Embed Size (px)
Citation preview

A Novel Robust Extended Dissipativity State Feedback Control system design
for Interval Type-2 Fuzzy Takagi-Sugeno Large-Scale Systems
Mojtaba Asadi Jokar, Iman Zamani, Mohamad Manthouri*, Mohammad Sarbaz
Electrical and Electronic Engineering Department, Shahed University, Tehran, Iran * Corresponding author. Tel.: +98 21 51212029.
E-mail addresses: [email protected], [email protected], [email protected],
Abstract: In this paper, we use the advantage of large-scale systems modeling based on the type-2 fuzzy Takagi
Sugeno model to cover the uncertainties caused by large-scale systems modeling. The advantage of using membership
function information is the reduction of conservatism resulting from stability analysis. Also, this paper uses the
extended dissipativity robust control performance index to reduce the effect of external perturbations on the large-
scale system, which is a generalization of 𝐻∞, 𝐿2 − 𝐿∞, passive, and dissipativity performance indexes and control
gains can be achieved through solving linear matrix inequalities (LMIs), so the whole closed-loop fuzzy large-scale
system is asymptotically stable.. Finally, the effectiveness of the proposed method is demonstrated by a numerical
example of a double inverted pendulum system.
Keywords: membership function dependent, type-2 fuzzy, large-scale system, extended dissipativity, state
feedback.
I. Introduction
Since years ago, with the expansion and complexity of industries, a challenge in the engineering has been control
of processes like mechanical engineering, electrical engineering, chemical engineering, or so. Many algorithms and
approaches have proposed in dealing with the instability of systems. But since decades ago, systems have been turned
to large in scope and dynamic. Consequently, control of the process has become an essential task and the main problem
facing such systems is the complexity of mathematical relationships that make it hard to solve in practice. Various
controllers have been designed to encounter the instability of systems in both industry and academic like adaptive
control, fuzzy control, etc. To design an effective and authentic controller, the dynamic of the system should be
identified exactly and it is an important step. In large-scale systems, it is almost impossible to identify the dynamic of
the system accurately. Hence, the well-known method, fuzzy logic is used. Also, it is confirmed that the Takagi-
Sugeno (T-S) model is a powerful tool to approximate any nonlinear systems with arbitrarily high accuracy. The
Takagi-Sugeno fuzzy system shows the dynamic behavior of the nonlinear system with the weighted sum of local
linear systems, which are determined by the membership functions.
Todays, many systems in both industry and academic are large-scale, and have been popular for years [1] and [2].
Besides, many systems specially control systems have become large in scope and complex in computation [3]. These
type of the systems are modeled by a number of independent subsystems which work independently with some
interactions [4]. Since years ago, lots of researches have been done in large-scale systems and gain many attentions
[5], [6], and [7]. Recently, fuzzy systems with IF-THEN rules have become more broad appeal and most of the
nonlinear and complex systems are estimated by fuzzy logic [8]. One of the powerful tools, which can fill the gap
between linear and severe nonlinear systems is Takagi-Sugeno fuzzy model. Many investigations have been done
based on the T-S fuzzy model [9] and [10]. [11] and [12] propose a type of fuzzy inference system popular Takagi-
Sugeno, fuzzy model. In [13], Takagi-Sugeno fuzzy model is selected to represent the dynamic of the unknown
nonlinear system. In [14], the stability of the fuzzy time-varying fuzzy large-scale system based on the piecewise
continuous Lyapunov function investigate. Since systems always have uncertainty or perturbation parameters, several
papers, including [15] and [16] have studied the robust control criterion such as 𝐻∞ control criterion for large-scale
systems. [17] and [18] design a nonlinear state feedback controller for each subsystem. In [15], the stability and
stabilization conditions of large-scale fuzzy systems obtained through Lyapunov functions and also by using the
continuous piecewise Lyapunov functions, they have performed stability analysis and 𝐻∞ based controller design for
large-scale fuzzy systems. The author in [19] design an approach for stability analysis of T-S fuzzy systems via
piecewise quadratic stability. The design of robust fuzzy control for exposure to nonlinear time-delay system modeling
error also presented in [20]. Also, in [16], the reference tracking problem using decentralized fuzzy 𝐻∞ control is

investigated. [5] Designed decentralized linear controllers to stabilize the large-scale system using the Riccati equation
basis, which increases the local state feedback gain if the number of subsystems is large.
Obviously it seems that taking the advantage of modeling systems based on type-2 fuzzy Takagi-Sugeno model to
cover the uncertainties caused by large-scale systems modeling has not been studied yet and several problems remind
unsolved. So the contribution of this paper can be summarized as: In the first step, we analyze the stability of the large-
scale system by using a fuzzy type-2 model based on membership functions, and by using the fuzzy model type-2
decentralized state feedback controller, we stabilize the large-scale system. The advantage of using membership
functions in the stability analysis is the reduction of conservatism in the stability analysis. Also, under the imperfect
premise matching, the type-2 fuzzy controller can choose the premise membership functions and the number of rules
different from the type-2 fuzzy model freely. Next, to reduce the effect of external perturbations on the large-scale
system, we apply the robustness control criterion to the stability analysis, which can guarantee the extended
dissipativity index that describes in definition1 in the appendix. Finally, a large-scale system was given to illustrate
the effectiveness of the proposed method.
The rest of this paper is: Section II formulates the problem. In section III, stability conditions are given. In section
IV, the numerical example presented, and section V, demonstrate the effectiveness of the proposed methods.
II. Problem Formulation
Consider a large-scale nonlinear system with uncertainty parameters that have 𝑁 subsystem and in a closed-loop
system with a state feedback controller. The mathematical representation of this closed-loop system is based on the
Takagi-Sugeno type-2 fuzzy model. Equation (1) shows a 𝑝-rule of the Takagi-Sugeno type-2 fuzzy model for the 𝑖th
subsystem in the large-scale system:
𝑷𝒍𝒂𝒏𝒕 𝒐𝒇 𝑺𝒖𝒃− 𝑺𝒚𝒔𝒕𝒆𝒎 𝒊:
𝑰𝑭 𝜍𝑖1(𝑡)𝑖𝑠 𝐹𝑖1, 𝜍𝑖2(𝑡)𝑖𝑠 𝐹𝑖2𝑙 𝑎𝑛𝑑…𝑎𝑛𝑑 𝜍𝑖𝜓(𝑡)𝑖𝑠 𝐹𝑖𝜓
𝑙
𝑻𝑯𝑬𝑵
{
�̇�𝑖(𝑡) =∑�̃�𝑖𝑙(𝑥𝑖(𝑡))
(
(𝐴𝑖𝑙𝑥𝑖(𝑡) + 𝐵𝑖𝑙𝑢𝑖(𝑡)) + 𝐷1𝑖𝑙𝜔𝑖(𝑡) +∑ �̅�𝑖𝑘𝑙𝑥𝑘(𝑡)
𝑁
𝑘=1𝑘≠𝑖
)
𝑟
𝑙=1
(1)
where 𝐹𝑖𝜙𝑙 (𝜙 = 1.2… .𝜓) is a fuzzy set, and 𝜍𝑖𝜙(𝑡) is a measurable variable. 𝑟 is the number of rules in the subsystem
𝑖th. 𝑥𝑖(𝑡) ∈ 𝑹𝒏 is the state vector of the 𝑖th subsystem. The pairs 𝐴𝑖𝑙 ∈ 𝑹
𝒏×𝒏, 𝐵𝑖𝑙 ∈ 𝑹𝒏×𝒎 and 𝐷1𝑖𝑙are matrices of the
𝑙th model of the 𝑖th subsystem. 𝑢(𝑡) ∈ 𝑹𝒎denotes the input vector. �̅�𝑖𝑘𝑙is the vector of the interactions between the 𝑖th
subsystem and 𝑘th at the 𝑙th rule, and 𝑥𝑘(𝑡) ∈ 𝑹𝒏 is the state vector of the 𝑘th subsystem. 𝑁 represents the total
number of subsystems. 𝜔𝑖(𝑡) ∈ 𝑹𝑚 is the disturbance input belonging to 𝑳2[0,∞); �̃�𝑖𝑙(𝑥𝑖(𝑡)) is a membership
function of the 𝑙th rule of the 𝑖th subsystem, which is represented by (2).
�̃�𝑖𝑙(𝑥𝑖(𝑡)) = 𝛼𝑖𝑙(𝑥𝑖(𝑡))𝑤𝑖𝑙(𝑥𝑖(𝑡)) + 𝛼𝑖𝑙(𝑥𝑖(𝑡))𝑤𝑖𝑙(𝑥𝑖(𝑡)) (2)
Equation (2) is a type reduction in the type-2 fuzzy structure in which 𝛼𝑖𝑙 and 𝛼𝑖𝑙 are nonlinear functions. As the
nonlinear plant is subject to parameter uncertainties �̃�𝑖𝑙(𝑥𝑖(𝑡)) will depend on the parameter uncertainties and thus
leads to the value of 𝛼𝑖𝑙 and 𝛼𝑖𝑙 uncertain. 𝑤𝑖𝑙and 𝑤𝑖𝑙 are lower membership and upper membership degrees,
respectively that characterized by the LMFs and UMFs. Since �̃�𝑖𝑙(𝑥𝑖(𝑡)) is a type-2 membership function, it has the
following properties:
∑�̃�𝑖𝑙(𝑥𝑖(𝑡))
𝑝
𝑙=1
= 1; 0 ≤ 𝛼𝑖𝑙(𝑥𝑖(𝑡)) ≤ 1, 0 ≤ 𝛼𝑖𝑙(𝑥𝑖(𝑡)) ≤ 1, ∀𝑖
𝛼𝑖𝑙(𝑥𝑖(𝑡)) + 𝛼𝑖𝑙(𝑥𝑖(𝑡)) = 1, ∀𝑖
𝑤𝑖𝑙(𝑥𝑖(𝑡)) =∏𝜇𝐹𝑖𝛼𝑙 (𝜍𝑖𝛼(𝑥𝑖(𝑡)))
𝜓
𝛼=1
; 𝑤𝑖𝑙(𝑥𝑖(𝑡)) =∏𝜇𝐹𝑖𝛼𝑙 (𝜍𝑖𝛼(𝑥𝑖(𝑡)))
𝜓
𝛼=1

𝜇𝐹𝑖𝛼𝑙 (𝜍𝑖𝛼(𝑥𝑖(𝑡))) > 𝜇𝐹𝑖𝛼
𝑙 (𝜍𝑖𝛼(𝑥𝑖(𝑡))) ≥ 0; 𝑤𝑖𝑙(𝑥𝑖(𝑡)) ≥ 𝑤𝑖𝑙(𝑥𝑖(𝑡)) ≥ 0, ∀𝑖
𝜇𝐹𝑖𝛼𝑙 and 𝜇
𝐹𝑖𝛼𝑙 are the lower membership functions (LMF) and the upper membership functions (UMF), respectively. 𝜓
is the number of fuzzy sets of the 𝑙th model of the 𝑖th subsystem. Thus �̃�𝑖𝑙(𝑥𝑖(𝑡)) is a linear combination of 𝑤𝑖𝑙 and
𝑤𝑖𝑙 denoted by LMFs and UMFs.
Equation (3) is the Takagi-Sugeno type-2 fuzzy representation for state feedback controller. Unlike the PDC control
method, the membership functions and the number of rules of the fuzzy system model and the controller need not be
the same here. Thus, the membership functions and the number of controller rules relative to the plant model can be
freely chosen. For the 𝑖th subsystem controller we have:
𝑪𝒐𝒏𝒕𝒓𝒐𝒍𝒆𝒓 𝒇𝒐𝒓 𝑺𝒖𝒃 − 𝑺𝒚𝒔𝒕𝒆𝒎 𝒊:
𝑰𝑭 𝑔𝑖1(𝑡)𝑖𝑠 𝑁𝑖1𝑗, 𝑔𝑖2(𝑡)𝑖𝑠 𝑁𝑖2
𝑗 𝑎𝑛𝑑…𝑎𝑛𝑑 𝑔𝑖Ω(𝑡)𝑖𝑠 𝑁𝑖Ω
𝑗
𝑻𝑯𝑬𝑵 𝑢𝑖(𝑡) =∑�̃�𝑖𝑗(𝑥𝑖(𝑡))𝐺𝑖𝑗𝑥𝑖(𝑡)
𝑐
𝑗=1
(3)
where 𝑁𝑖𝛽𝑗
is the fuzzy set of 𝑗th rules of the 𝑖th subsystem, corresponding to the function 𝑔𝛽(𝑡) . The state vector is
𝑥𝑖(𝑡) ∈ 𝑹𝒏 where 𝑐 is the number of control rules of the 𝑖th subsystem. 𝐺𝑖𝑗 ∈ 𝑹
𝒎×𝒏 is the control gain and �̃�𝑖𝑗(𝑥𝑖(𝑡))
is the membership function of 𝑗th rules of the 𝑖th subsystem with these properties:
�̃�𝑖𝑗(𝑥𝑖(𝑡)) =𝛽𝑖𝑗(𝑥𝑖(𝑡))𝑚𝑖𝑗(𝑥𝑖(𝑡)) + 𝛽𝑖𝑗(𝑥𝑖(𝑡))𝑚𝑖𝑗(𝑥𝑖(𝑡))
∑ (𝑐𝑗=1 𝛽𝑖𝑗(𝑥𝑖(𝑡))𝑚𝑖𝑗(𝑥𝑖(𝑡)) + 𝛽𝑖𝑗(𝑥𝑖(𝑡))𝑚𝑖𝑗(𝑥𝑖(𝑡))
(4)
where
∑�̃�𝑖𝑗(𝑥𝑖(𝑡))
𝑐
𝑗=1
= 1, 0 ≤ 𝛽𝑖𝑗(𝑥𝑖(𝑡)) ≤ 1, 0 ≤ 𝛽𝑖𝑗(𝑥𝑖(𝑡)) ≤ 1, ∀𝑗
𝛽𝑖𝑗(𝑥𝑖(𝑡)) + 𝛽𝑖𝑗(𝑥𝑖(𝑡)) = 1, ∀𝑗
𝑚𝑖𝑗(𝑥𝑖(𝑡)) =∏𝜇𝑁𝑖𝛽𝑗 (𝑔𝑖𝛽(𝑥𝑖(𝑡)))
Ω
𝛽=1
, 𝑚𝑖𝑗(𝑥𝑖(𝑡)) =∏𝜇𝑁𝑖𝛽𝑗 (𝑔𝑖𝛽(𝑥𝑖(𝑡)))
Ω
𝛽=1
𝜇𝑁𝑖𝛽𝑗 (𝑔𝑖𝛽(𝑥𝑖(𝑡))) > 𝜇𝑁𝑖𝛽
𝑗 (𝑔𝑖𝛽(𝑥𝑖(𝑡))) ≥ 0, 𝑚𝑖𝑗(𝑥𝑖(𝑡)) > 𝑚𝑖𝑗(𝑥𝑖(𝑡)) ≥ 0
where 𝑚𝑖𝑗(𝑥𝑖(𝑡)) and 𝑚𝑖𝑗(𝑥𝑖(𝑡)) denote the lower and the upper membership degree. 𝛽𝑖𝑗(𝑥𝑖(𝑡)) and 𝛽𝑖𝑗(𝑥𝑖(𝑡)) are
two nonlinear functions. Relation (4) illustrates the part of the type reduction in type-2 fuzzy structure. Ω is the total
number of fuzzy rules for 𝑗th controller rules of the 𝑖th subsystem. 𝜇𝑁𝑖𝛽𝑗 (𝑔𝑖𝛽(𝑥𝑖(𝑡)))and 𝜇
𝑁𝑖𝛽𝑗 (𝑔𝑖𝛽(𝑥𝑖(𝑡))) represent
LMF and UMF, respectively. Finally, the type-2 fuzzy model for 𝑖th sub-system will be:
�̇�𝑖(𝑡) =∑∑ℎ̃𝑖𝑙𝑗 {(𝐴𝑖𝑙 +𝐵𝑖𝑙𝐺𝑖𝑗)𝑥𝑖(𝑡) + 𝐷1𝑖𝑙𝜔𝑖(𝑡) +∑ �̅�𝑖𝑘𝑙𝑥𝑘(𝑡)
𝑁
𝑘=1𝑘≠𝑖
}
𝑟
𝑗=1
𝑟
𝑙=1
(5)
where ℎ̃𝑖𝑙𝑗(𝑥𝑖(𝑡)) from (4) and (4) equals the following relation:
ℎ̃𝑖𝑙𝑗(𝑥𝑖(𝑡)) = �̃�𝑖𝑙(𝑥𝑖(𝑡))�̃�𝑖𝑗(𝑥𝑖(𝑡)) (6)
has the following properties:
∑∑ℎ̃𝑖𝑙𝑗(𝑥𝑖(𝑡))
𝑐
𝑗=1
𝑝
𝑙=1
= 1, ∀𝑖, 𝑗, 𝑙

To facilitate the stability analysis of the large-scale type-2 fuzzy control system, we divide the state space 𝜙 into 𝑞
subspace, i.e., state-space equals 𝜙 = ⋃ 𝜙𝑘𝑞𝑘=1 . Also, to use the information of type-2 membership functions, LMFs
and UMFs are described with uncertainty coverage space or briefly FOUs. Now consider dividing FOUs by 𝜏 + 1
sub-FOU. In the 𝑧th sub-FOU, LMFs and UMFs define as follows:
ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) =∑∑ …∑∏𝜈𝑟𝑖𝑟𝑘𝑧(𝑥𝑟(𝑡))𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧
𝑛
𝑟=1
2
𝑖𝑛=1
2
𝑖1=1
𝑞
𝑘=1
,
ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) =∑∑ …∑∏𝜈𝑟𝑖𝑟𝑘𝑧(𝑥𝑟(𝑡))𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧
𝑛
𝑟=1
2
𝑖𝑛=1
2
𝑖1=1
𝑞
𝑘=1
(7)
with these properties:
0 ≤ 𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧 ≤ 𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧 ≤ 1, 0 ≤ ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) ≤ ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) ≤ 1, 0 ≤ 𝜈𝑟𝑖𝑟𝑘𝑖𝑧(𝑥𝑟(𝑡)) ≤ 1
𝜈𝑟1𝑖𝑟𝑘𝑖𝑧(𝑥𝑟(𝑡)) + 𝜈𝑟2𝑖𝑟𝑘𝑖𝑧(𝑥𝑟(𝑡)) = 1
∑∑…∑∏𝜈𝑟𝑖𝑟𝑘𝑧(𝑥𝑟(𝑡))
𝑛
𝑟=1
2
𝑖𝑛=1
2
𝑖1=1
𝑞
𝑘=1
= 1, 𝑟, 𝑠 = 1,2… , 𝑛; 𝑧 = 1,2… , 𝜏 + 1; 𝑖𝑟 = 1,2;
𝑥(𝑡)𝜖∅𝑘 ; 𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒 , 𝜈𝑟𝑖𝑠𝑘𝑙(𝑥𝑟(𝑡)) = 0 ;
where 𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧 and 𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧 are scalar that must be specified. 𝜈𝑟𝑖𝑟𝑘𝑖𝑧 are functions that specified by the method
intended to approximate membership functions. Finally, in order to show the sub-FOUs in ℎ̃𝑖𝑙𝑗(𝑥𝑖(𝑡)) we have:
ℎ̃𝑖𝑙𝑗(𝑥𝑖(𝑡)) = �̃�𝑖𝑙(𝑥𝑖(𝑡))�̃�𝑖𝑗(𝑥𝑖(𝑡))
=∑𝜉𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) [𝛾𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡))ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) + 𝛾𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡))ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡))]
𝜏+1
𝑧=1
(8)
where for the membership function ℎ̃𝑖𝑙𝑗(𝑥𝑖(𝑡)) with 𝑖, 𝑗, 𝑙 at any one time, among 𝜏 + 1 sub-FOU is only once
𝜉𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) = 1 and the remainder are zero. 𝛾𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) and 𝛾𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) are two functions that have the following
properties:
0 ≤ 𝛾𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) ≤ 𝛾𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) ≤ 1, 𝛾𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) + 𝛾𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) = 1, ∀𝑙, 𝑗, 𝑧
III. Main Result
In this section, we will obtain the stability of the closed-loop large-scale system using the type-2 Takagi-Sugeno
model. In [11], the authors introduced a new performance index, referred to extended dissipativity performance index
that holds 𝐻∞, 𝐿2-𝐿∞, passive, and dissipativity performance indexes. This performance indexes describe in definition
1 in the appendix. Therefore, the primary purpose of this section is to design the type-2 Takagi-Sugeno fuzzy state-
feedback controller for the large-scale system such that the closed-loop system is asymptotically stable with the 𝐻∞,
𝐿2-𝐿∞, passive, and dissipativity performance indexes such that:
1- The closed-loop system with 𝜔(𝑡) = 0 is asymptotically stable.
2- The closed-loop system holds extended dissipativity performance index.
Theorem1. For given matrices 𝜙, 𝜓1 , 𝜓2 , and 𝜓3 satisfying in assumption 1 in the appendix, the system in (5) is
asymptotically stable and satisfies the extended dissipativity performance indexes, if there exist matrices 𝑋𝑖 = 𝑋𝑖𝑇 >
0 , 𝐾𝑖 = 𝐾𝑖𝑇 > 0, 𝑀𝑖 = 𝑀𝑖
𝑇 ∈ 𝑹𝑛×𝑛 , 𝑁𝑖𝑗 ∈ 𝑹𝑚×𝑛 ,𝑊𝑖𝑙𝑗𝑧 = 𝑊𝑖𝑙𝑗𝑧
𝑇 ∈ 𝑹𝑛×𝑛 , (𝑖 = 1,2,… ,𝑁; 𝑙 = 1,2,… , 𝑝; 𝑗 =
1,2,… , 𝑐; 𝑧 = 1,2,… , 𝜏 + 1)such that the following LMIs hold:
𝑊𝑖𝑙𝑗𝑧 > 0 ∀𝑖, 𝑗, 𝑙, 𝑧 (9)
Ω𝑖𝑙𝑗 +𝑊𝑖𝑙𝑗𝑧 +𝑀𝑖 > 0 ∀𝑖, 𝑗, 𝑙, 𝑧 (10)

∑∑(𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧Ω𝑖𝑙𝑗 − (𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧 − 𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧)𝑊𝑖𝑙𝑗𝑧 + 𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧𝑀𝑖) − 𝑀𝑖
𝑐
𝑗=1
𝑝
𝑙=1
< 0 ∀𝑖1, 𝑖2, … , 𝑖𝑛 , 𝑘, 𝑖, 𝑧 (11)
Θ2𝑖 = [−𝐾𝑖 �̃�𝑖𝑙
𝑇𝜙𝑖𝑇
∗ −𝐼] < 0
(12)
Θ1𝑖 = [−𝑋𝑖 𝑋𝑖∗ 𝐾𝑖 − 2𝐼
] < 0 (13)
where
Ω̃𝑖𝑙𝑗 = [Ω̃1𝑖𝑙𝑗 Ω̃2𝑖𝑙
∗ Ω̃3𝑖𝑙], Ω̃1𝑖𝑙𝑗 = 𝑯𝒆(𝐴𝑖𝑙𝑋𝑖 +𝐵𝑖𝑙𝑁𝑖𝑗) + 𝜏0
−1(𝑁 − 1) [∑ (𝑋𝑖�̃�𝑘𝑖𝑇 �̃�𝑘𝑖𝑋𝑖)
𝑁𝑘=1𝑘≠𝑖
] + 𝜏𝑖 − �̃�𝑖𝑙𝑇𝜓1𝑖�̃�𝑖𝑙
Ω̃2𝑖𝑙 = −𝐷2𝑖𝑙𝑇 𝜓1𝑖𝐷2𝑖𝑙 − 𝐻𝑒(𝐷2𝑖𝑙𝜓2𝑖) − 𝜓3𝑖, Ω̃3𝑖𝑙 = 𝐷1𝑖𝑙 − �̃�𝑖𝑙
𝑇𝜓1𝑖�̃�𝑖𝑙 − �̃�𝑖𝑙𝜓2𝑖
for all 𝑖, 𝑙, 𝑗; and the feedback gain define as 𝐺𝑖𝑗 = 𝑁𝑖𝑗𝑋𝑖−1 for all 𝑖, 𝑗. Remember that 𝑯𝒆(𝐴) = 𝐴 + 𝐴𝑇. Also
�̃�𝑘𝑖𝑇 define as �̃�𝑘𝑖
𝑇 ≥ ‖∑ ∑ ℎ̃𝑖𝑙𝑗(𝑥𝑖(𝑡))�̅�𝑖𝑘𝑙𝑐𝑗=1
𝑝𝑙=1 ‖.
Proof. Consider the quadratic Lyapunov function as follows:
𝑉(𝑡) = ∑ 𝑥𝑖𝑇(𝑡)𝑃𝑖𝑥𝑖(𝑡)
𝑁𝑖=1 , 0 < 𝑃𝑖 = 𝑃𝑖
𝑇 ∈ 𝑹𝑛×𝑛 , ∀𝑖 (14)
The main objective is to develop a condition guaranteeing that 𝑉(𝑡) > 0and �̇�(𝑡) < 0 for all 𝑥𝑖(𝑡) ≠ 0, the type-2
fuzzy large-scale control system is guaranteed to be asymptotically stable, implying that 𝑥𝑖(𝑡) → 0 as 𝑡 → ∞. To
ensure that �̇�(𝑡) < 0 for all 𝑥𝑖(𝑡) ≠ 0 we have:
�̇�(𝑡) =∑{�̇�𝑖𝑇(𝑡)𝑃𝑖𝑥𝑖(𝑡) + 𝑥𝑖
𝑇(𝑡)𝑃𝑖�̇�𝑖(𝑡)}
𝑁
𝑖=1
=∑2{(∑∑ℎ̃𝑖𝑙𝑗{(𝐴𝑖𝑙 + 𝐵𝑖𝑙𝐺𝑖𝑗)𝑥𝑖(𝑡) + 𝐷1𝑖𝑙𝜔𝑖(𝑡)}
𝑐
𝑗=1
𝑝
𝑙=1
)
𝑇
𝑃𝑖𝑥𝑖(𝑡)}
𝑁
𝑖=1
+∑2{∑∑ℎ̃𝑖𝑙𝑗 {∑�̅�𝑖𝑘𝑙𝑥𝑘(𝑡)
𝑁
𝑘=1𝑘≠𝑖
}
𝑐
𝑗=1
𝑝
𝑙=1
}𝑃𝑖𝑥𝑖(𝑡)
𝑁
𝑖=1
(15)
Same as [21] for interconnections terms by using Lemma1 in the appendix and noting that �̃�𝑖𝑘 ≥‖∑ ∑ ℎ̃𝑖𝑙𝑗(𝑥𝑖(𝑡))�̅�𝑖𝑘𝑙
𝑐𝑗=1
𝑝𝑙=1 ‖ we have
∑{[∑�̃�𝑖𝑘𝑥𝑘(𝑡)
𝑁
𝑘=1𝑘≠𝑖
]
𝑇
[∑�̃�𝑖𝑘𝑥𝑘(𝑡)
𝑁
𝑘=1𝑘≠𝑖
]}
𝑁
𝑖=1
≤∑{[∑�̃�𝑖𝑘𝑥𝑖(𝑡)
𝑁
𝑘=1𝑘≠𝑖
]
𝑇
[∑�̃�𝑖𝑘𝑥𝑖(𝑡)
𝑁
𝑘=1𝑘≠𝑖
]}
𝑁
𝑖=1
≤∑{(𝑁 − 1) [∑𝑥𝑖𝑇(𝑡)�̃�𝑘𝑖
𝑇 �̃�𝑘𝑖𝑥𝑖(𝑡)
𝑁
𝑘=1𝑘≠𝑖
]}
𝑁
𝑖=1
(16)
and by using Lemma2 in the appendix we have and by considering 0 < 𝜏0 < 𝜏𝑖𝑙𝑗we have

�̇�(𝑡)
≤∑2{(∑∑ℎ̃𝑖𝑙𝑗{(𝐴𝑖𝑙 + 𝐵𝑖𝑙𝐺𝑖𝑗)𝑥𝑖(𝑡) + 𝐷1𝑖𝑙𝜔𝑖(𝑡)}
𝑐
𝑗=1
𝑝
𝑙=1
)
𝑇
𝑃𝑖𝑥𝑖(𝑡)}
𝑁
𝑖=1
+∑{𝜏0−1(𝑁 − 1) [∑𝑥𝑖
𝑇(𝑡)�̃�𝑘𝑖𝑇 �̃�𝑘𝑖𝑥𝑖(𝑡)
𝑁
𝑘=1𝑘≠𝑖
]}
𝑁
𝑖=1
+∑(∑∑ℎ̃𝑖𝑙𝑗𝜏𝑖
𝑐
𝑗=1
𝑝
𝑙=1
(𝑥𝑖(𝑡)𝑇𝑃𝑖𝑃𝑖𝑥𝑖(𝑡)))
𝑁
𝑖=1
(17)
let 𝑋𝑖 = 𝑃𝑖−1, 𝑔𝑖(𝑡) = 𝑋𝑖
−1𝑥𝑖(𝑡) , 𝑁𝑖𝑗 = 𝐺𝑖𝑗𝑋𝑖, �̃�𝑖𝑙 = 𝐶𝑖𝑙𝑋𝑖, then we have
�̇�(𝑡)
≤∑
{
∑∑ℎ̃𝑖𝑙𝑗
(
𝑔𝑖𝑇(𝑡)(𝑋𝑖𝐴𝑖𝑙
𝑇 + 𝑁𝑖𝑗𝑇𝐵𝑖𝑙
𝑇 + 𝐴𝑖𝑙𝑋𝑖 +𝐵𝑖𝑙𝑁𝑖𝑗)𝑔𝑖(𝑡)
𝑐
𝑗=1
𝑝
𝑙=1
𝑁
𝑖=1
+ 𝜏0−1(𝑁 − 1) [∑𝑔𝑖
𝑇(𝑡)(𝑋𝑖�̃�𝑘𝑖𝑇 �̃�𝑘𝑖𝑋𝑖)𝑔𝑖(𝑡)
𝑁
𝑘=1𝑘≠𝑖
] + 𝜏𝑖(𝑔𝑖𝑇(𝑡)𝑔𝑖(𝑡))
)
}
(18)
𝑧𝑖(𝑡) =∑∑ℎ̃𝑖𝑙𝑗{�̃�𝑖𝑙𝑔𝑖(𝑡) + 𝐷2𝑖𝑙𝜔𝑖(𝑡)}
𝒄
𝒋=𝟏
𝒑
𝒍=𝟏
(19)
now by consider the following performance index we have
�̇�(𝑡) − 𝐽(𝑡) ≤∑𝜁𝑖𝑇 {∑∑ℎ̃𝑖𝑙𝑗Ω̃𝑖𝑙𝑗
𝑐
𝑗=1
𝑝
𝑙=1
}𝜁𝑖
𝑁
𝑖=1
(20)
𝐽(𝑡) =∑(𝑧𝑖𝑇𝜓1𝑖𝑧𝑖 + 2𝑧𝑖
𝑇𝜓2𝑖𝜔𝑖(𝑡) + 𝜔𝑖𝑇(𝑡)𝜓3𝑖𝜔𝑖(𝑡))
𝑁
𝑖=1
=∑(∑∑ℎ̃𝑖𝑙𝑗{�̃�𝑖𝑙𝑔𝑖(𝑡) + 𝐷2𝑖𝑙𝜔𝑖(𝑡)}𝑇
𝒄
𝒋=𝟏
𝒑
𝒍=𝟏
𝜓1𝑖{�̃�𝑖𝑙𝑔𝑖(𝑡) + 𝐷2𝑖𝑙𝜔𝑖(𝑡)}
𝑁
𝑖=1
+ 2{�̃�𝑖𝑙𝑔𝑖(𝑡) + 𝐷2𝑖𝑙𝜔𝑖(𝑡)}𝑇𝜓2𝑖𝜔𝑖(𝑡) + 𝜔𝑖
𝑇(𝑡)𝜓3𝑖𝜔𝑖(𝑡) (21)
where
𝜁𝑖(𝑡) = [𝑔𝑖(𝑡)𝜔𝑖(𝑡)
], Ω̃𝑖𝑙𝑗 = [Ω̃1𝑖𝑙𝑗 Ω̃2𝑖𝑙
∗ Ω̃3𝑖𝑙], Ω̃1𝑖𝑙𝑗 = 𝑯𝒆(𝐴𝑖𝑙𝑋𝑖 + 𝐵𝑖𝑙𝑁𝑖𝑗) + 𝜏0
−1(𝑁 − 1) [∑ (𝑋𝑖�̃�𝑘𝑖𝑇 �̃�𝑘𝑖𝑋𝑖)
𝑁𝑘=1𝑘≠𝑖
] + 𝜏𝑖 −
�̃�𝑖𝑙𝑇𝜓1𝑖�̃�𝑖𝑙, Ω̃2𝑖𝑙 = −𝐷2𝑖𝑙
𝑇 𝜓1𝑖𝐷2𝑖𝑙 −𝐻𝑒(𝐷2𝑖𝑙𝜓2𝑖) − 𝜓3𝑖, Ω̃3𝑖𝑙 = 𝐷1𝑖𝑙 − �̃�𝑖𝑙𝑇𝜓1𝑖�̃�𝑖𝑙 − �̃�𝑖𝑙𝜓2𝑖.
by using Schur complement we have
Ω𝑖𝑙𝑗 = [Ω11𝑖𝑙𝑗 Ω12𝑖𝑙 Ω13𝑖𝑙∗ Ω22𝑖𝑙 Ω23𝑖𝑙∗ ∗ −I
], Ω11𝑖𝑙𝑗 = 𝑯𝒆(𝐴𝑖𝑙𝑋𝑖 +𝐵𝑖𝑙𝑁𝑖𝑗) + 𝜏0−1(𝑁 − 1) [∑ (𝑋𝑖�̃�𝑘𝑖
𝑇 �̃�𝑘𝑖𝑋𝑖)𝑁𝑘=1𝑘≠𝑖
] + 𝜏𝑖, Ω12𝑖𝑙 =
𝐷1𝑖𝑙 − �̃�𝑖𝑙𝜓2𝑖, Ω13𝑖𝑙 = �̃�𝑖𝑙𝑇𝜓1𝑖
𝑇 , Ω22𝑖𝑙 = −𝐻𝑒(𝐷2𝑖𝑙𝜓2𝑖) − 𝜓3𝑖, Ω23𝑖𝑙 = 𝐷2𝑖𝑙𝑇 𝜓1𝑖
𝑇 .
if we can prove ∑ ∑ ℎ̃𝑖𝑙𝑗Ω𝑖𝑙𝑗𝑟𝑗=1
𝑟𝑙=1 < 0 then we have:

�̇�(𝑡) − 𝐽(𝑡) ≤∑𝜁𝑖𝑇 {∑∑ℎ̃𝑖𝑙𝑗Ω̃𝑖𝑙𝑗
𝑐
𝑗=1
𝑝
𝑙=1
}𝜁𝑖
𝑁
𝑖=1
< 0 (22)
now by using (8) considering the information of the sub-FOUs is brought to the stability analysis with the introduction
of some slack matrices through the following inequalities using the S-procedure:
let 𝑀𝑖 = 𝑀𝑖𝑇is an arbitrary matrix with appropriate dimensions. Then
{∑∑∑𝜉𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) [(𝛾𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡))ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) + 𝛾𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡))ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡))) − 1]𝑀𝑖
𝜏+1
𝑧=1
𝑐
𝑗=1
𝑝
𝑙=1
} = 0 (23)
also, consider 0 ≤ 𝑊𝑖𝑙𝑗𝑧 =𝑊𝑖𝑙𝑗𝑧𝑇
−∑∑(1− 𝛾𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)))
𝑐
𝑗=1
𝑝
𝑙=1
(ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) − ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)))𝑊𝑖𝑙𝑗𝑧 ≥ 0 (24)
by using (23) and (24) for ∑ ∑ ℎ̃𝑖𝑙𝑗Ω𝑖𝑙𝑗𝑟𝑗=1
𝑟𝑙=1 < 0 we have
∑{∑∑∑(𝜉𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) [𝛾𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡))ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) + (1 − 𝛾𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)))ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡))])
𝜏+1
𝑧=1
Ω𝑖𝑙𝑗
𝑐
𝑗=1
𝑝
𝑙=1
}
𝑁
𝑖=1
−∑∑∑∑𝜉𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡))
𝜏+1
𝑧=1
(1 − 𝛾𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)))
𝑐
𝑗=1
𝑝
𝑙=1
(ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) − ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)))𝑊𝑖𝑙𝑗𝑧
𝑁
𝑖=1
+∑{∑∑∑𝜉𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) [(𝛾𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡))ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) + (1 − 𝛾𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)))ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)))
𝜏+1
𝑧=1
𝑐
𝑗=1
𝑝
𝑙=1
𝑁
𝑖=1
− 1]𝑀𝑖}
=∑{[∑∑∑𝜉𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) (ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡))Ω𝑖𝑙𝑗 − (ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) − ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)))𝑊𝑖𝑙𝑗𝑧
𝜏+1
𝑧=1
𝑐
𝑗=1
𝑝
𝑙=1
𝑁
𝑖=1
+ ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡))𝑀𝑖)− 𝑀𝑖]}
+∑∑∑∑𝜉𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡))
𝜏+1
𝑧=1
𝑐
𝑗=1
𝑝
𝑙=1
𝑁
𝑖=1
𝛾𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) (ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) − ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡))) (Ω𝑖𝑙𝑗 +𝑊𝑖𝑙𝑗𝑧 +𝑀𝑖) < 0 (25)
also, the following equation must be checked
[∑∑∑𝜉𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) (ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡))Ω𝑖𝑙𝑗 − (ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) − ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)))𝑊𝑖𝑙𝑗𝑧 + ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡))𝑀𝑖)
𝜏+1
𝑧=1
𝑐
𝑗=1
𝑝
𝑙=1
−𝑀𝑖] < 0 ∀𝑖 (26)
and Ω̃𝑖𝑙𝑗 +𝑊𝑖𝑙𝑗𝑧 +𝑀𝑖 > 0 for all 𝑖, 𝑗, 𝑙, 𝑧 due to (ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) − ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡))) ≤ 0. Recalling that only one
𝜉𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) = 1 for each fixed value of 𝑖, 𝑙, 𝑗 at any time instant such that ∑ 𝜉𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡))𝜏+1𝑧=1 = 1, the first set of
inequality is satisfied by

[∑∑(ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡))Ω𝑖𝑙𝑗 − (ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) − ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)))𝑊𝑖𝑙𝑗𝑧 + ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡))𝑀𝑖) −𝑀𝑖
𝑐
𝑗=1
𝑝
𝑙=1
]
< 0 ∀𝑖, 𝑙, 𝑗, 𝑧 (27)
Expressing ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) and ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡))with (7) and recalling that
∑ ∑ …∑ ∏ 𝜈𝑟𝑖𝑟𝑘𝑖𝑧(𝑥𝑟(𝑡))𝑛𝑟=1
2𝑖𝑛=1
2𝑖1=1
𝑞𝑘=1 = 1, for all z and 𝜈𝑟𝑖𝑟𝑘𝑖𝑧 ≥ 0 for all 𝑟, 𝑖𝑟 , 𝑘, 𝑖 𝑎𝑛𝑑 𝑧 the first set of
inequalities will be satisfied if the following inequalities hold
[∑∑ …∑∏𝜈𝑟𝑖𝑟𝑘𝑧(𝑥𝑟(𝑡))
𝑛
𝑟=1
2
𝑖𝑛=1
2
𝑖1=1
𝑞
𝑘=1
∑∑(𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧Ω𝑖𝑙𝑗 − (𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧 − 𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧)𝑊𝑖𝑙𝑗𝑧
𝑐
𝑗=1
𝑝
𝑙=1
+ 𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧𝑀𝑖) −𝑀𝑖] < 0 ∀𝑖1, 𝑖2, … , 𝑖𝑛 , 𝑘, 𝑖, 𝑧 (28)
consequently (27) can be guaranteed by
∑∑(𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧Ω𝑖𝑙𝑗 − (𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧 − 𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧)𝑊𝑖𝑙𝑗𝑧 + 𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧𝑀𝑖) − 𝑀𝑖
𝑐
𝑗=1
𝑝
𝑙=1
< 0 ∀𝑖1, 𝑖2, … , 𝑖𝑛 , 𝑘, 𝑖, 𝑧 (29)
therefore, there is always a sufficiently small scalar 𝑐 > 0 such that Ω̃𝑖𝑙𝑗 ≤ −𝑐𝐼. This means that
�̇�(𝑡) − 𝐽(𝑡) ≤ −𝑐 |∑𝜁𝑖
𝑁
𝑖=1
|
2
(30)
thus 𝐽(𝑡) ≥ �̇�(t) hold for any 𝑡 ≥ 0, which means
∫ 𝐽(𝑠)𝑡
0
𝑑𝑠 ≥ 𝑉(𝑥(𝑡)) − 𝑉(𝑥(0)) (31)
then by considering 𝜌 = −𝑉(𝑥(0))in (31) we have:
∫ 𝐽(𝑠)𝑡
0
𝑑𝑠 ≥ 𝑉(𝑥(𝑡)) + 𝜌, ∀𝑡 ≥ 0 (32)
According to Definition 1 in the appendix, if we want to design a controller with a robust 𝐻∞ performance, then we
must set the 𝜌 value to zero. For substitution 𝑉(𝑥(𝑡)) in (32) considering 𝐾𝑖 > 0 by Characteristic (𝐾𝑖 − 𝐼)𝐾𝑖−1(𝐾𝑖 −
𝐼) ≥ 0 where −𝐾𝑖−1 ≤ 𝐾𝑖 − 2𝐼 then we have:
Θ1𝑖 = [−𝑋𝑖 𝑋𝑖∗ 𝐾𝑖 − 2𝐼
] < 0 (33)
Finally 𝑃𝑖 > 𝐾𝑖 and (14) proved if :
𝑉(𝑥(𝑡)) =∑𝑥𝑖𝑇(𝑡)𝑃𝑖𝑥𝑖(𝑡)
𝑁
𝑖=1
≥∑𝑥𝑖𝑇(𝑡)𝐾𝑖𝑥𝑖(𝑡)
𝑁
𝑖=1
≥ 0 (34)
Also
𝑉(𝑥(𝑡)) =∑𝑥𝑖𝑇(𝑡)𝑃𝑖𝑥𝑖(𝑡)
𝑁
𝑖=1
≥∑𝑥𝑖𝑇(𝑡)𝐾𝑖𝑥𝑖(𝑡)
𝑁
𝑖=1
≥ 0 (35)
According to Definition 1, we need to prove that the following inequality holds for any matrices ϕ𝑖 , 𝜓1𝑖 ,𝜓2𝑖𝑎𝑛𝑑 𝜓3𝑖 satisfying assumption 1 in the appendix:
∫ 𝐽(𝑡)𝑡
0
𝑑𝑡 − 𝑧𝑇(𝑡)𝜙𝑧(𝑡) ≥ 𝜌 (36)

To this end, we consider the two cases of ‖𝜙‖ = 0 and ‖𝜙‖ ≠ 0, respectively. Firstly, we consider the case
when‖𝜙‖ = 0. Also in this case by considering 𝜓1 = −𝐼 , 𝜓2 = 0 , 𝜓3 = 𝛾2𝐼 and 𝜌 = 0 the 𝐻∞ performance
index will be hold.
∫ 𝐽(𝑠)𝑡
0
𝑑𝑠 =∑𝑥𝑖𝑇(𝑡)𝐾𝑖𝑥𝑖(𝑡)
𝑁
𝑖=1
+ 𝜌 ≥ 𝜌, ∀𝑡 ≥ 0 (37)
By using (37) and considering 𝑧𝑇(𝑡)𝜙𝑧(𝑡) ≡ 0 the (36) hold. Secondly, we consider the case of ‖𝜙‖ ≠ 0. In this case,
it is required under Assumption1 in the appendix that ‖𝜓1‖ + ‖𝜓2‖ = 0 and ‖𝐷2𝑖𝑙‖ = 0, which implies that 𝜓1 =0, 𝜓2 = 0 𝑎𝑛𝑑 𝜓3 > 0. Then:
𝐽(𝑠) =∑𝜔𝑖𝑇(𝑠)𝜓3𝑖𝜔𝑖
𝑇(𝑠)
𝑁
𝑖=1
≥ 0
now by considering �̃�𝑖𝑙𝑇𝜙𝑖�̃�𝑖𝑙 ≤ 𝐾𝑖 due to
Θ2𝑖 = [−𝐾𝑖 �̃�𝑖𝑙
𝑇𝜙𝑖𝑇
∗ −𝐼] < 0 (38)
and ‖𝐷2𝑖𝑙‖ = 0 satisfy in assumption1 for any 𝑡 ≥ 0, the following inequalities hold
∫ 𝐽(𝑠)𝑡
0
𝑑𝑠 − 𝑧𝑇(𝑡)𝜙𝑧(𝑡)
≥ ∫ 𝐽(𝑠)𝑡
0
𝑑𝑠 −∑(∑∑ℎ̃𝑖𝑙𝑗{𝐶𝑖𝑙𝑥𝑖(𝑡) + 𝐷2𝑖𝑙𝜔𝑖(𝑡)}𝑻
𝒄
𝒋=𝟏
𝒑
𝒍=𝟏
𝜙𝑖{𝐶𝑖𝑙𝑥𝑖(𝑡) + 𝐷2𝑖𝑙𝜔𝑖(𝑡)}
𝑁
𝑖=1
= ∫ 𝐽(𝑠)𝑡
0
𝑑𝑠 −∑(∑∑ℎ̃𝑖𝑙𝑗
𝒄
𝒋=𝟏
𝒑
𝒍=𝟏
(𝑔𝑖𝑇(𝑡)�̃�𝑖𝑙
𝑇𝜙𝑖�̃�𝑖𝑙𝑔𝑖(𝑡))
𝑁
𝑖=1
≥ ∫ 𝐽(𝑠)𝑡
0
𝑑𝑠 −∑(∑∑ℎ̃𝑖𝑙𝑗
𝒄
𝒋=𝟏
𝒑
𝒍=𝟏
(𝑥𝑖𝑇(𝑡)𝐾𝑖𝑥𝑖(𝑡))
𝑁
𝑖=1
≥ 𝜌 (39)
Finally by ω(𝑡) ≡ 0 we have:
�̇�(𝑡) ≤ 𝑧𝑇(𝑡)(∑∑∑ℎ̃𝑖𝑙𝑗
𝒄
𝒋=𝟏
𝒑
𝒍=𝟏
(𝜓1𝑖𝑙)
𝑁
𝑖=1
)𝑧(𝑡) − 𝑐 |∑𝜁𝑖
𝑁
𝑖=1
|
2
(40)
According to assumption1 in the appendix 𝜓1𝑖𝑙 < 0 for any 𝑖, 𝑙, then we have
�̇�(𝑡) ≤ −𝑐 |∑𝜁𝑖
𝑁
𝑖=1
|
2
(41)
thus the closed-loop system asymptotically stable by ω(𝑡) ≡ 0. This completes the proof.
Remark1: It can be seen from (8) that if more sub-FOUs are considered the more information about the FOU is
contained in the local LMFs and UMFs. Thus, using the information of membership functions into the stability
condition is resulting in a more relaxed stability analysis result.
Remark2: From (28), the advantage of using the type-2 fuzzy system in the form of (5) can be seen that local LMFs
and UMFs determine the stability condition.
Remark3: By expressing ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) and ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) in the form of (7), they are characterized by the constant
scalers𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧 and 𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧. Also, noting that the cross terms ∏ 𝜈𝑟𝑖𝑟𝑘𝑧(𝑥𝑟(𝑡))𝑛𝑟=1 are independent of 𝑖 and 𝑙.
By these favorable properties we need only to check (28) at some discrete points (𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧 and 𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧) instead
of every single point of the local LMFs and UMFs.
Remark4: Under the imperfect premise matching, the type-2 fuzzy controller can choose the premise membership
functions and the number of rules different from the type-2 fuzzy model freely.
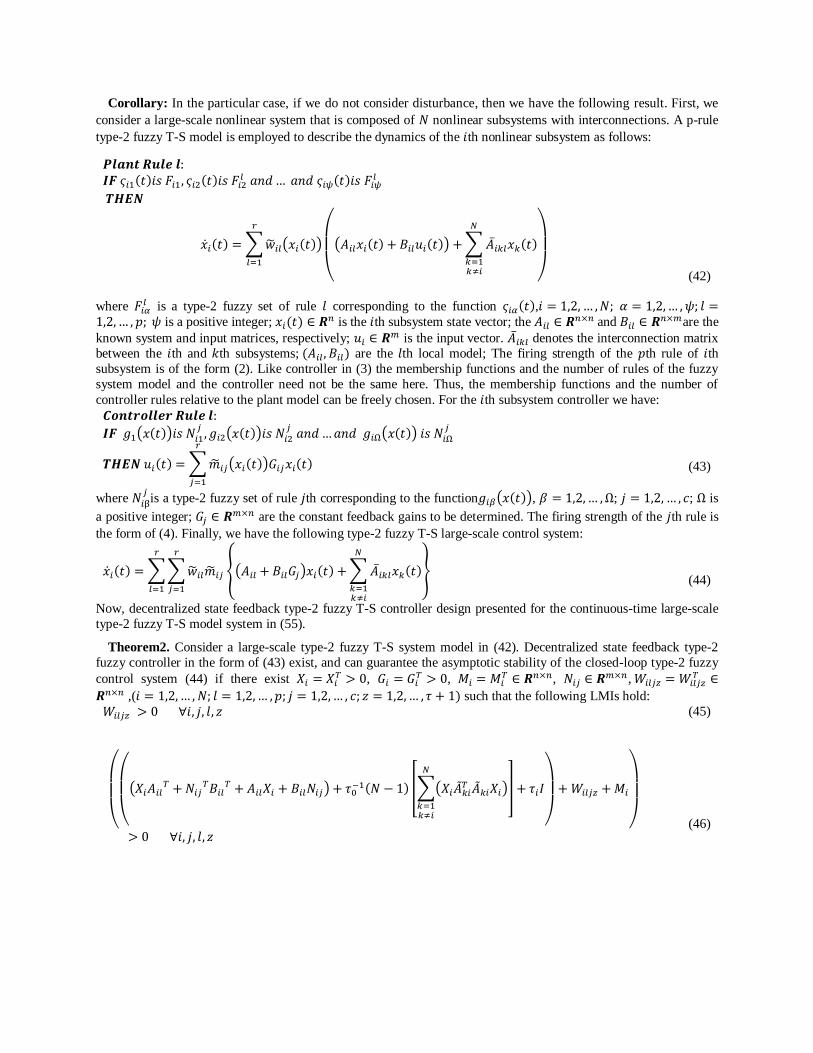
Corollary: In the particular case, if we do not consider disturbance, then we have the following result. First, we
consider a large-scale nonlinear system that is composed of 𝑁 nonlinear subsystems with interconnections. A p-rule
type-2 fuzzy T-S model is employed to describe the dynamics of the 𝑖th nonlinear subsystem as follows:
𝑷𝒍𝒂𝒏𝒕 𝑹𝒖𝒍𝒆 𝒍: 𝑰𝑭 𝜍𝑖1(𝑡)𝑖𝑠 𝐹𝑖1, 𝜍𝑖2(𝑡)𝑖𝑠 𝐹𝑖2
𝑙 𝑎𝑛𝑑… 𝑎𝑛𝑑 𝜍𝑖𝜓(𝑡)𝑖𝑠 𝐹𝑖𝜓𝑙
𝑻𝑯𝑬𝑵
�̇�𝑖(𝑡) =∑�̃�𝑖𝑙(𝑥𝑖(𝑡))
(
(𝐴𝑖𝑙𝑥𝑖(𝑡) + 𝐵𝑖𝑙𝑢𝑖(𝑡)) +∑ �̅�𝑖𝑘𝑙𝑥𝑘(𝑡)
𝑁
𝑘=1𝑘≠𝑖
)
𝑟
𝑙=1
(42)
where 𝐹𝑖𝛼𝑙 is a type-2 fuzzy set of rule 𝑙 corresponding to the function 𝜍𝑖𝛼(𝑡),𝑖 = 1,2, … ,𝑁; 𝛼 = 1,2,… , 𝜓; 𝑙 =
1,2,… , 𝑝; 𝜓 is a positive integer; 𝑥𝑖(𝑡) ∈ 𝑹𝑛 is the 𝑖th subsystem state vector; the 𝐴𝑖𝑙 ∈ 𝑹
𝑛×𝑛 and 𝐵𝑖𝑙 ∈ 𝑹𝑛×𝑚are the
known system and input matrices, respectively; 𝑢𝑖 ∈ 𝑹𝑚 is the input vector. �̅�𝑖𝑘𝑙 denotes the interconnection matrix
between the 𝑖th and 𝑘th subsystems; (𝐴𝑖𝑙 , 𝐵𝑖𝑙) are the 𝑙th local model; The firing strength of the 𝑝th rule of 𝑖th
subsystem is of the form (2). Like controller in (3) the membership functions and the number of rules of the fuzzy
system model and the controller need not be the same here. Thus, the membership functions and the number of
controller rules relative to the plant model can be freely chosen. For the 𝑖th subsystem controller we have:
𝑪𝒐𝒏𝒕𝒓𝒐𝒍𝒍𝒆𝒓 𝑹𝒖𝒍𝒆 𝒍:
𝑰𝑭 𝑔1(𝑥(𝑡))𝑖𝑠 𝑁𝑖1𝑗, 𝑔𝑖2(𝑥(𝑡))𝑖𝑠 𝑁𝑖2
𝑗 𝑎𝑛𝑑…𝑎𝑛𝑑 𝑔𝑖Ω(𝑥(𝑡)) 𝑖𝑠 𝑁𝑖Ω
𝑗
𝑻𝑯𝑬𝑵 𝑢𝑖(𝑡) =∑�̃�𝑖𝑗(𝑥𝑖(𝑡))𝐺𝑖𝑗𝑥𝑖(𝑡)
𝑟
𝑗=1
(43)
where 𝑁𝑖β𝑗
is a type-2 fuzzy set of rule 𝑗th corresponding to the function𝑔𝑖𝛽(𝑥(𝑡)), 𝛽 = 1,2,… ,Ω; 𝑗 = 1,2, … , 𝑐; Ω is
a positive integer; 𝐺𝑗 ∈ 𝑹𝑚×𝑛 are the constant feedback gains to be determined. The firing strength of the 𝑗th rule is
the form of (4). Finally, we have the following type-2 fuzzy T-S large-scale control system:
�̇�𝑖(𝑡) =∑∑�̃�𝑖𝑙�̃�𝑖𝑗 {(𝐴𝑖𝑙 +𝐵𝑖𝑙𝐺𝑗)𝑥𝑖(𝑡) +∑ �̅�𝑖𝑘𝑙𝑥𝑘(𝑡)
𝑁
𝑘=1𝑘≠𝑖
}
𝑟
𝑗=1
𝑟
𝑙=1
(44)
Now, decentralized state feedback type-2 fuzzy T-S controller design presented for the continuous-time large-scale
type-2 fuzzy T-S model system in (55).
Theorem2. Consider a large-scale type-2 fuzzy T-S system model in (42). Decentralized state feedback type-2
fuzzy controller in the form of (43) exist, and can guarantee the asymptotic stability of the closed-loop type-2 fuzzy
control system (44) if there exist 𝑋𝑖 = 𝑋𝑖𝑇 > 0, 𝐺𝑖 = 𝐺𝑖
𝑇 > 0, 𝑀𝑖 = 𝑀𝑖𝑇 ∈ 𝑹𝑛×𝑛, 𝑁𝑖𝑗 ∈ 𝑹
𝑚×𝑛 , 𝑊𝑖𝑙𝑗𝑧 = 𝑊𝑖𝑙𝑗𝑧𝑇 ∈
𝑹𝑛×𝑛 ,(𝑖 = 1,2,… , 𝑁; 𝑙 = 1,2,… , 𝑝; 𝑗 = 1,2,… , 𝑐; 𝑧 = 1,2,… , 𝜏 + 1) such that the following LMIs hold:
𝑊𝑖𝑙𝑗𝑧 > 0 ∀𝑖, 𝑗, 𝑙, 𝑧 (45)
(
(
(𝑋𝑖𝐴𝑖𝑙
𝑇 +𝑁𝑖𝑗𝑇𝐵𝑖𝑙
𝑇 +𝐴𝑖𝑙𝑋𝑖 + 𝐵𝑖𝑙𝑁𝑖𝑗) + 𝜏0−1(𝑁 − 1) [∑(𝑋𝑖�̃�𝑘𝑖
𝑇 �̃�𝑘𝑖𝑋𝑖)
𝑁
𝑘=1𝑘≠𝑖
] + 𝜏𝑖𝐼
)
+𝑊𝑖𝑙𝑗𝑧 +𝑀𝑖
)
> 0 ∀𝑖, 𝑗, 𝑙, 𝑧 (46)

∑∑
(
𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧
(
(𝑋𝑖𝐴𝑖𝑙
𝑇 +𝑁𝑖𝑗𝑇𝐵𝑖𝑙
𝑇 +𝐴𝑖𝑙𝑋𝑖 +𝐵𝑖𝑙𝑁𝑖𝑗) + 𝜏0−1(𝑁 − 1) [∑(𝑋𝑖�̃�𝑘𝑖
𝑇 �̃�𝑘𝑖𝑋𝑖)
𝑁
𝑘=1𝑘≠𝑖
]
𝑐
𝑗=1
𝑝
𝑙=1
+ 𝜏𝑖𝐼
)
− (𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧 − 𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧)𝑊𝑖𝑙𝑗𝑧 + 𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧𝑀𝑖
)
−𝑀𝑖 < 0 ∀𝑖1, 𝑖2, … , 𝑖𝑛 , 𝑘, 𝑖, 𝑧
(47)
where 𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧 and 𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧, 𝑖 = 1,2, … ,𝑁; 𝑙 = 1,2,… , 𝑝; 𝑗 = 1,2,… , 𝑐; 𝑧 = 1,2,… , 𝜏 + 1; 𝑖𝑛 = 1,2; 𝑘 =
1,2,… , 𝑞 are predefine constant scalers satisfying (7).
Proof. We consider the following quadratic Lyapunov function candidate to investigate the stability of the type-
2 fuzzy T-S large-scale control system
𝑉(𝑡) =∑𝑥𝑖𝑇(𝑡)𝑃𝑖𝑥𝑖(𝑡)
𝑁
𝑖=1
(48)
where 0 < 𝑃𝑖 = 𝑃𝑖𝑇 ∈ 𝑹𝑛×𝑛.
The main objective is to develop a condition guaranteeing that 𝑉(𝑡) > 0and �̇�(𝑡) < 0 for all 𝑥𝑖(𝑡) ≠ 0, the type-2
fuzzy T-S large-scale control system is guaranteed to be asymptotically stable, implying that 𝑥𝑖(𝑡) → 0 as 𝑡 → ∞. We
have:
�̇�(𝑡) =∑{�̇�𝑖𝑇(𝑡)𝑃𝑖𝑥𝑖(𝑡) + 𝑥𝑖
𝑇(𝑡)𝑃𝑖�̇�𝑖(𝑡)}
𝑁
𝑖=1
=∑
{
(∑∑�̃�𝑖𝑙�̃�𝑖𝑗 {(𝐴𝑖𝑙 +𝐵𝑖𝑙𝐺𝑖𝑗)𝑥𝑖(𝑡) +∑�̅�𝑖𝑘𝑥𝑘(𝑡)
𝑁
𝑘=1𝑘≠𝑖
}
𝑐
𝑗=1
𝑝
𝑙=1
)
𝑇
𝑃𝑖𝑥𝑖(𝑡)
𝑁
𝑖=1
+ 𝑥𝑖𝑇(𝑡)𝑃𝑖 (∑∑�̃�𝑖𝑙�̃�𝑖𝑗 {(𝐴𝑖𝑙 +𝐵𝑖𝑙𝐺𝑖𝑗)𝑥𝑖(𝑡) +∑ �̅�𝑖𝑘𝑥𝑘(𝑡)
𝑁
𝑘=1𝑘≠𝑖
}
𝑐
𝑗=1
𝑝
𝑙=1
)
}
(49)
Such as proof of Theorem1 for interconnection term by considering �̃�𝑘𝑖 ≥ ‖∑ ∑ ℎ̃𝑖𝑙𝑗�̅�𝑖𝑘𝑙𝑐𝑗=1
𝑝𝑙=1 ‖. we have:
�̇�(𝑡)
≤∑2{(∑∑ℎ̃𝑖𝑙𝑗{(𝐴𝑖𝑙 + 𝐵𝑖𝑙𝐺𝑖𝑗)𝑥𝑖(𝑡)}
𝑐
𝑗=1
𝑝
𝑙=1
)
𝑇
𝑃𝑖𝑥𝑖(𝑡)}
𝑁
𝑖=1
+∑{𝜏0−1(𝑁 − 1) [∑𝑥𝑖
𝑇(𝑡)�̃�𝑘𝑖𝑇 �̃�𝑘𝑖𝑥𝑖(𝑡)
𝑁
𝑘=1𝑘≠𝑖
]}
𝑁
𝑖=1
+∑(∑∑ℎ̃𝑖𝑙𝑗𝜏𝑖
𝑐
𝑗=1
𝑝
𝑙=1
(𝑥𝑖(𝑡)𝑇𝑃𝑖𝑃𝑖𝑥𝑖(𝑡)))
𝑁
𝑖=1
(50)
let 𝑋𝑖 = 𝑃𝑖−1, 𝜙𝑖(𝑡) = 𝑋𝑖
−1𝑥𝑖(𝑡) , 𝑁𝑖𝑗 = 𝐺𝑖𝑗𝑋𝑖, then we have
�̇�(t)
=∑
{
∑∑ℎ̃𝑖𝑙𝑗(𝑥𝑖(𝑡))
(
𝜙𝑖𝑇(𝑡)(𝑋𝑖𝐴𝑖𝑙
𝑇 + 𝑁𝑖𝑗𝑇𝐵𝑖𝑙
𝑇 +𝐴𝑖𝑙𝑋𝑖 +𝐵𝑖𝑙𝑁𝑖𝑗)𝜙𝑖(𝑡)
𝑐
𝑗=1
𝑝
𝑙=1
𝑁
𝑖=1
+ 𝜏0−1(𝑁 − 1) [∑𝜙𝑖
𝑇(𝑡)(𝑋𝑖�̃�𝑘𝑖𝑇 �̃�𝑘𝑖𝑋𝑖)𝜙𝑖(𝑡)
𝑁
𝑘=1𝑘≠𝑖
] + 𝜏𝑖(𝜙𝑖𝑇(𝑡)𝜙𝑖(𝑡))
)
}
(51)
we then express the type-2 membership function in the form of (8) and by considering the information of the sub-
FOUs brought to stability analysis with the introduction of some slack matrices as in (23) and (24). Then we have
�̇�(𝑡) < 0for all 𝑥𝑖(𝑡) ≠ 0 from:
[
∑∑∑𝜉𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡))
(
ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡))
(
(𝑋𝑖𝐴𝑖𝑙
𝑇 +𝑁𝑖𝑗𝑇𝐵𝑖𝑙
𝑇 +𝐴𝑖𝑙𝑋𝑖 +𝐵𝑖𝑙𝑁𝑖𝑗)
𝜏+1
𝑧=1
𝑐
𝑗=1
𝑝
𝑙=1
+ 𝜏0−1(𝑁 − 1) [∑(𝑋𝑖�̅�𝑘𝑖𝑙𝑗
𝑇�̅�𝑘𝑖𝑙𝑗𝑋𝑖)
𝑁
𝑘=1𝑘≠𝑖
] + 𝜏𝑖𝑙𝑗𝐼
)
− (ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) − ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)))𝑊𝑖𝑙𝑗𝑧
+ ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡))𝑀𝑖
)
−𝑀𝑖
]
< 0 ∀𝑖 (52)
(52) satisfied if the following inequality hold:
[
∑∑
(
ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡))
(
(𝑋𝑖𝐴𝑖𝑙
𝑇 +𝑁𝑖𝑗𝑇𝐵𝑖𝑙
𝑇 +𝐴𝑖𝑙𝑋𝑖 +𝐵𝑖𝑙𝑁𝑖𝑗) + 𝜏0−1(𝑁 − 1) [∑(𝑋𝑖�̅�𝑘𝑖𝑙𝑗
𝑇�̅�𝑘𝑖𝑙𝑗𝑋𝑖)
𝑁
𝑘=1𝑘≠𝑖
]
𝑐
𝑗=1
𝑝
𝑙=1
+ 𝜏𝑖𝑙𝑗𝐼
)
− (ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)) − ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡)))𝑊𝑖𝑙𝑗𝑧 + ℎ𝑖𝑙𝑗𝑧(𝑥𝑖(𝑡))𝑀𝑖
)
−𝑀𝑖
]
< 0 ∀𝑖, 𝑙, 𝑗, 𝑧
(53)
also, the second set of inequalities will be satisfied if the following inequalities hold:
∑∑
(
𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧
(
(𝑋𝑖𝐴𝑖𝑙
𝑇 + 𝑁𝑖𝑗𝑇𝐵𝑖𝑙
𝑇 + 𝐴𝑖𝑙𝑋𝑖 +𝐵𝑖𝑙𝑁𝑖𝑗) + 𝜏0−1(𝑁 − 1) [∑(𝑋𝑖�̅�𝑘𝑖𝑙𝑗
𝑇�̅�𝑘𝑖𝑙𝑗𝑋𝑖)
𝑁
𝑘=1𝑘≠𝑖
]
𝑐
𝑗=1
𝑝
𝑙=1
+ 𝜏𝑖𝑙𝑗𝐼
)
− (𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧 − 𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧)𝑊𝑖𝑙𝑗𝑧 + 𝛿𝑖𝑙𝑗𝑖1𝑖2…𝑖𝑛𝑘𝑧𝑀𝑖
)
−𝑀𝑖 < 0 ∀𝑖1, 𝑖2, … , 𝑖𝑛 , 𝑘, 𝑖, 𝑧
(54)
This completes the proof.
IV. Simulation
Consider a double-inverted pendulum system connected by a spring, the modified equations of the motion for the
interconnected pendulum are given by [21].

{
�̇�𝑖1 = 𝑥𝑖2
�̇�𝑖2 = −𝑘𝑟2
4𝐽𝑖𝑥𝑖1 +
𝑘𝑟2
4𝐽𝑖sin(𝑥𝑖1) 𝑥𝑖2 +
2
𝐽𝑖𝑥𝑖2 +
1
𝐽𝑖𝑢𝑖 +∑
𝑘𝑟2
8𝐽𝑖𝑥𝑗1
2
𝑗=1𝑗≠𝑖
, 𝑖 = {1,2} (55)
where 𝑥𝑖1denotes the angle of the 𝑖th pendulum from the vertical; 𝑥𝑖2is the angular velocity of the 𝑖th pendulum. The
objective here is to design robust decentralized state feedback 𝐻∞ fuzzy type-2 controller for the T-S fuzzy type-2
large-scale in the form of such that the resulting closed-loop system is asymptotically stable with an 𝐻∞ disturbance
attenuation level 𝛾. A concise framework on the decentralized state feedback control shown in Fig. 1. A concise
framework on the decentralized State Feedback control.
Fig. 1. A concise framework on the decentralized State Feedback control.
In this simulation, the masses of two pendulums chosen as 𝑚1 = 2𝑘𝑔 and 𝑚2 = 2.5𝑘𝑔; the moments of inertia are𝐽1 =2𝑘𝑔.𝑚2 and 𝐽2 = 2.5𝑘𝑔.𝑚
2; the constant of the connecting torsional spring is 𝑘 = 8𝑁/𝑚; the length of the pendulum
is 𝑟 = 1𝑚; the gravity constant is 𝑔 = 9.8𝑚/𝑠2 . We choose two local models, i.e., by linearizing the interconnected
pendulum around the origin and 𝑥𝑖1 = (±88°, 0), respectively, each pendulum can be represented by the following
IT2 T-S fuzzy model with two fuzzy rules.
𝑅𝑢𝑙𝑒 𝑙: 𝐼𝐹 𝐴𝑖𝑙𝑥𝑖(𝑡)𝑖𝑠 𝐹𝑖𝑙 𝑇𝐻𝐸𝑁
�̇�𝑖(𝑡) =∑∑�̃�𝑖𝑙�̃�𝑖𝑗 {(𝐴𝑖𝑙 +𝐵𝑖𝑙𝐺𝑖𝑗)𝑥𝑖(𝑡) + 𝐷1𝑖𝑙𝜔𝑖(𝑡) +∑ �̅�𝑖𝑘𝑥𝑘(𝑡)
𝑁
𝑘=1𝑘≠𝑖
}
𝑟
𝑗=1
𝑟
𝑙=1
𝑧𝑖(𝑡) =∑∑�̃�𝑖𝑙�̃�𝑖𝑗{𝐶𝑖𝑙𝑥𝑖(𝑡) + 𝐷2𝑖𝑙𝜔𝑖(𝑡)}
𝑐
𝑗=1
𝑝
𝑙=1
(56)
where
𝐴11 = [0 18.81 0
] , 𝐴12 = [0 15.38 0
] , �̅�12 = [00.25
] , 𝐵1𝑙 = [00.5] , 𝐷1𝑙 = [
00.5] , 𝐶1𝑙 = [1 1]
(57)
for the first subsystem, and
𝐴21 = [0 19.01 0
] , 𝐴22 = [0 15.58 0
] , �̅�21 = [00.20
] , 𝐵2𝑙 = [00.5] , 𝐷2𝑙 = [
00.5] , 𝐶2𝑙 = [1 1]
(58)
for the second subsystem.
The normalized type-2 membership functions shown in Fig. 2 where 𝑟𝑖 = 88°.

Fig. 2. IT2 Membership function in Example.
Given the initial conditions 𝑥1(0) = [1.2,0]𝑇 , 𝑥2(0) = [0.8,0]
𝑇 Fig. 3 shows that the double-inverted pendulum
system is not stable in the open-loop case.
Fig. 3 State responses for open-loop double-inverted pendulums system.
Taken the controller gains solved by Theorem1, Fig. 4 shows the state responses for the closed-loop large-scale system
by considering the external disturbances 𝜔1(𝑡) = 0.8𝑒−0.2𝑡 sin(0.2𝑡) and 𝜔2(𝑡) = 0.6𝑒
−0.2𝑡 sin(0.2𝑡)it can be seen
that minimum of 𝐻∞ disturbance attenuation level 𝛾𝑚𝑖𝑛 = 0.333 and the desired controller gains obtained in Table
1.
Fig. 4. State responses for closed-loop double-inverted pendulums system based on Theorem1.
0
0.2
0.4
0.6
0.8
1
1.2
- 8 8 0 8 8
DEG
REE
OF
MEM
BER
SHIP
X(TIME)
Rule1(LMF) Rule1(UMF) Rule2(LMF) Rule2(UMF)

Table 1
𝛾 [𝐺11 𝐺12 𝐺21 𝐺22] 0.333 [
−34.3381 −60.0235 −174.0191 −485.0611−16.2743 −31.7905 −93.5045 −268.4191
]
V. Conclusion
In this paper, the robust decentralized state feedback 𝐻∞ type-2 fuzzy controller design has been investigated for
continuous-time large-scale type-2 Takagi-Sugeno fuzzy systems. Through some linear matrix inequality techniques,
it has been shown that the state fuzzy controller gain can be calculated by solving a set of LMIs. Then the resulting
closed-loop fuzzy control system is asymptotically stable under extended dissipativity performance indexes.
Uncertainty in the model of large-scale systems is the result of the use of the type-1 fuzzy Takagi-Sugeno model.
Therefore, in this paper, the type-2 fuzzy model is used to cover modeling uncertainty for large scale systems. We
also stabilize the large-scale system by using the type-2 fuzzy state feedback controller model with imperfect premise
membership functions. The advantage of using membership function information in sustainability analysis is to reduce
the conservatism of the obtained conditions. Then, in order to reduce the effect of external perturbations on the large-
scale system, we applied the robustness control criterion name as extended dissipativity performance indexes to
stability analysis, which was able to guarantee the 𝐻∞ criterion, the 𝐿2 − 𝐿∞, passive, and dissipativity performances.
Finally, a numerical example of a double-inverted pendulum system has been concerned to verify the effectiveness of
the developed methods. The result of this simulation is to improve the control characteristics and make the conditions
relax, as well as more complete coverage of the uncertainties in the system. An interesting problem for future research
is to deal with the robust decentralized static output feedback 𝐻∞ type-2 fuzzy control design for large-scale systems.
VI. Appendix
Assumption 1. ([22]) Let 𝜙,𝜓1, 𝜓2and 𝜓3be matrices such that the following conditions hold:
(1) 𝜙 = 𝜙𝑇, 𝜓1 = 𝜓1𝑇 𝑎𝑛𝑑 𝜓3 = 𝜓3
𝑇;
(2) 𝜙 ≥ 0 and 𝜓1 ≤ 0;
(3) ‖𝐷2𝑖‖. ‖𝜙‖ = 0;
(4) (‖ 𝜓1‖ + ‖ 𝜓2‖). ‖𝜙‖ = 0;
(5) 𝐷2𝑖𝑇𝜓1𝐷2𝑖 + 𝐷2𝑖
𝑇𝜓2 +𝜓2𝑇𝐷2𝑖 + 𝜓3 > 0.
Definition 1. ([22]) For given matrices 𝜙, 𝜓1 , 𝜓2and 𝜓3 satisfying Assumption 1, system (5) is said to be extended
dissipative if there exists a scalar 𝜌 such that the following inequality holds for any 𝑡 > 0 and all 𝜔(𝑡) ∈ ℒ2[0,∞):
∫ 𝐽(𝑠)𝑡
0
𝑑𝑡 − 𝑧𝑇(𝑡)𝜙𝑧(𝑡) ≥ 𝜌, (59)
where 𝐽(𝑡) = 𝑧𝑇(𝑡)𝜓1𝑧(𝑡) + 2𝑧𝑇(𝑡)𝜓2𝑤(𝑡) + 𝑤
𝑇(𝑡)𝜓3𝑤(𝑡).
It can be seen from Definition 1 that the following performance indexes hold.
(1) Choosing 𝜙 = 0,𝜓1 = −𝑰,𝜓2 = 0,𝜓3 = 𝛾2𝑰 and 𝜌 = 0 the inequality (59) reduces to the 𝐻∞ performance
[13].
(2) Let 𝜙 = 𝑰,𝜓1 = 0,𝜓2 = 0, 𝜓3 = 𝛾2𝑰 and 𝜌 = 0 the inequality (59) becomes the 𝐿2 − 𝐿∞(energy-to-peak)
performance [14].
(3) If the dimension of output 𝑧(𝑡) is the same as that of disturbance 𝑤(𝑡), then the inequality (59) with 𝜙 =
0, 𝜓1 = 0,𝜓2 = 𝑰,𝜓3 = 𝛾𝑰 and 𝜌 = 0 becomes the passivity performance [15].
(4) Let 𝜙 = 0,𝜓1 = −𝜖𝑰,𝜓2 = 𝑰,𝜓3 = −𝜎𝑰 with 𝜖 > 0 and 𝜎 > 0, inequality (59) becomes the very-strict
passivity performance [16].
(5) Let 𝜙 = 0,𝜓1 = 𝑄,𝜓2 = 𝑆, 𝜓3 = 𝑅 − 𝛼𝑰 and 𝜌 = 0, inequality (59) reduces to the strict (𝑄, 𝑆, 𝑅)-
dissipativity [17].
Lemma 1. [23] (Jensen’s inequality) For any constant positive semidefinite symmetric matrix W ∈ 𝐑𝐧×𝐧, WT = W ≥
0 two positive integers d2 and d1satisfy d2 ≥ d1 ≥ 1 then the following inequality holds

(∑ 𝑥(𝑘)
𝑑2
𝑘=𝑑1
)
𝑇
𝑊(∑ 𝑥(𝑘)
𝑑2
𝑘=𝑑1
) ≤ �̅� ∑ 𝑥𝑇(𝑘)𝑊𝑥(𝑘)
𝑑2
𝑘=𝑑1
where �̅� = 𝑑2 − 𝑑1 + 1.
Lemma 2. for given matrices x̅ ∈ Rn, y̅ and scaler κ > 0 we have
2�̅�𝑇�̅� ≤ 𝜅−1�̅�𝑇�̅� + 𝜅�̅�𝑇�̅�
VII. Reference
1. Liu Y, Liu X, Jing Y, Wang H, Li X (2020) Annular domain finite-time connective control for large-scale systems with expanding construction. IEEE Transactions on Systems, Man, and Cybernetics: Systems 2. Cao L, Ren H, Li H, Lu R (2020) Event-Triggered Output-Feedback Control for Large-Scale Systems With Unknown Hysteresis. IEEE Transactions on Cybernetics 3. Mair J, Huang Z, Eyers D (2019) Manila: Using a densely populated pmc-space for power modelling within large-scale systems. Parallel Computing 82:37-56
4. Benmessahel B, Touahria M, Nouioua F, Gaber J, Lorenz P (2019) Decentralized prognosis of fuzzy discrete-event systems. Iranian Journal of Fuzzy Systems 16 (3):127-143 5. Wang W-J, Lin W-W (2005) Decentralized PDC for large-scale TS fuzzy systems. IEEE Transactions on Fuzzy systems 13 (6):779-786 6. Wei C, Luo J, Yin Z, Wei X, Yuan J (2018) Robust estimation‐free decentralized prescribed performance control of nonaffine
nonlinear large‐scale systems. International Journal of Robust and Nonlinear Control 28 (1):174-196
7. Zhai D, An L, Dong J, Zhang Q (2018) Decentralized adaptive fuzzy control for nonlinear large-scale systems with random packet dropouts, sensor delays and nonlinearities. Fuzzy Sets and Systems 344:90-107 8. Tanveer WH, Rezk H, Nassef A, Abdelkareem MA, Kolosz B, Karuppasamy K, Aslam J, Gilani SO (2020) Improving fuel cell performance via optimal parameters identification through fuzzy logic based-modeling and optimization. Energy 204:117976 9. Lian Z, He Y, Zhang C-K, Wu M (2019) Stability and stabilization of TS fuzzy systems with time-varying delays via delay-
product-type functional method. IEEE transactions on cybernetics 10. Chaouech L, Soltani M, Chaari A (2020) (1903-5049) Design of robust fuzzy Sliding-Mode control for a class of the Takagi-Sugeno uncertain fuzzy systems using scalar Sign function. Iranian Journal of Fuzzy Systems 11. Zamani I, Zarif MH (2011) On the continuous-time Takagi–Sugeno fuzzy systems stability analysis. Applied Soft Computing 11 (2):2102-2116 12. Bahrami V, Mansouri M, Teshnehlab M (2016) Designing robust model reference hybrid fuzzy controller based on LYAPUNOV for a class of nonlinear systems. Journal of Intelligent & Fuzzy Systems 31 (3):1545-1564 13. Wang G, Jia R, Song H, Liu J (2018) Stabilization of unknown nonlinear systems with TS fuzzy model and dynamic delay
partition. Journal of Intelligent & Fuzzy Systems (Preprint):1-12 14. Zhang H, Li C, Liao X (2006) CORRESPONDENCE-Stability Analysis and H (infinity) Controller Design of Fuzzy Large-Scale Systems Based on Piecewise Lyapunov Functions. IEEE Transactions on Systems Man and Cybernetics-Part B-Cybernetics 36 (3):685-698 15. Zhang H, Feng G (2008) Stability Analysis and $ H_ {\infty} $ Controller Design of Discrete-Time Fuzzy Large-Scale Systems Based on Piecewise Lyapunov Functions. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics) 38 (5):1390-1401 16. Tseng C-S, Chen B-S (2001) H/spl infin/decentralized fuzzy model reference tracking control design for nonlinear interconnected systems. IEEE Transactions on fuzzy systems 9 (6):795-809
17. Zamani I, Sadati N, Zarif MH (2011) On the stability issues for fuzzy large-scale systems. Fuzzy sets and systems 174 (1):31-49 18. Mir AS, Bhasin S, Senroy N (2019) Decentralized nonlinear adaptive optimal control scheme for enhancement of power system stability. IEEE Transactions on Power Systems 35 (2):1400-1410 19. Zamani I, Zarif MH (2010) An approach for stability analysis of TS fuzzy systems via piecewise quadratic stability. International Journal of Innovative Computing, Information and Control 6 (9):4041-4054 20. Zhang J, Chen W-H, Lu X (2020) Robust fuzzy stabilization of nonlinear time-delay systems subject to impulsive perturbations. Communications in Nonlinear Science and Numerical Simulation 80:104953
21. Zhong Z, Zhu Y, Yang T (2016) Robust decentralized static output-feedback control design for large-scale nonlinear systems using Takagi-Sugeno fuzzy models. IEEE Access 4:8250-8263 22. Zhang B, Zheng WX, Xu S (2013) Filtering of Markovian jump delay systems based on a new performance index. IEEE Transactions on Circuits and Systems I: Regular Papers 60 (5):1250-1263 23. Jiang X, Han Q-L, Yu X Stability criteria for linear discrete-time systems with interval-like time-varying delay. In: Proceedings of the 2005, American Control Conference, 2005., 2005. IEEE, pp 2817-2822