Embed Size (px)
Citation preview

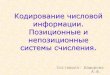
Лекция 2. Позиционныеметоды
Позиционный метод основан на определенииместоположения объекта путем засечек, представляющих собой точку пересечения двух илиболее линий (поверхностей) положения, относительноизвестных ориентиров
1 R
2RA
Б
С
Д
.
..
.
X
Y
O
2 2
1 ( ) ( )А С Д А С ДR x x y y
2 2
2 ( ) ( )Б С Д Б С ДR x x y y
Координаты точек А и Бизвестны (радиомаяки).
Измеряются дальности R1 и R2
Объект находится в точке Сили Д

Типы позиционныхметодов
• Дальномерный метод
• Разностно-дальномерный метод
• Суммарно-дальномерный метод
• Угломерный метод
• Дальномерно-угломерный метод
• Псевдодальномерный метод
• Радиально-скоростной метод
• Разностно-радиально-скоростной метод
• Псевдорадиально-скоростной метод

Дальномерный методДальномерный метод позволяет определитьпространственные координаты объекта путём измерениядальностей R1, R2, R3 до трёх точек с известнымикоординатами: 1 1 1, ,x y z 2 2 2, ,x y z 3 3 3, ,x y z
To o o - неизвестные координаты объекта, находятся из решения
системы уравнений:
x y zx
2 2 21 1 o 1 o 1 o
2 2 22 2 o 2 o 2 o
2 2 23 3 o 3 o 3 o
R x x y y z z
R x x y y z z
R x x y y z z
Итерационный метод решения:
T
0
1T T
1 1
, 0 0 0 ,
k k k
R f x x
f x f x f xx x R f x
x x x

Разностно - дальномерный методРазностно-дальномерный метод основан наиспользовании разностей расстояний объекта до парточек с известными координатами. На входе: разностидальностей, на выходе: координаты объекта.
1R
2R
2 1 constR R
3 4 constR R
3R
4R
b
Линии положения –гиперболы. Объектнаходится в точкепересечения линийположения
* Разностно-дальномерный методприменяют когда дальности до маяковнайти нельзя, но можно найти разностидальностей

Угломерный методУгломерный метод основан на использовании в качествеНП угловых направлений (пеленгов) на точки сизвестными координатами. На входе: пеленги, навыходе: координаты объекта.
Линии положения в плоскости –лучи, в пространстве – конусы.
1
2
1
2
1
1
1 2
2 1
1 2
2 1
1 2
, - опорные точки (напр. радиомаяки)
расстояние между опорными точками
cos ' sin '
sin ' '
cos ' cos '
sin ' '
C O
C O
O O
L
Lx x
Ly y

Дальномерно-угломерный метод
Дальномерно-угломерный метод основан наиспользовании следующих НП:
- дальности до опорной точки
- углов пеленга на опорную точку
Пример на плоскости:
1 1
1
1
1 - опорная точка (напр. радиомаяк)
, известные координаты опорной точки
, - НП, полученные в результате измерений
sin
cos
O O
C O
C O
O
x y
R
x x R
y y R
R

Радиально-скоростной методВ качестве НП используются радиальные скоростиотносительно опорных точек, полученные на основеизмерений доплеровского смещения частоты. Навыходе формируется оценка вектора скорости объекта.
Координаты опорных точек икоординаты объекта считаютсяизвестными. Вектор скоростиопределяется в результате решениясистемы уравнений:
O1
.V
.O3
O2
.
3Rv 90
C
90
1Rv
2Rv
.
1 2
1 2
1 2
3
3
3
T T
T
,C O C O
R R
C O C O
C O
R
C O
v v
v
x x x xV V
x x x x
x xV
x x

Разностно-радиально-скоростной метод
На входе:
1. Находят тангенциальные скорости:
1 2 3 4
1 2 1 2
радиальная скорость относительно точки
, разности радиальных скоростей
относительно опорных точек, которые эквивалентны
угловым скоростям и относительно баз и
R
R R R R
v R D
v v v v
b b
VvR
1vR2
vR
1 2v vR R
2b
1
тvò1 1 ò2 2, , ãäå C Dv R v R R CD x x
2. Находят направляющие векторыбазовых линий:
3 41 2
1 2
1 2 3 4
, , ,O OO OC D
DC b bC D O O O O
x xx xx xr r r
x x x x x x
3. Находят вектор скорости объекта:
1 2ò1 ò2R DC b bv v v V r r r

Дано:
1. Вектор измерений дальностей (N измерений):
2. Координаты N опорных точек (радиомаяков, навигационныхспутников), записанные в векторном виде:
Найти: вектор координат объекта
Практическое определение координатобъекта дальномерным методом
T
1 2 , *- измерениеNR R RR
На практике количество измерений дальности обычно больше трёх. Чтобы повысить точность координатных определений, для решениясистемы уравнений применяют метод наименьших квадратов (МНК).
П О С Т А Н О В К А Н А В И Г А Ц И О Н Н О Й З А Д А Ч И
To o ox y zx
TT T1 1 1 1 2 2 2 2, , N N N Nx y z x y z x y z x x x

Решение навигационной задачи
2 2 2
o o o
1
2
,
где * - квадратичная норма, отсюда
i i i i i
N
R x x y y z z
x x
x x
x xR f x
x x
1. Запишем функциональную связь между измеряемойдальностью и координатами объекта
min R f x
2. Применим МНК, который минимизирует квадратичнуюнорму вектора невязок:
Вектор невязок

Решение навигационной задачи
o o
2 2 2o
o o o
T
1
1
T
2
2
T
, отсюда
градиентная матрица размером 3
i ii
ii i i
N
N
x x x xR
x x x y y z z
N
x x
x x
x x
x xf x
H x x xx
x x
x x
3. Для применения МНК найдем производную функцииf(x), связывающей вектор измерений с векторомсостояния, по вектору состояния x. Эта производнаяназывается градиентной матрицей:

Решение навигационной задачи
T
0
1T T
1 1 1 1 1
0 0 0 - начальное приближение,
- номер итерации
k k k k k k
k
x
x x H x H x H x R f x
4. Находим вектор состояния x, пользуясь итеративнымалгоритмом, суть которого и есть МНК:
Критерий останова:
1
- требуемая точность
k k
x x

Сходимость МНК

Геометрический факторНе при любой геометрии взаимного расположениярадиомаяков и объекта решение навигационной задачивозможно
1R2R
3R
1R2R
3R

Геометрический фактор
X RPDOP
Не определение: пространственный геометрическийфактор (PDOP) – это коэффициент ухудшения точностиопределения пространственных координат по сравнениюс точностью измерений дальности.
PDOP – “Positioning Dilution of Precision”
Геометрический фактор можно найти по градиентнойматрице H из алгоритма МНК:
1Ttrace
(trace * след матрицы)
PDOP
H H