Embed Size (px)
Citation preview

Кинематичка анализа и симулација робота
"Нордсон"
Аутор: Јован Радоњић
Факултет техничких наука Чачак
Студијски програм: Мехатроника; школска 2014/2015 Mентор рада: Др Новак Недић, ред. професор
1.УВОД
Роботика је примењена мултидисциплинарна грана техничких наука која
обједињује знања из различитих области теорије машина и механизама,електронике
,рачунарства,теорије аутоматског управљања, вештачке интелигенције и теорије
производње.
Данашњи развој аутоматике изискује све већу примену робота у
производњи.Данашњи роботи се користе у свим областима,почев од
производње,контроле,истраживање и др.
Индустријски манипулатори успешно се користе у производним
процесима.Могућност да се индустријским роботом манипулише објектом отвара
широку примену у процесима
-палетизације
-манипулације у складиштима комадне робе
-сортирање објеката
-паковање
Индустријски роботи у технолошким процесима могу обављати следеће операције:
-опслуживање машина
-електрично и тачкасто заваривање
-фарбање
-стругање,брушење,глодање
-лепљење,сечење
-монтажа и др.

Роботи су дефинисани као манипулатори који су састављени од редно повезаних
чланака спојених зглобовима са могућношћу хватања и премештања објеката имајући
неколико степени слободе кретања.
Робот се дефинише као вишефункционални манипулатор с могућношћу
репрограмирања,пројектован да преноси материјале,делове,алате и посебне направе кроз
различите програмиране покрете у циљу обављања одредјеног задатка.
Индустријски робот је дефинисан као манипулатор способан да обавља више
задатака уз могућност мењања програма и извршења истих.
Потреба за аутоматизацијом технолошких операција одговарајућег типа довела је
до стварања антропомеханичких система који су моделирани према удовима човека са
функцијама кретања.Такви системи се називају манипулаторима и индустријским
роботима.
Манипулатор је технички уредјај који аутоматски успоставља ф-ју руке човека у
току обављања помоћних и транспортних производних операција премештањем објекта у
простору.
Индустријски робот је манипулатор са променљивим програмом који преставља
аутоматску машину за обављање моторних и умних ф-ја при обављању помоћних и
основних технолошких операција.
Индусријски манипулатор мора да поседује следеће целине:
1)Механичку структуру која се састоји од низа чланака међусобно повезаних зглобовима.
2)Погони-електромотори,хидраулични и пнеуматски мотори за покретање чланака
3)Рачунар који омогућује управљање и надзор кретања манипулатора
4)Сензори детектују статус манипулатора и статус околине
Управљачки рачунар делује на погоне који покрећу механизам да би хватаљка
дошла у одређени положај.Мерењем положаја и брзине врха манипулатора преко
унутрашње повратне спреге добија се информација којом се може исправљати кретање.

Слика 1.1 Функционална блок шема индустријског манипулатора
Подела робота:
1. Прва генерација Чврсти програми,они су пасивни на било које унутрашње и
спољашње поремећаје.Прости програми са малом меморијом рачунара,просто
одржавање,поновљивост,ниска цена итд.
2. Друга генерација Адаптација на околности(поремећаје),поседују сензоре за
прилагодјавање.Ови роботи имају три до шест степени слободе и управљани су помоћу
сервосистема.Присутан је проблем тачности и поновљивости.
3. Трећа генерација Вештачка интелигенција,сами генеришу путање у зависности
информација са сензора,мењају програме у зависности од тренутних околности.
Механизми индустријских робота
То су механичке руке које су преко раменог зглоба спојене са подлогом
Механичка структура манипулатора састоји се од следећих елемената:
-механичке хватаљке
-шаке
-руке
-стуба
-постоља

Механичка структура индустријских манипулатора садржи позициони И
орјентациони део.Позициони део струцтуре састоје се од зглобова који могу бити
ротациони Р1,Р2,Р3 и транслаторни Т1,Т2,Т3.
Слика 1.2. Механичка структура индустријских манипулатора а) 1-хватаљка,2-
шака,3-рука,4-стуб,5-постоље;б)шематски приказ структуре за позиционирање;ц), д),
е),ф) ,г) различите концепције струцтуре за позиционирање.
Различитим комбинацијама ротационих и транслаторних зглобова механизама за
позиционирање одређене су следеће конфигурације манипулатора:
-правоугла ТТТ има три транслаторна зглоба чије су осе медјусобно паралелне.Радни
процтор им је призма
-цилиндрична РТТ Радни простор им је запремина измедју два цилиндра
-сферна РРТ Његов радни простор је запремина измедју две сфере
-ротациона РРР Радни простор је купа ако нема ограничења кретања радних зглобова.

-СКАРА РТР,ТРР, РРТ Код ових манипулатора све три осе су вертикалне.Ова
конфигурација се користи за радове монтаже и паковање по хоризонталној оси
Слика 1.3.Концепције механизама за позиционирање према класификацији
ИФР ТТТ-правоугли манипулатор,ТРТ-цилиндрични,ТРР-сцара,РРТ-сферни,РРР-
ротациони
Извршни елемент индустријског манипулатора је хватаљка којом се манипулише
објектима различитих маса, димензија, конфигурације и чврстоће.Користе се хватаљке у
облику клешта,пнеуматских сисаљки,вакумске,магнетне итд.Потпуна орјентација ручног
зглоба у тродимензионалном простору постиже се са три ротациона зглоба и то најчешће
сферни зглоб.
Хватаљке са два прста: непокретни 1.4 ц),покретни 1,4 д)-ј),кретати се
праволинијски 1.4, к)-л), или по луку 1.4 м) имати сложено просторно кретање 1.4 м).
Обично се користи хидраулични погони,односно електромотори.Погони се
директно спајају са прстима 1.4 ц) или преко преносника.Константна сила се постиже
зупчастим преносником 1.4 х)-м) или зглобно полужним механизмом 1.4 е),ф).

Слика 1.4.Концепције механизама хватаљке индустријских манипулатора
Степени слободе кретања
Број степени слободе механизама W је број независних координата који
једнозначно дефинишу просторни положај механизама.
Слика 1.5.Кинематички ланац механичке руке индустријског робота

Отворени кинематички ланац манипулатора састоји се од три основна подсистема
1)основа,2)механичка рука,3)шаке са хватаљком.
Број степени руке једнак је:
Wр=6н-6н_6-5п_5-4п_4-3п_3-2п_2-1п_1 где је н-број зглобова, п_н-класа зглобова.
Wо-Степен слободе постоља
Wп-Покретљивост шаке
W=Wр+Wо+Wп
У овом задатку се обрадјује робот „Нордсон“ у складу са темом (задатком рада).
2.РОБОТ НОРДСОН
Робот „Нордсон“ се састоји од манипулатора и управљачког система као и сваки
ро-бот.Манипулатор је механизам састављен од редно повезаних чланака преко
зглобова,са могућношћу хватања и премештања објеката.Број степени слободе се
одредјује посебно за сваки робот,а у складу са његовом наменом.
Управљачки систем обухвата програме,корекционе органе,изворе снаге,преносне
органе и мерне органе као и сензоре.На слици 1.1 је приказан робот „Нордсон“ са
координатним системима и параметрима робота као што су дужине сегмената итд.
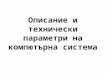
2.1. ПАРАМЕТРИ РОБОТА НОРДСОН
Таблица 2.1 Габарити основних делова робота „Нордсон“
Пречник .......980 /mm/
Тежина ........590 /kg/
Електронска
контрола
Извор
напајања
Манипулатор
Висина
1943 /mm/ 1983 /mm/ /
Ширина
559 /mm/ 711 /mm/ /
Тежина
159 /kg/ 625 /mm/ /
Снага
/ 6 /KW/ /
Дужина 838 /mm/ 1092 /mm/ /

Напон 460 /V/
/ /
Фреквенција
60 /Hz/ / /
Број фаза
3 / /
Пречник .......980 /mm/
Тежина ........590 /kg/
2.2 ПОГОНИ ЧЛАНАКА
У овом раду су усвојени праволинијски мотори на следећи начин:
1. Усвојени су углови ротације за сваки чланак (таблица 1.2)
2. Максималан терет износи mл=100 /kg/
Tablica 2.2
Radni opseg
uglova
Мин.вредност
углова
Makс.вредност
углова
2.3.КИНЕМАТИКА РОБОТА “НОРДСОН“
У вези са кинематиком робота постоје два проблема.Први проблем се назива
директна,а други инверзна кинематика.
Директна кинематика је проблем решавања позиције и орјентације хватаљке
познавајући координате хватаљке.Овај проблем има јединствено решење.
Инверзна кинематика је проблем решавања координата зглобова знајући положај и
орјентацију хватаљке.Нема јединствено решење.
Положај хватаљке се дефинише у односу на базни координатни систем,а преко
ортогоналних координатних система постављених у зглобовима манипулатора.

2.3.1.Директна кинематика робота „Нордсон“
За робот типа „Нордсон“ према задатку треба:
Координатни системи сагласно ДХ параметрима
ДХ параметри робота Нордсон су:
Таблица 2.3
Zgob d a
1 30 80 0 90
2 60 0 140 0
3 270 0 0 90
4 0 0 50 90
Слика 2.1. Покретни координатни системи зглобови робота Нордсон у односу на
базни
На слици 2.1 су постављени покретни координатни системи зглобови робота
Нордсон у односу на базни:
A(0,1)=transl(0.0,0.0,80)* rotz(pi/6)*transl(0,0,0)* rotx(pi/2)

A(0,1)=
A(1,2)= transl(0.0,0.0,0)* rotz(pi/3)*transl(140,0,0)* rotx(0)
A(1,2)=
A(2,3)= transl(0.0,0.0,0)* rotz((3*pi)/2)*transl(0,0,0)* rotx(pi/2)
A(2,3)=
A(3,4)=
A(3,4)=transl(0.0,0.0,0)* rotz(0)*transl(50,0,0)* rotx(pi/2)
A(3,4)=

A(0,4)=transl(0.0,0.0,80)*rotz(pi/6)*transl(0,0,0)*rotx(pi/2)*transl(0.0,0.0,0)*rotz(pi/3)*transl(
140,0,0)*rotx(0)*transl(0.0,0.0,0)*rotz((3*pi)/2)*transl(0,0,0)*rotx(pi/2)*transl(0.0,0.0,0)*
rotz(0)*transl(50,0,0)* rotx(pi/2)
A(0,4)=
2.3.2.Инверзна кинематика
Уколико смо задали закон промене спољашњих координата,можемо одредити
унутрашње кретање,за то задато спољашње кретање.
Да би се извршила синтеза управљања кретања робота,неопходно је унутрашње
кретање,односно решити инверзан проблем кинематике.
Стање механичког система у неком тренутку одредјено је познавањем
q (t) и q(t) ,јер се ове величине не могу променити, већ за неко ∆t.На основу овога
неопходно је познавање почетних услова за одредјивање даљег кретања система.Почетно
стање је одредјено вредностима q и q у тренутку t0 дакле q (t0) И q(t0)
Нумеричко задавање временских функција
Временске функције се задају преко низа тачака,односно низом њихових вредности
које одговарају низу тренутних вредности које одговарају низу тренутака времена.
Почиње се од чињенице да почетно стање (t0) и (t0) И временска промена (t)
једнозначно одредјују кретање ž (t)
Профил убрзања у спољашњим координатима задаје се на следећи начин:
Где су а,б,ц коефицијенти убрзања у правцима ,y,z у спољашњим координатама.

Ceo opisani postupak prikazan je na algoritmu i korišćen je u programu za simulaciju
ponašanja robota
Инверзна Јакобијанова матрица
Jakubijanova matrica

J( =
Koeфицијенти Јакобијанове матрице
J11=2*l2*sin(2* )*w1+l3*(cos( )*w1*sin( + )+sin( )*(w2+w3)*cos( + ))
J12=w1*l3*sin( )*cos( + )+l3*(w2+w3)*cos( )*sin( + )
J13=J12;
J21=w1*(l2*sin( )*sin( )+l3*sin( )*sin( + ))-l2*w2*cos( )*cos( )...
-l3*(w2+w3)*cos( )*cos( + );
J22=w1*(-l2*cos( )*cos( )-l3*cos( )*cos( + )+l2*w2*sin( )*sin( )...
+l3*(w2+w3)*sin( )*sin( + );
J23=-w1*l3*cos( )*cos( + )+l3*(w2+w3)*sin( )*sin( + )
J31=0;
J32=-w2*l2*cos( )-l3*(w2+w3)*cos( + )
J33=-l3*(w2+w3)*cos( + )
REŠENJE U MATLABU
>> dt=0.01;
>> q(:,1)=[0 0.52 3.66]';
>> qb(:,1)=[0.1 0.2 0.2]';
>> qu(:,1)=[0 0 0]';
>> teta1=q(1,1);

>> teta2=q(2,1);
>> teta3=q(3,1);
>> w1=qb(1,1);
>> w2=qb(2,1);
>> w3=qb(3,1);
>> a1=qu(1,1);
>> a2=qu(2,1);
>> a3=qu(3,1);
>> l1=0.70;
>> l2=1.45;
>> l3=1.20;
>> br=0.010;
>> a=br;
>> b=br;
>> c=br;
>> i=1;
>> t=0:dt:3;
>> i=i+1;
>> if t<0.5;
>> xuz=[a b c]';
>> elseif t>0.5 & t<2.5;
>> xuz=[0 0 0]';
>> else xuz=[-a -b -c]';
end
>> J11=-l2*cos(2*teta1)+l3*sin(teta1)*sin(teta2+teta3);

>> J12=-l3*cos(teta1)*cos(teta2+teta3);
>> J13=T12;
>> J21=-l2*cos(teta1)*sin(teta2)-l3*cos(teta1)*sin(teta2+teta3);
>> J22=-l2*sin(teta1)*cos(teta2)-l3*sin(teta1)*cos(teta2+teta3);
>> J23=-l3*sin(teta1)*cos(teta2+teta3);
>> J31=0;
>> J32=-l2*sin(teta2)-l3*sin(teta2+teta3);
>> J33=-l3*sin(teta2+teta3);
>> J=[J11 J12 J13;J21 J22 J23;J31 J32 J33]
J =
Коефицијенти инверзне Јакобијанове матрице
>>J11=2*l2*sin(2*teta1)*w1+l3*(cos(teta1)*w1*sin(teta2+teta3)+sin(teta1)*(w2+w3)*cos(tet
a2+teta3));
>>J12=w1*l3*sin(teta1)*cos(teta2+teta3)+l3*(w2+w3)*cos(teta1)*sin(teta2+teta3);
>>J13=J12;
>>J21=w1*(l2*sin(teta1)*sin(teta2)+l3*sin(teta1)*sin(teta2+teta3))-
l2*w2*cos(teta1)*cos(teta2)...
-l3*(w2+w3)*cos(teta1)*cos(teta2+teta3);
>>J22=w1*(-l2*cos(teta1)*cos(teta2)-
l3*cos(teta1)*cos(teta2+teta3))+l2*w2*sin(teta1)*sin(teta2)...
+l3*(w2+w3)*sin(teta1)*sin(teta2+teta3);
>>J23=-w1*l3*cos(teta1)*cos(teta2+teta3)+l3*(w2+w3)*sin(teta1)*sin(teta2+teta3);
>>J31=0;
>>J32=-w2*l2*cos(teta2)-l3*(w2+w3)*cos(teta2+teta3);
>>J33=-l3*(w2+w3)*cos(teta2+teta3);

>> JI=[J11 J12 J13;J21 J22 J23;J31 J32 J33]
JI =
>> q(:,i)=q(:,i-1)+qb(:,i-1)*dt+0.5*qu(:,i-1)*dt^2
q =
>> qu(:,i)=(J^1)*(xuz-JI*qb(:,i-1))
qu =
>> qb(:,i)=qb(:,i-1)+qu(:,i-1)*dt
qb =

ЛИТЕРАТУРА:
1.Вукобратовић М., Цветковић В., Кинематички и динамички прилаз синтези
кретања манипулационих робота, Београд 1996.
2.Ћућиловић М., Основе механичких манипулатора,Чачак 2010.
3.Поткоњак В., Роботика, Београд 1996.
4.Новак Недић., Скрипта Робот Нордсон ,Краљево 1987.
5.Вукобратовић М., Стокић Д., Кирћански Н., Увод у роботику, Београд 1986.
6.Програмски пакет ,Maтлаб R2009b
ЗАКЉУЧАК:
У овом раду је показан начин како се преко програмског пакета МатЛаб-а решава
директна и инверзна кинематика и динамика робота као и симулација.Познавајући
МатЛаб који се све чешће користи можемо на лакши начин решавати и сложеније
проблеме.МатЛаб скраћује време решавања.
Директном кинематиком су добијене координате хватаљке тако што су задате
координате сваког зглоба
Инверзном кинематиком су добијене координате зглобова тако што су задате
координате хватаљке.