Embed Size (px)
DESCRIPTION
יישום אלגוריתם בקרה אדפטיבית מסוג SAC לבקרת הינע של מערכת לינארית. מצגת הפרוייקט. מטרת הפרוייקט. - PowerPoint PPT Presentation
Citation preview

יישום אלגוריתם בקרה יישום אלגוריתם בקרה לבקרת לבקרת SACSACאדפטיבית מסוג אדפטיבית מסוג
הינע של מערכת לינארית הינע של מערכת לינארית
מצגת הפרוייקט
1

מטרת הפרוייקטמטרת הפרוייקטיישום בקר אדפטיבי מסוגSAC (Simple
Adaptive Controller) בהסתמך על מאמריהם-של ד"ר אילן רוסנק ופרופ' יצחק בר קנא, בפרט,
Improving Performances of Servo“המאמר Systems Using Adaptive Control” שעליו
נסמך הפרוייקט הנוכחי. המתווסף לגישת בקרה זו של שימוש בבקר
,יתרונות רבים: ( Add-On( למערכת הקיימת 1פשטות(2השגת תוצאות טובות בעלות נמוכה יחסית(3 שימוש במערכת קיימת המוכרת למשתמש -אין(
צורך לתכנן מחדש את המערכת 4 יתירות -במקרה תקלה מנתקים את הבקר(
וחוזרים להשתמש בקיים.2

שלבי הפרוייקטשלבי הפרוייקט
הכנת תשתיתSimulink נבנתה-סימולציה בדומה למאמר וקיבלנו
תוצאות המתאימות למובא למאמר. נבנתה סימולציה של מערכת המעבדה
והושוותה פונקצית התמסורת שקיבלנו לפונקצית התמסורת "המקורית" עפ"י
.(עבודתו של גיל קנשטי
3

שלבי הפרוייקט –המשך שלבי הפרוייקט –המשך
בשלב ראשון בדיקת במעבדהבוצעו מדידות– התגובה למדרגה,בפעם הראשונה ראינו איך
.PIDפועל בקר הסימולציהבשלב שני,חזרה על תוצאות
כלומר תגובת מערכת לאותה כניסה תוך שינויי .SACהגברים ,ללא/עם בקר
הוכחת תרומת בקר הSAC הקטנה –משמעותית באוסיליות והגדלת רובסטיות
מערכת קיימת לשינויי הגבר ע"י השל .SACהתוספת
4

שלבי הפרוייקט-המשךשלבי הפרוייקט-המשך
בוצעה סגירת חוג עם בקרP בסימולציה , ) . STEPלכניסת מדרגה (
תוכנן בקר אדפטיבי מסוגSAC ושולב בסימולציה-התקבלה תגובה משביעת רצון של
כאשר המערכת הקיימת לאותה הכניסה גם .-6Dbהגברי הבקר שונו ב
5

שלב א'-לימוד התשתיתשלב א'-לימוד התשתית
נלמדה התשתית המתמטית והתנאים המספיקים ליישום . Simple Adaptive Control (SAC)בקר
נלמדו והובהרו המושגיםStrictly Positive Real (SPR)Almost Strictly Positive Real(ASPR)ו- נלמדה חשיבות ודרך חישוב פונקציתD(s) שהינה
Parallel Feed forward Configuration (PFC). נלמד הקשר הנ"ל בדגש על מערכות מבוקרותPID.
6

בניית סימולציה על בסיס המאמר בניית סימולציה על בסיס המאמר
-נבנתה סימולציה בSIMULINK.עפ"י המאמר .שיחזור תוצאות המאמר
9
Exisiting Plant
1
s+1
Transfer Fcn M(S)
s+4
s +5s +6s3 2
Transfer Fcn G(s)
y_m
To Workspace1
y
To Workspace
Scope2
Scope1Scope
PulseGenerator
1/25
s+0.5
PFC-D(S)
1
Gain K2500
Gain K1
0
Constant
Addu_m e
y _m
y _m
e_a
e_ay

תגובת מערכת לכניסהתגובת מערכת לכניסה
תגובה אוסיצילטורית לכניסתhz0.8 שאיננה עונה לדרישות
10
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-1
-0.5
0
0.5
1
1.5
2
Time [Sec]
Y a
nd Y
M
Y(plant output)and YM
(model output) for 2.5 sec square wave input and M(s)=1/(1+0.1s)
y
ym

במערכת במערכתSACSACיישום בקר יישום בקר
תרומת הבקר-תגובת מערכת משביעת רצון.hz0.8לכניסת
110 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Time [Sec]
Y a
nd Y
M
Add On Adaptive Controller-Y(plant output) and YM
(model output)
y
ym

שלב ב'-בניית מודל הסימולציה של מערכת שלב ב'-בניית מודל הסימולציה של מערכת המעבדה המעבדה
) מודל הסימולציהSIMULINK של מערכת ( המעבדה מוצג להלן.
12

שלב ג' -השוואת פונקציות תמסורת שלב ג' -השוואת פונקציות תמסורת של מערכת המעבדה לעבודה קודמת של מערכת המעבדה לעבודה קודמת
של גיל של גיל פונקציות תמסורת זהות –מאמת נכונות מודל
הסימולציה
13
-120
-100
-80
-60
-40
-20
0From: pos to v conv. To: X pos
Mag
nitu
de (
dB)
10-1
100
101
102
-225
-180
-135
-90
Pha
se (
deg)
lab. System-Previous Work Viz.Simulink model Bode diagram Compersion
Frequency (rad/sec)

מודל הסימולציה של מערכת המעבדה מודל הסימולציה של מערכת המעבדה SACSACכולל בקר כולל בקר
14
Lab. SystemPrevious work
Add_0n Controller-Yellow
position
1
pos to v conv.
accelar,velocity
1
0.1s+1
Transfer Fcn TG
1/100
0.05s+1
Transfer Fcn PFC
Torque
K_e
To Workspace6
K_x
To Workspace5
K_u
To Workspace4
e_a
To Workspace3
e_model
To Workspace2
y_m
To Workspace1
Xpos
To Workspace
Scope3
Scope1Scope
PulseGenerator
Product 5
Product 4
Product 3
Product 2
Product 1
PID
PID Controller
1
L.s+R
Motor Model
u2
MathFunction 1
s+1e-3
Lx1
1
s+1e-6
Lx
1
s+1e-6
Lu
1K3
1K2
100
K1
1s
Integrator1
1s
Integrator
0
Gamax
0
Gamau
1e4
Gamalx
1e4
Gamalu
1e5
Gamale
1e3
Gamae
r
Gain4
Kemf
Gain3
Kfric
Gain2
1/Jeff
Gain1
Kt
Gain
0
GND INPUT1
0
GND INPUT
Enable SAC
Enable PFC
1
1=SAC ACTIVE
1
1=PFC ACTIVE
u_m
u_m
u_m
u_m V v oltI amp Tem
Tem
e
e alf a
omega
omega
Tf ric
X pos
X pos
X pos
y _m
y _m
y _m
y _m
e_modele_model
e_a
e_a
e_a
e_a
e_a
K_u
K_u
K_u
K_x
K_x
K_x
K_e
K_e
K_e
u

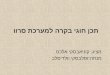
תגובת מערכת בסימולציה –ללא בקר תגובת מערכת בסימולציה –ללא בקר SACSAC לאותה הכניסה כאשר משנים את -לאותה הכניסה כאשר משנים את-
ההגברההגבר
15
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Time (sec)
Out
put
Pos
ition
lab. System Simulated Response to 0.2 Hz*1/(1+0.1S) While Gain (Kp) Changes
input
6db gain reducednormal gain

שגיאת עקיבה בסימולציה –ללא בקר שגיאת עקיבה בסימולציה –ללא בקר SACSAC לאותה הכניסה כאשר משנים את -לאותה הכניסה כאשר משנים את-
ההגברההגבר
16
0 1 2 3 4 5 6 7 8 9 10-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
Time (sec)
Tra
ckin
g E
rror
Lab. System - Simulated Tracking Error to 0.2Hz *1/(1+0.1S) While Gain (Kp) Varies
Normal Gain
6db Reduced Gain

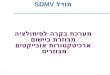
SACSAC--בשילוב בקר בשילוב בקר תגובת מערכת בסימולציה -תגובת מערכת בסימולציה -לאותה הכניסה כאשר משנים את ההגברלאותה הכניסה כאשר משנים את ההגבר
17
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Time (sec)
Out
put
Pos
ition
lab. System with SAC- Simulated Response to 0.2 Hz*1/(1+0.1S) While Gain (Kp) Changes
input
6db Reduced gainnormal gain

--בשילוב בקר בשילוב בקר שגיאת עקיבה בסימולציה -שגיאת עקיבה בסימולציה -SACSAC לאותה הכניסה כאשר משנים את לאותה הכניסה כאשר משנים את
ההגברההגבר
18
0 1 2 3 4 5 6 7 8 9 10-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
Time-sec
Tra
ckin
g E
rror
Lab. System (With SAC) - Simulated Tracking Error to 0.2Hz *1/(1+0.1S) While Gain (Kp) Varies
6db Reduced Gain
Normal Gain

בסימולציה – בסימולציה –--Augmented ErrorAugmented Errorשגיאת החוג שגיאת החוג -לאותה הכניסה כאשר משנים את -לאותה הכניסה כאשר משנים את SACSACעם בקר עם בקר
ההגברההגבר
19
0 1 2 3 4 5 6 7 8 9 10-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2Lab. System With SAC - Simulated Augmented Error for 0.2Hz *1/(1+0.1S) While Gain (Kp) Varies
Time-sec
Aug
men
ted
erro
r (e
a)
6db Reduced gain
normal gain

בסימולציה-כאשר משנים את בסימולציה-כאשר משנים את SACSACפרמטרי בקר הפרמטרי בקר הההגבר ההגבר
20
0 1 2 3 4 5 6 7 8 9 10-200
0
200
400
600
800
1000
1200
Time (sec)
Ku,K
x,Ke
SAC Parameters (Ku,K
x,K
e) for gain Changes
nominal Ku
nominal Kx
nominal Ke
reduced gain Ku
reduced gain Kx
reduced gain Ke

שלב ד' מדידות במעבדהשלב ד' מדידות במעבדה
מערכת המעבדה המורכבת ממסה על מסילהלהלן-להוסיף המונעת ע"י מנוע חשמלי מוצגת
:וידאו
21

תגובת מערכת מדודה לאותה הכניסה ללא תגובת מערכת מדודה לאותה הכניסה ללא .. תחת שינויי הגבר תחת שינויי הגברSACSACבקר בקר
תגובת מערכת משתנה ,עקיבה "גרועה",כאשר .2ההגבר מופחת פי
22
0 1 2 3 4 5 6 7 8 9 10-3
-2
-1
0
1
2
3original Plant with gain change
time[s]
Pos
ition
[cm
]
Nominal gain
inputGain Reduced by 6dB

שגיאת עקיבה מדודה לאותה הכניסה ללא שגיאת עקיבה מדודה לאותה הכניסה ללא תחת שינויי הגבר תחת שינויי הגברSACSACבקר בקר
מדידת שגיאת העקיבה של המערכת לכניסהקיימת
23
0 1 2 3 4 5 6 7 8 9 10-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5 Errors without SAC
time[s]
Err
or[c
m]
Tracking error for nominal gain
Tracking error for -6dB gain

תגובת מערכת מדודה לאותה הכניסה עם בקר תגובת מערכת מדודה לאותה הכניסה עם בקר SACSACתחת שינויי הגבר תחת שינויי הגבר
.תגובת המערכת איננה מושפעת כמעט משינויי ההגבר
24
0 1 2 3 4 5 6 7 8 9 10-3
-2
-1
0
1
2
3 Plant witch SAC,PFF and gain change
time[s]
posi
tion
[cm
]
Nominal gain
inputGain Reduced by 6dB

שגיאת עקיבה ושגיאת החוג מדודות לאותה שגיאת עקיבה ושגיאת החוג מדודות לאותה תחת שינויי הגבר תחת שינויי הגברSACSACהכניסה עם בקר הכניסה עם בקר
שגיאת העקיבה ושגיאת החוג לא מושפעותכמעט משינויי ההגבר.
25
0 1 2 3 4 5 6 7 8 9 10-1.5
-1
-0.5
0
0.5
1
1.5 Errors with SAC, PFF
time[s]
Err
or[c
m]
Tracking error for nominal gain
Tracking error for -6dB gainAugmented error for nominal gain
Augmented error for -6dB gain

מדודים -כאשר משנים את מדודים -כאשר משנים את SACSACפרמטרי בקר הפרמטרי בקר הההגבר ההגבר
יישום בקרSAC במערכת המעבדה –תחת שינויי הגבר.
26
0 1 2 3 4 5 6 7 8 9 10-200
0
200
400
600
800
1000 Ke, Ku and Kx for Nominal Gain and for gain reduced by -6dB
time[s]
Gai
n
Ke for Nominal gainKu for Nominal gain
Kx for Nominal gain
Ke for -6dB gain
Ku for -6dB gainKx for -6dB gain

סיכוםסיכום
במצגת זו הצגנו את עבודתנו לאורך כל שלביהפרוייקט,משלב הלימוד,בניית הסימולציות
והרצתן,מדידות במעבדה והשוואה לתוצאות הצפויות.
ראינו שמדידות המעבדה מראות התאמהמודל טובה מאוד למודל שנבנה בסימולציה.(
.) SACשאישש את יתרונות שילוב בקר תרומת בקר הSAC ניכרת באופן ברור
ברובסטיות המערכת לשינויי הגבר.
27