Embed Size (px)
Citation preview
目 录
实验一 典型环节的阶跃响应测试 1
实验二 二阶系统瞬态响应和稳定性测试 7
实验三 二阶系统的校正装置的设计 12
实验四 控制系统的频率特性测试 15
实验五 典型非线性环节的特性 18
实验六 非线性环节的相平面分析法 22
实验七 非线性环节的描述函数分析法 27
实验八 状态变量反馈系统的设计 31
实验九 温度闭环控制实验 34
实验十 步进电机调速实验 36
实验十一 直流电机闭环调速实验 38
实验十二 随动系统的 PID 控制 41
实验一 典型环节的阶跃响应测试
一. 实验目的要求
了解和掌握各典型环节的传递函数及模拟电路图,观察和分析各典型环节的响应曲线。
二.实验设备 自动控制原理实验箱、联想计算机、万用表
三.实验步骤与内容
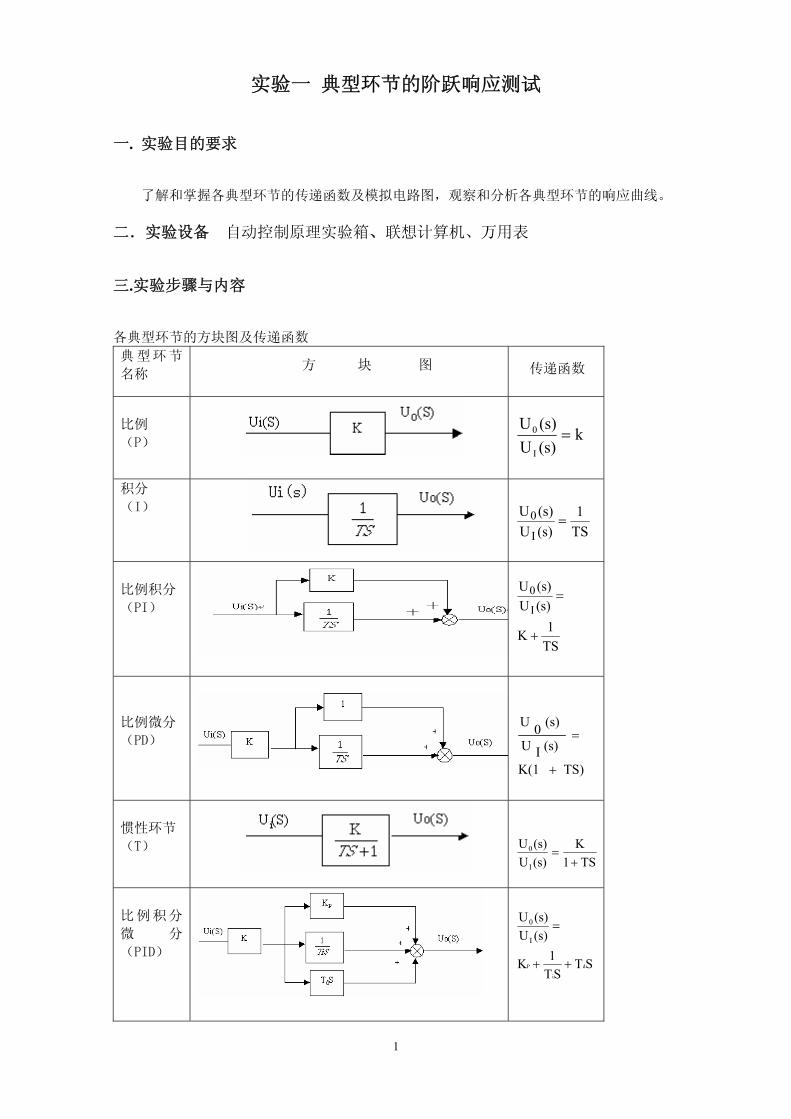
各典型环节的方块图及传递函数 典型环节
名称
方 块 图 传递函数
比例
(P)
k(s)U(s)U
I
0 =
积分
(I)
TS1
(s)U(s)U
I
0 =
比例积分
(PI)
TS1K
(s)U(s)U
I
0
+
=
比例微分
(PD)
TS)K(1
(s)IU
(s)0U
+
=
惯性环节
(T)
TS1K
(s)U(s)U
I
0
+=
比例积分
微 分
(PID)
STST
1K
(s)U(s)U
d
i
P
I
0
++
=
1
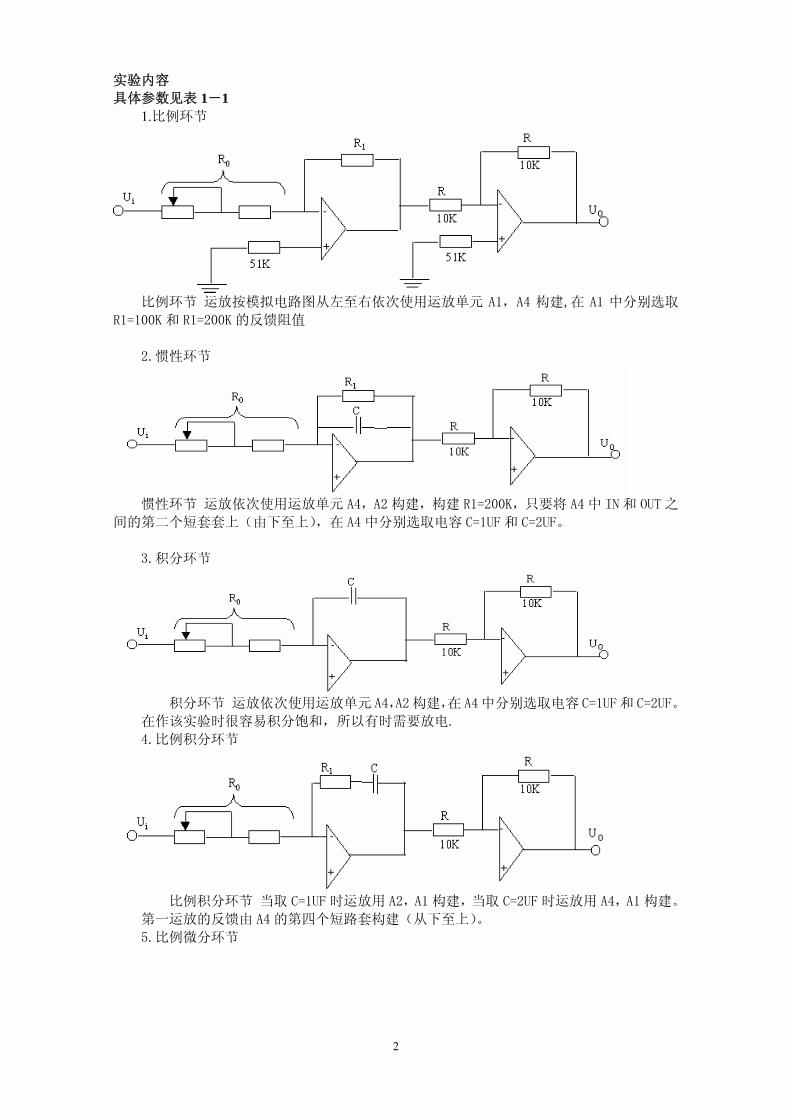
实验内容 具体参数见表 1-1
1.比例环节
比例环节 运放按模拟电路图从左至右依次使用运放单元 A1,A4 构建,在 A1 中分别选取
R1=100K 和 R1=200K 的反馈阻值
2.惯性环节
惯性环节 运放依次使用运放单元 A4,A2 构建,构建 R1=200K,只要将 A4 中 IN 和 OUT 之
间的第二个短套套上(由下至上),在 A4 中分别选取电容 C=1UF 和 C=2UF。
3.积分环节
积分环节 运放依次使用运放单元A4,A2构建,在A4中分别选取电容C=1UF和 C=2UF。
在作该实验时很容易积分饱和,所以有时需要放电.
4.比例积分环节
比例积分环节 当取 C=1UF 时运放用 A2,A1 构建,当取 C=2UF 时运放用 A4,A1 构建。
第一运放的反馈由 A4 的第四个短路套构建(从下至上)。
5.比例微分环节
2
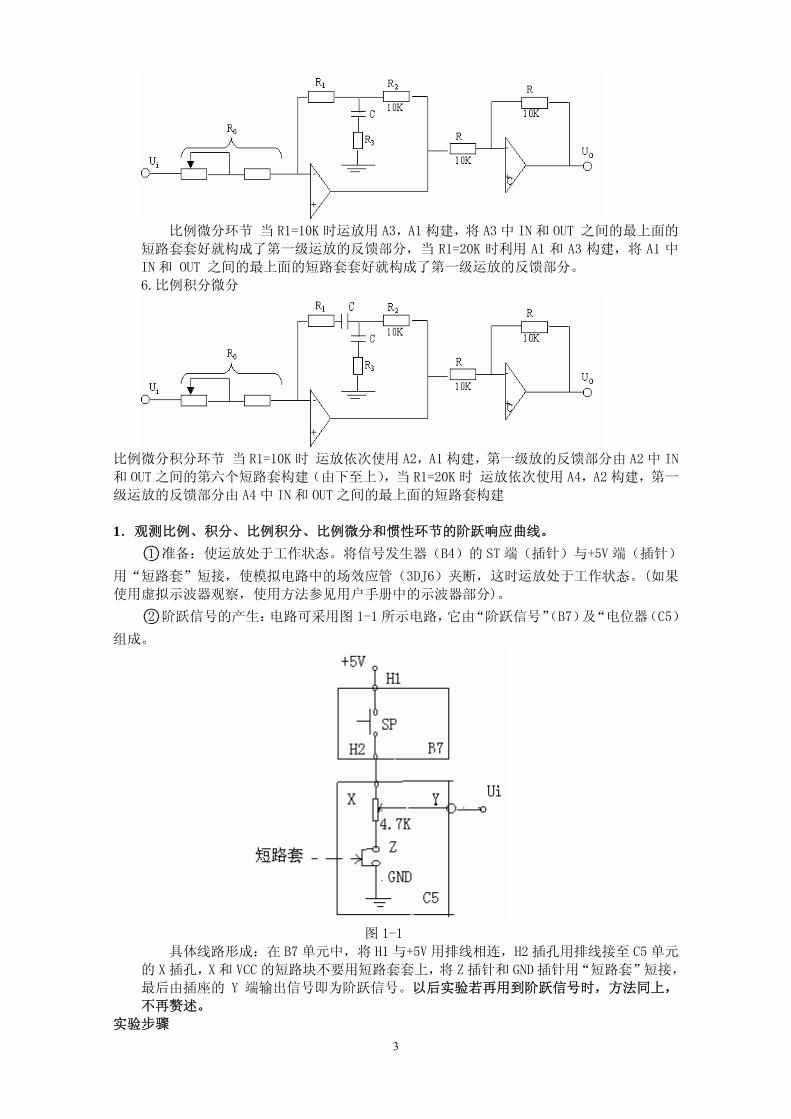
比例微分环节 当 R1=10K 时运放用 A3,A1 构建,将 A3 中 IN 和 OUT 之间的 上面的
短路套套好就构成了第一级运放的反馈部分,当 R1=20K 时利用 A1 和 A3 构建,将 A1 中
IN 和 OUT 之间的 上面的短路套套好就构成了第一级运放的反馈部分。
6.比例积分微分
比例微分积分环节 当 R1=10K 时 运放依次使用 A2,A1 构建,第一级放的反馈部分由 A2 中 IN
和 OUT 之间的第六个短路套构建(由下至上),当 R1=20K 时 运放依次使用 A4,A2 构建,第一
级运放的反馈部分由 A4 中 IN 和 OUT 之间的 上面的短路套构建
1.观测比例、积分、比例积分、比例微分和惯性环节的阶跃响应曲线。
1 准备:使运放处于工作状态。将信号发生器(B4)的 ST 端(插针)与+5V 端(插针)
用“短路套”短接,使模拟电路中的场效应管(3DJ6)夹断,这时运放处于工作状态。(如果
使用虚拟示波器观察,使用方法参见用户手册中的示波器部分)。
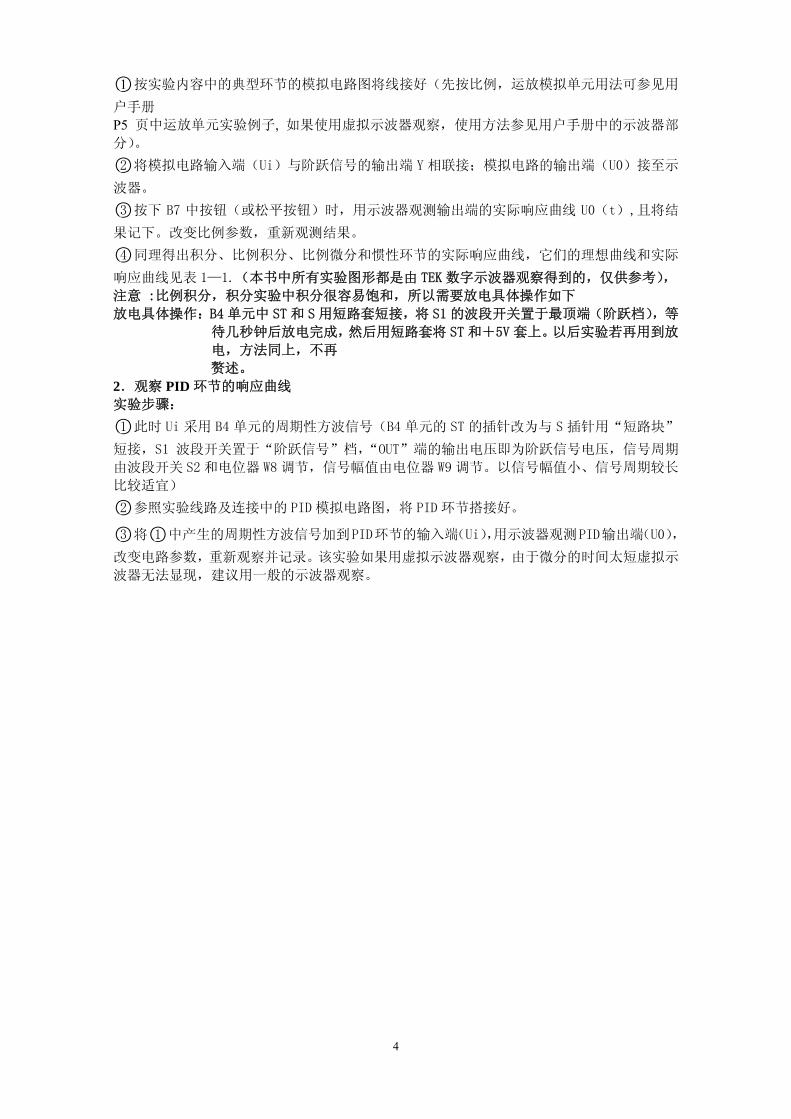
2 阶跃信号的产生:电路可采用图 1-1 所示电路,它由“阶跃信号”(B7)及“电位器(C5)
组成。
图 1-1
具体线路形成:在 B7 单元中,将 H1 与+5V 用排线相连,H2 插孔用排线接至 C5 单元
的 X 插孔,X和 VCC 的短路块不要用短路套套上,将 Z 插针和 GND 插针用“短路套”短接,
后由插座的 Y 端输出信号即为阶跃信号。以后实验若再用到阶跃信号时,方法同上,
不再赘述。
实验步骤
3
4
1 按实验内容中的典型环节的模拟电路图将线接好(先按比例,运放模拟单元用法可参见用
户手册 P5 页中运放单元实验例子, 如果使用虚拟示波器观察,使用方法参见用户手册中的示波器部
分)。
2 将模拟电路输入端(Ui)与阶跃信号的输出端 Y 相联接;模拟电路的输出端(U0)接至示
波器。
3 按下 B7 中按钮(或松平按钮)时,用示波器观测输出端的实际响应曲线 U0(t),且将结
果记下。改变比例参数,重新观测结果。
4 同理得出积分、比例积分、比例微分和惯性环节的实际响应曲线,它们的理想曲线和实际
响应曲线见表 1—1.(本书中所有实验图形都是由 TEK 数字示波器观察得到的,仅供参考),
注意 :比例积分,积分实验中积分很容易饱和,所以需要放电具体操作如下
放电具体操作:B4 单元中 ST 和 S 用短路套短接,将 S1 的波段开关置于 顶端(阶跃档),等
待几秒钟后放电完成,然后用短路套将 ST 和+5V 套上。以后实验若再用到放
电,方法同上,不再
赘述。
2.观察 PID 环节的响应曲线 实验步骤:
1 此时 Ui 采用 B4 单元的周期性方波信号(B4 单元的 ST 的插针改为与 S 插针用“短路块”
短接,S1 波段开关置于“阶跃信号”档,“OUT”端的输出电压即为阶跃信号电压,信号周期
由波段开关 S2 和电位器 W8 调节,信号幅值由电位器 W9 调节。以信号幅值小、信号周期较长
比较适宜)
2 参照实验线路及连接中的 PID 模拟电路图,将 PID 环节搭接好。
3 将1 中产生的周期性方波信号加到PID环节的输入端(Ui),用示波器观测PID输出端(U0),
改变电路参数,重新观察并记录。该实验如果用虚拟示波器观察,由于微分的时间太短虚拟示
波器无法显现,建议用一般的示波器观察。
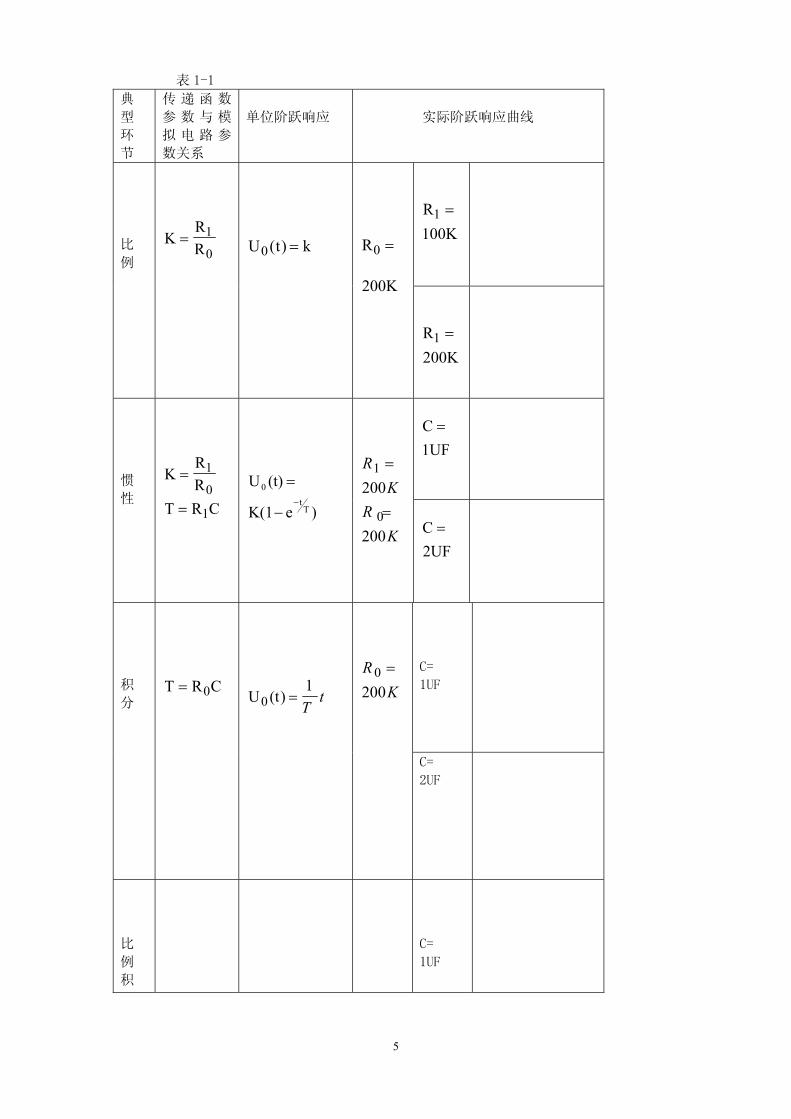
表 1-1
典
型
环
节
传 递 函 数
参 数 与 模
拟 电 路 参
数关系
单位阶跃响应
实际阶跃响应曲线
100KR1 =
比
例
0
1RR
K =
k)t(U0 =
200K
R0 =
200KR1 =
1UFC =
惯
性
0
1RR
K =
CRT 1=
)eK(1
(t)U
Tt
0−
−
=
KRK
R
200
200
0
1
=
=
2UFC =
C=
1UF
积
分
CRT 0=
tT1
)(tU0 =
KR200
0 =
C=
2UF
比
例
积
C=
1UF
5
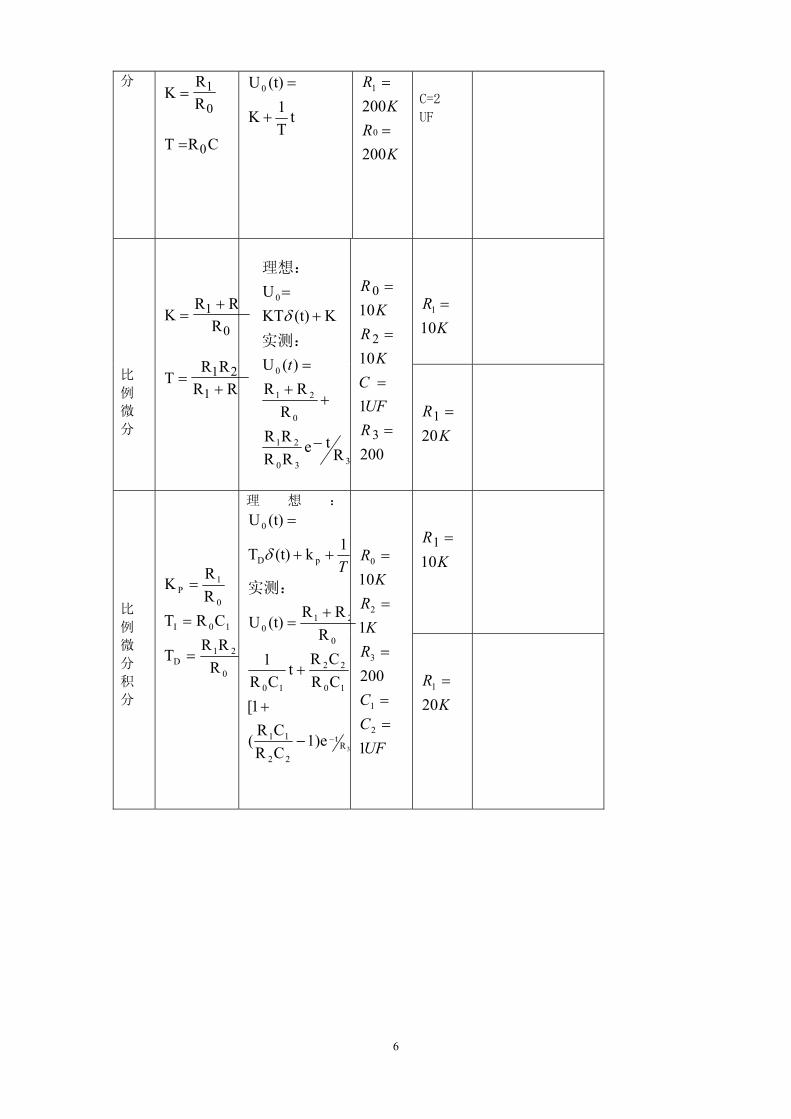
分
CRT
RR
K
0
0
1
=
= t
T1K
(t)U0
+
=
KRK
R
200
2000
1
=
=
C=2
UF
KR10
1 =
比
例
微
分
6
1
21
0
1
RRRR
T
RRR
K
+=
+=
Rte
RRRRR
RR)(U
K(t)KTU
330
21
0
21
0
0
−
++
=
+=
t实测:
理想:
δ
200
1
10
10
3
2
0
=
=
=
=
RUFCK
RK
R
KR20
1 =
KR10
1 =
比
例
微
分
积
分
0
21D
10I
0
1P
RRR
T
CRTRRK
=
=
=
理 想 :
1)eCRCR(
1[CRCRt
CR1
RRR(t)U
1k(t)T
(t)U
3Rt
22
11
10
22
10
0
10
pD
0
−−
+
+
+=
++
=
实测:
Tδ
2
UFCC
RKRK
R
1
200
1
10
2
1
3
2
0
==
=
=
=
KR20
1 =
实验二 二阶系统瞬态响应和稳定性测试
一. 实验目的要求
了解和掌握典型二阶和三阶系统的传递函数和模拟电路图。观察和分析典型二阶系统在欠
阻尼,临界阻尼,过阻尼的响应曲线及典型三阶系统在发散,等幅振荡,衰减振荡的响应曲线,
二.实验设备 自动控制原理实验箱、联想计算机、万用表
三.实验内容及步骤
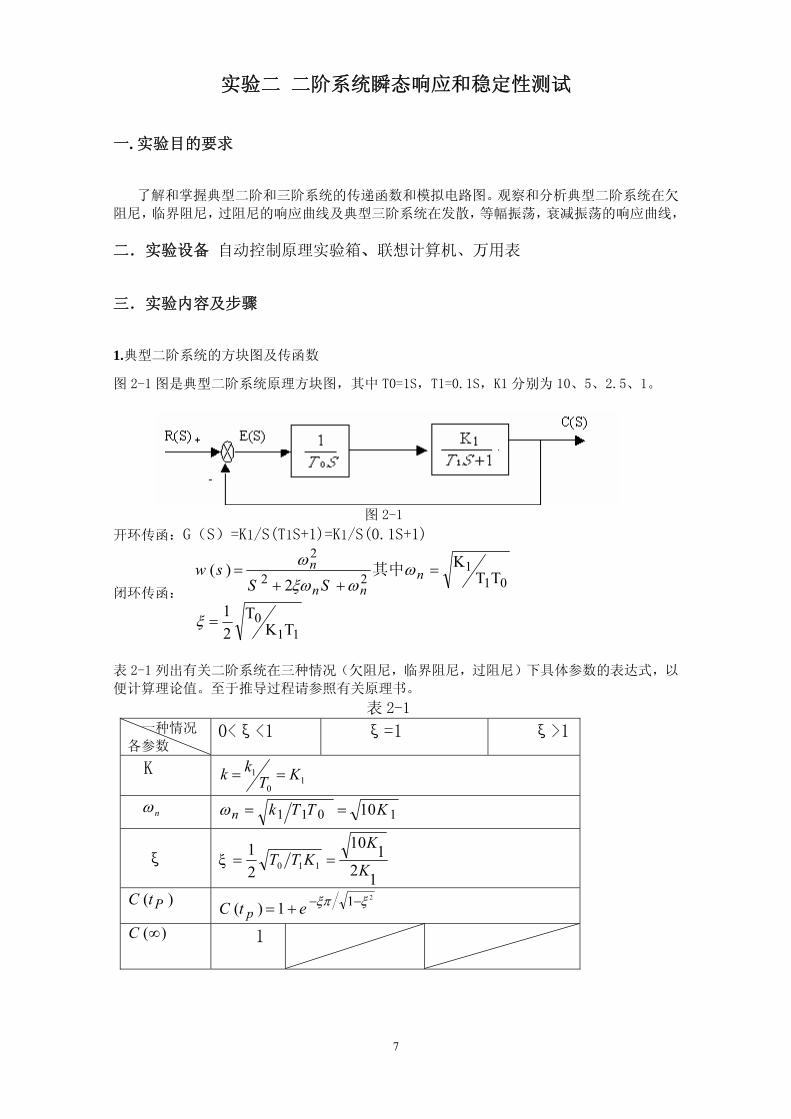
1.典型二阶系统的方块图及传函数
图 2-1 图是典型二阶系统原理方块图,其中 T0=1S,T1=0.1S,K1 分别为 10、5、2.5、1。
图 2-1
开环传函:G(S)=K1/S(T1S+1)=K1/S(0.1S+1)
闭环传函:
110
011
22
2
TKT
21
TTK
2)(
=
=++
=
ξ
ωωξω
ωn
nn
nSS
sw 其中
表 2-1 列出有关二阶系统在三种情况(欠阻尼,临界阻尼,过阻尼)下具体参数的表达式,以
便计算理论值。至于推导过程请参照有关原理书。
表 2-1 一种情况
各参数 0<ξ<1 ξ=1 ξ>1
K 1
0
1 KTkk ==
nω 1011 10KTTkn ==ω
ξ 12110
21ξ 110 K
KKTT ==
)( PtC 211)( ξξπ −−+= etC p
)(∞C
1
7
一种情况
各参数
0<ξ<1
ξ=1 ξ>1
(%)PM
8
21 ξξπ −−= eM P
)(st p
21 ξω
π
−=
npt
)(st s
nst
ξω4
=
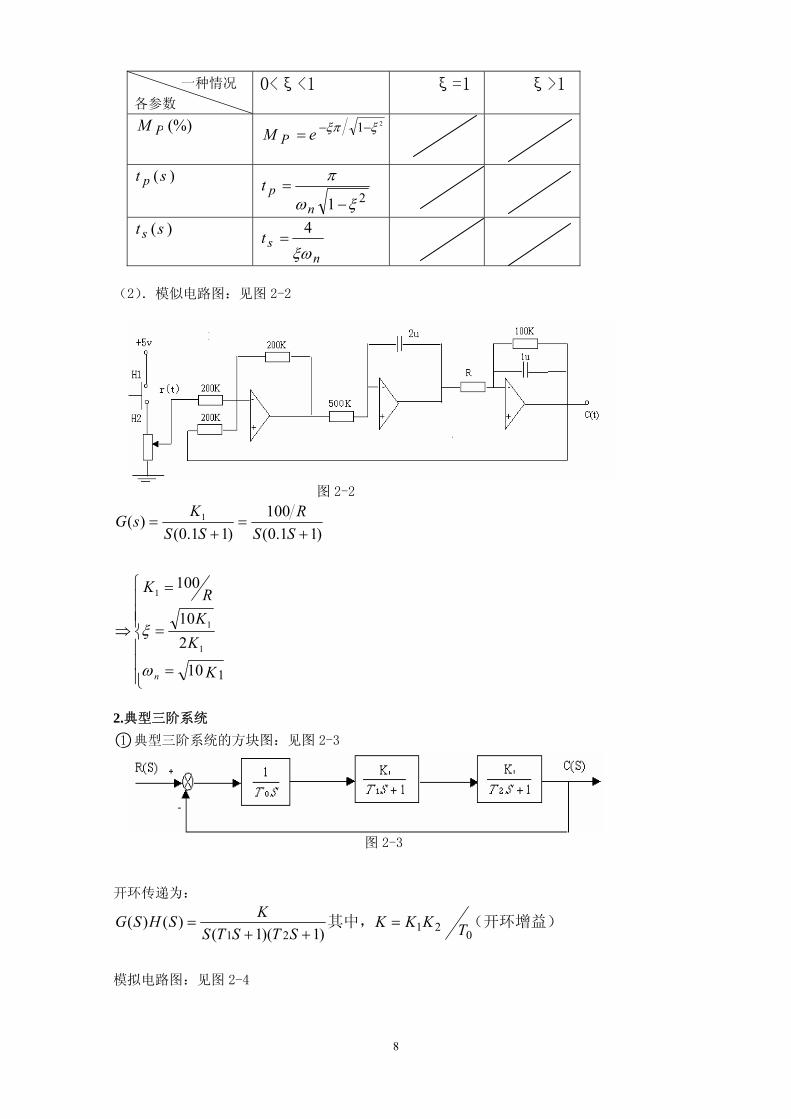
(2).模似电路图:见图 2-2
图 2-2
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
=
=
=
⇒
+=
+=
K
KKRK
SSR
SSKsG
n 110
210
100
)11.0(100
)11.0()(
1
1
1
1
ω
ξ
2.典型三阶系统
1 典型三阶系统的方块图:见图 2-3
图 2-3
开环传递为:
(开环增益)其中,0
2121 )1)(1(
)()( TKKKSTSTS
KSHSG =++
=
模拟电路图:见图 2-4
(1)典型二阶系统瞬态性能指标的测试
3 分别按 R=10K;40K;100K(在 A3 运放单元中改边 R 的值)改变系统开环增益,观察相
应的阶跃响应 C(t),测量并记录性能指标 Mp、ts 及系统的稳定性。并将测量值和计算值(实
验前必须按公式计算出)进行比较。参数取值及响应曲线,详见下表。
2 用示波器观察系统阶跃响应 C(t),测量并记录超调量 MP,峰值时间 tp 和调节时间 ts。
记录表 2 中。
1 按图 2-2 接线,r(t)输入为阶跃信号搭建方法见 P4 页图 1-1,R=10K, 按模拟电路图由
左至右依次使用 A2,A4,A3,运放单元构建,第一级运放的反馈电阻由 A2 中 IN 与 OUT 之间
的第三个短路套构建(由下至上),剩余的 200K 反馈电阻由 A5 中的 W2 或 W4 来构建(注意在
实验过程中不允许调节此电位器).
9
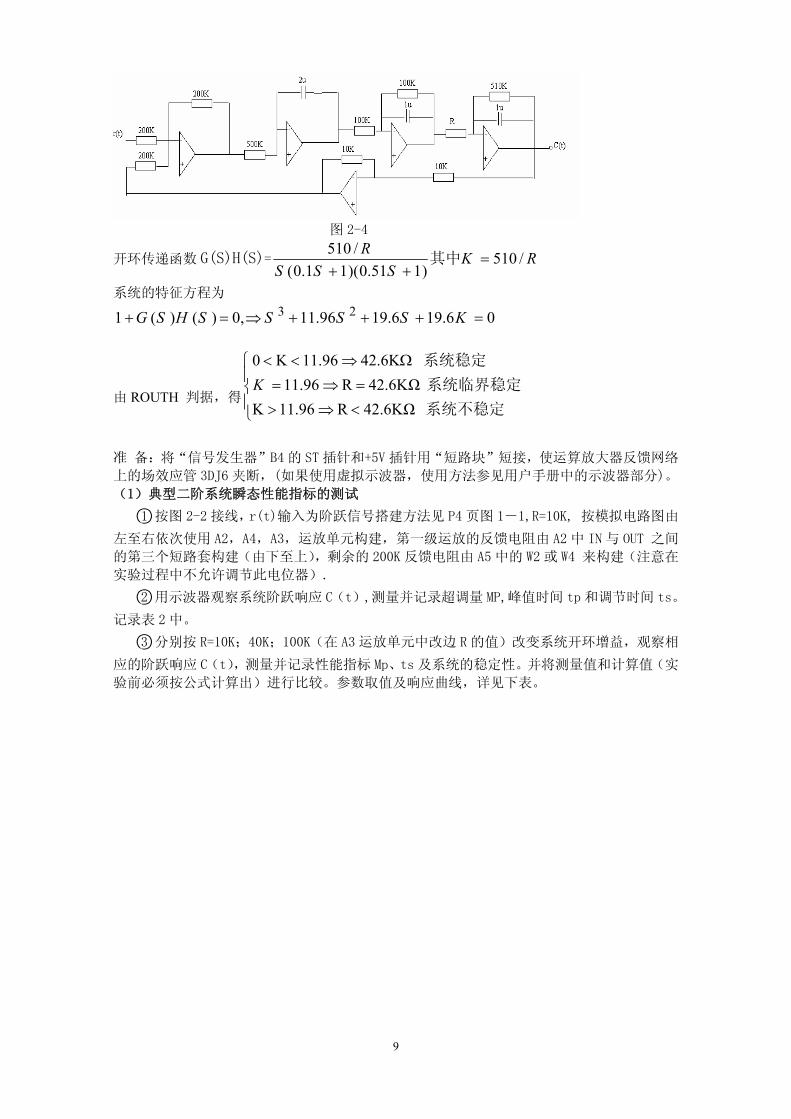
图 2-4
开环传递函数 G(S)H(S)= RKSSS
R /510)151.0)(11.0(
/510=
++其中
06.196.1996.11,0)()(1 23 =+++⇒=+ KSSSSHSG
⎪⎩
⎪⎨
⎧
<⇒>
=⇒=
Ω⇒<<
系统不稳定
系统临界稳定
系统稳定
42.6KΩR11.96K 42.6KΩR11.96 42.6K11.96K0
K
系统的特征方程为
准 备:将“信号发生器”B4 的 ST 插针和+5V 插针用“短路块”短接,使运算放大器反馈网络
上的场效应管 3DJ6 夹断,(如果使用虚拟示波器,使用方法参见用户手册中的示波器部分)。
由 ROUTH 判据,得
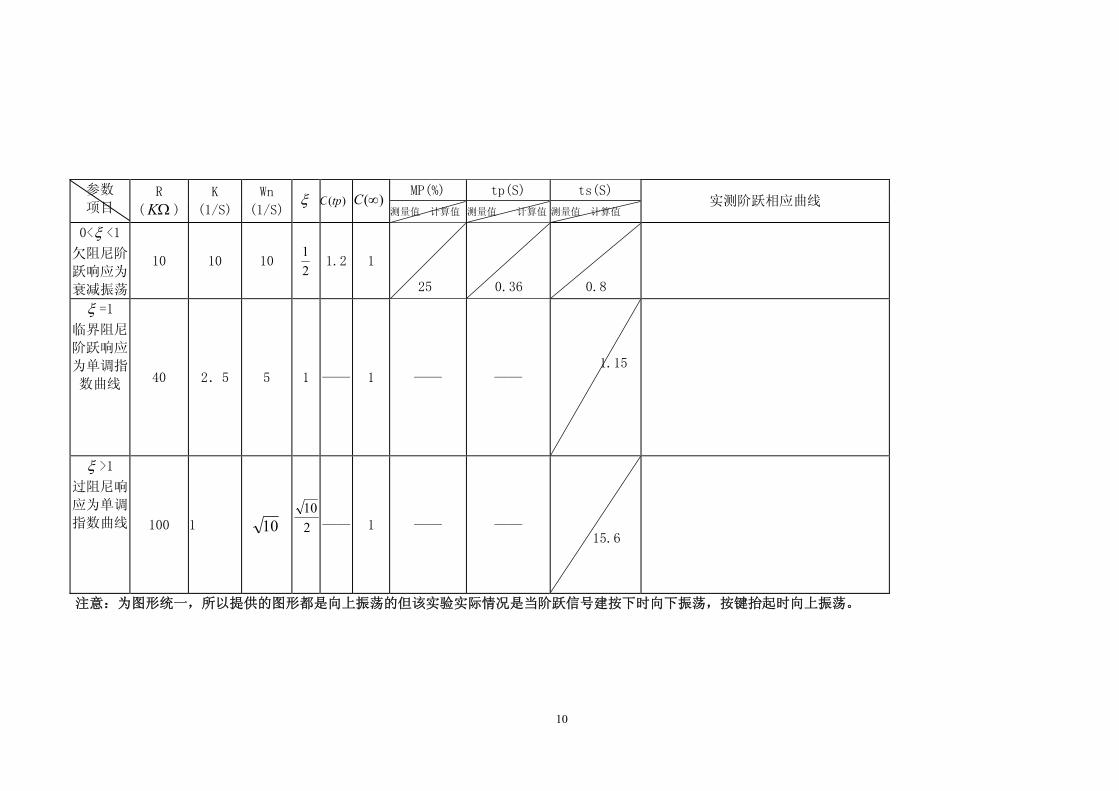
MP(%) tp(S) ts(S) 参数
项目 R
Ω(K )
K
(1/S)
Wn
(1/S) ξ
10
)(tpC )(∞C测量值 计算值 测量值 计算值 测量值 计算值
实测阶跃相应曲线
0<ξ <1
欠阻尼阶
跃响应为
衰减振荡
10 10 10 21 1.2 1
25
0.36
0.8
ξ =1
临界阻尼
阶跃响应
为单调指
数曲线 40 2.5 5 1 —— 1 —— ——
1.15
ξ >1
过阻尼响
应为单调
指数曲线 100 1 10 210
—— 1 —— ——
15.6
注意:为图形统一,所以提供的图形都是向上振荡的但该实验实际情况是当阶跃信号建按下时向下振荡,按键抬起时向上振荡。
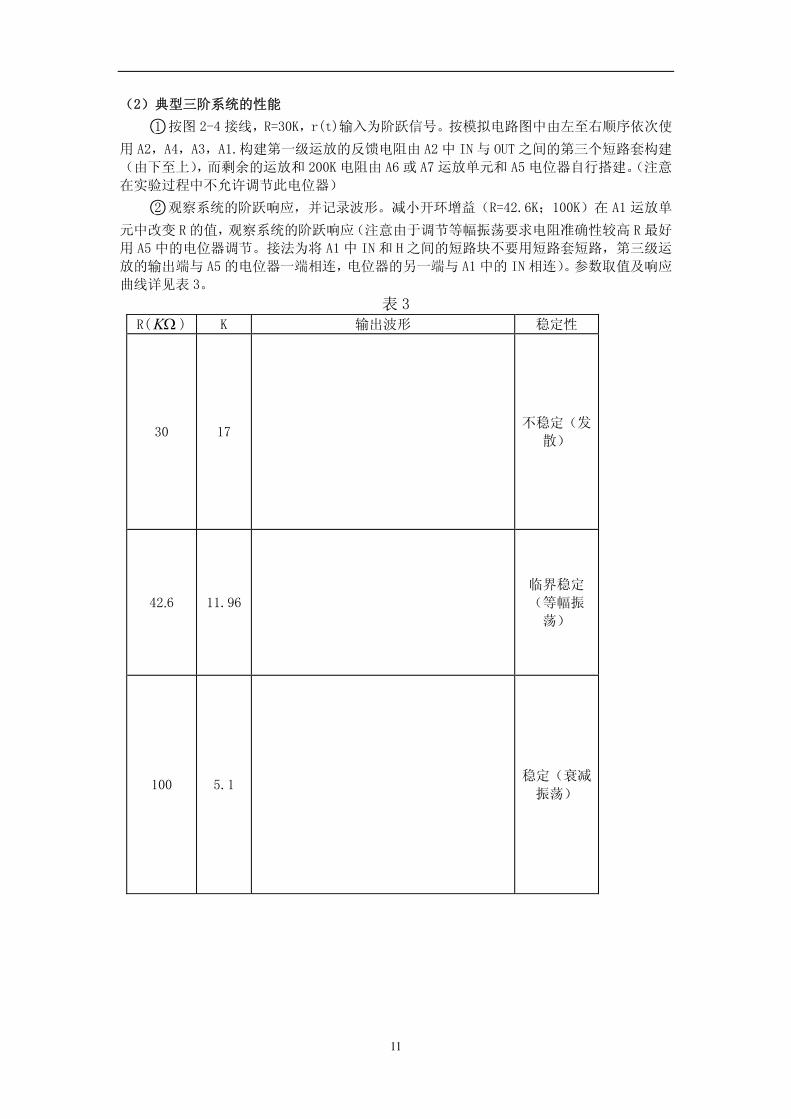
(2)典型三阶系统的性能
1 按图 2-4 接线,R=30K,r(t)输入为阶跃信号。按模拟电路图中由左至右顺序依次使
用 A2,A4,A3,A1.构建第一级运放的反馈电阻由 A2 中 IN 与 OUT 之间的第三个短路套构建
(由下至上),而剩余的运放和 200K 电阻由 A6 或 A7 运放单元和 A5 电位器自行搭建。(注意
在实验过程中不允许调节此电位器)
2 观察系统的阶跃响应,并记录波形。减小开环增益(R=42.6K;100K)在 A1 运放单
元中改变 R的值,观察系统的阶跃响应(注意由于调节等幅振荡要求电阻准确性较高 R 好
用 A5 中的电位器调节。接法为将 A1 中 IN 和 H 之间的短路块不要用短路套短路,第三级运
放的输出端与 A5 的电位器一端相连,电位器的另一端与 A1 中的 IN 相连)。参数取值及响应
曲线详见表 3。 表 3
R( ΩK ) K 输出波形 稳定性
不稳定(发
散) 30 17
42.6 11.96
临界稳定
(等幅振
荡)
100 5.1
稳定(衰减
振荡)
11
实验三 二阶系统校正装置的设计
一. 实验目的要求
解和掌握校正的理论和意义,观察和分析校正系统和非校正系统的响应曲线。
二. 实验设备 自动控制原理实验箱、联想计算机、万用表
三.实验内容及步骤
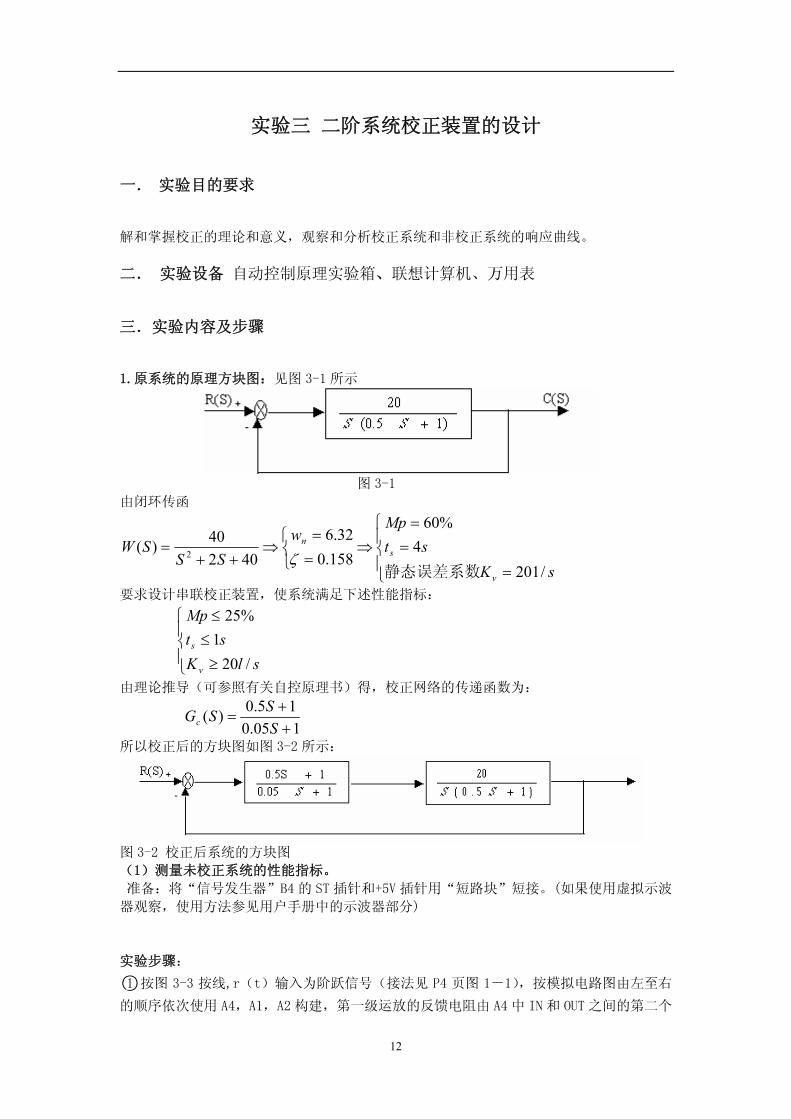
1.原系统的原理方块图:见图 3-1 所示
图 3-1
由闭环传函
⎪⎩
⎪⎨
⎧
=
==
⇒⎩⎨⎧
==
⇒++
=
sKst
Mpw
SSSW
v
sn
/2014
%60
158.032.6
40240)( 2
静态误差系数ζ
要求设计串联校正装置,使系统满足下述性能指标:
⎪⎩
⎪⎨
⎧
≥≤≤
slKst
Mp
v
s
/201
%25
由理论推导(可参照有关自控原理书)得,校正网络的传递函数为:
105.0
15.0)(++
=SSSGc
所以校正后的方块图如图 3-2 所示:
图 3-2 校正后系统的方块图
(1)测量未校正系统的性能指标。
准备:将“信号发生器”B4 的 ST 插针和+5V 插针用“短路块”短接。(如果使用虚拟示波
器观察,使用方法参见用户手册中的示波器部分)
实验步骤:
1 按图 3-3 按线,r(t)输入为阶跃信号(接法见 P4 页图 1-1),按模拟电路图由左至右
的顺序依次使用 A4,A1,A2 构建,第一级运放的反馈电阻由 A4 中 IN 和 OUT 之间的第二个
12
短路套构建(由下至上), 后剩的 200K 电阻由 A5 单元中的电位器来搭(注意在实验过程
中不允许调节此电位器)
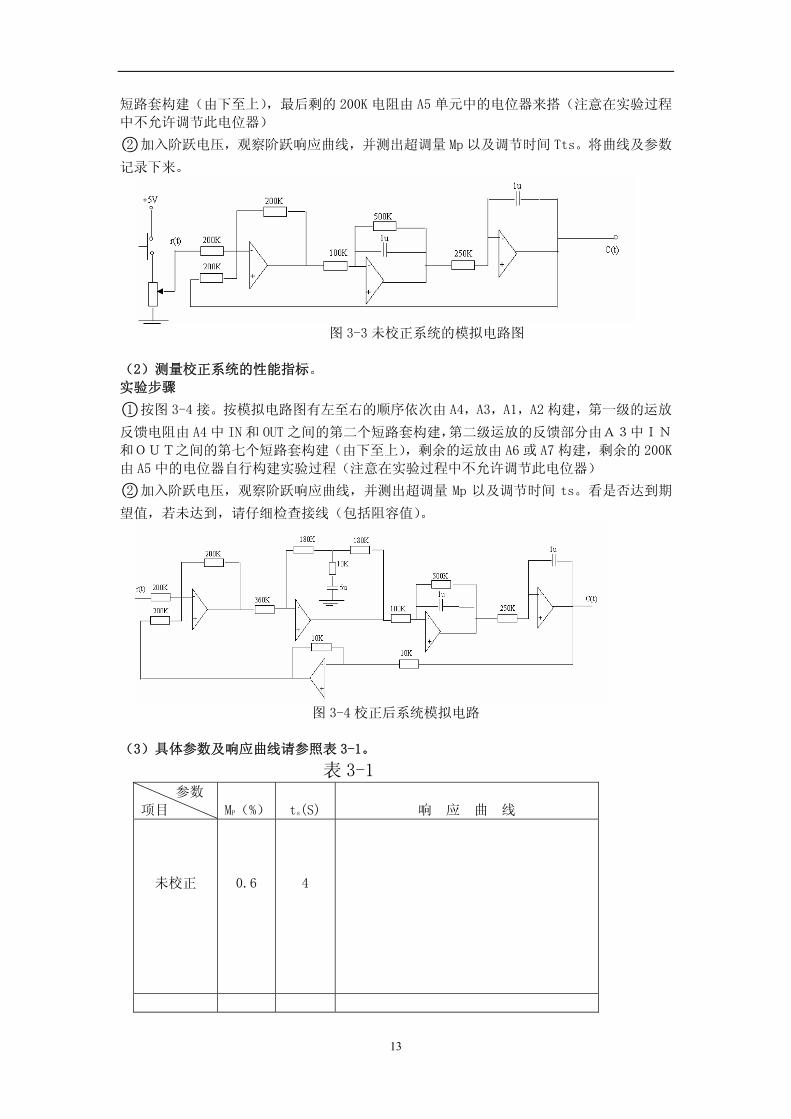
2 加入阶跃电压,观察阶跃响应曲线,并测出超调量 Mp 以及调节时间 Tts。将曲线及参数
记录下来。
图 3-3 未校正系统的模拟电路图
(2)测量校正系统的性能指标。
实验步骤
1 按图 3-4 接。按模拟电路图有左至右的顺序依次由 A4,A3,A1,A2 构建,第一级的运放
反馈电阻由 A4 中 IN 和 OUT 之间的第二个短路套构建,第二级运放的反馈部分由A3中IN
和OUT之间的第七个短路套构建(由下至上),剩余的运放由 A6 或 A7 构建,剩余的 200K
由 A5 中的电位器自行构建实验过程(注意在实验过程中不允许调节此电位器)
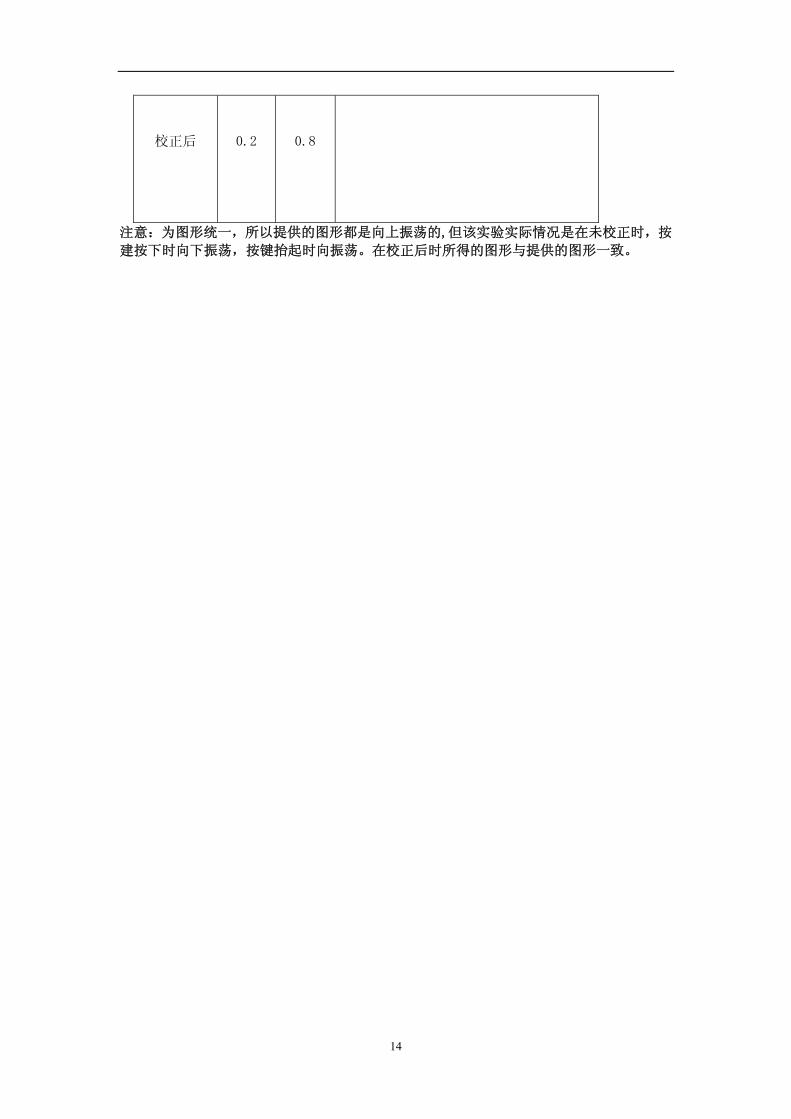
2 加入阶跃电压,观察阶跃响应曲线,并测出超调量 Mp 以及调节时间 ts。看是否达到期
望值,若未达到,请仔细检查接线(包括阻容值)。
图 3-4 校正后系统模拟电路
(3)具体参数及响应曲线请参照表 3-1。 表 3-1
参数
项目
MP(%)
ts(S)
响 应 曲 线
未校正
0.6
4
13
校正后
0.2
0.8
注意:为图形统一,所以提供的图形都是向上振荡的,但该实验实际情况是在未校正时,按
建按下时向下振荡,按键抬起时向振荡。在校正后时所得的图形与提供的图形一致。
14
实验四 控制系统的频率特性测试
一. 实验目的要求
了解和掌握控制系统的频率特性,学会测量开环对数幅频曲线和相频曲线。
二. 实验设备 自动控制原理实验箱、联想计算机、万用表
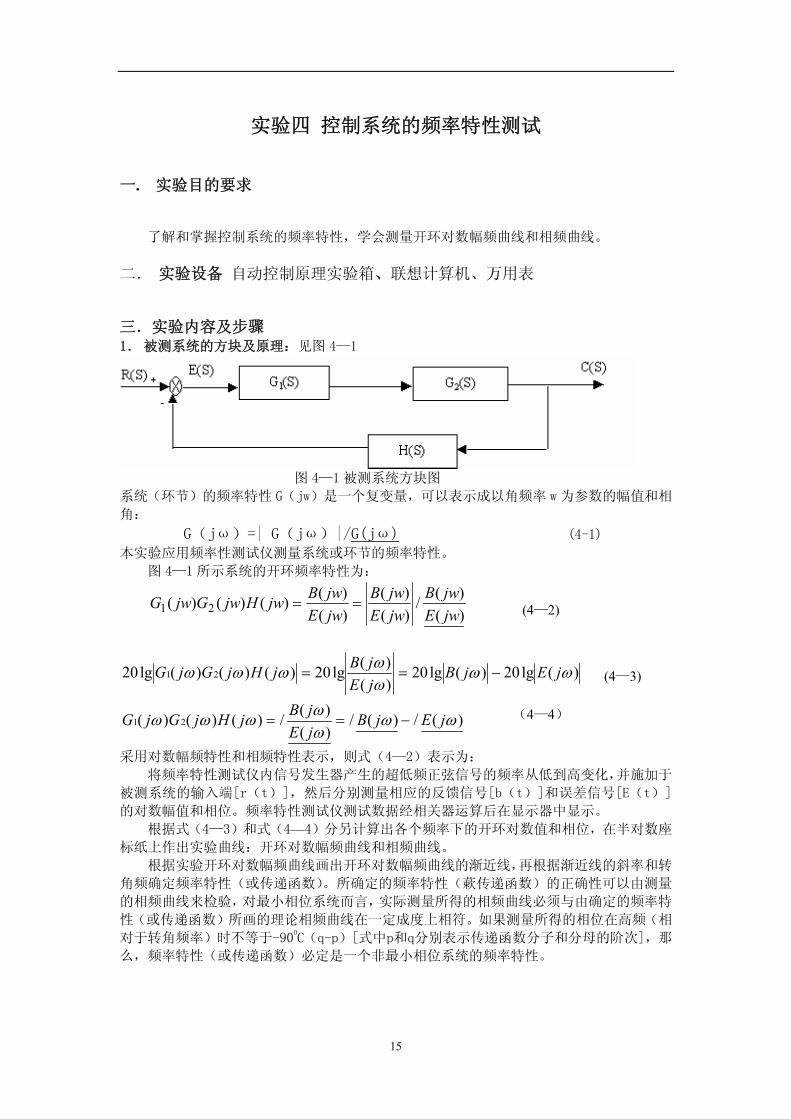
三.实验内容及步骤 1. 被测系统的方块及原理:见图 4—1
图 4—1 被测系统方块图
系统(环节)的频率特性 G(jw)是一个复变量,可以表示成以角频率 w 为参数的幅值和相
角: G(jω)=| G(jω)|/G(jω) (4-1)
本实验应用频率性测试仪测量系统或环节的频率特性。
图 4—1 所示系统的开环频率特性为:
)()(/
)()(
)()()()()( 21 jwE
jwBjwEjwB
jwEjwBjwHjwGjwG == (4—2)
)(/)(/)()(/)()()(
)(lg20)(lg20)()(lg20)()()(lg20
21
21
ωωωωωωω
ωωωωωωω
jEjBjEjBjHjGjG
jEjBjEjBjHjGjG
−==
−==
(4—4)
(4—3)
采用对数幅频特性和相频特性表示,则式(4—2)表示为:
将频率特性测试仪内信号发生器产生的超低频正弦信号的频率从低到高变化,并施加于
被测系统的输入端[r(t)],然后分别测量相应的反馈信号[b(t)]和误差信号[E(t)]
的对数幅值和相位。频率特性测试仪测试数据经相关器运算后在显示器中显示。
根据式(4—3)和式(4—4)分另计算出各个频率下的开环对数值和相位,在半对数座
标纸上作出实验曲线:开环对数幅频曲线和相频曲线。
根据实验开环对数幅频曲线画出开环对数幅频曲线的渐近线,再根据渐近线的斜率和转
角频确定频率特性(或传递函数)。所确定的频率特性(蔌传递函数)的正确性可以由测量
的相频曲线来检验,对 小相位系统而言,实际测量所得的相频曲线必须与由确定的频率特
性(或传递函数)所画的理论相频曲线在一定成度上相符。如果测量所得的相位在高频(相
对于转角频率)时不等于-900C(q-p)[式中p和q分别表示传递函数分子和分母的阶次],那
么,频率特性(或传递函数)必定是一个非 小相位系统的频率特性。
15
1.测量系统的开环对数幅频曲线和相频曲线。
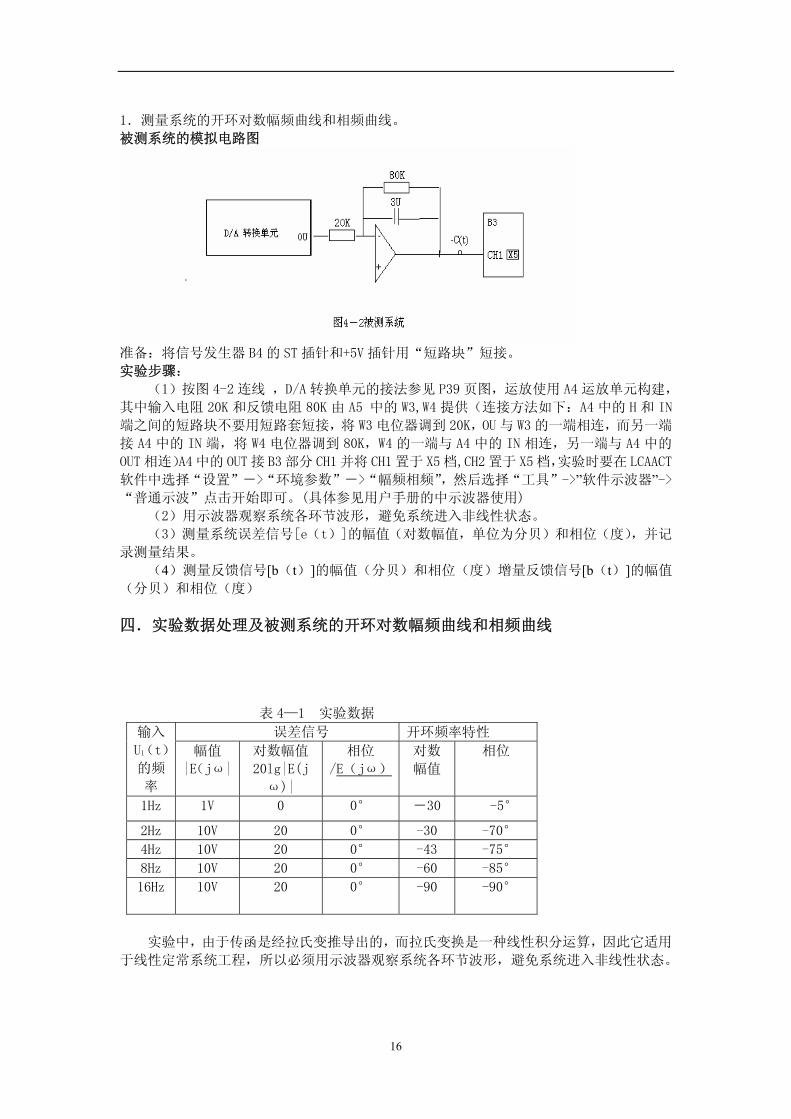
被测系统的模拟电路图
准备:将信号发生器 B4 的 ST 插针和+5V 插针用“短路块”短接。
实验步骤:
(1)按图 4-2 连线 ,D/A 转换单元的接法参见 P39 页图,运放使用 A4 运放单元构建,
其中输入电阻 20K 和反馈电阻 80K 由 A5 中的 W3,W4 提供(连接方法如下:A4 中的 H 和 IN
端之间的短路块不要用短路套短接,将 W3 电位器调到 20K,OU 与 W3 的一端相连,而另一端
接 A4 中的 IN 端,将 W4 电位器调到 80K,W4 的一端与 A4 中的 IN 相连,另一端与 A4 中的
OUT相连)A4中的 OUT接 B3部分 CH1并将 CH1置于 X5档,CH2置于 X5档,实验时要在LCAACT
软件中选择“设置”->“环境参数”->“幅频相频”,然后选择“工具”->”软件示波器”->“普通示波”点击开始即可。(具体参见用户手册的中示波器使用)
(2)用示波器观察系统各环节波形,避免系统进入非线性状态。
(3)测量系统误差信号[e(t)]的幅值(对数幅值,单位为分贝)和相位(度),并记
录测量结果。
(4)测量反馈信号[b(t)]的幅值(分贝)和相位(度)增量反馈信号[b(t)]的幅值
(分贝)和相位(度)
四.实验数据处理及被测系统的开环对数幅频曲线和相频曲线
表 4—1 实验数据
误差信号 开环频率特性 输入
U1(t)
的频
率
幅值
|E(jω|
对数幅值
20lg|E(j
ω)|
相位
/E(jω)
对数
幅值
相位
1Hz 1V 0 0° -30 -5°
2Hz 10V 20 0° -30 -70°
4Hz 10V 20 0° -43 -75°
8Hz 10V 20 0° -60 -85°
16Hz 10V 20 0° -90 -90°
实验中,由于传函是经拉氏变推导出的,而拉氏变换是一种线性积分运算,因此它适用
于线性定常系统工程,所以必须用示波器观察系统各环节波形,避免系统进入非线性状态。
16

根据曲线,求出系统的传函:124.0
41
)(+
=+
=STS
KSG
其中
⎪⎩
⎪⎨⎧
>==
=
hzWT
dbk
66.0ff28.6112lg20
==系统开环传函为
124.04)(+
=S
SG 实验中,由于系统积分饱和,所以实验的结果与理论上稍有偏差,
如果想得到理想的效果可以用 B9 部分的正弦波做为信号源,调节调频调幅旋钮来产生不同
频率的正弦波,然后用示波器比较输出和输入信号的幅度和相位的差异,绘出幅频相频曲线。
17
实验五 典型非线性环节的特性
一.实验要求
了解和掌握典型非线性环节的原理,观察和分析典型非线性环节的输出特性。
二.实验原理
实验以运算放大器为基本元件,在输入端和反馈网络中设置相应元件(稳压管、二极管、
电阻的电容)组成各种典型非线性的模拟电路。
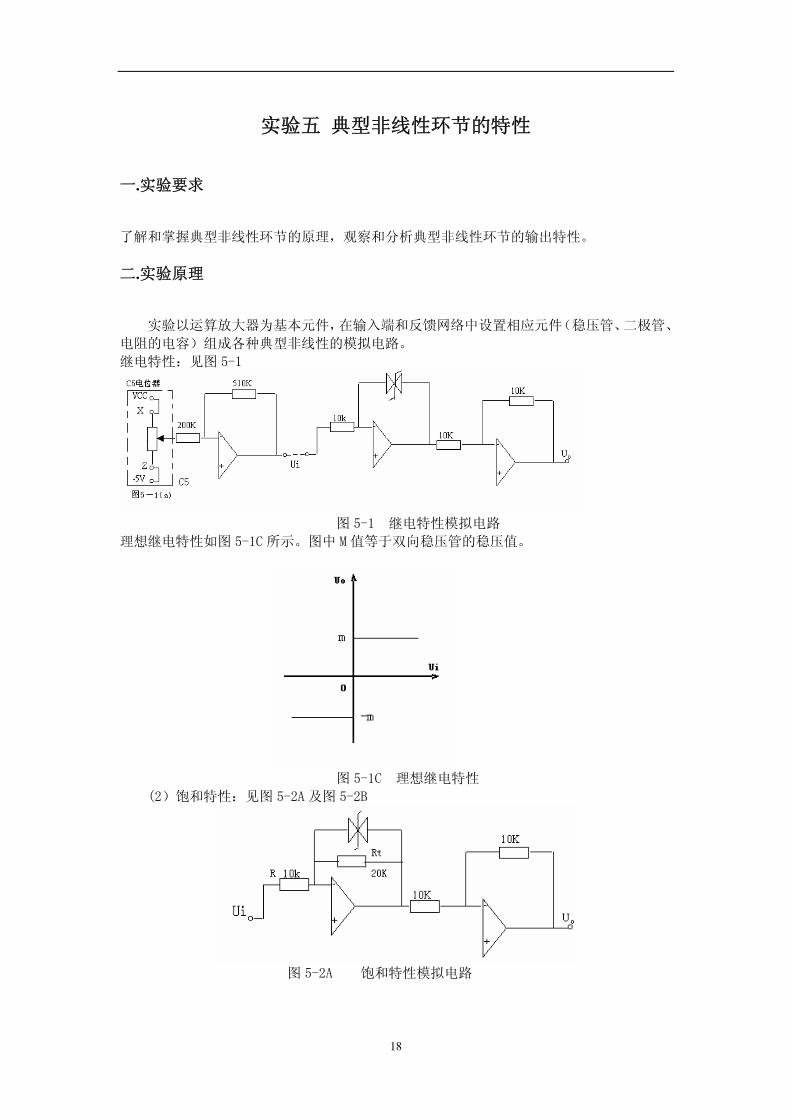
继电特性:见图 5-1
图 5-1 继电特性模拟电路
理想继电特性如图 5-1C 所示。图中 M 值等于双向稳压管的稳压值。
图 5-1C 理想继电特性
(2)饱和特性:见图 5-2A 及图 5-2B
图 5-2A 饱和特性模拟电路
18
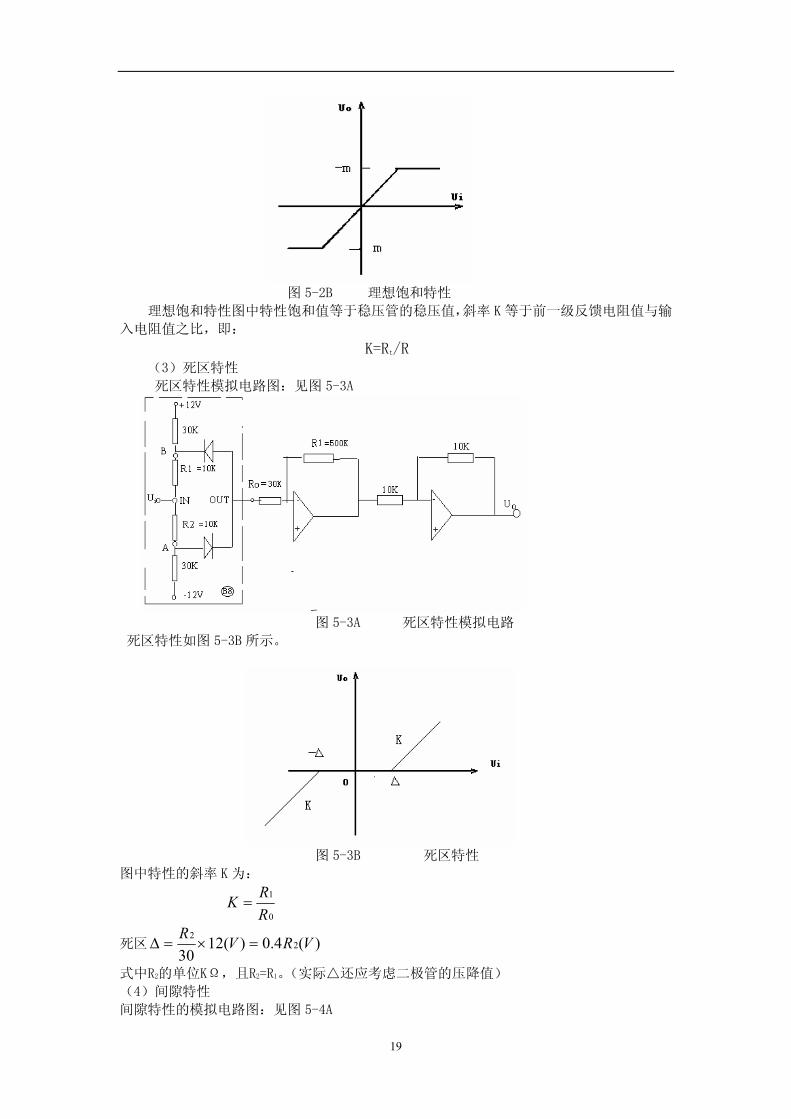
图 5-2B 理想饱和特性
理想饱和特性图中特性饱和值等于稳压管的稳压值,斜率 K等于前一级反馈电阻值与输
入电阻值之比,即:
K=Rt/R (3)死区特性
死区特性模拟电路图:见图 5-3A
图 5-3A 死区特性模拟电路
死区特性如图 5-3B 所示。
图 5-3B 死区特性
图中特性的斜率 K 为:
0
1
RRK =
死区 )(4.0)(1230
22 VRVR
=×=Δ
式中R2的单位KΩ,且R2=R1。(实际还应考虑二极管的压降值)
(4)间隙特性
间隙特性的模拟电路图:见图 5-4A
19
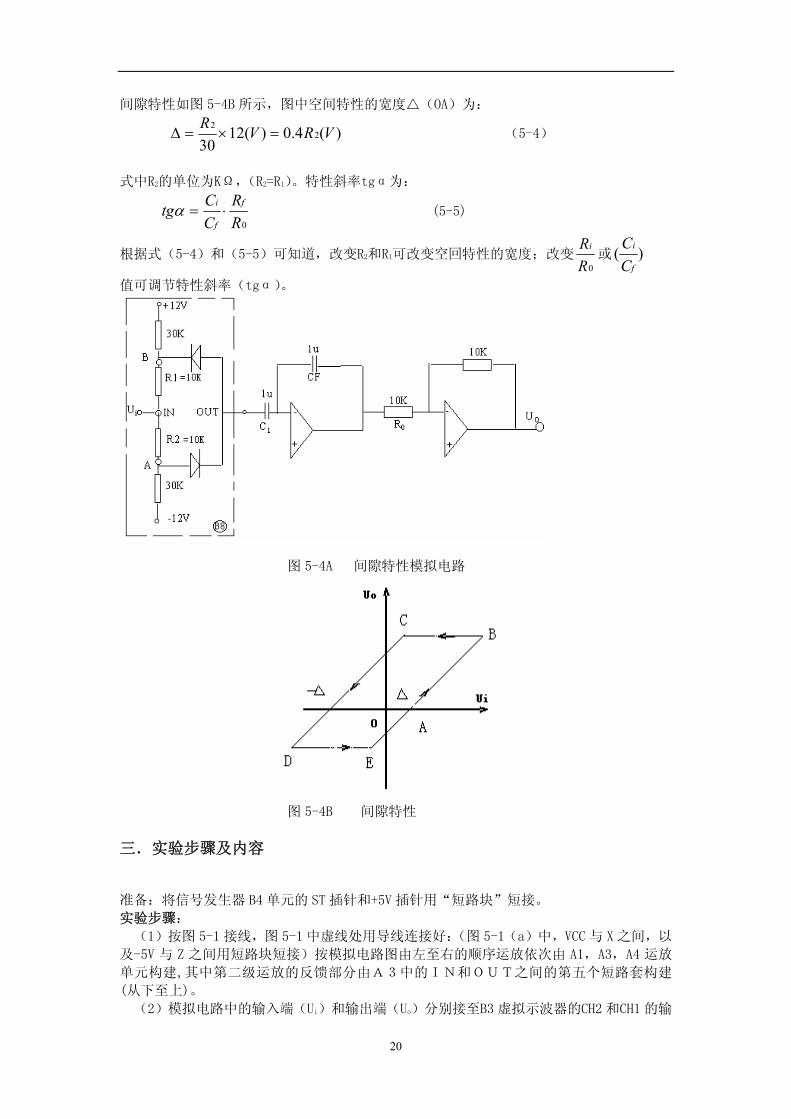
间隙特性如图 5-4B 所示,图中空间特性的宽度(OA)为:
)(4.0)(1230
22 VRVR
=×=Δ (5-4)
式中R2的单位为KΩ,(R2=R1)。特性斜率tgα为:
0RR
CCtg f
f
i⋅=α (5-5)
根据式(5-4)和(5-5)可知道,改变R2和R1可改变空回特性的宽度;改变0RRi
或 )(f
i
CC
值可调节特性斜率(tgα)。
图 5-4A 间隙特性模拟电路
图 5-4B 间隙特性
三.实验步骤及内容
准备:将信号发生器 B4 单元的 ST 插针和+5V 插针用“短路块”短接。
实验步骤:
(1)按图 5-1 接线,图 5-1 中虚线处用导线连接好:(图 5-1(a)中,VCC 与 X 之间,以
及-5V 与 Z 之间用短路块短接)按模拟电路图由左至右的顺序运放依次由 A1,A3,A4 运放
单元构建,其中第二级运放的反馈部分由A3中的IN和OUT之间的第五个短路套构建
(从下至上)。
(2)模拟电路中的输入端(Ui)和输出端(Uo)分别接至B3 虚拟示波器的CH2 和CH1 的输
20
入端(CH1,CH2 选X5 档)观察时要用虚拟示波器中的X-Y选项 (具体操作参见用户手册虚拟
示波器)。
(3)调节输入电压,观测并记录示波器上的U0~U1图形;
(4)按图 5-2A 连线,其中运放由 A3,A4 单元构建,Ui 接 C5 电位器的 Y 端,VCC 与 X
之间,以及-5V 与 Z 之间用短路块短接。重复(2),(3).
(5) 按图 5-3A 连线,其中运放由 A1,A4 单元构建,B8 中的 IN 与 C5 中的电位器 Y 端相
连,VCC 与 X 之间,以及-5v 与 Z 之间用短路块短接,B8 部分 A 与 IN,B 与 IN 之间用 10K
电阻相连,重复(2),(3)。
(6)按图 5-4A 连线,其中运放由 A2,A4 单元构建, B8 中的 IN 与 C5 中的电位器 Y 端
相连,VCC 与 X 之间,以及-5v 与 Z 之间用短路块短接,B8 部分 A 与 IN,B 与 IN 之间用 10K
电阻相连,注意做该实验前应放电,放电方法见 P4,重复(2),(3)。
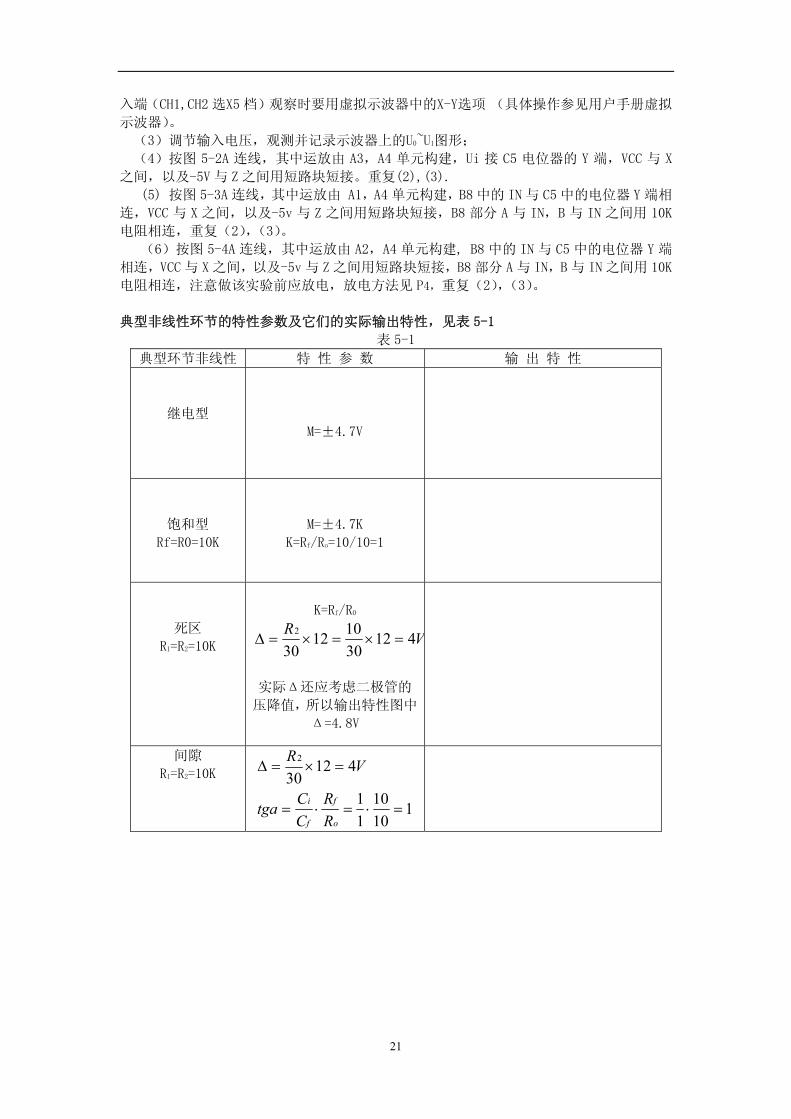
典型非线性环节的特性参数及它们的实际输出特性,见表 5-1
表 5-1
典型环节非线性 特 性 参 数 输 出 特 性
继电型
M=±4.7V
饱和型
Rf=R0=10K
M=±4.7K
K=Rf/Ro=10/10=1
死区
R1=R2=10K
K=Rf/R0
VR 412301012
302
=×=×=Δ
实际Δ还应考虑二极管的
压降值,所以输出特性图中
Δ=4.8V
间隙
R1=R2=10K
11010
11
41230
2
=⋅=⋅=
=×=Δ
o
f
f
i
RR
CCtga
VR
21
实验六 非线性环节的相平面分析法
实验要求
了解和掌握非线性系统的原理,学会用相轨迹分析非线性系统的瞬间响应和稳态误差。
实验原理
相平面图表征系统在各种初始条件下的运动过程,相轨迹则表征系统在某个初始条件下
的运动过程,相轨迹可用图解法求得,也可用实验法直接获得。当改变阶跃信号的幅值,即
改变系统的初始条件时,便获得一系列相轨迹。根据相轨迹的形状和位置就能分析系统的瞬
态响应和稳态误差。
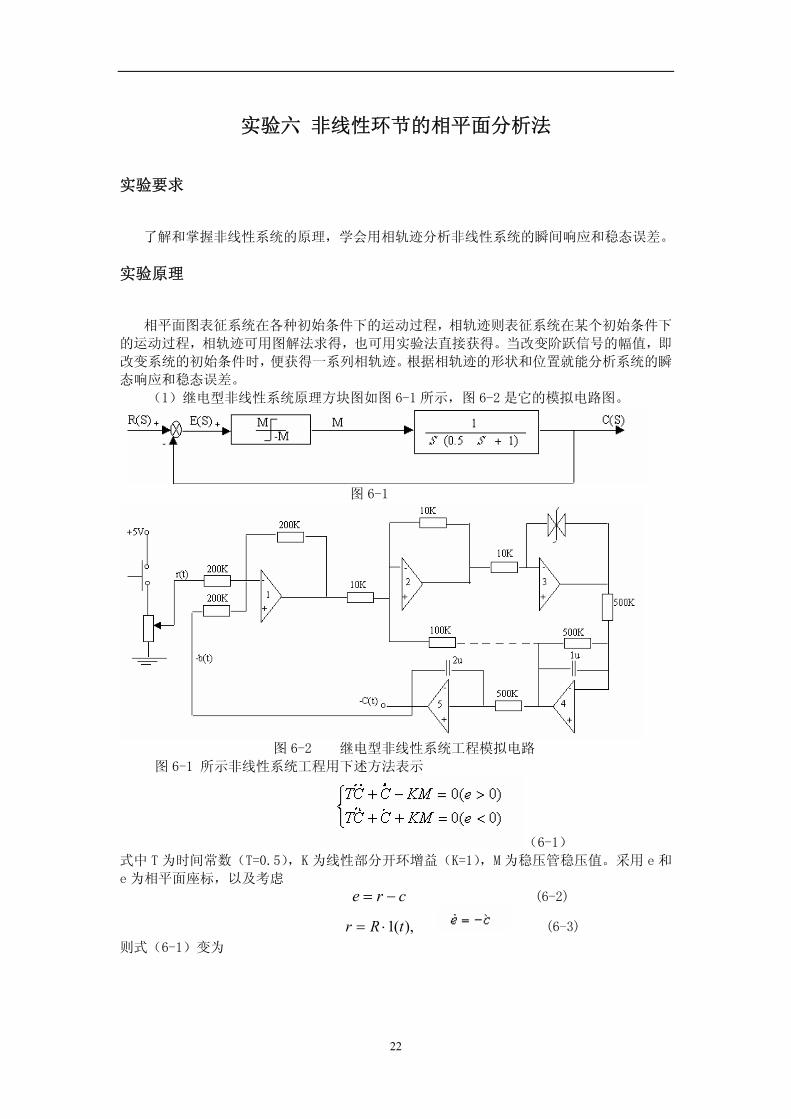
(1)继电型非线性系统原理方块图如图 6-1 所示,图 6-2 是它的模拟电路图。
图 6-1
图 6-2 继电型非线性系统工程模拟电路
图 6-1 所示非线性系统工程用下述方法表示
(6-1)
式中 T 为时间常数(T=0.5),K 为线性部分开环增益(K=1),M 为稳压管稳压值。采用 e 和
e 为相平面座标,以及考虑
cre −= (6-2)
),(1 tRr ⋅= (6-3)
则式(6-1)变为
22
(6-4)
代入 T=0.5、K=1、以及所选用稳压值 M,应用等倾线法作出当初始条件为
e(0)=r(0)-c(0)=r(0)=R 时的相轨迹,改变 r(0)值就可得到一簇相轨迹。
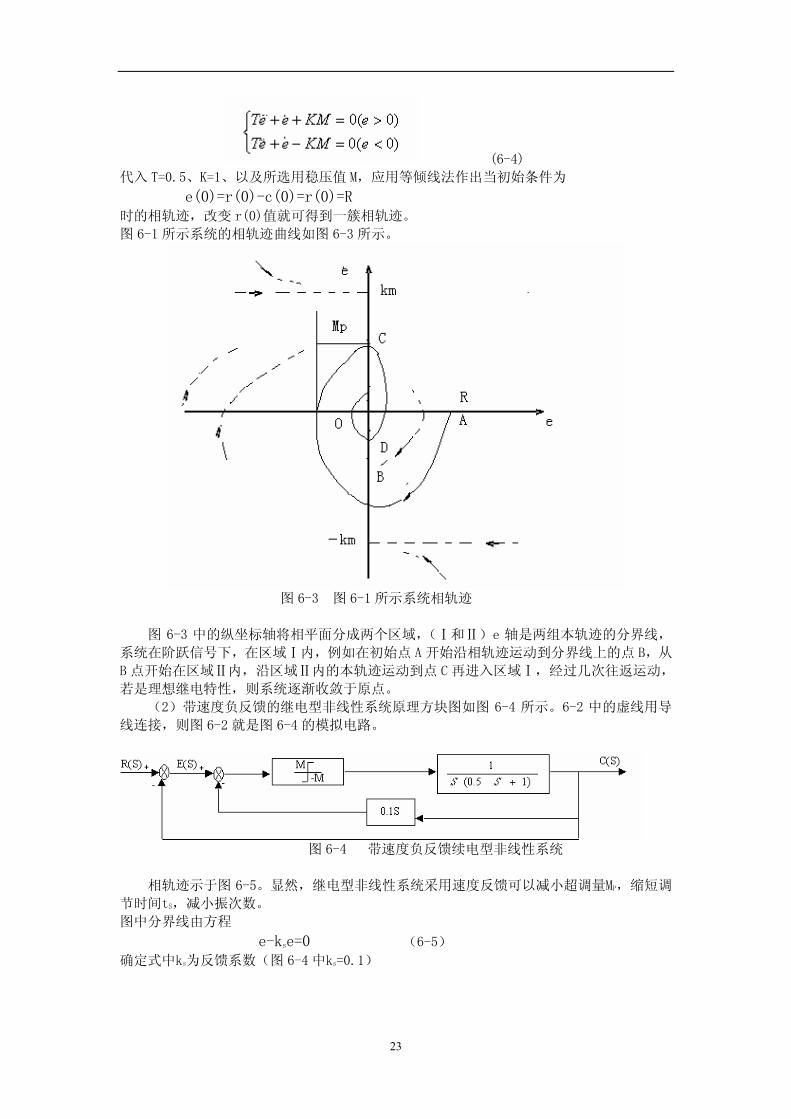
图 6-1 所示系统的相轨迹曲线如图 6-3 所示。
图 6-3 图 6-1 所示系统相轨迹
图 6-3 中的纵坐标轴将相平面分成两个区域,(Ⅰ和Ⅱ)e 轴是两组本轨迹的分界线,
系统在阶跃信号下,在区域Ⅰ内,例如在初始点 A 开始沿相轨迹运动到分界线上的点 B,从
B 点开始在区域Ⅱ内,沿区域Ⅱ内的本轨迹运动到点 C 再进入区域Ⅰ,经过几次往返运动,
若是理想继电特性,则系统逐渐收敛于原点。
(2)带速度负反馈的继电型非线性系统原理方块图如图 6-4 所示。6-2 中的虚线用导
线连接,则图 6-2 就是图 6-4 的模拟电路。
图 6-4 带速度负反馈续电型非线性系统
相轨迹示于图 6-5。显然,继电型非线性系统采用速度反馈可以减小超调量MP,缩短调
节时间tS,减小振次数。
图中分界线由方程
e-kse=0 (6-5)
确定式中ks为反馈系数(图 6-4 中ks=0.1)
23
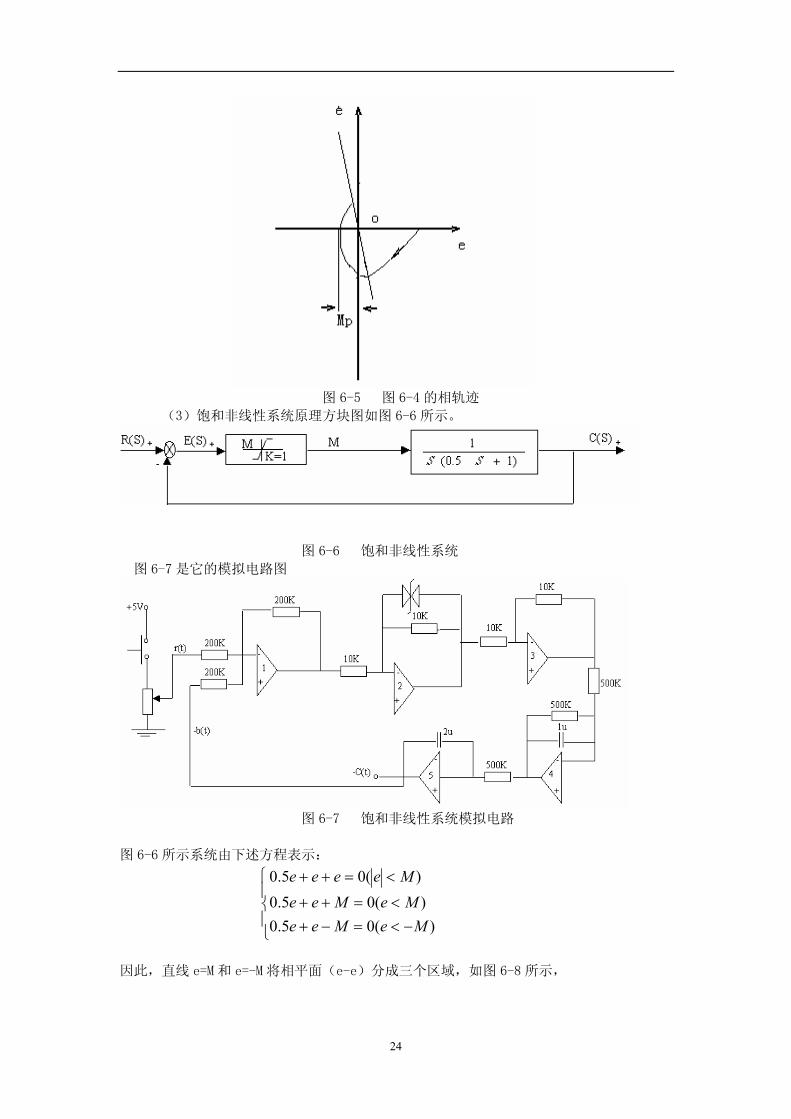
图 6-5 图 6-4 的相轨迹
(3)饱和非线性系统原理方块图如图 6-6 所示。
图 6-6 饱和非线性系统
图 6-7 是它的模拟电路图
图 6-7 饱和非线性系统模拟电路
图 6-6 所示系统由下述方程表示:
⎪⎩
⎪⎨
⎧
−<=−+<=++
<=++
)(05.0)(05.0
)(05.0
MeMeeMeMeeMeeee
因此,直线 e=M 和 e=-M 将相平面(e-e)分成三个区域,如图 6-8 所示,
24
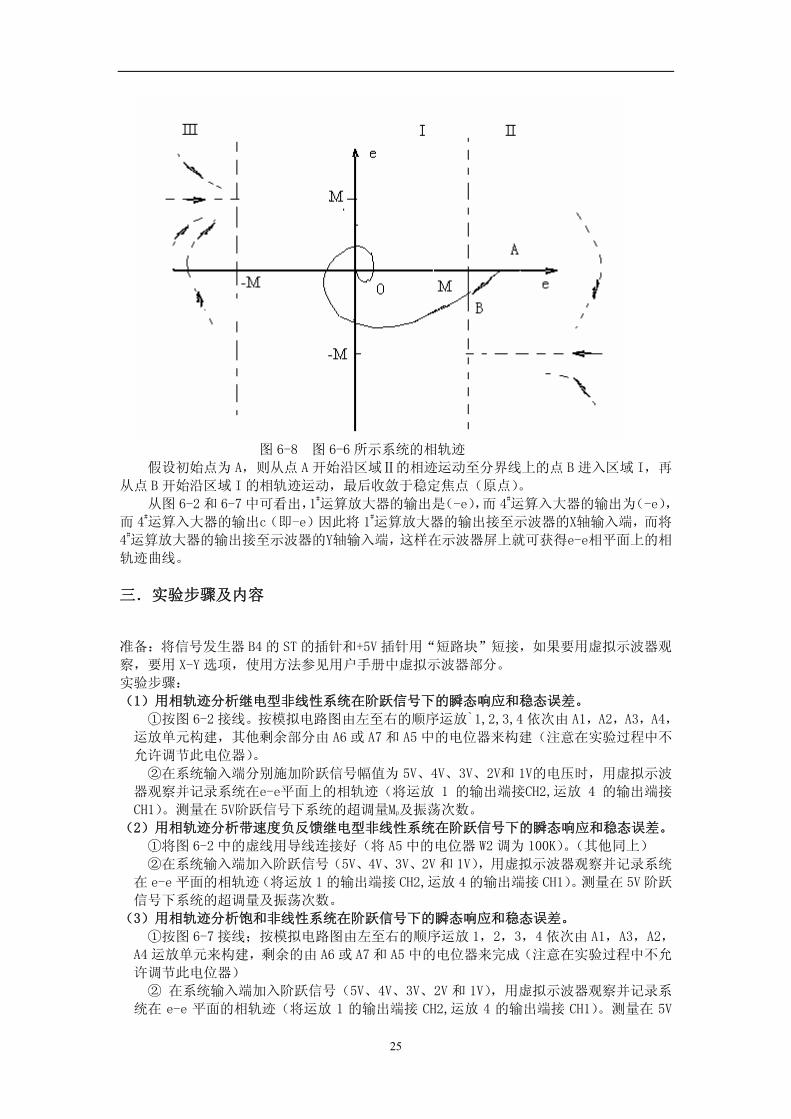
图 6-8 图 6-6 所示系统的相轨迹
假设初始点为 A,则从点 A 开始沿区域Ⅱ的相迹运动至分界线上的点 B 进入区域 I,再
从点 B 开始沿区域 I 的相轨迹运动, 后收敛于稳定焦点(原点)。
从图 6-2 和 6-7 中可看出,1#运算放大器的输出是(-e),而 4
#运算入大器的输出为(-e),
而 4#运算入大器的输出c(即-e)因此将 1
#运算放大器的输出接至示波器的X轴输入端,而将
4#运算放大器的输出接至示波器的Y轴输入端,这样在示波器屏上就可获得e-e相平面上的相
轨迹曲线。
三.实验步骤及内容
准备:将信号发生器 B4 的 ST 的插针和+5V 插针用“短路块”短接,如果要用虚拟示波器观
察,要用 X-Y 选项,使用方法参见用户手册中虚拟示波器部分。
实验步骤:
(1)用相轨迹分析继电型非线性系统在阶跃信号下的瞬态响应和稳态误差。
①按图 6-2 接线。按模拟电路图由左至右的顺序运放`1,2,3,4 依次由 A1,A2,A3,A4,
运放单元构建,其他剩余部分由 A6 或 A7 和 A5 中的电位器来构建(注意在实验过程中不
允许调节此电位器)。
②在系统输入端分别施加阶跃信号幅值为 5V、4V、3V、2V和 1V的电压时,用虚拟示波
器观察并记录系统在e-e平面上的相轨迹(将运放 1 的输出端接CH2,运放 4 的输出端接
CH1)。测量在 5V阶跃信号下系统的超调量Mp及振荡次数。
(2)用相轨迹分析带速度负反馈继电型非线性系统在阶跃信号下的瞬态响应和稳态误差。
①将图 6-2 中的虚线用导线连接好(将 A5 中的电位器 W2 调为 100K)。(其他同上)
②在系统输入端加入阶跃信号(5V、4V、3V、2V 和 1V),用虚拟示波器观察并记录系统
在 e-e 平面的相轨迹(将运放 1 的输出端接 CH2,运放 4 的输出端接 CH1)。测量在 5V 阶跃
信号下系统的超调量及振荡次数。
(3)用相轨迹分析饱和非线性系统在阶跃信号下的瞬态响应和稳态误差。
①按图 6-7 接线;按模拟电路图由左至右的顺序运放 1,2,3,4 依次由 A1,A3,A2,
A4 运放单元来构建,剩余的由 A6 或 A7 和 A5 中的电位器来完成(注意在实验过程中不允
许调节此电位器)
② 在系统输入端加入阶跃信号(5V、4V、3V、2V 和 1V),用虚拟示波器观察并记录系
统在 e-e 平面的相轨迹(将运放 1 的输出端接 CH2,运放 4 的输出端接 CH1)。测量在 5V
25

阶跃信号下系统的超调量及振荡次数。
(4)实验结果分析
(1)研究带速度负反馈继电型非线性系统动态性能。
实验测得数据如表 6-1 所示
表 6-1 (当U1=5V时)
不带速度负反馈的继电器非线性系统 带速度负反馈的继电型非线性系统
Mp 0.2V 0.05V
振荡次数 2 次 无
很显然,当继电型非线性系统加上速度负反馈可以减小超调量,即平稳性加大,缩短调节时
间tS,减小振荡次数,系统的快速性得到提高。
(2)研究饱和非线性系统
通过实验,测得此时当U1=5V阶跃输入时,系统的超调为 0.4V,且无振荡。
由于饱和特性在大信号时的等效增益很低,故带饱和非线性的控制系统,一般在大起始
偏离下总具有收敛的性质,系统 终可能稳定, 坏的情况是自振,而不会造成愈大的不稳
定状态。当然,如果饱和点过低,则在提高系统平稳性的同时,将使系统的快速性和稳态跟
踪精度有所下降。
(3)三种非线性系统的相轨迹图,如图 6-9 所示。
不带速度负反馈的继电型系统 饱和非性系统 带速度负反馈的继电型系统
图 6-9
26
实验七 非线性环节的描述函数分析法
一.实验要求
了解和掌握相平面法,学会用相平面法分析非线性三阶系统。
二.实验原理
对于二阶系统,相平面图含有系统运动的全部信息,对于高阶系统,相平面图虽然不包
含系统运动的全部信息,但是相平面图表征了系统某些状态的运动过程,而用实验法可以直
接获得系统的相轨迹,因此它对于高阶系统的研究也是有用的。
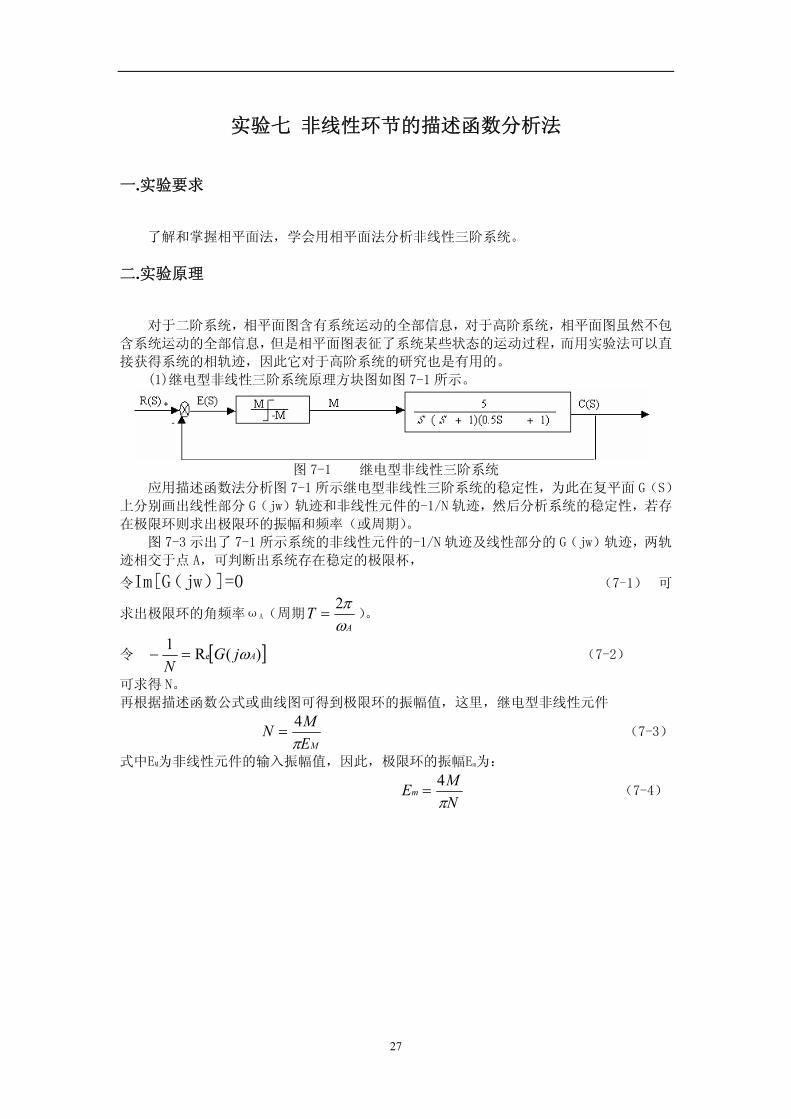
(1)继电型非线性三阶系统原理方块图如图 7-1 所示。
图 7-1 继电型非线性三阶系统
应用描述函数法分析图 7-1 所示继电型非线性三阶系统的稳定性,为此在复平面 G(S)
上分别画出线性部分 G(jw)轨迹和非线性元件的-1/N 轨迹,然后分析系统的稳定性,若存
在极限环则求出极限环的振幅和频率(或周期)。
图 7-3 示出了 7-1 所示系统的非线性元件的-1/N 轨迹及线性部分的 G(jw)轨迹,两轨
迹相交于点 A,可判断出系统存在稳定的极限杯,
令Im[G(jw)]=0 (7-1) 可
求出极限环的角频率ωA(周期A
Tωπ2
= )。
令 [ )(R1e AjG ]
Nω=− (7-2)
可求得 N。
再根据描述函数公式或曲线图可得到极限环的振幅值,这里,继电型非线性元件
MEMN
π4
= (7-3)
式中EM为非线性元件的输入振幅值,因此,极限环的振幅Em为:
NMEmπ4
= (7-4)
27
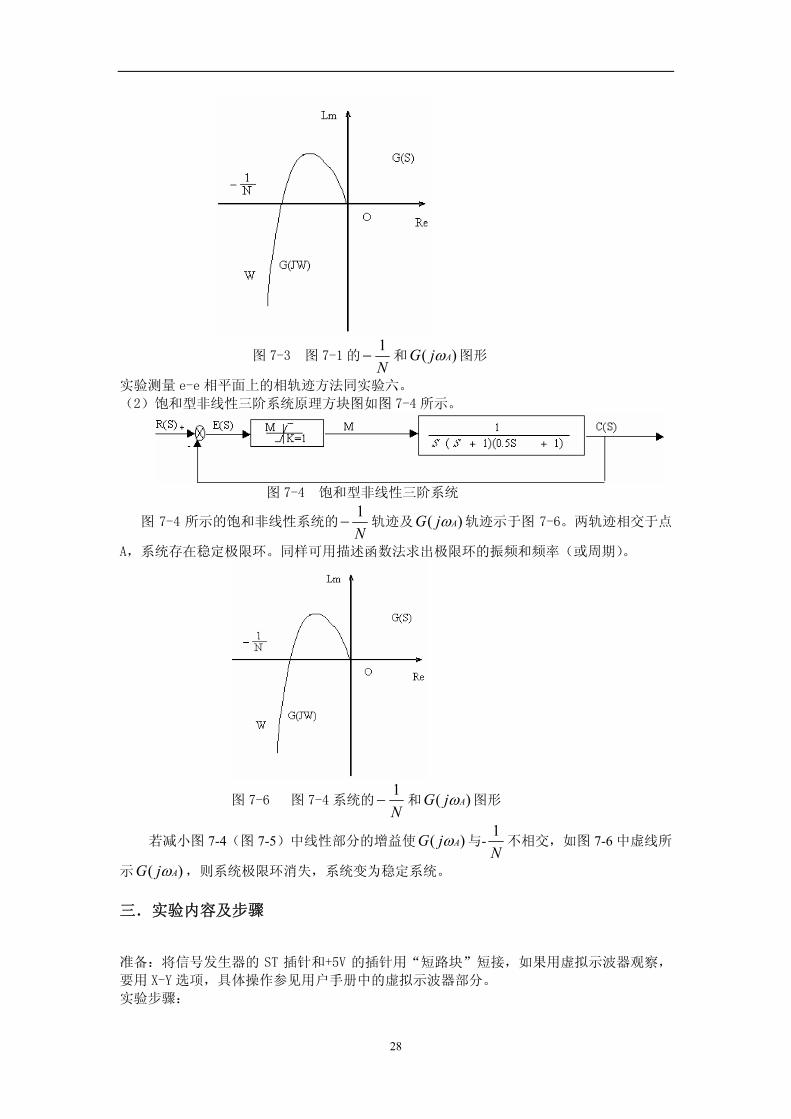
图 7-3 图 7-1 的N1
− 和 )( AjG ω 图形
实验测量 e-e 相平面上的相轨迹方法同实验六。
(2)饱和型非线性三阶系统原理方块图如图 7-4 所示。
图 7-4 饱和型非线性三阶系统
图 7-4 所示的饱和非线性系统的N1
− 轨迹及 )( AjG ω 轨迹示于图 7-6。两轨迹相交于点
A,系统存在稳定极限环。同样可用描述函数法求出极限环的振频和频率(或周期)。
图 7-6 图 7-4 系统的N1
− 和 )( AjG ω 图形
若减小图 7-4(图 7-5)中线性部分的增益使 )( AjG ω 与-N1
不相交,如图 7-6 中虚线所
示 )( AjG ω ,则系统极限环消失,系统变为稳定系统。
三.实验内容及步骤
准备:将信号发生器的 ST 插针和+5V 的插针用“短路块”短接,如果用虚拟示波器观察,
要用 X-Y 选项,具体操作参见用户手册中的虚拟示波器部分。
实验步骤:
28

(1)用相平面法分析继电型非线性三阶系统。
继电型非线性三阶系统模拟电路图
图 7-2
①按图 7-2 接线。图中的运放 1 由 A2 构建,其中反馈电阻由A2中IN和OUT之间
的第三短路套构建(由下至上),运放 2 由 A3 构建,运放 3 由 A6 自行搭建,运放 4 由 A1
构建,运放 5 由 A4 构建。电阻 200K 由 A5 中的电位器来构建(注意在实验过程中不允许调
节此电位器)。
②用虚拟示波器观测系统在e-e平面上相轨迹(运放 1的输出端接CH2,运放 4输出端接
CH1)。
③测量自激振荡(极限环)的振幅和周期
(2)用相平面法纪分析饱和型非线性三阶系统
饱和型非线性三阶系统模拟电路图
图 7-5
①按图 7-5 接线。其中运放 1,2,3,4 分别对应着 A2,A3,A4,A1,运放 5 由 A6 自
行搭建完成,剩余电阻值 200K 由 A5 中的电位器构建(注意在实验过程中不允许调节此电位
器)。
②用虚拟示波器观测系统在e-e平面上相轨迹(运放 1的输出端接CH2,运放 4输出端接
CH1)。
③测量自激振荡的振幅和角频率。
④减小线性部分增益,测量自激振荡的振幅和周期。
⑤继续减小线性部分增益,直至自激振荡现象消失。
四.实验结果分析
首先根据原理部分,分别求出图 7-1、图 7-4 的极限环的振幅及角频率或周期。填入表 7-1
中。
29
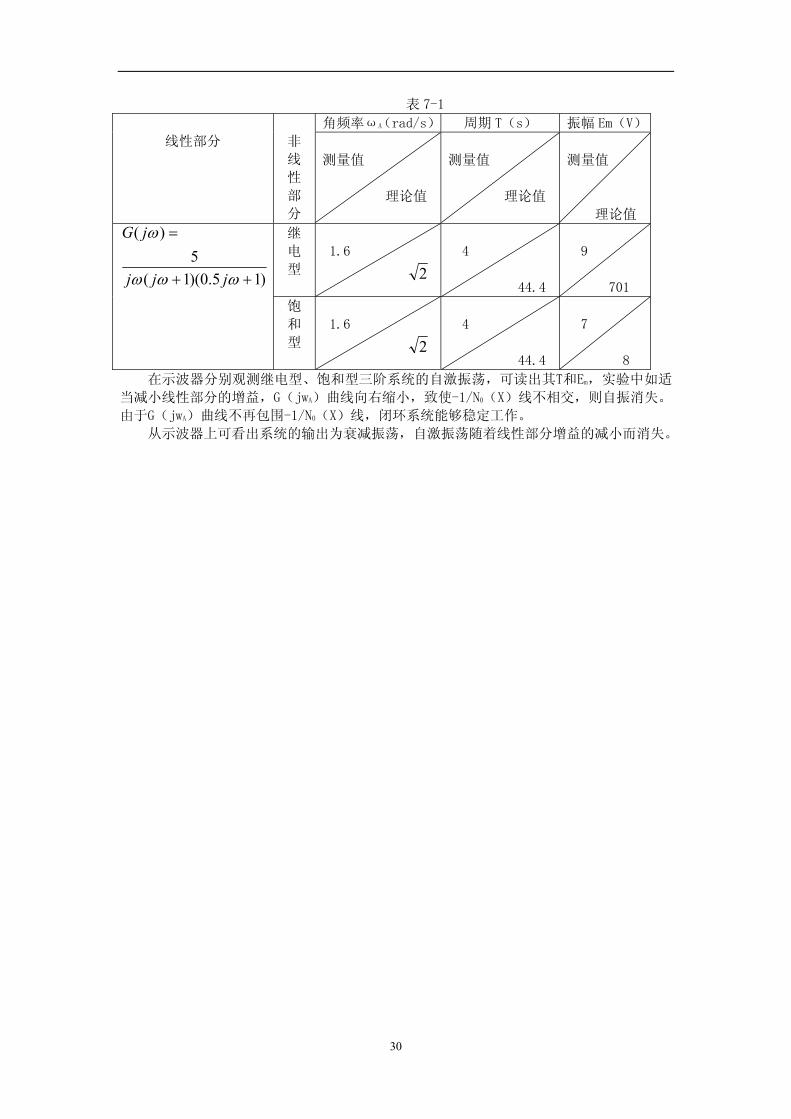
表 7-1
角频率ωA(rad/s) 周期 T(s) 振幅 Em(V)
线性部分
非
线
性
部
分
测量值
理论值
测量值
理论值
测量值
理论值
继
电
型
1.6
2
4
44.4
9
701 )15.0)(1(
5)(
++
=
ωωω
ω
jjj
jG
饱
和
型
1.6
2
4
44.4
7
8
在示波器分别观测继电型、饱和型三阶系统的自激振荡,可读出其T和Em,实验中如适
当减小线性部分的增益,G(jwA)曲线向右缩小,致使-1/N0(X)线不相交,则自振消失。
由于G(jwA)曲线不再包围-1/N0(X)线,闭环系统能够稳定工作。
从示波器上可看出系统的输出为衰减振荡,自激振荡随着线性部分增益的减小而消失。
30
实验八 状态变量反馈系统的设计
一.实验要求
了解和掌握状态反馈的原理,观察和分析极点配置后系统的阶跃响应曲线。
二. 实验原理
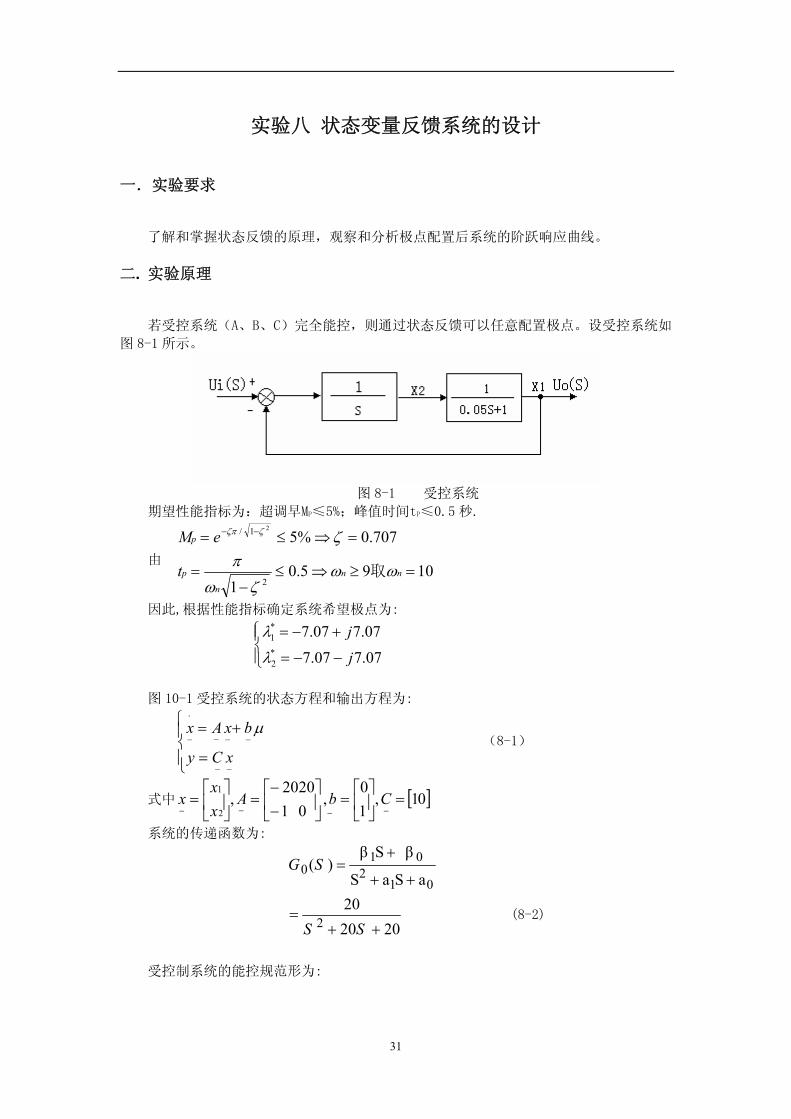
若受控系统(A、B、C)完全能控,则通过状态反馈可以任意配置极点。设受控系统如
图 8-1 所示。
图 8-1 受控系统
期望性能指标为:超调早MP≤5%;峰值时间tP≤0.5 秒.
由 1095.0
1
707.0%5
2
1/ 2
=≥⇒≤−
=
=⇒≤= −−
nn
n
p
p
t
eM
ωωζω
πζζζπ
取
因此,根据性能指标确定系统希望极点为:
⎪⎩
⎪⎨⎧
−−=
+−=
07.707.7
07.707.7*2
*1
j
j
λ
λ
图 10-1 受控系统的状态方程和输出方程为:
(8-1)
⎪⎩
⎪⎨⎧
=
+=
−−
−−−
⋅
−
xCy
bxAx μ
式中 ][ 01,10
,020
120
,2
1=⎥
⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡−−
=⎥⎦
⎤⎢⎣
⎡=
−−−−CbA
xx
x
系统的传递函数为:
2020
20aSaS
βSβ)(
2
012
010
++=
++
+=
SS
SG
(8-2)
受控制系统的能控规范形为:
31

[ ] [ ]020,10
201
20010
T
)381(
101
1
1
===⎥⎦
⎤⎢⎣
⎡==
⎥⎦
⎤−⎢
⎣
⎡−
=⎥⎦
⎤−⎢
⎣
⎡−
==
=⎩⎨⎧
=−−+=
−
−
−
ββTCCbTb
aaTATA
XTX
XCYUbXAX
KK
ioK
K
KK
kKKK
为变换阵),(式中
当引入状态反馈阵KK=[K0K1]后,闭环系统 ( )KKKKK CbKbA ,,− 的传递函数为:
( ) ( )
( )012
012
01
20)20(20
20)(
KSKS
KaSKSSSG
o
++++=
+++++
=ββ
(8-4)
而希望的闭环系统特征多项为:
(8-5)
1001.14
))((
)(
2
*2
*1
**1
2*
++=
−−=
++=
SS
SS
aSaSSf o
λλ
令GK(S)的分母等于F#(S),则得到KK为:
[ ] [ 9.58010 ]−== KKK k
后确定原受控系统的状态反馈阵 K:
由于 1−= TKK k
求得和 === −−− 111 , TCbTbTATA KkK
求得 ⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
−=−
11
0201
1T
所以状态反馈阵为:
[ ] [ ]9.59.911
0201
9.580 −=⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
−−=K
极点配置系统如图 10-2 或图 10-3 所示:
32
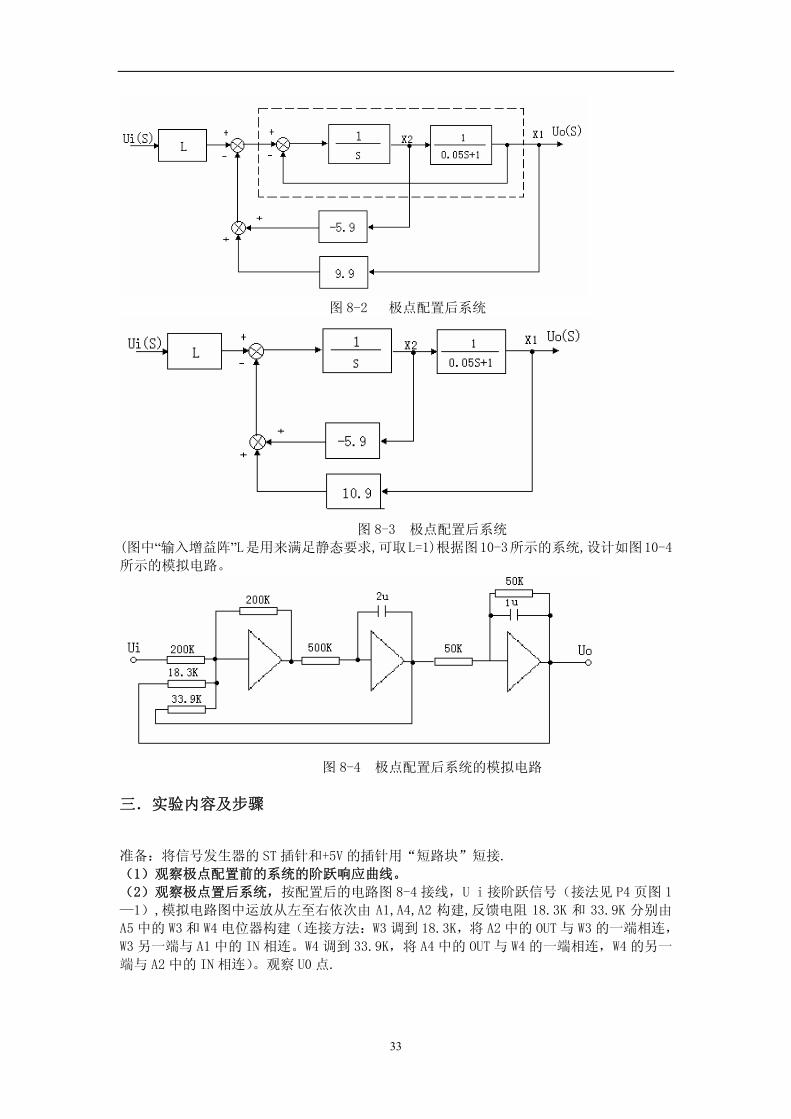
图 8-2 极点配置后系统
图 8-3 极点配置后系统
(图中“输入增益阵”L是用来满足静态要求,可取L=1)根据图10-3所示的系统,设计如图10-4
所示的模拟电路。
图 8-4 极点配置后系统的模拟电路
三.实验内容及步骤
准备:将信号发生器的 ST 插针和+5V 的插针用“短路块”短接.
(1)观察极点配置前的系统的阶跃响应曲线。
(2)观察极点置后系统,按配置后的电路图 8-4 接线,U i 接阶跃信号(接法见 P4 页图 1
—1),模拟电路图中运放从左至右依次由 A1,A4,A2 构建,反馈电阻 18.3K 和 33.9K 分别由
A5 中的 W3 和 W4 电位器构建(连接方法:W3 调到 18.3K,将 A2 中的 OUT 与 W3 的一端相连,
W3 另一端与 A1 中的 IN 相连。W4 调到 33.9K,将 A4 中的 OUT 与 W4 的一端相连,W4 的另一
端与 A2 中的 IN 相连)。观察 U0 点.
33
实验九 温度闭环控制实验
1.实验要求
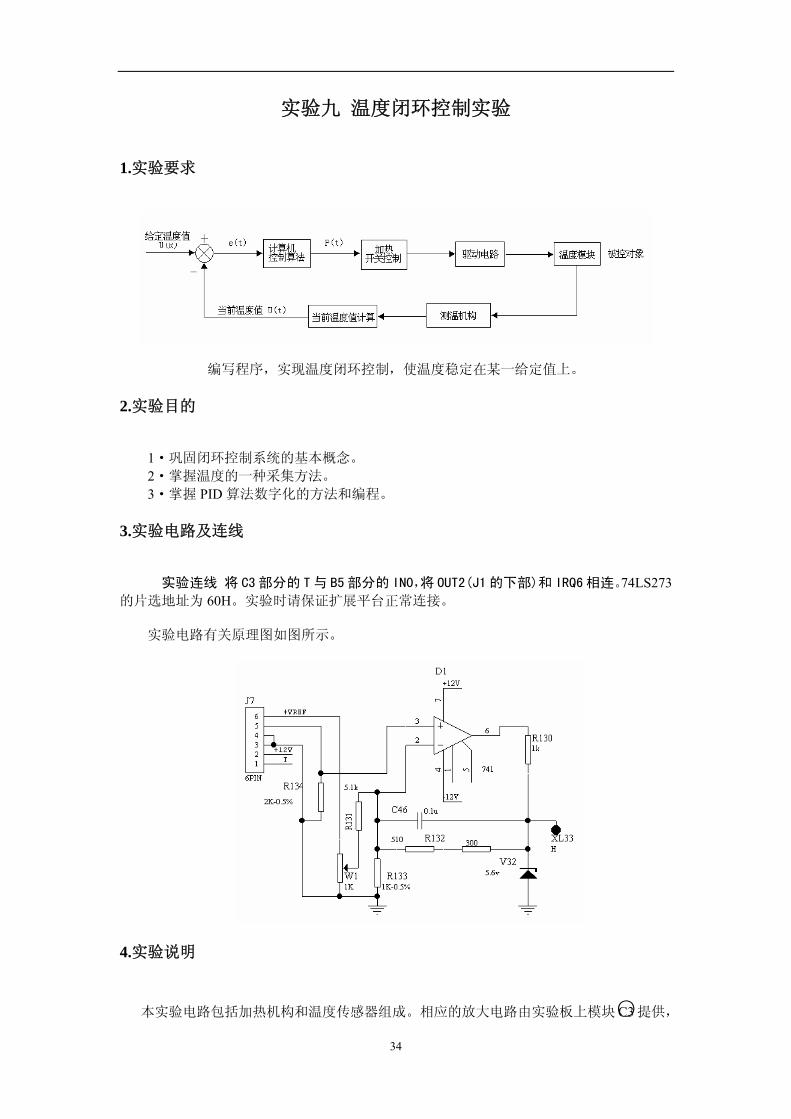
编写程序,实现温度闭环控制,使温度稳定在某一给定值上。
2.实验目的
1·巩固闭环控制系统的基本概念。 2·掌握温度的一种采集方法。 3·掌握 PID 算法数字化的方法和编程。
3.实验电路及连线
实验连线 将 C3部分的T与 B5部分的IN0,将 OUT2(J1的下部)和 IRQ6相连。74LS273的片选地址为 60H。实验时请保证扩展平台正常连接。
实验电路有关原理图如图所示。
4.实验说明
本实验电路包括加热机构和温度传感器组成。相应的放大电路由实验板上模块C3 提供,
34
之间通过插座 J7 连接. 加热机构由三极管和散热片构成。加热控制信号由 74LS273(8 位 D 触发器)的输出 Q5
控制,高电平为加热;低电平为停止加热。通过控制 Q5 点的电平,可以控制加热及速度。
系统靠自然冷却降温。 温度采集使用热敏电阻,转化成电压值送出。该输出量经放大后,可以经 A/D 转换器转
换成数字量,编制程序,实现采集和控制温度。 扩展平台上测温机构输出电压经放大送至本单元的插孔 T。使用 A/D 转换器采样 T 的
值,根据下表关系采用分段直线拟和就可以得到当前温度。
温度 C0 T 点电压 V 温度 C0 T 点电压 V0 0 40 1.92 5 0.15 45 2.27
10 0.32 50 2.64 15 0.52 55 3.02 20 0.75 60 3.39 25 1.01 65 2.77 30 1.29 70 4.16 35 1.61
调节精密可调电位器 W1 的值可以实现调零(即 0 摄氏度时,T 点电压输出为 0。注意机
器出厂前已经调零了)。 由于热敏电阻和温度测量系统的放大部分存在非线性,在测量过程中,会带来系统测量
误差。为了进一步提高测量精度,可以采用软件进行校正。 关于 PID 闭环算法的实现,在实验一中已有详细说明,请参阅相关部分。
5.实验现象
选择 LCAACT 软件“设置”->“环境参数”->“特征曲线”,打开“工具”->“软件
示波器”->“温度示波”,点击开始即可(具体操作见用户手册中虚拟示波器),适当调整
参数以达到理想的波形。
注意:由于采用自然散热,温度下降所需时间较长。
35
实验十 步进电机调速实验
1.实验要求
编制程序,控制步进电动机的运转速度。 编制程序,控制步进电动机的旋转方向。
2.实验目的
掌握步进电动机控制系统的硬件设计方法。 掌握步进电动机速度调节、方向控制技术。 进一步学习编制步进电动机驱动程序的软件设计方法。
3.实验电路及连线
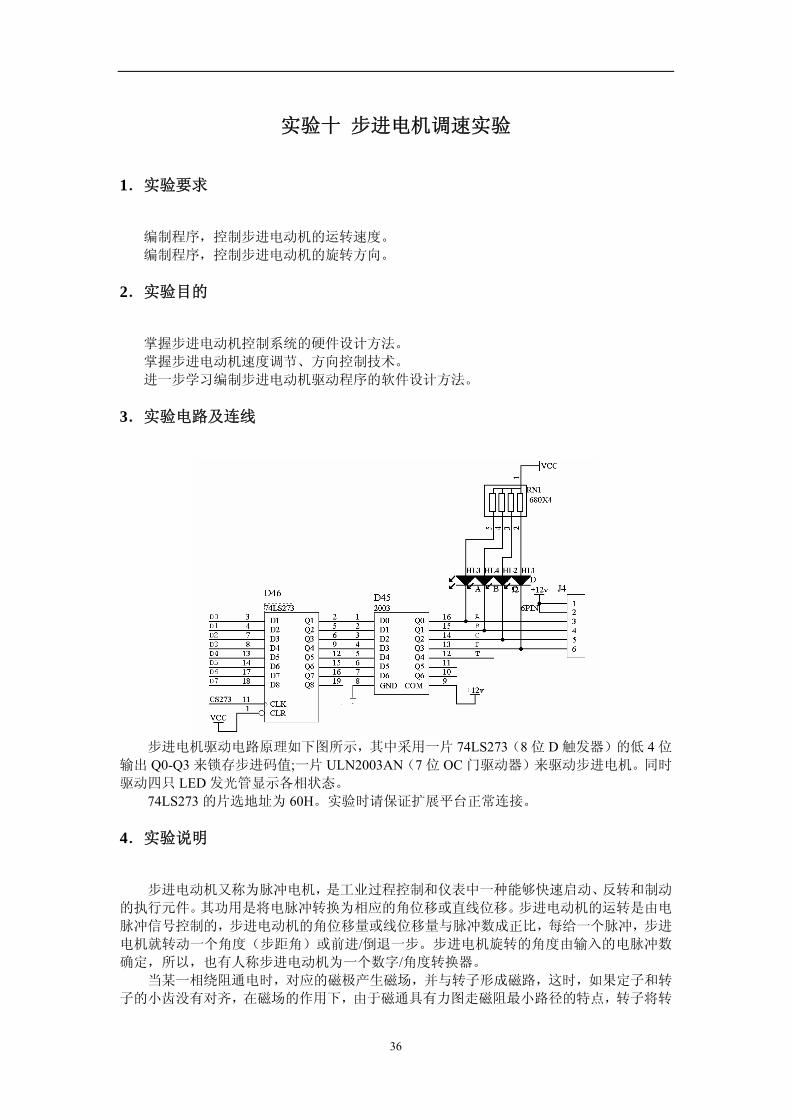
步进电机驱动电路原理如下图所示,其中采用一片 74LS273(8 位 D 触发器)的低 4 位
输出 Q0-Q3 来锁存步进码值;一片 ULN2003AN(7 位 OC 门驱动器)来驱动步进电机。同时
驱动四只 LED 发光管显示各相状态。 74LS273 的片选地址为 60H。实验时请保证扩展平台正常连接。
4.实验说明
步进电动机又称为脉冲电机,是工业过程控制和仪表中一种能够快速启动、反转和制动
的执行元件。其功用是将电脉冲转换为相应的角位移或直线位移。步进电动机的运转是由电
脉冲信号控制的,步进电动机的角位移量或线位移量与脉冲数成正比,每给一个脉冲,步进
电机就转动一个角度(步距角)或前进/倒退一步。步进电机旋转的角度由输入的电脉冲数
确定,所以,也有人称步进电动机为一个数字/角度转换器。 当某一相绕阻通电时,对应的磁极产生磁场,并与转子形成磁路,这时,如果定子和转
子的小齿没有对齐,在磁场的作用下,由于磁通具有力图走磁阻 小路径的特点,转子将转
36
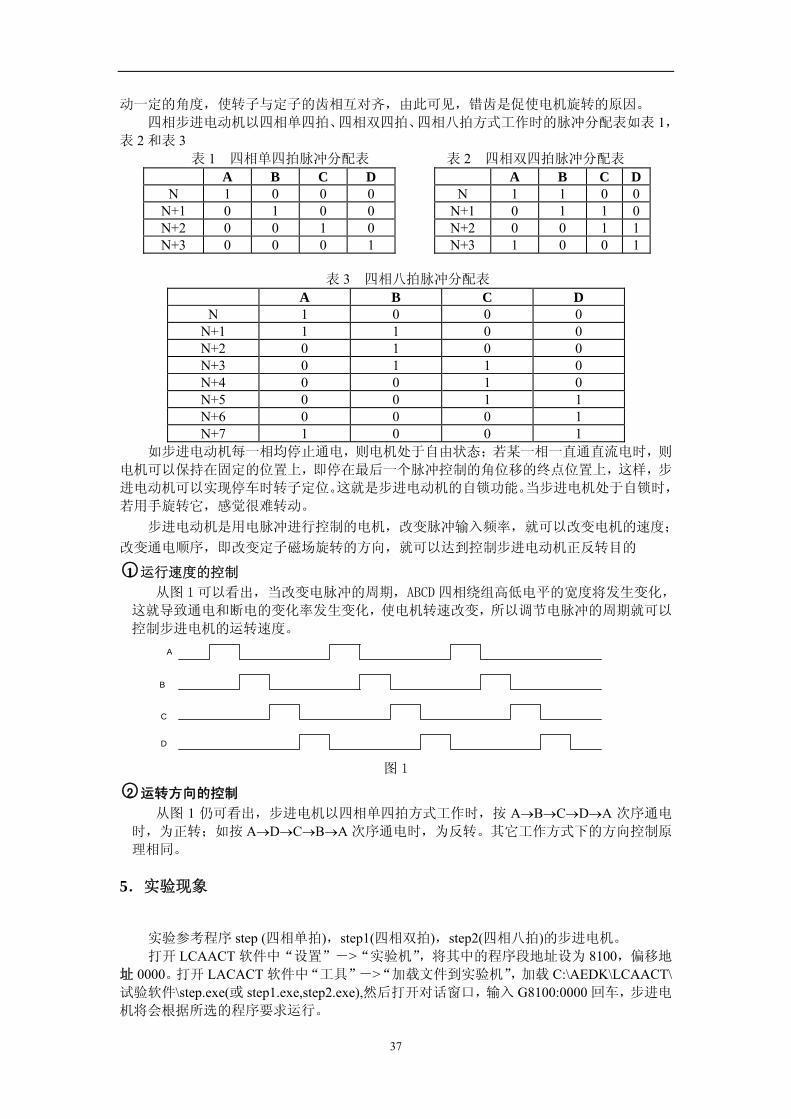
动一定的角度,使转子与定子的齿相互对齐,由此可见,错齿是促使电机旋转的原因。 四相步进电动机以四相单四拍、四相双四拍、四相八拍方式工作时的脉冲分配表如表 1,表 2 和表 3
表 1 四相单四拍脉冲分配表 表 2 四相双四拍脉冲分配表 A B C D A B C D
N 1 0 0 0 N 1 1 0 0 N+1 0 1 0 0 N+1 0 1 1 0 N+2 0 0 1 0 N+2 0 0 1 1 N+3 0 0 0 1 N+3 1 0 0 1
表 3 四相八拍脉冲分配表
A B C D N 1 0 0 0
N+1 1 1 0 0 N+2 0 1 0 0 N+3 0 1 1 0 N+4 0 0 1 0 N+5 0 0 1 1 N+6 0 0 0 1 N+7 1 0 0 1
如步进电动机每一相均停止通电,则电机处于自由状态;若某一相一直通直流电时,则
电机可以保持在固定的位置上,即停在 后一个脉冲控制的角位移的终点位置上,这样,步
进电动机可以实现停车时转子定位。这就是步进电动机的自锁功能。当步进电机处于自锁时,
若用手旋转它,感觉很难转动。 步进电动机是用电脉冲进行控制的电机,改变脉冲输入频率,就可以改变电机的速度;
改变通电顺序,即改变定子磁场旋转的方向,就可以达到控制步进电动机正反转目的
1 运行速度的控制 从图 1 可以看出,当改变电脉冲的周期,ABCD 四相绕组高低电平的宽度将发生变化,
这就导致通电和断电的变化率发生变化,使电机转速改变,所以调节电脉冲的周期就可以
控制步进电机的运转速度。
A
B
C
D
图 1
2 运转方向的控制
从图 1 仍可看出,步进电机以四相单四拍方式工作时,按 A→B→C→D→A 次序通电
时,为正转;如按 A→D→C→B→A 次序通电时,为反转。其它工作方式下的方向控制原
理相同。
5.实验现象
实验参考程序 step (四相单拍),step1(四相双拍),step2(四相八拍)的步进电机。 打开 LCAACT 软件中“设置”->“实验机”,将其中的程序段地址设为 8100,偏移地
址 0000。打开 LACACT 软件中“工具”->“加载文件到实验机”,加载 C:\AEDK\LCAACT\试验软件\step.exe(或 step1.exe,step2.exe),然后打开对话窗口,输入 G8100:0000 回车,步进电
机将会根据所选的程序要求运行。
37
实验十一 直流电机闭环调速实验
1.实验要求
编写程序,实现直流电机闭环调速,使速度稳定在某一给定值上。
2.实验目的
1·巩固闭环控制系统的基本概念。 2·了解闭环控制系统中反馈量的引入方法。 3·掌握 PID 算法数字化的方法和编程。
3.电路及接线
实验连线 将 C1 部分的 V 与 IRQ6(J1 下部)相连,将 OUT2(J1 的下部)和 IRQ7 相连。
实验时请保证扩展平台正确连接。ADC0832 的偏选地址为 00H。
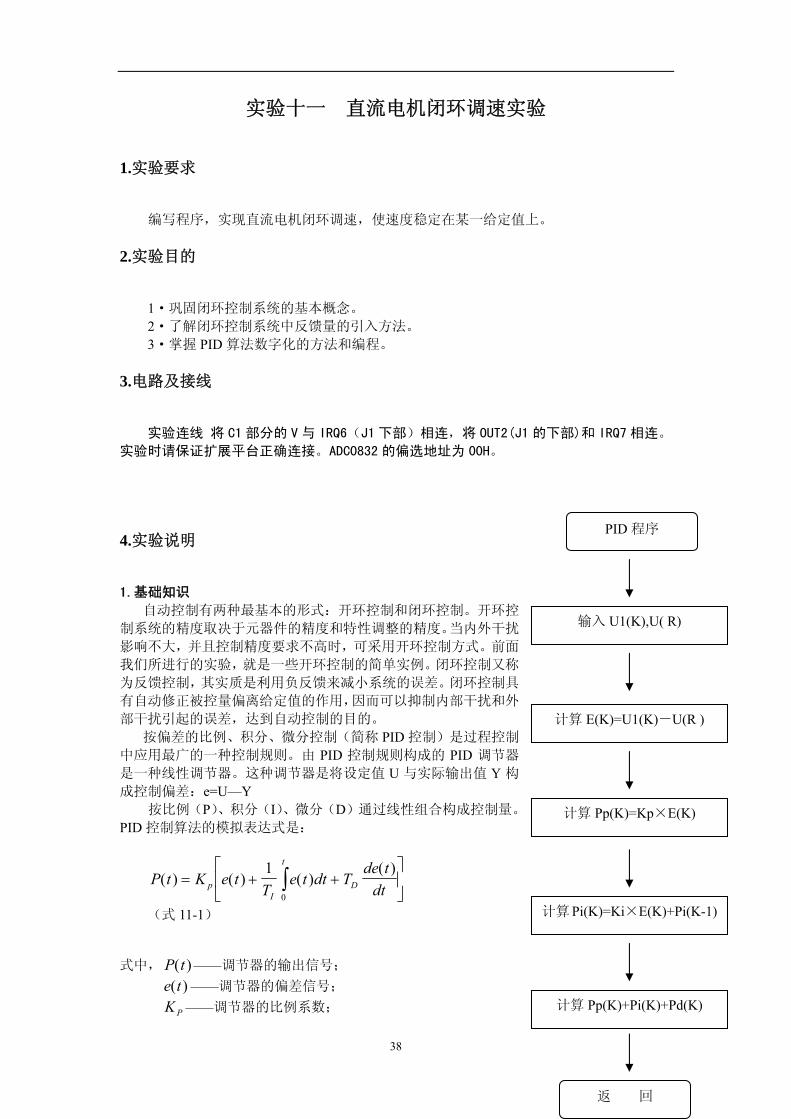
PID 程序
输入 U1(K),U( R)
4.实验说明
计算 E(K)=U1(K)-U(R )
计算 Pp(K)=Kp×E(K)
计算Pi(K)=Ki×E(K)+Pi(K-1)
1.基础知识
自动控制有两种 基本的形式:开环控制和闭环控制。开环控
制系统的精度取决于元器件的精度和特性调整的精度。当内外干扰
影响不大,并且控制精度要求不高时,可采用开环控制方式。前面
我们所进行的实验,就是一些开环控制的简单实例。闭环控制又称
为反馈控制,其实质是利用负反馈来减小系统的误差。闭环控制具
有自动修正被控量偏离给定值的作用,因而可以抑制内部干扰和外
部干扰引起的误差,达到自动控制的目的。 按偏差的比例、积分、微分控制(简称 PID 控制)是过程控制
中应用 广的一种控制规则。由 PID 控制规则构成的 PID 调节器
是一种线性调节器。这种调节器是将设定值 U 与实际输出值 Y 构
成控制偏差:e=U—Y 按比例(P)、积分(I)、微分(D)通过线性组合构成控制量。
PID 控制算法的模拟表达式是:
P t K e tT
e t dt Tde tdtp
ID
t
( ) ( ) ( )( )
= + +⎡
⎣⎢
⎤
⎦⎥∫
1
0
(式 11-1) 式中, ——调节器的输出信号; P t( ) e t ——调节器的偏差信号; ( )
计算 Pp(K)+Pi(K)+Pd(K) K ——调节器的比例系数; P
38
返 回
TI ——调节器的积分时间; T ——调节器的微分时间; D
在实际应用中,根据对象特征和控制要求,也可灵活改变其结构,取其一部分构成控制
规律,例如:比例(P)调节器、比例积分(PI)调节器、比例微分调节器(PD)等。 比例调节器是一种 简单的调节器。它具有反应快、无滞后的特点,能干扰,使被控参
数稳定在给定值附近。但是,对于具有自平衡系统(即系统阶跃响应为一有限值)的被控对
象存在静差。对于某一给定系统,当负荷变化时,静差大小与比例作用的强弱有关。加大比
例系数可以减小静差,但KP过大时,会使动态质量变差,引起控制量振荡甚至导致闭死不
稳定。 比例积分调节器是在比例调节器的基础上增加积分调节规律。积分调节规律的实质是调
节器输出的变化速度与输入偏差的大小成正比。只要有偏差,调节器输出的调节信号就不断
变化,执行器就不断动作,直至偏差信号消除。因此,积分作用能消除比例调节器的静差。
但是积分调节动作缓慢,其调节作用总是滞后于偏差信号的变化。 在上述 PI 调节器的基础上再加上微分调节环节就构成了 PID 调节器。微分调节作用可
以克服积分调节作用缓慢性,避免积分作用可能降低系统响应速度的缺点。另外,微分调节
的加入有助于减小超调、克服振荡,改善系统的动态性能。 在实际应用中,PID 调节器的实现分模拟和数字模拟两种方法。模拟法就是利用硬件电
路实现 PID 调节规律。PID 数字模拟法就是对经典的模拟 PID 进行数字模拟,用数字调节
器来代替模拟调节器。在采样周期较小时,数字模拟 PID 控制算法是一种较理想的控制算
法。
2.PID 算法的数字实现
由于 DDC(Direct Digital Control)系统是一种时间离散控制系统。因此,为了用微机
实现(式 11-1)必须将其离散化, 用数字形式的差分方程来代替连续系统的微分方程。离散化的 PID 表达式为:
[⎭⎬⎫
⎩⎨⎧
−−++= ∑=
n
j
D
IP nene
TTje
TTneKnP
0)1()()()()( ] (式 11-2)
式中,T ——采样周期; ——第 n 次采样时微机输出; P n( )e n( ) ——第 n 次采样时的偏差值;
e n ——第 n-1 次采样时的偏差值; ( −1) n——采样序号,n=0,1,2,…。
通常把(式 11-2)称为 PID 的位置控制算式。根据(式 11-2)可以进一步推导出离散
化的位置型 PID 编程表达式,如(式 11-3):
第 K 次采样 PID 的输出式为: P K P K P K P KP I D( ) ( ) ( ) ( )= + + (式 11-3)
其中,设
[ ]⎪⎪⎩
⎪⎪⎨
⎧
−−=
−+=+==
=
∑∑==
)1()()(
)1()()()()()(
)()(
00
KEKEKKP
KPKEKjeKKEKjEKKP
KEKKP
DD
K
jIIII
K
jII
PP
式中,K
TTK
KTTK
II
P
DD
P
= − − − −
= − − − −
积分系数;
微分系数。
确定了 的值后,实现(式 11-3)的编程框图如右图所示:由(式 11-3)K K KP I D, 和
39
还可得离散化的位置型 P 控制和 PI 控制的编程表达式。它们各自的编程框图也只需在该图
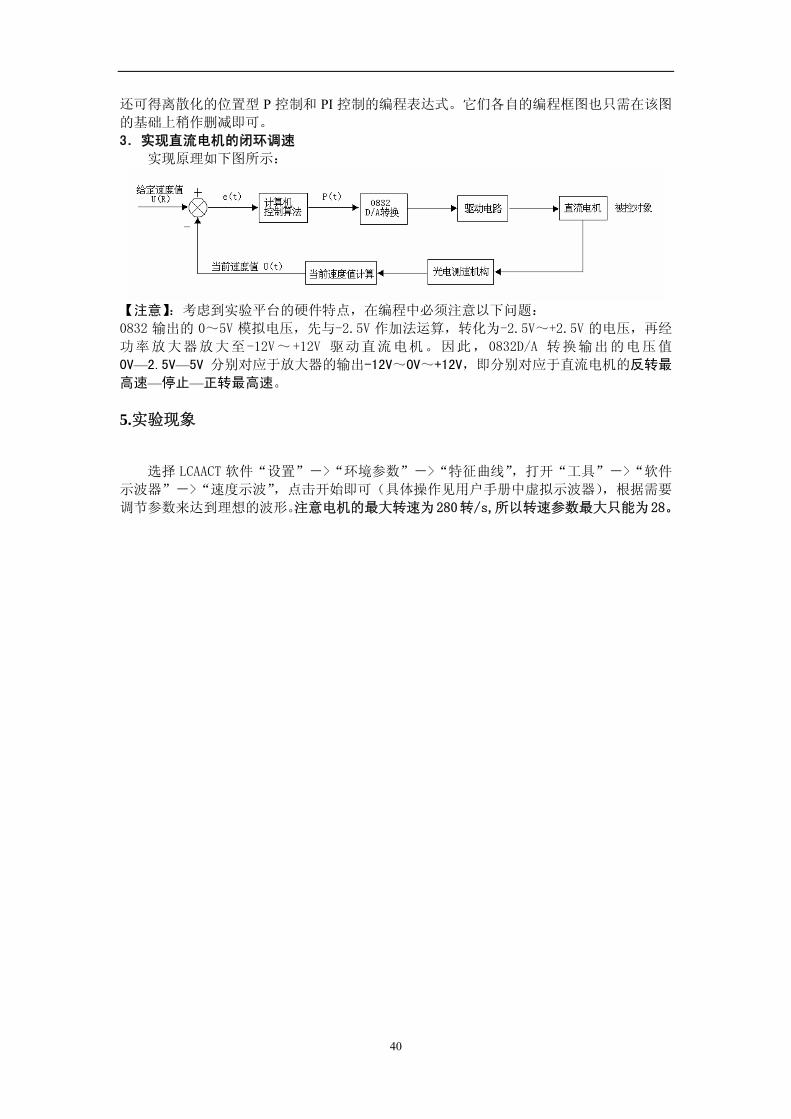
的基础上稍作删减即可。 3.实现直流电机的闭环调速
实现原理如下图所示:
【注意】:考虑到实验平台的硬件特点,在编程中必须注意以下问题:
0832 输出的 0~5V 模拟电压,先与-2.5V 作加法运算,转化为-2.5V~+2.5V 的电压,再经
功率放大器放大至-12V~+12V 驱动直流电机。因此,0832D/A 转换输出的电压值
0V—2.5V—5V 分别对应于放大器的输出-12V~0V~+12V,即分别对应于直流电机的反转最
高速—停止—正转最高速。
5.实验现象
选择 LCAACT 软件“设置”->“环境参数”->“特征曲线”,打开“工具”->“软件
示波器”->“速度示波”,点击开始即可(具体操作见用户手册中虚拟示波器),根据需要
调节参数来达到理想的波形。注意电机的 大转速为280转/s,所以转速参数 大只能为28。
40
实验十二 随动系统的 PID 控制
一、实验目的
1. 了解 PID 控制的基本理论、基本方法;
2. 掌握 PID 算法的 Matlab 程序仿真;
3. 掌握伺服系统 PID 控制的仿真方法。
二、实验设备
计算机,Matlab 仿真软件
三、实验步骤与内容
3.1 实验原理
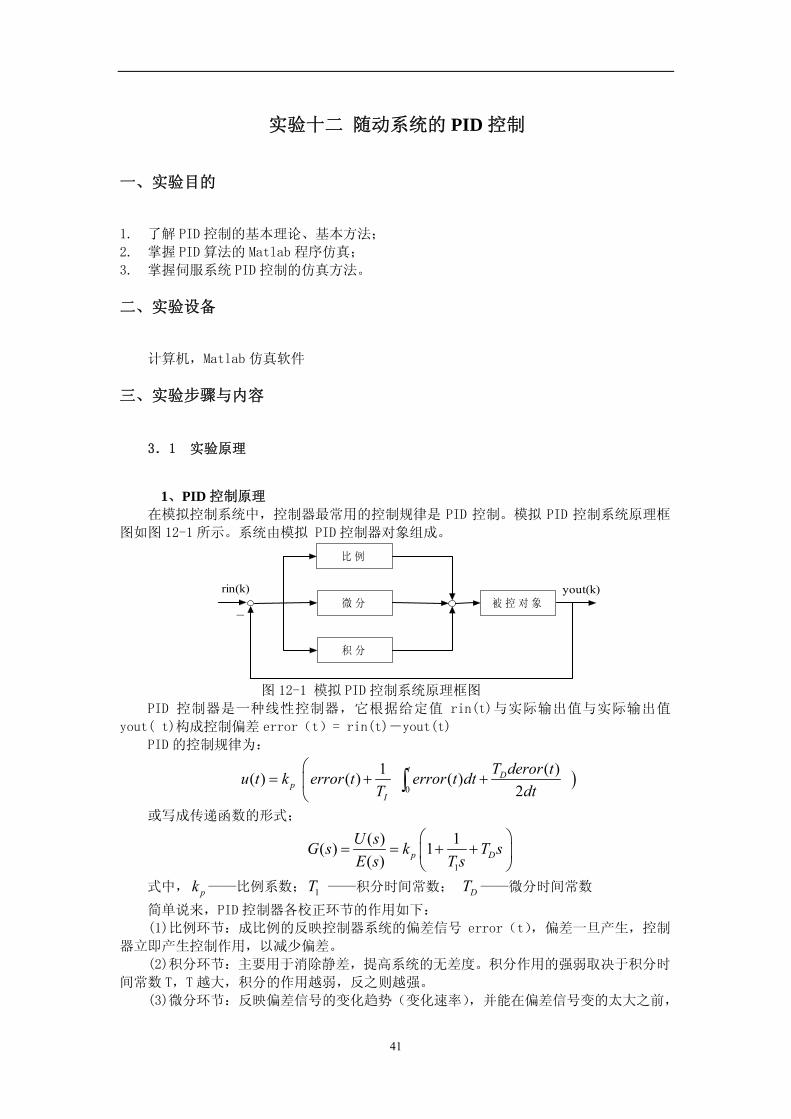
1、PID 控制原理 在模拟控制系统中,控制器 常用的控制规律是 PID 控制。模拟 PID 控制系统原理框
图如图 12-1 所示。系统由模拟 PID 控制器对象组成。
比 例
积 分
微 分 被 控 对 象
rin(k)
-
yout(k)
图 12-1 模拟 PID 控制系统原理框图
PID 控制器是一种线性控制器,它根据给定值 rin(t)与实际输出值与实际输出值
yout( t)构成控制偏差 error(t)= rin(t)-yout(t)
PID 的控制规律为:
)0
( )1( ) ( ) ( )2
tD
pI
T deror tu t k error t error t dtT d
⎛= + +⎜
⎝∫ t
或写成传递函数的形式;
1
( ) 1( ) 1( ) p D
U sG s k T sE s T s
⎛ ⎞= = + +⎜ ⎟
⎝ ⎠
式中, ——比例系数; ——积分时间常数; pk 1T DT ——微分时间常数
简单说来,PID 控制器各校正环节的作用如下:
(1)比例环节:成比例的反映控制器系统的偏差信号 error(t),偏差一旦产生,控制
器立即产生控制作用,以减少偏差。
(2)积分环节:主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时
间常数 T,T越大,积分的作用越弱,反之则越强。
(3)微分环节:反映偏差信号的变化趋势(变化速率),并能在偏差信号变的太大之前,
41

在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。
2、数字 PID 控制
计算机控制是一种采样控制,它只能根据采样时刻的偏差值计算控制量。因此,连续
PID 控制算法不能直接使用,需要采用离散化方法。在计算机 PID 控制中,使用的是数字
PID 控制器。
位置式 PID 控制算法
按 PID 控制算法,以一系列的采样时刻点 kT 代表连续时间 t,以矩形法数值积分近似
代替积分,以一阶后向差分近似代替微分,即:
00 0
( 0,1,2.....)( ) ( ) ( 1) ( ) ( 1)
( ) ( ) ( )k kt
j j
t kT kderror t error kT error k T error k error kdt T T
error t dt T error jT T error j= =
⎧ ⎫⎪ ⎪≈ =⎪ ⎪
− − − −⎪ ⎪≈ =⎨ ⎬⎪ ⎪⎪ ⎪
≈ =⎪ ⎪⎩ ⎭
∑ ∑∫
可得离散表达式:
01
0
( ) ( ( ) ( ) ( ( ) ( 1)))
( ) ( 1)( ) ( )
kD
pj
k
p i dj
TTu k k error k error j error k error kT T
error k error kk error k k error j T kT
=
=
= + + −
− −= + +
∑
∑
−
式中,1
pi
kk
T= , ,T为采样周期,k 为采样序号,k=1,2,……,error(k-1)
和 error(k)分别为第(k-1)项的第 k 时刻所得的偏差信号。
d pk k T= d
位置式 PID 控制系统如 12-2 图所示。
D/APID控制算法 被 控 对 象
rin(k)
-
yout(k)执 行 机 构
图 12-2 位置式 PID 控制系统
在仿真过程中,可根据实际情况,对控制器的输出进行限幅:[-10,+10]。
上述 PID 控制算法的缺点是,由于采用全量输出,所以每次输出均与过去的状态有关,
计算时要对 error(k)量进行累加,计算机输出控制量 u(k)对应的是执行机构的实际位
置偏差,如果位置传感器出现故障,u(k)可能会出现大幅度变化。u(k)的大幅度变化
会引起机构位置的大幅度变化,这种情况在生产中是不允许的,在某些重要场合还可能造
成重大事故。
增量式 PID 控制算法
当执行机构需要的是控制量的增量(例如驱动步进电机)时,应采用增量式 PID 控制。
根据递推原理可得: 1
0( 1) ( ( 1) ( ) ( ( 1) ( 2))
k
p i dj
u k k error k k error j k error k error k=
=
− = − + + − − −∑ )
增量式 PID 控制算法: ( ) ( ) ( 1)u k u k u kΔ = − −
( ) ( ( ) ( 1) ( ( ) 2 ( 1) ( 2))p i du k k error k error k k error k error k error k error kΔ = − − + + − − + −
根据增量式 PID 控制算法,设计仿真程序。
由于控制算法中不需要累加,控制增量 u(k)仅与 近 k 次的采样有关,所以误动作时
影响小,而且较容易通过加权处理获得比较好的控制效果。
在计算机控制系统中,PID 控制是通过计算机程序实现的,因此它的灵活性很大。一些
42
原来在模拟 PID 控制器中无法实现的问题,在引入计算机后,就可以得到解决,于是产生了
一系列的改进算法,形成非标准的控制算法,以改善系统品质,满足不同控制系统的需求。
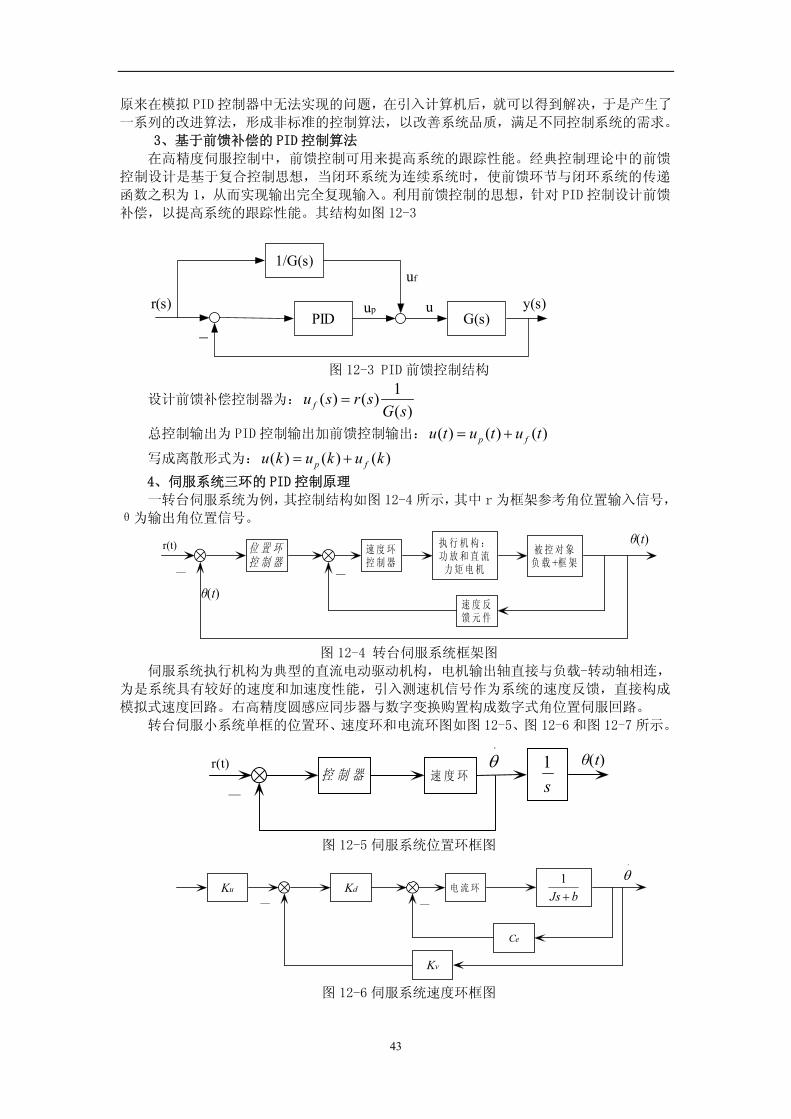
3、基于前馈补偿的 PID 控制算法
在高精度伺服控制中,前馈控制可用来提高系统的跟踪性能。经典控制理论中的前馈
控制设计是基于复合控制思想,当闭环系统为连续系统时,使前馈环节与闭环系统的传递
函数之积为 1,从而实现输出完全复现输入。利用前馈控制的思想,针对 PID 控制设计前馈
补偿,以提高系统的跟踪性能。其结构如图 12-3
PID
1/G(s)
G(s)r(s)
-
y(s)up
uf
u
图 12-3 PID 前馈控制结构
设计前馈补偿控制器为:1( ) ( )( )fu s r sG s
=
总控制输出为 PID 控制输出加前馈控制输出: ( ) ( ) ( )p fu t u t u t= +
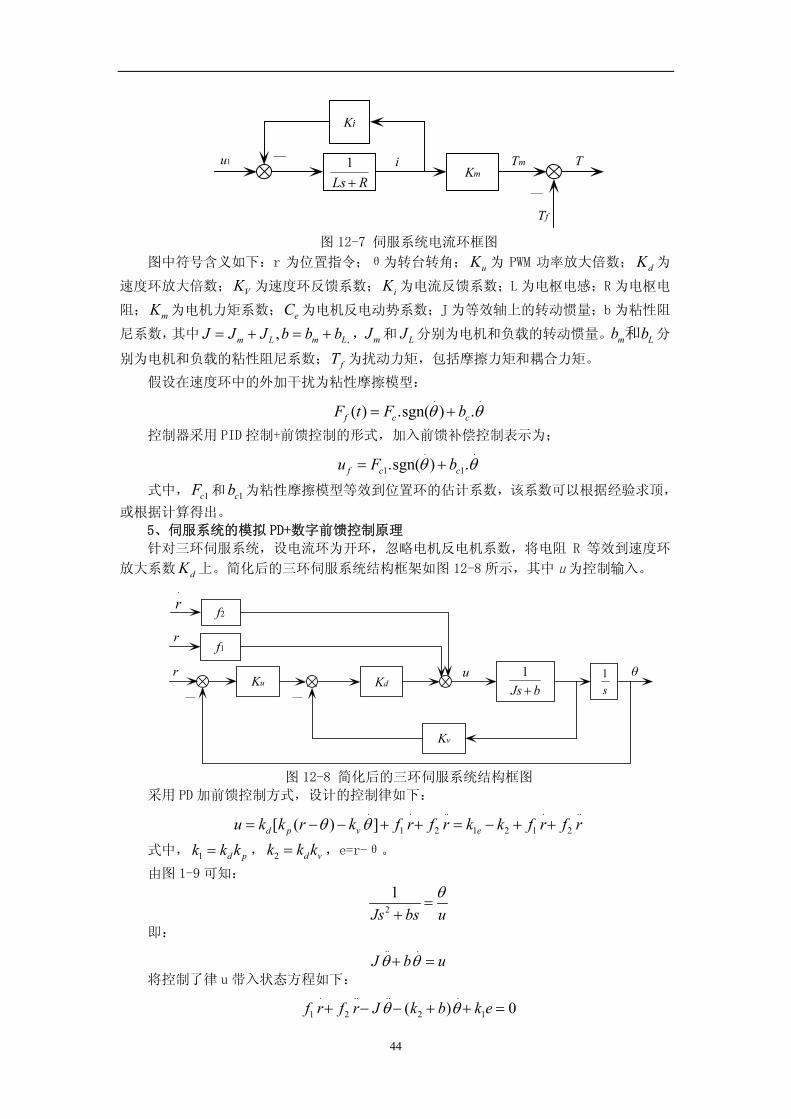
写成离散形式为: ( ) ( ) ( )p fu k u k u k= +4、伺服系统三环的 PID 控制原理
一转台伺服系统为例,其控制结构如图 12-4 所示,其中 r 为框架参考角位置输入信号,
θ为输出角位置信号。
位 置 环控 制 器
速度环控制器
被控对象负载 +框架
执行机构:功放和直流力矩电机
速度反馈元件
r(t)
θ(t)—
θ(t)
—
图 12-4 转台伺服系统框架图
伺服系统执行机构为典型的直流电动驱动机构,电机输出轴直接与负载-转动轴相连,
为是系统具有较好的速度和加速度性能,引入测速机信号作为系统的速度反馈,直接构成
模拟式速度回路。右高精度圆感应同步器与数字变换购置构成数字式角位置伺服回路。
转台伺服小系统单框的位置环、速度环和电流环图如图 12-5、图 12-6 和图 12-7 所示。
控 制 器 速度环r(t)
— s1 θ(t)
⋅
θ
图 12-5 伺服系统位置环框图
Kd 电流环
Ce
——Ku
bJs +1
⋅
θ
Kv
图 12-6 伺服系统速度环框图
43
Km—
Ki
RLs +1u1 i
—
Tm
Tf
T
图 12-7 伺服系统电流环框图
图中符号含义如下:r 为位置指令;θ为转台转角; 为 PWM 功率放大倍数; 为
速度环放大倍数; 为速度环反馈系数; 为电流反馈系数;L为电枢电感;R 为电枢电
阻; 为电机力矩系数; 为电机反电动势系数;J为等效轴上的转动惯量;b 为粘性阻
尼系数,其中
uK dK
VK iK
mK eC
,,m L m LJ J J b b b= + = + , 和 分别为电机和负载的转动惯量。 分
别为电机和负载的粘性阻尼系数;
mJ LJ m Lb b和
fT 为扰动力矩,包括摩擦力矩和耦合力矩。
假设在速度环中的外加干扰为粘性摩擦模型: . .
( ) .sgn( ) .f c cF t F bθ θ= +
控制器采用 PID 控制+前馈控制的形式,加入前馈补偿控制表示为; . .
1 1.sgn( ) .f c cu F bθ θ= +
式中, 和 为粘性摩擦模型等效到位置环的估计系数,该系数可以根据经验求顶,
或根据计算得出。
1cF 1cb
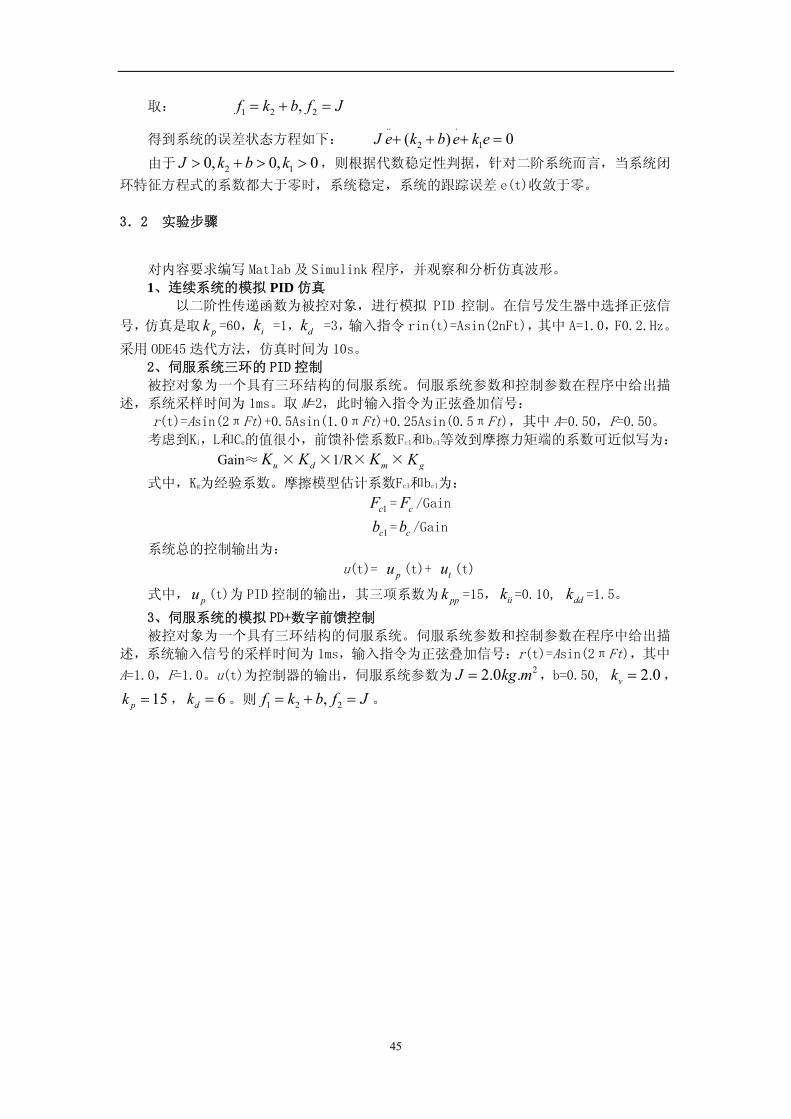
5、伺服系统的模拟 PD+数字前馈控制原理
针对三环伺服系统,设电流环为开环,忽略电机反电机系数,将电阻 R 等效到速度环
放大系数 上。简化后的三环伺服系统结构框架如图 12-8 所示,其中 u为控制输入。 dK
Kdθ
—Ku
bJs +1
Kv
u
f2
f1
s1r
r
⋅
r
—
图 12-8 简化后的三环伺服系统结构框图
采用 PD 加前馈控制方式,设计的控制律如下: . . .. .
1 2 1 2 1 2[ ( ) ]d p v eu k k r k f r f r k k f r f rθ θ= − − + + = − + +..
式中, , ,e=r-θ。 1 d pk k k= 2 d vk k k=由图 1-9 可知:
2
1Js bs u
θ=
+
即: .. .
J bθ θ u+ =
将控制了律 u 带入状态方程如下: . .. .. .
1 2 2 1( )f r f r J k b k eθ θ+ − − + + = 0
44
取: 1 2 2,f k b f J= + =
0得到系统的误差状态方程如下: .. .
2 1( )J e k b e k e+ + + =
由于 ,则根据代数稳定性判据,针对二阶系统而言,当系统闭
环特征方程式的系数都大于零时,系统稳定,系统的跟踪误差 e(t)收敛于零。
2 10, 0, 0J k b k> + > >
3.2 实验步骤
对内容要求编写 Matlab 及 Simulink 程序,并观察和分析仿真波形。
1、连续系统的模拟 PID 仿真 以二阶性传递函数为被控对象,进行模拟 PID 控制。在信号发生器中选择正弦信
号,仿真是取 =60, =1, =3,输入指令 rin(t)=Asin(2nFt),其中 A=1.0,F0.2.Hz。
采用 ODE45 迭代方法,仿真时间为 10s。
pk ik dk
2、伺服系统三环的 PID 控制
被控对象为一个具有三环结构的伺服系统。伺服系统参数和控制参数在程序中给出描
述,系统采样时间为 1ms。取 M=2,此时输入指令为正弦叠加信号:
r(t)=Asin(2πFt)+0.5Asin(1.0πFt)+0.25Asin(0.5πFt),其中 A=0.50,F=0.50。
考虑到Ki,L和Ce的值很小,前馈补偿系数Fc1和bc1等效到摩擦力矩端的系数可近似写为:
Gain≈ × ×1/R× ×uK dK mK gK
式中,Kg为经验系数。摩擦模型估计系数Fc1和bc1为:
1cF = /Gain cF
1cb = /Gain cb系统总的控制输出为:
u(t)= (t)+ (t) pu tu式中, (t)为 PID 控制的输出,其三项系数为 =15, =0.10, =1.5。 pu ppk iik ddk3、伺服系统的模拟 PD+数字前馈控制
被控对象为一个具有三环结构的伺服系统。伺服系统参数和控制参数在程序中给出描
述,系统输入信号的采样时间为 1ms,输入指令为正弦叠加信号:r(t)=Asin(2πFt),其中
A=1.0,F=1.0。u(t)为控制器的输出,伺服系统参数为 ,b=0.50, ,
, 。则
22.0 .J kg= m 2.0vk =15pk = 6dk = 1 2 2,f k b f J= + = 。
45