Embed Size (px)
Citation preview
75
Neautonomni navigacijski sustavi omogucuju odredivanje pozicije broda posredstvom mreže orbitalnih ili terestrickih stanica organiziranih u složene jedinice koje djeluju na komercijalnim osnovama i pod nadzorom su specijaliziranih uprava ili državnih administracija. Nakon drugog svjetskog rata razvijeno je više takvih koji su vremenom prestajali s radom (obalni radiofarovi, Consol, Loran A, Omega, Decca, NNSS, Transit) jer su ih zamjenjivali drugi zasnovani na novim tehnologijama. Trenutno su aktivna tri neautonomna navigacijska sustava: opci navigacijski satelitski sustav (GNS), navigacijski podsustav KOSPAS/SARSAT sustavu GMDSS (
) i impulsno fazni hiperbolicni navigacijski sustav Loran C.
Opci navigacijski satelitski sustav ( GNSS) sacinjavaju tri komponente: (GPS),
(?? ? ? ? ? ? - GLONASS) i . Jedna od njih (GPS) u punoj je primjeni, druga (GLONASS) u fazi je kompletiranja dok je treca (Galileo) u procesu nastajanja i ocekuje se pocetak njegove primjene tijekom 2008. godine, a u punoj funkciji bit ce 2016. godine.
Prvi pokusi sa satelitskim pozicioniranjem zapoceli su još 1959. nakon što je otkriven Dopplerov pomak frekvencije s prvih lansiranih satelita (npr. Sputnik I, 1957.). Prvi korišteni sustav NAVSAT ili NNSS ( ) poceo je s 4 satelita kojima je kasnije pridodan još jedan. Kasnije se NAVSAT razvio u navigacijski sustav TRANSIT koji se 1970. poceo koristiti i na trgovackim brodovima. Sustav NAVSTAR koji je kasnije postao poznat pod imenom GPS poceo se razvijati 1973. Do 1981. sustav je bio dopunjen s ukupno 9 satelita u tri orbitalne ravnine. Do kraja osamdesetih sustav je proširen instalitranjem ukupno 18 satelita u šest orbitalnih ravnina, a danas sustav radi s 24 aktivna satelita u šest orbitalnih ravnina.
Za odredivanje pozicije mogu se koristiti tri osnovna principa:pozicija mjerenjem udaljenosti satelita i brodapozicija mjerenjem razlike udaljenostipozicija mjerenjem visina i azimutapozicija mjerenjem Dopplerovog pomaka
Ako se pozicija odreduje mjerenjem udaljenosti satelita i broda stajnice su kružnice pozicija, a pozicija je presjecište tih stajnica. Udaljenost se može mjeriti na dva osnovna nacina: pasivni i aktivni nacin.
Pasivni nacin podrazumijeva postojanje dva vrlo precizna atomska kronometra, jedan na satelitu a drugi na brodu. Brod prima podatke od satelita (poziciju satelita i vrijeme kad je signal emitiran) koje usporeduje s vremenom prijema signala zabilježenom na vlastitom kronometru. Brod ne vraca informacije satelitu (zbog toga naziv ). Kronometri moraju biti precizno sinkronizirani (na tocnost od 0,2 mikrosekunde). Ovaj je pristup najcešci u praksi.
Aktivni nacin podrazumijeva povratak informacije s broda prema satelitu. Satelit šalje impuls brodu, a brod impuls vraca bez zadržavanja. Uda izracunava satelit (proporcionalna je polovici proteklog vremena od trenutka emitiranja do trenutka primanja signala na satelitu). Prednost ovog nacina je nepostojanje kronometra na brodu, ali nedostaci su da su i satelit i brodska stanica primopredajne stanice.
Aktivni neautonomni navigacijski sustavi
GNSS
Global Maritime Distress and Safety System
Global Navigation Satellite System -Global Positioning System ?? ? ???????
? ???????????? ? ??? ??????? ? ??? ?? ? Galileo
Navy Navigational Satellite System
pasivni nacin
••••
76
Ako se pozicija odreduje mjerenjem razlike udaljenosti radi se o hiperbolicnom satelitskom sustavu. Obalna stanica šalje inicijalne signale na dva satelita koji istovremeno emitiraju impuls. Brodska stanica prima impuls sa oba i iz razlike vremena prijema izracunava hiperbolu na kojoj se nalazi brod. Iz dvije hiperbole racunava se pozicija. Brodska stanica ne mora posjedovati kronometar.
Za odredivanje pozicije mjerenjem visine i azimuta satelita koriste se matematicki modeli astronomske navigacije. Brod mora raspolagati s radiosekstantom, racunalom i žirokompasom. Sustav nije razraden u primjenjivom obliku. Drugi je nacin da se pozicija odredi posredstvom jednog geostacionarnog satelita s dva medusobno okomita interferometra koji bi omogucili stalno odredivanje pozicije na tocnost od 1 M, ali zbog nužnosti poznavanja vrlo tocne udaljenosti satelita sustav je neprikladan za korištenje.
Pozicija mjerenjem Dopplerovog pomaka primjenjivala se u sustavu TRANSIT, a danas ga koristi navigacijski podsustav u sustavu namijenjenom spašavanju i traganju a koji djeluje u sklopu GMDSS-a ( ). To je sustav KOSPAS/SARSAT.
Zbog pomaka predajnika na satelitu (u sustavu TRANSIT) frekvencija koju prima brodska stanica veca je od emitirane ako se satelit približava, a manja od emitirane ako se sustav udaljava. Zbog pomaka prijemnika (u sustavu KOSPAS/SARSAT) nepomicni predajnik (plutaca EPIRB – ) emitira signal stabilne frekvencije (406 MHz), a prijemnik (satelit) prima višu frekvenciju ako se približava i nižu ako se udaljava. Integracijom frekvencija u više položaja satelita izracunava se pozicija.
Dopplerov efekt nastaje zbog medusobne promjene udaljenosti predajnika i prijemnika, a matematicki je odreden izrazom:
cV
1fVf
fff
c
v)-(Vfff-f
R1R
c
112
1D12
U izrazu f1 je emitirana frekvencija, f2 primljena frekvencija, fD Dopplerova frekvencija (V-v) = VR relativna brzina, c brzina rasprostiranja radiovalova.
Tocnost pozicije odredene satelitskim sustavima ovisi tocnosti položaja satelita, propagaciji radiovalova kroz slojeve atmosfere, o visini postavljene prijemne antene, elevaciji i azimutu satelita. Za praksu navigacije te su pogreške uglavnom zanemarive.
Sustav (u pocetku se zvao ) prvi je navigacijski satelitski sustav. Posljednji satelit sustava ugašen je u prosincu 2006. godine.
Sustav se temeljio na temelju mjerenja Dopplerova pomaka frekvencija koje je emitirao satelit dok se nalazio iznad horizonta opažaca.
U sustavu je radilo ukupno šest satelita koji su imali polarne putanje, zemaljska nadzorna stanica i brodski prijemnik. Prijemnik je automatski primao signale kad se satelit nalazio najmanje 15° iznad horizonta. Razlika frekvencije mjerila se u razmaku od dvije minute jedanput prije a drugi put nakon CPA ( -najbliže tocke mimoilaženja satelita i broda). Iz razlike frekvencija (Dopplerovog pomaka) prijemnik je izracunavao razliku udaljenosti izmedu satelita i broda i time hiperbolu kao stajnicu (hiperbola na površini Zemlje, inace je u prostoru to hiperboloid). U kasnijim mjerenjima odredivala se i druga hiperbola, a iz njihova presjecišta pozicija broda.
Global Maritime Distress and Safety System
Emergency Position Indicating Radio Beacon
Transit NavSat
Closed Poin of Aproach
±=±=
==
Transit
77
Procesor brodskog prijemnika izracunavao je pozicije automatski, uracunavajuci pri tom i pomake broda izmedu dva ili više mjerenja. Rezultati su memorirani za usporedbe s kasnijim mjerenjima.
Sustav je radio na 400 MHz. Prije isplovljenja prijemniku je bilo potrebno unijeti osnovne navigacijske elemente (kurs, brzinu, koordinate, vrijeme). Kasniji su uredaji bili povezani s brodskim senzorima tih vrijednosti. Na displeju su bili prikazivani elementi plovidbe ili su se oni mogli birati (uporabom tastature).
Uporaba GPS sustava od samog je pocetka pocela potiski i Transit i pocetkom dvadeset prvog stoljeca potpuno ga istisnula iz pomorske prakse.
Sustav je složen od tri elementa: satelita, korisnickih prijemnih stanica i stanica za upravljanje i nadzor.
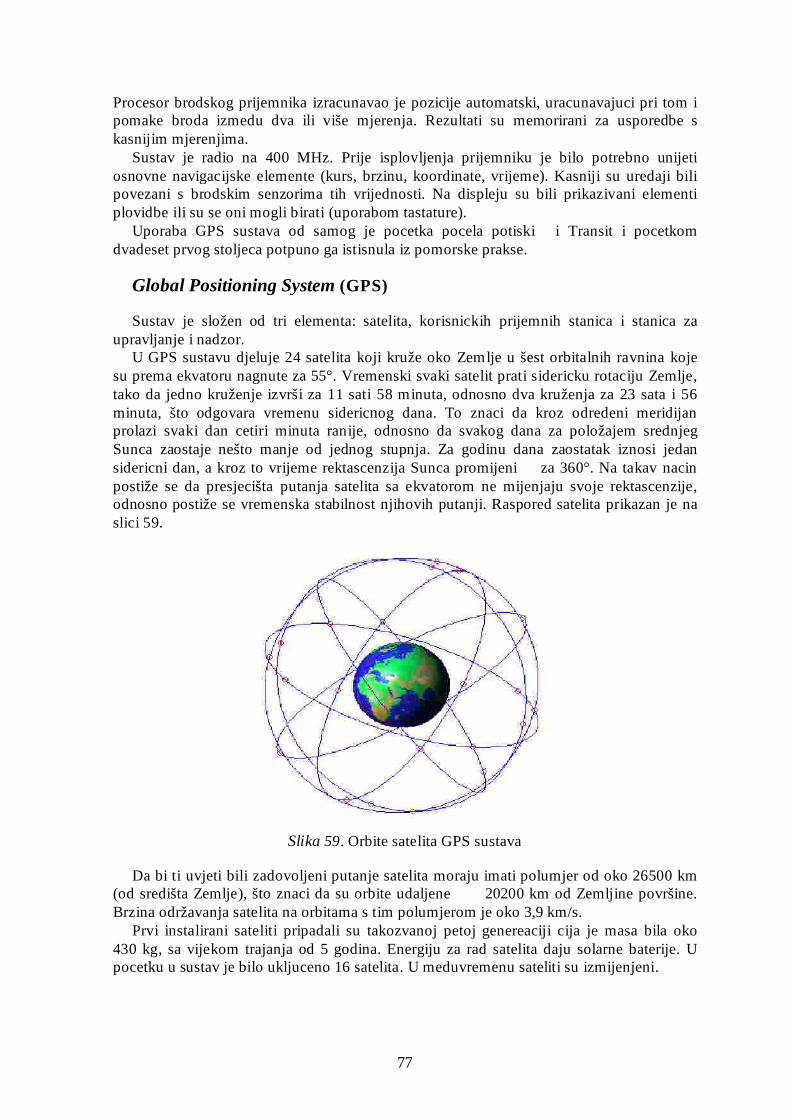
U GPS sustavu djeluje 24 satelita koji kruže oko Zemlje u šest orbitalnih ravnina koje su prema ekvatoru nagnute za 55°. Vremenski svaki satelit prati sidericku rotaciju Zemlje, tako da jedno kruženje izvrši za 11 sati 58 minuta, odnosno dva kruženja za 23 sata i 56 minuta, što odgovara vremenu sidericnog dana. To znaci da kroz odredeni meridijan prolazi svaki dan cetiri minuta ranije, odnosno da svakog dana za položajem srednjeg Sunca zaostaje nešto manje od jednog stupnja. Za godinu dana zaostatak iznosi jedansidericni dan, a kroz to vrijeme rektascenzija Sunca promijeni za 360°. Na takav nacin postiže se da presjecišta putanja satelita sa ekvatorom ne mijenjaju svoje rektascenzije, odnosno postiže se vremenska stabilnost njihovih putanji. Raspored satelita prikazan je na slici 59.
. Orbite satelita GPS sustava
Da bi ti uvjeti bili zadovoljeni putanje satelita moraju imati polumjer od oko 26500 km (od središta Zemlje), što znaci da su orbite udaljene 20200 km od Zemljine površine. Brzina održavanja satelita na orbitama s tim polumjerom je oko 3,9 km/s.
Prvi instalirani sateliti pripadali su takozvanoj petoj genereaciji cija je masa bila oko 430 kg, sa vijekom trajanja od 5 godina. Energiju za rad satelita daju solarne baterije. U pocetku u sustav je bilo ukljuceno 16 satelita. U meduvremenu sateliti su izmijenjeni.
Global Positioning System (GPS)
Slika 59
78
Sustav nadzire 5 zemaljskih kontrolnih stanica:Colorado Spring u SAD koji ima ulogu glavnog nadzornog centra (
),otok Kwajalein u Tihom oceanuotok Diego Garcia u Indijskom oceanuotoci Ascencion u Atlantskom oceanuHavaji u Tihom oceanu
Stanice Havaji, Ascencion, Diego Garcia i Kwajalien rade bez posada, šalju satelitima podatke o korekcijama orbita, korekciji vremena i ostalim podacima važnim za rad sustava. Podatke važne za navigaciju stanice ažuriraju tri puta dnevno na temelju uputa iz Colorado Springa.
Razvojem sustava funkciju glavnog nadzornog centra preuzela je zemaljska stanica u gradu Vanderbergu u SAD, a pomocne stanice postale su otok Guam i stanica na Aljasci.
U GPS sustavu pozicija se dobije ako se izmjere tri udaljenosti od tri satelita, a odredena je sa tri dimenzije: geografskom širinom, geografskom dužinom i nadmorskom visinom (za avione). Princip mjerenja udaljenosti je o vremena putovanja signala od satelita do prijemnika što podrazumijeva postojanje vrlo preciznih kronometara na satelitima i u prijemniku na brodu.
Tocnost zavisi o geometrijskom rasporedu satelita: kao i kod autonomnih navigacijskih sustava kut presjecišta stajnica je faktor tocnosti. U GPS sustavu taj se faktor zove koeficijent tocnosti HDOP ( ). Faktor je promjenjiv jer se stalno mijenja položaj satelita. Vrijednost HDOP koeficijenta može se vidjeti iz tablice.
Koeficijent Stupanj tocnosti
0 - 2 Visok stupanj tocnosti
3 - 5 Zadovoljavajuci stupanj tocnosti
5 - 7 Nizak stupanj tocnosti
8 - 10 Nedovoljan stupanj tocnosti
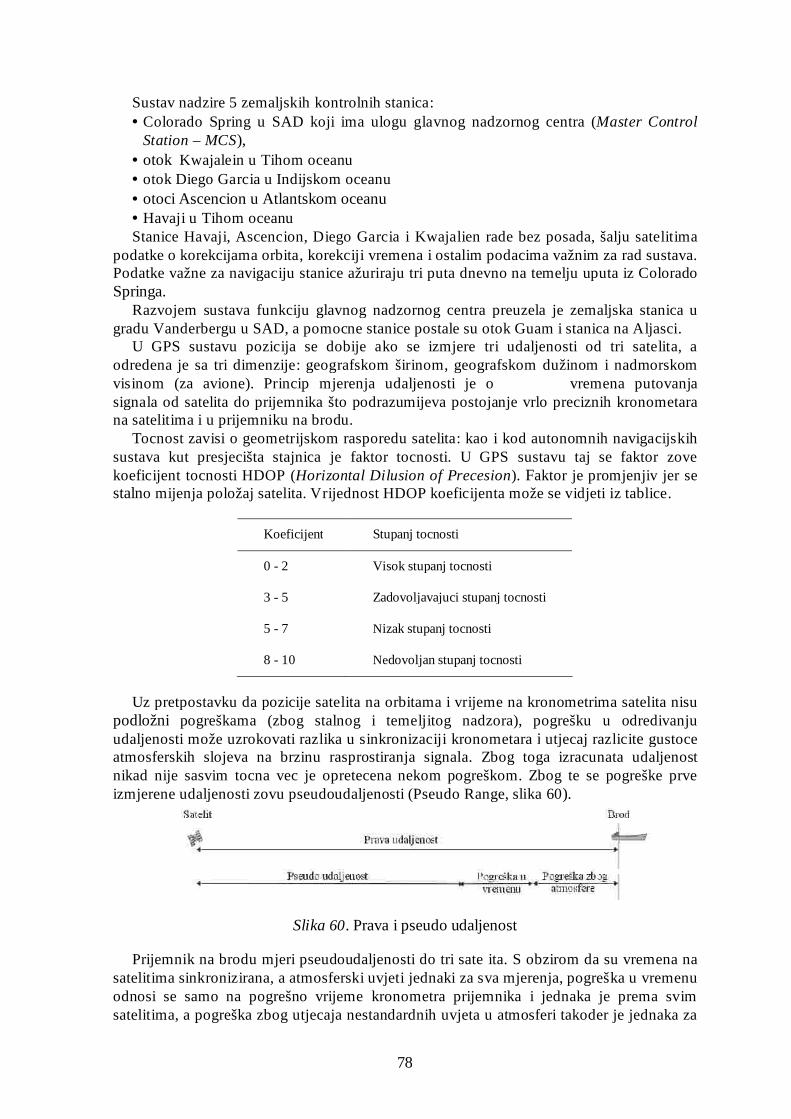
Uz pretpostavku da pozicije satelita na orbitama i vrijeme na kronometrima satelita nisu podložni pogreškama (zbog stalnog i temeljitog nadzora), pogrešku u odredivanju udaljenosti može uzrokovati razlika u sinkronizaciji kronometara i utjecaj razlicite gustoceatmosferskih slojeva na brzinu rasprostiranja signala. Zbog toga izracunata udaljenost nikad nije sasvim tocna vec je opretecena nekom pogreškom. Zbog te se pogreške prve izmjerene udaljenosti zovu pseudoudaljenosti (Pseudo Range, slika 60).
. Prava i pseudo udaljenost
Prijemnik na brodu mjeri pseudoudaljenosti do tri sate ita. S obzirom da su vremena na satelitima sinkronizirana, a atmosferski uvjeti jednaki za sva mjerenja, pogreška u vremenu odnosi se samo na pogrešno vrijeme kronometra prijemnika i jednaka je prema svim satelitima, a pogreška zbog utjecaja nestandardnih uvjeta u atmosferi takoder je jednaka za
•
••••
Master Control Station – MCS
Horizontal Dilusion of Precesion
Slika 60
79
sva mjerenja. Zbog toga te pogreške imaju karakter sustavne pogreške koja je jednaka prema svim satelitima i može se ispraviti, a izmjerene pseudoudaljenosti pretvoriti u prave.
Sustavna pogreška emitirane poruke može se sastojati od slijedecih elemenata:pogreška u efemeridama i pogreška u položaju satelita,pogreška atomskog sata u satelitu (ne nastaje iz tehnickih razloga vec nemogucnošcu sinkronizacije unutar sastava); popravak vremena atomskih satova svakodnevno se unosi u satelite više puta dnevno tako da je ova pogreška u praksi zanemariva,pogreška zgušnjavanja vremena javlja se u blizini površine Zemlje zbog velike zemljine mase (prema teoriji relativnosti),
Pogreške emitiranog signala u praksi su zanemarive.Sustavna pogreška prijemnika može se sastojati od slijedecih elemenata:
stanja atomskog kronometra u prijamniku,atmosfersko zakašnjenje zbog propagacije radiovala slojevima atmosfere, refrakcije, refleksije i smanjene brzine rasprostiranja,višestruki prijem istog signala (zbog mogucih refleksija).
Masa nove generacije GPS satelita je 430 kg (prvi instalirani sateliti imali su masu od cca 900 kg), a izvor energije su suncane baterije s površinom 7,25 m2 (slika 61).
. Satelit GPS sustava
Satelit obavlja slijedece operacije:prima i memorira informacijeobraduje primljene podatke,predaje informacije prijemnikuobavlja korekcije putanje na temelju uputa sa kontrolnih stanica na Zemlji.
Sateliti posjeduju vrlo tocne atomske kronometre s cetiti oscilatora, dva od cesija i dva od rubidija. Kronometri imaju stabilnost frekvencije reda 10-12 što znaci da su podložni pogrešci od jedne sekunde za 30.000 godina.
Antena je stabilizirana i stalno usmjerena prema Zemlji.Sateliti rade na 1575,42 MHz i 1227,6 MHz. Frekvencije su modulirane (kodirane) sa
dva koda: civilnim C/A kodom i vojnim P kodom. P kod koristi frekvencija 1227,6 MHz, a C/A kod koristi frekvencija 1575,42 MHz. P kod moduliran je osnovnom frekvencijom (fo)
••
•
••
•
••••
Sateliti
Slika 61
80
koja ima 10,23 MHz, a noseca se dobije šifrom. C/A kod moduliran je šifrom fo /10 što iznosi 1 MHz. Sateliti emitiraju poruke u trajanju od 30 sekundi, a poruka je složena od pet djelova kojima prethode dvije grupe slova po kojima prijemnik prepoznaje tip poruke. Prva slovcana grupa prenosi telemetrijske podatke (satelitske efemeride) a sastoji se od slova TLM ( ). Druga slovcana grupa HOW ( ) prenosi ostale potrebne podatke.
Prvi dio poruke sadrži podatke o vremenskoj uskladenos kronometara i podatak o vremenu emitiranja signala.Drugi i treci dio poruke sadrže efemeride (orbitalne podatke) odredenog satelita iionosfersku korekciju. Efemeride satelita u nacelu vrijede cetiri do šest sati, to je takozvano vrijeme „toplog“ traženja satelita (podaci o položaju satelita dovoljno su tocni da prijemnik može identificirati satelite). Ako su efemeride starije od šest sati prijemniku je potrebno duže vremena da identificira satelite i zapocne odredivati poziciju. To je takozvano „hladno“ traženje satelita, a prijemnik da bi radio sigurno i bez predugog traženja ne bi smio biti ugašen duže od šest sati. Cetvrti dio poruke je bilten za korisnika a primaju ga uredaji sa posebnim prijemnikom.Peti dio poruke sadrži almanah (godišnjak) sa efemeridskim podacima za sve satelite u sustavu.
S obzirom da su sateliti umjetna nebeska tijela njihov je položaj odreden efemeridama. To su koordinate objekta na nebeskoj sferi u cetiri koordinatna sustava, dva mjesna (sustav horizonta i mjesni ekvatorski sustav) i dva nebeska (nebeski sustav ekvatora i sustav ekliptike). Koordinate u koordinatnom sustavu horizonta su visina i azimut, koordinate u mjesnom sustavu ekvatora su deklinacija i satni kut, koordinate u nebeskom sustavu ekvatora su deklinacija i surektascenzija a koordinate u koordinatnom sustavu ekliptike su latituda i longituda.
Mjesni i nebeski sustavi definirani su vrstama prividnog kretanja tijela na nebeskoj sferi. Koordinate mjesnih koordinatnih sustava funkcija su rotacije Zemlje oko vlastite osi i cjelokupni ciklus promjena izvrše u 24 sata koliko traje sinodicka rotacija Zemlje. Koordinate nebeskih koordinatnih sustava ovisna su o prividnim kretanjima Sunca tijekom godine, odnosno o revolucijama planeta i cjelokupni ciklus promjena izvrše za onoliko vremena koliko traju njihove revolucije (na pr. Sunce 5,25 dana, Venere 224,7 dana, Mars 687 dana, Jupiter 11,9 godina). Buduci da su umjetni sateliti nebeska tijela u neposrednoj blizini Zemlje s orbitama koje traju 11 sati i 58 minuta, njihove se nebeske efemeride (deklinacija i surektascenzija) mijenjaju jednako brzo kao i dnevne (visina i azimut). Efemeride satelita sastavni su dio druge, trece i pete poruke koju sateliti emitiraju.
Ako se nebeska sfera zamisli kao kugla, na njoj su definirane glavne orjentacijske tocke, ravnine i kružnice:
nebeski polovi su tocke koje na nebeskoj sferi probija pravac zemaljske osovine produžene do nebeske sfere, nebeski ekvator je glavna kružnica na nebeskoj sferi koju tvori ravnina zemaljskog ekvatora produžena do nebeske sfere,zenit i nadir su tocke na nebeskoj sferi koje probija rtikalni pravac opažaca na Zemlji,nebeski horizont je ravnina okomita na nebeski vertika koja prolazi središtem nebeske sfere,ekliptika je ravnina po kojoj se tijekom godine prividno krece Sunce.
TeLeMetry HandOver Word
•
•
•
•
•
•
•
•
•
Izracunavanje efemerida

81
Pravac kojeg u prostoru tvori presjecište ravnina nebeskog ekvatora i ekliptike je pravac ekvinocija, a koji definira dvije tocke na nebeskoj sferi: proljetnu tocku (?) i jesenju tocku (O). Proljetna tocka je presjecište ekliptike i nebeskog ekvatora na uzlaznom dijelu sunceve putanje, odnosno to je tocka u kojoj se nalazi Sunce prvog dana proljeca. Jesenja tocka je presjecište ravina ekliptike i nebeskog ekvatora na silaznom dijelu sunceve putanje, odnosno to je tocka u kojoj se Sunce nalazi prvog dana jeseni (slika 62).
. Nebeske koordinate (efemeride) satelita
Na slici nebeski su polovi oznaceni sa PN (sjeverni nebeski pol) i PS (južni nebeski pol). Putanja satelita nagnuta je nad ravninu ekvatora za kut (e) koji iznosi 55°. Položaj proljetne
tocke oznacen je sa (?). Putanja satelita presjeca nebeski ekvator u tocki koja je za (ao) udaljena od položaja proljetne tocke. S obzirom da je nja satelita uskladena s vremenom trajanja tropskog dana (11 sati 58 minuta, odnosno za dva kruženja 23 sata 56 minuta što predstavlja vrijeme trajanja jednog tropskog dana) ta se udaljenost ne mijenja. Za odredeno vremensko razdoblje (? t) satelit je prevalio luk (? ? ) na slici (s obzirom d satelit izvrši puno kruženje za 11 sati 58 minuta za jedan sat ? ? iznosi 30,08°). Deklinacija za odredeni trenutak na slici je oznacena s (d), a promjena rektascenzije sa (? a). Iz slike se može izdvojiti pravokutni sferni trokut prikazan na slici 63.
. Pravokutni sferni trokut efemerida satelita
Elementi pravokutnog sfernog trokuta rješavaju se Neperovim pravilima. Iz Neperova kola na slici mogu se izracunati efemeride (d i ? a) kao funkcije prevaljenog puta satelita na orbiti ? ? (30,08°za jedan sat) i kuta nagiba orbite nad nebeski ekvator e (55°):
Slika 62
Slika 63
82
sin d = sin e sin ? ?
tg
tgsin
Iz slike 60 vidi se da je:
0
Izracunata vrijednost je rektascenzija, to jest luk nebeskog ekvatora od položaja proljetne tocke do položaja na kojem satna kružnica satelita presjeca nebeski ekvator, mjerena u retrogradnom smislu (prema istoku). S obzirom da se nauticke vrijednosti(kursevi, azimuti, satni kutovi) mijenjaju retrogradno, za izracunavanje položaja satelita u odnosu na opažaca koristi se vrijednost surektascenzije, to jest vrijednost koja od rektascenzije razlikuje za 360° (surektascenzija je 360° - a).
Mjesne koordinate satelita (visina v i azimut W) za opažaca ciji je položaj definiran geografskom širinom (f ) i geografskom dužinom (?) racuna se iz mjesnih koordinatnih sustava ekvatora i horizonta. Veza surektascenzije i mjesnog satnog kuta s (koordinata u mjesnom koordinatnom sustavu ekvatora) može se izracunati iz izraza:
)-(360)(Ss 0
U izrazu (s) predstavlja mjesni satni kut (mjesnu ekvatorsku koordinatu satelita), (S?) satni kut proljetne tocke u meridijanu Greenwich, (?) geografsku dužinu broda, a (360° - a ) surektascenziju. Horizontske koordinate visinu (v) i azimut (W) može se izracunati iz sfernog astronomskog trokuta kojeg na nebeskoj sferi tvore koordinatni sustav horizonta i mjesni koordinatni sustav ekvatora:
scoscoscossin sin sin v
vcoscos
sin vsin -sin W cos
Visina je koordinata koja oznacuje položaj satelita u u na horizont opažaca s koordinatama f i ?, a azimut kut izmedu sjeverne strane meridijana i smjera prema satelitu.Visina satelita iznad horizonta ponekad se naziva .
Prema tome za izracun položaja satelita nužne su dvije vrijednosti: surektascenzija tocke presjecišta putanje satelita s nebeskim ekvatorom od položaja proljetne tocke i vrijeme kad se satelit nalazi u toj tocki. Te podatke satelik šalje prijemniku kao efemeride.
Izmjerena udaljenost izmedu satelita i broda (D) odredena je izrazom:
) t-(tcD ep
Udaljenost je funkcija brzine rasprostiranja signala (c) i vremenske razlike od trenutka
kad je signal primljen na brodu (tp) i trenutka kad je bio emitiran sa satelita (ts). Vrijeme kad je signal primljen bilježi se na kronometru prijemnika, a vrijeme kad je signal emitiran šalje satelit prijemniku kao poruku. Buduci da se može pojaviti razlika u brzini rasprostiranja signala zbog atmosferskih uvjeta, a kronometar na brodu može biti opterecen pogreškom, izmjerena udaljenost je pseudoudaljenost (D) koja je sastavljena od nekesustavne pogreške (e) i prave udaljenosti (d):
edD
ε
δ=α∆
α∆+α=α
α+λ+= γ
δϕ+δϕ=
ϕ
ϕδ=
=
+=
elevacija
Izracunavanje udaljenosti

83
S obzirom da se mjere udaljenosti od tri satelita, te obzirom da se radi o sustavnoj pogreški koja je jednaka za svaku izmjerenu udaljenost, pseudo udaljenosti od satelita do
broda (D1, D2 i D3) sadrže prave udaljenosti i sustavnu pogrešku:
edD 11
edD 22
edD 33
Sustavna pogreška ista je za sva mjerenja iz razloga što su kronometri satelita stopostotno uskladeni pa se pogreška u mjerenju vremena rasprostiranja signala odnosi samo na stanje kronometra prijemnika, a ta je pogreška jednaka za sva tri mjerenja. Takoder i dio sustavne pogreške koji se odnosi na nestandardne uvjete atmosfere jednaka je za sva tri mjerenja jer su ona izvršena u jednakim atmosferskim uvjetima.
Položaji satelita u prostornom koordinatnom sustavu definirani su koordinatama po matematickim osima x, y i z. Položaj prvog satelita odreden je koordinatama x1, y1 i z1. Analogno, položaj drugog satelita definiran je koordinatama x2, y2 i z2, a položaj treceg satelita koordinatama x3, y3 i z3. Središte koordinatnog sustava je u središtu Zemlje.
U tom koordinatnom sustavu prijemnik ima koordinate x, y i z. Prave se udaljenosti mogu izracunati iz izraza:
23
23
2333
22
22
2222
21
21
2111
)z-(z)y-(y ) x-(x e-Dd
)z-(z)y-(y ) x-(x e-Dd
)z-(z)y-(y ) x-(x e-Dd
Buduci da se brod nalazi na površini Zemlje, udaljenost od središta koordinatnog sustava (središta Zemlje) do broda odgovarat ce zemljinu polumjeru (R):
222 zyxR
Poznavanjem tocnih dimenzija geoida (GPS koristi sustav WGS 84) mogu se izracunati geografske koordinate pozicije broda (f i ?).
Izracunavanjem i ucrtavanjem udaljenosti na površini Zemlje kao stajnice dobiju se tri kružnice cije presjecište predstavlja pravu poziciju broda. Kad ne bi postojala pogreška, sve bi se kružnice sjekle u istoj tocki. Ako to nije slucaj postoji sustavna pogreška koja je po predznaku i vrijednosti jednaka za svako mjerenje. narednom koraku ta se pogreška uracunava prema dijagramu toka na slici 64.
. Dijagram toka GPS pozicije
+=+=+=
++==
++==
++==
++=
Slika 64

84
Uracunavanjem sustavne pogreške odredivanje pozicije GPS-om postiže se visoku tocnost.
Sateliti emitiraju na istoj frekvenciji, a do interferencije ne dolazi zbog kodirane modulacije ( ). Miješanjem frekvencija postiže se efekt slican superheterodinskom s tom razlikom što je kod digitalnog oblika. Noseci val zapravo je dvaput moduliran i to na dvije bitno niže frekvencije osnovnog vala: najprije s P ili C/A kodom, a zatim s frekvencijom navigacijske poruke (Navigation Message) od 50 bps (bita na sekundu). Svrha P ili C/A koda je da GPS signal mogu koristiti samo prijemnici koji imaju isti kod. Taj kod kod emitiranja djeluje kao umjetno izazvana smetnja, pa se tako i zove ( ). Princip kodiranja i dekodiranja prikazan je na slici 65.
. Umjetno stvorena smetnja (PNC)
Druga modulacija sastoji se u tome da se ovi signali još pomaknu u fazi za odredeni fazni kut ( ). U prijemniku se sinkroniziranim pomakom PNC koda za odredeni fazni kut prepoznaju pojedini satelit prijemnik prima signal samo jednog satelita, a kad se obrade podaci tog satelita PNC se pomakne za vrijednost faznog kuta, tako da se izjednace faze sa narednim satelitom ciji ce signali biti primljeni ako je vidljiv u tom trenutku. Ako nema prijema kod se pomakne za slijedecu vrijednost faznogkuta. Svaki satelit ima vlastiti kod, a svaki prijemnik može mijenjati kodove i tako raditi sa svakim satelitom pojedinacno, iako cjelokupan sustav radi na istoj frekvenciji.
Prema tome za komunikaciju satelit – brod (za civilno korištenje) postoje:osnovni signal frekvencije 1575,42 MHzC/A kod s frekvencijom 1,024 Mbps (svake milisekunde ponavlja se 1024 bita),navigacijske poruke frekvencije 50 bps, dužine 1500 bita i s ponavljanjem (
) svakih 30 sekundi.Poruka se sastoji od pet blokova, svaki blok obraduje 6 sekundi, svih pet blokova za
30 sekundi, a za prijem svih poruka sa svih satelita potrebno je 12,5 minuta.
GPS prijemnik izraduje se u velikom broju oblika i velicina, od rucnih (u obliku rucnog sata, npr. Casio) do uredaja s višenamjenskim displejem. Najcešci brodski prijemnik sastoji se od LCD videozaslona, mikroprocesora, memorije i antene, najcešce vanjske. Atomski sat automatski se sinkronizira s kronometrom na satelitu, tako da se stalno na brodu raspolaže s vrlo tocnim vremenom (GPS je u potpunosti klasicne brodske
Elektronika GPS-a
Brodski prijemnik
Spread Spectrum Modulation – SSM
Pseudo Noise Code – PNC
Slika 65
Spread Spectrum Modulation
Repetiton Rate
•••
85
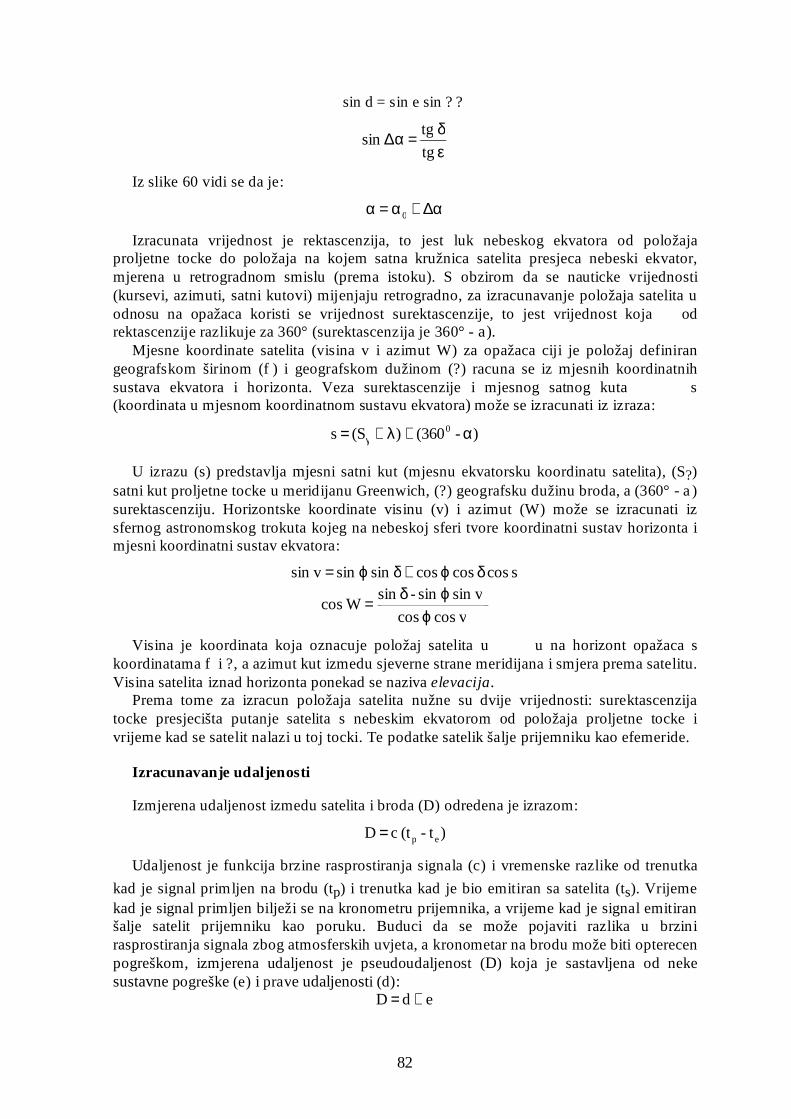
kronometre). Prijemnik omogucava i izracun brzine mjerenjem Dopplerova pomaka primljene frekvencije. Ceste marke su Furuno, Decca, Magelan, Sperry itd. Neki tipovi prikazani su na slikama 66 i 67.
. GPS prijemnik Casio u obliku rucnog sata i GPS prijemnik Furuno GP 32
. GPS prijemnik Furuno GP-7000 F i GPS prijemnik Garmin 3006 S
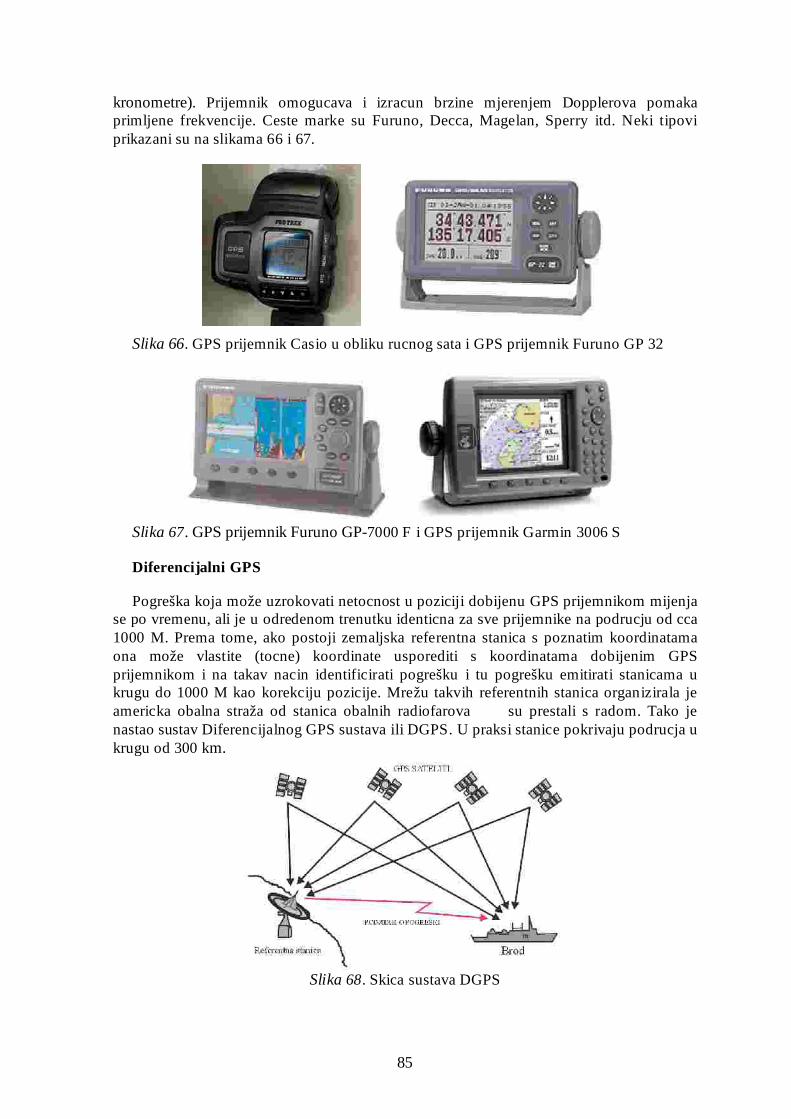
Pogreška koja može uzrokovati netocnost u poziciji dobijenu GPS prijemnikom mijenja se po vremenu, ali je u odredenom trenutku identicna za sve prijemnike na podrucju od cca 1000 M. Prema tome, ako postoji zemaljska referentna stanica s poznatim koordinatama ona može vlastite (tocne) koordinate usporediti s koordinatama dobijenim GPS prijemnikom i na takav nacin identificirati pogrešku i tu pogrešku emitirati stanicama u krugu do 1000 M kao korekciju pozicije. Mrežu takvih referentnih stanica organizirala je americka obalna straža od stanica obalnih radiofarova su prestali s radom. Tako je nastao sustav Diferencijalnog GPS sustava ili DGPS. U praksi stanice pokrivaju podrucja u krugu od 300 km.
. Skica sustava DGPS
Slika 66
Slika 67
Slika 68
Diferencijalni GPS
86
Sustav DGPS sacinjavaju referentne stanice na kopnu kojima su poznate vrlo tocne vlastite koordinate. DGPS stanica šalje korekcije ostalim mobilnim GPS stanicama u svom dometu (slika 68). Jednom primljena korekcija vrijedi za sva mjerenja do naredne promjene. Prijemnici moraju biti dopunjeni komponentama koji omogucavaju prijem korektivne vrijednosti.
S obzirom da su DGPS stanice nastale kao prenamjena su koji su prestali s radom (prije svega obalnih radiogoniometarskih stanica) koji su uglavnom radili na niskim frekvencijama, i sustav DGPS radi na niskim frekvencijama. Na primjer, prve stanice koje je organizirala Obalna straža Sjedinjenih Americkih Država a koje su pokrivale obale USA i Kanade radile su na frekvencijama izmedu 285 kHz i 325 kHz.
Sustav DGPS poceo se razvijeti od samih pocetaka rada GPS-a, a uzrok je bio sukob izmedu vojnih i civilnih organizacija u SAD o korištenju GPS-a. Vojne su organizacije ustrajale na namjernoj pogrešci od 100 metara (unošenjem namjerne pogreške u vremenu kronometra na satelitu u C/A modelu) da bi se onemogucila zloupotreba sustava u vojne svrhe drugih država, dok su civilne agencije iskazivale potrebu što tocnijeg pozicioniranja, posebno za neke specificne potrebe (istražne bušotine naftnih platformi, oceanografska i hidrografska istraživanja itd). Konacno DGPS je eksperimentalno zapoceo s radom 1996. na ogranicenom podrucju istocnih obala SAD i Kanade, a mreža stanica burno je ekspandirala i vec tijekom iste godine sustav je pokrivao sve atlantske i pacificke luke SAD i Kanal Saint Lawrence (u suradnji s Obalnom stražom Kanade). Sredinom prvog desetljeca dvadeset i prvog stoljeca Kanada je sustavom stanica pokrila sva obalna podrucja i podrucja Velikih Jezera, a na obalama SAD u sustavu DGPS bilo je 82 stanice, s planom da se taj broj poveca na 128 u narednih 15 godina.
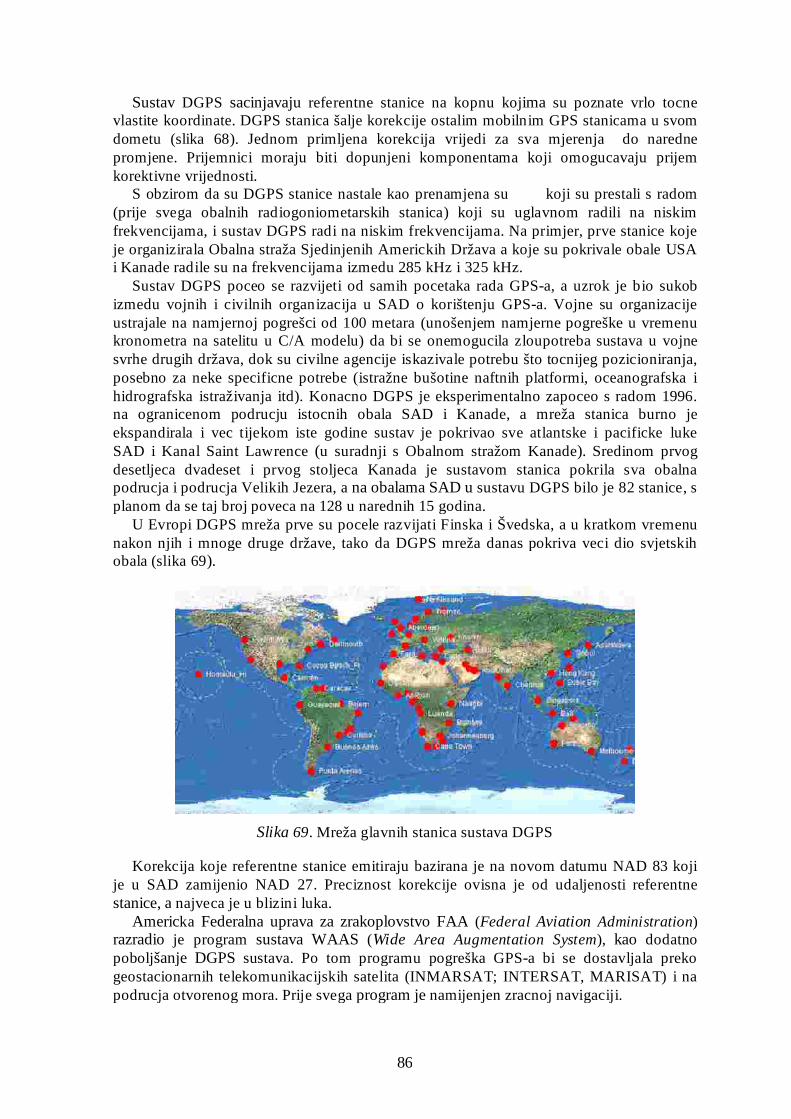
U Evropi DGPS mreža prve su pocele razvijati Finska i Švedska, a u kratkom vremenu nakon njih i mnoge druge države, tako da DGPS mreža danas pokriva veci dio svjetskih obala (slika 69).
. Mreža glavnih stanica sustava DGPS
Korekcija koje referentne stanice emitiraju bazirana je na novom datumu NAD 83 koji je u SAD zamijenio NAD 27. Preciznost korekcije ovisna je od udaljenosti referentne stanice, a najveca je u blizini luka.
Americka Federalna uprava za zrakoplovstvo FAA ( ) razradio je program sustava WAAS ( ), kao dodatnopoboljšanje DGPS sustava. Po tom programu pogreška GPS-a bi se dostavljala preko geostacionarnih telekomunikacijskih satelita (INMARSAT; INTERSAT, MARISAT) i na podrucja otvorenog mora. Prije svega program je namijenjen zracnoj navigaciji.
Slika 69
Federal Aviation AdministrationWide Area Augmentation System
87
Stanica DGPS-a pokriva podrucje do 200 M udaljenosti, a korektivna ijednost sustava vrijedi samo za podrucje koje pokriva i za vrijeme u kojem je emitirana. Tocnost opada s udaljenošcu broda od referentne stanice, a posebno vel ka pogreška može nastati ako brod i stanica ne primaju podatke s istih satelita.
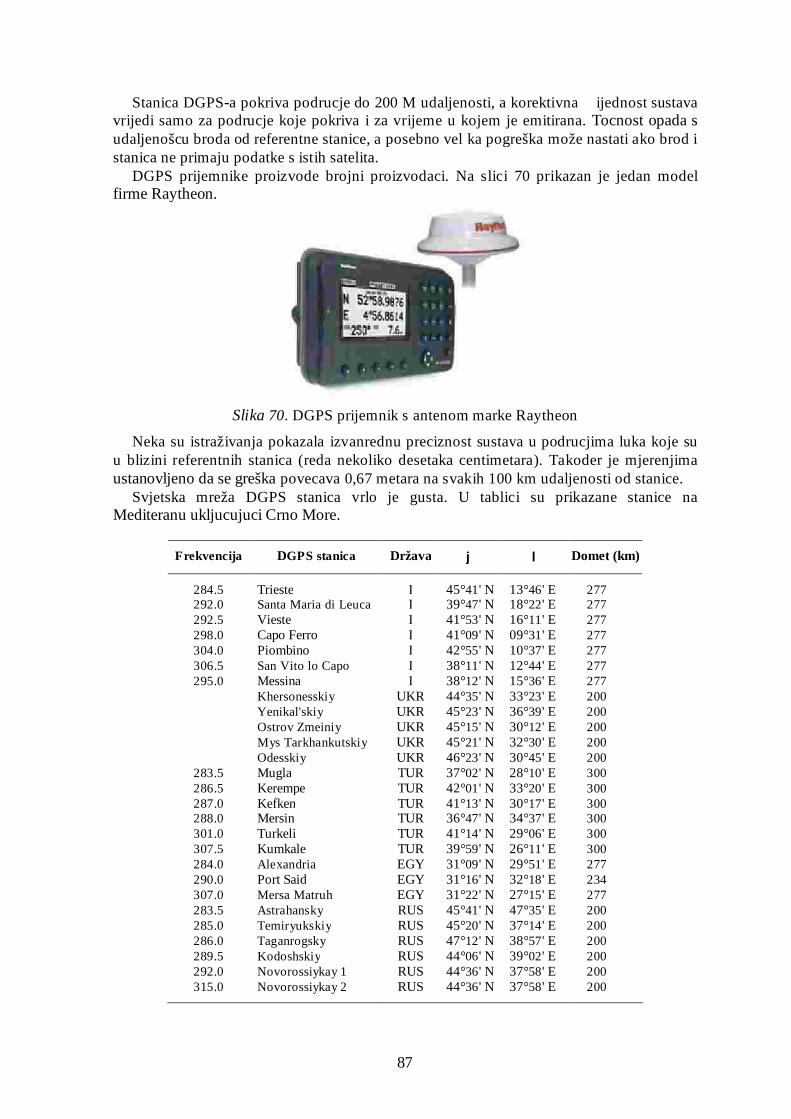
DGPS prijemnike proizvode brojni proizvodaci. Na slici 70 prikazan je jedan model firme Raytheon.
DGPS prijemnik s antenom marke Raytheon
Neka su istraživanja pokazala izvanrednu preciznost sustava u podrucjima luka koje su u blizini referentnih stanica (reda nekoliko desetaka centimetara). Takoder je mjerenjima ustanovljeno da se greška povecava 0,67 metara na svakih 100 km udaljenosti od stanice.
Svjetska mreža DGPS stanica vrlo je gusta. U tablici su prikazane stanice na Mediteranu ukljucujuci Crno More.
284.5 Trieste I 45°41' N 13°46' E 277292.0 Santa Maria di Leuca I 39°47' N 18°22' E 277292.5 Vieste I 41°53' N 16°11' E 277298.0 Capo Ferro I 41°09' N 09°31' E 277304.0 Piombino I 42°55' N 10°37' E 277306.5 San Vito lo Capo I 38°11' N 12°44' E 277295.0 Messina I 38°12' N 15°36' E 277
Khersonesskiy UKR 44°35' N 33°23' E 200Yenikal'skiy UKR 45°23' N 36°39' E 200Ostrov Zmeiniy UKR 45°15' N 30°12' E 200Mys Tarkhankutskiy UKR 45°21' N 32°30' E 200Odesskiy UKR 46°23' N 30°45' E 200
283.5 Mugla TUR 37°02' N 28°10' E 300286.5 Kerempe TUR 42°01' N 33°20' E 300287.0 Kefken TUR 41°13' N 30°17' E 300288.0 Mersin TUR 36°47' N 34°37' E 300301.0 Turkeli TUR 41°14' N 29°06' E 300307.5 Kumkale TUR 39°59' N 26°11' E 300284.0 Alexandria EGY 31°09' N 29°51' E 277290.0 Port Said EGY 31°16' N 32°18' E 234307.0 Mersa Matruh EGY 31°22' N 27°15' E 277283.5 Astrahansky RUS 45°41' N 47°35' E 200285.0 Temiryukskiy RUS 45°20' N 37°14' E 200286.0 Taganrogsky RUS 47°12' N 38°57' E 200289.5 Kodoshskiy RUS 44°06' N 39°02' E 200292.0 Novorossiykay 1 RUS 44°36' N 37°58' E 200315.0 Novorossiykay 2 RUS 44°36' N 37°58' E 200
Slika 70.
Frekvencija DGPS stanica Država Domet (km)j l
88
DGPS stanice, osim podatka o korekciji sustava emitiraju i druge korisne poruke. Posljedica uvodenja mreže DGPS bila je da su vojne organizacije 2000. godine odustale
od selektivnog pristupnog koda SA ( ) pri upotrebi GPS-a, pa se i na taj nacin tocnost sustava poboljšala.
Nakon instaliranja prvih satelita sustava GPS tadašnji Sovjetski Savez odgovorio je lansiranjem vlastitog navigacijskog sustava pod nazivom Opci Navigacijski Satelitski Sustav ( ?? ? ? ? ? ? ). Kao i GPS i GLONASS je sustav koji omogucava neogranicen broj korisnika kod odredivanja 3D položaja, neovisno o vremenskim uvjetima. Sredinom devedesetih razvijen je sustav primanja signala s oba sustava (GPS i GLONASS).
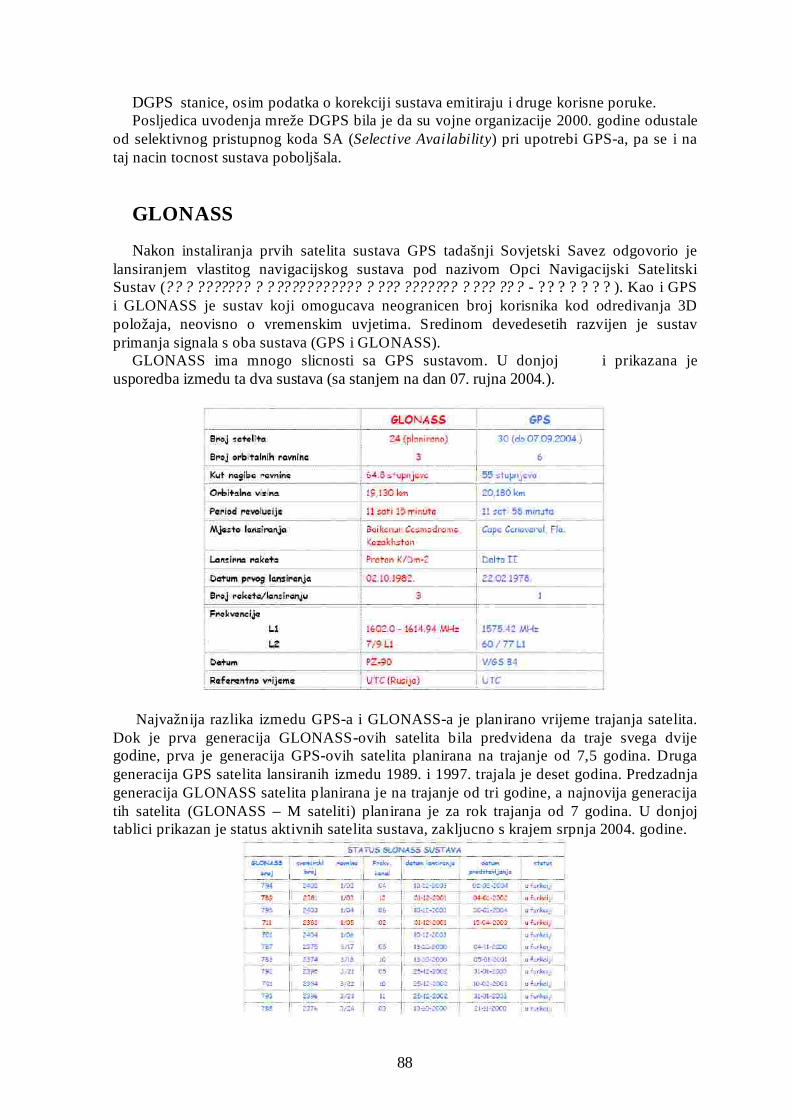
GLONASS ima mnogo slicnosti sa GPS sustavom. U donjoj i prikazana je usporedba izmedu ta dva sustava (sa stanjem na dan 07. rujna 2004.).
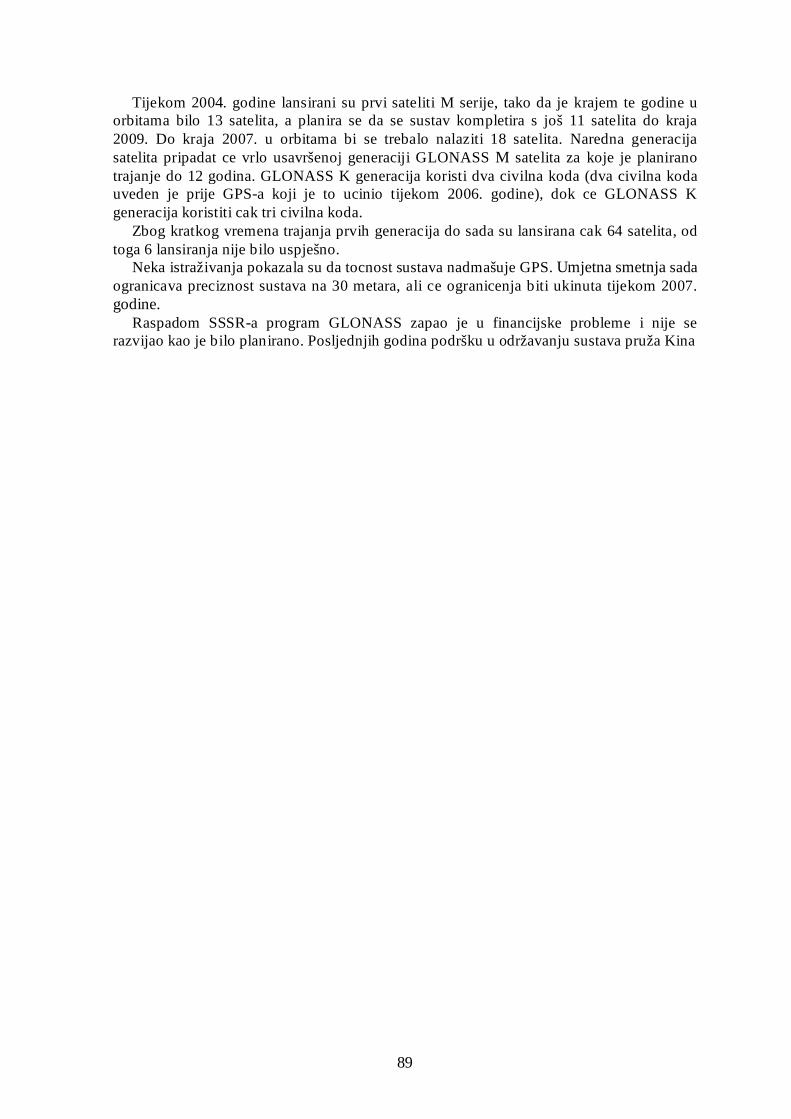
Najvažnija razlika izmedu GPS-a i GLONASS-a je planirano vrijeme trajanja satelita. Dok je prva generacija GLONASS-ovih satelita bila predvidena da traje svega dvije godine, prva je generacija GPS-ovih satelita planirana na trajanje od 7,5 godina. Druga generacija GPS satelita lansiranih izmedu 1989. i 1997. trajala je deset godina. Predzadnja generacija GLONASS satelita planirana je na trajanje od tri godine, a najnovija generacija tih satelita (GLONASS – M sateliti) planirana je za rok trajanja od 7 godina. U donjoj tablici prikazan je status aktivnih satelita sustava, zakljucno s krajem srpnja 2004. godine.
Selective Availability
?? ? ??????? ? ???????????? ? ??? ??????? ? ??? ?? ? -
GLONASS
89
Tijekom 2004. godine lansirani su prvi sateliti M serije, tako da je krajem te godine u orbitama bilo 13 satelita, a planira se da se sustav kompletira s još 11 satelita do kraja 2009. Do kraja 2007. u orbitama bi se trebalo nalaziti 18 satelita. Naredna generacija satelita pripadat ce vrlo usavršenoj generaciji GLONASS M satelita za koje je planirano trajanje do 12 godina. GLONASS K generacija koristi dva civilna koda (dva civilna koda uveden je prije GPS-a koji je to ucinio tijekom 2006. godine), dok ce GLONASS K generacija koristiti cak tri civilna koda.
Zbog kratkog vremena trajanja prvih generacija do sada su lansirana cak 64 satelita, od toga 6 lansiranja nije bilo uspješno.
Neka istraživanja pokazala su da tocnost sustava nadmašuje GPS. Umjetna smetnja sada ogranicava preciznost sustava na 30 metara, ali ce ogranicenja biti ukinuta tijekom 2007. godine.
Raspadom SSSR-a program GLONASS zapao je u financijske probleme i nije se razvijao kao je bilo planirano. Posljednjih godina podršku u održavanju sustava pruža Kina


![Pasivni filter Aktivni filter - pogoni.etf.rs Aktivni filter-Aktivni ispravljac_2018.pdf · Niskopropusni filter [2] - Ovi filteri se koriste za eliminisanje svih harmonijskih komponenti](https://img.pdfslide.tips/doc/110x75/5e1af6c88d5ead14430499d2/pasivni-filter-aktivni-filter-aktivni-filter-aktivni-ispravljac2018pdf-niskopropusni.jpg)

























