Embed Size (px)
Citation preview

Boletín TecSimAño 4, Número 1 Por: Adolfo Jimmy Saldivias Febrero 2003
ÍndiceControl en turbinas Pelton........................................................ 2Abreviaturas .............................................................................. 2Estructura de un Programa de Control................................... 3Sección Lógica............................................................................ 3Sección Posicionamiento ........................................................... 7Sección Limitador de Apertura .............................................. 10Sección Selección De Agujas ................................................... 11Sección Controlador De Velocidad ........................................ 13Sección Controlador De Potencia........................................... 16Sección Controlador De Caudal ............................................. 19
Y ahora que me vigilan la vibración, elnivel de aceite, la velocidad, la potencia,¡que otra me queda que portarme bien!.

“Uno no descubre nuevas tierras sin aceptar perder de vista la orilla durante mucho tiempo”Andre Gide
Santa Cruz, Av San Martin 1290, [email protected], tel. 342-2099, 345-2465Cochabamba, Venezuela E-0866, [email protected], fax 452-3413, tel 452-3438
2
2
Control en turbinas PeltonLa configuración estándar de los controladores digitales de turbinas(“Turbine controller” TC) se basa en el conocimiento actual deregulación y control para turbinas Pelton de chorro múltiple.
En los mejores casos, la estructura del controlador esta diseñada deforma tal que las funciones principales (control por velocidad,caudal, potencia) se manejan como partes de programas separadas.
En la etapa del proyecto las partes pueden ser adaptadas a losrequerimientos específicos de cada Planta.
Jimmy Saldivias es Ingeniero Electrónico y Magíster en Administración de Empresas.
Para explicar el funcionamiento de los controladores de turbinas Pelton, la forma mas sencilla de ilustración es eluso de los diagramas de flujo, con bloques que encierran una cierta funcionalidad. En las páginas siguientes,utilizaremos esta metodología. Cada uno de los bloques tendrá un nombre abreviado que indica la funcionalidad queencierra. En otras palabras haremos uso de abreviaturas.
Al comienzo del Boletín, debo agradecer al personal de VATECH, fabricante de controladores de turbinas por suapoyo así como al personal de COBEE, la generadora de energía eléctrica para la ciudad de La Paz, por sucolaboración, en especial al Ing. José Luis Daza.
AbreviaturasPara que las abreviaturas a ser utilizadas tengan algún sentido más allá del Boletín, esmenester hacer uso de abreviaturas que si bien no constituyen un “estándar” si reflejantérminos que se usan con mucha frecuencia en este ambiente de trabajo.
En otras palabras, para que usted tenga una herramienta útil de trabajo, tan útil como puedeser una pinza, y para hacerle la vida más fácil, se ha creado abreviaturas para términos muyusados en los manuales.
Abreviatura Significado Origen de la abreviatura(Del ingles)
FCA Calculo del Caudal Flow Calculation
FFD Estatismo Frecuencia Caudal Frequency Flow Droop
FLC Controlador de Caudal Flow Controller
FPD Estatismo Frecuencia Potencia Flow Power Droop
FSP Set point de Caudal Flow Set point
LEC Controlador de Nivel Level Controller
LOG Lógica Logic
LSP Set point de Nivel Level Set point
NDS Descarga de Aguja Needle Discharge
NSL Selección de Aguja Needle Selection
OCC Control de Leva Fuera Out Cam Control
OPL Limitador de Apertura Opening Limiter

“Uno no descubre nuevas tierras sin aceptar perder de vista la orilla durante mucho tiempo”Andre Gide
Santa Cruz, Av San Martin 1290, [email protected], tel. 342-2099, 345-2465Cochabamba, Venezuela E-0866, [email protected], fax 452-3413, tel 452-3438
3
3
POC Controlador de Potencia Power Controller
POS Posicionamiento Positioning
PSP Set Point de Potencia Power Set Point
SPC Controlador de Velocidad Speed Controller
SSP Set point de Velocidad Speed Set Point
Estructura de un Programa de Control
Fig. 1: Turbinas Pelton en la planta Cahua de COBEE, Valle de Zongo, La Paz
Un controlador de turbinas Pelton, cuenta con varias “secciones”. Cada sección o “modulo”, constituye una parte dela programación de control. Este “modulo” a su vez, estará constituida por varios Bloques de Funciones.
Sección LógicaLa sección lógica de un controlador de turbina Pelton, es la encargada de realizar actividades o de manejarpreguntas, cuya respuesta es de tipo SI o NO.
Ejemplo de estas preguntas: selección del modo de operación, detección de red aislada, arranque y paro, ejecutar unaparada rápida, verificar si hay sobre velocidad, seleccionar agujas.
“Uno no descubre nuevas tierras sin aceptar perder de vista la orilla durante mucho tiempo”Andre Gide
Santa Cruz, Av San Martin 1290, [email protected], tel. 342-2099, 345-2465Cochabamba, Venezuela E-0866, [email protected], fax 452-3413, tel 452-3438
4
4
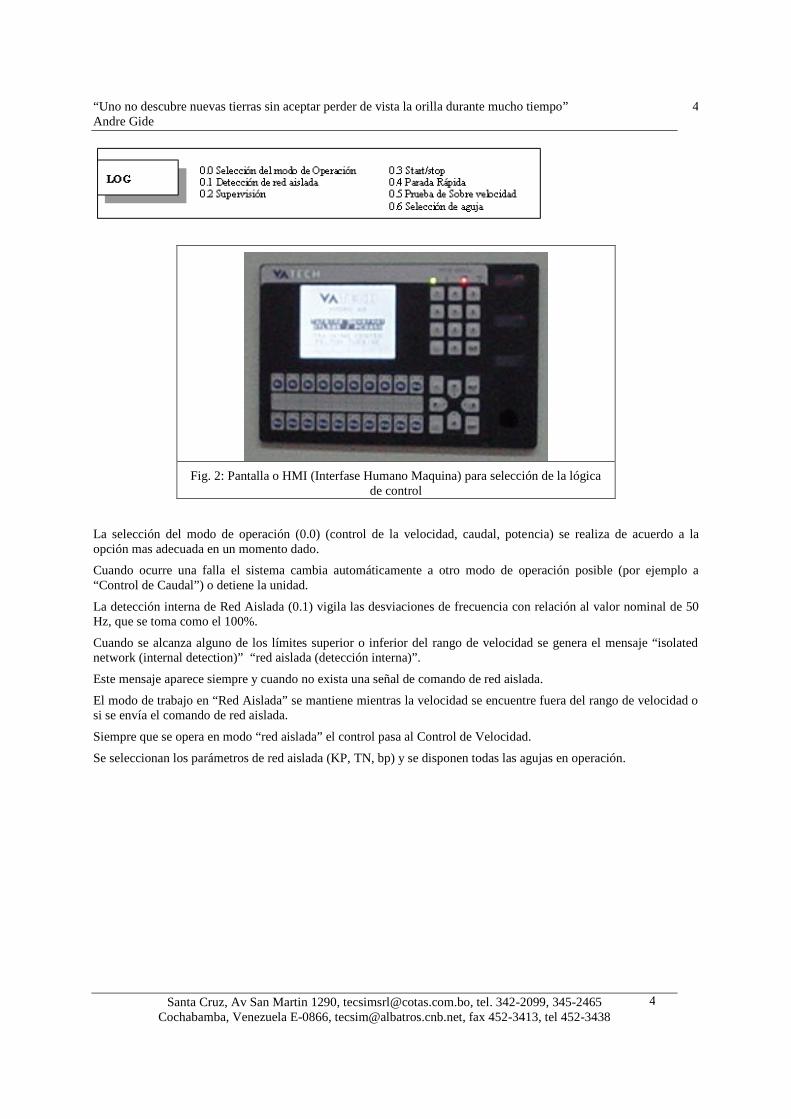
Fig. 2: Pantalla o HMI (Interfase Humano Maquina) para selección de la lógicade control
La selección del modo de operación (0.0) (control de la velocidad, caudal, potencia) se realiza de acuerdo a laopción mas adecuada en un momento dado.
Cuando ocurre una falla el sistema cambia automáticamente a otro modo de operación posible (por ejemplo a“Control de Caudal”) o detiene la unidad.
La detección interna de Red Aislada (0.1) vigila las desviaciones de frecuencia con relación al valor nominal de 50Hz, que se toma como el 100%.
Cuando se alcanza alguno de los límites superior o inferior del rango de velocidad se genera el mensaje “isolatednetwork (internal detection)” “red aislada (detección interna)”.
Este mensaje aparece siempre y cuando no exista una señal de comando de red aislada.
El modo de trabajo en “Red Aislada” se mantiene mientras la velocidad se encuentre fuera del rango de velocidad osi se envía el comando de red aislada.
Siempre que se opera en modo “red aislada” el control pasa al Control de Velocidad.
Se seleccionan los parámetros de red aislada (KP, TN, bp) y se disponen todas las agujas en operación.

“Uno no descubre nuevas tierras sin aceptar perder de vista la orilla durante mucho tiempo”Andre Gide
Santa Cruz, Av San Martin 1290, [email protected], tel. 342-2099, 345-2465Cochabamba, Venezuela E-0866, [email protected], fax 452-3413, tel 452-3438
5
5
Fig. 3: Transmisores INOR montables en riel DIN de señal de sensores detemperatura por resistencia (pT100) a 4-20 mA, que entran al sistema de
monitoreo de temperaturas de turbina. Lo sensores informan la temperatura delos asientos.
La mención que se hace a KP, TN y bp, se refiere a las constantes utilizadas parasintonizar el lazo PID de Control de Velocidad; por otro lado bp se refiere al estatismo.
KP es la constante de proporcionalidad, también llamada “ganancia” o “amplificación”.
TN es la constante de integración, o la corrección que se hace cuando el valor de lavelocidad permanece durante un determinado periodo de tiempo, al cual se llamaadecuadamente: el periodo de integración.
El controlador de turbina se supervisa a si mismo verificando continuamente el voltaje de alimentación (24 Vdc) y lasecuencia del programa (watchdog function) (función de perro guardián).
La función de “perro guardián” es una función común en los PLCs. Consiste en una rutinaque realiza el PLC en la primera parte de cada ciclo o “barrido” de ejecución de la lógicaprogramada.
En esta rutina, el PLC verifica el estado de sus circuitos internos. Si todo esta bien, el PLCsigue ejecutando su rutina de control. Si alguna de sus partes esta en mal estado, da unmensaje de alarma y detiene la ejecución del programa.
En sistemas de control que se aplican a equipos peligrosos, esta función toma una granimportancia.
También verifica simultáneamente el estatus de los canales de entradas y salidas binarias y analógicas, los circuitosde posicionamientos, las tareas activas y sus tiempos de ciclo (0.2).

“Uno no descubre nuevas tierras sin aceptar perder de vista la orilla durante mucho tiempo”Andre Gide
Santa Cruz, Av San Martin 1290, [email protected], tel. 342-2099, 345-2465Cochabamba, Venezuela E-0866, [email protected], fax 452-3413, tel 452-3438
6
6
La lógica de start/stop permite el arranque y parada automático de la unidad.
Por defecto el arranque automático lleva a la unidad hasta la velocidad nominal con dos agujas en operación.
El arranque automático no incluye el control de las funciones auxiliares.
Cuando se emite el comando “TC start” el limitador de apertura se ajusta para iniciar la apertura.
Cuando ocurre un rechazo de carga el punto de ajuste de la rampa se ajustan hacia atrás para permitir unaresincronización inmediata (set point de velocidad igual a 100%, limitador de apertura igual a 50%).
Después de que la unidad esta sincronizada el limitador de apertura se ajusta a su máximo valor.
Cuándo se selecciona paro del controlador de la turbina o TC, el limitador de apertura salta a la posición máxima deapertura de aguja y regresa siguiendo su rampa de cierre de velocidad hasta su valor mínimo.
Cuando ocurre una Parada Rápida (0.4), el limitador salta a su valor mínimo.
Cuando esta funcionando en vacío se puede llevar la turbina a sobre velocidad con solo dos agujas en operaciónmediante el panel del operador. De esta forma se pueden hacer pruebas de las protecciones eléctricas y mecánicas desobre velocidad (0.5).
Para comodidad del operador de la turbina, se puede lograr que la pantalla del operador guarde el valor máximo dela velocidad. La selección de agujas (0.6) selecciona el número óptimo de agujas en función del punto de operación(carga). El valor de cambio se deriva a partir del set point de flujo (7.0). La aguja con la prioridad más alta, bajooperación continua, se puede seleccionar externamente. El resto de las agujas se activan de forma tal que permitenobtener una carga balanceada sobre los descansos.
Fig. 4: Descanso de turbina. En la parte superior se puede apreciar lainstalación del medidor de vibración BALMAC. En la parte inferior se puede
apreciar los sensores de nivel de aceite máximo y mínimo VEGA.

“Uno no descubre nuevas tierras sin aceptar perder de vista la orilla durante mucho tiempo”Andre Gide
Santa Cruz, Av San Martin 1290, [email protected], tel. 342-2099, 345-2465Cochabamba, Venezuela E-0866, [email protected], fax 452-3413, tel 452-3438
7
7
Fig. 5: Medidor de vibración Balmac. Convierte la vibración en el rango de 0-1pulgada/segundo a una señal de 4-20 mA.
Sección Posicionamiento
Fig. 6: Pantalla DirectTouch de tipo Touch Screen para monitoreo de nivel de aceite,temperaturas de asientos, vibracion, alarmas en válvulas.
“Uno no descubre nuevas tierras sin aceptar perder de vista la orilla durante mucho tiempo”Andre Gide
Santa Cruz, Av San Martin 1290, [email protected], tel. 342-2099, 345-2465Cochabamba, Venezuela E-0866, [email protected], fax 452-3413, tel 452-3438
8
8
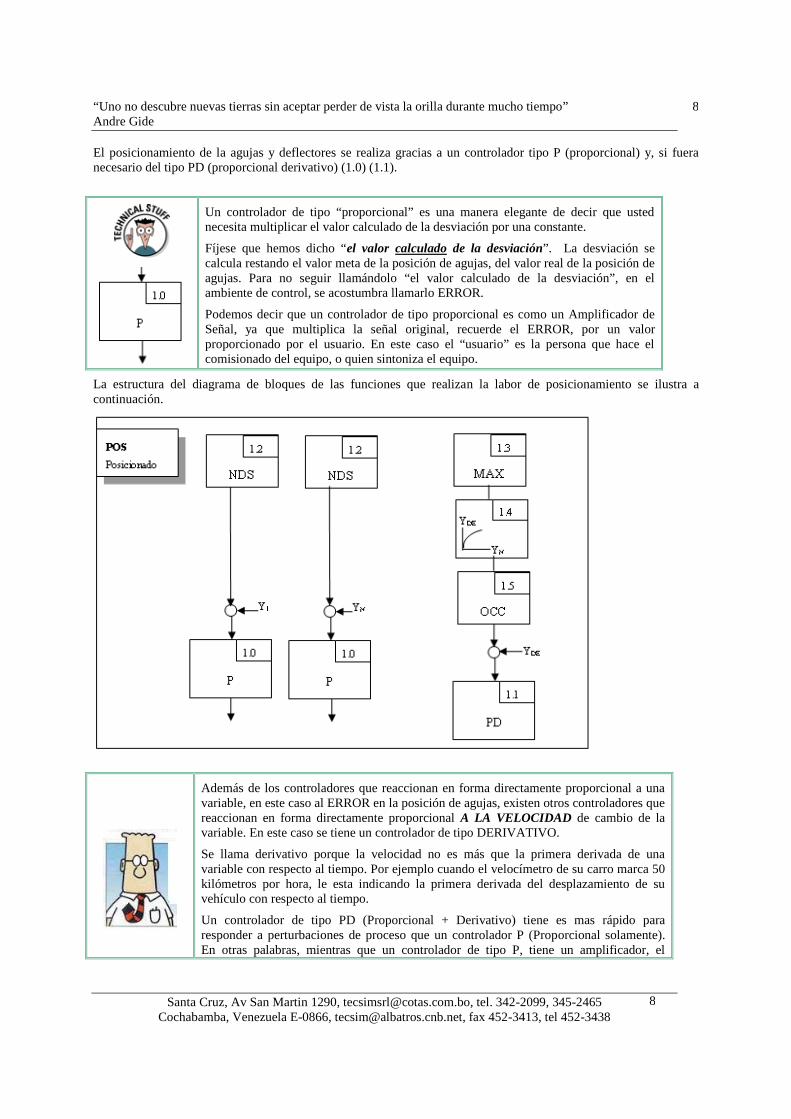
El posicionamiento de la agujas y deflectores se realiza gracias a un controlador tipo P (proporcional) y, si fueranecesario del tipo PD (proporcional derivativo) (1.0) (1.1).
Un controlador de tipo “proporcional” es una manera elegante de decir que ustednecesita multiplicar el valor calculado de la desviación por una constante.
Fíjese que hemos dicho “el valor calculado de la desviación”. La desviación secalcula restando el valor meta de la posición de agujas, del valor real de la posición deagujas. Para no seguir llamándolo “el valor calculado de la desviación”, en elambiente de control, se acostumbra llamarlo ERROR.
Podemos decir que un controlador de tipo proporcional es como un Amplificador deSeñal, ya que multiplica la señal original, recuerde el ERROR, por un valorproporcionado por el usuario. En este caso el “usuario” es la persona que hace elcomisionado del equipo, o quien sintoniza el equipo.
La estructura del diagrama de bloques de las funciones que realizan la labor de posicionamiento se ilustra acontinuación.
Además de los controladores que reaccionan en forma directamente proporcional a unavariable, en este caso al ERROR en la posición de agujas, existen otros controladores quereaccionan en forma directamente proporcional A LA VELOCIDAD de cambio de lavariable. En este caso se tiene un controlador de tipo DERIVATIVO.
Se llama derivativo porque la velocidad no es más que la primera derivada de unavariable con respecto al tiempo. Por ejemplo cuando el velocímetro de su carro marca 50kilómetros por hora, le esta indicando la primera derivada del desplazamiento de suvehículo con respecto al tiempo.
Un controlador de tipo PD (Proporcional + Derivativo) tiene es mas rápido pararesponder a perturbaciones de proceso que un controlador P (Proporcional solamente).En otras palabras, mientras que un controlador de tipo P, tiene un amplificador, el

“Uno no descubre nuevas tierras sin aceptar perder de vista la orilla durante mucho tiempo”Andre Gide
Santa Cruz, Av San Martin 1290, [email protected], tel. 342-2099, 345-2465Cochabamba, Venezuela E-0866, [email protected], fax 452-3413, tel 452-3438
9
9
controlador de tipo PD tiene 2 amplificadores. El efecto combinado de ambosamplificadores es una mejora en cierto tipo de procesos.
Los procesos que se pueden beneficiar del uso de un controlador PD son aquellos quesufren cambios súbitos en la variable de proceso y que requieren una respuesta ágil departe del sistema de control.
La salida del circuito de posicionamiento opera la servo válvula a través de un transductor V/I (voltaje corriente).Los circuitos de posicionamiento son verificados continuamente por la rutina de protección del controlador. Si elcontrolador detecta un mal funcionamiento en el circuito de posicionamiento emite un mensaje en el estilo de “fallaen el control de posicionamiento”. Los servomotores también pueden ser posicionados desde una pantalla o HMI(Internase Humando Maquina) para propósitos de pruebas y mantenimiento.
NOTA: Recuerde que NDS significa Needle Discharge, es decir Descarga deAguja
El bloque NDS o Descarga de Aguja, tiene como función permitir que cuando se para la unidad, la tubería de latobera puede ser vaciada por medio de la apertura de una aguja (1.2).
En términos generales, los controladores permiten que la apertura del servomotor de las agujas y su intervalo detiempo pueden ajustarse libremente. La apertura y cierre de las agujas se puede hacer por medio de los bloques defunción de selección de las agujas (0.6) (3.2) (3.3).
El set point del deflector se ajusta a partir del set point máximo de aguja por medio de una leva (relación de posiciónaguja/deflector) (1.4)
YDE es la posición del Deflector
YN es la posición de la Aguja (Needle en ingles)
La relación entre la posición del deflector y la posición de la aguja, sigue una relación funcional llamada “leva”.Este nombre obedece a que el controlador electrónico reproduce digitalmente el comportamiento de una levamecánica mediante una curva que relaciona cada valor de posición de leva con un valor correspondiente y único deposición de aguja. La curva bidimensional de la leva, definida por el controlador electrónico, se define utilizando 11puntos de la relación de posición de aguja y deflector. Las posiciones intermedias se interpolan de forma lineal.
Cuando se opera en los modos de red aislada y en vacío la unidad esta siempre bajo el control de la curva de la leva.
En el modo paralelo el deflector se puede operar en control de leva apagada (1.5) llevándolo hasta su aperturamáxima.
OCC: Off Cam Control, es decir control fuera de leva.
Cuando se hace esto el deflector no intercepta el chorro de agua durante cambios rápidos de carga.

“Uno no descubre nuevas tierras sin aceptar perder de vista la orilla durante mucho tiempo”Andre Gide
Santa Cruz, Av San Martin 1290, [email protected], tel. 342-2099, 345-2465Cochabamba, Venezuela E-0866, [email protected], fax 452-3413, tel 452-3438
10
10
Sección Limitador de AperturaEl valor actual del limitador de apertura limita el set point de aguja por medio de un bloque de función de valormínimo (2.1).
El limitador de apertura (2.0) puede ajustarse entre –5 y 105%.
OPL: Opening Limiter,es decir, limitador deapertura
MIN: Bloque de función Mínima
Se llama “un bloque defunción” MINIMA, y seabrevia MIN, a una rutina desoftware de programación delcontrolador, que tiene variasentradas y una salida.
La función MIN selecciona elmenor de los valores de entrelas entradas, y lo coloca en lasalida del bloque de función.

“Uno no descubre nuevas tierras sin aceptar perder de vista la orilla durante mucho tiempo”Andre Gide
Santa Cruz, Av San Martin 1290, [email protected], tel. 342-2099, 345-2465Cochabamba, Venezuela E-0866, [email protected], fax 452-3413, tel 452-3438
11
11
Sección Selección De AgujasEsta sección del programa de control decide el par de agujas que se van a usar en un momento determinado.
En el modo paralelo el caudal total definido por la selección de modo de operación (3.0) se adapta con la señal dealtura (3.1).
El bloque de función 3.0 es la representación en software de un selector de 3posiciones. Este bloque tiene 3 opciones de las cuales puede elegir una de ellas queserá la que alimente al selector de agujas que se encuentra mas abajo en el diagrama.
Las 3 opciones se refieren a las salidas de los 3 algoritmos de control disponibles en elcontrolador electrónico. La primer opción del selector 3.0 es la salida entregada por elControlador de Nivel de Agua. La segunda opción del selector 3.0 es la salida delControlador de Caudal. Esta opción es la más ágil de las opciones de control. La terceraopción del selector 3.0 es la salida del controlador de Potencia.

“Uno no descubre nuevas tierras sin aceptar perder de vista la orilla durante mucho tiempo”Andre Gide
Santa Cruz, Av San Martin 1290, [email protected], tel. 342-2099, 345-2465Cochabamba, Venezuela E-0866, [email protected], fax 452-3413, tel 452-3438
12
12
El bloque de función 3.1 toma el valor que fue entregado por el bloque selector 3.0 y lodivide entre la raíz cuadrada de la altura h. La altura h es la presión de agua que existe.
Gracias a que se esta sacando la raíz cuadrada de este valor, los cambios en presióntienen un efecto mensurable pero mínimo.
Un filtro de segundo orden (3.4) es una función que permite realizar la transferencia en forma suave durante laapertura y cierre de agujas definida por la selección de agujas (3.3).
De acuerdo con las características de las agujas el cálculo de las señales de set point de agujas (3.5) se conecta através de la lógica de selección (3.6).
Note que el bloque de función 3.5, es una curva que representa una función. En el ejehorizontal esta el caudal y en el eje vertical la posición de aguja. Esta curva, estableceuna relación funcional entre caudal y posición de agujas. Para cada caudal deseado,corresponde una posición específica de las agujas. Esta curva asume una presión deentrada de agua fija. El caudal no se “mide” sino que se calcula, de acuerdo a lascaracterísticas de diseño de las toberas.
El bloque de selección 3.6, le permite elegir cual de los dos bloques selectores deaguja, será el que tiene preeminencia al momento de entregar la decisión de apertura deagujas.
Una de las opciones proviene del selector de agujas que recibe información delControlador de velocidad. Ese selector se llama bloque 3.2 en el diagrama general.
La otra opción proviene del selector de agujas que recibe información de los otros 3algoritmos de control. Ese selector se llama bloque 3.3 en el diagrama general.
En el modo aislado y en vacío las señales de set point de agujas calculadas por el controlador de velocidad seconectan a través de la lógica de selección (3.2) (3.6).
“Uno no descubre nuevas tierras sin aceptar perder de vista la orilla durante mucho tiempo”Andre Gide
Santa Cruz, Av San Martin 1290, [email protected], tel. 342-2099, 345-2465Cochabamba, Venezuela E-0866, [email protected], fax 452-3413, tel 452-3438
13
13
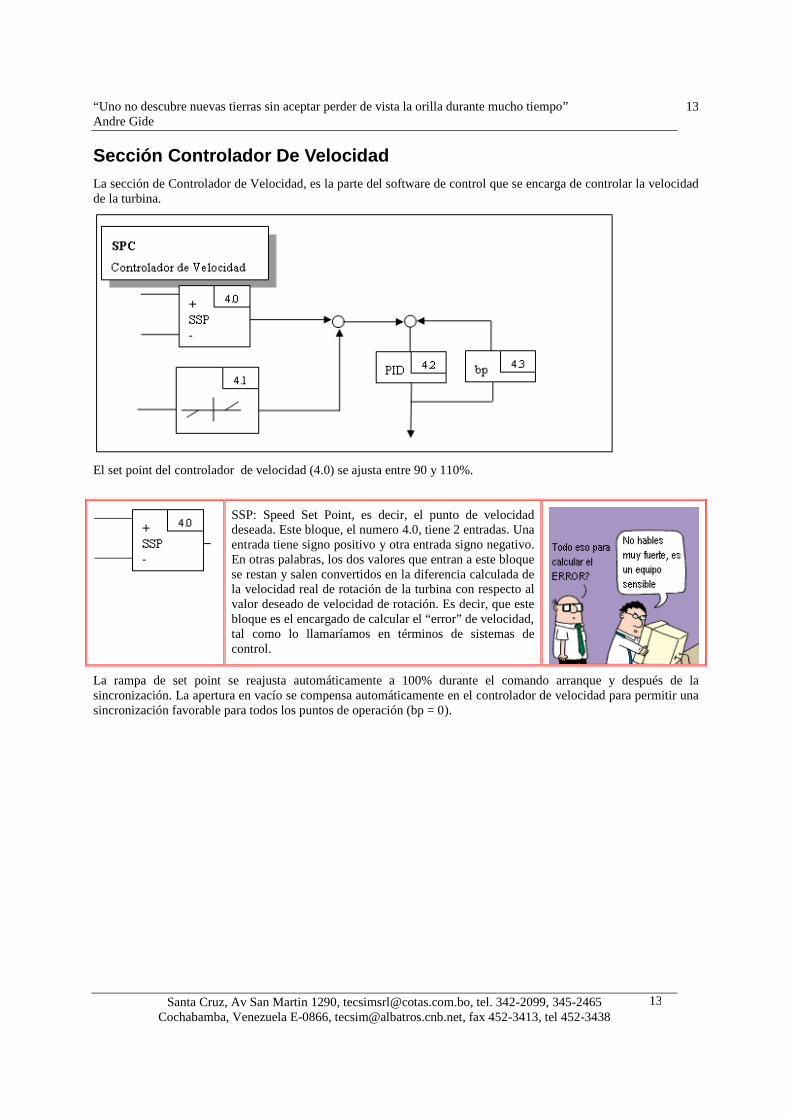
Sección Controlador De VelocidadLa sección de Controlador de Velocidad, es la parte del software de control que se encarga de controlar la velocidadde la turbina.
El set point del controlador de velocidad (4.0) se ajusta entre 90 y 110%.
SSP: Speed Set Point, es decir, el punto de velocidaddeseada. Este bloque, el numero 4.0, tiene 2 entradas. Unaentrada tiene signo positivo y otra entrada signo negativo.En otras palabras, los dos valores que entran a este bloquese restan y salen convertidos en la diferencia calculada dela velocidad real de rotación de la turbina con respecto alvalor deseado de velocidad de rotación. Es decir, que estebloque es el encargado de calcular el “error” de velocidad,tal como lo llamaríamos en términos de sistemas decontrol.
La rampa de set point se reajusta automáticamente a 100% durante el comando arranque y después de lasincronización. La apertura en vacío se compensa automáticamente en el controlador de velocidad para permitir unasincronización favorable para todos los puntos de operación (bp = 0).

“Uno no descubre nuevas tierras sin aceptar perder de vista la orilla durante mucho tiempo”Andre Gide
Santa Cruz, Av San Martin 1290, [email protected], tel. 342-2099, 345-2465Cochabamba, Venezuela E-0866, [email protected], fax 452-3413, tel 452-3438
14
14
La banda muerta de frecuencia (4.1) actúa durante la operación en paralelo.
El bloque 4.1 es un bloque de histéresis.
Es decir que durante los cambios de velocidad que no seconsideren significativos, la posición de las agujas semantiene donde estaba. De esta manera se conservamejor el equipo, ya que hay menos maniobras deposicionamiento.
Se realizan posiciones de maniobra en aquellos casos enque es estrictamente necesario para mantener el sistemafuncionando de acuerdo a las especificaciones delusuario.
El límite de banda muerta se puede ajustar libremente. El controlador de velocidad en paralelo esdel tipo PID (4.2).
El controlador del bloque 4.2, determina el set point para las posiciones del servomotor de agujacalculando la diferencia entre el valor de velocidad fijado y el real.
El droop (o estatismo) permanente de velocidad (4.3) determina la influencia delos cambios de frecuencia sobre la salida del controlador (operación en redaislada).
La función de transferencia del controlador de velocidad cuando despreciamosel retraso del término diferencial es:
G(s) = KP * { 1 + 1/TN*s + TD*s }
1 + KP * { 1 + 1/TN*s + TD*s } * bp
Si consideramos un droop de velocidad permanente bp = 0.
G(s) = KP * { 1 + 1/TN*s + TD*s }
La salida del controlador de velocidad no sigue a las otras salidas de los controladores.
La función de transferencia es la descripción matemática del comportamiento delcontrolador. Se supone que las matemáticas son mas sencillas de entender queuna descripción oral ¿?
Las matemáticas tienen la ventaja de ser un lenguaje universal, por tanto lamisma ecuación se puede escribir en alemán y sigue representando el mismocomportamiento del controlador. Por eso se usan para describir elcomportamiento de un controlador.
La ecuación original puede ser dividida en2 partes para su análisis.
Estas 2 partes son: La parte de arriba y La parte de abajo.
O dicho matemáticamente: El Numerador. El Denominador.
G(s) = KP * { 1 + 1/TN*s + TD*s }
1 + KP * { 1 + 1/TN*s + TD*s } * bp
“Uno no descubre nuevas tierras sin aceptar perder de vista la orilla durante mucho tiempo”Andre Gide
Santa Cruz, Av San Martin 1290, [email protected], tel. 342-2099, 345-2465Cochabamba, Venezuela E-0866, [email protected], fax 452-3413, tel 452-3438
15
15
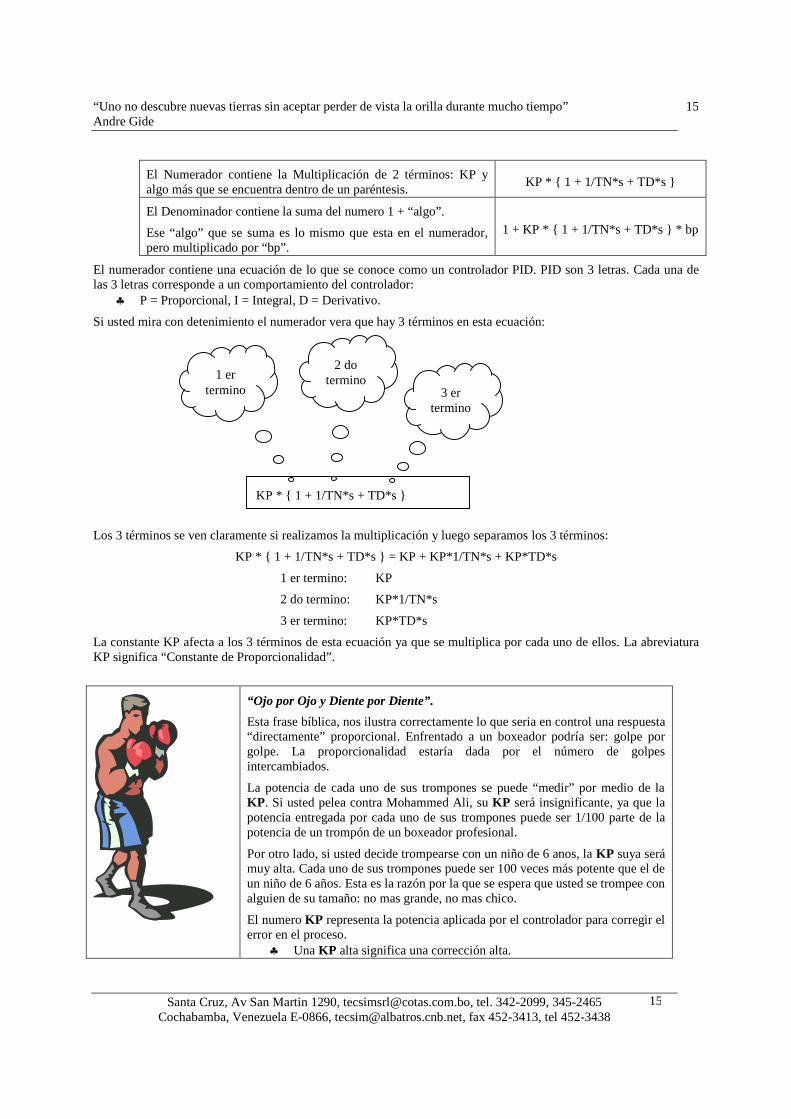
El Numerador contiene la Multiplicación de 2 términos: KP yalgo más que se encuentra dentro de un paréntesis.
KP * { 1 + 1/TN*s + TD*s }
El Denominador contiene la suma del numero 1 + “algo”.
Ese “algo” que se suma es lo mismo que esta en el numerador,pero multiplicado por “bp”.
1 + KP * { 1 + 1/TN*s + TD*s } * bp
El numerador contiene una ecuación de lo que se conoce como un controlador PID. PID son 3 letras. Cada una delas 3 letras corresponde a un comportamiento del controlador:
P = Proporcional, I = Integral, D = Derivativo.
Si usted mira con detenimiento el numerador vera que hay 3 términos en esta ecuación:
Los 3 términos se ven claramente si realizamos la multiplicación y luego separamos los 3 términos:
KP * { 1 + 1/TN*s + TD*s } = KP + KP*1/TN*s + KP*TD*s
1 er termino: KP
2 do termino: KP*1/TN*s
3 er termino: KP*TD*s
La constante KP afecta a los 3 términos de esta ecuación ya que se multiplica por cada uno de ellos. La abreviaturaKP significa “Constante de Proporcionalidad”.
“Ojo por Ojo y Diente por Diente”.Esta frase bíblica, nos ilustra correctamente lo que seria en control una respuesta“directamente” proporcional. Enfrentado a un boxeador podría ser: golpe porgolpe. La proporcionalidad estaría dada por el número de golpesintercambiados.
La potencia de cada uno de sus trompones se puede “medir” por medio de laKP. Si usted pelea contra Mohammed Ali, su KP será insignificante, ya que lapotencia entregada por cada uno de sus trompones puede ser 1/100 parte de lapotencia de un trompón de un boxeador profesional.
Por otro lado, si usted decide trompearse con un niño de 6 anos, la KP suya serámuy alta. Cada uno de sus trompones puede ser 100 veces más potente que el deun niño de 6 años. Esta es la razón por la que se espera que usted se trompee conalguien de su tamaño: no mas grande, no mas chico.
El numero KP representa la potencia aplicada por el controlador para corregir elerror en el proceso.
Una KP alta significa una corrección alta.
KP * { 1 + 1/TN*s + TD*s }
3 ertermino
2 dotermino1 er
termino

“Uno no descubre nuevas tierras sin aceptar perder de vista la orilla durante mucho tiempo”Andre Gide
Santa Cruz, Av San Martin 1290, [email protected], tel. 342-2099, 345-2465Cochabamba, Venezuela E-0866, [email protected], fax 452-3413, tel 452-3438
16
16
Una KP baja, hace correcciones suaves.
El segundo termino KP*1/TN*s muestra la KP multiplicada 1 dividida entre TN y entre s.
Recuerde que estamos trabajando con una ecuación matemática de tipo algebraica.
Pero al mismo tiempo, mantenga en su mente que esta es una ecuación algebraica que resulta de usar unatransformada de La Place. ¿Y eso que significa? Significa que EN REALIDAD estamos trabajando con ecuacionesdiferenciales en el dominio del tiempo, que fueron “convertidas” a ecuaciones algebraicas por medio de latransformada de La Place, para poder ser manejadas en forma sencilla.
Cuando hacemos este tipo de transformaciones, aparecen letras “s” en nuestra ecuación. Cuando la “s” se encuentraen el denominador, es decir cuando tenemos un termino 1/s, en realidad estamos hablando de una integral.
En síntesis, el segundo término, KP*1/TN*s, se refiere a una integral del error, que se multiplica por la constante deproporcionalidad con la cual usted ya se ha familiarizado.
¿Y que significa entonces la constante TN? Este valor indica la “importancia” o “la potencia” de la respuestaintegral en el controlador.
El tercer termino KP*TD*s, es el termino DERIVATIVO.
En la transformada de La Place, una “s” multiplicando en el numerador, representa una primera derivada de lavariable. La primera derivada de un variable es la velocidad con que dicha variable cambia en el tiempo. Y secalcula como la magnitud del cambio, dividida entre la unidad de tiempo en que ocurrió dicho cambio. En este caso,la variable de la que estamos hablando es el “error”.
Sección Controlador De Potencia
Fig. 6: Transmisor Dataforth de montaje en riel DIN para convertir la señal de0-100 mV a una señal de 4-20 mA. En otros sectores se usan los convertidores
de frecuencia de rotación de turbina para 4-20 mA.
El controlador de potencia, se encarga de controlar la velocidad de la turbina en función de la potencia que senecesita. Para esto necesita medir la potencia mediante un transductor de potencia que entregue una señal de 4 a 20miliamperios al controlador.

“Uno no descubre nuevas tierras sin aceptar perder de vista la orilla durante mucho tiempo”Andre Gide
Santa Cruz, Av San Martin 1290, [email protected], tel. 342-2099, 345-2465Cochabamba, Venezuela E-0866, [email protected], fax 452-3413, tel 452-3438
17
17
El set point del controlador de potencia (6.0) se ajusta entre -5 y 105%.
PSP es la abreviatura de Power Set Point, es decir, el valor meta de la potencia.
El bloque 6.0 es un bloque matemático, que resta 2 valores.
La diferencia de ambos valores es lo que constituye el “error”.
El dato del error se alimenta al controlador para determinar la accion a tomar.
El modo de operación por control de potencia puede ser seleccionado solamente cuando la unidad opera en paralelo.
Durante todos los otros modos de operación el set point de potencia sigue a la potencia activa del momento. De estamanera es posible realizar una transferencia suave entre modos en cualquier momento.
La señal de set point viene a través de un filtro de segundo orden (6.4).
Un filtro de segundo orden es una función matemática que tiene un valor de entrada y unvalor de salida.
El valor de entrada al filtro, es la señal “cruda”, es decir, antes del proceso de filtrado.
A la salida del filtro se encuentra la misma señal, pero libre de las variaciones debidas alruido electrónico que se suma en la señal.
De esta forma se obtiene una apertura y cierre suave de las agujas.
El valor de constante de tiempo del filtro (3.4) (6.4) es reversible para una igualación rápida de agujas.
La señal de potencia activa llega a través de un filtro de señal (6.1).

“Uno no descubre nuevas tierras sin aceptar perder de vista la orilla durante mucho tiempo”Andre Gide
Santa Cruz, Av San Martin 1290, [email protected], tel. 342-2099, 345-2465Cochabamba, Venezuela E-0866, [email protected], fax 452-3413, tel 452-3438
18
18
Un filtro de señal de primer orden como el del bloque 6.1, tiene la función de“limpiar” la señal.
La señal de potencia proviene de un sensor de potencia que calcula su salida yla transmite por 4 a 20 miliamperios.
Esta señal puede llegar distorsionada a causa del ruido electromagnético alCPU del controlador.
Por esto se la filtra.
El valor de la constante de tiempo del filtro es ajustable.
El controlador de potencia es un controlador de corrección con ajuste hacia delante (feedforward).
Los lazos de control requieren información para funcionar.
El tipo mas común de información que manejan los lazos de control es la“retro alimentación”. Es decir, la medición de una variable para saber si laacción tomada por el controlador fue efectiva o no.
Pero existe además de la retro alimentación, otro tipo de información quemanejan los lazos de control, la llamada “alimentación hacia delante”, ofeedforward. La señal feedforward es una señal que sabemos que va aafectar el proceso, aun antes de que comiencen a verse sus efectos. Por esose usa para afectar el comportamiento del controlador, anticipándose a losefectos esperados.
El controlador paralelo (6.3) de tipo PI, calcula la ganancia del filtro de segundo orden.
El set point de potencia es la variable de entrada de referencia para los set points de servomotor de aguja.
La función de transferencia del controlador de potencia es:
G(s) = KP * { 1 + 1/TN*s)
Si hubiera desviaciones de frecuencia del valor nominal, el valor de compensación de frecuencia se determina pormedio del droop (estatismo) de potencia frecuencia (6.2).

“Uno no descubre nuevas tierras sin aceptar perder de vista la orilla durante mucho tiempo”Andre Gide
Santa Cruz, Av San Martin 1290, [email protected], tel. 342-2099, 345-2465Cochabamba, Venezuela E-0866, [email protected], fax 452-3413, tel 452-3438
19
19
Sección Controlador De CaudalEl controlador de caudal es la sección del programa de control que decide los cambios que se debe hacer en lasagujas en función del caudal.
El set point del controlador de caudal (7.0) se ajusta entre -5 y 105%.
El set point de caudal puede seguir a un TC externo.
El modo de operación por control de caudal puede ser seleccionado solamente cuando la unidad opera en paralelo.
Durante todos los otros modos de operación el set point de caudal sigue al caudal del momento. De esta manera esposible realizar una transferencia suave entre modos en cualquier momento.
El set point para posiciones de servomotor de agujas se calcula a partir del set point de caudal y del número actualde agujas en operación.
El caudal actual (7.1) se calcula a partir de la altura del número actual de agujas en operación y de sus aperturas.
Si hubiera desviaciones de frecuencia del valor nominal, el valor de compensación de frecuenciase determina por medio del droop (estatismo) de caudal frecuencia (7.2).
J.S.
Cual es su opinión sobre este número del Boletín. ¿Cumplimos con sus expectativas? Hágamelo saber y sugiéranoslos temas que le preocupan en su planta.