Embed Size (px)
Citation preview
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ БЕЛАРУСЬ УЧРЕЖДЕНИЕ ОБРАЗОВАНИЯ
«БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ТРАНСПОРТА»
Кафедра “Техническая физика и теоретическая механика”
А. О. ШИМАНОВСКИЙ, В. И. РИЖЕНКОВ, И. Е. КРАКОВА
ТЕХНИЧЕСКАЯ МЕХАНИКА
Учебно-методическое пособие для студентов инженерно-экономических специальностей
Гомель 2006
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ БЕЛАРУСЬ УЧРЕЖДЕНИЕ ОБРАЗОВАНИЯ
«БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ТРАНСПОРТА»
Кафедра “Техническая физика и теоретическая механика”
А. О. ШИМАНОВСКИЙ, В. И. РИЖЕНКОВ, И. Е. КРАКОВА
ТЕХНИЧЕСКАЯ МЕХАНИКА
Учебно-методическое пособие для студентов инженерно-экономических специальностей
Одобрено методической комиссией факультета безотрывного обучения
Гомель 2006

УДК 531.2 (075.8) ББК 22.21 Ш61
Рецензент – зав. кафедрой «Техническая физика и теоретическая механи-ка», канд. техн. наук, доцент А. В. Заворотный (УО «Бел-ГУТ»).
Шимановский, А. О.
Техническая механика: учебно-метод. пособие для студентов ин-женерно-экономических специальностей / А.О. Шимановский, В.И. Риженков, И. Е. Кракова – Гомель: УО «БелГУТ», 2006. – 63 с.
ISBN 985-468-078-9
Приведены примеры решения задач из различных разделов технической механики, а также задания для контрольных работ и другие методические ма-териалы, соответствующие программе курса технической механики для ин-женеров-экономистов.
Предназначено для студентов факультета безотрывного обучения.
УДК 531.2(075.8) ББК 22.21
© Шимановский А.О., Риженков В. И., Кракова И. Е., 2006 © Оформление УО «БелГУТ» 2006
Ш61
ISBN 985-468-078-9

3
ОГЛАВЛЕНИЕ
Введение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1 Программа курса «Техническая механика» (исходные данные для
выполнения задания 1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 Правила оформления контрольной работы . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3 Расчет равновесного состояния тела . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.1 Исходные данные для выполнения задания 2 . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.2 Пример решения задачи об определении реакций связей . . . . . . . . . . . . . . . . 18
3.3 Прочностной расчет балки . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4 Кинематический и динамический анализ механизма . . . . . . . . . . . . . . . . . . . 24
4.1 Исходные данные для выполнения задания 3 . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.2 Пример расчета механизма . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5 Контрольные вопросы по курсу «Техническая механика» . . . . . . . . . . . . . . . 44
Приложение А Электродвигатели асинхронные серии 4А, закрытые обдуваемые (по ГОСТ 19523-81) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Приложение Б Технические характеристики подшипников качения . . . . . . . . . . . 58
Список рекомендуемой литературы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62

4
ВВЕДЕНИЕ
Курс «Техническая механика», формирующий общетеоретическую и об-щетехническую подготовку студентов, необходимую при экономической оценке сооружений и машин, построен на базе четырех дисциплин – теоре-тической механики, сопротивления материалов, теории механизмов и ма-шин, деталей машин. Ввиду малого объема курса программа предусматрива-ет изучение этих дисциплин не изолированно, как отдельных самостоятель-ных частей, рассматриваемых одна после другой, а в комплексе. Поэтому вопросы сопротивления материалов и теории механизмов и машин, входя-щие в программу, помещены в ней сразу же после соответствующих разде-лов теоретической механики, обеспечивающих базу для их понимания.
Целью изложения дисциплины «Техническая механика» является не только ознакомление студентов с правилами и методами проектирования, конструирования, расчета механизмов, машин и их деталей. Вторая ее важ-нейшая задача – обучение основным стандартам Единой системы конструк-торской документации (ЕСКД), в соответствии с которыми оформляются все инженерные документы и расчеты.
При изучении материала курса следует иметь в виду, что недопустимо заучивание учебного материала курса без его достаточного понимания. Не-обходимо не только усвоить основы теории, но и научиться решать задачи. Для приобретения навыков в этом можно пользоваться руководствами по решению задач, указанными в списке рекомендованной литературы, однако овладение методами решения невозможно без решения достаточного числа задач самостоятельно.
Пособие содержит программу курса «Техническая механика», варианты заданий и образец выполнения задач, входящих в контрольную работу, тре-бования к оформлению расчетно-пояснительной записки, необходимые справочные данные, список вопросов для самопроверки по всем разделам дисциплины.
Контрольная работа включает в себя две комплексные задачи, для решения которых требуется знание всех разделов изучаемого курса, а также вопрос по теории курса «Техническая механика». При их выполнении целесообразно ис-пользование учебников и учебных пособий, список которых находится в кон-це пособия. Только самостоятельное решение задач контрольной работы обес-печит качественную подготовку к сдаче зачета по изучаемому курсу.

5
1 ПРОГРАММА КУРСА «ТЕХНИЧЕСКАЯ МЕХАНИКА» (ИСХОДНЫЕ ДАННЫЕ ДЛЯ ВЫПОЛНЕНИЯ ЗАДАНИЯ 1)
1 Статика, ее основные понятия и определения. Понятие о силе, класси-фикация систем сил. Механические связи и их реакции: гладкая и шерохова-тая поверхности, цилиндрический шарнир, невесомый стержень, гибкие свя-зи в виде нити или троса, подпятник, заделка.
2 Аксиомы статики. Теорема о равновесии тела, находящегося под дейст-вием трех непараллельных сил.
3 Система сходящихся сил. Геометрический и аналитический методы сло-жения сил, приложенных к одной точке. Уравнения равновесия тел, находя-щихся под действием плоской и пространственной систем сходящихся сил.
4 Момент силы относительно точки и оси. Вектор момента силы. Пара сил и ее момент. Сложение пар сил в плоскости и пространстве. Равновесие рычага.
5 Произвольная плоская система сил. Теорема о приведении произволь-ной плоской системы сил к данной точке. Теорема Вариньона о моменте равнодействующей. Уравнения равновесия тела, находящегося под действи-ем произвольной плоской системы сил.
6 Основные понятия и допущения сопротивления материалов. Классифи-кация элементов конструкций (стержень, пластина, оболочка, массив). Виды деформаций.
7 Метод сечений для определения внутренних сил. Понятие о напряже-ниях. Нормальная и касательная составляющие полного напряжения. Внут-ренние силовые факторы и напряжения в поперечных сечениях стержня при различных видах деформации.
8 Механические испытания материалов. Испытание материалов при рас-тяжении. Понятие о пределах пропорциональности, упругости, текучести, прочности. Понятие о допускаемом напряжении для материала.
9 Деформация растяжения-сжатия. Поперечная и продольная деформа-ции. Относительная деформация. Коэффициент Пуассона. Закон Гука при растяжении и сжатии. Модуль Юнга.
10 Методика построения эпюр внутренних продольных сил. Условие прочности при растяжении-сжатии и решаемые при его помощи задачи: про-ектный расчет, проверочный расчет, определение допускаемой нагрузки.
11 Условие жесткости стержня при деформации растяжения-сжатия и решаемые при его помощи задачи. Методика определения значений удлине-ния (укорочения) стержня, находящегося под действием заданных сил.

6
12 Срез и смятие. Условия прочности при срезе и смятии. Расчет закле-почных соединений: проверка прочности, определение требуемого числа за-клепок или их диаметра, определение допускаемой нагрузки.
13 Понятие о сварке, ее виды. Расчет на прочность сварных соединений. 14 Деформация кручения. Методика построения эпюр внутренних кру-
тящих моментов в поперечных сечениях вала. Условие прочности при де-формации кручения и решаемые при его помощи задачи.
15 Условие жесткости вала при кручении. Модуль сдвига. Определение угла закручивания, подбор его поперечного сечения, определение допускае-мого крутящего момента из условия жесткости вала.
16 Деформация изгиба. Методика построения эпюр внутренних попереч-ных сил и изгибающих моментов в поперечных сечениях балки. Условия прочности по нормальным и касательным напряжениям при изгибе.
17 Понятие об усталостном разрушении. Расчеты на прочность при пере-менных напряжениях, симметричные, асимметричные циклы напряжений. Предел выносливости. Местные напряжения. Коэффициент концентрации напряжений.
18 Кинематика. Основные понятия: система отсчета, траектория, путь, закон движения, скорость, ускорение. Уравнения движения, скорость и ус-корение точки в декартовой и естественной системе координат.
19 Виды движения точки в зависимости от формы траектории и закона изменения скорости: прямолинейное и криволинейное, равномерное и не-равномерное, равнопеременное движение точки. Законы движения, скорости и ускорения для каждого вида движения точки.
20 Простейшие движения твердого тела. Поступательное движение. Вращательное движение твердого тела относительно неподвижной оси. Уг-ловая скорость и угловое ускорение тела.
21 Скорость и ускорение точки на вращающемся теле. Угол поворота и угловая скорость тела при равнопеременном вращении. Преобразование простейших движений твердых тел в механизмах. Передаточное число.
22 Плоскопараллельное движение твердого тела. Представление плоско-параллельного движения в виде комбинации двух независимых простейших движений: поступательного вместе с полюсом и вращательного относитель-но полюса. Скорость и ускорение точки тела, совершающего плоскопарал-лельное движение. Мгновенный центр скоростей.

7
23 Динамика. Основные понятия и законы динамики материальной точ-ки. Прямая и обратная задачи динамики материальной точки и методика их решения.
24 Элементарная работа силы и работа силы на конечном перемещении. Работа силы тяжести, силы трения, силы упругости, момента пары сил. Мощность. Коэффициент полезного действия.
25 Количество движения материальной точки. Импульс силы. Теорема об изменении количества движения материальной точки. Закон сохранения ко-личества движения. Методика применения теоремы при решении задач.
26 Кинетическая энергия материальной точки. Теорема об изменении ки-нетической энергии материальной точки. Методика применения теоремы при решении задач.
27 Понятие о материальной системе. Теорема о движении центра масс материальной системы. Закон сохранения движения центра масс. Количест-во движения материальной системы. Теорема об изменении количества дви-жения материальной системы.
28 Момент количества движения точки относительно оси. Главный мо-мент количества движения (кинетический момент) системы и твердого тела. Теорема об изменении кинетического момента. Закон сохранения кинетиче-ского момента системы.
29 Дифференциальные уравнения поступательного и вращательного движений твердого тела. Момент инерции тела относительно оси как мера инертности тела при вращательном движении. Связь между моментами инерции, вычисленными относительно параллельных осей.
30 Кинетическая энергия тела при поступательном, вращательном и плоскопараллельном движениях. Теорема об изменении кинетической энер-гии материальной системы. Методика решения задач динамики материаль-ной системы при помощи теоремы об изменении кинетической энергии.
31 Принцип Даламбера для материальной точки и материальной системы. Силы и моменты сил инерции. Методика решения задач динамики при по-мощи принципа Даламбера.
32 Теория механизмов и машин. Ее основные задачи. Классификация машин и механизмов. Структура механизмов, основные понятия: звено, ки-нематическая пара, кинематическая цепь.
33 Классификация кинематических пар плоских и пространственных ме-ханизмов в зависимости от числа условий связей и характера соприкоснове-ния звеньев.

8
34 Кинематические схемы, область их применения. Звенья механизмов: кривошипно-ползунного, кулачкового, кулисного, коромыслового, их назва-ния и функции. Характер преобразования движения в них.
35 Структурная формула кинематической цепи общего вида (формула Сомова-Малышева). Структурная формула плоских механизмов (формула Чебышева). Методика определения степени подвижности плоских механизмов.
36 Основной принцип образования плоских шарнирно-рычажных меха-низмов. Группы Ассура и их классификация. Методика разбиения кинемати-ческой цепи механизма с низшими кинематическими парами на группы Ас-сура.
37 Основные задачи кинематического анализа механизмов. Аналитиче-ский и графический методы кинематического анализа. Методика построения плана положений на примере кривошипно-ползунного механизма. План ско-ростей механизма в исследуемом положении – методика его построения и определения угловых скоростей звеньев и линейных скоростей точек. Кине-матические диаграммы.
38 Динамический анализ механизмов, его основные задачи. Классифика-ция сил, действующих на звенья механизма. Силовой анализ. Реакции в ки-нематических парах. Уравновешивающая сила. Методика применения прин-ципа Даламбера для силового анализа механизмов.
39 Детали машин, их классификация. Требования, предъявляемые к ма-шинам, их узлам и деталям. Основные критерии работоспособности деталей машин: прочность, жесткость, износостойкость, теплостойкость. Уравнение теплового баланса машины. Методы обеспечения прочности, жесткости, из-носостойкости, теплостойкости.
40 Надежность машин и их деталей. Основные показатели безотказной работы деталей и методика их определения: вероятность безотказной работы одной детали и машины в целом, наработка на отказ.
41 Основные машиностроительные материалы. Металлические и неме-таллические материалы. Методика выбора материала в зависимости от на-значения детали и способа ее изготовления. Стали, чугуны, сплавы на мед-ной основе, сплавы легких металлов: классификация, основные механиче-ские свойства, виды термической и химико-термической обработки.
42 Механические передачи вращательного движения, их назначение и классификация. Основные параметры механических передач. Передачи тре-нием (фрикционные, ременные), передачи зацеплением (зубчатые, червяч-ные, цепные): особенности конструкции, достоинства, недостатки.

9
43 Зубчатые передачи, их классификация по расположению зубьев отно-сительно образующей колеса и в зависимости от взаимного расположения осей ведущего и ведомого валов. Конструкция зубчатых колес. Основные параметры зубчатого зацепления: шаг и модуль зацепления, диаметры впа-дин, выступов, делительный, межосевое расстояние, числа зубьев шестерни и колеса. Силы, действующие в зубчатом зацеплении прямозубых цилинд-рических колес. Виды разрушения и повреждения поверхностей зубьев.
44 Соединения деталей машин, их классификация и область применения. Соединения разборные (резьбовые, шпоночные, шлицевые) и неразборные (сварные, заклепочные, клеевые, пайка, запрессовка). Классификация резьб и резьбовых соединений. Основные виды деталей резьбовых соединений и об-ласть их применения. Способы борьбы с самоотвинчиванием.
45 Валы и оси, их классификация и конструктивные особенности. Проектный расчет валов на кручение по касательным напряжениям. Конструирование валов. Методика проверочного расчета валов на прочность и жесткость.
46 Опоры качения и скольжения. Подшипники качения, их конструкция и классификация. Методика выбора подшипников качения и расчет подшип-ников на долговечность. Подшипники скольжения. Конструкция подшипни-ковых узлов. Смазка подшипников.
47 Муфты, их назначение и классификация. Конструктивные особенно-сти основных типов соединительных муфт: втулочной, упругой втулочно-пальцевой, продольно-разъемной, крестово-шарнирной, крестово-кулисной. Сцепные фрикционные муфты. Предохранительные муфты.
48 Стандартизация. Классификация стандартов. Основные объекты стан-дартизации в машиностроении. Единая система конструкторской докумен-тации (ЕСКД). Унификация деталей и узлов машин и механизмов.
49 Взаимозаменяемость деталей машин. Управление качеством. Степени точности изготовления деталей (квалитеты). Критерии оценки качества об-работки поверхности детали. Классы шероховатости. Отклонения формы и расположения поверхностей.
50 Единая система допусков и посадок гладких цилиндрических соеди-нений (ЕСДП). Посадки с зазором, натягом, переходные. Методика построе-ния полей допусков для данной посадки при помощи таблиц ЕСДП. Система вала, система отверстия.

10
2 ПРАВИЛА ОФОРМЛЕНИЯ КОНТРОЛЬНОЙ РАБОТЫ
Контрольная работа включает три задания: 1) ответ на теоретический вопрос; 2) расчет равновесного состояния тела; 3) кинематический и динамический анализ механизма. Варианты заданий для контрольной работы следует выбирать по двум
последним цифрам учебного шифра в соответствии с таблицей 2.1. При оформлении контрольной работы необходимо соблюдать следующие
основные правила: – контрольная работа выполняется на листах формата А4 (210×297), при-
чем все материалы следует размещать с одной стороны листа; – работу можно оформлять рукописным или машинописным способом;
при рукописном способе текст должен наноситься основным чертежным шрифтом с высотой букв не менее 2,5 мм;
– расстояние от рамки формы до границ текста в начале и в конце строк должно быть не менее 5 мм;
– расстояние от верхней или нижней строки текста до верхней или ниж-ней стороны рамки должно быть не менее 10 мм;
– абзац в тексте начинают отступом, равным 15–17 мм; каждый пункт текста записывают с абзаца; цифры, указывающие номера пунктов, не долж-ны выступать за границу абзаца;
– на первом листе пояснительной записки располагают «Содержание» и основную надпись по форме 2 (высотой 40 мм); на всех остальных листах основная надпись должна соответствовать форме 2а (высота 15 мм);
– каждое задание (раздел работы) должно начинаться с нового листа; – в пределах раздела формулы, рисунки, таблицы должны иметь сквоз-
ную нумерацию; – расстояние между заголовком и текстом – 15 мм, между заголовками
раздела и подраздела – 8 мм; – опечатки, описки и графические неточности, обнаруженные в процессе
оформления работы, допускается исправлять подчисткой или закрашиванием белой краской и нанесением исправленного текста (графики) на том же месте;
– повреждать в процессе исправления листы, оставлять помарки или сле-ды не полностью удаленного прежнего текста не допускается;
– произвольные сокращения слов совершенно недопустимы, все сокра-щения должны соответствовать ГОСТ 2.316 (например: м/с, с. (страница));
– при необходимости ссылки на литературный источник указывают его номер в перечне литературы. Номер заключается в квадратные скобки.
Контрольные, выполненные небрежно или без соблюдения правил ЕСКД, не рецензируются, а возвращаются их авторам для переоформ-ления.

Таблица 2.1 – Варианты заданий для выполнения контрольной работы
Задания Задания Задания Задания Учебный шифр 1 2 3
Учебный шифр 1 2 3
Учебныйшифр 1 2 3
Учебный шифр 1 2 3
01 50 1 20 26 25 1 15 51 1 1 10 76 26 1 5 02 49 2 19 27 24 2 14 52 2 2 9 77 27 2 4 03 48 3 18 28 23 3 13 53 3 3 8 78 28 3 3 04 47 4 17 29 22 4 12 54 4 4 7 79 29 4 2 05 46 5 16 30 21 5 11 55 5 5 6 80 30 5 1 06 45 6 15 31 20 6 10 56 6 6 5 81 31 6 20 07 44 7 14 32 19 7 9 57 7 7 4 82 32 7 19 08 43 8 13 33 18 8 8 58 8 8 3 83 33 8 18 09 42 9 12 34 17 9 7 59 9 9 2 84 34 9 17 10 41 10 11 35 16 10 6 60 10 10 1 85 35 10 16 11 40 11 10 36 15 11 5 61 11 11 20 86 36 11 15 12 39 12 9 37 14 12 4 62 12 12 19 87 37 12 14 13 38 13 8 38 13 13 3 63 13 13 18 88 38 13 13 14 37 14 7 39 12 14 2 64 14 14 17 89 39 14 12 15 36 15 6 40 11 15 1 65 15 15 16 90 40 15 11 16 35 16 5 41 10 16 20 66 16 16 15 91 41 16 10 17 34 17 4 42 9 17 19 67 17 17 14 92 42 17 9 18 33 18 3 43 8 18 18 68 18 18 13 93 43 18 8 19 32 19 2 44 7 19 17 69 19 19 12 94 44 19 7 20 31 20 1 45 6 20 16 70 20 20 11 95 45 20 6 21 30 21 20 46 5 21 15 71 21 21 10 96 46 21 5 22 29 22 19 47 4 22 14 72 22 22 9 97 47 22 4 23 28 23 18 48 3 23 13 73 23 23 8 98 48 23 3 24 27 24 17 49 2 24 12 74 24 24 7 99 49 24 2 25 26 25 16 50 1 25 11 75 25 25 6 00 50 25 1
12
3 РАСЧЕТ РАВНОВЕСНОГО СОСТОЯНИЯ ТЕЛА
3.1 Исходные данные для выполнения задания 2
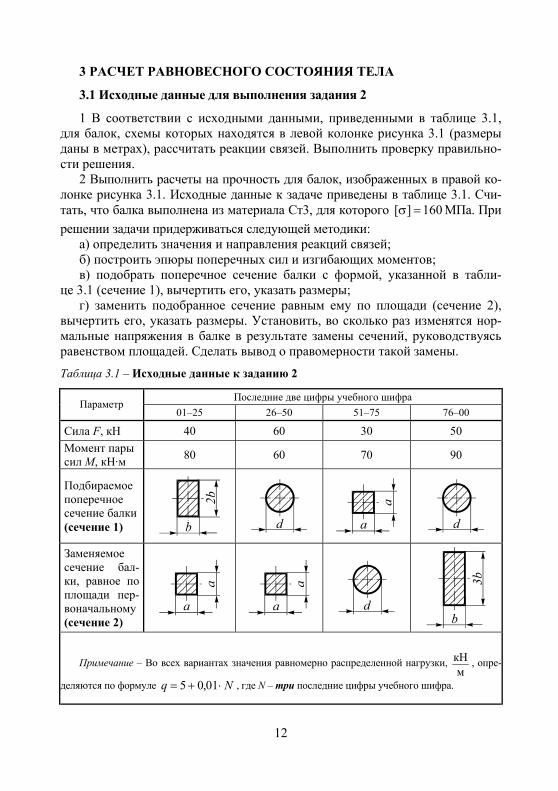
1 В соответствии с исходными данными, приведенными в таблице 3.1, для балок, схемы которых находятся в левой колонке рисунка 3.1 (размеры даны в метрах), рассчитать реакции связей. Выполнить проверку правильно-сти решения.
2 Выполнить расчеты на прочность для балок, изображенных в правой ко-лонке рисунка 3.1. Исходные данные к задаче приведены в таблице 3.1. Счи-тать, что балка выполнена из материала Ст3, для которого 160][ =σ МПа. При решении задачи придерживаться следующей методики:
а) определить значения и направления реакций связей; б) построить эпюры поперечных сил и изгибающих моментов; в) подобрать поперечное сечение балки с формой, указанной в табли-
це 3.1 (сечение 1), вычертить его, указать размеры; г) заменить подобранное сечение равным ему по площади (сечение 2),
вычертить его, указать размеры. Установить, во сколько раз изменятся нор-мальные напряжения в балке в результате замены сечений, руководствуясь равенством площадей. Сделать вывод о правомерности такой замены.
Таблица 3.1 – Исходные данные к заданию 2
Последние две цифры учебного шифра Параметр
01–25 26–50 51–75 76–00
Сила F, кН 40 60 30 50 Момент пары сил М, кН·м 80 60 70 90
Подбираемое поперечное сечение балки (сечение 1)
Заменяемое сечение бал-ки, равное по площади пер-воначальному (сечение 2)
Примечание – Во всех вариантах значения равномерно распределенной нагрузки, мкН , опре-
деляются по формуле Nq ⋅+= 01,05 , где N – три последние цифры учебного шифра.

13
1
2
3
4
5
Рисунок 3.1 (начало)

14
6
7
8
9
10
Рисунок 3.1 (продолжение)

15
11
12
13
14
15
Рисунок 3.1 (продолжение)

16
16
17
18
19
20
Рисунок 3.1 (продолжение)
17
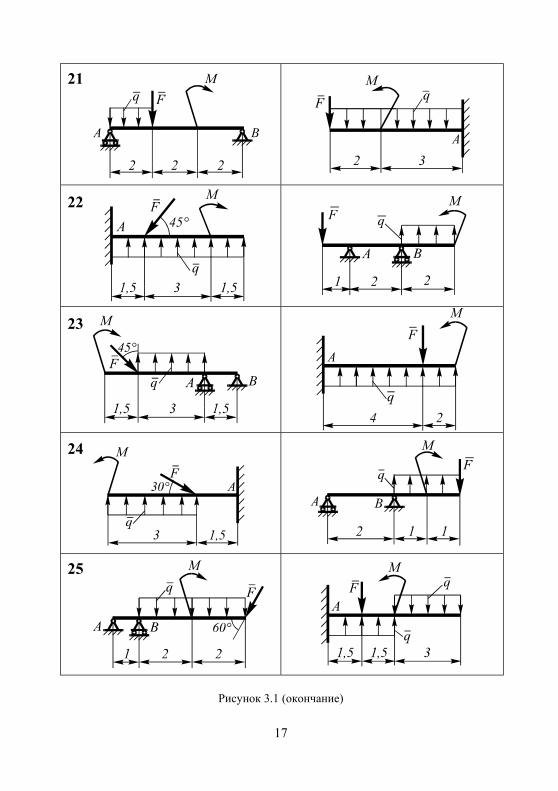
21
22
23
24
25
Рисунок 3.1 (окончание)

18
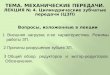
3.2 Пример решения задачи об определении реакций связей Криволинейный стержень, изображенный на рисунке 3.2, заделан в точ-
ке А. Пренебрегая весом стержня, определить реакции связи. Размеры конст-рукции и действующие силовые факторы указаны на рисунке.
Дано : q = 2 кН/м; F = 10 кН; Р = 5 кН; М = 15 кН·м.
Определить : реакции связей. Решение 1 Изображаем раму с наложенными на нее
механическими связями. 2 Активные силы, действующие на раму –
сосредоточенные силы Р и F, равномерно рас-пределенная нагрузка с интенсивностью q, а также пара сил с моментом М.
Равномерно распределенную нагрузку интенсивности q заменяем си-лой Q, которую прикладываем в центре прямоугольника, изображающего эту нагрузку (рисунок 3.3). Значение силы
632 =⋅=⋅= CEqQ кН. 3 Расставляем векторы реакций меха-
нических связей. Реакция заделки вклю-чает две составляющие реакции – гори-зонтальную AxR
r и вертикальную AyR
r, а
также момент заделки MA. 4 Изображаем систему отсчета: ось Nх
направляем горизонтально, ось Ny – вер-тикально.
5 Силы, действующие на раму, не схо-дятся в одной точке, поэтому составляем три уравнения равновесия:
∑ =°−= 045cos;0 PRF Axix ; (3.1)
∑ =°−−+= 045cos;0 PQFRF Ayiy ; (3.2)
.0;0)( =+−⋅+⋅−⋅−=∑ AA MMACFALQAKPFM (3.3) Замечание – В качестве моментной выбрана точка А, так как через нее проходят
линии действия неизвестных сил и их моменты относительно этой точки равны нулю.
6 Решая полученную систему уравнений, находим значения неизвестных реакций связей.
Из уравнения (3.1) имеем кН 54,3707,0545cos =⋅=°= PRAx .
Рисунок 3.2
Рисунок 3.3

19
Уравнение (3.2) дает кН 46,0707,0561045cos −=⋅++−=°++−= PQFRAy .
Равнодействующая силы реакции заделки
.кН 57,346,054,3 2222 =+=+= AyAxA RRR
Момент заделки из уравнения (3.3) мкН 28,44152105,36245 ⋅=+⋅−⋅+⋅⋅=+⋅−⋅+⋅= MACFALQAKPM A .
7 Для проверки правильности решения задачи составим уравнение мо-ментов относительно точки B, через которую не проходят линии действия искомых сил:
.0546,0354,328,44153105,16
5335,1;0)(
=⋅+⋅−+−⋅−⋅=
=⋅−⋅−+−⋅−⋅=∑ AyAxAiB RRMMFQFM
Полученный результат подтверждает правильность расчетов.
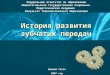
3.3 Прочностной расчет балки Для изображенной на рисунке 3.4 стальной балки выполнить расчеты на
прочность в соответствии с заданием контрольной работы.
Дано : q = 3 кН/м; М = 7 кН·м; F = 8 кН; l = 2 м; сечение 1 – прямо-угольник (h = 1,5b); сечение 2 – круг; [σ] = 160 МПа.
Определить : реакции внешних связей; внутренние поперечные силы и изгибающие моменты; размеры сече-ний и максимальные нормальные напряжения в них.
Решение 1 Определяем реакции внешних
связей. Балка удерживается в равнове-сии с помощью шарнира А и опоры B. Реакцию опоры B направляем перпен-дикулярно опорной плоскости (рису-нок 3.5). Поскольку все активные си-лы и реакция опоры вертикальны, то вдоль вертикальной прямой направля-
ем и реакцию шарнира А. Составляем уравнения равновесия балки:
04;0 =⋅−++−=∑ qRRFF BAiy ; (3.4)
.06442;0 =⋅++⋅⋅−⋅=∑ BiA RMqFM (3.5)
Рисунок 3.4
Рисунок 3.5

20
Из уравнения (3.5) получаем:
кН17,46
7281636
216=
−⋅−⋅=
−⋅−⋅=
MFqRB .
Уравнение (3.4) дает: кН.83,1517,44384 =−⋅+=−⋅+= BA RqFR
Для проверки правильности расчета реакций внешних связей составляем уравнение моментов относительно новой точки:
06248;0 =⋅++⋅⋅+⋅=∑ AiB RMqFM ; 0683,15724388 =⋅−+⋅⋅+⋅ (верно).
2 Выполняем построение эпюр внутренних силовых факторов. Для этого первоначально обозначаем расчетные сечения. Их располагаем левее и пра-вее точек приложения внешних сил и моментов, а также в месте начала дей-ствия распределенной нагрузки (см. рисунок 3.5).
Последовательно рассматриваем равновесие отсеченной части, располо-женной левее или правее каждого сечения. Ось y направляем вверх по вер-тикали. Внутренние силы и моменты направляем в соответствии с правилом: для части, расположенной левее сечения, момент направляем против хода часовой стрелки, поперечную силу вниз, а для части, расположенной справа от сечения – в противоположные стороны.
Сечение 1 (рисунок 3.6)
.0;0
;0;0
11
1
==
=−−=
∑∑
MM
QFF
i
iy
Отсюда 81 −=−= FQ кН.
Сечение 2 (рисунок 3.7)
.02;0
;0;0
22
2
=⋅+=
=−−=
∑∑
FMM
QFF
i
iy
Из записанных уравнений находим: 82 −=−= FQ кН, 162822 −=⋅−=⋅−= FM кН⋅м.
Сечение 3 (рисунок 3.8)
.02;0
;0;0
33
3
=⋅+=
=−+−=
∑∑
FMM
QRFF
i
Aiy
Указанные уравнения дают: 83,783,1583 =+−=+−= ARFQ кН,
162823 −=⋅−=⋅−= FM кН⋅м.
Рисунок 3.6
Рисунок 3.7
Рисунок 3.8

21
Сечение 4 (рисунок 3.9):
.024;0
;0;0
44
4
=⋅−⋅+=
=−+−=
∑∑
Ai
Aiy
RFMM
QRFF
Из этих уравнений получаем: 83,783,1584 =+−=+−= ARFQ кН;
34,0283,1548244 −=⋅+⋅−=⋅+⋅−= ARFM кН⋅м. Замечание – Для расчета внутренних силовых
факторов в сечении 4 можно рассмотреть и часть, на-ходящуюся справа от сечения (рисунок 3.10). В этом случае из уравнений:
,0424;0
;04;0
44
4
=+⋅+⋅⋅−−=
=+⋅−=
∑∑
MRqMM
QqRF
Bi
Biy
имеем 83,74317,444 =⋅+−=⋅+−= qRQ B кН; 32,07417,483484 −=+⋅+⋅−=+⋅+⋅−= MRqM B кН⋅м.
Погрешность обусловлена округлением значений реакций связей.
Сечение 5 (рисунок 3.11)
.0212;0
;02;0
55
5
=+⋅+⋅⋅−−=
=+⋅−=
∑∑
MRqMM
QqRF
Bi
Biy
Отсюда 83,12317,425 =⋅+−=⋅+−= qRQ B кН;
=+⋅+⋅−= MRqM B 225 34,97217,423 =+⋅+⋅−= кН⋅м.
Сечение 6 (рисунок 3.12)
.0212;0
;02;0
66
6
=⋅+⋅⋅−−=
=+⋅−=
∑∑
Bi
Biy
RqMM
QqRF
Следовательно, 83,12317,426 =⋅+−=⋅+−= qRQ B кН;
34,2217,423226 =⋅+⋅−=⋅+⋅−= BRqM кН⋅м.
Сечение 7 (рисунок 3.13)
.0;0
;0;0
77
7
=−=
=+=
∑∑
MM
QRF
i
Biy
Тогда 17,47 −=−= BRQ кН; 07 =M .
Рисунок 3.10
Рисунок 3.9
Рисунок 3.12
Рисунок 3.13
Рисунок 3.11

22
По результатам выполненных расчетов строим эпюру поперечных сил Q, откладывая найденные значе-ния в масштабе. Получившиеся точ-ки соединяем прямыми линиями, как показано на рисунке 3.14.
На участке действия распреде-ленной нагрузки между сечениями 6 и 7 знак поперечной силы меня-ется с положительного на отрица-тельный. Поэтому в пределах ука-занного участка внутренний изги-бающий момент сначала увеличи-вается, а затем уменьшается. Оп-ределим значение максимального изгибающего момента на участке, рассматривая равновесие части балки, находящейся правее сечения 8 (рисунок 3.15), соответствующе-го месту, в котором Q = 0.
Уравнения равновесия отсечен-ной части имеют вид:
.02
;0
;0;02
88
8
=+−−=
=+−=
∑∑
xRxqMM
QxqRF
Bi
Biy
Из первого уравнения, подставляя Q8 = 0, получаем
39,1317,4
===q
Rx B м.
Тогда из уравнения моментов находим:
90,239,117,4239,13
2
22
8 =⋅+⋅
−=+−= xRqxM B кН⋅м.
Теперь в масштабе откладываем найденные значения внутренних момен-тов на эпюре (см. рисунок 3.14). На участках с постоянными внутренними силами (между сечениями 1, 2 и 3, 4) точки графика соединяем прямыми ли-ниями. Там, где внутренняя сила Q переменна (между сечениями 4, 5 и 6, 7), линии имеют параболическую форму.
3 Подбираем поперечное сечение балки в форме прямоугольника с соот-ношением сторон h = 1,5b.
Условие прочности при изгибе имеет вид:
Рисунок 3.14
Рисунок 3.15

23
][σ≤=σxW
M . (3.6)
Из эпюры внутренних изгибающих моментов следует, что максимальный момент Mmax = 16 кН⋅м. Момент сопротивления Wx прямоугольного попе-речного сечения с учетом подстановки заданного размера h
322
375,06
)5,1(6
bbbbhWx === .
Подставляя указанные значения в условие прочности (3.6), получаем:
][375,0 3
max σ≤b
M; мм. 64,4 м 0644,0
10160375,01016
][375,03
6
33 max ==
⋅⋅
⋅=
σ≥
Mb
Принимаем для дальнейших расчетов ближайшее большее четное число миллиметров: b = 66 мм. Тогда
h = 1,5 b = 1,5 ⋅ 66 = 99 мм. Площадь подобранного сечения
A = b h = 66 ⋅ 99 = 6534 мм2. 4 Заменяем подобранное сечение равным ему по площади круглым. По-
скольку площадь круга
4
2DA π= , то мм 91653444
=π
⋅=
π=
AD .
Вычерчиваем подобранные сечения в масштабе (рисунок 3.16). Определяем моменты сопротивления сечений с учетом их размеров. Для прямоугольного сечения имеем:
.м 1008,1мм 1008,169966
63435
22
1−⋅=⋅=
⋅==
bhWx
Для круглого сечения
.м 104,7мм 1040,73291
323534
33
2−⋅=⋅=
⋅π=
π=
DWx
Соответственно, напряжения в этих сечениях:
МПа. 148 Па 101481008,11016 6
4
3
1
max1 =⋅=
⋅
⋅==σ
−xW
M
МПа. 216 Па 10216104,71016 6
5
3
2
max2 =⋅=
⋅
⋅==σ
−xW
M
Нормальные напряжения в результате замены сечений увеличились в 216 / 148 = 1,46 раза. Поскольку нормальные напряжения превысили допус-каемое значение, замена прямоугольного сечения круглым неправомерна.
Рисунок 3.16

24
4 КИНЕМАТИЧЕСКИЙ И ДИНАМИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
4.1 Исходные данные для выполнения задания 3
Для механизмов, схемы которых приведены на рисунках 4.1–4.10: 1 Определить общее передаточное отношение двухступенчатой механи-
ческой передачи и при необходимости – недостающие диаметры колес. 2 Определить угловые скорости ведущего и промежуточного валов пере-
дачи. 3 Найти линейную скорость и линейное ускорение точки А, выполнить
проверку. 4 Определить потребную мощность электродвигателя. По каталогу
электродвигателей выбрать наиболее подходящий двигатель для данной передачи.
5 Определить крутящие моменты на валах механической передачи. По известным значениям крутящих моментов определить минимально необхо-димые диаметры валов, полагая допускаемое касательное напряжение [τ] = 14 МПа.
6 Подобрать подшипники качения, исходя из расчетного времени работы передачи Lh = 30000 часов.
7 Определить кинетическую энергию системы при установившемся ре-жиме работы механической передачи (если для какого-либо тела в исходных данных не указан радиус инерции, считать это тело сплошным однородным диском). Найти приведенный момент инерции механизма.
Исходные данные для расчета взять в соответствии с номером варианта и учебным шифром из таблиц 4.1–4.20, в которых использованы следующие обозначения:
z1, z2, z3, z4 – числа зубьев соответствующих колес; d1, d2, d3, d4 – диаметры шкивов или катков; m1, m2, m3, m4 – массы зубчатых колес, катков, шкивов, звездочек; i1, i2, i3, i4 – радиусы инерции тел вращения;
mn – нормальный модуль зацепления ( конnm , цил
nm – для конической и ци-линдрической передач соответственно);
t – шаг цепи; n4 – частота вращения ведомого (выходного) вала; P4 – мощность на ведомом (выходном) валу.

25
1
2
Рисунок 4.1
Таблица 4.1 – Исходные данные к заданию 3 для варианта 1 (схема 1, рисунок 4.1)
Учебный шифр
z1, шт.
z2, шт.
mn, мм
d3, мм
d4, мм
n4, об/мин
P4, кВт
m1, кг
m2, кг
m3, кг
m4, кг
i2, м
20 20 50 3,0 50 200 98,0 5 0,9 2,7 0,4 3,0 0,3 40 30 150 2,5 80 240 97,0 20 1,4 7,0 1,0 5,0 0,4 60 17 68 4,0 100 300 248,0 8 1,0 5,0 0,8 2,6 0,25 80 25 140 1,5 35 196 94,5 4 0,8 4,0 0,6 3,5 0,2 00 40 80 5,0 120 480 185,0 38 3,0 7,0 1,5 6,0 0,6
Таблица 4.2 – Исходные данные к заданию 3 для варианта 2 (схема 2, рисунок 4.1)
Учебный шифр
z1, шт.
z2, шт.
mn, мм
d3, мм
d4, мм
n4, об/мин
P4, кВт
m1, кг
m2, кг
m3, кг
m4, кг
i2, м
19 25 200 3,0 60 480 46,0 2 0,8 4,0 1,2 5,0 0,6 39 32 227 4,0 80 320 52,0 5 1,2 7,0 0,9 6,0 0,7 59 18 45 2,5 40 160 74,5 1 0,5 2,0 0,6 1,8 0,2 79 50 150 1,5 50 200 83,0 4 1,0 3,5 0,8 3,0 0,3 99 20 100 6,0 60 300 59,0 60 2,0 8,0 0,6 4,0 0,8

26
3
4
Рисунок 4.2
Таблица 4.3 – Исходные данные к заданию 3 для варианта 3 (схема 3, рисунок 4.2)
Учебный шифр
z1, шт.
z2, шт.
mn, мм
d3, мм
d4, мм
n4, об/мин
P4, кВт
m1, кг
m2, кг
m3, кг
m4, кг
i1, м
i2, м
18 27 135 2,0 30 180 98,5 0,8 1,0 6,0 0,8 7,0 0,05 0,20 38 40 80 4,0 60 180 248,0 4,0 1,4 2,8 1,0 2,5 0,07 0,14 58 32 72 3,0 100 200 220,0 6,0 0,9 2,0 1,6 3,0 0,06 0,20 78 20 60 1,5 50 150 83,0 2,0 0,5 1,6 1,0 3,5 0,01 0,08 98 45 72 5,0 160 280 1070,0 70,0 3,6 7,0 2,0 4,0 0,20 0,60
Таблица 4.4 – Исходные данные к задаче 3 для варианта 4 (схема 4, рисунок 4.2)
Учебный шифр
t, мм
d1, мм
d2, мм
z3, шт.
z4, шт.
n4, об/мин
P4, кВт
m1, кг
m2, кг
m3, кг
m4, кг
17 9,525 80 320 25 75 62,0 10 1,0 5,0 1,0 3,4 37 12,700 100 250 25 100 298,0 17 1,2 3,0 1,8 2,7 57 25,400 120 360 20 80 124,0 25 1,3 6,0 1,2 4,0 77 15,875 70 248 35 70 140,0 4 1,0 4,0 1,5 3,0 97 19,050 95 427 40 100 26,5 7 1,1 4,5 1,4 3,0

27
5
6
Рисунок 4.3
Таблица 4.5 – Исходные данные к заданию 3 для варианта 5 (схема 5, рисунок 4.3)
Учебный шифр
t, мм
z1, шт.
z2, шт.
d3, мм
d4, мм
n4, об/мин
P4, кВт
m1, кг
m2, кг
m3, кг
m4, кг
i2, м
16 12,700 30 95 80 360 105 4 1,5 4,0 0,8 3,5 0,08 36 9,525 20 100 100 560 105 15 1,2 4,5 1,2 7,0 0,06 56 12,700 20 80 70 155 82 3 3,0 8,0 0,7 2,5 0,30 76 19,050 15 45 90 180 248 8 2,0 6,0 1,0 2,0 0,10 96 38,100 25 50 120 360 165 10 3,5 7,0 1,4 4,0 0,09
Таблица 4.6 – Исходные данные к заданию 3 для варианта 6 (схема 6, рисунок 4.3)
Учебный шифр
d1, мм
d2, мм
d3, мм
d4, мм
n4, об/мин
P4, кВт
m1, кг
m2, кг
m3, кг
m4, кг
i4, м
15 90 450 80 400 59 3,5 1,2 6,0 1,6 6,0 0,38 35 70 441 80 320 118 10,0 0,9 5,0 1,6 5,0 0,25 55 180 540 160 320 247 80,0 2,0 7,0 3,2 6,0 0,28 75 50 140 70 210 118 2,5 0,6 2,5 1,5 5,0 0,20 95 120 168 140 280 266 35,0 1,8 2,4 3,0 5,8 0,30
28
7
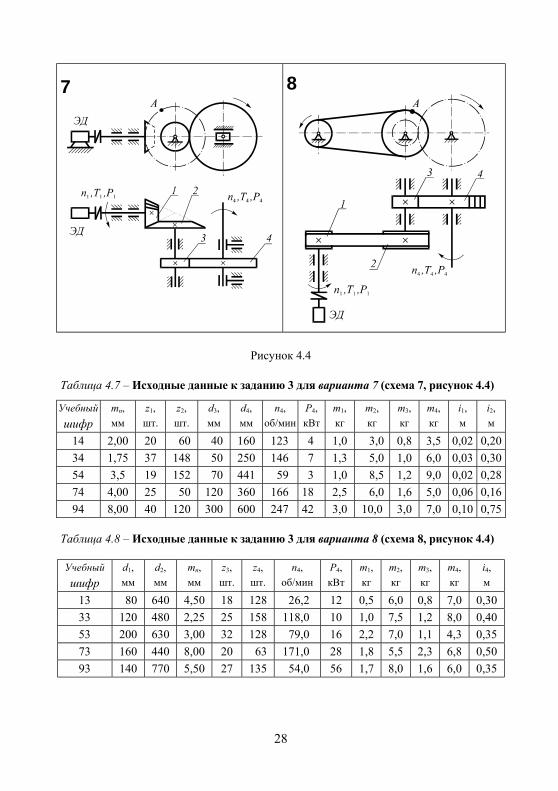
8
Рисунок 4.4
Таблица 4.7 – Исходные данные к заданию 3 для варианта 7 (схема 7, рисунок 4.4)
Учебный шифр
mn, мм
z1, шт.
z2, шт.
d3, мм
d4, мм
n4, об/мин
P4, кВт
m1, кг
m2, кг
m3, кг
m4, кг
i1, м
i2, м
14 2,00 20 60 40 160 123 4 1,0 3,0 0,8 3,5 0,02 0,20 34 1,75 37 148 50 250 146 7 1,3 5,0 1,0 6,0 0,03 0,30 54 3,5 19 152 70 441 59 3 1,0 8,5 1,2 9,0 0,02 0,28 74 4,00 25 50 120 360 166 18 2,5 6,0 1,6 5,0 0,06 0,16 94 8,00 40 120 300 600 247 42 3,0 10,0 3,0 7,0 0,10 0,75
Таблица 4.8 – Исходные данные к заданию 3 для варианта 8 (схема 8, рисунок 4.4) Учебный шифр
d1, мм
d2, мм
mn, мм
z3, шт.
z4, шт.
n4, об/мин
P4, кВт
m1, кг
m2, кг
m3, кг
m4, кг
i4, м
13 80 640 4,50 18 128 26,2 12 0,5 6,0 0,8 7,0 0,30 33 120 480 2,25 25 158 118,0 10 1,0 7,5 1,2 8,0 0,40 53 200 630 3,00 32 128 79,0 16 2,2 7,0 1,1 4,3 0,35 73 160 440 8,00 20 63 171,0 28 1,8 5,5 2,3 6,8 0,50 93 140 770 5,50 27 135 54,0 56 1,7 8,0 1,6 6,0 0,35

29
9
10
Рисунок 4.5
Таблица 4.9 – Исходные данные к заданию 3 для варианта 9 (схема 9, рисунок 4.5)
Учебный шифр
d1, мм
d2, мм
mn, мм
z3, шт.
z4, шт.
n4, об/мин
P4, кВт
m1, кг
m2, кг
m3, кг
m4, кг
i3, м
12 450 90,0 5,00 80 32 9250 4 3,8 1,2 4,0 0,8 0,09 32 600 150,0 2,75 210 36 17760 60 5,0 1,8 6,0 1,0 0,12 52 820 102,5 3,50 234 33 42032 15 7,0 1,3 7,5 1,1 0,20 72 380 152,0 2,00 180 90 14900 34 3,5 2,0 4,0 2,2 0,10 92 560 100,0 6,00 90 40 18648 20 4,8 1,6 5,0 1,4 0,15
Таблица 4.10 – Исходные данные к заданию 3 для варианта 10 (схема 10, рисунок 4.5)
Учебный шифр
t, мм
z1, шт.
z2, шт.
mn, мм
z3, шт.
z4, шт.
n4, об/мин
P4, кВт
m1, кг
m2, кг
m3, кг
m4, кг
i4, м
11 12,700 15 75 1,5 30 120 149,0 1,2 1,0 4 1,2 5 0,20 31 9,525 26 65 2,0 45 180 298,0 2,0 1,8 4 1,6 6 0,30 51 15,875 18 113 4,0 28 88 74,5 4,0 2,0 8 2,8 7 0,40 71 9,525 31 62 5,0 21 84 92,5 4,0 3,0 5 2,0 7 0,45 91 50,800 20 80 10,0 32 160 37,0 25,0 5,0 12 4,0 16 0,55
30
11
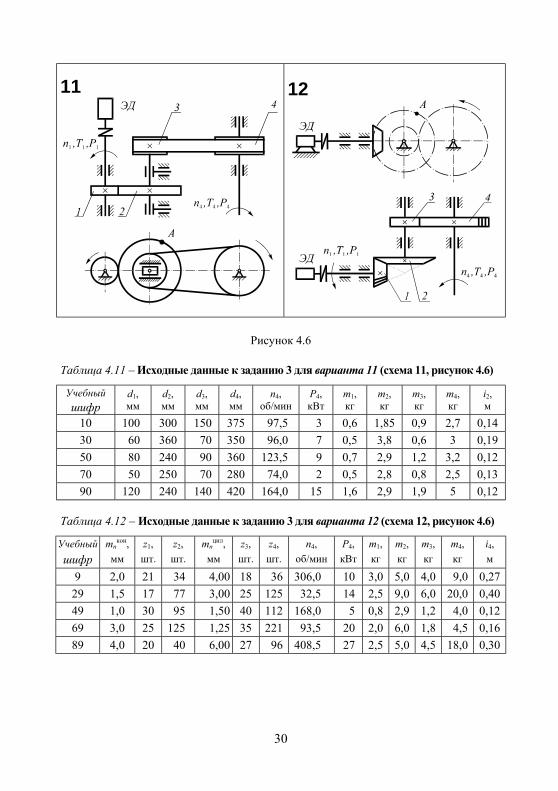
12
Рисунок 4.6
Таблица 4.11 – Исходные данные к заданию 3 для варианта 11 (схема 11, рисунок 4.6)
Учебный шифр
d1, мм
d2, мм
d3, мм
d4, мм
n4, об/мин
P4, кВт
m1, кг
m2, кг
m3, кг
m4, кг
i2, м
10 100 300 150 375 97,5 3 0,6 1,85 0,9 2,7 0,14 30 60 360 70 350 96,0 7 0,5 3,8 0,6 3 0,19 50 80 240 90 360 123,5 9 0,7 2,9 1,2 3,2 0,12 70 50 250 70 280 74,0 2 0,5 2,8 0,8 2,5 0,13 90 120 240 140 420 164,0 15 1,6 2,9 1,9 5 0,12
Таблица 4.12 – Исходные данные к заданию 3 для варианта 12 (схема 12, рисунок 4.6)
Учебный шифр
mnкон, мм
z1, шт.
z2, шт.
mnцил, мм
z3, шт.
z4, шт.
n4, об/мин
P4, кВт
m1, кг
m2, кг
m3, кг
m4, кг
i4, м
9 2,0 21 34 4,00 18 36 306,0 10 3,0 5,0 4,0 9,0 0,27 29 1,5 17 77 3,00 25 125 32,5 14 2,5 9,0 6,0 20,0 0,40 49 1,0 30 95 1,50 40 112 168,0 5 0,8 2,9 1,2 4,0 0,12 69 3,0 25 125 1,25 35 221 93,5 20 2,0 6,0 1,8 4,5 0,16 89 4,0 20 40 6,00 27 96 408,5 27 2,5 5,0 4,5 18,0 0,30

31
13
14
Рисунок 4.7
Таблица 4.13 – Исходные данные к заданию 3 для варианта 13 (схема 13, рисунок 4.7)
Учебный шифр
d1, мм
d2, мм
mn, мм
z3, шт.
z4, шт.
n4, об/мин
P4, кВт
m1, кг
m2, кг
m3, кг
m4, кг
i4, м
08 60 180 2,00 36 144 242,0 5 2,0 7 2,5 10 0,25 28 80 320 2,75 28 88 58,0 6 3,0 9 3,2 12 0,30 48 120 600 5,00 20 120 32,0 29 4,0 15 4,5 20 0,40 68 90 540 4,00 25 125 24,5 10 3,5 14 4,0 18 0,35 88 70 140 2,50 32 144 164,5 4 2,5 6 3,0 16 0,32
Таблица 4.14 – Исходные данные к заданию 3 для варианта 14 (схема 14, рисунок 4.7)
Учебный шифр
t, мм
z1, шт.
z2, шт.
mn, мм
z3, шт.
z4, шт.
n4, об/мин
P4, кВт
m1, кг
m2, кг
m3, кг
m4, кг
i1, м
07 9,525 68 17 3,0 57 18 9200 1 5 1,0 6 1,5 0,20 27 12,700 90 20 2,5 125 25 64800 2 10 1,6 14 3,0 0,60 47 15,875 104 26 6,0 126 20 24700 9 12 2,8 18 4,0 0,70 67 19,050 64 18 4,0 122 27 23700 4 11 2,7 12 3,0 0,65 87 12,700 60 30 5,5 84 30 16130 6 7 3,0 10 4,0 0,25
32
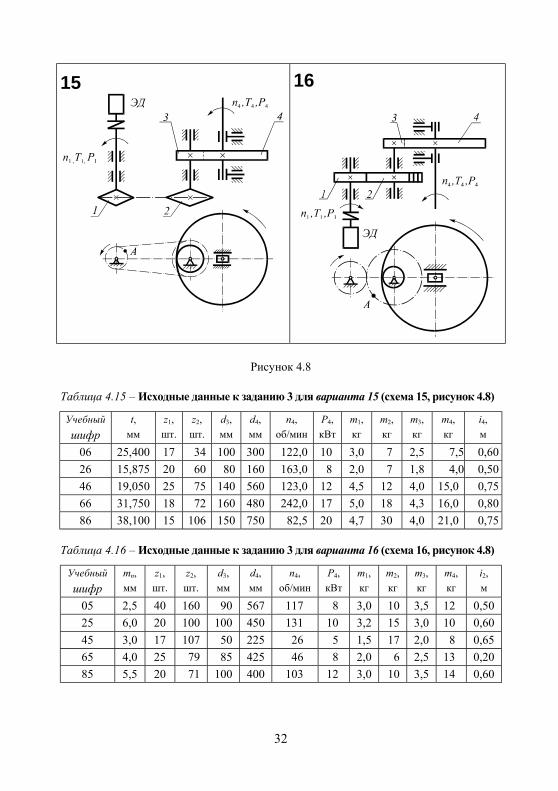
15
16
Рисунок 4.8
Таблица 4.15 – Исходные данные к заданию 3 для варианта 15 (схема 15, рисунок 4.8)
Учебный шифр
t, мм
z1, шт.
z2, шт.
d3, мм
d4, мм
n4, об/мин
P4, кВт
m1, кг
m2, кг
m3, кг
m4, кг
i4, м
06 25,400 17 34 100 300 122,0 10 3,0 7 2,5 7,5 0,60 26 15,875 20 60 80 160 163,0 8 2,0 7 1,8 4,0 0,50 46 19,050 25 75 140 560 123,0 12 4,5 12 4,0 15,0 0,75 66 31,750 18 72 160 480 242,0 17 5,0 18 4,3 16,0 0,80 86 38,100 15 106 150 750 82,5 20 4,7 30 4,0 21,0 0,75
Таблица 4.16 – Исходные данные к заданию 3 для варианта 16 (схема 16, рисунок 4.8)
Учебный шифр
mn, мм
z1, шт.
z2, шт.
d3, мм
d4, мм
n4, об/мин
P4, кВт
m1, кг
m2, кг
m3, кг
m4, кг
i2, м
05 2,5 40 160 90 567 117 8 3,0 10 3,5 12 0,50 25 6,0 20 100 100 450 131 10 3,2 15 3,0 10 0,60 45 3,0 17 107 50 225 26 5 1,5 17 2,0 8 0,65 65 4,0 25 79 85 425 46 8 2,0 6 2,5 13 0,20 85 5,5 20 71 100 400 103 12 3,0 10 3,5 14 0,60

33
17
18
Рисунок 4.9
Таблица 4.17 – Исходные данные к заданию 3 для варианта 17 (схема 17, рисунок 4.9)
Учебный шифр
mn, мм
z1, шт.
z2, шт.
z3, шт.
z4, шт.
n4, об/мин
P4, кВт
m1, кг
m2, кг
m3, кг
m4, кг
i2, м
04 3,0 20 142 17 68 104,0 2 2 10 2,5 8 0,20 24 5,0 17 107 20 63 74,5 3 3 12 2,5 7 0,25 44 4,0 25 140 19 53 94,4 6 4 15 3,0 7 0,30 64 6,0 23 115 20 71 55,0 28 5 20 4,0 12 0,70 84 4,5 20 80 17 85 36,5 32 4 12 5,0 20 0,30
Таблица 4.18 – Исходные данные к заданию 3 для варианта 18 (схема 18, рисунок 4.9)
Учебный шифр
mn, мм
z1, шт.
z2, шт.
t, мм
z3, шт.
z4, шт.
n4, об/мин
P4, кВт
m1, кг
m2, кг
m3, кг
m4, кг
i2, м
03 2,00 40 112 44,45 25 79 83,0 10 3,0 6 4 12 0,08 23 4,00 30 75 50,80 20 80 148,0 27 4,0 8 5 18 0,10 43 2,75 25 79 19,05 30 150 62,0 8 2,0 5 3 12 0,06 63 3,00 30 120 31,75 30 135 54,5 12 3,5 8 4 16 0,12 83 6,00 17 38 38,10 27 96 371 19 2,5 7 3 10 0,11

34
19
20
Рисунок 4.10
Таблица 4.19 – Исходные данные к заданию 3 для варианта 19 (схема 19, рисунок 4.10)
Учебный шифр
d1, мм
d2, мм
t, мм
z3, шт.
z4, шт.
n4, об/мин
P4, кВт
m1, кг
m2, кг
m3, кг
m4, кг
i3, м
02 240 80 50,80 45 16 6132 10 7 2,0 12 4 0,12 22 400 100 19,05 45 20 13261 27 10 2,5 20 6 0,30 42 375 75 44,45 57 18 46464 30 8 1,5 22 5 0,35 62 540 90 12,70 100 25 17520 25 9 2,7 30 6 0,70 82 910 130 31,75 107 30 73560 15 15 3,0 21 7 0,35
Таблица 4.20 – Исходные данные к заданию 3 для варианта 20 (схема 20, рисунок 4.10)
Учебный шифр
mn, мм
z1, шт.
z2, шт.
d3, мм
d4, мм
n4, об/мин
P4, кВт
m1, кг
m2, кг
m3, кг
m4, кг
i1, м
01 3,0 80 20 250 70 10480 6 8 2 4 1,5 0,12 21 2,5 95 30 180 80 21315 4 10 3 4 2,0 0,20 41 4,0 140 25 320 90 59790 3 15 4 7 2,5 0,25 61 5,0 107 17 400 75 37295 5 18 3 5 1,6 0,30 81 3,5 90 32 284 90 8625 8 15 5 10 3,0 0,28

35
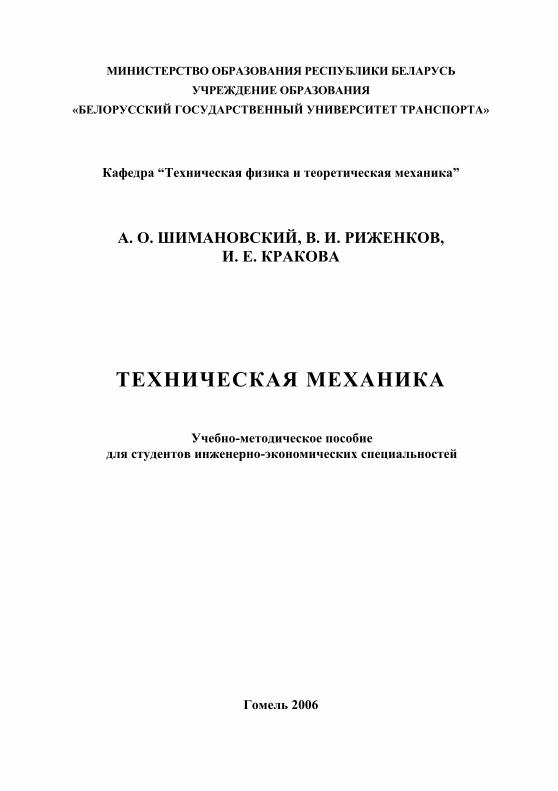
4.2 Пример расчета механизма
Выполнить расчеты в соответствии с заданием 3 контрольной работы для механизма, изображенного на рисунке 4.11.
Рисунок 4.11
Дано : Число зубьев ведущей звездочки z1 = 20. Число зубьев ведомой звездочки z2 = 80. Шаг цепи t = 12,7 мм. Число зубьев шестерни z3 = 18. Число зубьев колеса z4 = 90. Модуль зацепления mn = 3 мм. Массы звездочек m1 = 0,8 кг, m2 = 4 кг. Массы зубчатых колес m3 = 1,2 кг, m4 = 5 кг. Радиус инерции ведомой звездочки i2 = 0,4 м. Радиус инерции зубчатого колеса i4 = 0,5 м. Ведущую звездочку и шестерню считаем сплошными однородными ци-
линдрами.
Частота вращения ведомого (выходного) вала миноб1454 =n .
Мощность на ведомом (выходном) валу P4 = 12 кВт. Расчетное время работы передачи Lh = 30000 часов. Допускаемое касательное напряжение при кручении вала [τ] = 14 МПа.

36
Решение 1 Механическая передача имеет две ступени. Первая ступень – цепная
передача, вторая – зубчатая прямозубая передача. Общее передаточное отношение механической передачи
зцuuu = , где uц – передаточное отношение цепной передачи,
42080
1
2ц ===
zzu ;
uз – передаточное отношение зубчатой передачи,
51890
3
4з ===
zzu .
Тогда 2054 =⋅=u раз.
Делительные диаметры ведущей и ведомой звездочек цепной передачи:
i
i
z
td°
= 180sin;
18,81
20180sin
7,121 =
°=d мм; 49,323
80180sin
7,122 =
°=d мм.
Делительные диаметры шестерни и колеса зубчатой передачи определим по формуле
ini zmd = . Имеем: для шестерни d3 = 3 ⋅ 18 = 54 мм, для колеса d4 = 3 ⋅ 90 = 270 мм.
2 При помощи известных передаточных отношений определим частоты вращения валов передачи.
Частота вращения ведущего вала
миноб29002014541 =⋅== unn .
Частота вращения промежуточного вала
миноб7254
29005145ц1
з43,2 ==⋅=== ununn .
Определяем угловые скорости валов механической передачи:
срад7,30369,30330
290030
11 ==⋅π=
π=ω
n ;
срад7692,7530
72530
3,23,2 ==⋅π=
π=ω
n;

37
срад2,1518,1530
14530
44 ==⋅π=
π=ω
n .
Выполним обязательную проверку. Скорость точки В на делительной окружности ведущей звездочки равна
скорости точки А на делительной окружности ведомой звездочки: vA = vB. Тогда выполняется соотношение
2222,311 dd ω
=ω , или Av=ω=ω 22,311 rr .
Отсюда получаем
срад76
3235,00812,07,303
2
112
112,3 =⋅=
ω=
ω=ω d
dr
r .
Аналогично можно записать:
224432,3 dd ω
=ω
, или Cv=ω=ω 4433,2 rr .
Тогда
срад2,15
27,0054,076
4
32,3
4
32,34 =⋅=
ω=
ω=ω d
dr
r.
Вывод: полученное значение угловой скорости ведомого вала ω4 соответ-ствует заданному – задача определения угловых скоростей валов решена правильно.
3 Определим линейную скорость и линейное ускорение точки А, находя-щейся на делительной окружности ведомой звездочки:
см3,12
23235,07622,3 =⋅=ω= rAv .
В общем случае полное ускорение точки тела, вращающегося вокруг не-подвижной оси, слагается из двух составляющих – касательного и нормаль-ного ускорений:
nAAA aaa += τ .
Так как угловая скорость вала постоянна, то угловое ускорение равно ну-лю и 0=τ
Aa . Тогда полное ускорение точки А равно нормальному nAA aa = .
В итоге 22
222,3 c
м3,9322
3235,076 =⋅=ω== raa nAA .
4 Определим потребную мощность электродвигателя по формуле
η== 41потрэл.
РРP ,
38
где η – коэффициент полезного действия (КПД) передачи. Коэффициент полезного действия передачи определяется по формуле
3зц пηηη=η ,
где цη – КПД цепной передачи, рекомендуется принимать 94,0ц =η ;
зη – КПД прямозубой зубчатой передачи, принимаем 98,0з =η ;
пη – КПД одной пары подшипников, 99,0п =η ;
894,099,098,094,0 3 =⋅⋅=η ,
42,13894,012
1потрэл. === РP кВт = 13420 Вт.
По каталогу электродвигателей (приложение А) выбираем двигатель асинхронный трехфазный закрытого обдуваемого исполнения серии 4А160S2, имеющий ближайшую большую мощность к расчетному значению и ближайшую частоту вращения. Синхронная частота вращения подобран-ного электродвигателя 3000 мин/об , мощность 15 кВт, коэффициент скольжения s = 2,1 %. Определим частоту вращения вала выбранного элек-тродвигателя с учетом скольжения:
2937)021,01(30001эл =−== nn мин/об . Расхождение с требуемым значением
%4%28,1%1002900
29002937 <=− .
Замечание – Допускаемое отклонение действительной частоты вращения от по-требной – до 4 %.
5 Для расчета крутящих моментов на валах передачи применяем формулу
i
ii
PMω
= .
Крутящий момент на ведущем валу
мН19,447,303
134201
11 ⋅==
ω=
PM .
Мощность на промежуточном валу 36,1299,094,042,13 22
ц13,2 п =⋅⋅=ηη= PP кВт = 12360 Вт.
Тогда мН63,16276
123603,2
3,23,2 ⋅==
ω=
PM .
На ведомом валу мН47,7892,15
12004
44 ⋅==
ω=
PM .

39
Определим минимально необходимые диаметры валов из расчета на кру-чение по пониженным допускаемым напряжениям [τ] = 14 МПа.
Условие прочности вала: ][τ≤=τρW
M ,
где ρW – полярный момент сопротивления площади поперечного сечения ва-
ла; для сплошного круглого поперечного сечения 16
3dW π=ρ .
Подставляя значения, получаем
[ ]τ≤π
=τ 316
dM , 3
][16
τπ= i
iM
d .
Диаметр ведущего вала
мм.25,2м0252,0101419,44163
61 ==⋅⋅π
⋅=d
Диаметр промежуточного вала
мм.,983м0389,01014
63,16216363,2 ==
⋅⋅π⋅=d
Диаметр ведомого вала
мм.66м066,01014
47,78916364 ==
⋅⋅π⋅=d
6 Подшипники качения для валов механической передачи выбираем по динамической грузоподъемности, которая определяется по формуле
pLFC экв= , (4.1)
где Fэкв – эквивалентная нагрузка, приходящаяся на один подшипник; р – показатель степени, равный 3 для шариковых подшипников и 3,33
для роликовых; L – требуемая долговечность, млн оборотов. Требуемая долговечность в млн оборотов определяется по формуле
61060nLL h ⋅= ,
где hL – требуемая долговечность передачи в часах. В соответствии с зада-нием передача рассчитывается на 30000 часов работы;
n – частота вращения вала, для которого подбирается подшипник. Подставляя полученные ранее значения частот, получаем:
для ведущего вала 522010
2900603000010
603000066
11 =⋅⋅=
⋅=
nL млн об;

40
промежуточного вала 130510
725603000063,2 =⋅⋅=L млн об;
ведомого вала 26110
145603000064 =⋅⋅=L млн об.
Для вала, на котором установлена цепная передача, эквивалентную на-грузку можно определить по эмпирической формуле
tFF 4,0экв = , где tF – окружная сила, действующая в цепной передаче,
vPFt = ,
P – передаваемая мощность, Вт; v – скорость цепи, м/c. Скорость движения цепи
60nzt=v ,
где n – частота вращения звездочки, мин/об ; z – число зубьев звездочки; t – шаг цепи, м. Для цилиндрической зубчатой передачи эквивалентную нагрузку можно
рассчитать по формуле rFF 1,1экв = ,
где rF – радиальная сила, действующая в зубчатом зацеплении прямозубых цилиндрических колес,
wtr FF α= tg , Ft – окружная сила, действующая в зубчатом зацеплении,
ii
t dMF 2
= ,
αw – стандартный угол зацепления, αw = 20°. Для ведущего вала, на котором установлена ведущая звездочка цепной
передачи, имеем:
скорость движения цепи см28,12
600127,0202900 =⋅⋅==
6011 tznv ;
окружная сила 109328,12
134201 === vPFt Н;
эквивалентная нагрузка 43710934,04,0экв1 =⋅== tFF Н.

41
На промежуточном валу установлены ведомая звездочка цепной переда-чи и шестерня цилиндрической прямозубой передачи. Поэтому эквивалент-ную нагрузку определяем путем суммирования:
зубчэкв
цепнэквэкв2,3 FFF += . (4.2)
Выше получено, что 437цепнэкв =F H.
Определим эквивалентную нагрузку на подшипник от цилиндрической зубчатой передачи.
Окружная сила в зубчатом зацеплении 6023054,0
63,162223
3 =⋅== dM
Ft Н.
Радиальная сила 3,219220tg6023tg =⋅=α= owtr FF Н.
Тогда 24123,2192,11,1зубчэкв =⋅== 1rFF Н.
Подставляя найденные значения в формулу (4.2), получаем 28492412437экв2,3 =+=F Н.
Эквивалентная нагрузка для подшипников ведомого вала, на котором ус-тановлено зубчатое колесо цилиндрической зубчатой передачи,
2412зубчэкв4экв == FF Н.
Замечание – Для конической зубчатой передачи эквивалентную нагрузку можно определить по эмпирической формуле
rFF 5,1экв = , где Fr – радиальная сила, действующая в зубчатом зацеплении прямозубых кониче-
ских колес. Радиальная сила для шестерни
1costg δα= wtr FF , для колеса
2costg δα= wtr FF ,
где 1δ , 2δ – углы делительного конуса, 21 90 δ−=δ o , uarctg2=δ . Для ременной передачи эквивалентную нагрузку можно определить по эмпири-
ческой формуле tFF 4,1экв = ,
где Ft – окружная сила, действующая в ременной передаче, i
it d
MF 2= .
Для фрикционной передачи эквивалентная нагрузка nFF =экв , причем сила прижатия катков фрикционной передачи определяется по формуле
fFkF t
n = ,
где k – коэффициент запаса сцепления; для стальных колес рекомендуется прини-мать k = 1,2;

42
f – коэффициент трения; для стальных колес рекомендуется принимать f = 0,15 … 0,25; при обильной смазке полагают f = 0,01.
Таким образом, подставляя значения в формулу (4.1), получаем требуе-мую динамическую грузоподъемность подшипников для ведущего вала:
75815220437 31экв11 === p LFC Н = 7,6 кН.
Из каталога подшипников для установки ведущего вала на опорах вра-щения по диаметру посадочного отверстия внутреннего кольца и динамиче-ской грузоподъемности выбираем радиальный шарикоподшипник особо лег-кой серии № 106. Его основные размеры d = 30 мм, D = 55 мм, B = 13 мм. Динамическая грузоподъемность C превышает требуемую и равна 13,3 кН.
Требуемая динамическая грузоподъемность подшипников для промежу-точного вала
3113413052849 33,2экв2,33,2 === p LFC Н = 31,13 кН.
Из каталога подшипников для установки промежуточного вала на опорах вращения по диаметру посадочного отверстия внутреннего кольца d = 40 мм и динамической грузоподъемности выбираем радиальный шарикоподшип-ник легкой серии № 208.
Замечание – При выборе руководствовались тем, что при d = 40 мм подшипник особо легкой серии № 108 имеет динамическую грузоподъемность C = 16,8 кН, что ниже требуемой. Динамическая грузоподъемность подшипника легкой серии № 208 C = 32 кН, средней серии № 308 C = 41 кН. Следовательно, ближайшей большей ди-намической грузоподъемностью обладает подшипник легкой серии № 208. Его ос-новные размеры d = 40 мм, D = 80 мм, B = 18 мм.
Требуемая динамическая грузоподъемность подшипников для ведомого вала
154142612412 34экв44 === p LFC Н = 15,4 кН.
Из каталога подшипников для установки ведущего вала на опорах вра-щения по диаметру посадочного отверстия внутреннего кольца и динамиче-ской грузоподъемности выбираем радиальный шарикоподшипник особо лег-кой серии № 114. Его основные размеры d = 70 мм, D = 110 мм, B = 20 мм. Динамическая грузоподъемность C превышает требуемую и равна 37,7 кН.
7 Определим кинетическую энергию системы при установившемся ре-жиме работы механической передачи:
4321 TTTTT +++= ,

43
где Ti – кинетическая энергия соответствующих зубчатых колес, шкивов, катков, звездочек.
Тела системы совершают вращательные движения относительно непод-вижных осей. В этом случае кинетическая энергия определяется по формуле
2
2ii
iJT ω
= ,
где iJ – момент инерции тела относительно оси вращения, кг⋅м2. Определим моменты инерции тел, составляющих механическую передачу. Ведущую звездочку в соответствии с заданием считаем сплошным одно-
родным диском радиусом
04059,02
08118,021
1 ===dR м,
00066,0204059,08,0
2
221
11 =
⋅==
RmJ кг⋅м2.
Для ведомой звездочки задан радиус инерции 64,04,04 22
222 =⋅== imJ кг⋅м2. Шестерню считаем однородным сплошным цилиндром и момент инер-
ции шестерни определяем по формуле
2
2
333 Rm
J = , где 027,02054,0
23
3 ===d
R м,
00044,02027,02,1
2
22
333 =
⋅==
RmJ кг⋅м2.
Для ведомого колеса задан радиус инерции
25,15,05 22444 =⋅== imJ кг⋅м2.
Кинетическая энергия системы
( )( )( )( ) .Дж425,20242,1525,17600044,064,07,30300066,0
21
21
2222222
244
22,332
211
244
233
222
211
=⋅+⋅++⋅=
=ω+ω++ω=ω
+ω
+ω
+ω
= JJJJJJJJT
Находим момент инерции механизма, приведенный к его ведущему звену,
0439,07,303
425,20242222
11 =
⋅=
ω=
TJ кг⋅м2.
44
5 КОНТРОЛЬНЫЕ ВОПРОСЫ ПО КУРСУ «ТЕХНИЧЕСКАЯ МЕХАНИКА»
1 При поступательном движении вагона его кузов можно рассматривать: а) как материальную точку; б) систему материальных точек. 2 В каком случае не учитывается деформация тела: а) при исследовании равновесия; б) расчете на жесткость. 3 Укажите признаки уравновешивающей силы: а) сила, производящая такое же действие, как данная система сил; б) сила, равная по величине равнодействующей и направленная в про-
тивоположную сторону. 4 Чему станет равна эквивалентна система сил, если к ней добавить урав-
новешивающую силу? 5 При каком значении угла между линиями действия двух сил P и F
величина их равнодействующей определяется по формуле:
а) 22 FPR += ; б) FPR += ; в) FPR −= . 6 Почему силы действия и противодействия не могут взаимно уравнове-
шиваться: а) эти силы не равны по модулю; б) силы не направлены по одной прямой; в) силы не направлены в противоположные стороны; г) силы приложены к разным телам. 7 При каком значении угла α между силой и осью проекция силы на эту
ось равна нулю: а) α = 90°; б) α = 0°; в) α = 180°. 8 В каком случае задача о равновесии тела под действием плоской сис-
темы сходящихся сил является статически определимой: а) когда одна сила неизвестна и по величине и по направлению; б) неизвестны численные значения двух сил; в) неизвестны численные значения трех сил. 9 Для того, чтобы полностью определить эффект действия на тело пары
сил, надо знать: а) величину силы и плечо пары; б) произведение значения силы на плечо пары и направления сил.
45
10 Пару сил можно уравновесить: а) двумя непараллельными равными по модулю силами; б) двумя параллельными противоположно направленными равными по
модулю силами; в) двумя параллельными различными по модулю противоположно на-
правленными силами. 11 Момент пары сил равен 10 Н⋅м, плечо пары 0,2 м. Определить, каковы
значения сил пары. Как изменятся эти значения, если плечо увеличить в два раза при сохранении момента?
12 Пары сил действуют в плоскостях, перпендикулярных одной прямой. Можно ли их алгебраически складывать?
13 Момент силы относительно оси равен нулю, если: а) сила параллельна оси; б) линия действия силы пересекает ось; в) сила и ось расположены в одной плоскости. 14 Зависят ли величина и направление главного вектора от положения
центра приведения? 15 Зависят ли величина и направление главного момента от положения
центра приведения? 16 В каком из названных случаев главный вектор системы сил совпадает
с ее равнодействующей: а) если главный момент не равен нулю; б) главный момент равен нулю; в) главный момент и главный вектор противоположно направлены. 17 При каком значении главного вектора R и главного момента OM
система сил находится в равновесии: а) 0;0 =≠ OMR ; б) 0;0 ≠≠ OMR ; в) 0;0 == OMR ; г) 0;0 ≠= OMR . 18 Можно ли определить алгебраическую сумму моментов сил относи-
тельно некоторой точки О, если задана только равнодействующая этих сил и ее плечо относительно этой точки?
19 Может ли центр тяжести тела лежать за пределами его периметра? 20 Если точки А, В и С располагаются на одной прямой, достаточно ли
для решения задачи о равновесии тела уравнений: ;0=∑ AiM ;0=∑ BiM
0=∑ CiM ?
46
21 Сколько независимых уравнений равновесия можно составить для те-ла, на которое действует плоская система параллельных сил:
а) четыре уравнения равновесия; б) от пяти до восьми в зависимости от модулей, точек приложения и
направления сил, приложенных к телу, равновесие которого рас-сматривается;
в) два уравнения. 22 Как изменится полярный момент инерции круглого сечения относи-
тельно оси, проходящей через его центр тяжести, при увеличении диаметра в два раза:
а) увеличится в два раза; б) увеличится в четыре раза; в) увеличится в шестнадцать раз. 23 Чему равен полярный момент инерции круглого сечения, если его
осевой момент инерции относительно центральной оси составляет 200 см4: а) 100 см4; б) 200 см4; в) 400 см4. 24 Какая деформация возникла в теле, если после снятия нагрузки раз-
меры и форма тела полностью восстановились: а) упругая деформация; б) пластическая деформация; в) восстановительная деформация. 25 Нормальная работа зубчатого механизма была нарушена из-за воз-
никновения слишком больших упругих перемещений валов. Почему нару-шилась нормальная работа передачи:
а) из-за недостаточной прочности валов; б) недостаточной жесткости валов; в) недостаточной устойчивости валов. 26 Велосипедная спица резко искривилась под действием сжимающей
силы. Почему произошло изменение прямолинейной формы спицы: а) из-за недостаточной прочности; б) недостаточной жесткости; в) недостаточной устойчивости. 27 К стержню приложена система сил, лежащих в одной плоскости с
осью стержня. Укажите, сколько внутренних силовых факторов может воз-никнуть в его поперечных сечениях:
а) шесть – три составляющие главного вектора и три составляющие главного момента;
б) три – две составляющие силы и один момент; в) количество внутренних силовых факторов зависит от числа внешних сил.
47
28 Изменятся ли значения внутренних силовых факторов в зависимости от того, будут они вычислены по внешним силам, расположенным слева от сечения или справа от него?
29 Какая составляющая напряжения характеризует сопротивление час-тиц материала сдвигу:
а) нормальная составляющая σ ; б) касательная составляющая τ . 30 Зависит ли значение напряжения, возникающего в поперечном сече-
нии статически определимого стержня от материала, из которого он изго-товлен?
31 В деталях из одинакового материала (сталь Ст3) оказалось, что на-пряжения растяжения σ, среза τср и смятия σсм численно равны. Какое из этих напряжений наиболее опасно?
32 Диаметр заклепки увеличился в два раза. Как изменится расчетное напряжение среза:
а) уменьшится в четыре раза; б) увеличится в два раза; в) уменьшится в два раза. 33 Во сколько раз изменится допускаемая нагрузка на сварное соедине-
ние, если катет сварного шва уменьшить вдвое: а) уменьшится в четыре раза; б) уменьшится в два раза; в) увеличится в два раза. 34 Можно ли считать, что алгебраическая сумма моментов внешних сил
(вращающих моментов) равна нулю, если вал вращается равномерно? 35 На вращающемся равномерно валу установлены ведущий и ведомый
шкивы. На ведомом шкиве вращающий момент M2 = 1000 Н⋅м. Не учитывая трение в подшипниках, определить значение момента M1 на ведущем шкиве.
36 Изменяются ли расстояния между поперечными сечениями скручи-ваемого вала?
37 Справедлив ли закон Гука, если напряжение превышает предел про-порциональности материала, но меньше предела текучести?
38 Зависит ли угол поворота сечения вала от материала, из которого он изготовлен?
39 Как изменятся максимальные напряжения в поперечных сечениях ва-ла, при его кручении, если диаметр увеличится в два раза:
а) увеличится в два раза; б) уменьшится в два раза; в) уменьшится в восемь раз; г) уменьшится в четыре раза.

48
40 В поперечном сечении балки возникли изгибающий момент и попе-речная сила. Укажите вид изгиба:
а) чистый изгиб; б) поперечный изгиб; в) моментно-поперечный изгиб. 41 Поперечные силы в сечениях на расстоянии z от концов балки выра-
жены уравнениями: .; 211 qzPQPQ +−=−= Укажите, какими линиями очерчены эпюры поперечных сил:
а) в обоих случаях прямыми линиями, параллельными оси эпюры; б) прямой, параллельной оси эпюры, и прямой, наклоненной к оси
эпюры; в) двумя наклонными прямыми; г) наклонной прямой и квадратной параболой. 42 Изгибающие моменты в сечении на расстоянии z от концов балки вы-
ражены уравнениями: .;2
из2
2из1 MMqzM == Укажите, какими линиями
очерчены эпюры изгибающих моментов: а) наклонной прямой и квадратной параболой; б) квадратной параболой и прямой, параллельной оси эпюры; в) двумя наклонными прямыми. 43 Можно ли считать, что слой балки, находящийся между растянутыми
и сжатыми волокнами, сохраняет свою первоначальную длину при ее де-формации?
44 Справедливо ли допущение о том, что поперечные сечения остаются плоскими при изгибе балки?
45 Зависят ли нормальные напряжения в поперечных сечениях балки при изгибе от формы этих сечений?
46 Во сколько раз уменьшатся нормальные напряжения в прямоугольном сечении изгибаемой балки, если ее высота увеличится в два раза:
а) в два раза; б) в четыре раза; в) в восемь раз. 47 Модуль продольной упругости чугуна меньше, чем стали. Сравните
максимальную величину прогибов одинаковых балок из стали и чугуна, под-вергающихся действию одинаковых сил:
а) у стальной балки прогиб больше; б) прогибы одинаковы; в) у чугунной балки прогиб больше. 48 Может ли разрушиться деталь, если она работает при переменных на-
пряжениях, которые меньше предела текучести?

49
49 По какой характеристике материала определяют допускаемое напря-жение при переменных внешних силах:
а) по пределу прочности; б) пределу выносливости; в) пределу текучести. 50 Какую характеристику движения поездов можно определить по карте
железнодорожных линий без привлечения иной информации: а) траектории движения поездов; б) расстояния между поездами; в) путь, проходимый поездами. 51 Можно ли определить траекторию движения точки, если известно как
изменяются во времени ее координаты в декартовой системе отсчета? 52 Можно ли определить траекторию движения точки, если задан ее путь
как функция времени? 53 При каком способе задания движения точки необходимо дополни-
тельно указывать ее траекторию: а) при естественном способе задания движения; б) любом способе задания движения; в) координатном способе задания движения. 54 Определите величину и угол, который составляет с осью х скорость
точки, если ее проекции на оси координат: см4;
см3 == yx vv .
55 Точка равномерно движется по окружности. Можно ли утверждать, что полное ускорение этой точки равно нулю?
56 Какая составляющая ускорения точки характеризует изменение моду-ля вектора скорости:
а) нормальное ускорение; б) полное ускорение; в) касательное ускорение. 57 Могут ли при поступательном движении тела траектории его точек
быть кривыми линиями? 58 Какую скорость имеют находящиеся на оси вращения точки тела, со-
вершающего вращательное движение? 59 Можно ли утверждать, что поступательное движение твердого тела
определяется законом движения любой его точки? 60 При вращательном движении твердого тела вокруг неподвижной оси
траектории всех точек, не лежащих на оси вращения, представляют собой: а) прямые линии; б) эллипсы при наличии касательного ускорения и квадратные парабо-
лы при его отсутствии;

50
в) окружности. 61 При плоскопараллельном движении все точки тела описывают траек-
тории, расположенные: а) в пересекающихся плоскостях; б) плоскостях, движущихся вместе с телом; в) параллельных плоскостях. 62 Положение мгновенного центра скоростей тела, совершающего плос-
копараллельное движение, можно определить: а) проведя перпендикуляры к скоростям двух точек тела; б) умножив нормальное ускорение мгновенного центра скоростей на
угловую скорость тела; в) проведя направления векторов скоростей двух точек тела до их пе-
ресечения. 63 Две материальные точки движутся прямолинейно с постоянными
скоростями (10 и 100 см ). Можно ли утверждать, что приложенные к этим
точкам системы сил эквивалентны? 64 Две материальные точки массой 5 и 10 кг падают на поверхность зем-
ли под действием силы тяжести. Сравните значения ускорений этих точек: а) ускорения одинаковы; б) ускорение точки массой 10 кг в два раза больше; в) ускорение точки массой 10 кг в два раза меньше. 65 К двум материальным точкам массой 5 и 15 кг приложены одинако-
вые силы. Сравните значения ускорений этих точек: а) ускорения одинаковы; б) ускорение точки массой 15 кг в три раза больше; в) ускорение точки массой 15 кг в три раза меньше. 66 Чему будет равна работа силы тяжести при перемещении тела c мас-
сой 5 кг на два метра по горизонтальной плоскости? 67 Как изменится вращающий момент, если при одной и той же мощно-
сти уменьшить угловую скорость вала в два раза: а) увеличится в два раза; б) уменьшится в два раза; в) уменьшится в восемь раз. 68 Как изменится кинетическая энергия поступательно движущегося те-
ла, если его скорость возрастет в два раза: а) уменьшится в два раза; б) увеличится в четыре раза; в) увеличится в два раза. 69 Как связаны между собой тела (детали), образующие одно звено?
51
а) подвижно; б) неподвижно. 70 Какие кинематические пары подвергаются большему износу: а) низшие; б) высшие. 71 Какие кинематические пары являются высшими: а) соединение вала с подшипником скольжения; б) сцепление зубьев в зубчатых передачах; в) соединение ползуна и направляющей; г) соединение шариков с дорожкой качения в подшипнике качения. 72 Какое звено является ведущим в кривошипно-ползунном механизме
поршневого компрессора: а) кривошип; б) шатун; в) кулиса; г) ползун. 73 Какое звено является ведущим в кривошипно-ползунном механизме
двигателя внутреннего сгорания: а) кривошип; б) шатун; в) кулиса; г) ползун. 74 Сплав железа с углеродом содержит 1,2 % углерода. Какой это мате-
риал: а) чугун; б) конструкционная сталь; в) инструментальная сталь. 75 Группу Ассура какого класса может образовать в плоском механизме
кинематическая цепь из четырех звеньев и шести кинематических пар: а) первого класса; б) второго класса; в) третьего класса; г) четвертого класса. 76 При действии на ведущее звено механизма уравновешивающей силы
или уравновешивающего момента: а) поддерживается движение механизма; б) механизм приводится в состояние равновесия. 77 Какой вид сварки лучше применить для соединения тонких стальных
листов внахлестку: а) газовую сварку; б) электродуговую сварку;

52
в) контактную сварку. 78 Какие шпонки обеспечивают лучшее центрирование деталей на валу: а) клиновые шпонки; б) призматические шпонки. 79 Какой вид соединений обеспечивает большую точность взаимного
расположения деталей: а) соединение клиновыми шпонками; б) соединение призматическими шпонками; в) шлицевое соединение. 80 Какую резьбу применяют для крепежных соединений: а) треугольную; б) трапецеидальную; в) прямоугольную. 81 Какую резьбу применяют в винтовых парах для передачи движения: а) треугольную; б) трапецеидальную. 82 Винтовые механизмы применяют: а) для преобразования вращательного движения в поступательное; б) преобразования поступательного движения во вращательное; в) преобразования вращательного движения относительно одной оси
во вращательное относительно другой. 83 Как изменится КПД винтовой пары при увеличении угла подъема
винтовой линии при одинаковом значении угла трения: а) КПД увеличится; б) КПД уменьшится; в) КПД не изменится. 84 Укажите, при каких углах подъема винтовой линии λ и углах трения ρ
винтовая пара будет самотормозящейся: а) ρ = 3°; λ = 4°; б) ρ = 6°; λ = 4°; в) ρ = 3°; λ = 6°; г) ρ = 4°; λ = 3°. 85 В каких механизмах возникают большие динамические нагрузки: а) в механизмах возвратно-поступательного движения; б) механизмах вращательного движения. 86 Передаточное число u больше единицы. Какая это передача: а) понижающая; б) повышающая. 87 Может ли нормально работать фрикционная передача, если оба катка
будут вращаться относительно неподвижно закрепленных подшипников?

53
88 Как следует изменить диаметр ведущего катка фрикционной переда-чи, чтобы увеличить угловую скорость ведомого в два раза:
а) уменьшить в два раза; б) увеличить в два раза. 89 Как следует изменить силу нажатия фрикционных цилиндрических
катков, если при передаче одного и того же вращающего момента катки за-менить другими, с диаметрами в два раза больше первоначальных:
а) силу нажатия следует увеличить в два раза; б) силу нажатия следует увеличить в четыре раза; в) силу нажатия следует уменьшить в два раза; г) силу нажатия следует уменьшить в четыре раза. 90 Как называется окружность зубчатого колеса, на которой расстояние
между соседними зубьями равно шагу зуборезного инструмента: а) делительная; б) начальная.
91 Для каких зубчатых передач справедливо выражение 12
2
1zzi =
ωω
= :
а) только для цилиндрических зубчатых; б) только для конических зубчатых; в) для всех видов зубчатых передач. 92 Как изменится угловая скорость ведомого колеса, если увеличится
число его зубьев при неизменном числе зубьев на ведущей шестерне: а) угловая скорость увеличится; б) угловая скорость уменьшится. 93 Могут ли зубчатые колеса обеспечить постоянство мгновенного пере-
даточного отношения, если их модули не равны? 94 Определите число зубьев ведомого колеса, диаметры делительных
окружностей зубчатых колес и межосевое расстояние по следующим дан-ным: число зубьев ведущего колеса 18, передаточное число 2, модуль зацеп-ления 5 мм.
95 Какое минимальное количество зубьев может иметь по условию не-подрезания шестерня при стандартном эвольвентном зацеплении:
а) не менее 9; б) не менее 12; в) не менее 17. 96 Чему равен стандартный угол зацепления αw между касательными к
начальным и делительным окружностям в эвольвентном зубчатом зацепле-нии:
а) этот угол всегда равен 90°; б) 20°; в) 45°; г) 15°.

54
97 Изменится ли угловая скорость ведомого колеса с эвольвентным профи-лем зубьев, если межосевое расстояние увеличить на 0,2 от значения модуля?
98 Какие зубчатые передачи следует рассчитывать на контактную прочность: а) открытые зубчатые передачи; б) закрытые зубчатые передачи. 99 Какой параметр зубчатой передачи влияет на прочность зуба по на-
пряжениям изгиба: а) межосевое расстояние; б) модуль зацепления. 100 Какой параметр зубчатой передачи влияет на прочность зуба по кон-
тактным напряжениям: а) межосевое расстояние; б) модуль зацепления. 101 По какому модулю следует выбирать стандартный режущий инст-
румент для изготовления зубчатого колеса с косыми зубьями: а) по окружному модулю; б) косозубому модулю; в) нормальному модулю. 102 Как изменится величина осевой силы, возникающей в косозубом
зубчатом зацеплении при увеличении угла наклона зуба к образующей дели-тельного цилиндра:
а) осевая сила не изменится; б) осевая сила уменьшится; в) осевая сила увеличится. 103 В каких цилиндрических зубчатых передачах на подшипники не
действует осевая нагрузка: а) в косозубых передачах; б) шевронных передачах; в) прямозубых передачах. 104 Одинакова ли высота зубьев конических зубчатых колес в сечениях,
проведенных на разных расстояниях от вершины конуса: а) высота зубьев одинакова; б) высота зубьев уменьшается по мере приближения к вершине; в) высота зубьев увеличивается по мере приближения к вершине. 105 Можно ли применить коническую зубчатую передачу при угле пере-
сечения осей не равном 90°? 106 Какое звено в червячной передаче является ведущим: а) червяк; б) червячное колесо; в) шестерня.

55
107 Как изменится передаточное число червячной передачи, если при одном и том же числе зубьев число заходов червяка увеличить с 2 до 4:
а) передаточное число увеличится в 2 раза; б) передаточное число увеличится в 4 раза; в) передаточное число уменьшится в 2 раза; г) передаточное число уменьшится в 4 раза. 108 Какая ветвь открытой ременной передачи испытывает при работе
большее натяжение: а) ведущая ветвь; б) ведомая ветвь. 109 Какой размер является основным для выбора приводной цепи цеп-
ной передачи: а) диаметр ролика; б) шаг цепи; в) толщина звеньев цепи. 110 Из какого расчета определяют шаг цепи в цепной передаче: а) из расчета цепи на прочность; б) расчета цепи на износостойкость. 111 Деталь, соединяющая электродвигатель с машиной, работает только
на кручение. Как правильно называется эта деталь: а) вал; б) ось; в) стержень. 112 Может ли быть ось неподвижной? 113 По какому условию прочности следует рассчитывать оси: а) по условию прочности на кручение; б) условию прочности на изгиб; в) условию прочности на совместное действие изгиба и кручения. 114 Две оси, несущие одинаковые нагрузки, изготовлены из стали одной
и той же марки. Одна из этих осей неподвижная, другая – вращающаяся. При равной прочности осей какая из них должна иметь больший диаметр:
а) вращающаяся; б) неподвижная. 115 При каком виде трения скольжения почти полностью отсутствует
износ трущихся поверхностей: а) при полусухом трении; б) сухом трении; в) жидкостном трении. 116 Какое уплотнение подшипникового узла следует применять при
больших скоростях скольжения вала:

56
а) войлочное уплотнение; б) лабиринтное уплотнение. 117 Имеются подшипники со следующими условными номерами: 305,
306, 1306, 307, 1305, 1308. Укажите подшипники, у которых диаметр отвер-стия внутреннего кольца равен 30 мм:
а) у подшипников 305 и 307; б) подшипников 1305 и 1308; в) подшипников 306 и 1306. 118 Можно ли при помощи муфты изменить угловую скорость одного
вала относительно другого? 119 При помощи какой муфты можно компенсировать неточность в рас-
положении геометрических осей валов: а) при помощи упругой втулочно-пальцевой муфты; б) помощи поперечно-свертной муфты; в) помощи втулочной муфты; г) помощи кулачковой расширительной муфты. 120 Могут ли фрикционные муфты ограничивать значение передаваемо-
го момента от ведущего к ведомому валу?
Ответы на контрольные вопросы 1. а). 2. а). 3. б). 4. Нулю. 5. а) o90 ; б) o0 ; в) o180 . 6. г) 7. а). 8. а) и
б). 9. б). 10. б). 11. 50 Н; уменьшится в 2 раза. 12. Можно. 13. а); б); в). 14. Не зависят. 15. Зависят. 16. б). 17. в). 18. Можно. 19. Да. 20. Не мо-гут. 21. в). 22. в). 23. в). 24. а). 25. б). 26. в). 27. б). 28. Не из-менятся. 29. б). 30. Не зависит. 31. Напряжение среза. 32. а). 33. б). 34. Можно. 35. 1000 Нм. 36. Не изменяются. 37. Не справедлив. 38. За-висит. 39. в). 40. б). 41. б). 42. б). 43. Можно. 44. Справедливо. 45. Зависят. 46. б). 47. в). 48. Может. 49. б). 50. а). 51. Можно. 52. Нельзя. 53. а) 54. 5 м /с; ,53o=α где α – угол между вектором скоро-сти и осью х . 55. Нельзя. 56. в). 57. Могут. 58. Равную нулю. 59. Мож-но. 60. в). 61. в). 62. а). 63. Можно. 64. а). 65. в). 66. Нулю. 67. а). 68. б). 69. б). 70. б). 71. б) и г). 72. а). 73. г). 74. в). 75. в) и г). 76. а). 77. в). 78. б). 79. в). 80. а). 81. б). 82. а). 83. а). 84. б) и г). 85. а). 86. а). 87. Не может. 88. б). 89. в). 90. а). 91. в). 92. б). 93. Не могут. 94. 36 шт.; шестерни 90 мм; колеса 180 мм; межосевое расстояние 135 мм. 95. в). 96. б). 97. Не изменится. 98. б). 99. б). 100. а). 101. в). 102. в). 103. б) и в). 104. б). 105. Можно. 106. а). 107. в). 108. а). 109. б). 110. б). 111. а). 112. Может. 113. б). 114. а). 115. в). 116. б). 117. в). 118. Нельзя. 119. а). 120. Могут.

57
ПРИЛОЖЕНИЕ А (справочное)
Электродвигатели асинхронные серии 4А, закрытые обдуваемые (по ГОСТ 19523-81)
Синхронная частота вращения, об/мин
3000 1500 1000 750 Мощность, кВт Типо-
размер s, % н
пTT Типо-
размер s, % н
пTT Типо-
размер s, % н
пTT Типо-
размер s, % н
пTT
0,55 63В2 8,5 71А4 7,3 71В6 10 80В8 9 0,75 71А2 5,9 71В4 7,5 80А6 8,4 90LA8 8,41,1 71В2 6,3 80А4 5,4 80В6 8,0 90LB8 7,01,5 80А2 4,2 80В4 5,8 90L6 6,4 100L8 7,0
1,6
2,2 80В2 4,3 90L4 5,1 100L6 5,1 112МА8 6,03,0 90L2 4,3 100S4 4,4 112МА6 4,7 112М8 5,84,0 100S2 3,3 100L4 4,7 112МВ6 5,1 132S8 4,15,5 100L2 3,4 112М4 3,7 132S2 3,3 132М8 4,1
1,8
7,5 112М2 2,5
2,0
132S4 3,0 132 Мб 3,2
2,0
160S8 2,511,0 132М2 2,3 1,6 132М4 2,8
2,0
160S6 2,7 160М8 2,51,4
15 160S2 2,1 160S4 2,3 160 Мб 2,6 180М8 2,518,5 160М2 2,1 160М4 2,2 180 Мб 2,7 200М8 2,322 180S2 2,0 180S4 2,0 200 Мб 2,8 200L8 2,730 180М2 1,9 180М4 1,9 200L6 2,1 225М8 1,837 200М2 1,9 200М4 1,7 225 Мб 1,8 250S8 1,545 200L2 1,8
1,4
200LA 1,6
1,4
250S6 1,4 250М8 1,455 225М2 1,8 225М4 1,4 250М6 и 280S8 2,275 250S2 1,4 250S4 1,2 280S6 2,0 280М8 2,2
1,2
90 250М2 1,4 250М4 1,3 280 Мб 2,0 315S8 2,0110 280S2 2,0
1,2
280S4 2,3
1,2
315S6 2,0
1,2
315М8 2,01,0
Примечания 1 Пример условного обозначения электродвигателя мощностью 11 кВт, синхрон-
ная частота вращения 1500 об/мин: Электродвигатель 4А132М4У3 2 Значения символов в условных обозначениях: цифра 4 указывает порядковый
номер серии, буква А – род двигателя – асинхронный. Следующие за буквой А числа (двух- или трехзначные) соответствуют высоте оси вращения, мм; буквы L, S и М относятся к установочным размерам по длине станины; буквы А и В – условные обо-значения длины сердечника статора. Цифры 2, 4, 6 и 8 означают число полюсов. По-следние два знака У3 показывают, что двигатель предназначен для эксплуатации в зоне умеренного климата.
3 В графе s указано скольжение, % ; в графе н
пTT даны значения отношения вели-
чин пускового и номинального вращающих моментов.

58
ПРИЛОЖЕНИЕ Б (справочное)
Технические характеристики подшипников качения Б.1 Схемы и размеры, мм,
шарикоподшипников радиальных однорядных:
по ГОСТ 8338-75 по ГОСТ 7242-81
Грузоподъемность, кН Условное обозначение d D В r динамическая C статическая C0
Особо легкая серия 100 – 10 26 8 0,5 4,62 1,96 101 – 12 28 8 0,5 5,07 2,24 104 80104 20 42 12 1 9,36 4,5 105 – 25 47 12 1 11,2 5,6 106 80106 30 55 13 1,5 13,3 6,8 107 – 35 62 14 1,5 15,9 8,5 108 80108 40 68 15 1,5 16,8 9,3 109 – 45 75 16 1,5 21,2 12,2 110 – 50 80 16 1,5 21,6 13,2 111 – 55 90 18 2 28,1 17 112 – 60 95 18 2 29,6 18,3 113 – 65 100 18 2 30,7 19,6 114 – 70 110 20 2 37,7 24,5 115 – 75 115 20 2 39,7 26,0 116 – 80 125 22 2 47,7 31,5 117 – 85 130 22 2 49,4 33,5 118 – 90 140 24 2,5 57,2 39,0 119 – 95 145 24 2,5 60,5 41,5 120 – 100 150 24 2,5 60,5 41,5
Легкая серия 200 80200 10 30 9 1 5,9 2,65 201 80201 12 32 10 1 6,89 3,1 202 80202 15 35 11 1 7,8 3,55 203 80203 17 40 12 1 9,56 4,5 204 80204 20 47 14 1,5 12,7 6,2

59
Продолжение приложения Б Грузоподъемность, кН Условное обозначение d D В r
динамическая C статическая C0
205 80205 25 52 15 1,5 14,0 6,95 206 80206 30 62 16 1,5 19,5 10,0 207 – 35 72 17 2 25,5 13,7 208 80208 40 80 18 2 32,0 17,8 209 80209 45 85 19 2 33,2 18,6
209А – 45 85 19 2 36,4 20,1 210 – 50 90 20 2 35,1 19,8 211 – 55 100 21 2,5 43,6 25,0 212 80212 60 110 22 2,5 52,0 31,0 213 80213 65 120 23 2,5 56,0 34,0 214 – 70 125 24 2,5 61,8 37,5 215 80215 75 130 25 2,5 66,3 41,0 216 – 80 140 26 3 70,2 45,0 217 – 85 150 28 3 83,2 53,0
217А – 85 150 28 3 89,5 56,5 218 80218 90 160 30 3 95,6 62,0 219 – 95 170 32 3,5 108,0 69,5
219А – 95 170 32 3,5 115,0 74,0 220 80220 100 180 34 3,5 124,0 79,0
Средняя серия 300 – 10 35 11 1 8,06 3,75 301 – 12 37 12 1,5 9,75 4,65 302 – 15 42 13 1,5 11,4 5,4 303 – 17 47 14 1,5 13,5 6,65 304 – 20 52 15 2 15,9 7,8 305 – 25 62 17 2 22,5 11,4 306 – 30 72 19 2 28,1 14,6 307 – 35 80 21 2,5 33,2 18,0 308 – 40 90 23 2,5 41,0 22,4 309 – 45 100 25 2,5 52,7 30,0 310 – 50 110 27 3 65,8 36,0 311 – 55 120 29 3 71,5 41,5 312 – 60 130 31 3,5 81,9 48,0 313 – 65 140 33 3,5 92,3 56,0 314 – 70 150 35 3,5 104,0 63,0 315 – 75 160 37 3,5 112,0 72,5 316 – 80 170 39 3,5 124,0 80,0
316К5 – 80 170 39 3,5 130,0 89,0 317 – 85 180 41 4 133,0 90,0 318 – 90 190 43 4 143,0 99,0 319 – 95 200 45 4 153,0 110

60
Продолжение приложения Б Грузоподъемность, кН Условное обозначение d D В r
динамическая C статическая C0
319К5 – 95 200 45 4 161,0 120,0 320 – 100 215 47 4 174,0 132,0
Тяжелая серия 403 – 17 62 17 2 22,9 11,8 405 – 25 80 21 2,5 36,4 20,4 406 – 30 90 23 2,5 47,0 26,7 407 – 35 100 25 2,5 55,3 31,6 408 – 40 110 27 3 63,7 36,5 409 – 45 120 29 3 76,1 45,5 410 – 50 130 31 3,5 87,1 52,0 411 – 55 140 33 3,5 100,0 63,0 412 – 60 150 35 3,5 108,0 70,0 413 – 65 160 37 3,5 119,0 78,1 414 – 70 180 42 4 143,0 105,0 416 – 80 200 48 4 163,0 125,0 417 – 85 210 52 5 174,0 135,0
Б.2 Схемы и размеры, мм, роликоподшипников радиальных
с короткими цилиндрическими роликами (по ГОСТ 8328 – 75):
C C0 Условное обозначение d D В r r1 кН
Легкая узкая серия 32202А 15 35 11 1 0,5 12,5 6,4 32203А 17 40 12 1 0,5 17,2 7,1 32204А 20 47 14 1,5 1,0 25,1 12,632205А 25 52 15 1,5 1,0 28,6 15,232206А 30 62 16 1,5 1,0 38,0 19,632207А 35 72 17 2,0 1,0 48,4 26,532208А 40 80 18 2,0 2 53,9 29,532209А 45 85 19 2,0 2 60,5 35,032210А 50 90 20 2,0 2 64,4 37,5

61
Продолжение приложения Б C C0 Условное обозначение d D В r r1
кН 32211А 55 100 21 2,5 2 84,2 49,0 32212А 60 110 22 2,5 2,5 93,5 53,5 32213А 65 120 23 2,5 2,5 106,0 66,5 32214А 70 125 24 2,5 2,5 119,0 71,0 32215А 75 130 25 2,5 2,5 130,0 81,5 32216А 80 140 26 3 3 138,0 87,0 32217А 85 150 28 3 3 165,0 108,032218А 90 160 30 3 3 183,0 120,032220А 100 180 34 3,5 3,5 251,0 170,0
Средняя узкая серия 32306А 30 72 19 2 2 51,2 26,0 32307А 35 80 21 2,5 2 64,4 35,0 32308А 40 90 23 2,5 2,5 80,9 44,5 32309А 45 100 25 2,5 2,5 99,0 56,0 32310А 50 110 27 3 3 110,0 70,5 32311А 55 120 29 3 3 138,0 87,5 32312А 60 130 31 3,5 3,5 151,0 98,0 32313А 65 140 33 3,5 3,5 183,0 197,032314А 70 150 35 3,5 3,5 205,0 124,032315А 75 160 37 3,5 3,5 242,0 149,032316А 80 170 39 3,5 3,5 260,0 163,032317А 85 180 41 4 4 297,0 190,032318А 90 190 43 4 4 319,0 260,032319А 95 200 45 4 4 374,0 222,032320А 100 215 47 4 4 391,0 250,0
Легкая широкая серия 2505А 25 52 18 1,5 1 34,1 18,8 2506А 30 62 20 1,5 1 38,0 28,0 2508А 40 80 23 2 2 56,1 42,0 2509А 45 85 23 2 2 73,7 45,5 2510А 50 90 23 2 2 78,1 48,5 2511А 55 100 25 2,5 2 99,0 64,0 2512А 60 110 28 2,5 2,5 128,0 85,0 2513А 65 120 31 2,5 2,5 147,0 100,0

62
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ По курсу в целом 1 Аркуша, А. И. Техническая механика: теоретическая механика и сопротивле-
ние материалов: учебник для машиностроительных специальностей техникумов / А. И. Аркуша. – М.: Высшая школа, 1989.– 351 с.
2 Иосилевич, Г. Б. Прикладная механика: учебник для вузов / Г. Б. Иосилевич, Г. Б. Строганов, Г. С. Маслов; под ред. Г. Б. Иосилевича. – М.: Высшая школа, 1989. – 351 с.
3 Иосилевич, Г. Б. Прикладная механика / Г. Б. Иосилевич, П. А. Лебедев, В. С. Стреляев. – М.: Машиностроение, 1985. – 327 с.
4 Ковалев, Н. А. Прикладная механика: учебник для инженерно-технических и инженерно-экономических специальностей вузов / Н. А. Ковалев. – М.: Высшая школа, 1982. – 400 с.
5 Эрдеди, А. А. Теоретическая механика. Сопротивление материалов: учебное пособие для вузов / А. А. Эрдеди, Н. А. Эрдеди. – М.: Высшая школа, 2001. – 317 с.
6 Эрдеди, А. А. Теоретическая механика. Сопротивление материалов: учебное пособие для техникумов / А. А. Эрдеди, Н. А. Эрдеди. – М.: Академия, 2003. – 319 с.
7 Скойбеда, А. Т. Прикладная механика: учебное пособие / А. Т. Скойбеда, А. А. Миклашевич, Е. Н. Левковский; под общ. ред. А. Т. Скойбеды. – Мн.: Вышэй-шая школа, 1997. – 522 с.
По разделу «Теоретическая механика» 1 Бутенин, Н. В. Курс теоретической механики / Н. В. Бутенин, Я. Л. Лунц,
Д. Р. Меркин – СПб.: Изд –во «Лань», 1998.– 736 с. 2 Тарг, С. М. Краткий курс теоретической механики / С. М. Тарг. – М.: Высшая
школа, 1995.– 416 с. 3 Шимановский, А. О. Теоретическая механика. Ч. 1. Статика / А. О. Шиманов-
ский. – Гомель: БелГУТ, 1998.– 72 с.
По разделу «Сопротивление материалов» 1 Александров, А. В. Сопротивление материалов: учебник для вузов / А. В. Алек-
сандров, В. Д. Потапов, Б. П. Державин. – М.: Высшая школа, 1995 .– 560 с. 2 Беляев, Н. М. Сопротивление материалов / Н. М. Беляев.– М.: Наука, 1976.–
608 с. 3 Дубейковский, Е. Н. Сопротивление материалов: учебное пособие для маши-
ностроительных специальностей техникумов / Е. Н. Дубейковский, Е. С. Савушкин. – М.: Высшая школа, 1989. – 351 с.
4 Ефремова, З. Г. Прикладная механика. Ч. 1 / З. Г. Ефремова. – Гомель, 1999. – 111 с.
5 Кинасошвили, Р. С. Сопротивление материалов / Р. С. Кинасошвили. – М.: Высшая школа, 1975. – 384 с.
6 Степин, П. А. Сопротивление материалов: учебник для немашиностроитель-ных специальностей вузов / П. А. Степин. – М.: Высшая школа, 1988 – 367 с.
7 Феодосьев, В. И. Сопротивление материалов: учебник для вузов / В. И. Фео-досьев. – М.: Наука, 1986. – 512 с.

63
8 Сборник задач по сопротивлению материалов / под ред. В. К. Качурина.– М.: Наука, 1970. – 432 с.
По разделу «Теория механизмов и машин» 1 Артоболевский, И. И. Теория механизмов и машин: учебник для втузов /
И. И. Артоболевский. – М.: Наука, 1988. – 639 с. 2 Артоболевский, И. И. Сборник задач по теории механизмов и машин /
И. И. Артоболевский, Б. В. Эдельштейн. – М.: Машиностроение, 1975. – 256 с. 3 Кореняко, А. С. Курсовое проектирование по теории механизмов и машин /
А. С. Кореняко, Л. И. Кременштейн, С. Д. Петровский. – Киев: Вища школа, 1970. – 330 с.
4 Ковалев, Н. А. Теория механизмов и детали машин. Краткий курс: учебник для немашиностроительных специальностей вузов / Н. А. Ковалев. – М.: Высшая школа, 1974. – 319 с.
5 Фролов, К. В. Теория механизмов и механика машин / К. В. Фролов. – М.: Высшая школа, 1998. – 495 с.
По разделу «Детали машин и основы конструирования» 1 Дунаев, П. Ф. Конструирование узлов и деталей машин: учебное пособие для
вузов / П. Ф. Дунаев, О. П. Леликов. – М.: Высшая школа, 2000. – 446 с. 2 Иванов, М. Н. Детали машин: учебник для вузов / под ред. В. А. Финогенова. –
М.: Высшая школа, 2000. – 382 с. 3 Иванов, М. Н. Детали машин. Курсовое проектирование: учебное пособие для
машиностроительных специальностей вузов / М. Н. Иванов, В. Н. Иванов. – М.: Высшая школа, 1975. – 551 с.
4 Чернавский, С. А. Курсовое проектирование деталей машин: учебное пособие для машиностроительных специальностей техникумов / С. А. Чернавский, К. Н. Боков, И. М. Чернин. – М.: Машиностроение, 1987. – 415 с.
5 Чернилевский, Д. В. Курсовое проектирование деталей машин и механизмов / Д. В. Чернилевский. – М.: Высшая школа, 1980. – 240 с.

Учебное издание
ШИМАНОВСКИЙ Александр Олегович РИЖЕНКОВ Виктор Иванович КРАКОВА Ирина Евгеньевна
ТЕХНИЧЕСКАЯ МЕХАНИКА Учебно-методическое пособие
для студентов инженерно-экономических специальностей
Редактор Т .М . Ри з е в с к а я Технический редактор В . Н . Куч е р о в а
Корректор М .П . Дежко
Подписано в печать 28.02.2006 г. Формат 60×84 1/16. Бумага газетная. Гарнитура Таймс. Печать на ризографе.
Усл. печ. л. 3,72. Уч.-изд. л. 4,14. Тираж 350 экз. Зак. № . Изд. № 4250.
Редакционно-издательский отдел УО «БелГУТ», 246653, г. Гомель, ул. Кирова, 34.
ЛИ № 02330/0133394 от 19.07.2004 г.
Типография УО «БелГУТ», 246022, г. Гомель, ул. Кирова, 34. ЛП № 02330/0148780 от 30.04.2004 г.