Embed Size (px)
Citation preview

ДО ЗМІСТУ ПІДРУЧНИКА ДОПОМОГА
Виберіть форму подання навчального матеріалу
Докладне подання Скорочене подання
До систем з одним ступнем вільності належать системи, в яких розташування мас в будь-який
момент часу однозначно визначається одним параметром, а їхній рух − зміною цього параметра за
часом.
15.1. Диференціальне рівняння руху
Розглянемо невагому балку, на якій розташована точкова маса m (рис.15.1,а). Поздовжніми
деформаціями балки будемо нехтувати. Така система має один ступінь динамічної вільності.
З м і с т г л а в и
15.1. Диференціальне рівняння руху
15.2. Вільні незатухаючі коливання
15.3. Вільні коливання при урахуванні сил опору
15.4. Змушені коливання в разі відсутності сил опору
15.4.1. Дія вібраційного навантаження
15.4.2. Динамічний коефіцієнт
15.4.3. Дія раптово прикладеної сили
15.5. Змушені гармонічні коливання при урахуванні сил опору
15.6. Програма моделювання процесів динаміки систем з одним ступнем вільності
Запитання для самоперевірки
15. Коливання систем з одним ступнем вільності

15.Коливання систем з одним ступнем вільності 2
Рис.15.1
Нехай на балку діє динамічне навантаження − нерухома зосереджена сила ( )tP , яка з часом
змінюється за величиною. Під дією цієї сили балка коливатиметься навколо положення рівноваги.
При цьому на балку діятимуть такі сили (рис.15.1,б):
• зовнішнє динамічне навантаження − сила )(tP ;
• сила інерції F my= − ɺɺ ;
• сила опору руху S, що спрямована в бік, протилежний переміщенню.
Зауважимо, що оскільки відхилення y маси вимірюється від положення рівноваги, власна вага
маси і пружна реакція балки в стані рівноваги взаємно зрівноважуються і тому в розрахунок не
беруться.
На підставі принципу суперпозиції повне переміщення маси m може бути записано як сума
прогинів від кожної сили окремо:
SFP yyyy −+= . (15.1)
Переміщення від кожної сили може бути виражено через прогин 11δ балки від дії одиничної
зосередженої сили 1=P (рис.15.1,в):
11
11 11
11
( );
;
.
P
F
S
y P t
y F my
y S
δδ δδ
== = −=
ɺɺ (15.2)
Тоді
( )11 11 11y P t my Sδ δ δ= − −ɺɺ ,
звідки
( )11 11 11 .my y S P tδ δ δ+ + =ɺɺ (15.3)
Розділивши рівняння (15.3) на 11mδ і позначивши

15.Коливання систем з одним ступнем вільності 3
2
11
1
m= ω
δ , (15.4)
дістанемо диференціальне рівняння руху системи з одним ступнем вільності:
2 ( )S P ty y
m m+ ω + =ɺɺ . (15.5)
15.2. Вільні незатухаючі коливання
Диференціальне рівняння руху для випадку вільних незатухаючих коливань дістанемо з
рівняння (15.5) як окремий випадок, якщо вважатимемо, що зовнішнє навантаження і сили опору
відсутні, тобто P(t)=0 i S=0. Отже, можемо записати:
2 0y y+ ω =ɺɺ . (15.6)
Загальний інтеграл однорідного диференціального рівняння руху (15.6), що характеризує вільні
коливання, має вигляд
1 2cosω sinω .y C t C t= + (15.7)
Швидкість і прискорення руху визначаються відповідно як перша і друга похідні за часом:
1 2ωsinω ωcosω ;v y C t C t= = − +ɺ (15.8)
,
2 21 2
2 2 2 21 2
cos sin
( cos sin )
a y C t C t
C t C t y
= = − ω ω − ω ω =
= −ω ω ω + ω ω = −ω
ɺɺ
(15.9)
звідки випливає, що прискорення прямо пропорційне переміщенню, але спрямоване в
протилежному напрямі.
Довільні константи інтегрування можуть бути виражені через умови на початку руху, тобто на
момент часу 0t = . Тоді з формул (15.7) і (15.8) маємо:
0 1
00 2 2
,
.
y C
vv C C
=
= ω ⇒ =ω
Підставляючи одержані величини у (15.7) можемо записати:
00 cos sin .
vy y t t= ω + ω
ω (15.10)

15.Коливання систем з одним ступнем вільності 4
Розв’язку диференціального рівняння (15.7) для зручності аналізу можна надати іншого
вигляду. З цією метою запишемо константи інтегрування 1C i 2C через дві інші константи:
1 sinC a= ϕ , 2 cos .C a= ϕ (15.11)
Ці нові константи a i ϕ також можна виразити через умови на початку руху:
1 1 0
2 2 0
sintg arctg ,
cos
C a C y
C a C v
ϕ ω= = ϕ ⇒ ϕ = =ϕ
22 2 2 2 2 01 2 0 sin cos .
vC C a a y + = ϕ + ϕ ⇒ = + ω
Підставивши вираз (15.11) у формулу (15.7), маємо:
sin cos cos sin ,y a t a t= ϕ ω + ϕ ω
звідси можемо остаточно записати:
. ( )siny a t= ω + ϕ . (15.12)
Із розв’язку (15.12) випливає, що вільні коливання без урахування сил опору відбуваються за
законом синуса і, отже, є простими гармонічними коливаннями. Графік залежності (15.12) побу-
довано на рис.15.2.
Рис.15.2
У точках екстремумів, коли ( )sin 1tω + ϕ = ± , функція прогинів y має амплітудні значення a.
Отже, константа a − це амплітуда коливань. Величина sina ϕ характеризує початкове
переміщення маси, а кут ϕ − початкову фазу коливань.
Оскільки синус є періодичною функцією з періодом 2π , можна записати:
( ) ( )sin sin 2y a t a t= ω + ϕ = ω + ϕ + π .

15.Коливання систем з одним ступнем вільності 5
Звідси випливає:
( )2sin sin .y a t a t T
π = ω + + ϕ = ω + + ϕ ω
Отже, період T виражається співвідношенням, с:
2
Tπ=
ω. (15.13)
Величина, c−1,
2
T
πω = (15.14)
характеризує кількість повних циклів коливань за 2π секунд і називається коловою або
циклічною частотою коливань. У техніці часто використовують величину, що показує кількість
повних циклів коливань за одну секунду і називається технічною частотою:
1
2f
T
ω= =π
. (15.15)
звідки
.1
f
T = (15.16)
Циклічна частота може бути знайдена із співвідношення (15.4):
11
1
mω =
δ. (15.17)
За другим законом Ньютона m Q g= , де Q − вага маси, 29,81g м сек= − прискорення
земного тяжіння. Тоді формула (15.17) може набрати вигляду:
11
g
Qω =
δ. (15.18)
Оскільки величина 11Qδ дорівнює переміщенню ст
y маси від статичного прикладання її ваги
Q , формулу (15.17) інколи записують інакше:
ст
g
yω = . (15.19)

15.Коливання систем з одним ступнем вільності 6
Приклад 15.1. Обчислити період і частоту вільних коливань системи, що зображена на
рис.15.3,а. Вага маси Q=1 кН, жорсткість на згин 4 210EI кНм= .
Рис.15.3
Система, що розглядається, має один ступінь вільності − маса m може переміщуватись у гори-
зонтальному напрямі.
На рис.15.3,б побудовано епюру згинальних моментів 1M від дії одиничної сили, яка при-
кладена до рами в місці розташування маси і спрямована горизонтально, тобто в напрямі її
можливого переміщення.
Переміщення обчислюємо за формулою Мора:
+⋅⋅⋅⋅⋅+⋅⋅⋅⋅⋅==∑∫ 23
222
2
111
3
211
2
11
0
1111 EIEI
dsEI
MMl
δ
3 41 1 2 4,53 1 3 4,5 10 /
2 2 3м м кН
EI EI−+ ⋅ ⋅ ⋅ ⋅ ⋅ = = ⋅ .
Колова частота вільних коливань
21
411
9,81 /147,6
1 4,5 10
g м сексек
Q кН м кНδ−
−ω = = =⋅ ⋅
.
Технічна частота
1147,6 23,5
2 6,28f с
−ω= = =π
.

15.Коливання систем з одним ступнем вільності 7
Період коливань
сf
T 210255,45,23
11 −⋅=== .
15.3. Вільні коливання при урахуванні сил опору
Рівняння руху вільних коливань з урахуванням сил опору дістанемо, поклавши в рівнянні
(15.5) величину динамічного навантаження 0)( =tP . Отже, маємо
2 0S
y ym
+ ω + =ɺɺ . (15.20)
Сила S характеризує опір коливанням, який може бути зумовлений внутрішнім тертям в
елементах системи, тертям у шарнірах, а також опором зовнішнього середовища. Інколи при
проектуванні споруд застосовуються спеціальні прилади (демпфери, гасники коливань), які
створюють штучний опір коливанням. При розрахунку будівельних конструкцій найбільший
вплив на процес коливань чинить внутрішнє тертя, яке вважається пропорціональним швидкості
руху мас, що переміщуються. Тобто вважатимемо, що
ykS ɺ= , (15.21)
де k − деякий коефіцієнт пропорційності.
Позначимо для зручності подальших викладок 2k
m= ε , де ε − коефіцієнт затухання коливань.
Тоді рівняння (15.20) можна переписати в остаточному вигляді:
22ε 0y y y+ + ω =ɺɺ ɺ . (15.22)
Для розв’язання цього диференціального рівняння запишемо характеристичне рівняння
2 22 0r r+ ε + ω = . (15.23)
Від значення дискримінанту 2 21ω = ε − ω , що входить до розв’язку характеристичного
рівняння
2 2r = −ε ± ε − ω ,
залежить остаточний вигляд розв’язку диференціального рівняння (15.22). Тобто розв’язок
залежить від співвідношення величин коефіцієнта затухання коливань ε і колової частоти ω.

15.Коливання систем з одним ступнем вільності 8
Якщо опір є незначним (ε<ω ), то характеристичне рівняння має комплексні корені. В цьому
випадку розв’язок диференціального рівняння (15.21) може бути записаний у вигляді
( )1 1 2 1cos sinty e C t C t−ε= ω + ω , (15.24)
де
2 21 .ω = ω − ε (15.25)
Константи інтегрування, як і в попередньому випадку, можуть бути виражені через початкові
умови коливань:
0 01 0 2
1
, v y
C y Cεεεε
ωωωω+= = ,
але для зручності аналізу константи виражають через амплітуду і початкову фазу коливань згідно з
константами (15.11). Це дає змогу записати розв’язок (15.24) в іншому вигляді:
( )1sinty ae t−ε= ω + ϕ . (15.26)
Співвідношення (15.26) є добутком двох функцій, одна з яких є періодичною, а друга прямує
до нуля із збільшенням часу t. Графік, який відповідає цьому співвідношенню, зображено на
рис.15.4.
Рис.15.4
Отже, система, що виведена зі стану рівноваги, при урахуванні сил опору здійснює вільні
коливання з частотою 2 21 .ω = ω − ε , причому амплітуди з плином часу зменшуються. Такі
коливання називаються затухаючими. Легко пересвідчитись, що період коливань при урахуванні
сил опору
1 2 21
2 2 T
π π= =ω ω − ε
(15.27)

15.Коливання систем з одним ступнем вільності 9
більший, ніж період незатухаючих коливань (15.13).
Розглянемо співвідношення двох будь-яких сусідніх амплітуд:
( )1
11
ti T
t Ti
a aee
a ae
−εε
−ε ++= = . (15.28)
Звідси випливає, що відношення будь–яких сусідніх амплітуд є константою, тобто величини
амплітуд зменшуються за законом геометричної прогресії. В практичних розрахунках розглядають
натуральний логарифм цього співвідношення, який називається логарифмічним декрементом,
11
i
i
aln T
a +γ = = ε . (15.29)
Якщо опір є великим (ε>ω ), то розв’язок диференціального рівняння (15.22) може бути
представлений у вигляді
( )1shty ae t−ε= ω + ϕ . (15.30)
Рух, що описується рівнянням (15.30), не буде коливальним. Система, яка виведена зі стану
рівноваги, повертається до вихідного положення (рис.15.5). Такий рух називається аперіодичним.
Рис.15.5
У разі, якщо ε = ω (так зване критичне затухання), розв’язок диференціального рівняння
руху (15.22) набуває вигляду:
( )1 2ty e C C t .−ε= + (15.31)
Такий рух також є аперіодичним.
15.4. Змушені коливання в разі відсутності сил опору
Якщо на систему в разі відсутності сил опору діє динамічне навантаження ( )P t , то маємо
неоднорідне диференціальне рівняння руху:

15.Коливання систем з одним ступнем вільності 10
( )2 P ty y .
m+ ω =ɺɺ (15.32)
Розв’язок неоднорідного рівняння є сумою загального розв’язку 0y відповідного однорідного
рівняння (15.6) і частинного розв’язку y∗ , вигляд якого залежить від вигляду правої частини
рівняння:
0y y y∗= + . (15.33)
Величина 0y у розв’язку (15.33) характеризує вільні, а y∗ − змушені коливання. Розв’язок
однорідного рівняння було одержано в п.15.2:
( )0 siny a t= ω + ϕ . (15.34)
15.4.1. Дія вібраційного навантаження
Вібраційне навантаження являє собою узагальнену силу, яка змінюється за гармонічним
законом
0 sinθP( t ) P t= , (15.35)
де 0P − амплітудна величина динамічного навантаження, θ − колова (циклічна) частота зміни
навантаження, яка звичайно пов’язується з кількістю n обертів двигуна за хвилину:
30
nπθ = . (15.36)
У разі дії вібраційного навантаження (15.35) диференціальне рівняння (15.32) перепишеться в
такий спосіб:
2 0 sinP
y y tm
+ ω = θɺɺ (15.37)
Шукатимемо частинний розв’язок у вигляді:
1 2sinθ cosθy C t C t∗ = + . (15.38)
Друга похідна частинного розв’язку набере вигляду:
2 21 2sin cosy C t C t∗ = − θ θ − θ θɺɺ . (15.39)
Підставимо вирази (15.38) і (15.39) у рівняння (15.37) і виконаємо зведення подібних членів:

15.Коливання систем з одним ступнем вільності 11
( ) ( )2 2 2 2 01 2sin cos sin
PC t C t t
mω − θ θ + ω − θ θ = θ .
Порівнявши коефіцієнти при sin tθ і cos tθ у лівій і правій частинах рівності, дістанемо два
рівняння, звідки знайдемо значення констант інтегрування:
( )( ) ( )
2 22 2
2 2 0 01 1 2 2
0 0
C C ;
P PC C .
m m
ω − θ = ⇒ =
ω − θ = ⇒ =ω − θ
(15.40)
З урахуванням (15.40) маємо з (15.38) такий частинний розв’язок:
( )0
2 2sin
Py t
m∗ = θ
ω − θ (15.41)
Графік змушених коливань, відповідних рівнянню (15.41), наведено на рис.15.6.
Рис.15.6
Отже змушені переміщення маси в разі відсутності сил опору відбуваються з частотою вібра-
ційного навантаження і з амплітудою, яка визначається за формулою
( )0
2 2
PA
m=
ω − θ. (15.42)
15.4.2. Динамічний коефіцієнт
Перетворимо вираз (15.42):
02 2 2
1
1
PA
m= ⋅
ω − θ ω. (15.43)
Звернемо увагу на те, що

15.Коливання систем з одним ступнем вільності 12
00 112
PP
m= δ
ω (15.44)
дорівнює переміщенню cтy від дії статично прикладеної сили 0P .
Отже, можна записати:
ст
A y= µ . (15.45)
Безрозмірний коефіцієнт
2 2
1
1µ =
− θ ω, (15.46)
який показує в скільки разів амплітуда прогину при динамічному прикладенні навантаження
перевищує прогин при статичному прикладенні, називається динамічним коефіцієнтом.
Залежності, аналогічні (15.45), можуть бути записані і для будь-яких статичних і кінематичних
факторів: опорних реакцій, згинальних моментів, поздовжніх і поперечних сил, деформацій,
напружень тощо. Тобто у загальному вигляді
дин ст
S S= µ , (15.47)
де дин ст
S ,S − величини фактора S відповідно при динамічному і статичному навантаженні.
Таким чином, в системі з одним ступнем вільності для визначення зусиль або переміщень від
динамічного навантаження достатньо обчислити відповідні величини при статичному прикладанні
навантаження і помножити результати на динамічний коефіцієнт.
Величина динамічного коефіцієнта µ повністю визначає напружено-деформований стан
динамічної системи і залежить від співвідношення частот змушених і вільних коливань. На
рис.15.7,а побудовано графік залежності динамічного коефіцієнта за абсолютним значенням.
Коли θ /ω наближається до одиниці, коефіцієнт µ швидко зростає, а коли вільна і змушена
частоти коливань збігаються ( 1θ ω = ), обертається на нескінченність. Таке явище називається
резонансом. Коли настає резонанс, усі параметри, що характеризують напружено-деформований
стан системи (переміщення, напруження тощо), набувають нескінченно великих значень. Це
призводить до руйнування конструкції. Втім розвиток нескінченно великих параметрів чиниться
не миттєво, а впродовж певного відрізка часу (рис.15.7,б).

15.Коливання систем з одним ступнем вільності 13
Рис.15.7
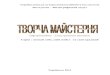
Приклад 15.2. Побудувати епюру згинальних моментів у рамі (рис.15.8,а), що знаходиться під
дією горизонтальної динамічної сили 0 sinP P t= θ , 0P =4 кН, θ =125,6 сек-1. Вага маси
Q=1 кН, EI=104 кНм
2.
Рис.15.8
З розрахунку рами на вільні коливання (див.приклад 15.1) маємо колову частоту ω=147,6 сек-1.
За формулою (15.46) обчислимо динамічний коефіцієнт:
2 2
13 625
1 125 6 147 6, .
, ,µ = =
−
Епюра згинальних моментів ст
M від статичного прикладення амплітудного значення сили
0P = 4 кН побудована на рис. 15.8,б. Епюра згинальних моментів від динамічної сили побудована
на рис.15.8,в у відповідності з формулою (15.47):
3 625дин ст ст
M M , Mµ= = .

15.Коливання систем з одним ступнем вільності 14
15.4.3. Дія раптово прикладеної сили
Нехай сила P раптово прикладається до системи і залишається надалі незмінною, тобто
( )P t P= . Тоді рівняння руху (15.32) набере вигляду:
2 Py y
m+ ω =ɺɺ . (15.48)
Загальний розв’язок шукатимемо у формі
1 2 2cos sin
Py C t C t
m= ω + ω +
ω. (15.49)
Два перших доданки характеризують вільні, а третій − змушені коливання. Тобто цей третій
доданок становить частинний розв’язок задачі. Константи інтегрування 1C i 2C можуть бути
визначені на підставі початкових умов руху: в момент часу 0t = переміщення маси і швидкість її
руху дорівнюють нулю, тобто 0 0y = i 0 0 0v y= =ɺ . На основі рівняння (15.49) ці умови
запишуться в такий спосіб:
2 20 1 10 y C P m C P m ,= + ω = ⇒ = − ω
0 2 20 C 0y C .= ω = ⇒ =ɺ
Беручи до уваги позначення (15.4) можемо записати як
1 11 ст
C P y= δ = , (15.50)
де yст − переміщення маси від статичного прикладання сили P.
Підставивши знайдені величини констант у рівняння (15.49) одержимо:
( )1 cosст
y y t= − ω . (15.51)
У графічній формі цей розв’язок представлено на рис.15.9. Отже, маса коливається навколо
статичного положення рівноваги yст з амплітудою ст
A y= . Максимальне відхилення становить
ymax = 2yст, а динамічний коефіцієнт 2max стy yµ = = .

15.Коливання систем з одним ступнем вільності 15
Рис.15.9
15.5. Змушені гармонічні коливання при урахуванні сил опору
Розглянемо дію на систему гармонічної сили 0sinP P t= θ . У даному випадку диференціальне
рівняння руху (15.5) з урахуванням позначення 2k
m= ε і співвідношення (15.22) перепишеться у
вигляді
2 02 sinP
y y y tm
+ ε + ω = θɺɺ ɺ . (15.52)
Як завжди, розв’язок неоднорідного диференціального рівняння (15.52) складається із
загального розв’язку однорідного диференціального рівняння 0y і частинного розв’язку y∗ , який
характеризує змушені коливання:
0y y y∗= + . (15.53)
Отже, переміщення маси є накладанням двох коливальних процесів, один із яких описується
розв’язком задачі про вільні коливання (15.26):
( )0 1sinty ae t−ε= ω + ϕ , (15.54)
а другий, що характеризує змушені коливання, будемо розшукувати у формі:
1 2sin cosy C t C t∗ = θ + θ . (15.55)
Запишемо першу і другу похідні частинного розв’язку (15.55):

15.Коливання систем з одним ступнем вільності 16
1 2
2 21 2
cos sin
sin cos
y C t C t;
y C t C t.
∗
∗
= θ θ − θ θ
= − θ θ − θ θ
ɺ
ɺɺ
(15.56)
Підставимо вирази (15.55) і (15.56) у рівняння (15.52):
( ) ( ) 2 21 2 1 2sin cos 2 cos sinC t C t C t C t− θ θ − θ θ + ε θ θ − θ θ +
( )2 01 2sin cos sin
PC t C t t.
m+ω θ + θ = θ (15.57)
Розкриємо дужки і проведемо зведення подібних членів:
( ) ( )2 2 2 21 2 1 22 sin 2 cosC C t C C t ω − θ − εθ θ + εθ + ω − θ θ =
0 sin
Pt.
mθ
Прирівняємо члени при синусах і косинусах у лівій і правій частинах рівності:
( )( )
2 2 01 2
2 21 2
2
2 0
PC C ,
m
C C .
ω − θ − εθ =
εθ + ω − θ = (15.58)
Розв’язавши систему рівнянь (15.58), дістанемо величини довільних констант:
2 20 0
1 22 2
2
P PC , C .
m m
ω − θ εθ= ⋅ = − ⋅ψ ψ
(15.59)
Тут позначено:
( )22 2 2 2 24ψ = ω − θ + ε θ . (15.60)
Введемо такі позначення:
2 2 2cos sin =,
ω − θ εθρ = ρψ ψ
, (15.61)
і зрештою одержимо
2 2
2tgarc
εθρ =ω − θ
. (15.62)

15.Коливання систем з одним ступнем вільності 17
Справді, можна впевнитись, що, по-перше, величини (15.61) є меншими за одиницю і, по-
друге, виконується таке співвідношення:
( ) ( )22 2 22 2
2
2sin cos 1.
εθ + ω − θρ + ρ = =
ψ
Отже, довільні константи інтегрування з урахуванням позначень (15.61) набудуть вигляду
0 01 2 cos sin
P PC , C ,
m m= ρ = ρ
ψ ψ (15.63)
Зрештою маємо розв’язок рівняння (15.55) у формі
( )0 sin cos cos sinP
y t tm∗ = θ ρ − θ ρ
ψ, (15.64)
або остаточно:
( )0 sinP
y tm∗ = θ − ρ
ψ. (15.65)
Із рівняння (15.65) можна дійти висновку: змушені коливання при дії вібраційного
навантаження є періодичними, відбуваються з такою ж частотою, що й навантаження, і мають
амплітуду
0 P
Am
=ψ
. (15.66)
На рис.15.10 зображено складові коливального процесу. По-перше, це графік вільних коливань
з урахуванням опору (15.54). Йдеться про вільні коливання (рис.15.10,а), які досить швидко
затухають.

15.Коливання систем з одним ступнем вільності 18
Рис.15.10
По-друге, це графік змушених коливань, що описуються рівнянням (15.65). І, по-третє, це
графік сумарного руху (рис.15.10,в), який є сумою двох попередніх графіків. На останньому
графіку можна виділити дві зони:
1. Зона, де вплив вільних коливань є відчутним. Це так звані неусталені, або нестаціонарні,
коливання.
2. Зона, де вільні коливання повністю або майже повністю затухли. Це суто змушені коливання,
які називають усталеними, або стаціонарними, коливаннями.
Розглянемо докладніше амплітуду змушених коливань (15.66). З урахуванням позначення
(15.60) можемо записати:
( )0
22 2 2 2
1
4
PA
m= ⋅
ω − θ + ε θ.
Якщо винести частоту вільних коливань ω з-під знака радикала, то матимемо
( )0
2 2 2 2 2 2 4
1
1 4
PA
m= ⋅
ω − θ ω + ε θ ω . (15.67)

15.Коливання систем з одним ступнем вільності 19
Звернемо увагу на те, що перший співмножник становить переміщення від статичної дії
навантаження:
00 112 ст
PP y
m= δ =
ω
і позначимо:
( ) 2 2 2 2 2 4
1
1 4
µ =− θ ω + ε θ ω
. (15.69)
Тоді амплітуду переміщень змушених коливань (15.67) можна представити у формі:
ст
A y= µ . (15.70)
Отже, µ − це динамічний коефіцієнт для вібраційного навантаження при урахуванні сил опору.
Для переважної більшості будівельних конструкцій можна вважати що ε << ω . В такому разі з
урахуванням позначень (15.27) і (15.29) динамічному коефіцієнту (15.69) можна надати вигляду
( ) ( ) ( )2 2 2 2 2
1 =
1
µ− θ ω + γ π θ ω
. (15.71)
На рис.15.11 зображено графіки залежності динамічного коефіцієнту µ від співвідношення
частот θ ω при різних значеннях логарифмічного декремента γ.
Із графіка видно, що урахування сил опору ( )0γ > зменшує значення динамічного
коефіцієнта. В межах, коли θ ω 0 7,≤ або θ ω 1 3,≥ врахування сил опору мало впливає на
динамічний коефіцієнт. У разі, коли частоти вільних і змушених коливань збігаються, тобто у
випадку резонансу, при наявності сил опору динамічний коефіцієнт має скінченне значення.
Справді, із формули (15.71) випливає, що в разі, коли θ = ω , динамічний коефіцієнт
πµ =γ
. (15.72)

15.Коливання систем з одним ступнем вільності 20
Рис.15.11
15.6. Програма моделювання процесів динаміки систем з одним ступнем вільності
До складу програмного забезпечення підручника входить розроблена доцентом Ю.І.Фіалко
програма, призначена для моделювання динамічних процесів у системах з одним ступнем
вільності. Програма має три режими роботи:
1) демонстрацію;
2) навчання;
3) контроль.
Режим демонстрації дає змогу вивести на екран графіки таких процесів: вільні коливання без
затухання, вільні затухаючі аперіодичні і періодичні коливання, змушені коливання з урахуванням
і без урахування сил опору, а також коливання у випадку резонансу.
У режимі “навчання” є можливість одержувати графіки коливальних процесів при будь-яких
параметрах руху, які задаються безпосередньо під час роботи програми.
Для самоперевірки вміння виконувати динамічні розрахунки програма має базу індивідуальних
завдань, яка викликається в режимі “контроль”. Програма порівнює результати власного роз-
рахунку із результатами, які виконані “вручну” і повідомляє щодо їх правильності.
















![Гении и Аутсайдеры. Почему Одним Все, а Другим Ничего 2013[Read]](https://img.pdfslide.tips/doc/110x75/577cc68a1a28aba7119e8a72/-577cc68a1a28aba7119e8a72.jpg)










