Embed Size (px)
DESCRIPTION
un documento el cual podrán visualizar las actividades necesarias sobre calculo vectorial
Citation preview

Unidad 4 Funciones reales de varias variables
4.1 Definición de una función de varias variables
Una función de valor real, f, de x, y, z,... es una regla para obtener un nuevo número, que se escribe como f(x, y, z,...), a partir de los valores de una secuencia de variables independientes (x, y, z,...).
La función f se llama una función de valor real de dos variables si hay dos variables independientes, una función de valor real de tres variables si hay tres variables independientes, y así sucesivamente.
Como las funciones de una variable, funciones de varias variables se pueden representar en forma numérica (por medio de una tabla de valores), en forma algebraica (por medio de una formula), y en forma gráfica (por medio de una gráfica).
Observamos entonces que de acuerdo con la situación especifica que queramos describir, requerimos el tipo de función adecuada. Según si el dominio D y el rango R son subconjuntos de R; R2 o R3 las funciones se clasifican de la siguiente forma:Función Nombre
En cada caso, donde aparece R3 lo podemos sustituir por R2 y el nombre se conserva.Las denominaciones escalar o vectorial se refieren a si la imagen de la función es unNumero o es un vector.Ejemplo: la función g está definida porg (x, y, z) = x2+y2-zEntonces el paraboloide circular z= x2+y2, mostrado en la figura, es la superficie de nivel de g en 0. La superficie de nivel de g en el número k tiene la ecuación z + k = x2 + y2 , un paraboloide circular cuyo vértice es el punto (0,0 –k) sobre el eje z. en la figura muestra las superficies de nivel para k igual a -4,-2, 0, 2 y 4

Leer más: http://www.monografias.com/trabajos78/funciones-dominio-rango-curva-nivel/funciones-dominio-rango-curva-nivel.shtml#ixzz3IWGd4Wk1
4.2 Grafica de una función de varias variables
Representación gráfica de una función de varias variables.
Definición 6 (Gráfica o grafo) La gráfica de una función de n variables x1,. . ., xn es el conjunto de puntos (x1,. . ., xn, z) ∈ Rn+1 que satisfacen
z = f (x1,. . ., xn)Con (x1, . . . , xn) en el dominio de f.
La interpretación geométrica de la gráfica es la siguiente:
Para n = 1. La gráfica de una función f: R → R la generan los puntos (x, y) tales que y = f (x)
Y se puede representar como una curva en R2:

Para n = 2. La gráfica de una función f : R2 → R la generan los puntos (x, y, z) tales que
z = f (x, y) y se puede representar como una superficie en R3:
Para n ≥ 3. La gráfica de una función f: Rn → R la generan los puntos (x1, . . . , xn, z) tales que z = f (x1, . . . , xn) y no es posible representarlo de forma completa sobre un papel ya que necesitaríamos ser capaces de representar conjuntos sobre, al menos, cuatro ejes coordenados, es decir en R4.
Nos tendremos que conformar con representaciones parciales.
4.3 Curvas y superficies de nivel
Las curvas de nivel son aplicadas en el área de la Ingeniería para mostrar en el plano curvas isotermas, mapas topográficos de regiones montañosas que identifican las curvas de altitud de contorno de una superficie o líneas equipotenciales, por mencionar algunas. En las curvas Isotermas la líneas continuas enlazan la misma temperatura en la zona. En los mapas topográficos, si se desplazara una persona a lo largo de una curva de nivel se mantendría a la misma altitud.
DEFINICIÓN Curva de nivelEl conjunto de puntos (x, y) en el plano donde una función de dos variables independientes tiene un valor constante f(x, y) = c, es una curva de nivel de f.

0c0c
0c
0c
Ejemplo 1. Trazar algunas curvas de nivel de la función f ( x , y )=−x2− y2+4
Para c = 4, c = 3, c = 0 y c = –5.
Solución
a) Para c = 4; −x2− y2+4=4 ; −x2− y2=0 ; x2+ y2=0 ; (1)
La expresión (1) representa un punto cuando f(x,y) = c = 4
b) Para c = 3; −x2− y2+4=3 ; −x2− y2=−1 ; x2+ y2=1 ; (2)
La expresión (2) representa una circunferencia de radio r =1 .
c) Para c = 0; −x2− y2+4=0 ; −x2− y2=−4 ; x2+ y2=4 ; (3)
La expresión (3) representa una circunferencia de radio r = 2
d) Para c = –5; −x2− y2+4=−5 ; −x2− y2=−9 ; x2+ y2=9 ; (4)
La expresión (4) representa una circunferencia de radio r = 3
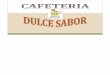
La superficie es un paraboloide abierto hacia abajo, su extremo máximo está en z = 4 y las curvas de nivel de la función son círculos. Tal como se ilustra a continuación en las figuras 1, 2 y 3.
Fig 2 Mapa de contorno
Fig 1. Las trazas horizontales son curvas de nivel
Fig 3 Mapa de contorno con los valores dados de c

Ejemplo 4. Bosqueje la curva de nivel de f ( x , y )=x2+ y2 que pasa por (1, 1)
Solución: Calculamos f(1, 1) = c
f (1 , 1)=(1)2+(1)2=2f (1 , 1)=c=2x2+ y2=2
esta expresión representa la ecuación de la circunferencia x2+ y2=r2
de radio r=√2
.......................
.....................
SUPERFICIES DE NIVELSi f (x,y,z) es una función de tres variables y k una constante que debe satisfacer los valores del rango de la función. La gráfica de la ecuación f(x,y,z) = k es una superficie de nivel.
Por ejemplo, los troncos de los árboles con muchos años de vida contienen en su estructura interna superficies de nivel donde han quedado registrado los periodos de tiempo que han vivido.
Figura 7. Gràfica de f ( y , z )=x2+ y2 y curvas de nivel
Figura 8. Curva de nivel para c = 2 de la figura 7. (círculo más interno).

Gracias a los aparatos científicos que se han construido para la ciencia médica podemos observar las superficies de nivel del cuerpo humano a diferentes niveles de profundidad de su superficie, permitiendo explorar dentro del mismo.
Ejemplo 2. Describir las superficies de nivel de la función f ( x , y , z )=x2+ y2+ z2 (1)
Solución: Cada superficie de nivel tiene una ecuación de la forma x2+ y2+ z2=k (2)
Donde k es mayor o igual que cero. La expresión (2) es la ecuación de una familia de esferas concéntricas cuya forma estándar es:
x2+ y2+ z2=r 2
Donde r es el radio de la esfera
Si k = 0, se tiene un punto en el origen.
Si k = 1, la superficie es una esfera de radio 1.
Si k = 4, entonces es una esfera de radio 2.
En general, si k > 0 se obtiene una familia de esferas concéntricas, cuyo centro corresponde al punto (0, 0, 0).
Y f ( x , y , z )=x2− y2−z2
4.4 Derivadas parciales de funciones de varias variables
Sea una función de dos variables z = f(x, y), se definen las derivadas parciales:
(Una definición obvia si la comparamos con la derivada de una función de una variable) Para la derivada de z "respecto de x" consideramos a la variable "y"

como si fuera una constante, mientras que al hacer la derivada de z "respecto de y" consideramos a la variable "x" como si fuera constante.
Veamos, como ejemplo, las dos derivadas parciales de la función: :
Para ello recordemos que la derivada de la función z = eu es: z’ = u’ . eu , siendo u en nuestro caso: x2 + y2 , entonces la derivada de u respecto x es 2x (con la y constante), mientras que la derivada de u respecto y es 2y (con la x constante). Así tenemos:
Otras formas de expresar la derivada de la función z = f(x,y) con respecto a x son:
Mientras que para expresar la derivada de la función z = f(x,y) con respecto a y :
Esta definición de derivada se extiende a funciones de tres o más variables, por ejemplo, para una función de tres variables w = f(x,y,z) sus tres derivadas parciales son:
en cada una de ellas se consideran constantes los dos parametros distintos a los que se realiza la derivada.
4.5 Derivada direccional

Se llaman derivadas direccional de la función z = f(x,y) en un punto P(x,y) en el sentido del vector el siguiente límite si existe y es finito:
Para calcular este límite se toma el vector unitario de la dirección del vector (dividiéndolo por
su módulo). Llamamos t a la longitud del vector , es decir ,con lo cual , de
donde , y el límite se reduce a la única variable t
Si la función f(x, y) es diferenciable, entonces la derivada direccional se calcula por la fórmula:
(es decir la suma de los productos de las parciales por las componentes del vector unitario)
Si la función es de tres variables z=f(x, y, z) la derivada direccional se calcula de manera análoga:
(Las parciales habrá que calcularlas en el punto correspondiente. Las componentes del vector unitario coinciden con los cosenos directores del vector director. Si la función no es diferenciable esta fórmula no es válida y hay que calcular el límite anterior).
Se llama gradiente de una función z = f(x, y) en un punto P(x, y) al vector que sale del punto P y sus componentes son las derivadas parciales de la función en dicho punto
La derivada direccional se puede obtener como el producto escalar del gradiente por el vector unitario (si la función es diferenciable)
El gradiente indica el sentido de crecimiento más rápido de una función en un punto dado. La derivada direccional tiene su valor máximo en el sentido del gradiente y coincide con su módulo:
Si la función es de tres variables u = f(x, y, z) el gradiente se define de forma análoga:

Calcula, aplicando la definición, la derivada direccional de la función en el punto P(1,2) en la dirección que apunta hacia el origen.
Solución:
Hallamos el vector unitario de dirección y el punto genérico X.
Hallamos los valores correspondientes de la función:
Operando y simplificando obtenemos:
4.6 Derivadas parciales de orden superior
Si es una función diferenciable, es posible considerar su función derivada como:
para en el dominio de .

Si para algunos valores existe el se dice que existe la
segunda derivada de la función que se denota por o , que equivale
a . O sea, la segunda derivada de la función se obtiene derivando la primera derivada de la función.
Ejemplos:
1. Si entonces:
y
2. Si entonces:
y derivando nuevamente
Por tanto
Similarmente podemos decir que la derivada de respecto a "x" es la tercera
derivada de respecto a "x" que se denota o .
4.7 Incrementos diferenciales y regla de la cadena

Cuando surgen cuestiones concernientes a la razón entredos cantidades variables, entramos en los dominios del Cálculo Diferencial.
Son por tanto objeto de estudio del cálculo diferencial temas como la velocidad (razón entre la distancia recorrida y el tiempo empleado en recorrerla) de una partícula en un momento determinado, la pendiente (razón entre la diferencia de las ordenadas y las abscisas de dos puntos en el plano cartesiano) de la recta tangente a una gráfica en un punto dado de ésta, etc.
Incrementos: cuando una cantidad variable pasa de un valor inicial a otro valor, se dice que ha tenido un incremento. Para calcular este incremento basta con hallar la diferencia entre el valor final y el inicial.
Para denotar esta diferencia se utiliza el símbolo Dx, que se leee “delta x”.
El incremento puede ser positivo o negativo, dependiendo de si la variable aumenta o disminuye al pasar de un valor a otro.
Derivada de una función:
Sea f una función definida en todo número de algún intervalo I, la derivada de f es aquella función, anotada por f ‘, tal que su valor en cualquier número x de I.
La regla de la cadena es una fórmula para la derivada de la composición de dos funciones. Tiene aplicaciones en el cálculo algebraico de derivadas cuando existe composición de funciones.
Descripción de la regla. En términos intuitivos, si una variable y, depende de una segunda variable u, que a la vez depende de una tercera variable x; entonces, la razón de cambio de y con respecto a x puede ser computado como el producto de la razón de cambio de y con respecto a u multiplicado por la razón de cambio de u con respecto a x.
Descripción algebraica. En términos algebraicos, la regla de la cadena (para funciones de una variable) afirma que si es diferenciable en y es una función diferenciable en, entonces la función compuesta es diferenciable en y

Notación de Leibniz Alternativamente, en la notación de Leibniz, la regla de la cadena puede expresarse como:
Donde indica que g depende de f como si ésta fuera una variable. Esta propiedad asegura que si y = f(x) es una función derivable en un cierto intervalo I.
4.8 Derivación parcial implícita
nciones explícitas y funciones implícitas
En los cursos de cálculo la mayor parte de las funciones con que trabajamos están expresadas en forma explícita, como enla ecuación:
dónde la variable y está escrita explícitamente como función de x. Sin embargo, muchas funciones, por el contrario, están implícitas en una ecuación. La función y = 1 / x, vienedefinida implícitamente por la ecuación: x y = 1.
Si queremos hallar la derivada para esta última ecuación, lo hacemos despejando y, así, y = 1 / x = x -1, obteniendo su derivada fácilmente:
El métodosirve siempre y cuando seamos capaces de despejar y en la ecuación. El problema es que si no se logra despejar y, es inútil este método. Por ejemplo, ¿cómo hallar dy/dx para la ecuación x2 - 2y3 + 4y =2, donde resulta muy difícil despejar y como función explícita de x?
El método de regla de la cadena para funciones implícitas
Ya sabemos que cuando se derivan términos que solo contienen a x, laderivación será la habitual. Sin embargo, cuando tengamos que derivar un término donde aparezca la y, será necesario aplicar la regla de la cadena.
Ejemplo 1:
Aquí las variables coinciden: se derivanormalmente.
Ejemplo 2:
Aquí las variables no coinciden: se usa regla de la cadena.
Ejemplo 3:

Hallar, de la función implícita:
Aplicando la notación, a cada término y extrayendo lasconstantes;
En el primer término las variables coinciden, se deriva normalmente, en el segundo término se aplica la derivada de un producto (primer paréntesis cuadrado), lo mismo en el tercer término.La regla de la cadena se aplica el término, como puede observarse a continuación claramente en el segundo paréntesis,
Quitando paréntesis y ordenando los términos, Pasando algunos términos al lado derecho,
Extrayendo el factor común, Y finalmente despejando, obtenemos la respuesta requerida:
dy/dx con derivadas parciales.
4.9 Gradiente
En cálculo vectorial, el gradiente de un campo escalar es un campo vectorial. El vector
gradiente de evaluado en un punto genérico del dominio de , ( ), indica la
dirección en la cual el campo varía más rápidamente y su módulo representa el ritmo de
variación de en la dirección de dicho vector gradiente. El gradiente se representa con el operador diferencial nabla seguido de la función (cuidado de no confundir el gradiente con la divergencia, ésta última se denota con un punto de producto escalar entre el operador nabla
y el campo). También puede representarse mediante , o usando la notación . La
generalización del concepto de gradiente a campos vectoriales es el concepto de matriz Jacobaina.

Definición
Se toma como campo escalar el que se asigna a cada punto del espacio una presión P (campo escalar de 3 variables), entonces el vector gradiente en un punto genérico del espacio indicará la dirección en la cual la presión cambiará más rápidamente. Otro ejemplo es el de considerar el mapa de líneas de nivel de una montaña como campo escalar, que asigna a cada pareja de coordenadas latitud/longitud un escalar altitud (campo escalar de 2 variables). En este caso el vector gradiente en un punto genérico indicará la dirección de máxima inclinación de la montaña. Nótese que el vector gradiente será perpendicular a las líneas de contorno (líneas "equiescalares") del mapa. El gradiente se define como el campo vectorial cuyas funciones coordenadas son las derivadas parciales del campo escalar, esto es:
Esta definición se basa en que el gradiente permite calcular fácilmente las derivadas direccionales. Definiendo en primer lugar la derivada direccional según un vector:
Una forma equivalente de definir el gradiente es como el único vector que, multiplicado por el vector unitario, da la derivada direccional del campo escalar:
Con la definición anterior, el gradiente está caracterizado de forma unívoca. El gradiente se expresa alternativamente mediante el uso del operador nabla:
ejemplo
1. Dada la función su vector gradiente es el siguiente:
2. Dada la función su vector gradiente es el
siguiente:
3. Dada la función su vector gradiente es el
siguiente:

4.10 Campos vectoriales
Físicamente un campo vectorial representa la distribución espacial de una magnitud vectorial.
Matemáticamente se define un campo vectorial como una función vectorial de las coordenadas o como un
caso especial de una transformación no necesariamente lineal. , en donde representa el
espacio vectorial que hace las veces de dominio y el espacio vectorial que actúa como rango.
El campo ilustrado en la ecuación anterior es un campo vectorial , dado que la función vectorial tiene tres componentes y cada componente es una función de tres variables independientes.
Cuando se modela la distribución de esfuerzos en una estructura, la distribución de fuerzas de naturaleza electromagnética o gravitatoria en el espacio, se hace usando campos vectoriales.
Otros ejemplos de campos vectoriales son las funciones de velocidad asociadas a las trayectorias de las partículas o diferenciales de volumen de una sustancia en condiciones de flujo bien sea laminar o turbulento.
El gradiente de un campo escalar, constituye un ejemplo adicional de campo vectorial, dado que la magnitud y dirección del gradiente de un campo escalar es una función de las coordenadas, tal como se ilustró en la Figura 18.
Líneas de fuerza

La representación de los campos vectoriales se hace mediante mapas semejantes a los de los campos escalares, pero usando líneas que representan la continuidad de la orientación de los vectores de campo sobre una región definida. Estas líneas reciben el nombre de líneas de fuerza.
Al igual que con los campos escalares, un campo vectorial no puede representarse fácilmente en tres dimensiones, por lo que normalmente se hacen proyecciones sobre los planos directores del sistema de coordenadas.
Figura 20 Representación de un campo vectorial de .
Las líneas de fuerza cumplen con las siguientes propiedades:
Los vectores de campo en cualquier punto son siempre tangenciales a la línea de fuerza que pasa por el punto dado.
Las líneas de fuerza no se cruzan en ningún punto aunque pueden seguir trayectorias cerradas . La cantidad de líneas de fuerza en cualquier porción del espacio en que se encuentra definido el
campo es proporcional a la intensidad del campo vectorial.
En algunas otras ocasiones, la representación de campos vectoriales se hace a través de los vectores de campo directamente. En estos casos, la intensidad del campo vectorial se asocia a la densidad de vectores de campo en una región, tanto como a la longitud de los mismos.
Trazado de las líneas de fuerza de un campo vectorial
De acuerdo con la definición de línea de fuerza, una línea de fuerza es tangente a los vectores de campo en todos los puntos del espacio vectorial definido. Esto, se ilustra gráficamente en la Figura 21 .

Figura 21 Relación entre los vectores de campo y la recta tangente a la curva en una línea de fuerza.
Se observa claramente que el vector de campo tiene la misma dirección de la recta tangente a la línea de fuerza en el punto de tangencia.
En este caso, el vector de campo tiene dos componentes denominados y respectivamente; resulta entonces que la relación entre las componentes del vector da como resultado la pendiente de la recta tangente a la línea de fuerza en cada punto de tangencia.
Dado que la pendiente de la recta tangente es la derivada de la curva, se puede entonces proponer una igualdad definida por:
La familia de soluciones a esta ecuación diferencial es entonces la misma familia de curvas que representa las líneas de fuerza.
Para el caso considerado en el Ejemplo 18 , el campo vectorial tiene por ecuación:
En este caso, la ecuación diferencial planteada quedaría:
La familia de soluciones de esta ecuación es de la forma:

4.11 Divergencia rotacional, interpretación geométrica y física
Matemáticamente, esta idea se expresa como el límite de la circulación del campo vectorial, cuando la curva sobre la que se integra se reduce a un punto:Aquí, ΔS es el área de la superficie apoyada en la curva C, que se reduce a un punto. El resultado de este límite no es el rotacional completo (que es un vector), sino solo su componente según la dirección normal a ΔS y orientada según la regla de la mano derecha. Para obtener el rotacional completo deberán calcularse tres límites, considerando tres curvas situadas en planos perpendiculares.Aunque el que el rotacional de un campo alrededor de un punto sea distinto de cero no implica que las líneas de campo giren alrededor de ese punto y lo encieren. Por ejemplo, el campo de velocidades de un fluido que circula por una tubería (conocido como perfil de Poiseuille) posee un rotacional no nulo en todas partes, salvo el eje central, pese a que la corriente fluye en línea recta:
La idea es que si colocamos una rueda de paletas infinitamente pequeña en el interior del campo vectorial, esta rueda girará, aunque el campo tenga siempre la misma dirección, debido a la diferente magnitud del campo a un lado y a otro de la rueda. Fuente vectorial y escalar [editar]Al campo vectorial, , que se obtiene calculando el rotacional de un campo en cada punto,
se conoce como las fuentes vectoriales de (siendo las fuentes escalares las que se obtienen mediante la divergencia).Un campo cuyo rotacional es nulo en todos los puntos del espacio se denomina irrotacional o se dice que carece de fuentes vectoriales. Y si está definido sobre un dominio simplemente conexo entonces dicho campo puede expresarse como el gradiente de una función escalar:

Interpretación física
Según hemos dicho antes, la divergencia puede entenderse como la densidad de fuentes de un campo vectorial, siendo positiva si el campo posee un manantial y negativa si tiene un sumidero. Por ejemplo, en el caso del flujo de calor , los manantiales representan la producción de calor y los sumideros su consumo.
La integral de volumen de la divergencia
será la suma de todas las fuentes que hay en el interior del volumen. Teniendo en cuenta el signo, el resultado será igual a la producción de todos los manantiales, menos el consumo en los sumideros, esto es, la producción neta de calor en el volumen. Si se produce más calor del que se consume, ese calor extra debe escapar al exterior del volumen. Esa emisión al exterior es lo que representa el flujo
Por tanto, lo que nos dice el teorema de Gauss es que lo que escapa hacia el exterior equivale a la producción neta en el interior del volumen.
7.2 EjemploConsideremos el flujo del campo a través de las paredes de un cubo de lado 2a, centrado en el origen y con aristas paralelas a los ejes. El flujo a través de sus caras, tal como se ve en el artículo sobre flujo de un campo vectorial es
Por otro lado, la divergencia del vector de posición, según hemos visto, es

y su integral de volumen
4.12 Valores extremos de funciones de varias variables

Unidad 5 Integración
5.1 Introducción a la integración
Introducción al método de integración por partes
Se muestra la fórmula de integración por partes y de donde se deduce partiendo de la derivada de un producto
Luego con ejemplos se muestra como hacer uso de esta con ejemplos y aclarando como selección al elemento u y al elemento dv que hacen parte de la misma
En este video veremos un de la técnicas de integración más empleadas en el cálculo, este técnica de integración es conocida como integración por partes y nos dice que si tenemos la integral de una función u multiplicada por la derivada de una función v el resultado será u que multiplica a v menos la integral de la función v que multiplica la derivada de la función u, es decir: ∫udv = uv-∫vdu, observemos que esta ecuación nos dice que el resultado de esta integral es un término al cual se le resta una integral, lo cual llevaría a pensar que antes estamos complicando la integración ya que generamos otra nueva

integral, pero esto no es del todo cierto ya que tenemos que la integral ∫vdu es mucho más simple que la integral original siempre y cuando estemos empleando bien el método.
Este método nace de conocer la derivada del producto de dos funciones, en este caso sabemos que: d/dx[f(x)g(x)] = f(x)g’(x)+g(x)f’(x), si despejamos a f de x por la derivada de la función g de x, tenemos que: d/dx[f(x)g(x)]- g(x)f’(x)= f(x)g’(x), vemos que si reacomodamos la expresión e integramos luego a ambos lados de la igualdad obtenemos: ∫ f(x)g’(x)dx = ∫ d/dx[f(x)g(x)] -∫g(x)f’(x) =f(x)g(x)- ∫g(x)f’(x), como vemos si hacemos que u se llame f(x) y que v se llame g(x), obtenemos la expresión a la cual queríamos llegar. La clave en este tipo de problemas es tener claros los parámetros para elegir la función u y la función v, por lo general se acostumbra a escoger como la función u una función que sea fácilmente derivable y la función v como una función fácilmente integrable. En el video se muestra problemas resueltos empleando este método de integración y además enuncian algunos consejos para aprender a establecer la elección de la las funciones u y v.
Formulas básicas de integración.Recordemos que como en las derivadas, las integrales poseen reglas, propiedades y formulas para su procedimiento. Las integrales poseen un signo en su inicio en forma de S alargada y con una terminación de dx, esto las diferencia de otras ecuaciones. Una integral a realizar siempre ira acompañada de una S alargada al inicio y un dx al final. Estas son las formulas básicas de integración.
La integral de “n” numero siempre será nx + C. Ejemplo
La integral de una constante siempre será constante * variable +C (ax+C)
La integral de X elevado a “n” numero será Xn+1, lo que se haga en la exponenciación de la X se pondrá también abajo dividiéndola, es una regla establecida. Ejemplo
La integral que divide arriba sobre una variable abajo será logaritmo natural de variable mas C. La formula marca lnX+C porque arriba en dx no tiene constante ni variable pero sí un 1 imaginario, ejemplo.

La integral de un producto se puede separar siempre y cuando no se altere su ecuación. De esta forma se integra en partes. No tienen que ser 3 productos necesariamente para usar la formula ;) Ejemplo.
La integral de un Binomio (V) es parecida a la formula 3, solo que acá al sacar la derivada del binomio (dv) se comprueba que exista la derivada fuera de V, en caso que no exista, se iguala hasta quedar exacto y se elimina, quedando solo el binomio (V) mas la exponenciación + 1.
Se saca el binomio que es (2+X2)La derivada del binomio es 2X y se le agrega dx, queda 2Xdx. Se comprueba que 2X coincida con el producto de afuera que es X, como es 2X y tenemos X solamente, entonces se tiene que igualar a 2X…¿Cómo?, multiplicando 2(X), lo que hagamos dentro se hace afuera pero en reciproco. Y se elimina la igualdad quedando lo restante.
Ya que se elimino el producto de afuera, se procede con la formula 3, y el ½ estará multiplicando al resultado que quede de la formula.

El 2 que esta en la división del binomio tiene que desaparecer, no se puede multiplicar directo con el 2 de afuera. Para eliminarlo se debe multiplicar medios con medios, extremos con extremos.
En realidad se ven muchos pasos en este último problema, pero al realizarlo apenas alcanza unas 6 líneas de cuaderno. No son todas las formulas, hay mas formulas que son las de exponenciación y las formulas trigonométricas. También existen identidades trigonométricas y métodos (casos) que hacen de los problemas complicadísimos mas fáciles de entender y solucionar, pero eso lo explicare más adelante.
5.2 Integral de línea
Se dan funciones vectoriales en aplicaciones físicas tales como campo eléctrico y campo magnético. Aparecen con regularidad los productos escalares de estas funciones vectoriales, con otro vector tal como la distancia o longitud de un trayecto. Cuando tal producto se suma sobre una longitud de trayecto, donde cambian tanto las magnitudes como las direcciones, esa suma viene a ser una integral llamada integral de línea.
También se usa una integral de línea en la definición general de trabajo en mecánica.

5.3 Integrales iteradas dobles y triples
La integración iterada es un método de integración en el cual efectuamos la operación de integración en cascada con respecto a cualquier variable en relación con las otras variables que se mantienen constantes. La notación convencional de la integración iterada es como se muestra a continuación,
En el ejemplo anterior, primero se calcularía la integración con respecto a la variable y, y luego con respecto a la variable x. Por motivos de conveniencia y para aumentar la comprensión, también puede ser escrita como,
La integración iterada también puede realizarse como integración definida e indefinida.
En el ejemplo anterior hemos mostrado una integración indefinida iterada.
Del mismo modo también puede hacerse que la integración definida itere.
Lo anteriormente definido es una integración iterada doble. De manera similar,también puede llevarse a cabo una integración iterada triple.
En esa situación, efectuamos la integración tres veces en cascada cada momento con respecto a una variable diferente, mientras que tratamos las otras dos variables como términos constantes.

La notación convencional para la integración triple es,
En la figura siguiente, tenemos una función como, z = f(x, y),
Si calculamos la integración doble de esta función, la salida sería algo como,
Vamos ahora comprender el método de cálculo para esta integral. El método para determinar el volumen de una figura sólida mediante dividirla en trozos de igual tamaño e integrarla para el sólido entero es conocido por todos. Sin embargo, es conocido por muy pocas personas que también este puede utilizarse para determinar la integral doble de una función.
Δ
Suponga que la columna cilíndrica Q pasa a través de la figura dada, como se muestra en la figura anterior. Dibuje un plano paralelo al plano y-z en esta figura y nombre el plano como xx’.El área transversal de la columna Q es similar al área de la curva z = f (x’, y). Esta área yace entre (x’, Y2) y (x’, Y1). Aquí los puntos (x’, Y2) y (x’, Y1), son los puntos de intersección de la región dada y del plano de intersección. La sección transversal de esta pieza es,
La figura anterior es una mirada cercana de la parte inferior de la figura dada. Suponga que el mayor valor adquirido por x es b y el valor más pequeño es a. Como se puede ver en la figura anterior la recta x= x’ intersecta el plano R en sólo dos puntos y los valores correspondientes de y en estos puntos son Y1 y Y2. El valor de Y1 es menor que Y2. Es posible determinar el valor de Y para algún valor de x a partir de la ecuación de frontera de la región R.
La ecuación anterior puede reescribirse como,
Al colocar este valor en la ecuación del volumen obtenemos,
Donde la ecuación de volumen es,
Para esta ecuación, primero realizamos la integración con respecto ay, la cual es

la integración interior considerando a x como un término constante y luego con respecto a x considerando a y como término constante.
De la misma forma, la integración iterada triple se utiliza para calcular el momento de inercia, centroides, etc. La integración triple también es calculada en los sistemas de coordenadas esféricas y cilíndricas.
5.4 Aplicaciones a áreas y solución de problema
Aplicaciones a áreas y solución de problema
Suma y resta de vectores: método gráfico y analítico.
Cuando necesitamos sumar 2 o más magnitudes escalares de la misma especie lo hacemos aritméticamente. Por ejemplo, 2kg + 5kg = 7kg; 20m2 + 10 m2 = 35m2;3h + 4h = 7h; 200K + 100K = 300K. Sin embargo, para sumar magnitudes vectoriales, que como ya mencionamos aparte de magnitudes tienen dirección y sentido, debemos utilizar métodos diferentes a una simple suma aritmética. Estos métodos pueden ser gráficos o analíticos, pero ambos casos se consideran además de la magnitud del vector, su dirección y su sentido.
Resolución de problemas de suma de vectores
Un jinete y su caballo cabalgan 3km al norte y después 4km al oeste.
Calcular:
¿Cuál es la diferencia total que recorren?
¿Cuál es su desplazamiento?
Solución:
Como la distancia es una magnitud escalar, encontramos la distancia total recorrida al sumar aritméticamente las dos distancias:

Dt = d1+ d2= 3km + 4km = 7km
para encontrar su desplazamiento, que es una magnitud vectorial toda vez que corresponde a una distancia medida en una dirección particular entre dos puntos(el de partida y el de llegada), debemos hacer un diagrama vectorial. Para ello, dibujamos a escala el primer desplazamiento de 3km realizado al norte, representado por d1, después el segundo desplazamiento de 4 Km. al oeste representado por d2. Posteriormente, unimos el origen del vector d1, con el extremo del vector d2, al fin de encontrar el vector r equivalente a la suma vectorial de los dos desplazamientos. El origen del vector resultante R es el mismo que tiene el origen del vector d1 y su extremo coincide con el vector d2. Para calcular la magnitud de R medimos su longitud de acuerdo con la escala utilizada y su dirección se determina por el ángulo que forma. Así, encontramos que R =5 Km. con un ángulo de 37º en dirección noroeste.
Descomposición y composición rectangular de vectores por métodos gráficos y analíticos.
Un sistema de vectores puede sustituirse por otro equivalente, el cual puede contener un número mayor o menor de vectores que el sistema considerado. Si el sistema equivalente tiene un número mayor de vectores, el procedimiento se llama descomposición. Si el sistema equivalente tiene un número menor de vectores, el procedimiento se denomina composición.
En la siguiente, se muestra un vector a cuyo punto de aplicación se ha colocado en el origen de un sistema de coordenadas cartesianas o coordenadas rectangulares. Si a partir del extremo del vector a trazamos una línea perpendicular hacia el eje de las X y otra hacia el eje de las Y, los vectores a x y a y así formados, reciben el nombre de las componentes rectangulares del vector a.se les llama rectangulares por que las componentes forman entre si un ángulo (90º).

Se llama componentes de un vector aquellas que los sustituyen en la composición. Un ejemplo: encontrar gráfica y analíticamente las componentes rectangulares del siguiente vector.
Solución por método grafico
Para encontrar de manera grafica las componentes rectangulares o perpendiculares del vector, primero tenemos que establecer una escala. Para este caso puede ser: 1cm = 10N
Trazamos nuestro vector al medir el ángulo de 30º con el transportador. Después a partir del extremo del vector, trazamos una línea perpendicular hacia el eje delas X y otra hacia el eje de las Y. en el punto de intersección del eje X quedara el extremo del vector componente Fx. En el punto de intersección del eje Y quedara el extremo del vector componente Fy. En ambas componentes su origen será el mismo que tiene el vector F = 40N, el cual estamos descomponiendo:
Par encontrar el valor de la componente en X del vector F o sea Fx, basta medir con regla la longitud, y de acuerdo con la escala encontrar su valor. En este caso mide aproximadamente 3.4cm que representan 34N.
Para hallar el valor de la componente de Y del vector F o sea Fy, es suficiente medir con la regla la longitud, y según la escala encontrar su valor que en este caso es de casi 2.0 cm., es decir, de 20N.
Solución por método analítico
Calculo de Fy:
Sen 30º = cateto opuesto = Fy
Hipotenusa F
Despejemos Fy: Fy = F sen 30º = 40N x 0.5 = 20N
Calculo de Fx: Cos 30º = cateto adyacente = Fx Hipotenusa F
Despejemos Fx: Fx = F cos 30º = 40N x 0.8660 = 34.64N

Si comparamos los dos resultados obtenidos para calcular el valor de Fy Y Fx de manera gráfica y analítica, encontraremos una pequeña diferencia. Esto se explica si consideramos que al hallar las componentes gráficamente estamos expuestos a cometer errores al trazar el vector y al medir el valor de las componentes. En cambio, de manera analítica se eliminan estos errores y el valor de las componentes es obtenido con mayor precisión
5.5 Integral doble en coordenadas polares
De la misma manera en que la integral de una función positiva f (x) de una variable definida en un intervalo puede interpretarse cómo el área entre la gráfica de la función y el eje x en ese intervalo, la doble integral de una función positiva f (x, y) de dos variables, definida en una región del plano xy, se puede interpretar como el volumen entre la superficie definida por la función y el plano xy en ese intervalo. Al realizar una “integral triple” de una función f (x, y, z) definida en una región del espacio xyz, el resultado es un hipervolumen, sin embargo es bueno notar que si f (x, y, z) = 1 el resultado se puede interpretar como el volumen de la región de integración. Para integrales de órdenes superiores, el resultado geométrico corresponde a hipervolúmenes de dimensiones cada vez superiores.La manera más usual de representar una integral múltiple es anidando signos de integración en el orden inverso al orden de ejecución (el de más a la izquierda es el último en ser calculado), seguido de la función y los diferenciales en orden de ejecución. El Dominio de Integración se representa simbólicamente para cada diferencial sobre cada signo de integral, o a menudo es abreviado por una letra en el signo de integral de más a la derecha:
Es importante destacar que es imposible calcular la antiderivada de una función de más de una

variable por lo que las integrales múltiples indefinidas no existen.
Definicion
Una forma relativamente sencilla de definir las integrales múltiples es mediante su representación geométrica como la magnitud del espacio entre el objeto definido por la ecuación xn + 1 = f(x1,…,xn) y una región T en el espacio definido por los ejes de las variables independientes de la función f (si T es una región cerrada y acotada y f está definida en la región T). Por ejemplo, si n = 2, el volumen situado entre la superficie definida por x3 = f(x1,x2) y una región T en el plano x1×2 es igual a algúna integral doble, si es que la función f está definida en región T.
Se puede dividir la región T en una partición interior Δ formada por m subregiones rectangulares sin solapamiento que estén completamente contenidas en T. La norma | | Δ | | de esta partición está dada por la diagonal más larga en las m subregiones.
Si se toma un punto (x1i,x2i,…,xni) que esté contenido dentro de la subregión con dimensiones Δx1iΔx2i…Δxni para cada una de las m subregiones de la partición, se puede construir un espacio con una magnitud aproximada a la del espacio entre el objeto definido por xn + 1 = f(x1,…,xn) y la subregión i. Este espacio tendrá una magnitud de:
Entonces se puede aproximar la magnitud del espacio entero situado entre el objeto definido por la ecuación xn + 1 = f(x1,…,xn) y la región T mediante la suma de Riemann de las magnitudes de los m espacios correspondientes a cada una de las subregiones:
Esta aproximación mejora a medida que el número m de subregiones se hace mayor. Esto sugiere que se podría obtener la magnitud exacta tomando el límite. Al aumentar el número de subregiones disminuirá la norma de la partición:
El significado riguroso de éste último límite es que el límite es igual L si y sólo si para todo existe un δ > 0 tal que
para toda partición Δ de la región T (que satisfaga | | Δ | | < δ), y para todas las elecciones posibles de (x1i,x2i,…,xni) en la iésima subregión. Esto conduce a la definición formal de una integral múltiple:
Si f está definida en una región cerrada y acotada T del definido por los ejes de las variables independientes de f, la integral de f sobre T está dada por:
siempre que el límite exista. Si el límite existe se dice que f es integrable con respecto a T.
Propiedades
Las integrales múltiples comparten muchas de las propiedades de las integrales simples. Si f y g son funciones continuas en una región cerrada y acotada D en un espacio Rn y c una constante con respecto a todas las variables involucradas entonces se puede demostrar que

5.6 Coordenadas cilíndricas y esféricas
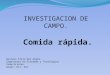
En el sistemas de coordenadas cilíndricas un punto P del espacio tridimensional está representado por la terna ordenada (r,θ,z), donde r y el θ son las coordenadas polares de la proyección de P en el plano xy y z es la distancia dirigida del plano xy a P.
Ecuaciones para transformar de Cilíndricas a Rectangulares
Las coordenadas cilíndricas son útiles en problemas que tienen simetría alrededor de un eje, en ese caso se selecciona el eje z de manera que coincida con el eje de simetría Ecuaciones para transformar de Rectangulares a Cilíndricas
Ecuaciones para transformar de Cilíndricas a Esféricas
El sistema de coordenadas esféricas es especialmente útil en problemas donde hay simetría alrededor de un punto, y el origen se pone en ese punto.
Las coordenadas esféricas (ρ, θ, φ) de un punto P en el espacio, donde ρ =│OP│ es la distancia del origen a P, θ es el mismo ángulo que en las coordenadas cilíndricas, y φ es el ángulo entre el semieje positivo z y el segmento de recta OP. Note que
P≥ 0 0≤φ≤ πEl sistema de coordenadas esféricas es especialmente útil en problemas donde hay simetría alrededor de un punto, y el origen se pone en ese punto.
Dado un vector del espacio tridimensional y tres planos que se cortan en el punto origen de , se definen las coordenadas esféricas como los tres números que se obtienen desde las proyecciones ortogonales del vector sobre las tres aristas de intersección de los planos perpendiculares, por las relaciones siguientes:
Sistema de Coordenadas Esféricas
Es el sistema de coordenadas esféricas un punto p del espacio que viene representado por un trío ordenado , donde:
1.- es la distancia de P al origen, .

2.- es el mismo Angulo utilizado en coordenadas cilíndricas para .
3.- es el Angulo entre el semieje positivo y el segmento recto , .
Nótese que las coordenadas primeras y terceras son siempre no negativas.
Coordenadas EsféricasEcuaciones para transformar de Esféricas a Rectangulares
Ecuaciones para transformar de Rectangulares a Esféricas
Ecuaciones para transformar de Esféricas a Cilíndricas
5.7 Aplicación de la integral triple en coordenadas cartesianas, cilíndricas y esféricas
En geometría plana, el sistema de coordenadas polares se usa para dar una descripción cómoda de ciertas curvas y regiones. La figura siguiente hace posible que recordemos la conexión entre
coordenadas polares y cartesianas. Si el punto P tiene coordenadas cartesianas y
coordenadas polares , entonces, de la figura,
En tres dimensiones hay un sistema de coordenadas, llamadas coordenadas cilíndricas, que es semejante a las coordenadas polares y da descripciones cómodas de algunas superficies y sólidos que por lo general se presentan. Como veremos algunas integrales triples son mucho más faciles de evaluar en coordenadas cilíndricas.En el sistema de coordenadas cilíndricas, un punto P en espacio tridimensional está representado
por el triple ordenado , donde r y q son coordenadas polares de la proyección de P sobre el plano xy y z es la distancia dirigida desde el plano xy a P.

Ejemplo# 01
Evalúe
podemos ver que la proyección de E sobre el plano es el disco . La superficie
inferior de E es el cono y su superficie superior es el plano . Esta región
tiene una descripción mucho más simple en coordenadas cilíndricas:
por lo tanto la integral se puede escribir de la siguiente manera:
Ejemplo# 02
Evalúe donde es la bola unitaria:
puesto que el límite de B es una esfera, se usan coordenadas esféricas:

Ademas las coordenadas esféricas apropiadas porque: , entonces:
Lee mas en : Integrales triples en coordenadas cilíndricas y esféricas, por WikiMatematica.org wikimatematica.org Follow us: @wikimatematica on Twitter | wikimatematica on FacebookLee mas en : Integrales triples en coordenadas cilíndricas y esféricas, por WikiMatematica.org wikimatematica.org Follow us: @wikimatematica on Twitter | wikimatematica on Facebook
-http://mitecnologico.com/sistemas/Main/CalculoVectorial#sthash.LehXJoAa.dpuf