Embed Size (px)
DESCRIPTION
《 过程控制系统 》 第二章 过程动态特性建模与分析. 概要. 第一章部分内容复习 简单被控过程的机理建模方法 广义对象的概念及其阶跃(或方波)测试建模法. 控制系统的基本组成. 期望值. 控制器. 末端 执行器. 传感器. 过程. 输入. 输出. 液位控制反馈控制. 液位控制系统的方块图. 问题:指出每一条连接线所对应的变量信号的物理意义与单位,以及每一个方块所表示的意义?. 一般的单回路控制系统. 被控变量 :温度 (T) 、压力 (P) 、流量 (F) 、液位或料位 (L) 、成分与物性等六大参数。. 方块图的注意事项. 正确的画法. - PowerPoint PPT Presentation
Citation preview
《过程控制系统》第二章 过程动态特性建模与分析

概要 第一章部分内容复习
简单被控过程的机理建模方法
广义对象的概念及其阶跃(或方波)测试建模法

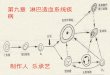
控制系统的基本组成
过程
末端执行器 传感器
控制器
输入 输出
期望值

液位控制反馈控制
LCh hsp
Qi
Qo
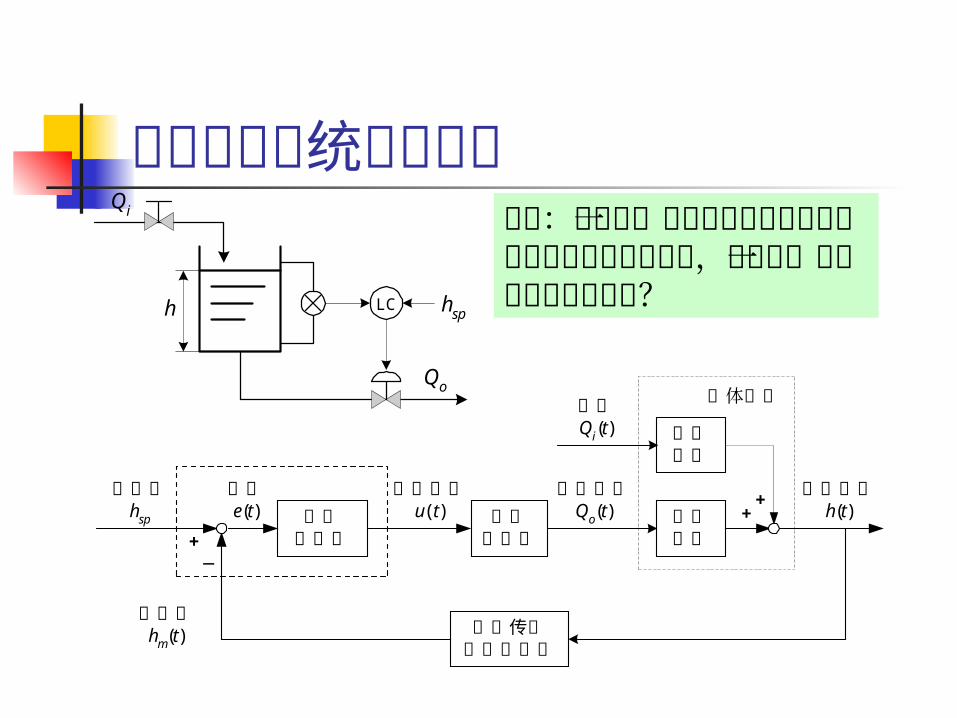
液位控制系统的方块图问题:指出每一条连接线所对应的变量信号的物理意义与单位,以及每一个方块所表示的意义?
液位控制器
设定值hsp
偏差e(t)
+_
测量值hm(t)
干扰通道
++
液位传感测量变送器
出水控制阀
被控变量h(t)
控制信号u( t)
操纵变量Qo(t) 控制
通道
扰动Qi(t)
液体贮罐
LCh hsp
Qi
Qo

一般的单回路控制系统
被控变量:温度 (T) 、压力 (P) 、流量 (F) 、液位或料位 (L) 、成分与物性等六大参数。
控制器Gc (s)
执行器Gv (s)
控制通道Gp (s)
测量变送Gm (s)
设定值ysp 偏差 e
+_
控制变量u
操纵变量q
被控变量y
测量值ym
扰动 D干扰通道
GD (s)
++
被控对象
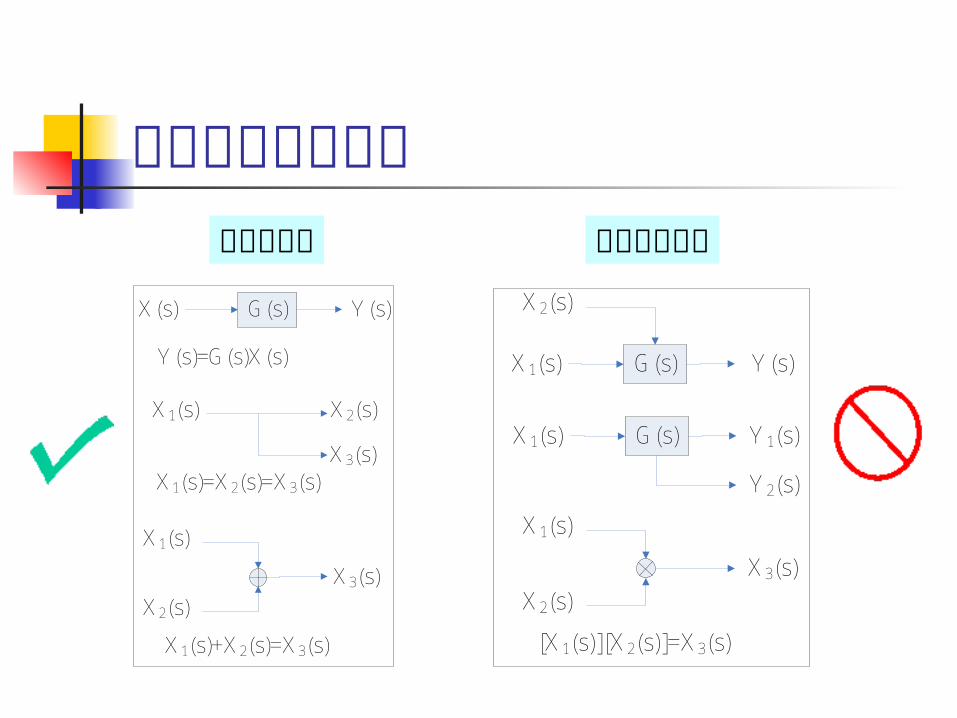
方块图的注意事项
G(s)X1(s) Y(s)
X2(s)
G(s)X1(s) Y1(s)
Y2(s)
X2(s)
X1(s)
X3(s)
[X1(s)][X2(s)]=X3(s)
G(s)X(s) Y(s)
X1(s) X2(s)
X3(s)
X2(s)
X1(s)
X3(s)
X1(s)+X2(s)=X3(s)
Y(s)=G(s)X(s)
X1(s)=X2(s)=X3(s)
正确的画法 不正确的画法

被控对象动态建模方法 机理建模
原理:根据过程的工艺机理,写出各种有关的平衡方程,如物料平衡、能量平衡等,以及反映流体流动、传热、传质等基本规律的运动方程,由此获得被控对象的动态数学模型。特点:概念明确、适用范围宽,要求对该过程机理明确。
测试建模原理:对过程的输入(包括控制变量与扰动变量)施加一定形式的激励信号,如阶跃、脉冲信号等,同时记录相关的输入输出数据,再对这些数据进行处理,由此获得对象的动态模型。特点:无需深入了解过程机理,但适用范围小,模型准确性有限。
机理建模的步骤 根据建模的对象和模型使用的目的进行
合理的假设 ; 根据过程的内在机理建立数学方程; 进行自由度分析,保证模型有解; 简化模型。

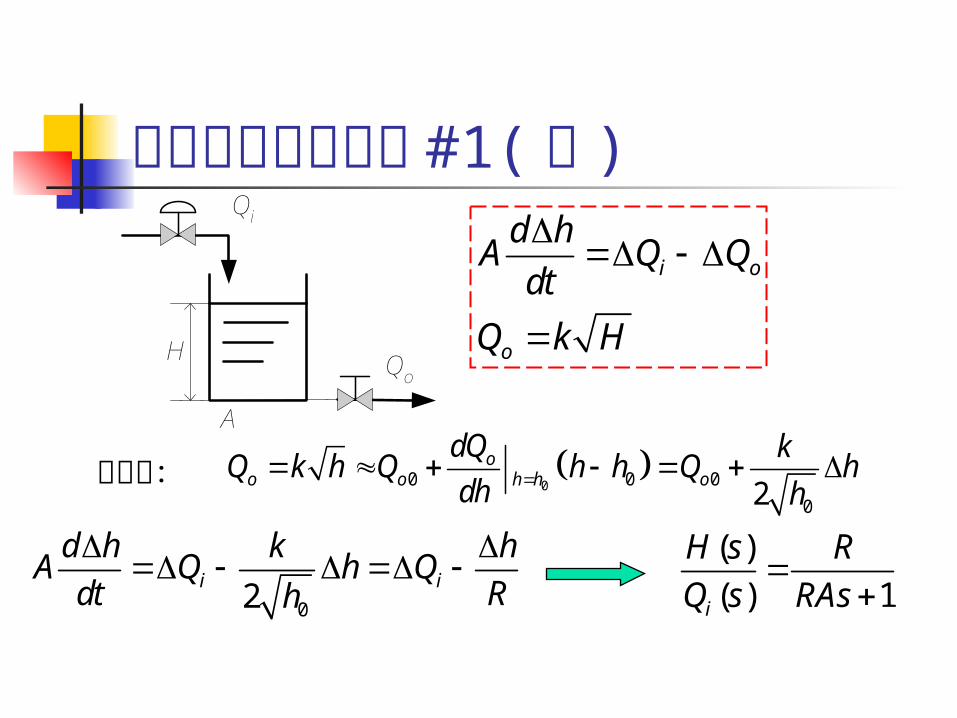
对象机理建模举例 #1( p. 28 )
0 0 0 0 00 , , ,i o i i i o o oQ Q h h h Q Q Q Q Q Q
H
Qi
Qo
A
oi QQdt
dHA
HkQo
物料平衡方程:
流体运动方程:
i o
d hA Q Q
dt
对象机理建模举例 #1(续 )
H
Qi
Qo
A
线性化: 00 0 0
02o
o o h h o
dQ kQ k h Q h h Q h
dh h
02i i
d h k hA Q h Q
dt Rh
( )
( ) 1i
H s R
Q s RAs
i o
o
d hA Q Q
dt
Q k H

一阶过程的描述 一阶过程通常的描述方式为: ( )
1
KG s
Ts
H
Qi
Qo
A
( )
( ) 1i
H s R
Q s RAs
过程增益 K
时间常数 T
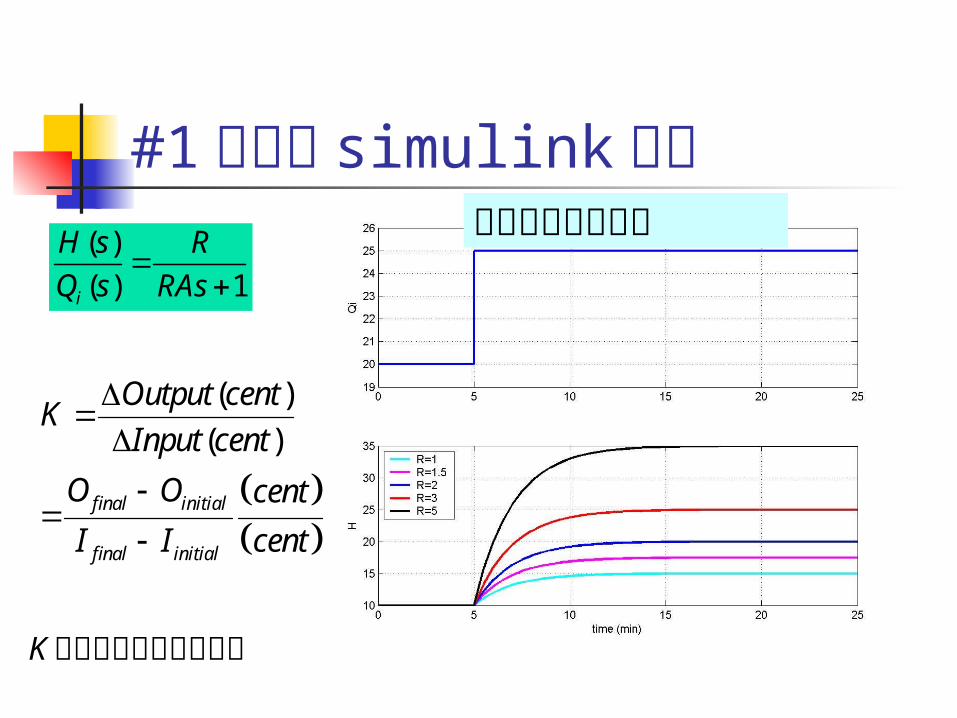
#1 举例的 simulink 仿真( )
( ) 1i
H s R
Q s RAs
无振荡的自衡过程
( )
( )
final initial
final initial
Output centK
Input cent
O O cent
I I cent
K 反映了输出变化的幅度
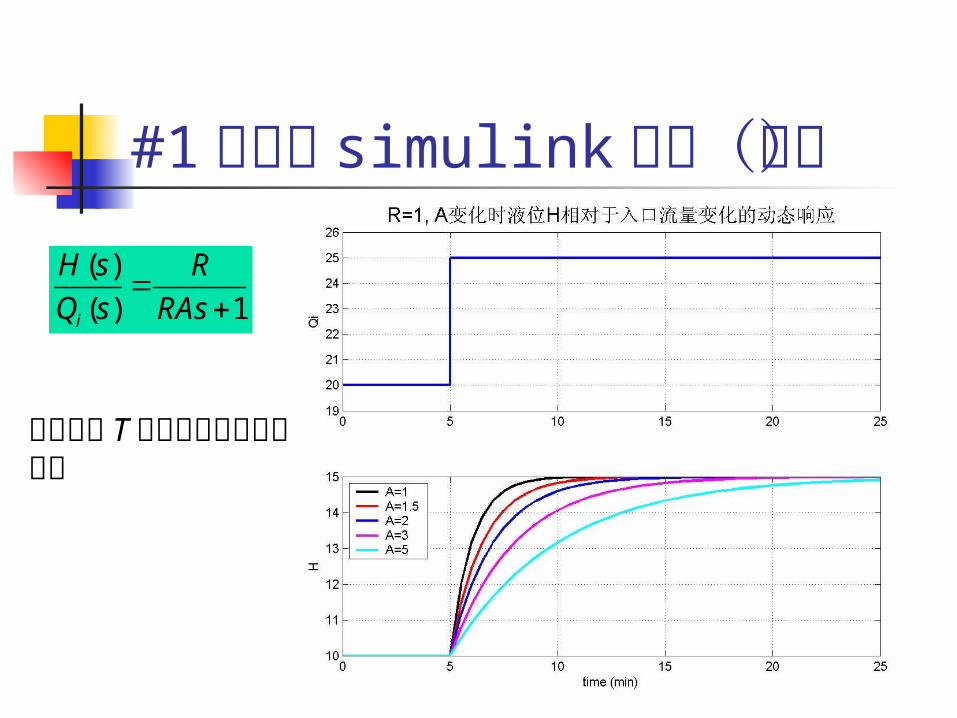
#1 举例的 simulink 仿真(续)
( )
( ) 1i
H s R
Q s RAs
时间常数 T 反映了输出变化的快慢

工程中常见的一阶对象
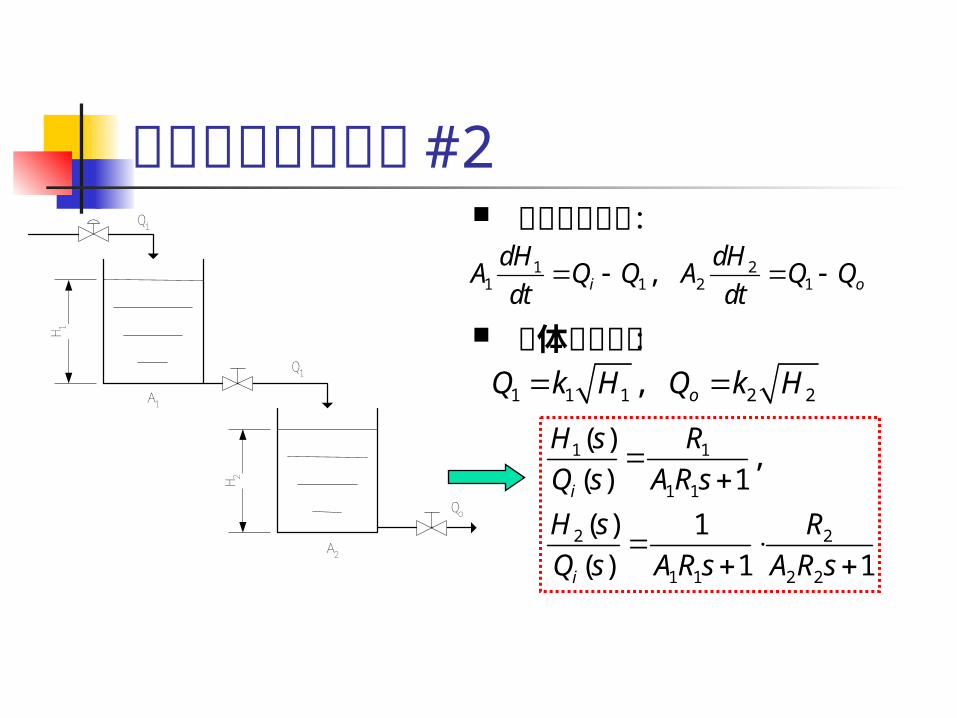
对象机理建模举例 #2
1 21 1 2 1,i o
dH dHA Q Q A Q Q
dt dt
1 1 1 2 2, oQ k H Q k H
1 1
1 1
2 2
1 1 2 2
( ),
( ) 1
( ) 1
( ) 1 1
i
i
H s R
Q s A R s
H s R
Q s A R s A R s
物料平衡方程:
流体运动方程:H 1
H 2Qi
Q1
Qo
A1
A2

#2 举例的 simulink 仿真
H 1
H 2
Qi
Q1
Qo
A1
A2
无振荡的自衡过程

高阶过程Ti (t)
T1(t)
T4(t)
T5(t)
T2(t)
0 10 20 30 40 5045
50
55
60
65
Ti(t)
0 10 20 30 40 5045
50
55
60
65
T1(t
)
0 10 20 30 40 5045
50
55
60
65
T2(t
)
0 10 20 30 40 5045
50
55
60
65
T5(t
)
Time, min
( )
( ) 1sO s K
eI s Ts
1
( )
( ) ( 1)n
ii
O s K
I s T s
1 2
( )
( ) ( 1)( 1)sO s K
eI s T s T s
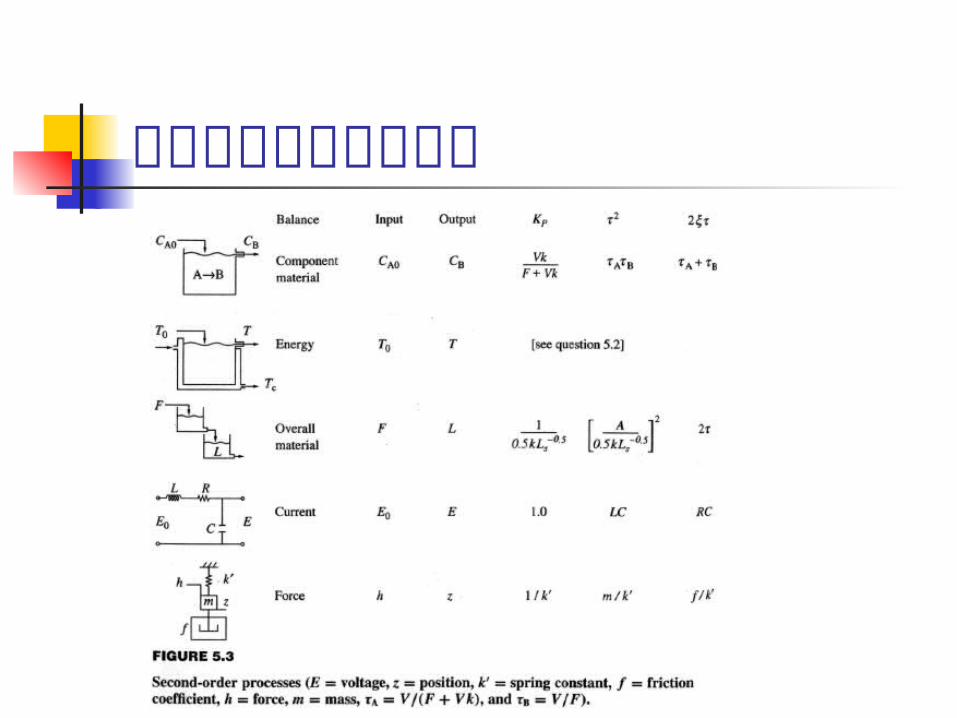
工程上常见的二阶过程

机理建模举例 #3
0QQdt
dhA i
物料平衡方程:
( ) ( )( ) i oQ s Q s
H sAs As
Qi
A Qo
无振荡的非自衡过程

工业过程控制对象的特点 除液位对象外的大多数被控对象本身是
稳定自衡对象; 对象动态特性存在不同程度的纯迟延; 对象的阶跃响应通常为单调曲线,除流
量对象外的被调量的变化相对缓慢; 被控对象往往具有非线性、不确定性与
时变等特性。

SimuLink 的使用介绍 熟悉与掌握系统所提供的 SimuLink
常用模块,如输入信号、输出显示、传递函数模块、常用数学函数等;
掌握 SimuLink 运行数据与 Matlab 数据平台的联结,以及 Matlab 常用的作图方法;
掌握子系统的封装技术;
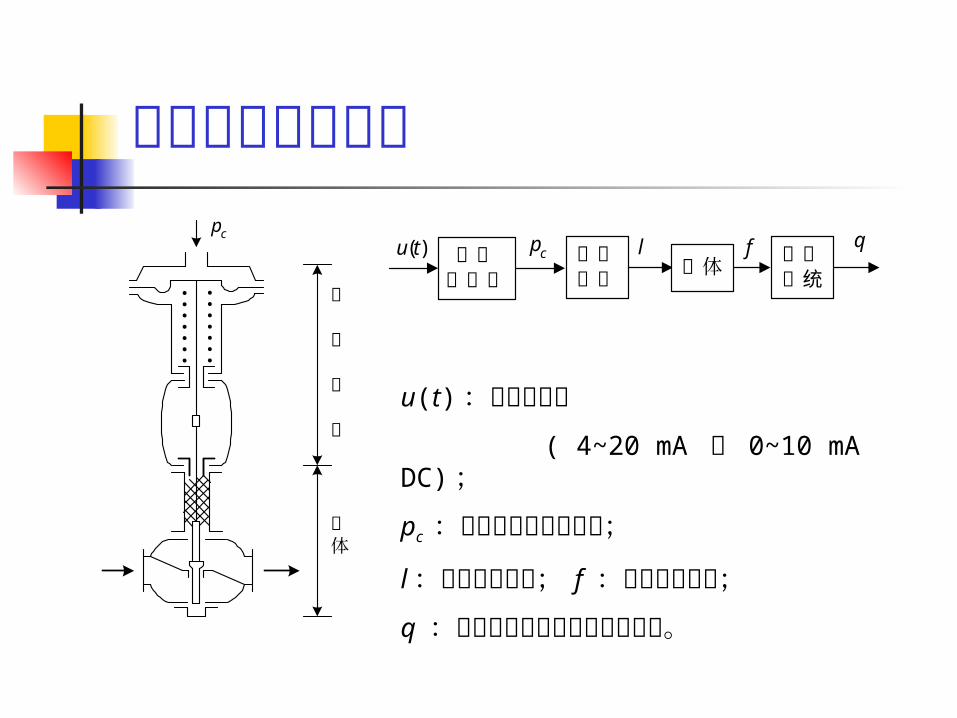
气动调节阀的结构
u(t) :控制器输出
( 4~20 mA 或 0~10 mA DC);
pc :调节阀气动控制信号;
l :阀杆相对位置; f :相对流通面积;
q :受调节阀影响的管路相对流量。
执行机构
电气转换器
阀体 管路系统
u(t) pc l f q
执
行
机
构
阀体
..............
pc
阀门的“气开”与“气关”1. 气开阀与气关阀 * 气开阀: pc↑→ f↑ (“ 有气则开” )
* 气关阀: pc↑→ f↓ (“ 有气则关” )
无气源 ( pc = 0 ) 时,气开阀全关,气关阀全开。
2. 气开阀与气关阀的选择原则 * 若无气源时,希望阀全关,则应选择气开阀,如加热炉瓦斯气调节阀;若无气源时,希望阀全开,则应选择气关阀,如加热炉进风蝶阀。

调节阀的气开气关选择
出料
进料
冷却剂
TCTC
进料
出料
燃料
T
Tm
Tsp
Rf
u
调节阀的理想流量特性100
80
60
40
20
0 20 40 60 80 100
3.3
f ×10
0l × 100
1
2
4
3
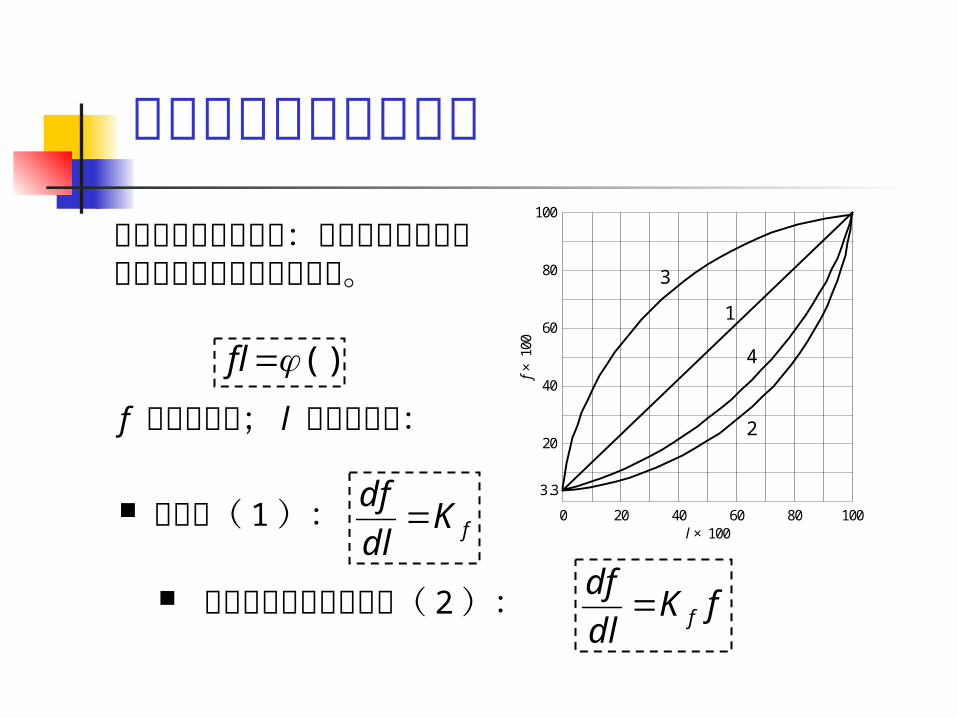
调节阀理想流量特性:通过控制阀的流量和阀门开度之间的函数关系。
( )f l
f 为相对流量; l 为相对开度:
线性阀( 1 ): fKdl
df
等百分比阀或称对数阀( 2 ): fKdl
dff

调节阀的工作流量特性分析
阀阻比 S100 :调节阀全开时的两端压降与系统总压降之比,即
100
100
100100
1
1
pppp
pS
ee
pS
ep Δ p pSp
ep
0 Q
p

调节阀工作流量特性(续)
100
80
60
40
20
0 20 40 60 80 100
3.3
q ×
100
l × 100
S100= 1
0.75
0.50
0.20
100
80
60
40
20
0 20 40 60 80 100
3.3
q ×
100
l × 100
S100= 1
0.80
0.50
0.20
线性阀的特性变异 对数阀的特性变异
Ll
QQKv /
/ max
调节阀流量特性总结
线性阀:在理想情况下,调节阀的放大增益 Kv 与阀门开度无关;而随着管路系统阀阻比的减少,当开度到达 50 ~ 70% 时,流量已接近其全开时的数值,即 Kv随着开度的增大而显著下降。 对数阀:在理想情况下,调节阀的放大增益 Kv随着阀门开度的增大而增加;而随着管路系统阀阻比的减少, Kv 渐近于常数。

调节阀流量特性的选择
选择原则:
仅当对象特性近似线性而且阀阻比大于 0. 60 以上(即调节阀两端的压差基本不变),才选择线性阀,如液位控制系统;其他情况大都应选择对数阀。

“广义对象”的概念
控制器GC (s)
执行器GV (s)
控制通道GP (s)
测量变送Gm (s)
ysp(t)
+_
u(t) q(t)
扰动D(t)
干扰通道GD (s)
++
广义对象
y(t)
ym (t)
特点:( 1 )使控制系统的设计与分析简化; ( 2 )广义对象的输入输出通常可测量,以便于
测试其动态特性; ( 3 )只关心某些特定的输入输出变量。
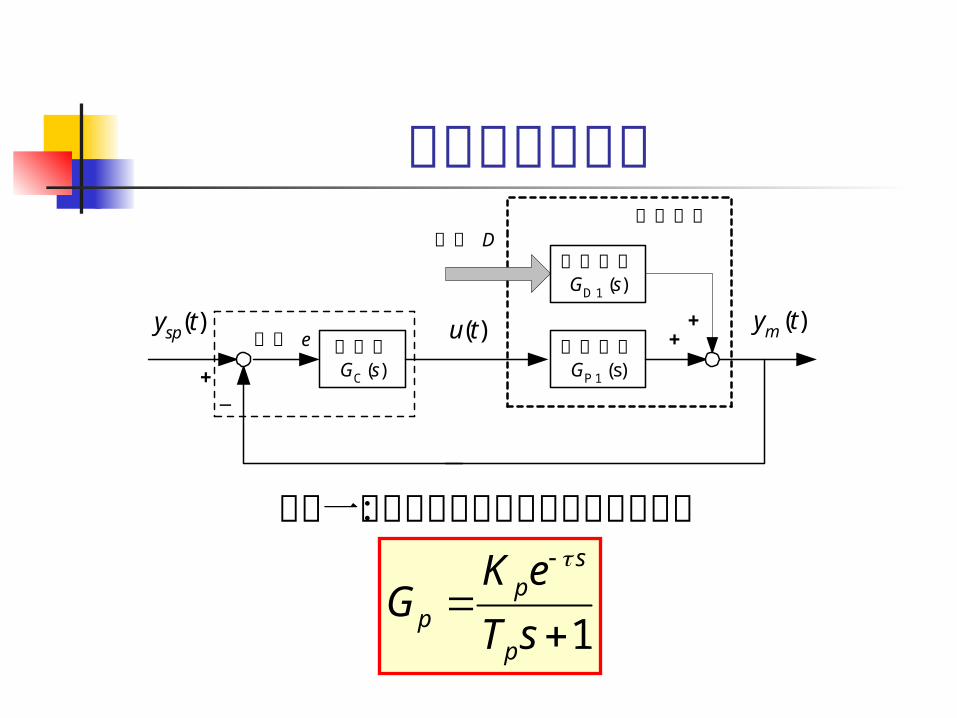
广义对象的描述
控制器GC (s)
控制通道GP 1 (s)
偏差 e
+_
扰动 D干扰通道GD 1 (s)
++
广义对象
ysp(t) ym (t)u(t)
1
sp
pp
K eG
T s
可用一阶加纯滞后模型来描述广义对象:

过程增益的计算
(20 25)T/hr
(12 10)mA
T/hr2.5
mA
final init
p
final init
y yK
u u
1
sp
pp
K eG
T s
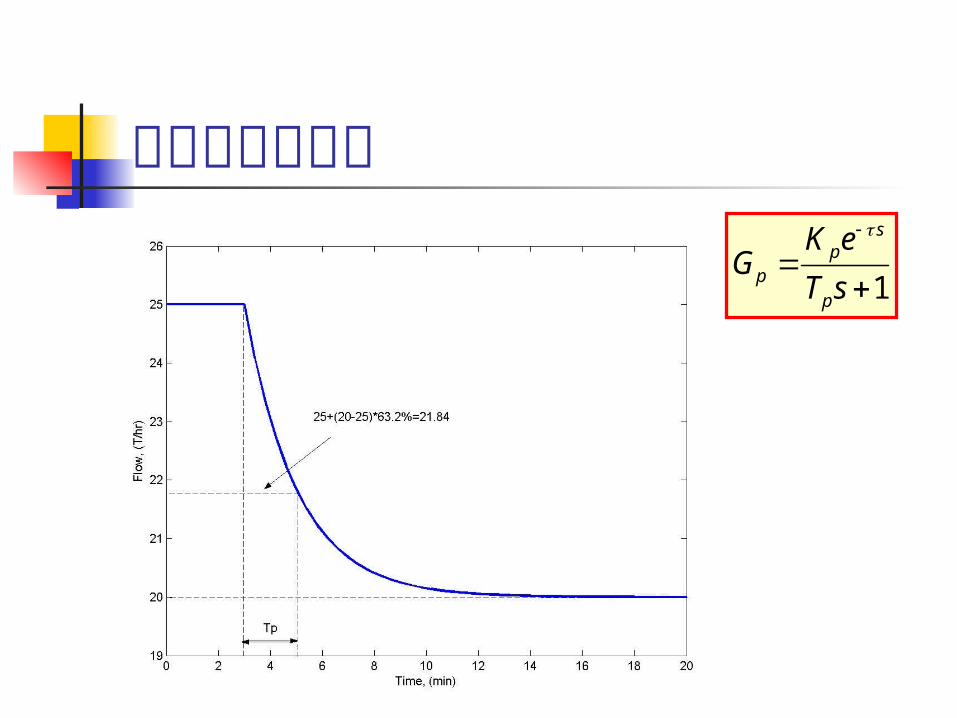
过程的时间常数
1
sp
pp
K eG
T s

过程的时间滞后
1
sp
pp
K eG
T s
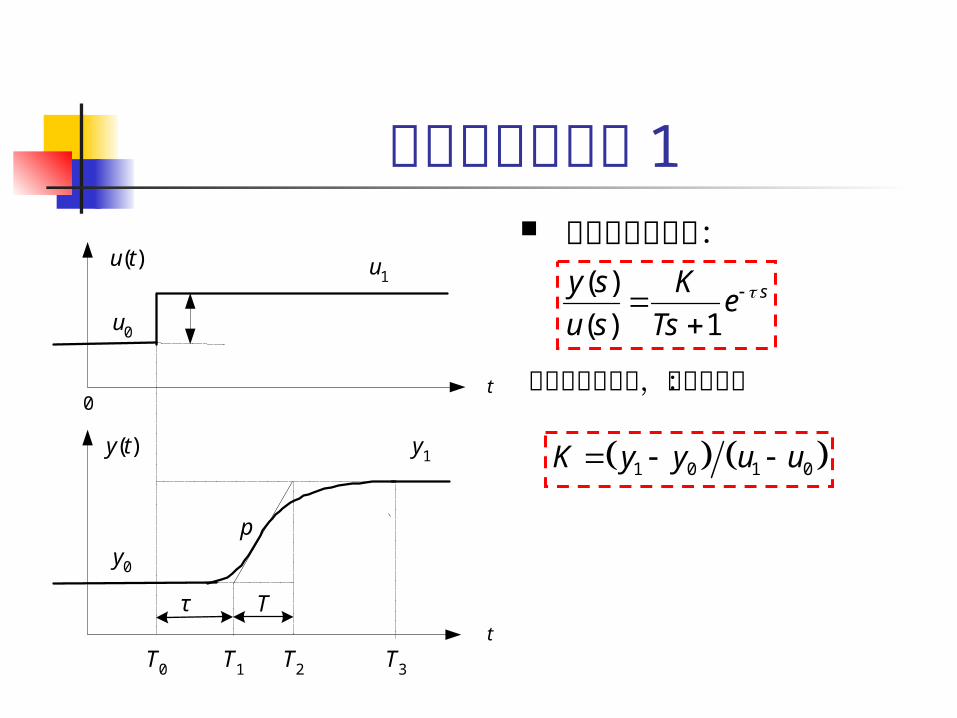
阶跃响应测试法 1
t
t0
u(t)
y(t)
y0
y1
u0
u1
T0 T3T1 T2
τ T
p
seTs
K
su
sy
1)(
)(
对象的近似模型:
对应参数见左图,而增益为:
1 0 1 0K y y u u

阶跃响应测试法 2
0 10 20 30 40 5045
50
55
60
65
%
Controller Output
0 10 20 30 40 50148
150
152
154
156
158
160
time, min
Cen
t
Heat Exchanger Outlet Temp.
63.2%
28.3%
T0
T1
T2
0.632 0 Pt T T
0.632 0.2831.5PT t t

广义对象矩形脉冲响应测试法

结 论 介绍了简单被控过程的机理建模方法与
线性化问题; 讨论了调节阀“气开、气关”形式与流
量特性的选择原则; 讲述了“广义对象”的概念及其动态特
性的典型测试方法。
思考题与习题
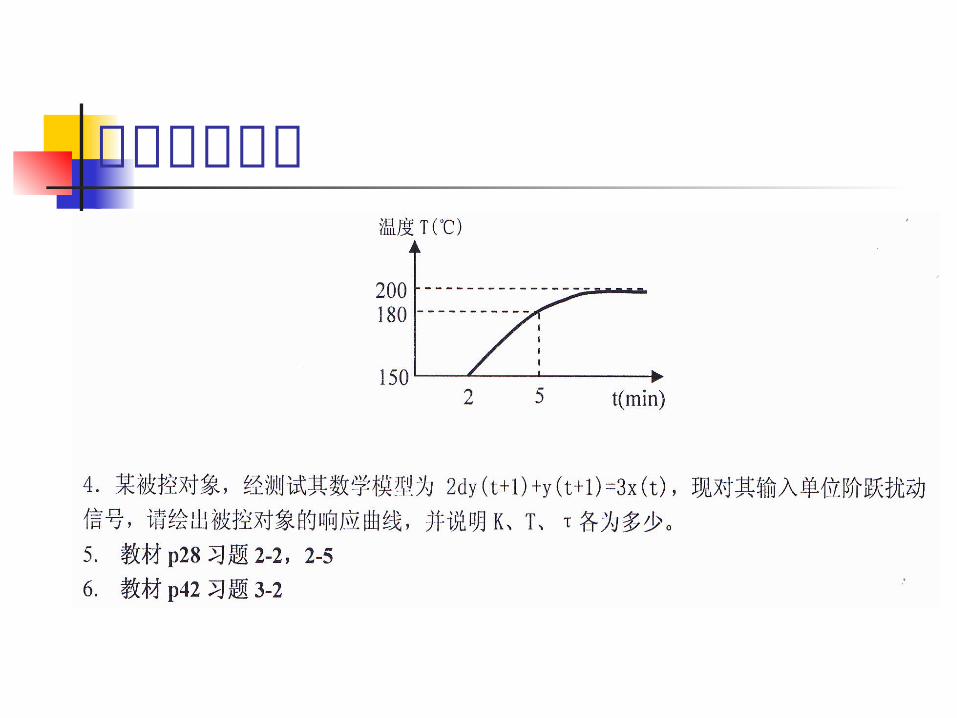
思考题与习题
仿真练习 阅读matlab帮助中 Simulink部分有关“Creating Masked Subsystems”的内容,并按照其中的说明构造自己专用的传递函数模块,该模块具有初始的输入和输出,并包含纯滞后环节。
对自己的传递函数模块进行阶跃响应测试,并用 plot命令画出阶跃输入和响应输出曲线(标明曲线的横、纵坐标,名称)。并对曲线的线形、颜色、粗细、座标等进行修改。