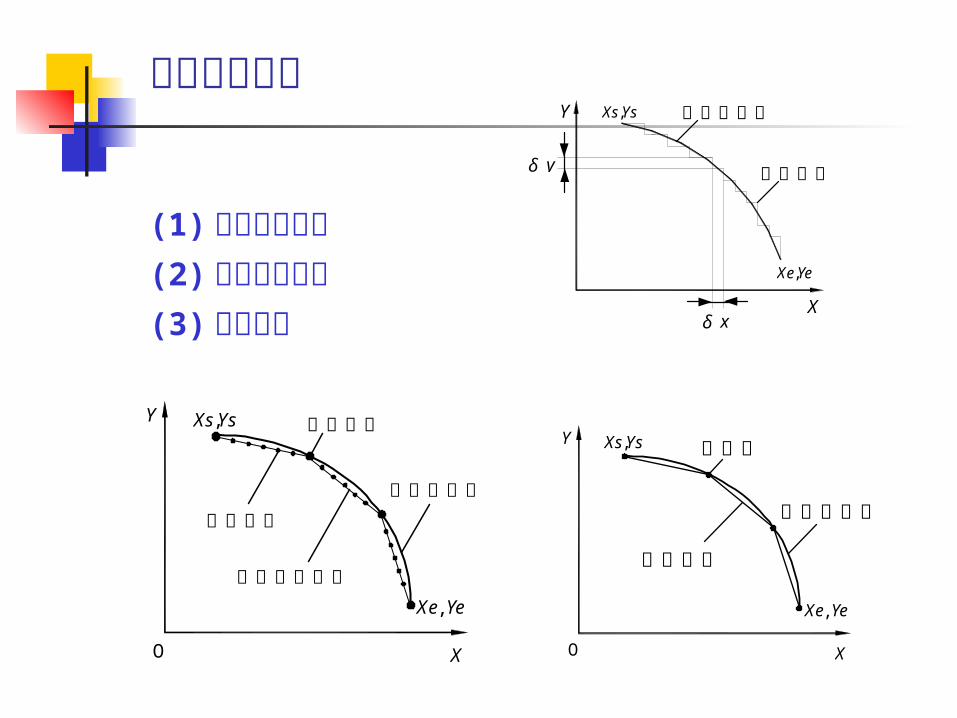
轨迹插补方法
(1) 脉冲增量插补(2)数据采样插补(3)混合插补
2.2 插补方法的分类 硬件插补器
完成插补运算的装置或程序称为插补器 软件插补器 软硬件结合插补器
1. 基准脉冲插补 每次插补结束仅向各运动坐标轴输出一个控制脉冲,各坐标仅产生一个脉冲当量或行程的增量。脉冲序列的频率代表坐标运动的速度,而脉冲的数量代表运动位移的大小。基准脉冲插补的方法很多,如逐点比较法、数字积分法、脉冲乘法器等。
2.2.2 插补方法的分类
2. 数据采样插补 采用时间分割思想,根据编程的进给速度将轮廓曲线分割为每个插补周期的进给直线段(又称轮廓步长)进行数据密化,以此来逼近轮廓曲线。然后再将轮廓步长分解为各个坐标轴的进给量(一个插补周期的近给量),作为指令发给伺服驱动装置。该装置按伺服检测采样周期采集实际位移,并反馈给插补器与指令比较,有误差运动,误差为零停止,从而完成闭环控制。 数据采样插补方法有:直线函数法、扩展 DDA 、二阶递归算法等。
一、基准脉冲插补 1 逐点比较法 早期数控机床广泛采用的方法,又称代数法、醉步法,适 用于开环系统。1. 插补原理及特点 原理:每次仅向一个坐标轴输出一个进给脉冲,而每走一步都要
通过偏差函数计算,判断偏差点的瞬时坐标同规定加工轨迹之间的偏差,然后决定下一步的进给方向。每个插补循环由偏差判别、进给、偏差函数计算和终点判别四个步骤组成。
逐点比较法可以实现直线插补、圆弧插补及其它曲安插补。特点:运算直观,插补误差不大于一个脉冲当量,脉冲输出均匀,调节方便。
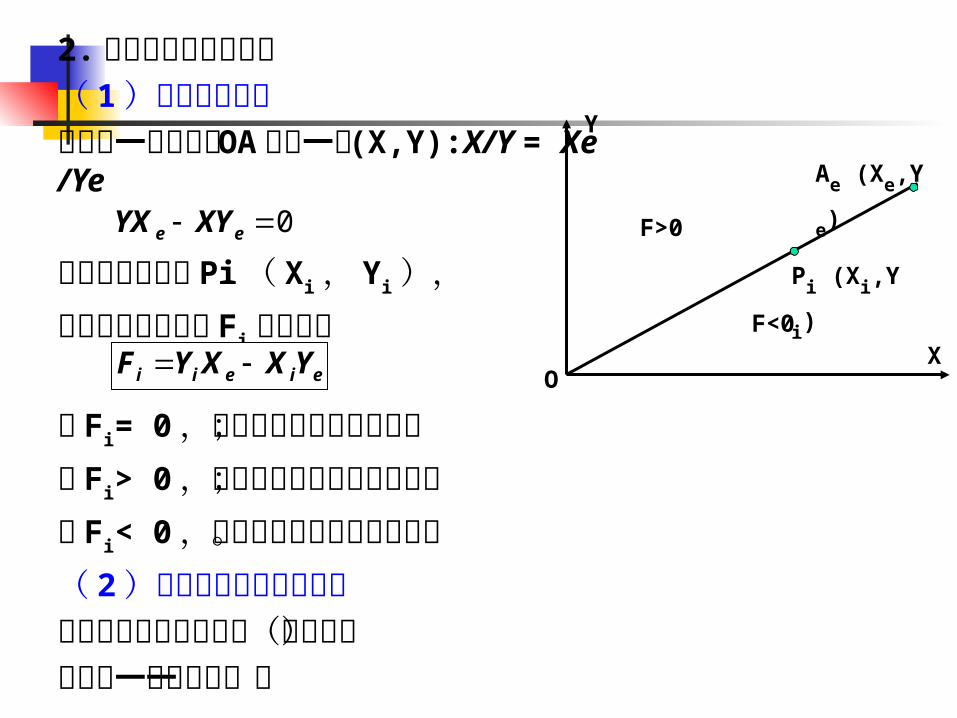
2. 逐点比较法直线插补( 1 )偏差函数构造 对于第一象限直线 OA上任一点 (X,Y):X/Y = Xe/Ye
若刀具加工点为 Pi( Xi , Yi ),则该点的偏差函数 Fi可表示为
若 Fi= 0,表示加工点位于直线上;若 Fi> 0,表示加工点位于直线上方;若 Fi< 0,表示加工点位于直线下方。( 2 )偏差函数字的递推计算采用偏差函数的递推式(迭代式)既由前一点计算后一点
0 ee XYYX
eieii YXXYF
Y
XF<0
F>0
Pi (Xi,Yi)
Ae (Xe,Ye)
O
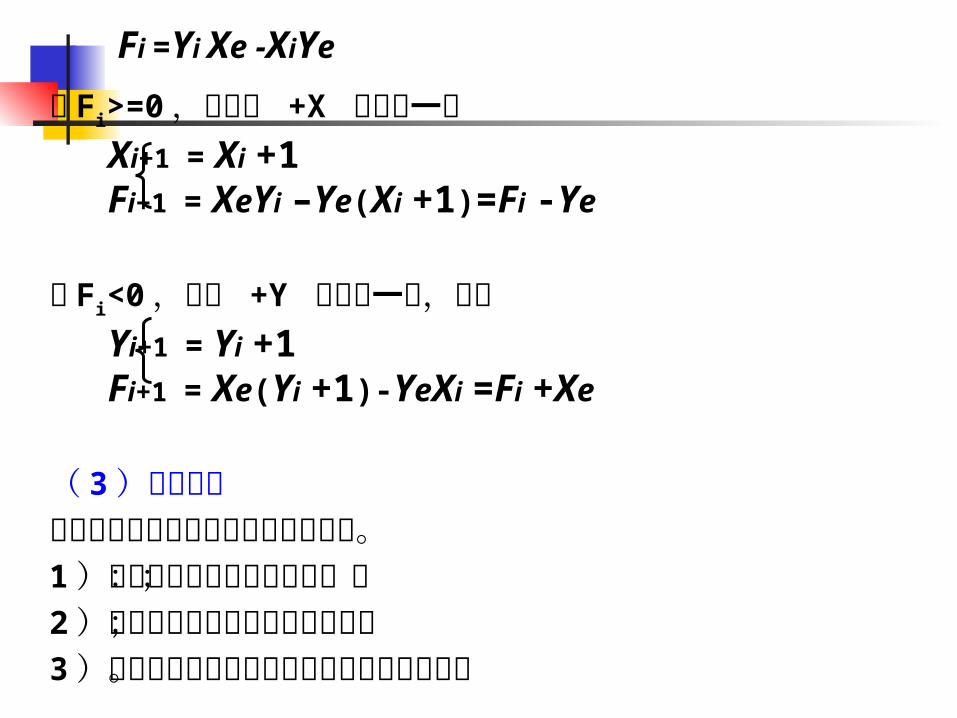
Fi =Yi Xe -XiYe若 Fi>=0,规定向 +X 方向走一步 Xi+1 = Xi +1 Fi+1 = XeYi –Ye(Xi +1)=Fi -Ye
若 Fi<0,规定 +Y 方向走一步,则有 Yi+1 = Yi +1 Fi+1 = Xe(Yi +1)-YeXi =Fi +Xe
( 3 )终点判别直线插补的终点判别可采用三种方法。1 )判断插补或进给的总步数:;2 )分别判断各坐标轴的进给步数;3 )仅判断进给步数较多的坐标轴的进给步数。
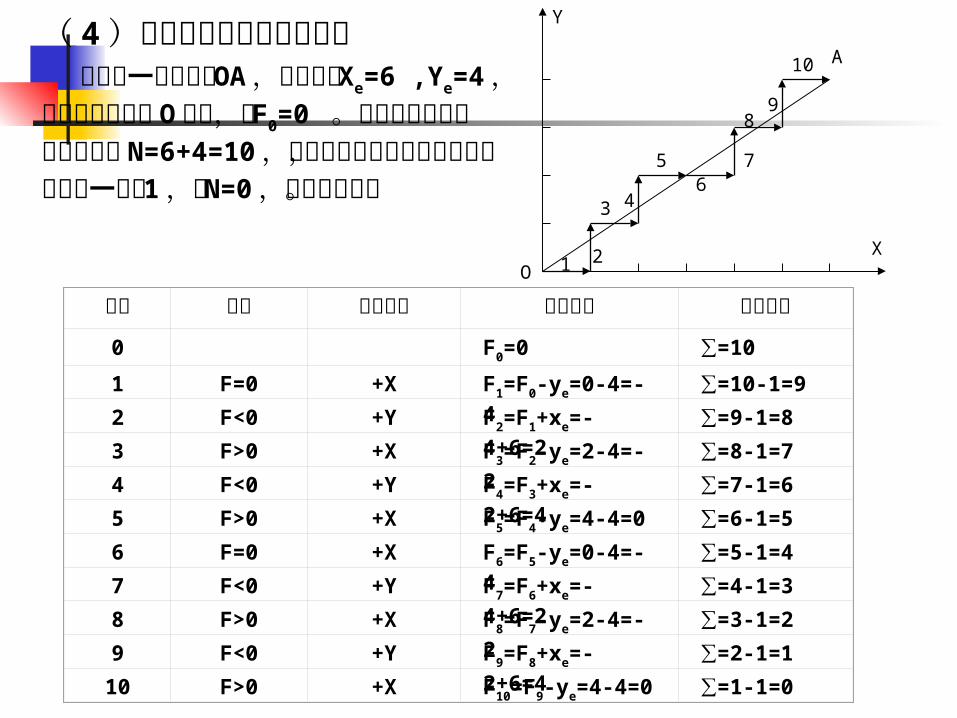
( 4 )逐点比较法直线插补举例 对于第一象限直线 OA,终点坐标 Xe=6 ,Ye=4,插补从直线起点 O开始,故 F0=0 。终点判别是判断进给总步数 N=6+4=10,将其存入终点判别计数器中,每进给一步减 1 ,若N=0,则停止插补。 步数 判别 坐标进给 偏差计算 终点判别
0 F0=0 ∑=101 F=0 +X F1=F0-ye=0-
4=-4∑=10-1=9
2 F<0 +Y F2=F1+xe=-4+6=2
∑=9-1=83 F>0 +X F3=F2-ye=2-
4=-2∑=8-1=7
4 F<0 +Y F4=F3+xe=-2+6=4
∑=7-1=65 F>0 +X F5=F4-ye=4-
4=0∑=6-1=5
6 F=0 +X F6=F5-ye=0-4=-4
∑=5-1=47 F<0 +Y F7=F6+xe=-
4+6=2∑=4-1=3
8 F>0 +X F8=F7-ye=2-4=-2
∑=3-1=29 F<0 +Y F9=F8+xe=-
2+6=4∑=2-1=1
10 F>0 +X F10=F9-ye=4-4=0
∑=1-1=0
O
A
98
75
43
21
6
10
Y
X
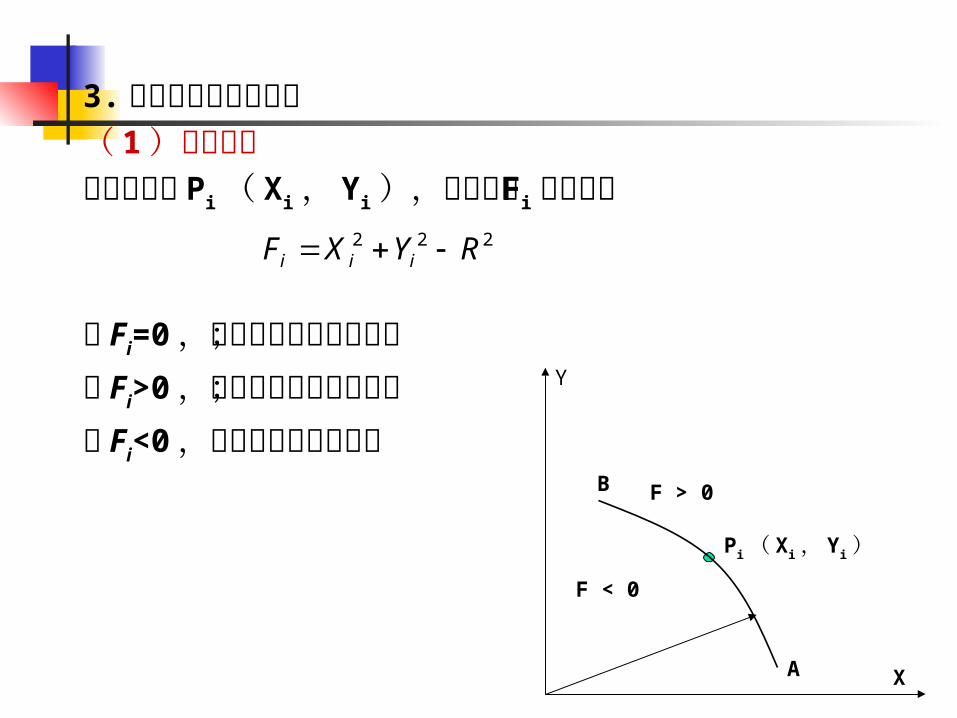
3. 逐点比较法圆弧插补 ( 1 )偏差函数 任意加工点 Pi ( Xi , Yi ),偏差函数 Fi可表示为
若 Fi=0,表示加工点位于圆上;若 Fi>0,表示加工点位于圆外;若 Fi<0,表示加工点位于圆内
222 RYXF iii
X
Y
Pi ( Xi , Yi )
A
B F > 0
F < 0
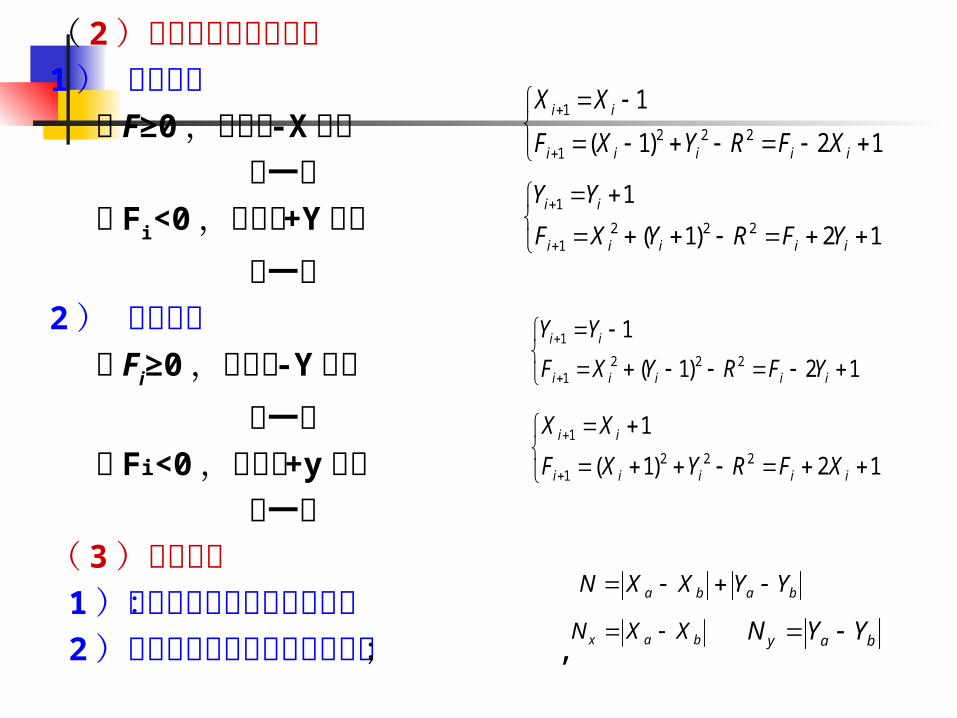
( 2 )偏差函数的递推计算 1 ) 逆圆插补 若 F≥0,规定向 -X方向 走一步 若 Fi<0,规定向 +Y方向 走一步 2 ) 顺圆插补 若 Fi≥0,规定向 -Y方向 走一步 若 Fi<0,规定向 +y方向 走一步( 3 )终点判别 1 )判断插补或进给的总步数: 2 )分别判断各坐标轴的进给步数; ,
12)1(
1222
1
1
iiiii
ii
XFRYXF
XX
12)1(
1222
1
1
iiiii
ii
YFRYXF
YY
12)1(
1222
1
1
iiiii
ii
YFRYXF
YY
12)1(
1222
1
1
iiiii
ii
XFRYXF
XX
baba YYXXN
bax XXN bay YYN
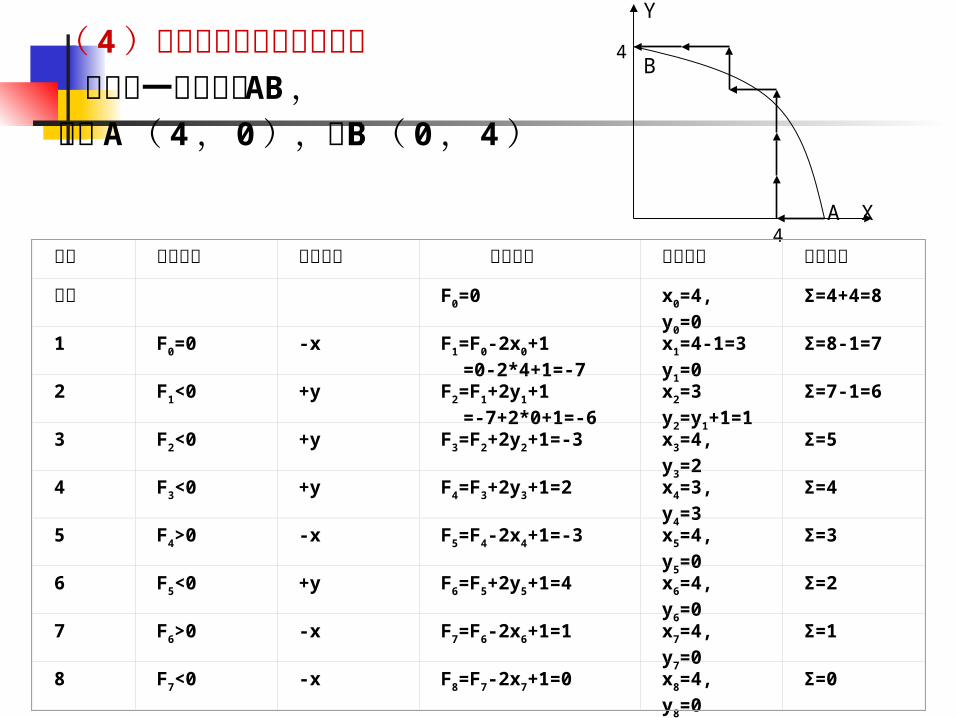
( 4)逐点比较法圆弧插补举例 对于第一象限圆弧 AB,起点 A( 4, 0),终点 B( 0,4)
A
B
Y
X4
4
步数 偏差判别 坐标进给 偏差计算 坐标计算 终点判别
起点 F0=0 x0=4, y0=0
Σ=4+4=8
1 F0=0 -x F1=F0-2x0+1 =0-2*4+1=-7
x1=4-1=3y1=0
Σ=8-1=7
2 F1<0 +y F2=F1+2y1+1 =-7+2*0+1=-6
x2=3y2=y1+1=1
Σ=7-1=6
3 F2<0 +y F3=F2+2y2+1=-3 x3=4, y3=2
Σ=5
4 F3<0 +y F4=F3+2y3+1=2 x4=3, y4=3
Σ=4
5 F4>0 -x F5=F4-2x4+1=-3 x5=4, y5=0
Σ=3
6 F5<0 +y F6=F5+2y5+1=4 x6=4, y6=0
Σ=2
7 F6>0 -x F7=F6-2x6+1=1 x7=4, y7=0
Σ=1
8 F7<0 -x F8=F7-2x7+1=0 x8=4, y8=0
Σ=0
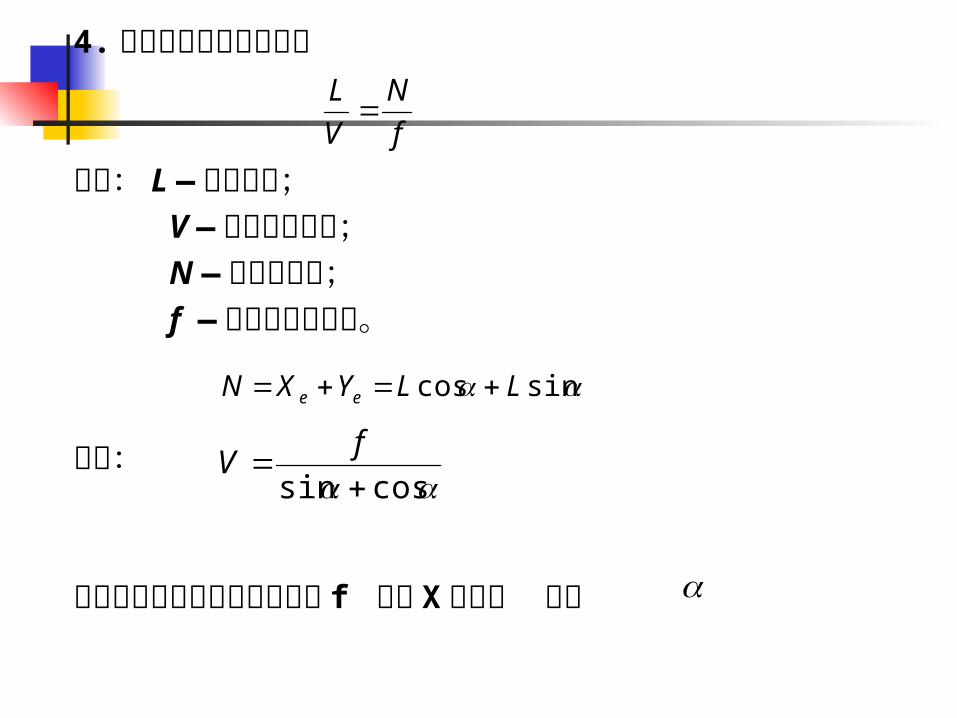
4. 逐点比较法的速度分析
式中: L —直线长度;V —刀具进给速度;N —插补循环数;f —插补脉冲的频率。
所以:
刀具进给速度与插补时钟频率 f 和与 X 轴夹角 有关
f
N
V
L
sincos LLYXN ee
cossin
fV
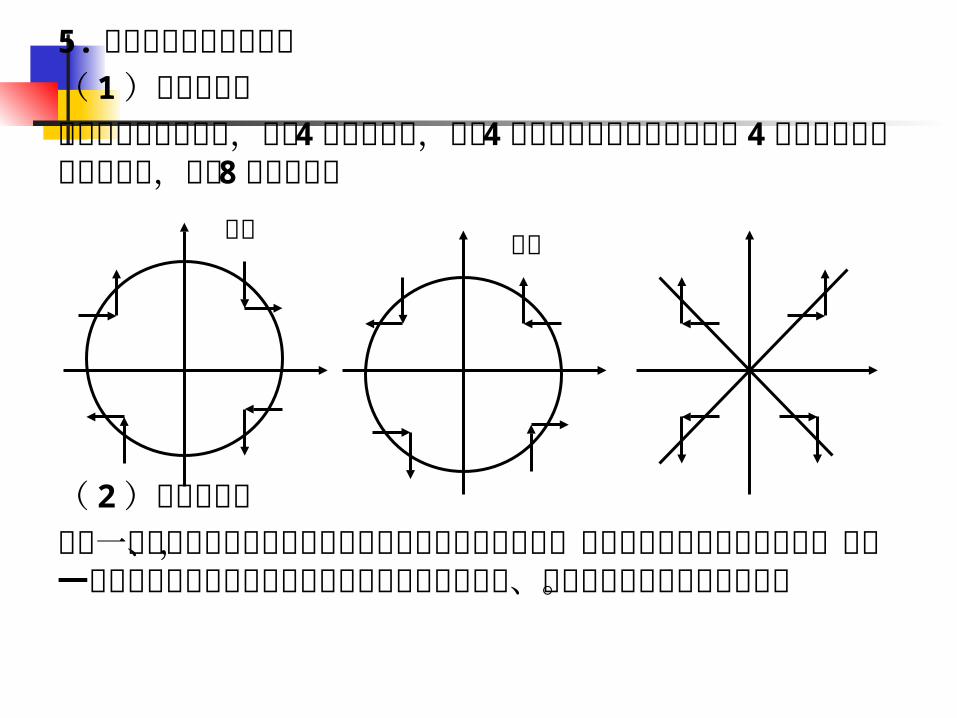
5. 逐点比较法的象限处理 ( 1 )分别处理法 四个象限的直线插补,会有 4组计算公式,对于 4个象限的逆时针圆弧插补和 4个象限的顺时针圆弧插补,会有 8组计算公式
( 2)坐标变换法 用第一象限逆圆插补的偏差函数进行第三象限逆圆和第二、四象限顺圆插补的偏差计算,用第一象限顺圆插补的偏差函数进行第三象限顺圆和第二、四象限逆圆插补的偏差计算。
顺圆 逆圆
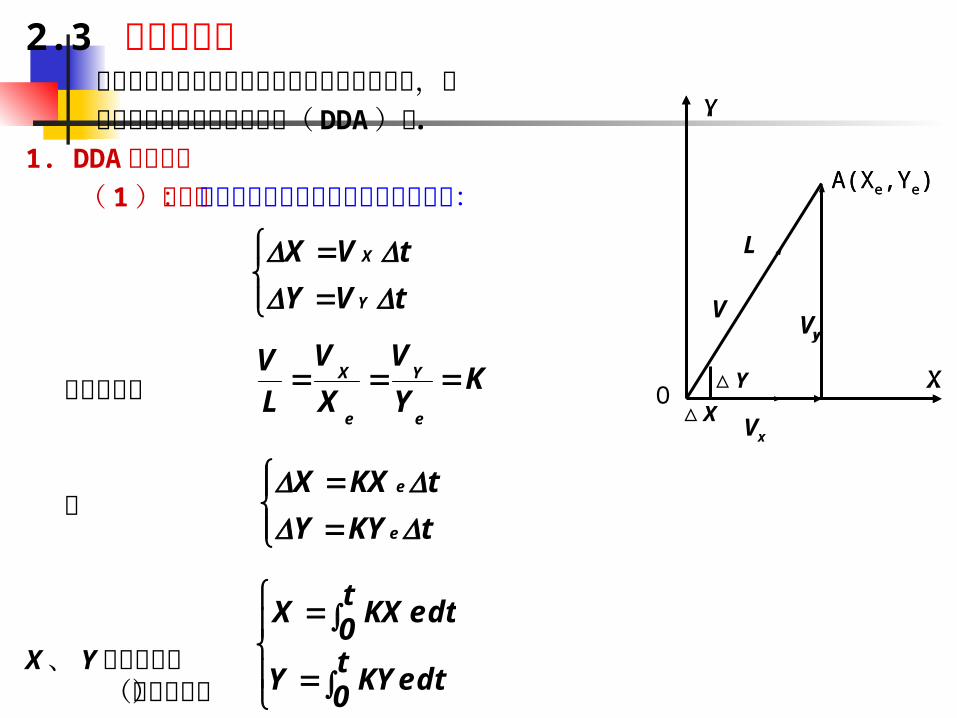
2.3 数字积分法 用数字积分的方法计算刀具沿各坐标轴的位移,数 字积分法又称数字微分分析( DDA)法 .1. DDA直线插补 ( 1 )原理:积分的过程可以用微小量的累加近似:
由右图所示
则
X、 Y方向的位移 (积分形式)
tVY
tVX
Y
X
KY
V
X
V
L
V
e
Y
e
X
tKYY
tKXX
e
e
X
Y
A(Xe,Ye)
Vy
X
Y
A(Xe,Ye)
Vx
Vy
V
O △Y
△X
t0
dteKYY
t0
dteKXX
L
(累加形式)
其中, m 为累加次数(容量)取为整数, m=0〜 2N-1 ,共 2N 次 (N为累加器位数 ) 。令△ t =1,mK =1 ,则K =1/m=1/2N 。
则
( 2 )结论:直线插补从始点走向终点的过程,可以看作是各坐标轴每经过一个单位时间间隔,分别以增量 kxe ( xe / 2N
)及 k ( ye / 2N )同时累加的过
程。累加的结果为:
m
1iee
m
1iee
tmKYtYKY
tmKXtXKX
m
i
eNe
m
i
eNe
YY
Y
XX
X
1
1
2
2
DDA直线插补:以Xe/2N 、 ye/2N (二进制小数,形式上即 Xe、ye )作为被积函数,同时进行积分(累加), N为累加器的位数,当累加值大于 2N -1 时,便发生溢出,而余数仍存放在累加器中。
积分值 = 溢出脉冲数代表的值 + 余数 当两个积分累加器根据插补时钟脉冲同步累加时,用这些溢出脉冲数(最终 X坐标 Xe个脉冲、 Y坐标 ye个脉冲)分别控制相应坐标轴的运动,加工出要求的直线。( 3 )终点判别 累加次数、即插补循环数是否等于 2N可作为 DDA法直线插补判别终点的依据。 ( 4)组成:二坐标 DDA直线插补器包括X积分器和 Y 积分器,每个积分器都由被积函数寄存器 JVX (速度寄器)和累加器 JRX(余数寄存器)组成。初始时, X被积函数寄存器存Xe, Y 被积函数寄存器存 ye。
2.DDA法直线插补举例插补第一象限直线 OE,起点为 O( 0, 0),终点为 E( 5, 3 )。取被积函数寄存器分别为 JVX 、 JVY ,余数寄存器分别为 JRX 、 JRY ,终点计数器为 JE ,均为三位二进制寄存器。 累加次数 X 积分器 Y 积分器 终点计
数器JE 备 注 JVX(Xe) JRX 溢出 Jvy(Ye) JRy 溢出
0 101 000 011 000 000 初始状态1 101 101 011 011 001 第一次迭代2 101 010 1 011 110 010 X 溢出3 101 111 011 001 1 011 Y 溢出4 101 100 1 011 100 100 X 溢出5 101 001 1 011 111 101 X 溢出6 101 110 011 010 1 110 Y 溢出7 101 011 1 011 101 111 X 溢出8 101 000 1 011 000 1 000 X,Y 溢出
t
A(5,3)
X
Y
3. DDA法圆弧插补(1) DDA法圆弧插补的积分表达式
由
令则
圆弧插补时,是对切削点的即时坐标 Xi与 Yi的数值分别进行累加
KX
V
Y
V
R
V
i
Y
i
X
iX KYV
iY KXV
1tN
K2
1
m
iiN
m
iiN
XY
YX
1
1
2
12
1
V Vy
Vx P
A
B
R
X
Y
O
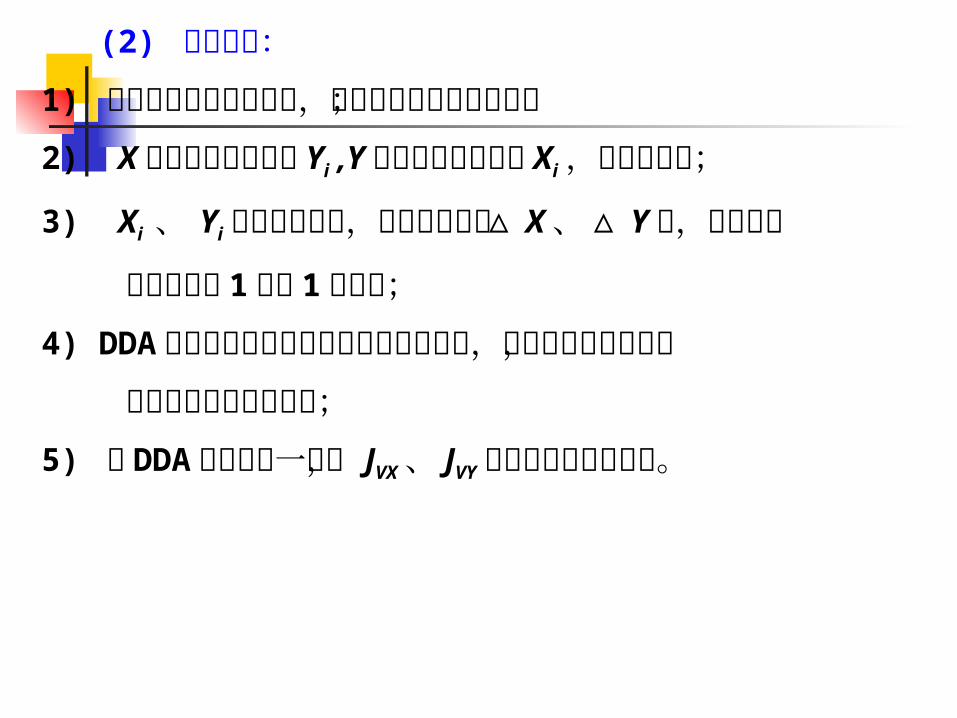
(2) 其特点是:
1) 各累加器的初始值为零,各寄存器为起点坐标值;
2) X被寄函数积存器存 Yi ,Y被寄函数积存器存 Xi ,为动点坐标;
3) Xi 、 Yi 在积分过程中,产生进给脉冲△ X 、△ Y 时,要对相应
坐标进行加 1 或减 1 的修改;
4) DDA 圆弧插补的终点判别要有二个计数器,哪个坐标终点到了,
哪个坐标停止积分迭代;
5) 与 DDA 直线插补一样, JVX 、 JVY中的值影响插补速度。
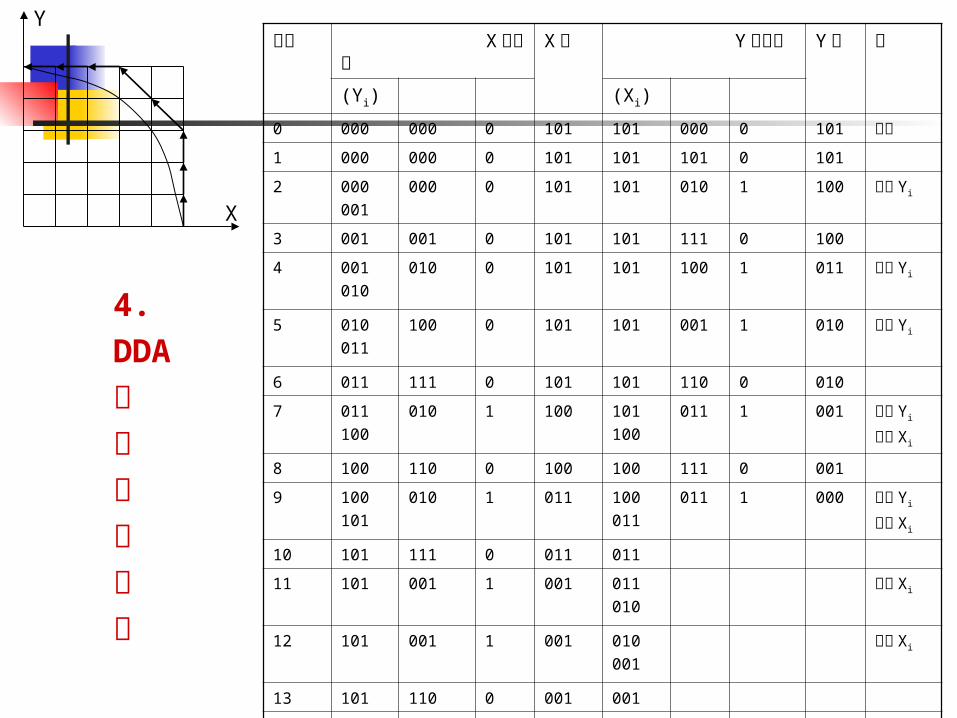
4.DDA圆弧插补举例
Y
X
次序 X 积分器 X 终 Y 积分器 Y 终 注(Yi) (Xi)
0 000 000 0 101 101 000 0 101 初始
1 000 000 0 101 101 101 0 101
2 000001
000 0 101 101 010 1 100 修正 Yi
3 001 001 0 101 101 111 0 100
4 001010
010 0 101 101 100 1 011 修正 Yi
5 010011
100 0 101 101 001 1 010 修正 Yi
6 011 111 0 101 101 110 0 010
7 011100
010 1 100 101100
011 1 001 修正 Yi
修正 Xi
8 100 110 0 100 100 111 0 001
9 100101
010 1 011 100011
011 1 000 修正 Yi
修正 Xi
10 101 111 0 011 011
11 101 001 1 001 011010
修正 Xi
12 101 001 1 001 010001
修正 Xi
13 101 110 0 001 001
14 101 011 1 000 001000
结束
2.4 数据采样插补 2.4.1 概述 1. 数据采样插补的基本原理 粗插补:采用时间分割思想,根据进给速度 F和插补周期 T,将廓型曲线分割成一段段的轮廓步长 L,L=FT,然后计算出每个插补周期的坐标增量。 精插补:根据位置反馈采样周期的大小,由伺服系统完成。 2. 插补周期和检测采样周期 插补周期大于插补运算时间与完成其它实时任务时间之和 ,现代数控系统一般为 2~4ms,有的已达到零点几毫秒。插补周期应是位置反馈检测采样周期 的整数倍。3. 插补精度分析 直线插补时,轮廓步长与被加工直线重合,没有插补误差。 圆弧插补时,轮廓步长作为弦线或割线对圆弧进行逼近,存在半径误差。
era
Y Y
X XOO
erl
δ rδ*
r
ra eri
era
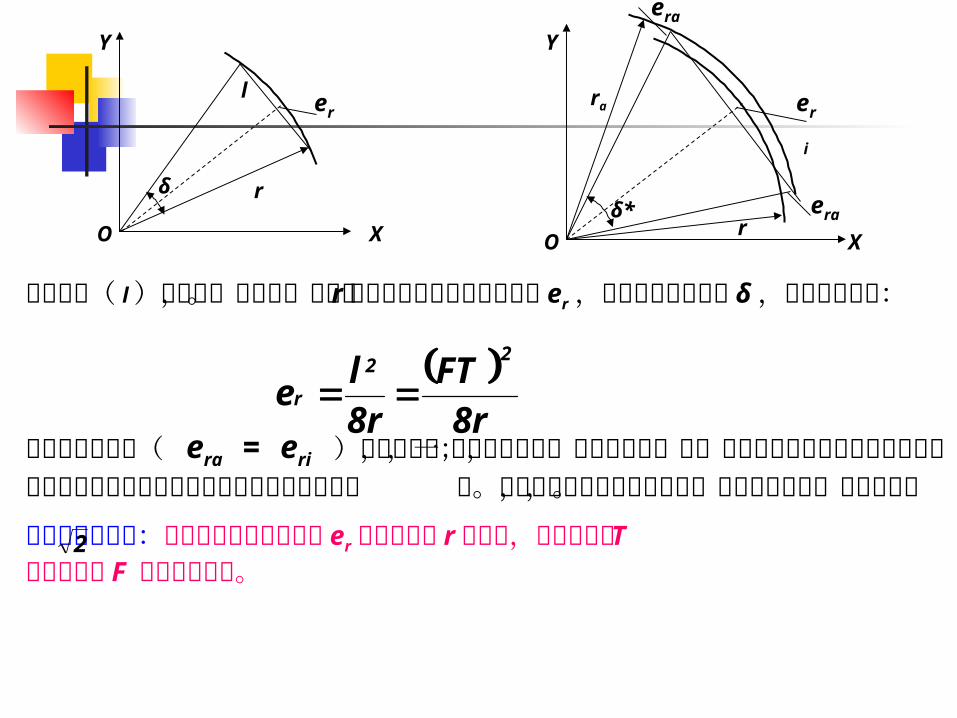
采用弦线( l )逼近时,见左图。半径为 r 的被逼近圆弧最大半径误差 er ,其对应的圆心角为 δ ,由图可推导出:
当采用内外均差( era = eri )的割线时,半径误差更小,是内接弦的一半;若令二种逼近的半径误差相等,则内外均差弦的轮廓步长或步距角是内接弦时的 倍。但由于内外均差割线逼近时,插补计算复杂,很少应用。
由上面分析可知:圆弧插补时的半径误差 er 与圆弧半径 r 成反比,与插补周期T 和进给速度 F 的平方成正比。
r8
FT
r8
le
22
r
2
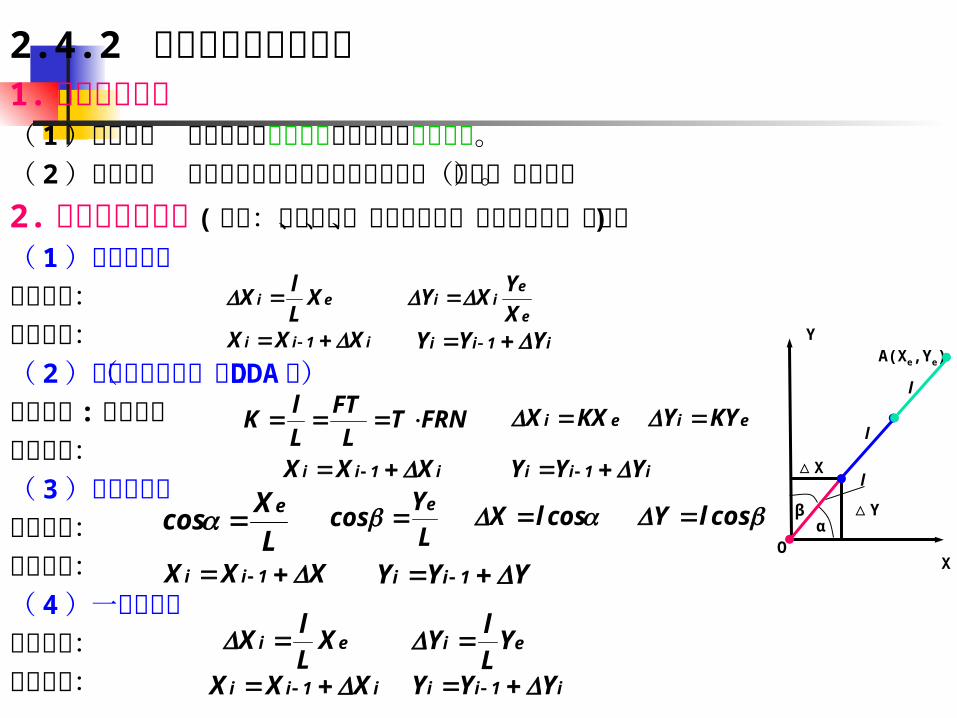
2.4.2 数据采样法直线插补 1. 插补计算过程 ( 1 )插补准备 主要是计算轮廓步长及其相应的坐标增量。( 2 )插补计算 实时计算出各插补周期中的插补点(动点)坐标值。2. 实用的插补算法 ( 原则:算法简单、计算速度快、插补误差小、精度高 )( 1 )直接函数法插补准备:插补计算:( 2 )进给速率数法(扩展DDA法)插补准备 : 步长系数 插补计算:( 3 )方向余弦法插补准备:插补计算:( 4)一次计算法插补准备:
插补计算:
ei XL
lX
e
eii
X
YXY
i1ii XXX i1ii YYY
FRNTL
FT
L
lK ei KXX ei KYY
i1ii XXX i1ii YYY
L
Xcos
eL
Ycos
e coslX coslY
XXX 1ii YYY 1ii
ei XL
lX ei Y
L
lY
i1ii XXX i1ii YYY
X
A(Xe,Ye)
△Y
△X
βα
Y
O
l
l
l
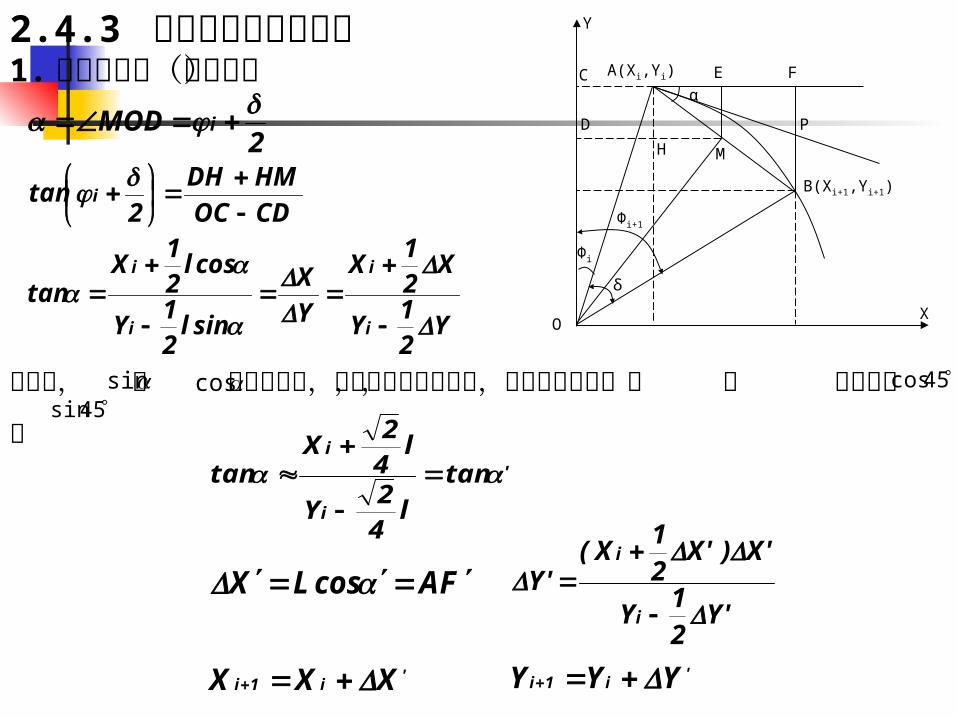
2.4.3 数据采样法圆弧插补1.直线函数法(弦线法)
上式中, 和 都是未知数,难以用简单方法求解,采用近似计算,用 和 来取代,
则
P
A(Xi,Yi)
B(Xi+1,Yi+1)
E
X
Y
F
H M
α
δ
Φi
Φi+1
C
D
O
2MOD i
CDOC
HMDH
2tan i
Y21
Y
X21
X
Y
X
sinl21
Y
cosl21
Xtan
i
i
i
i
sin cos 45cos45sin
FAcosLX 'Y
21
Y
'X)'X21
X('Y
i
i
'
i
i
tan
l42
Y
l42
Xtan
'i1i XXX
'i1i YYY
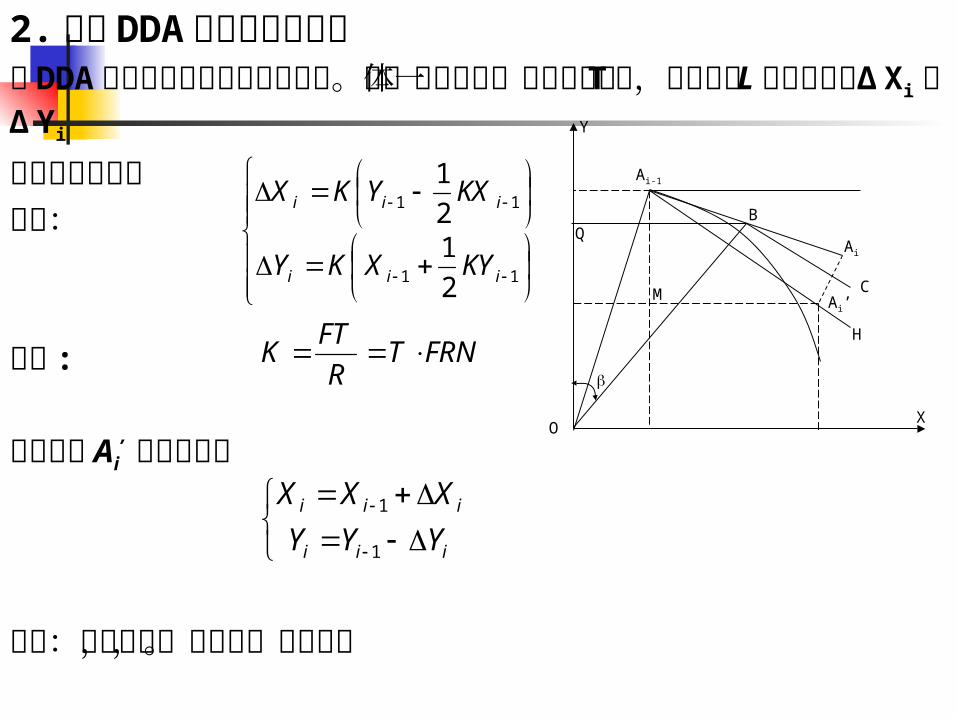
2.扩展DDA法数据采样插补 将 DDA的切向逼近改变为割线逼近。具体还是计算一个插补周期 T内,轮廓步长 L的坐标分量∆Xi 和∆ Yi由右图经过推导可得:
其中 :
新加工点 Ai’ 的坐标位置
特点:计算简单,速度快,精度高。
11
11
2
12
1
iii
iii
KYXKY
KXYKX
iii
iii
YYY
XXX
1
1
FRNTR
FTK
B
Ai’C
X
Y
M
H
Q
O
Ai
Ai-1