Embed Size (px)
DESCRIPTION
Apostila de Vibrações da FEI
Citation preview

Vibrações em Sistemas Me âni os
Eri C. de SouzaMarko A kermannAirton NabarreteAgenor de Toledo FleuryGuilherme RaszlCentro Universitário da FEI27 de Julho de 20121

Vibrações Me âni as1 INTRODUÇ�OAtualmente, muitos estudos são feitos om objetivo de motivar as apli ações das vibrações emengenharia, omo o projeto de máquinas, fundações, estruturas, motores, turbinas, sistemas de ontrole et . Problemas om vibração podem o orrer devido ao desbalan eamento em motoresalternativos ou mesmo em qualquer sistema rotativo, porém o desbalan eamento ex essivo indi aerros de projeto ou um pro esso de fabri ação pobre. Em motores diesel, o desbalan eamentopode provo ar muito ruído em áreas urbanas. Nos motores a gasolina a grande preo upaçãoatual é a redução das vibrações para o aumento do onforto do ondutor. Na instalação de no-vas máquinas operatrizes na indústria metalúrgi a, omo exemplo, entros de usinagem, tornosCNC, reti� adoras de pre isão, et ., há grande preo upação om a isolação das vibrações demodo a não piorar a pre isão das mesmas durante a sua utilização posterior. Em muitas indús-trias estas máquinas são instaladas na proximidade de máquinas geradoras de vibração, omo:prensas ex êntri as, tesouras guilhotinas, et . Quando temos a frequên ia natural do sistemame âni o oin idindo om a frequên ia de vibração devida a operação, temos o apare imento daressonân ia, que leva o sistema a deslo amentos ex essivos e até à ruptura de algumas partes.Por ausa do efeito desastroso que as vibrações podem ausar às estruturas e às máquinas, testesde vibrações foram in luídos nas normas e pro edimentos de projeto e de veri� ação experimentalnos diversos ramos da engenharia.1.1 De�nição de VibraçãoQualquer movimento que se repete depois de um intervalo de tempo é hamado de vibração ouos ilação. A teoria das vibrações trata do estudo dos movimentos os ilatórios dos orpos e dasforças asso iadas aos mesmos.Um sistema vibratório in lui um meio de armazenar energia poten ial (mola ou elasti idadedos materiais), um meio de armazenar energia inéti a (massa ou inér ia) e um meio pelo quala energia é dissipada (amorte edor ou atrito).A vibração de um sistema o orre pela transformação da energia poten ial em energia inéti ae de energia inéti a em poten ial alternadamente. Se o sistema for amorte ido, alguma energiaé dissipada em ada i lo de vibração e pre isa ser reposta por uma fonte externa se o estado davibração é para ser mantido. Na Fig. 1, para o período T representado em segundos, de�ne-se afrequên ia de os ilação em Hertz
f =1
T, [f ] = Hze a frequên ia angular, ou de os ilação, no SI
ω = 2πf =2π
T, [ω] = rad/s1.2 Vibração Livre de Sistemas Não-Amorte idosNeste aso de vibração, o sistema é onsiderado omo onservativo e, após ser forne ido umaquantidade de energia ini ial, o mesmo se movimenta eternamente, pois não há dissipação de2
Vibrações Me âni as
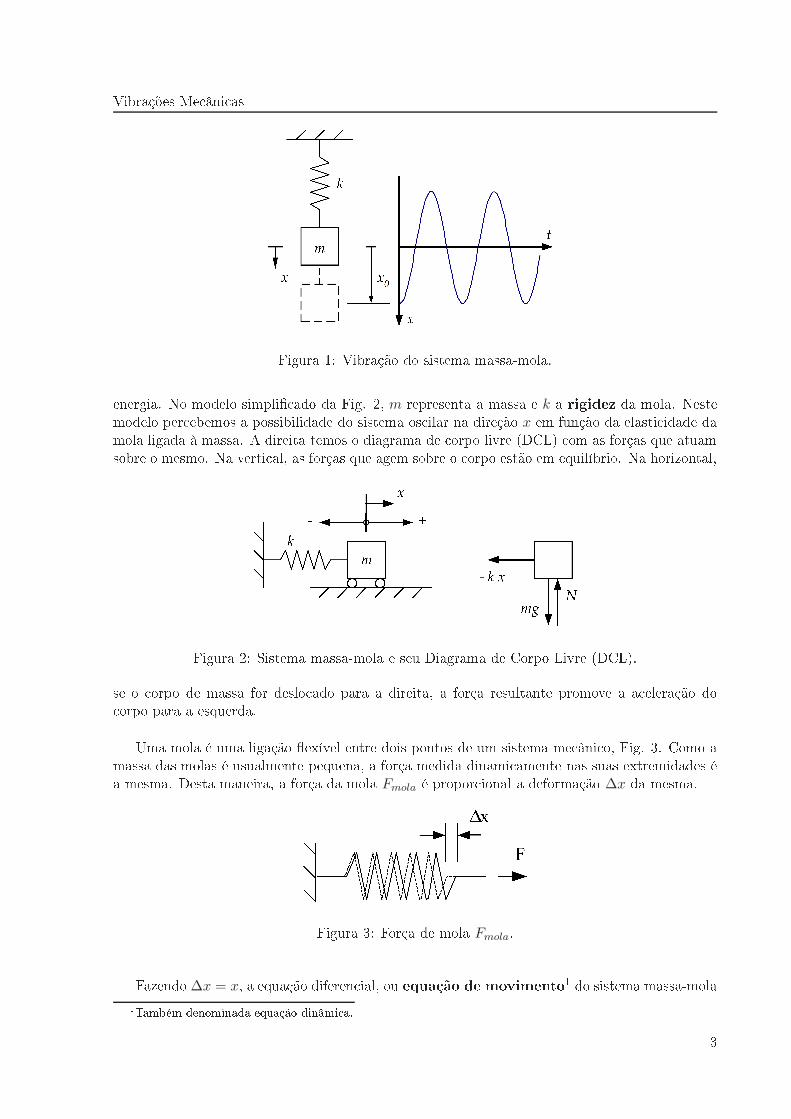
Figura 1: Vibração do sistema massa-mola.energia. No modelo simpli� ado da Fig. 2, m representa a massa e k a rigidez da mola. Nestemodelo per ebemos a possibilidade do sistema os ilar na direção x em função da elasti idade damola ligada à massa. A direita temos o diagrama de orpo livre (DCL) om as forças que atuamsobre o mesmo. Na verti al, as forças que agem sobre o orpo estão em equilíbrio. Na horizontal,
Figura 2: Sistema massa-mola e seu Diagrama de Corpo Livre (DCL).se o orpo de massa for deslo ado para a direita, a força resultante promove a a eleração do orpo para a esquerda.Uma mola é uma ligação �exível entre dois pontos de um sistema me âni o, Fig. 3. Como amassa das molas é usualmente pequena, a força medida dinami amente nas suas extremidades éa mesma. Desta maneira, a força da mola Fmola é propor ional a deformação ∆x da mesma.Figura 3: Força de mola Fmola.Fazendo ∆x = x, a equação diferen ial, ou equação de movimento1 do sistema massa-mola1Também denominada equação dinâmi a. 3

Vibrações Me âni asé dada por:mx(t) =
∑
f ext → mx(t) = −kx(t)onde a força de mola Fmola é al ulada porFmola = kx(t) onde: x(t) = x1(t) − x2(t)O oe� iente k representa a oe� iente de rigidez ou onstante de mola linear e indi a a rigidezque a mola possui. Neste urso, serão onsideradas somente molas de omportamento linear noequa ionamento dos diversos problemas2.Reposi ionando os termos, tem-se:
mx(t) + kx(t) = 0A equação obtida é uma equação diferen ial de 2a ordem.A análise de vibrações tem por objetivo prever a resposta de movimento para o sistemavibratório, portanto é desejável onhe er a resposta para estas equações diferen iais. Felizmente,a solução da equação diferen ial a ima é bem onhe ida dos ursos introdutórios de ál ulo efísi a. Assim, a solução para a variável x(t) é:x(t) = A cos(ωt − φ)A es olha da função osseno pode ter omo alternativa a função seno, pois ambas são funções quedes revem movimentos periódi os de os ilação. A solução da equação diferen ial3, na oordenada
x(t), é hamada de resposta livre, pois não existem forças dinâmi as que provoquem a vibraçãodo modelo massa-mola.Para veri� ar que x(t) é a solução pro urada, deve-se derivar a mesma e substituir na equaçãodiferen ial.x(t) = −Aω sin(ωt − φ)
x(t) = −Aω2 cos(ωt − φ) = −ω2x(t)Substituindo-se na equação diferen ial, tem-se:m(−ω2x(t)
)+ kx(t) = 0 → x(t)
(−mω2 + k
)= 02Um omportamento de mola é dito linear quando a força Fmola é linearmente propor ional a deformação
x. As molas apare em em sistemas estruturais e em muitas o asiões não possuem (ou não trabalham em umafaixa de deslo amentos que garanta) uma dinâmi a linear. O omportamento não-linear de uma mola pode seraproximada por uma série polinomial relação a deformação x de suas extremidades:Fmola = k0 + k1x + k2x
2 + k3x3 + · · ·Considera-se, também, que as molas tem deformação nula quando a força é nula, isto é k0 = 0. As onstantesque multipli am os termos polinomiais de ordem 2 ou superior podem ser onsideradas de pequeno valor. Logo,
Fmola = kx.3Uma representação alternativa da solução x(t) seria:x(t) = A [cos(ωt) cos(φ) + sin(ωt) sin(φ)]
= A cos(φ)︸ ︷︷ ︸
A1
cos(ωt) + A sin(φ)︸ ︷︷ ︸
A2
sin(ωt) = A1 cos(ωt) + A2 sin(ωt)onde a função cos(ωt − φ) foi de omposta om auxílio de trigonometria bási a. 4

Vibrações Me âni asComo x(t) não pode ser zero, pois representa o deslo amento medido na vibração, segue que:−mω2 + k = 0 → ω =
√
k
ma qual é denominada de frequên ia natural e re ebe o sub-índi e n, ou seja, ωn.Logo, ωn é de�nida pela frequên ia de os ilação quando a vibração é livre e não-amorte idae representa uma propriedade do sistema. Consequentemente, �xado o sistema, a vibração livrea onte e sempre om a mesma frequên ia de vibração.As onstantes A e φ são determinadas em função das ondições ini iais. Por quê? Porque orrespondem às mesmas duas onstantes de integração que en ontraríamos se de idíssemosintegrar a equação diferen ial para en ontrar a solução. Suponha que sejam dadas duas ondiçõesini iais, por exemplo,• posição ini ial: x0 = x(0)
• velo idade ini ial: v0 = x(0)Para determinar as duas onstantes A e φ da solução x(t) basta igualar x0 e v0 om x(t) e x(t),ambas avaliadas em t = 0:x0 = x(0) = A cos(ωn0 − φ) = A cos(−φ)
v0 = x(0) = −ωnA sin(ωn0 − φ) = ωnA sin(−φ)Para resolver estas equações, tem-se:cos(−φ) = cos(φ) (função par)sin(−φ) = − sin(φ) (função ímpar)ex0 = A cos(φ) → cos(φ) =
x0
A
v0 = ωnA sin(φ) → sin(φ) =v0
AωnUtilizando relação fundamental da trigonometriacos2(φ) + sin2(φ) = 1tem-se, para a amplitude A:
(x0
A
)2+
(v0
Aωn
)2
= 1 → A =
√
x20 +
(x0
ωn
)2e para a fase φ:sin(φ)
cos(φ)=
v0
x0 ωn
→ φ = arctan
(v0
x0 ωn
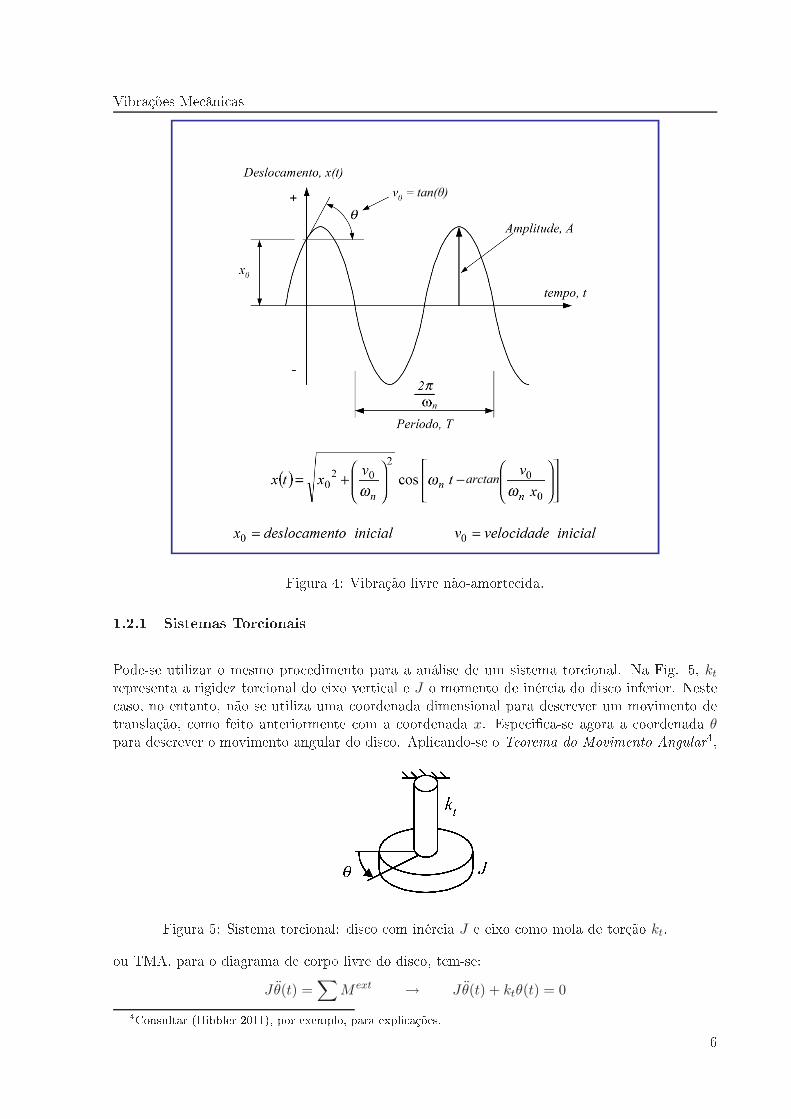
)A Fig. 4 resume o movimento vibratório do modelo massa-mola. 5
Vibrações Me âni astan(θ)
n
arctan
Figura 4: Vibração livre não-amorte ida.1.2.1 Sistemas Tor ionaisPode-se utilizar o mesmo pro edimento para a análise de um sistema tor ional. Na Fig. 5, ktrepresenta a rigidez tor ional do eixo verti al e J o momento de inér ia do dis o inferior. Neste aso, no entanto, não se utiliza uma oordenada dimensional para des rever um movimento detranslação, omo feito anteriormente om a oordenada x. Espe i� a-se agora a oordenada θpara des rever o movimento angular do dis o. Apli ando-se o Teorema do Movimento Angular4,Figura 5: Sistema tor ional: dis o om inér ia J e eixo omo mola de torção kt.ou TMA, para o diagrama de orpo livre do dis o, tem-se:
Jθ(t) =∑
Mext → Jθ(t) + ktθ(t) = 04Consultar (Hibbler 2011), por exemplo, para expli ações. 6

Vibrações Me âni asPer eba que a equação de movimento é exatamente a mesma do aso de translação, tro ando-sem por J e k por kt. A frequên ia natural do sistema tor ional é dada por:
ωn =
√
kt
J1.3 Revisão: Movimento Harm�ni o Simples - MHSÉ um aso parti ular do movimento periódi o em que a evolução de uma grandeza varia segundouma função harm�ni a ou trigonométri a.O MHS é utilizado para representar o movimento de vibração de um sistema me âni o. Istoé uma aproximação, porque na natureza não se espera que o movimento de vibração real sejamodelado �elmente por uma senóide.5 Senóides são soluções de dinâmi as (equações diferen iaisordinárias) lineares e na natureza sempre existe alguma não-linearidade presente, vide Apêndi eA.1. Considere o movimento do ponto P no ír ulo, da Fig. 6, representado por um vetor girante,
ω
sin(ωt)
Figura 6: Movimento Harm�ni o Simples - MHS.ou seja, um fasor de módulo A. Se um vetor gira, sua a fase θ não é mais onstante, mas é umafunção do tempo:θ(t) = ωt − φonde a frequên ia ou velo idade angular ω é onstante e φ é uma fase ini ial.A projeção do fasor na direção horizontal é dado pela função x(t):
x(t) = A cos(θ(t)) = A cos(ωt − φ)Note a relação om o movimento de vibração livre não-amorte ida da seção anterior. A velo idadede vibração pode ser obtida derivando-se a expressão x(t) a ima em relação ao tempo:x(t) = −Aω sin(ωt − φ)e a a eleraçãox(t) = −Aω2 cos(ωt − φ)5No entanto, mesmo os movimentos omplexos são bem aproximados numeri amente por somas de senóidesou de outras funções trigonométri as, omo demonstrado por Fourier há quase 200 anos. 7

Vibrações Me âni asAnalogamente, pode-se es rever a projeção do movimento do vetor na outra direção, segundo oeixo om oordenada y:y(t) = A sin(θ(t)) = A sin(ωt − φ)Es reve-se o movimento do ponto P ompondo as duas projeções x e y através do vetor z, verseção A.2 do Apêndi e:z = x + iy = Aeiθ(t) = Aei(ωt−φ)Determinando-se a velo idade e a eleração angular do vetor z = Aei(ωt−φ), tem-se
z =d
dtAei(ωt−φ) = iωAei(ωt−φ) = iωz = ω
(
ei π2
)
ze a a eleração angularz =
d2
dt2Aei(ωt−φ) = −ω2Aei(ωt−φ) = −ω2
z = ω2(eiπ)zPara re uperar a vibração em apenas uma direção, a direção de x(t), faz-se, para φ = 0
x(t) = Re(z) = A cos(ωt)
x(t) = Re(z) = ωA cos(ωt + π/2) = −ωA sin(ωt)
x(t) = Re(z) = ω2A cos(ωt + π) = −ω2A cos(ωt)1.4 Vibração Livre de Sistemas Amorte idosEm observações reais, per ebemos que as os ilações livres em sistemas me âni os se reduzem aolongo do tempo até que sejam totalmente extintas, porém a resposta em deslo amento obtidaanteriormente pelo modelo massa-mola mostra que a os ilação o orre eternamente om a mesmaamplitude. Para in luir o efeito do de aimento da amplitude deve-se in luir, no modelo anterior,a energia dissipada pelo sistema durante as os ilações. O amorte imento vis oso é a forma mais omum de in luir a dissipação de energia nos sistemas me âni os. A Fig. 7 ilustra os omponentesde um amorte edor de automóvel. Neste aso, quando o êmbolo se deslo a em relação à ar aça,o amorte imento vis oso é resultante da passagem do óleo de uma âmara para a outra atravésde orifí ios estreitos. O es oamento de óleo pelos orifí ios do êmbolo na �gura a ima ausa umaFigura 7: Diagrama esquemáti o do amorte edor.força de amorte imento que é propor ional à velo idade do pistão, porém em direção oposta aomesmo. O diagrama de orpo livre do modelo do sistema segue da Fig. 8:A força de amorte imento vis oso, propor ional à velo idade, é dada por:
Famort(t) = −cx(t), onde c: oe� iente de amorte imento 8

Vibrações Me âni as
Figura 8: Sistema massa-mola-amorte edor e seu DCL.A equação dinâmi a do modelo da �gura anterior é, portanto:mx(t) =
∑
f ext → mx(t) = −kx(t) − cx(t)Reposi ionando os termos da equação a ima, tem-se:mx(t) + cx(t) + kx(t) = 0Esta equação diferen ial tem solução homogênea que orresponde �si amente a uma respostatransiente de movimento, ou seja, não duradoura.Determinar a solução x(t) se torna uma tarefa mais simples passando-se a resolver a equaçãodiferen ial no plano omplexo ou, mais pre isamente, obter a solução geometri amente através deum fasor no plano omplexo, (Nussenzveig 1996). Pode-se utilizar os resultados do MHS, da seção1.3, no auxílio da solução x(t). Portanto, estendendo a dinâmi a para o plano bi-dimensional,onde a oordenada é um número omplexo z, tem-se:mz(t) + cz(t) + kz(t) = 0onde z(t) ∈ C. Adota-se a seguinte solução para a equação a ima
z(t) = Ceλt, λ, C ∈ CSubstituindo na equação diferen ial em z(t), tem-se:(mλ2 + cλ + k
)Aeλt = 0Como a onstante A não pode ser nula, obtém-se então, a equação ara terísti a (algébri a):
mλ2 + cλ + k = 0As raízes dessa equação do 2o grau são as soluções possíveis para λ:λ1,2 = − c
2m±√( c
2m
)2− k
m(1)As soluções λ1,2 podem ser reais ou omplexos dependendo do resultado interno do radi al naequação (1). Para a solução geral da equação diferen ial admite-se a expressão:
z(t) = C1eλ1t + C2e
λ2t, C1, C2 ∈ C (2)onde C1, C2 são onstantes em função das ondições ini iais de movimento. Pela solução a imaapresentada, pode-se on luir que se λ for real então a solução z(t) é igual a x(t) e se apresenta omo uma função exponen ial e não demonstra o omportamento de os ilações. Caso, porém, λfor um número omplexo, então a solução z(t) também é omplexa e a projeção de z(t) em x(t)representa um movimento harm�ni o omo demonstrado anteriormente na seção 1.3. 9

Vibrações Me âni as1.4.1 Fator de Amorte imentoPartindo-se de (1) pretende-se determinar o valor de c que torna e expressão dentro do radi andonula. Portanto:( c
2m
)2− k
m= 0 → ccr = 2m
√
k
mou ccr = 2mωnEste valor de ccr indi a qual o amorte imento ne essário para anular o radi ando em (1). De�ne-se o fator de amorte imento pela expressão
ζ =c
ccr=
c
2mωnque representa um número adimensional, podendo ser expresso na forma de per entagem. Estefator informa quão próximo o amorte imento c presente no sistema está do amorte imento ríti occr.De�nido o fator ζ pode-se rees rever a solução da equação ara terísti a em função de ζ e ωnatravés de:
λ1,2 = −ζωn ± ωn
√
ζ2 − 11.4.2 Sub-Amorte imento (ζ < 1)Neste primeiro aso a solução x(t) indi ará movimento om os ilação ou movimento har-m�ni o.Partindo do radi ando negativo das soluções (1) da equação ara terísti a λ1,2 tem-se:( c
2m
)2− k
m< 0 ou ω2
nζ2 − ω2n < 0Neste aso, omo o radi ando é negativo, faz-se
√
ω2nζ2 − ω2
n =√
[ω2n − ω2
nζ2] (−1) = i√
ω2n (1 − ζ2)Portanto, a solução da equação ara terísti a � a
λ1,2 = −ζωn ± iωn
√
1 − ζ2A parte imaginária denomina-se frequên ia natural amorte ida ωa e representa a frequên iade vibração quando ζ 6= 0:λ1,2 = −ζωn ± iωa → ωa = ωn
√
1 − ζ2Projetando z(t), dado em (2) e om os λ1,2 a ima, no eixo horizontal, obtém-se a evolução da oordenada x(t) om o tempo, segundo a expressão:x(t) = Ae−ζωnt cos(ωat − φ) (3)onde
A =
√
x20 +
(v0 + ζωnx0
ωa
)2 e φ = arctan
(v0 + ζωnx0
ωa x0
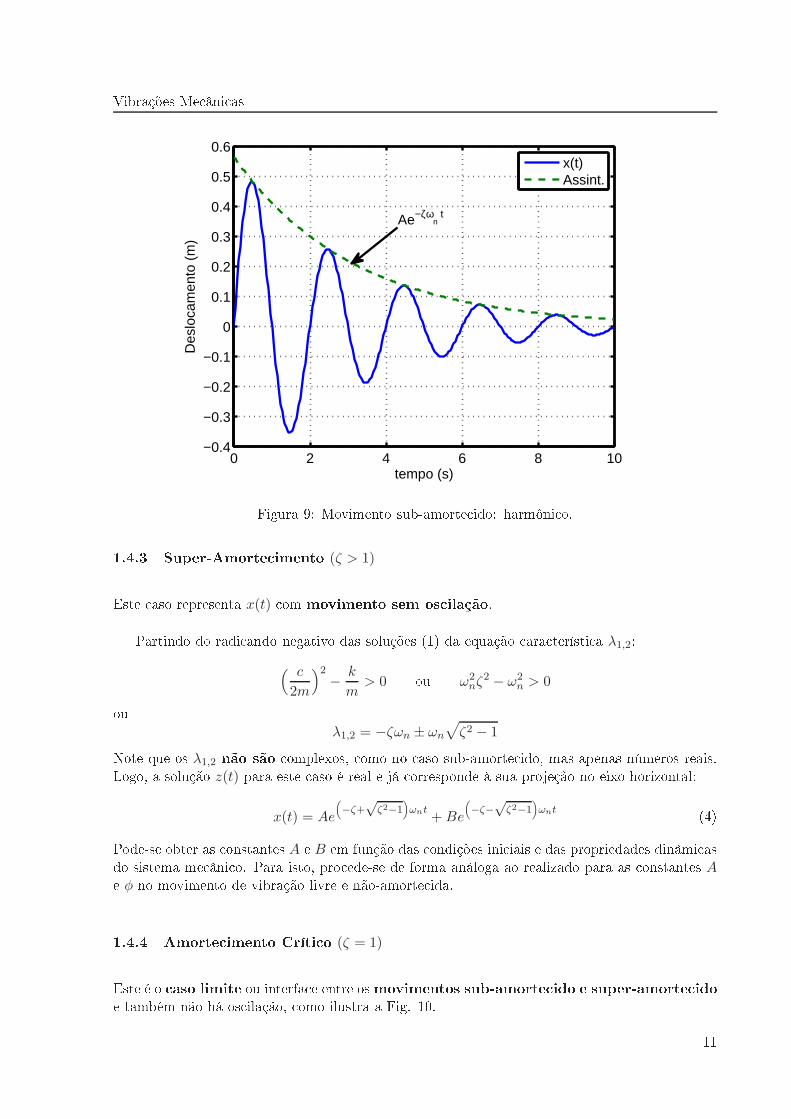
)Note que x(t) é a função que resolve a equação diferen ial original. Na Fig. 9, pode-se interpretara redução de amplitude omo sendo de orrente da energia dissipada pelo amorte edor a ada i lo.10
Vibrações Me âni as
0 2 4 6 8 10−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
tempo (s)
Des
loca
men
to (
m)
x(t)Assint.
Ae−ζωn t
Figura 9: Movimento sub-amorte ido: harm�ni o.1.4.3 Super-Amorte imento (ζ > 1)Este aso representa x(t) om movimento sem os ilação.Partindo do radi ando negativo das soluções (1) da equação ara terísti a λ1,2:( c
2m
)2− k
m> 0 ou ω2
nζ2 − ω2n > 0ou
λ1,2 = −ζωn ± ωn
√
ζ2 − 1Note que os λ1,2 não são omplexos, omo no aso sub-amorte ido, mas apenas números reais.Logo, a solução z(t) para este aso é real e já orresponde à sua projeção no eixo horizontal:x(t) = Ae
(
−ζ+√
ζ2−1)
ωnt+ Be
(
−ζ−√
ζ2−1)
ωnt (4)Pode-se obter as onstantes A e B em função das ondições ini iais e das propriedades dinâmi asdo sistema me âni o. Para isto, pro ede-se de forma análoga ao realizado para as onstantes Ae φ no movimento de vibração livre e não-amorte ida.1.4.4 Amorte imento Críti o (ζ = 1)Este é o aso limite ou interfa e entre osmovimentos sub-amorte ido e super-amorte idoe também não há os ilação, omo ilustra a Fig. 10. 11
Vibrações Me âni asO radi ando na expressão dos λ1,2 é nulo, e as raízes da equação ara terísti a são reais eiguais:λ1,2 = −ζωn = −ωnA solução para este aso � a:
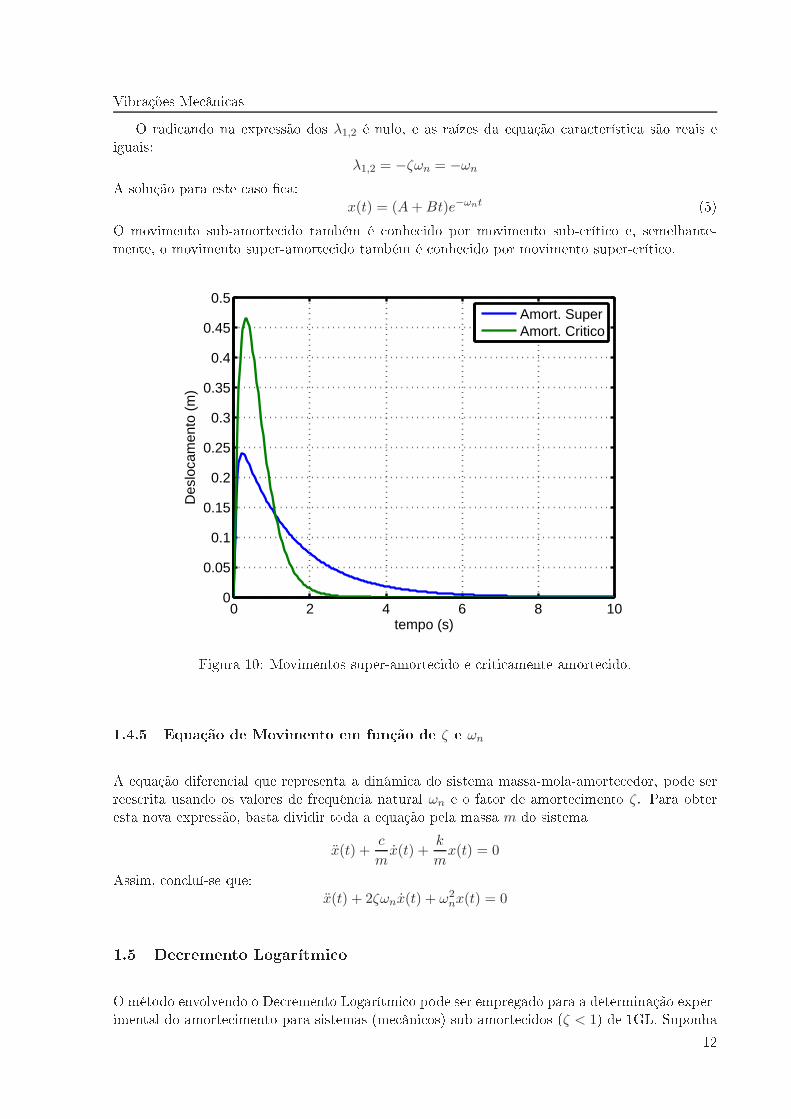
x(t) = (A + Bt)e−ωnt (5)O movimento sub-amorte ido também é onhe ido por movimento sub- ríti o e, semelhante-mente, o movimento super-amorte ido também é onhe ido por movimento super- ríti o.
0 2 4 6 8 100
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
tempo (s)
Des
loca
men
to (
m)
Amort. SuperAmort. Critico
Figura 10: Movimentos super-amorte ido e riti amente amorte ido.1.4.5 Equação de Movimento em função de ζ e ωnA equação diferen ial que representa a dinâmi a do sistema massa-mola-amorte edor, pode serrees rita usando os valores de frequên ia natural ωn e o fator de amorte imento ζ. Para obteresta nova expressão, basta dividir toda a equação pela massa m do sistemax(t) +
c
mx(t) +
k
mx(t) = 0Assim, on luí-se que:
x(t) + 2ζωnx(t) + ω2nx(t) = 01.5 De remento Logarítmi oO método envolvendo o De remento Logarítmi o pode ser empregado para a determinação exper-imental do amorte imento para sistemas (me âni os) sub-amorte idos (ζ < 1) de 1GL. Suponha12
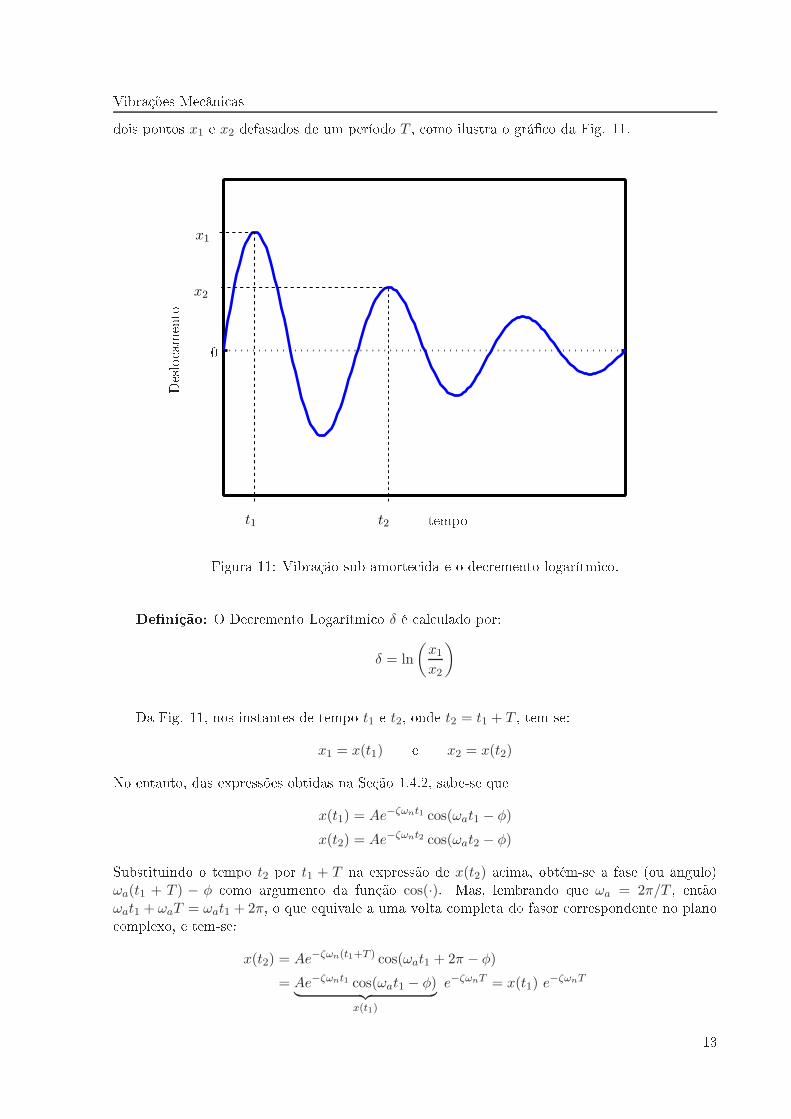
Vibrações Me âni asdois pontos x1 e x2 defasados de um período T , omo ilustra o grá� o da Fig. 11.
0tempo
Deslo amento
t1
x2
x1
t2Figura 11: Vibração sub-amorte ida e o de remento logarítmi o.De�nição: O De remento Logarítmi o δ é al ulado por:δ = ln
(x1
x2
)Da Fig. 11, nos instantes de tempo t1 e t2, onde t2 = t1 + T , tem-se:x1 = x(t1) e x2 = x(t2)No entanto, das expressões obtidas na Seção 1.4.2, sabe-se quex(t1) = Ae−ζωnt1 cos(ωat1 − φ)
x(t2) = Ae−ζωnt2 cos(ωat2 − φ)Substituindo o tempo t2 por t1 + T na expressão de x(t2) a ima, obtém-se a fase (ou ângulo)ωa(t1 + T ) − φ omo argumento da função cos(·). Mas, lembrando que ωa = 2π/T , entãoωat1 + ωaT = ωat1 + 2π, o que equivale a uma volta ompleta do fasor orrespondente no plano omplexo, e tem-se:
x(t2) = Ae−ζωn(t1+T ) cos(ωat1 + 2π − φ)
= Ae−ζωnt1 cos(ωat1 − φ)︸ ︷︷ ︸
x(t1)
e−ζωnT = x(t1) e−ζωnT 13

Vibrações Me âni asSubstituindo x(t1) e x(t2) na de�nição do de remento logarítmi o, segueδ = ln
(x1
x2
)
= ln
(x(t1)
x(t1)e−ζωnT
)
= ln(
eζωnT)
= ζωn2π
ωa
=2πζ
√
1 − ζ2Portanto, resolvendo para ζ, pode-se mostrar queζ =
δ√4π2 + δ2
(6)o que forne e sempre um número não-negativo6.Pode-se estender este resultado para dois pontos defasados de um múltiplo qualquer doperíodo T . Neste aso, de�ne-se o de remento logarítmi o omoδ =
1
nln
(xj
xi
)onde n representa o número de períodos entre os instantes de tempo tj e ti, ou seja, ti = tj +nT .Nestes instantes de tempo, tem-se:xj = x(tj) e xi = x(ti)e mostra-se que o fator de amorte imento ζ é al ulado também pela expressão (6) a ima.1.6 Exer í ios Propostos1) En ontre ζ e ωn para o sistema amorte ido. Responda se o sistema é sub-amorte ido, super-amorte ido ou amorte ido riti amente. (m = 1kg; c = 2kg/s; k = 10N/m).2) En ontre a solução para a equação diferen ial x(t) + 4x(t) + x(t) = 0 para x0 = 1mm e
v0 = 0mm/s. Desenvolva a solução utilizando o programa MathCAD ou MATLAB e imprima ográ� o da solução em função do tempo.3) Tra e o grá� o do deslo amento de um sistema amorte ido uja frequên ia natural é iguala 2Hz e as ondições de ontorno são x0 = 1mm e v0 = 0mm/s. Considere um grá� o ontendovárias urvas, sendo: ζ = 0, 01; ζ = 0, 2 e ζ = 0, 6. Utilize programas omo o MathCAD ouMATLAB.6Note que apenas para ζ pequeno (< 0.2) é válida a aproximação δ = 2πζ. 14
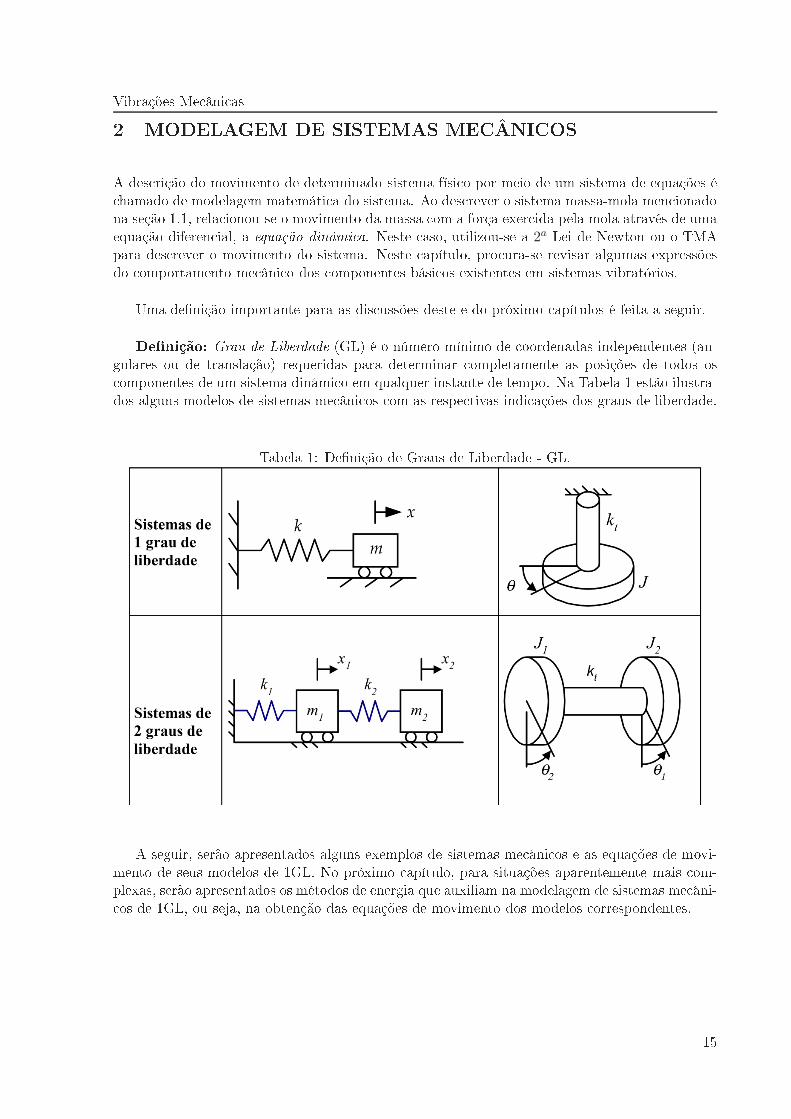
Vibrações Me âni as2 MODELAGEM DE SISTEMAS MECÂNICOSA des rição do movimento de determinado sistema físi o por meio de um sistema de equações é hamado de modelagem matemáti a do sistema. Ao des rever o sistema massa-mola men ionadona seção 1.1, rela ionou-se o movimento da massa om a força exer ida pela mola através de umaequação diferen ial, a equação dinâmi a. Neste aso, utilizou-se a 2a Lei de Newton ou o TMApara des rever o movimento do sistema. Neste apítulo, pro ura-se revisar algumas expressõesdo omportamento me âni o dos omponentes bási os existentes em sistemas vibratórios.Uma de�nição importante para as dis ussões deste e do próximo apítulos é feita a seguir.De�nição: Grau de Liberdade (GL) é o número mínimo de oordenadas independentes (an-gulares ou de translação) requeridas para determinar ompletamente as posições de todos os omponentes de um sistema dinâmi o em qualquer instante de tempo. Na Tabela 1 estão ilustra-dos alguns modelos de sistemas me âni os om as respe tivas indi ações dos graus de liberdade.Tabela 1: De�nição de Graus de Liberdade - GL.
A seguir, serão apresentados alguns exemplos de sistemas me âni os e as equações de movi-mento de seus modelos de 1GL. No próximo apítulo, para situações aparentemente mais om-plexas, serão apresentados os métodos de energia que auxiliam na modelagem de sistemas me âni- os de 1GL, ou seja, na obtenção das equações de movimento dos modelos orrespondentes.15

Vibrações Me âni as2.1 Elementos Estruturais omo MolasA vibração em algumas estruturas pode envolver a tração ou ompressão axial de barras ou vigas, omo é mostrado na Figura 12. Sabe-se que a deformação de uma barra sujeita a uma força axial,Figura 12: Viga sob tração omo sistema de 1GL.se omporta omo a Lei de Hooke7. Utiliza-se a expressão de Hooke para obter a relação entreforça e deslo amento:σ = Eε → F
A= E
x
L→ F =
AE
LxNa expressão a ima, E é o módulo de elasti idade, ou Young, do material, A é a área da seçãotransversal da barra e L é o omprimento anterior à deformação. Comparando a equação obtida om a equação da mola heli oidal, tem-se que:
k =AE
LSe a massa da barra for pequena em relação a massa do blo o, o sistema axial a ima é modelado omo um sistema massa-mola equivalente.Outro exemplo de elemento estrutural fun ionando omo mola é o aso das vigas sujeitas a arregamentos transversais, Figura. 13. Na viga bi-apoiada da Fig. 13, o deslo amento y, ouFigura 13: Viga bi-apoiada om arregamento entral omo sistema de 1GL.�e ha, devido ao arregamento P propor ionado pela massa apoiada sobre o ponto entral damesma, é:
y =PL3
48EI→ P =
48EI
L3ySe a massa da viga é muito pequena em relação a m, o sistema pode ser modelado omo umsistema massa-mola, onde a mola equivalente terá onstante elásti a igual a:
k =48EI
L37Rela iona a tensão σ e a deformação ε de forma linear. 16
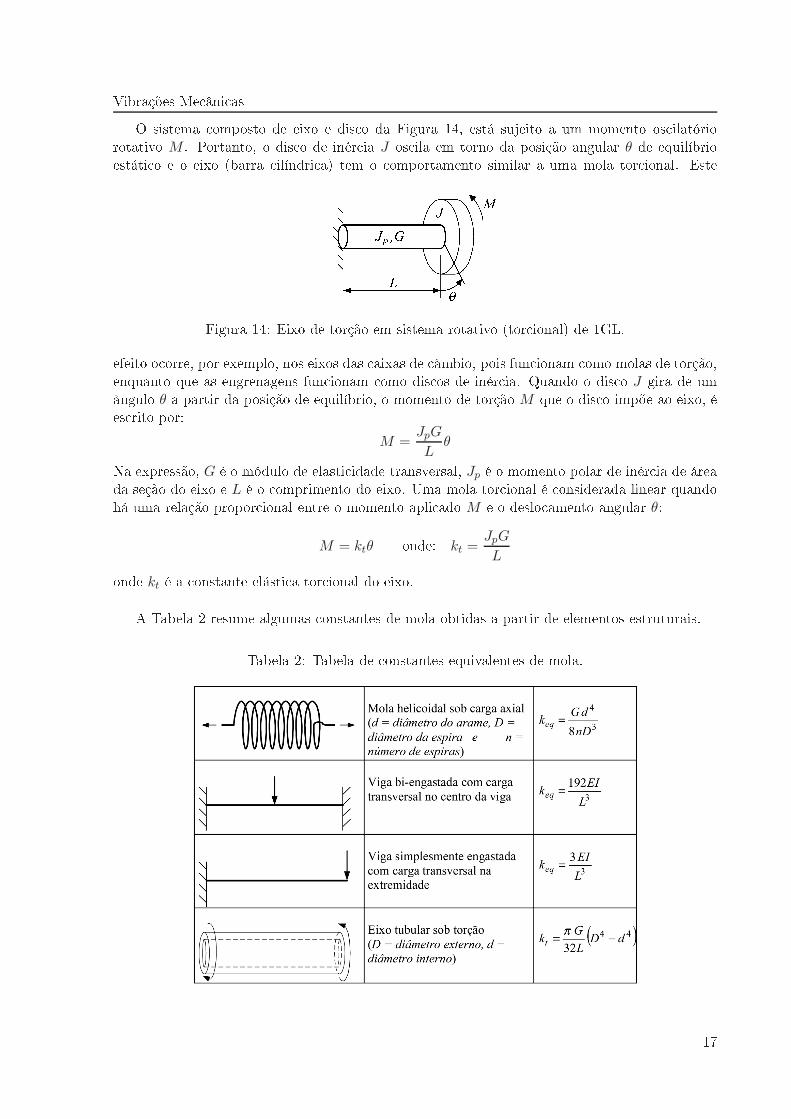
Vibrações Me âni asO sistema omposto de eixo e dis o da Figura 14, está sujeito a um momento os ilatóriorotativo M . Portanto, o dis o de inér ia J os ila em torno da posição angular θ de equilíbrioestáti o e o eixo (barra ilíndri a) tem o omportamento similar a uma mola tor ional. EsteFigura 14: Eixo de torção em sistema rotativo (tor ional) de 1GL.efeito o orre, por exemplo, nos eixos das aixas de âmbio, pois fun ionam omo molas de torção,enquanto que as engrenagens fun ionam omo dis os de inér ia. Quando o dis o J gira de umângulo θ a partir da posição de equilíbrio, o momento de torção M que o dis o impõe ao eixo, ées rito por:
M =JpG
LθNa expressão, G é o módulo de elasti idade transversal, Jp é o momento polar de inér ia de áreada seção do eixo e L é o omprimento do eixo. Uma mola tor ional é onsiderada linear quandohá uma relação propor ional entre o momento apli ado M e o deslo amento angular θ:
M = ktθ onde: kt =JpG
Londe kt é a onstante elásti a tor ional do eixo.A Tabela 2 resume algumas onstantes de mola obtidas a partir de elementos estruturais.Tabela 2: Tabela de onstantes equivalentes de mola.
17

Vibrações Me âni as2.1.1 Molas EquivalentesQuando as molas estão posi ionadas em paralelo, Fig. 15, e a deformação de ada uma é amesma, a força total é a soma direta das forças desenvolvidas em ada mola que depende dasrespe tivas onstantes elásti as. Pro ura-se a substituição das molas em paralelo por uma úni a
Figura 15: Molas asso iadas em paralelo.de onstante elásti a keq . A resultante F de força que age na massa m devido a todas a molas é:F = k1x + k2x + k3x + · · · + knx =
(n∑
i=1
ki
)
x
= keq x → keq =
n∑
i=1
kiQuando as molas estão posi ionadas em série, Fig. 16, a mesma força é desenvolvida emtodas as molas quando deformadas. Entretanto, a deformação sofrida por ada mola é diferentee depende das onstantes elásti as individuais. O deslo amento total x da massa m, devido aFigura 16: Molas asso iadas em série.deformação individual de todas a molas xi, é:
x = x1 + x2 + x3 + · · · + xn
=F
k1+
F
k2+
F
k3+ · · · + F
kn=
(n∑
i=1
1
ki
)
F → F = keqxO deslo amento na extremidade do onjunto, a partir da posição de equilíbrio, é obtido pelasoma das deformações de ada mola:keq =
1∑n
i=11ki 18
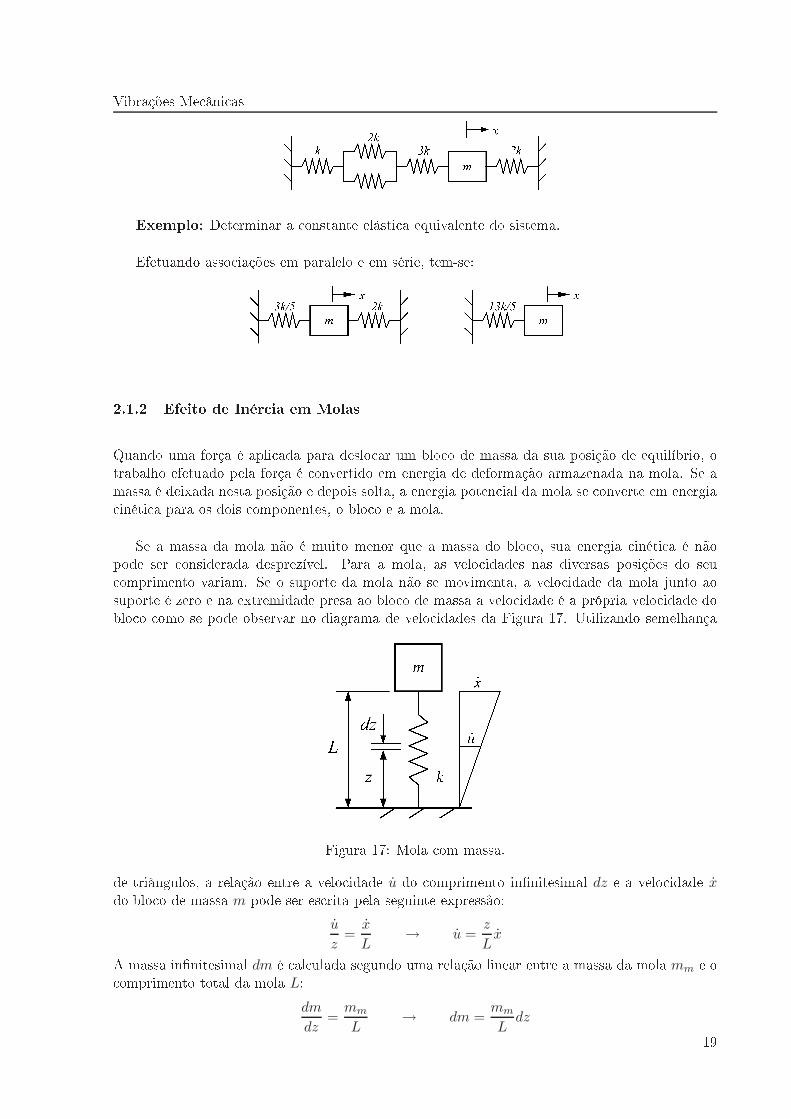
Vibrações Me âni asExemplo: Determinar a onstante elásti a equivalente do sistema.Efetuando asso iações em paralelo e em série, tem-se:
2.1.2 Efeito de Inér ia em MolasQuando uma força é apli ada para deslo ar um blo o de massa da sua posição de equilíbrio, otrabalho efetuado pela força é onvertido em energia de deformação armazenada na mola. Se amassa é deixada nesta posição e depois solta, a energia poten ial da mola se onverte em energia inéti a para os dois omponentes, o blo o e a mola.Se a massa da mola não é muito menor que a massa do blo o, sua energia inéti a é nãopode ser onsiderada desprezível. Para a mola, as velo idades nas diversas posições do seu omprimento variam. Se o suporte da mola não se movimenta, a velo idade da mola junto aosuporte é zero e na extremidade presa ao blo o de massa a velo idade é a própria velo idade doblo o omo se pode observar no diagrama de velo idades da Figura 17. Utilizando semelhança
Figura 17: Mola om massa.de triângulos, a relação entre a velo idade u do omprimento in�nitesimal dz e a velo idade xdo blo o de massa m pode ser es rita pela seguinte expressão:u
z=
x
L→ u =
z
LxA massa in�nitesimal dm é al ulada segundo uma relação linear entre a massa da mola mm e o omprimento total da mola L:
dm
dz=
mm
L→ dm =
mm
Ldz 19
Vibrações Me âni asComo a energia inéti a é o produto da massa pela velo idade ao quadrado, podemos obter aenergia inéti a in�nitesimal dEc por:dEc =
1
2dm (u(z))2Substituindo as expressões a ima na energia dEc, tem-se:
dEc =1
2
mmx2
L3z2dzIntegrando a expressão a ima para todo o omprimento L da mola, obtém-se a energia inéti atotal da mola:
Ec =
∫
dEc =
∫ L
0
1
2
mmx2
L3z2dz =
1
2
(mm
3
)
x2Para o sistema massa-mola temos que a massa equivalente da mola meq que deve ser adi ionadaa massa m do sistema, é:meq|mola =
mm
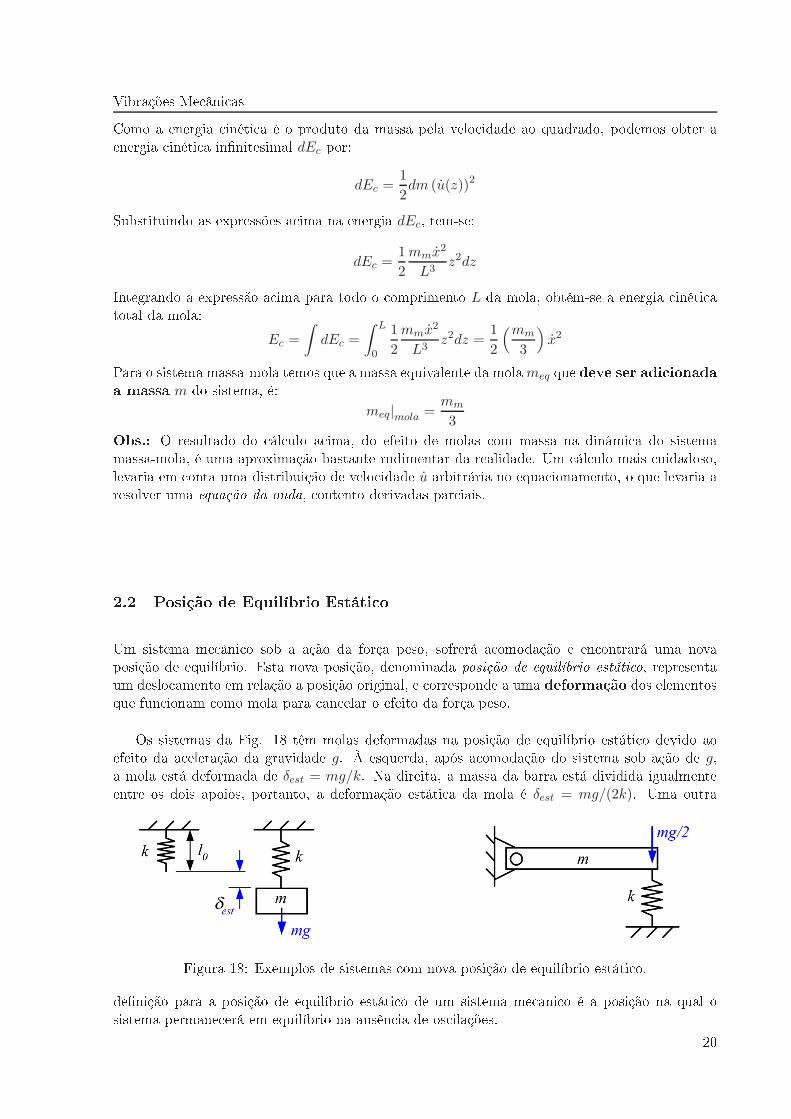
3Obs.: O resultado do ál ulo a ima, do efeito de molas om massa na dinâmi a do sistemamassa-mola, é uma aproximação bastante rudimentar da realidade. Um ál ulo mais uidadoso,levaria em onta uma distribuição de velo idade u arbitrária no equa ionamento, o que levaria aresolver uma equação da onda, ontento derivadas par iais.2.2 Posição de Equilíbrio Estáti oUm sistema me âni o sob a ação da força peso, sofrerá a omodação e en ontrará uma novaposição de equilíbrio. Esta nova posição, denominada posição de equilíbrio estáti o, representaum deslo amento em relação a posição original, e orresponde a uma deformação dos elementosque fun ionam omo mola para an elar o efeito da força peso.Os sistemas da Fig. 18 têm molas deformadas na posição de equilíbrio estáti o devido aoefeito da a eleração da gravidade g. À esquerda, após a omodação do sistema sob ação de g,a mola está deformada de δest = mg/k. Na direita, a massa da barra está dividida igualmenteentre os dois apoios, portanto, a deformação estáti a da mola é δest = mg/(2k). Uma outra
Figura 18: Exemplos de sistemas om nova posição de equilíbrio estáti o.de�nição para a posição de equilíbrio estáti o de um sistema me âni o é a posição na qual osistema permane erá em equilíbrio na ausên ia de os ilações. 20
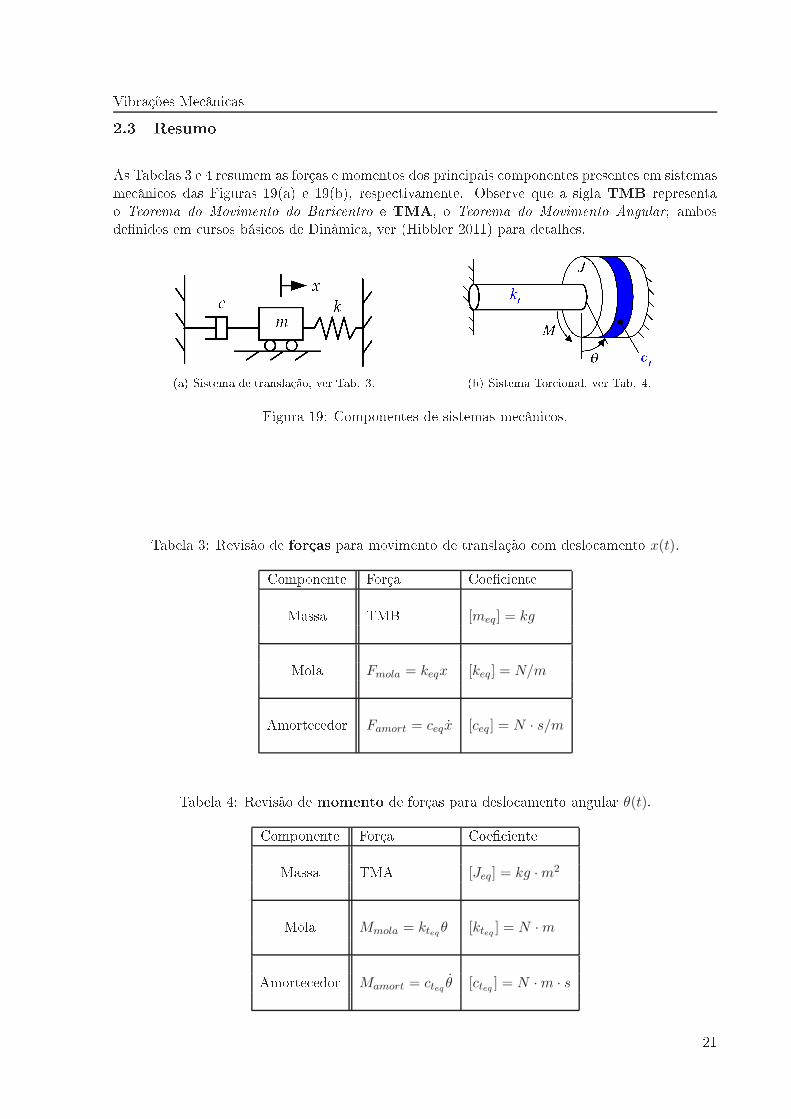
Vibrações Me âni as2.3 ResumoAs Tabelas 3 e 4 resumem as forças e momentos dos prin ipais omponentes presentes em sistemasme âni os das Figuras 19(a) e 19(b), respe tivamente. Observe que a sigla TMB representao Teorema do Movimento do Bari entro e TMA, o Teorema do Movimento Angular; ambosde�nidos em ursos bási os de Dinâmi a, ver (Hibbler 2011) para detalhes.(a) Sistema de translação, ver Tab. 3. (b) Sistema Tor ional, ver Tab. 4.Figura 19: Componentes de sistemas me âni os.
Tabela 3: Revisão de forças para movimento de translação om deslo amento x(t).Componente Força Coe� ienteMassa TMB [meq] = kgMola Fmola = keqx [keq] = N/mAmorte edor Famort = ceqx [ceq] = N · s/mTabela 4: Revisão de momento de forças para deslo amento angular θ(t).Componente Força Coe� ienteMassa TMA [Jeq] = kg · m2Mola Mmola = kteqθ [kteq ] = N · mAmorte edor Mamort = cteq θ [cteq ] = N · m · s 21
Vibrações Me âni as(a) (b) ( )
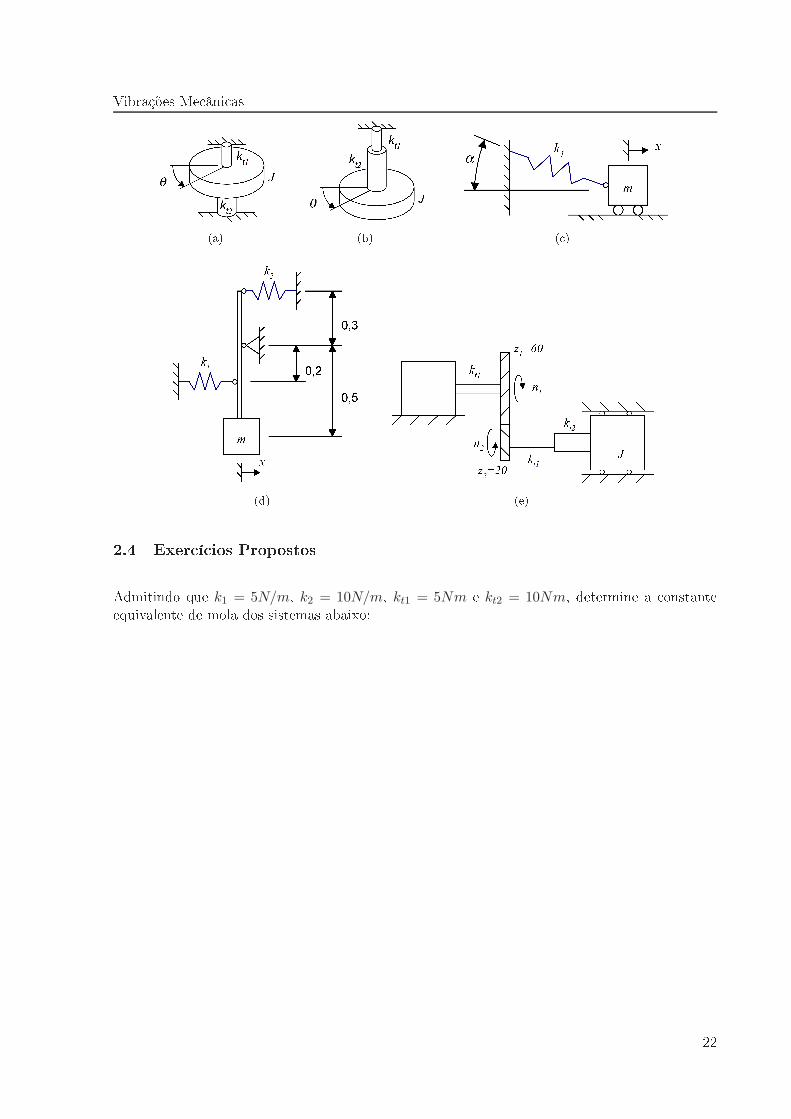
(d) (e)2.4 Exer í ios PropostosAdmitindo que k1 = 5N/m, k2 = 10N/m, kt1 = 5Nm e kt2 = 10Nm, determine a onstanteequivalente de mola dos sistemas abaixo:
22
Vibrações Me âni as3 MÉTODOS DE ENERGIA PARA MODELAGEM3.1 Redução de Sistemas de 1GLMuitas vezes é ne essário analisar o movimento ompleto de sistemas vibratórios que são ompos-tos de alavan as, engrenagens e outras ligações e ompli am aparentemente a análise, pois ada omponente tem movimento diferente. Estando estes omponentes rígidos ligados de forma talque a movimentação de um seja vin ulada a movimentação dos outros, é vantajoso, em geral, aredução do sistema para um equivalente mais simples. Na modelagem de sistemas me âni os de 1Grau de Liberdade, que envolvem a ombinação de massas, inér ias de rotação, molas tor ionais,por exemplo, é omum utilizar-se de métodos de energia para obter as equações dinâmi as domodelo.Revisa-se, primeiramente, as expressões de energia dos omponentes presentes em sistemasme âni os de translação e rotação, omo ilustra a Tabela 5.Tabela 5: Revisão de expressões de energia de omponentes me âni os.Movimento Energia Cinéti a Energia Poten ial Potên ia dissipadaTranslação Ec = 12meqx
2 Ep = 12keqx
2 Pdissp = ceqx2Rotação Ec = 1
2Jeq θ2 Ep = 1
2kteqθ2 Pdissp = cteq θ
2
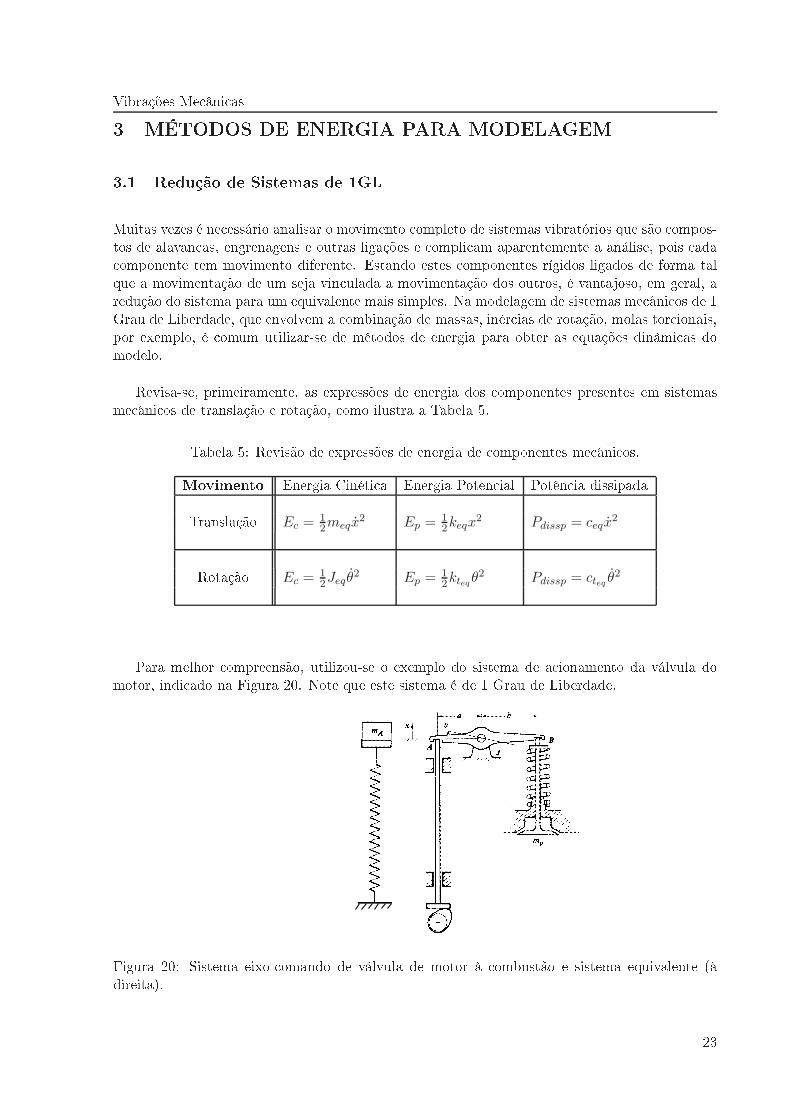
Para melhor ompreensão, utilizou-se o exemplo do sistema de a ionamento da válvula domotor, indi ado na Figura 20. Note que este sistema é de 1 Grau de Liberdade.
Figura 20: Sistema eixo- omando de válvula de motor à ombustão e sistema equivalente (àdireita). 23

Vibrações Me âni asPara pequenos deslo amentos (|θ| < 5◦) tem-se que cos(θ) ≈ 1 e sin(θ) ≈ 0. Os deslo amentosdos pontos A e B podem ser es ritos em função do deslo amento angular θ do balan im J , ouseja:x = a sin(θ) ⇒ x ≈ aθ e y = b sin(θ) ⇒ y ≈ bθEstas são as relações de ompatibilidade entre as oordenadas x-θ e entre y-θ. Com isto, adinâmi a do sistema aproxima-se da linear. Derivando a ima, obtém-se as velo idades dos pontos
A e B por:x = aθ y = bθ (7)Suponha que seja interessante on entrar toda inér ia do sistema em um omponente, ommovimento de rotação des rito pela oordenada de deslo amento angular θ. Neste aso deseja-seobter o valor da inér ia equivalente Jeq que onsiste em transportar as inér ias da haste
mh, da válvula mv e da mola mm ao balan im e adi ioná-las à sua inér ia J . Para realizar estepro edimento de redução, isto é, asso iação dos omponentes om inér ia, utiliza-se a expressãoda energia inéti a total do sistema dada pela soma das energias inéti as destes omponentes:Ec|total =
∑
i
Ec|iDepois iguala-se a energia total à energia inéti a de um úni a massa ou inér ia equivalente meqque faria o papel de todas as massas ou inér ias do sistema físi o:Ec|total = Ec|eq
=1
2meq ·
d
dt< oord(t) >Para o exemplo da Fig. 20, a energia inéti a total dos omponentes os ilantes do sistema é al ulada por:
Ec =1
2Jθ2 +
1
2mvy
2 +1
2mhx2 +
1
2
(mm
3
)
y2A redução para o movimento em θ(t) o orre om a substituição de x e y na expressão a imapelas expressões em função de θ dadas em (7). Logo, a energia Ec resulta em:Ec =
1
2
[
J + mha2 +(
mv +mm
3
)
b2]
︸ ︷︷ ︸
Jeq
θ2 =1
2Jeq θ
2
→ Jeq = J + mha2 +(
mv +mm
3
)
b2De forma semelhante, pode-se determinar a expressão damassa equivalente meq aso o sistemafosse reduzido para o movimento des rito pela oordenada de translação x(t), obtendo-seEc =
1
2
[
J + mha2 +(mv + mm
3
)b2
a2
]
︸ ︷︷ ︸
meq
x2 =1
2meqx
2
→ meq =J + mha2 +
(mv + mm
3
)b2
a2O mesmo pro edimento poderia ser realizado para redução à oordenada y(t). 24

Vibrações Me âni asUtiliza-se a expressão da energia poten ial Ep para a determinação da rigidez equivalentekeq. A energia poten ial total do sistema é
Ep =1
2kvy
2 +1
2khx2A redução da rigidez para o movimento om θ(t), obtém-se
Ep =1
2
[kvb
2 + kha2]
︸ ︷︷ ︸
keq
θ2 =1
2keqθ
2 → keq = kvb2 + kha2A redução da rigidez para o movimento om x(t), obtém-se
Ep =1
2
[
kvb2
a2+ kh
]
︸ ︷︷ ︸
keq
x2 =1
2keqx
2 → keq = kvb2
a2+ khQuando vários amorte edores estão presentes no sistema, a redução a um valor de amorte -imento equivalente ceq é realizada por meio da expressão da potên ia dissipada Pdiss.Considere o exemplo a seguir, Fig. 21. Neste exemplo, vários amorte edores são montadosem uma alavan a de omprimento l que os ila em torno do ponto O. Para o ál ulo da equação
Figura 21: Sistema amorte ido.dinâmi a de rotação da alavan a é ne essário determinar o amorte imento angular equivalente.Então, utiliza-se a expressão de potên ia dissipada:Pdiss = c1y
2 + c2x2 + c3x
2As relações de ompatibilidade para este aso são:y = aθ, z = bθ, x = lθReduzindo o amorte imento para o movimento da oordenada θ(t):
Pdiss =[c1a
2 + c2b2 + c3l
2]
︸ ︷︷ ︸
ceq
θ2 = ceq θ2 → ceq = c1a
2 + c2b2 + c3l
2A onstante de mola também pode ser obtida por pro edimento semelhante ao apontado noexemplo anterior. Assim, a energia poten ial total:Ep =
1
2kx2 25

Vibrações Me âni asReduzindo para θ(t), tem-se:Ep =
1
2kl2︸︷︷︸
keq
θ2 =1
2keqθ
2 → keq = kl2O momento de inér ia da barra, em relação ao entro de gravidade, é:JCG =
ml2
12Utilizando o Teorema dos Eixos Paralelos, ou T. de Steiner, obtém-se o momento de inér ia parao ponto O:JO = JCG + md2 → JO =
ml2
12+ m
(l
2
)2
=ml2
3Portanto, utilizando o momento de inér ia a ima, en ontra-se a equação de movimento para omovimento angular:(
ml2
3
)
θ(t) +(c1a
2 + c2b2 + c3l
2)θ(t) + kl2θ(t) = 03.2 Conservação da EnergiaAlém de apli ar a 2a Lei de Newton para obter a equação dinâmi a, pode-se utilizar tambémo método da onservação da energia. Neste método vale o seguinte postulado: �A soma dasenergias inéti a e poten ial para um sistema onservativo é igual a uma onstante desde quea energia total do sistema seja representada somente em função destes dois tipos de energia�.Sendo a energia total onstante, temos que a variação da energia é zero. Logo, para sistemas onservativos:
Etotal = Ec + Ep = cte → dEtotal(t)
dt=
d(Ec + Ep)
dt= 0 (8)Este método pode ser utilizado para sistemas em geral (não-lineares).Para efeito de omparação, no exemplo da massa-polia-mola a seguir, a equação dinâmi aserá obtida pelo TMB e também pelo método de energia a ima apresentado.Método de solução pelo TMB: a Figura 22 des reve a análise de orpo livre para o blo ode massa e para a polia. A massa do abo foi desprezada neste exemplo. O abo que sustentaa massa é o mesmo que está ligado à mola, portanto qualquer deslo amento da massa se re�eteem deformação para a mola. Pela �gura, tem-se y = rα.Por ausa da presença da a eleração gravidade g, a massa m se movimenta de δest. Como
m está ligada à polia por um �o inextensível, esta sofre um deslo amento angular (gira) de θest,onde δest = r θest. Após esta movimentação, na qual o sistema adquire uma nova posição deequilíbrio8, pode-se de�nir uma nova oordenada x para des rever a os ilação em torno destaposição de equilíbrio. Logo,y = δest + x → y = x
(
δest = 0)
α = θest + θ → α = θ(
θest = 0)8Deslo ada de δest em relação a origem da oordenada y. 26
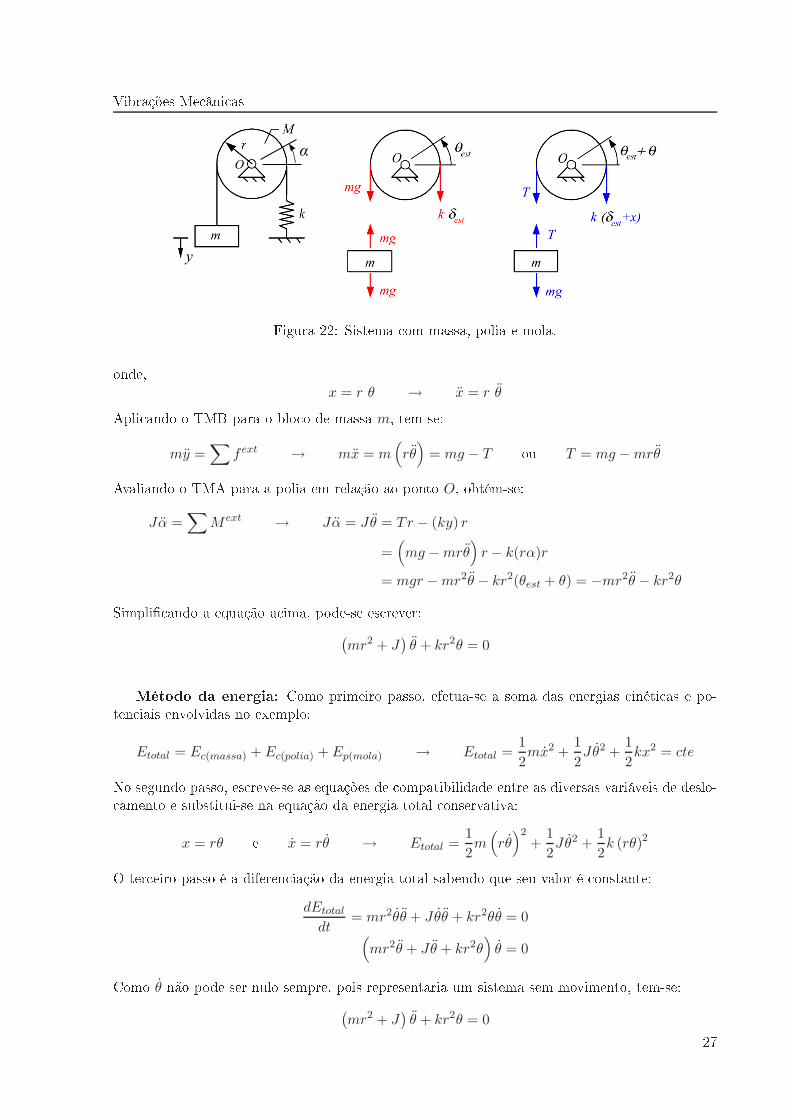
Vibrações Me âni asy
Oα
Figura 22: Sistema om massa, polia e mola.onde,x = r θ → x = r θApli ando o TMB para o blo o de massa m, tem-se:
my =∑
f ext → mx = m(
rθ)
= mg − T ou T = mg − mrθAvaliando o TMA para a polia em relação ao ponto O, obtém-se:Jα =
∑
Mext → Jα = Jθ = Tr − (ky) r
=(
mg − mrθ)
r − k(rα)r
= mgr − mr2θ − kr2(θest + θ) = −mr2θ − kr2θSimpli� ando a equação a ima, pode-se es rever:(mr2 + J
)θ + kr2θ = 0Método da energia: Como primeiro passo, efetua-se a soma das energias inéti as e po-ten iais envolvidas no exemplo:
Etotal = Ec(massa) + Ec(polia) + Ep(mola) → Etotal =1
2mx2 +
1
2Jθ2 +
1
2kx2 = cteNo segundo passo, es reve-se as equações de ompatibilidade entre as diversas variáveis de deslo- amento e substitui-se na equação da energia total onservativa:
x = rθ e x = rθ → Etotal =1
2m(
rθ)2
+1
2Jθ2 +
1
2k (rθ)2O ter eiro passo é a diferen iação da energia total sabendo que seu valor é onstante:
dEtotal
dt= mr2θθ + Jθθ + kr2θθ = 0(
mr2θ + Jθ + kr2θ)
θ = 0Como θ não pode ser nulo sempre, pois representaria um sistema sem movimento, tem-se:(mr2 + J
)θ + kr2θ = 0 27

Vibrações Me âni asPor �m, pode-se al ular a frequên ia natural não-amorte ida do sistema massa-polia-mola:ωn =
√
kr2
J + mr2Exemplo: Pretende-se determinar a equação dinâmi a do pêndulo simples om massa m naextremidade da haste de omprimento l. Como pro edimento de modelagem, admite-se que amassa tem dimensões reduzidas em relação ao omprimento da haste. Além disto, a massa dahaste é desprezível quando omparado à massa m.
Figura 23: Pêndulo simples.Primeiro passo: Expressão da energia total:Etotal = Ec + Ep(gravitacional)
=1
2JO θ2 + mgl(1 − cos(θ)) = cteSegundo passo: A equação de ompatibilidade não é ne essária, pois o sistema está todo es ritoem função de θ.Ter eiro passo: Diferen iação da equação de energia:
dEtotal
dt= JO θθ + mgl sin(θ)θ = 0ou, omo θ 6= 0, segue que
JO θ + mgl sin(θ) = 0O momento de inér ia do pêndulo é es rito na forma:JO = ml2Portanto,
ml2θ + mgl sin(θ) = 0 → θ +g
lsin(θ) = 0A equação obtida é uma equação diferen ial não-linear. Entretanto, apli amos uma simpli� ação,admitindo que o pêndulo os ile om pequenos ângulos. Para ondições ini iais que façam opêndulo os ilar om pequenos ângulos, sin(θ) ≈ θ, tem-se:
θ +g
lθ = 0, onde ωn =
√g
l 28

Vibrações Me âni as3.3 Equação da Energia para Sistemas DissipativosPara sistemas não- onservativos (dissipativos), pode-se modi� ar o método a ima para ontem-plar a taxa de energia dissipada por amorte edores e enun iar a seguinte expressão:dEtotal(t)
dt= −Pdiss(t) (9)Note que Pdiss é a potên ia total dissipada no sistema.Exemplo: Na Figura 24, uma barra rígida de massa m, omprimento l e seção transversaluniforme, é arti ulada no ponto O e suportada por uma mola.
Figura 24: Sistema amorte ido.Primeiro passo: Expressão da energia total:Etotal = Ec(barra) + Ep(mola) → Etotal =
1
2JO θ2 +
1
2kx2 = cteSegundo passo: Equação de ompatibilidade entre os deslo amentos:
x = aθ → Etotal =1
2JO θ2 +
1
2k (aθ)2Ter eiro passo: Diferen iação da equação de energia:
dEtotal
dt= JO θθ + ka2θθ =
(
JO θ + ka2θ)
θCaso o sistema da Fig. 24 não tivesse o amorte edor c, a resolução terminaria om a apli açãode (8). Entretanto, om a presença de c no sistema, a energia me âni a não se onserva, sendone essário ontinuar a resolução om apli ação de (9).Quarto passo: A potên ia dissipada pelo sistema é obtida por:Pdiss = cx2 → Pdiss = cl2θ2Logo, igualando as expressões a ima, onforme (9) e simpli� ando θ, tem-se
dEtotal
dt= −Pdiss → JO θ + cl2θ + ka2θ = 0Como visto anteriormente o momento de inér ia da barra em relação ao ponto O é:
JO =ml2
3Finalmente, tem-se:ml2
3θ + cl2θ + ka2θ = 0, onde ωn =
√
3ka2
ml2 29
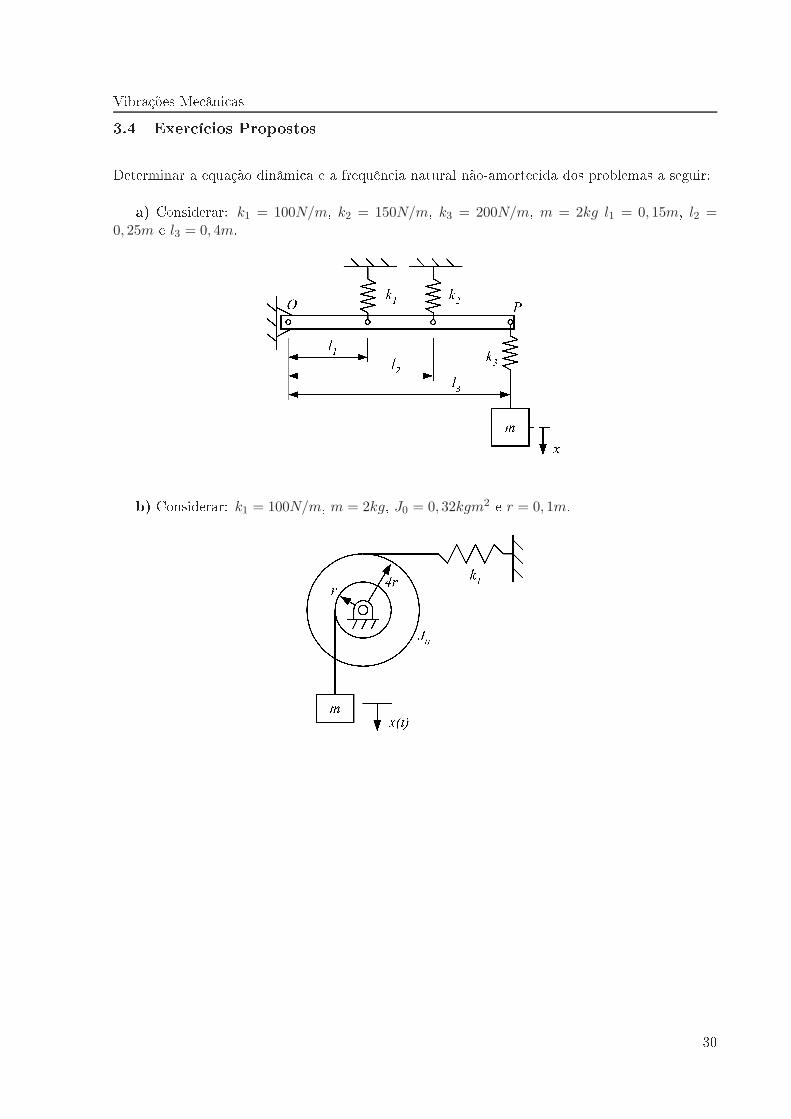
Vibrações Me âni as3.4 Exer í ios PropostosDeterminar a equação dinâmi a e a frequên ia natural não-amorte ida dos problemas a seguir:a) Considerar: k1 = 100N/m, k2 = 150N/m, k3 = 200N/m, m = 2kg l1 = 0, 15m, l2 =0, 25m e l3 = 0, 4m.
b) Considerar: k1 = 100N/m, m = 2kg, J0 = 0, 32kgm2 e r = 0, 1m.
30

Vibrações Me âni as4 VIBRAÇ�O COM EXCITAÇ�O HARMÔNICA4.1 Equação Diferen ial ForçadaUma força variável atua no modelo massa-mola-amorte edor da Figura 25:
Figura 25: Sistema sob forçante harm�ni a e seu DCL.A força externa F (t) é harm�ni a pois é dada por uma função trigonométri a F (t) =F0 cos(ωt), onde ω é a frequên ia de trabalho ou de ex itação.Como a equação diferen ial de um sistema forçado é não-homogênea, sua solução total x(t)é dado pela soma das seguintes omponentes, Fig. 26:Solução Homogênea xh(t) - transiente ou vibração livreSolução Parti ular xp(t) - estado esta ionário ou vibração em regime.A solução homogênea xh(t), foi dis utida no apítulo 1, pois orresponde a um movimentolivre, obtida sem a presença de força F (t). Observe também que, em sistemas amorte idos,a solução xh(t) tende a zero e, após um intervalo de tempo de transitório, apenas a soluçãoparti ular xp(t) persiste.4.2 Vibração Forçada de Sistemas Não-Amorte idosSe a mesma força harm�ni a atua sobre a massa do sistema sem amorte imento, a equaçãodinâmi a do movimento é:
mx + kx = F0 cos(ωt)A solução parti ular xp(t) para o deslo amento é harm�ni a e tem a mesma frequên ia da força:xp(t) = X0 cos(ωt)Na solução parti ular a ima, X0 representa a amplitude de xp(t). Derivando a expressão esubstituindo na equação dinâmi a do movimento, obtém-se:
m[−ω2X0 cos(ωt)
]+ k [X0 cos(ωt)] = F0 cos(ωt) 31
Vibrações Me âni as
Figura 26: Componentes da solução total x(t) = xh(t) + xp(t).Resolvendo para X0, segue que:X0 =
F0
k − mω2Dividindo-se o numerador e denominador por k e de�nindo-se a razão de frequên ias r = ω/ωne a deformação estáti a Xest = F0/k, tem-se:X0 =
Xest
1 − r2, onde r =
ω
ωn
, Xest =F0
kA solução homogênea para vibração livre e não-amorte ida, demonstrada no apítulo 1, é:xh(t) = A1 cos(ωnt) + A2 sin(ωnt)Somando as duas soluções a ima, a solução total x(t) torna-se então:
x(t) = xh(t) + xp(t) = A1 cos(ωnt) + A2 sin(ωnt) +Xest
1 − r2cos(ωt)Usando as ondições de ontorno para t = 0, ou seja, x0 = x(0) e v0 = x(0), obtém-se:
A1 = x0 −Xest
1 − r2e A2 =
v0
ωnAssim,x(t) =
(v0
ωn
)
sin(ωnt) +
(
x0 −Xest
1 − r2
)
cos(ωnt) +Xest
1 − r2cos(ωt)No exemplo da �gura abaixo emprega-se a solução a ima em um sistema sem amorte imento om os seguintes parâmetros: ωn = 1rad/s, ω = 2rad/s, Xest = 0, 02m, e ondições ini iais
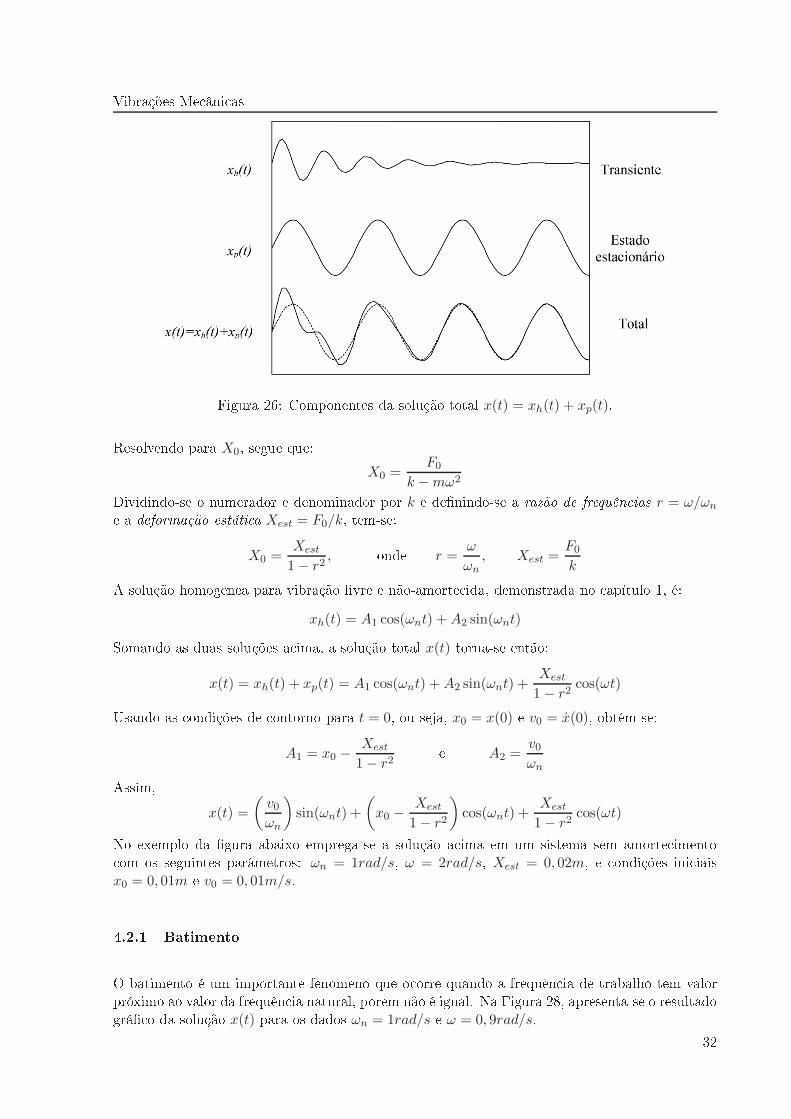
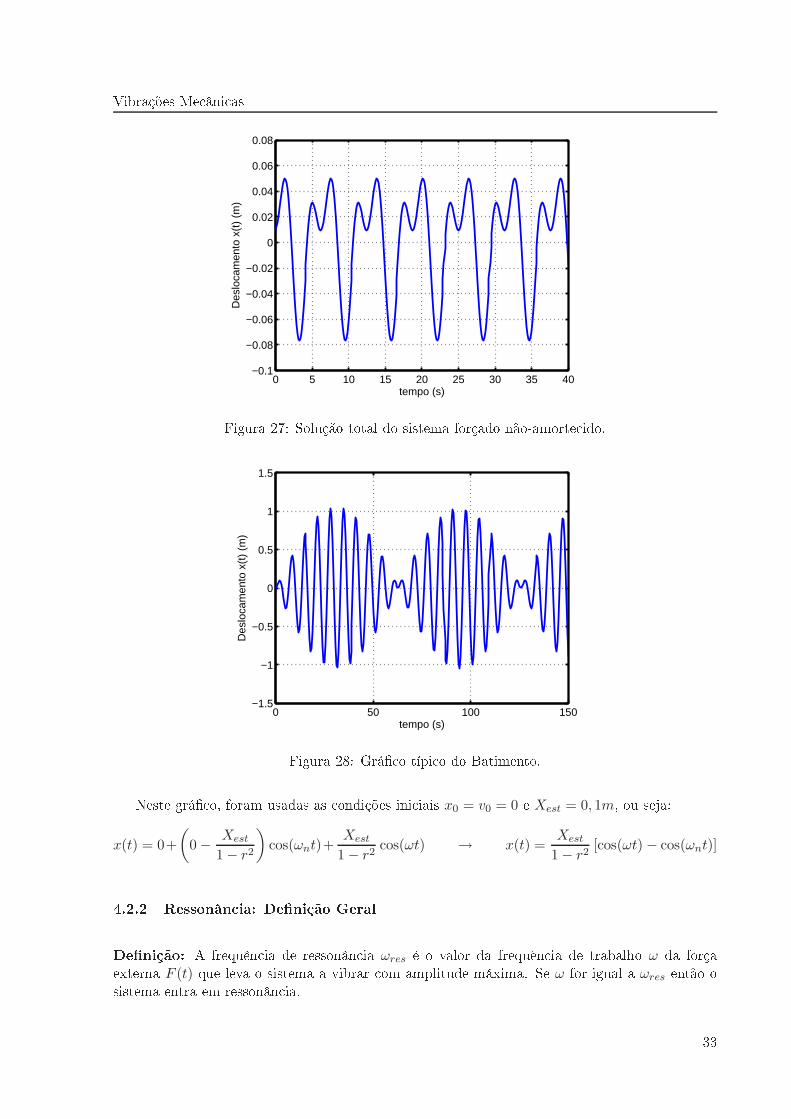
x0 = 0, 01m e v0 = 0, 01m/s.4.2.1 BatimentoO batimento é um importante fen�meno que o orre quando a frequên ia de trabalho tem valorpróximo ao valor da frequên ia natural, porem não é igual. Na Figura 28, apresenta-se o resultadográ� o da solução x(t) para os dados ωn = 1rad/s e ω = 0, 9rad/s. 32
Vibrações Me âni as
0 5 10 15 20 25 30 35 40−0.1
−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
tempo (s)
Des
loca
men
to x
(t)
(m)
Figura 27: Solução total do sistema forçado não-amorte ido.
0 50 100 150−1.5
−1
−0.5
0
0.5
1
1.5
tempo (s)
Des
loca
men
to x
(t)
(m)
Figura 28: Grá� o típi o do Batimento.Neste grá� o, foram usadas as ondições ini iais x0 = v0 = 0 e Xest = 0, 1m, ou seja:x(t) = 0+
(
0 − Xest
1 − r2
)
cos(ωnt)+Xest
1 − r2cos(ωt) → x(t) =
Xest
1 − r2[cos(ωt) − cos(ωnt)]4.2.2 Ressonân ia: De�nição GeralDe�nição: A frequên ia de ressonân ia ωres é o valor da frequên ia de trabalho ω da forçaexterna F (t) que leva o sistema a vibrar om amplitude máxima. Se ω for igual a ωres então osistema entra em ressonân ia. 33
Vibrações Me âni as4.2.3 Ressonân ia para ζ = 0Dis ute-se a seguir, a determinação do valor de ωres para o aso não-amorte ido (ζ = 0).Quando a frequên ia de trabalho ω tem valor igual ao da frequên ia natural ωn, em sistemassem amorte imento, o orre o fen�meno de ressonân ia, onde a amplitude do movimento res einde�nidamente. Para a análise da ressonân ia, om ζ = 0, pode-se utilizar a expressão anterior om as ondições ini iais x0 = 0 e v0 = 0. Se ω → ωn, então r → 1 e a expressão do limite aseguir tem resultado inde�nido. Apli a-se, então, a regra de L'Hospital para avaliar o limite daamplitude:lim
ω→ωn
Xest
cos(ωt) − cos(ωnt)
1 −(
ωωn
)2
= lim
ω→ωn
Xest
ddω
[cos(ωt) − cos(ωnt)]
ddω
(
1 − ω2
ω2n
)
= limω→ωn
[
Xestt sin(ωt)
2 ωω2
n
]
=Xestωn
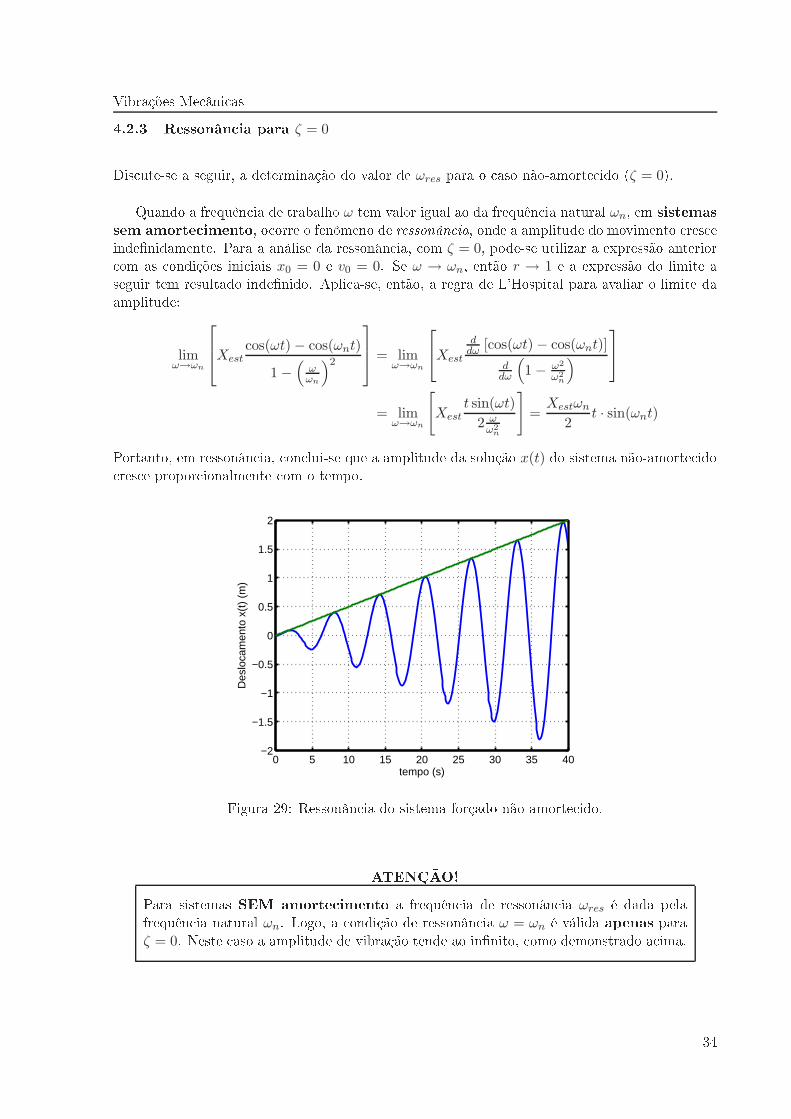
2t · sin(ωnt)Portanto, em ressonân ia, on lui-se que a amplitude da solução x(t) do sistema não-amorte ido res e propor ionalmente om o tempo.
0 5 10 15 20 25 30 35 40−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
tempo (s)
Des
loca
men
to x
(t)
(m)
Figura 29: Ressonân ia do sistema forçado não-amorte ido.ATENÇ�O!Para sistemas SEM amorte imento a frequên ia de ressonân ia ωres é dada pelafrequên ia natural ωn. Logo, a ondição de ressonân ia ω = ωn é válida apenas paraζ = 0. Neste aso a amplitude de vibração tende ao in�nito, omo demonstrado a ima.
34

Vibrações Me âni as4.3 Vibração Forçada de Sistemas Amorte idosA equação dinâmi a do sistema amorte ido sujeito a forçante F (t) é:mx + cx + kx = F0 cos(ωt)A solução parti ular xp(t) para o deslo amento é harm�ni a e tem a mesma frequên ia da força:
xp(t) = X0 cos(ωt − φ)onde X0 e φ representam, respe tivamente, a amplitude e o ângulo de fase da solução parti ular.Substituindo esta solução na equação de movimento, obtém-se:X0
(k − mω2
)cos(ωt − φ) − X0cω sin(ωt − φ) = F0 cos(ωt) (10)Após algumas manipulações algébri as9, as onstantes X0 e φ são determinadas omo:
X0 =F0
√
(k − mω2)2 + (cω)2e φ = arctan
(c ω
k − mω2
) (11)A análise destas expressões é fa ilitada quando divide-se numerador e denominador por k. Re- uperando as de�nições de r, Xest e do fator de amorte imento ζ:r =
ω
ωn
, Xest =F0
k,
c
k=
2ζmωn
k=
2ζ
ωn
,pode-se determinar X0 e φ omo função de r e ζ:X0 =
Xest√
(1 − r2)2 + (2ζr)2e φ = arctan
(2ζ r
1 − r2
) (12)A solução parti ular xp é es rita na forma:xp(t) =
Xest√
(1 − r2)2 + (2ζr)2cos
[
ωt − arctan
(2ζ r
1 − r2
)]Na Figura 30, observa-se os grá� os de F (t) e xp(t) em função de ωt. À direita, pode-se veri� arum grá� o polar que ilustra o ângulo de fase φ entre os fasores de F (t) e xp(t).Neste aso, a solução total x(t) é obtida novamente omo a soma da solução homogênea xh(t)e da solução parti ular xp(t), ou seja:x(t) = xh(t) + xp(t)
= Ahe−ζωnt cos(ωat − φh) + X0 cos(ωt − φ)9Com o auxílio das identidades trigonométri as da soma de dois ângulos abaixosin(ωt − φ) = sin(ωt) cos(φ) − sin(φ) cos(ωt)
cos(ωt − φ) = cos(ωt) cos(φ) + sin(φ) sin(ωt)pode-se de ompor a expressão (10) em duas expressões independentes; uma em função de sin(ωt) e outra funçãode cos(ωt):X0
[(k − mω2
)cos(φ) + cω sin(φ)
]= F0
X0
[(k − mω2
)sin(φ) − cω cos(φ)
]= 0 35
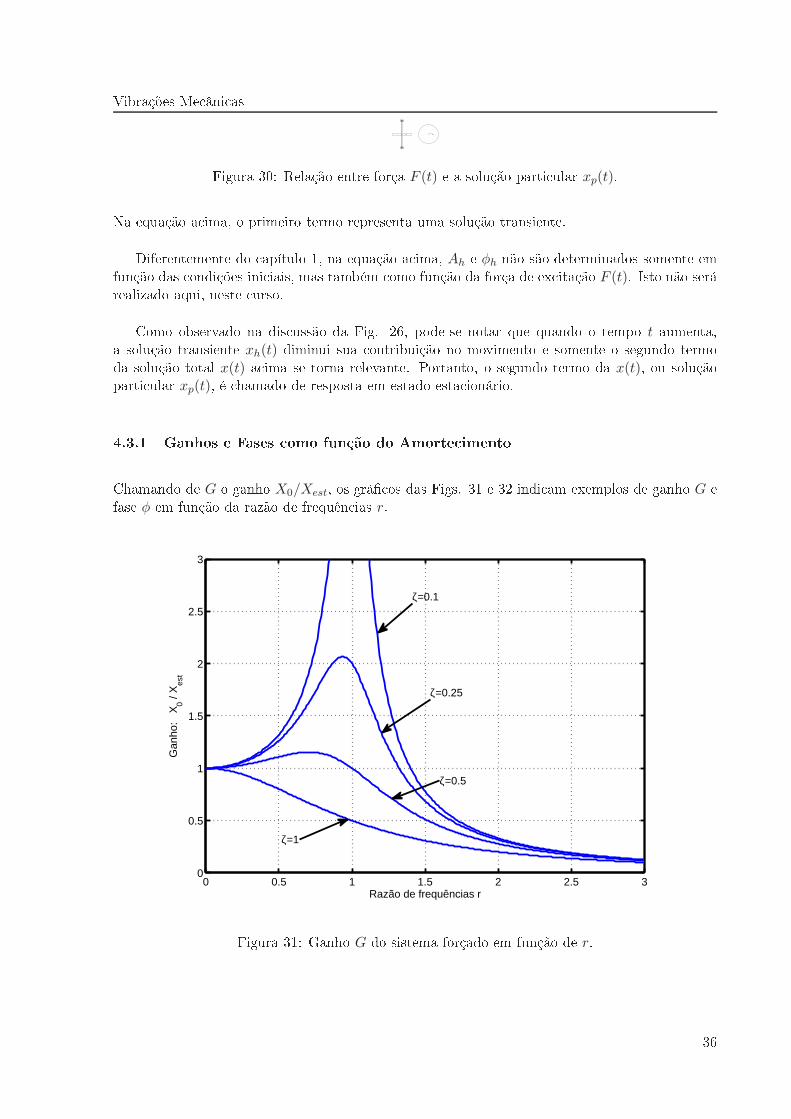
Vibrações Me âni asFigura 30: Relação entre força F (t) e a solução parti ular xp(t).Na equação a ima, o primeiro termo representa uma solução transiente.Diferentemente do apítulo 1, na equação a ima, Ah e φh não são determinados somente emfunção das ondições ini iais, mas também omo função da força de ex itação F (t). Isto não serárealizado aqui, neste urso.Como observado na dis ussão da Fig. 26, pode-se notar que quando o tempo t aumenta,a solução transiente xh(t) diminui sua ontribuição no movimento e somente o segundo termoda solução total x(t) a ima se torna relevante. Portanto, o segundo termo da x(t), ou soluçãoparti ular xp(t), é hamado de resposta em estado esta ionário.4.3.1 Ganhos e Fases omo função do Amorte imentoChamando de G o ganho X0/Xest, os grá� os das Figs. 31 e 32 indi am exemplos de ganho G efase φ em função da razão de frequên ias r.
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
3
Razão de frequências r
Gan
ho:
X0 /
Xes
t
ζ=0.1
ζ=0.25
ζ=0.5
ζ=1
Figura 31: Ganho G do sistema forçado em função de r.36
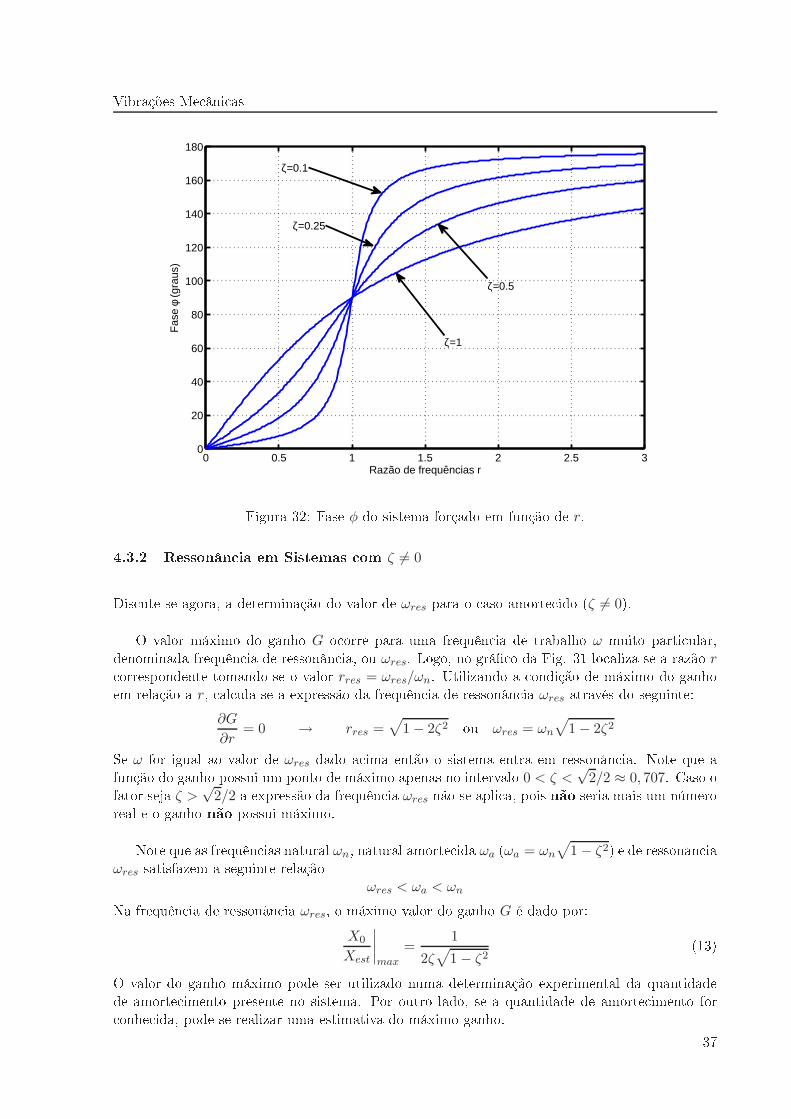
Vibrações Me âni as
0 0.5 1 1.5 2 2.5 30
20
40
60
80
100
120
140
160
180
Razão de frequências r
Fas
e φ
(gra
us)
ζ=0.1
ζ=0.25
ζ=0.5
ζ=1
Figura 32: Fase φ do sistema forçado em função de r.4.3.2 Ressonân ia em Sistemas om ζ 6= 0Dis ute-se agora, a determinação do valor de ωres para o aso amorte ido (ζ 6= 0).O valor máximo do ganho G o orre para uma frequên ia de trabalho ω muito parti ular,denominada frequên ia de ressonân ia, ou ωres. Logo, no grá� o da Fig. 31 lo aliza-se a razão r orrespondente tomando-se o valor rres = ωres/ωn. Utilizando a ondição de máximo do ganhoem relação a r, al ula-se a expressão da frequên ia de ressonân ia ωres através do seguinte:∂G
∂r= 0 → rres =
√
1 − 2ζ2 ou ωres = ωn
√
1 − 2ζ2Se ω for igual ao valor de ωres dado a ima então o sistema entra em ressonân ia. Note que afunção do ganho possui um ponto de máximo apenas no intervalo 0 < ζ <√
2/2 ≈ 0, 707. Caso ofator seja ζ >√
2/2 a expressão da frequên ia ωres não se apli a, pois não seria mais um númeroreal e o ganho não possui máximo.Note que as frequên ias natural ωn, natural amorte ida ωa (ωa = ωn
√
1 − ζ2) e de ressonân iaωres satisfazem a seguinte relação
ωres < ωa < ωnNa frequên ia de ressonân ia ωres, o máximo valor do ganho G é dado por:X0
Xest
∣∣∣∣max
=1
2ζ√
1 − ζ2(13)O valor do ganho máximo pode ser utilizado numa determinação experimental da quantidadede amorte imento presente no sistema. Por outro lado, se a quantidade de amorte imento for onhe ida, pode-se realizar uma estimativa do máximo ganho. 37
Vibrações Me âni as ATENÇ�O!A frequên ia de ressonân ia ωres para sistemas COM amorte imento, ou seja, ζ 6= 0,é ωn
√
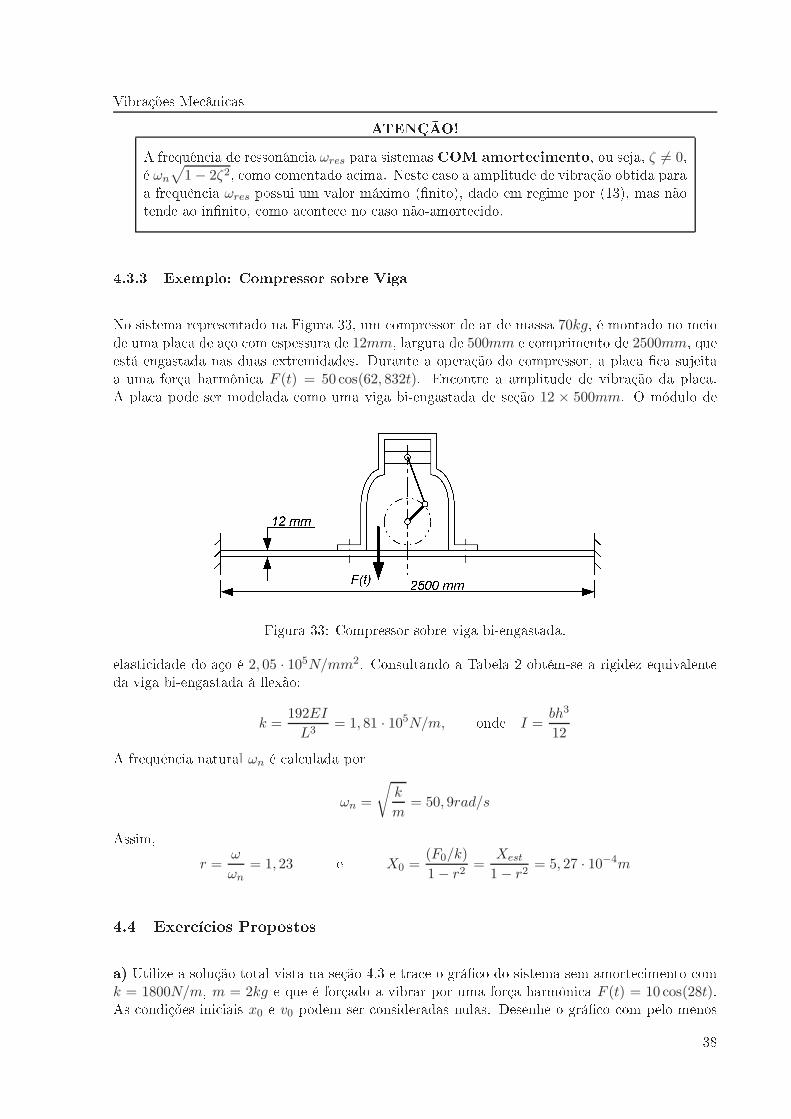
1 − 2ζ2, omo omentado a ima. Neste aso a amplitude de vibração obtida paraa frequên ia ωres possui um valor máximo (�nito), dado em regime por (13), mas nãotende ao in�nito, omo a onte e no aso não-amorte ido.4.3.3 Exemplo: Compressor sobre VigaNo sistema representado na Figura 33, um ompressor de ar de massa 70kg, é montado no meiode uma pla a de aço om espessura de 12mm, largura de 500mm e omprimento de 2500mm, queestá engastada nas duas extremidades. Durante a operação do ompressor, a pla a � a sujeitaa uma força harm�ni a F (t) = 50 cos(62, 832t). En ontre a amplitude de vibração da pla a.A pla a pode ser modelada omo uma viga bi-engastada de seção 12 × 500mm. O módulo de
Figura 33: Compressor sobre viga bi-engastada.elasti idade do aço é 2, 05 · 105N/mm2. Consultando a Tabela 2 obtém-se a rigidez equivalenteda viga bi-engastada à �exão:k =
192EI
L3= 1, 81 · 105N/m, onde I =
bh3
12A frequên ia natural ωn é al ulada porωn =
√
k
m= 50, 9rad/sAssim,
r =ω
ωn= 1, 23 e X0 =
(F0/k)
1 − r2=
Xest
1 − r2= 5, 27 · 10−4m4.4 Exer í ios Propostosa) Utilize a solução total vista na seção 4.3 e tra e o grá� o do sistema sem amorte imento om
k = 1800N/m, m = 2kg e que é forçado a vibrar por uma força harm�ni a F (t) = 10 cos(28t).As ondições ini iais x0 e v0 podem ser onsideradas nulas. Desenhe o grá� o om pelo menos38
Vibrações Me âni as20 períodos ompletos. Neste aso, qual é o intervalo mínimo de tempo (resolução) que deve ser onsiderado para traçar o grá� o?b) Com os mesmos dados do problema anterior, tra e o grá� o quando F (t) = 10 cos(ωrest),ou seja, quando a frequên ia de trabalho for igual a natural não-amorte ida. Desenvolva, também,este traçado om pelo menos 20 períodos.
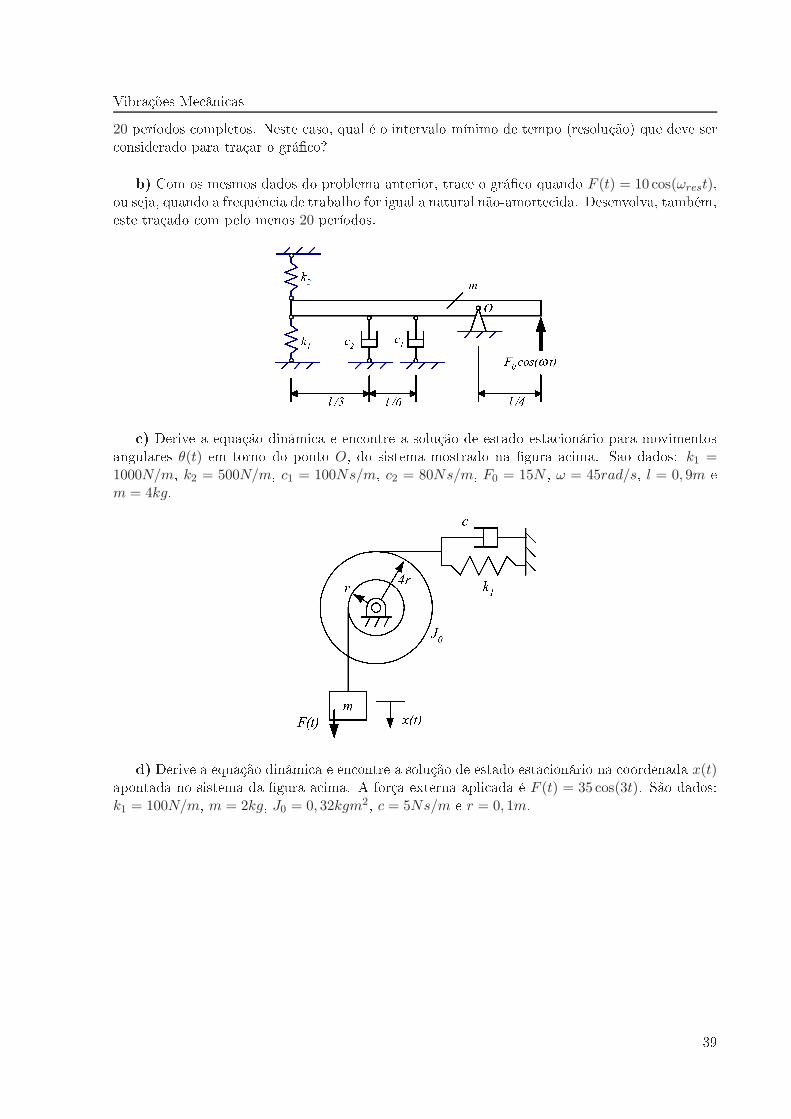
) Derive a equação dinâmi a e en ontre a solução de estado esta ionário para movimentosangulares θ(t) em torno do ponto O, do sistema mostrado na �gura a ima. Sao dados: k1 =1000N/m, k2 = 500N/m, c1 = 100Ns/m, c2 = 80Ns/m, F0 = 15N , ω = 45rad/s, l = 0, 9m em = 4kg.
d) Derive a equação dinâmi a e en ontre a solução de estado esta ionário na oordenada x(t)apontada no sistema da �gura a ima. A força externa apli ada é F (t) = 35 cos(3t). São dados:k1 = 100N/m, m = 2kg, J0 = 0, 32kgm2, c = 5Ns/m e r = 0, 1m.
39
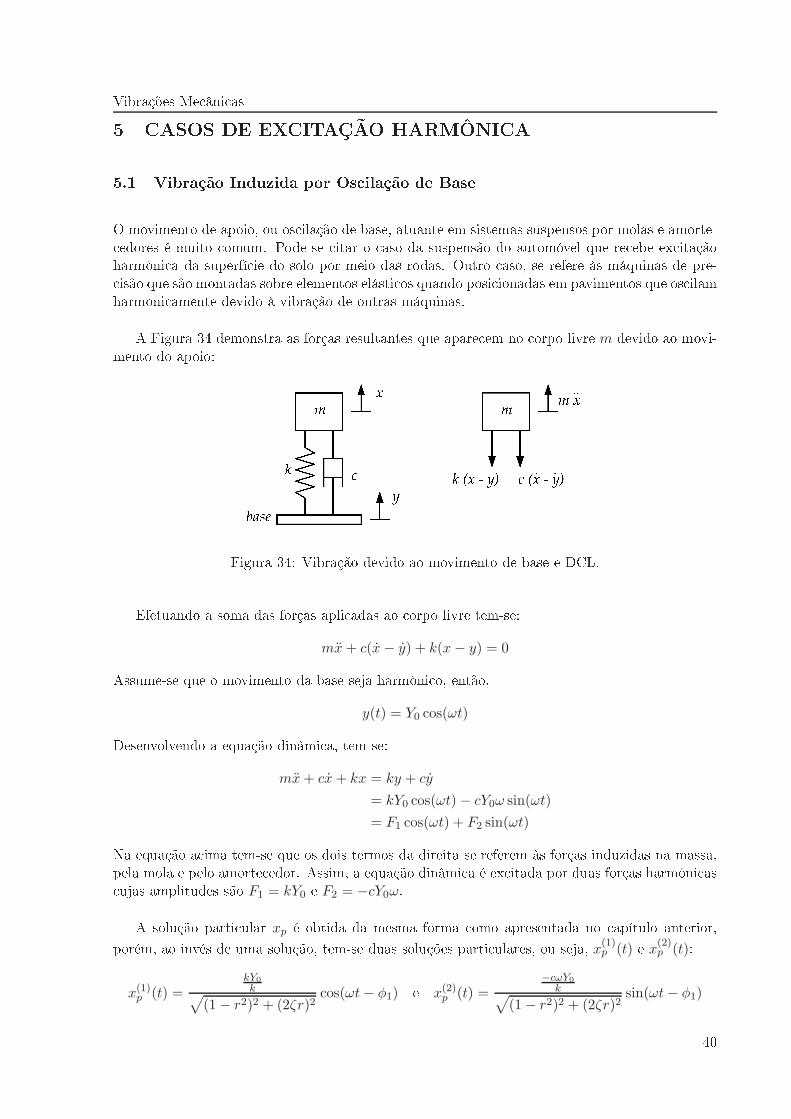
Vibrações Me âni as5 CASOS DE EXCITAÇ�O HARMÔNICA5.1 Vibração Induzida por Os ilação de BaseO movimento de apoio, ou os ilação de base, atuante em sistemas suspensos por molas e amorte- edores é muito omum. Pode-se itar o aso da suspensão do automóvel que re ebe ex itaçãoharm�ni a da superfí ie do solo por meio das rodas. Outro aso, se refere às máquinas de pre- isão que são montadas sobre elementos elásti os quando posi ionadas em pavimentos que os ilamharmoni amente devido à vibração de outras máquinas.A Figura 34 demonstra as forças resultantes que apare em no orpo livre m devido ao movi-mento do apoio:
Figura 34: Vibração devido ao movimento de base e DCL.Efetuando a soma das forças apli adas ao orpo livre tem-se:mx + c(x − y) + k(x − y) = 0Assume-se que o movimento da base seja harm�ni o, então,
y(t) = Y0 cos(ωt)Desenvolvendo a equação dinâmi a, tem-se:mx + cx + kx = ky + cy
= kY0 cos(ωt) − cY0ω sin(ωt)
= F1 cos(ωt) + F2 sin(ωt)Na equação a ima tem-se que os dois termos da direita se referem às forças induzidas na massa,pela mola e pelo amorte edor. Assim, a equação dinâmi a é ex itada por duas forças harm�ni as ujas amplitudes são F1 = kY0 e F2 = −cY0ω.A solução parti ular xp é obtida da mesma forma omo apresentada no apítulo anterior,porém, ao invés de uma solução, tem-se duas soluções parti ulares, ou seja, x(1)p (t) e x
(2)p (t):
x(1)p (t) =
kY0k
√
(1 − r2)2 + (2ζr)2cos(ωt − φ1) e x(2)
p (t) =−cωY0
k√
(1 − r2)2 + (2ζr)2sin(ωt − φ1)40
Vibrações Me âni asSimpli� ando a solução a ima, tem-se:x(1)
p (t) =Y0
√
(1 − r2)2 + (2ζr)2cos(ωt − φ1) e x(2)
p (t) =−2ζrY0
√
(1 − r2)2 + (2ζr)2sin(ωt − φ1)onde φ1 é a fase que o orre entre o deslo amento da base e os deslo amentos x(1)p (t) e x
(2)p (t).Esta fase o orre devido a presença de amorte imento no sistema ex itado harmoni amente e é al ulada por:
φ1 = arctan
(c ω
k − mω2
)Pelo prin ípio da superposição linear, o resultado �nal para a solução parti ular é:xp(t) = x(1)
p (t) + x(2)p (t)onde
xp(t) = Y0
√
1 + (2ζr)2√
(1 − r2)2 + (2ζr)2︸ ︷︷ ︸
X0
cos(ωt − φ1 − φ2)A nova fase φ2 se deve a soma vetorial de x(1)p (t) e x
(2)p (t), que são funções ortogonais.10 Aamplitude da solução parti ular X0 e a fase φ2 são:
X0 = Y0
√
1 + (2ζr)2√
(1 − r2)2 + (2ζr)2e φ2 = arctan(−2ζr)A razão X0 / Y0 é hamada de transmissibilidade de deslo amento e é usada para des rever omoo movimento da base é transmitido para a massa em função da frequên ia.
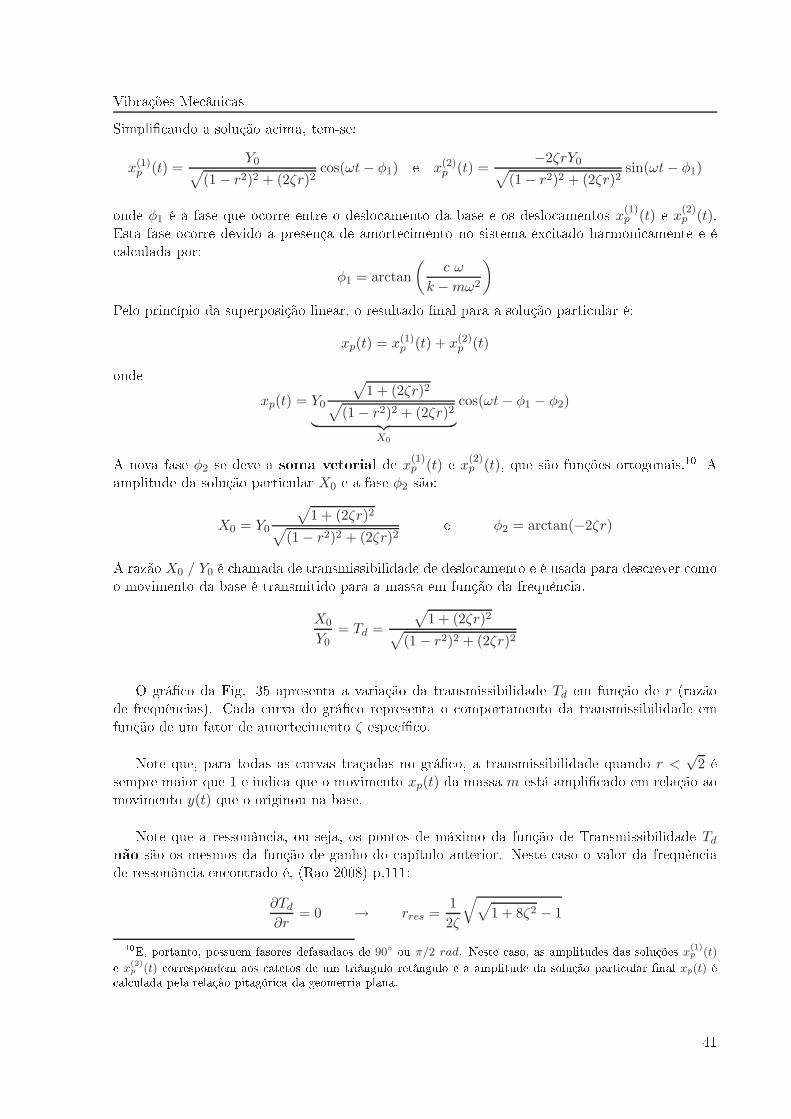
X0
Y0= Td =
√
1 + (2ζr)2√
(1 − r2)2 + (2ζr)2O grá� o da Fig. 35 apresenta a variação da transmissibilidade Td em função de r (razãode frequên ias). Cada urva do grá� o representa o omportamento da transmissibilidade emfunção de um fator de amorte imento ζ espe í� o.Note que, para todas as urvas traçadas no grá� o, a transmissibilidade quando r <√
2 ésempre maior que 1 e indi a que o movimento xp(t) da massa m está ampli� ado em relação aomovimento y(t) que o originou na base.Note que a ressonân ia, ou seja, os pontos de máximo da função de Transmissibilidade Tdnão são os mesmos da função de ganho do apítulo anterior. Neste aso o valor da frequên iade ressonân ia en ontrado é, (Rao 2008) p.111:∂Td
∂r= 0 → rres =
1
2ζ
√√
1 + 8ζ2 − 110E, portanto, possuem fasores defasadaos de 90◦ ou π/2 rad. Neste aso, as amplitudes das soluções x(1)p (t)e x
(2)p (t) orrespondem aos atetos de um triângulo retângulo e a amplitude da solução parti ular �nal xp(t) é al ulada pela relação pitagóri a da geometria plana. 41
Vibrações Me âni as
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
3
Razão de frequências r
Tra
nsm
issi
bilid
ade:
Td =
X0 /
Y 0ζ=0.1
ζ=0.25
ζ=0.5ζ=1
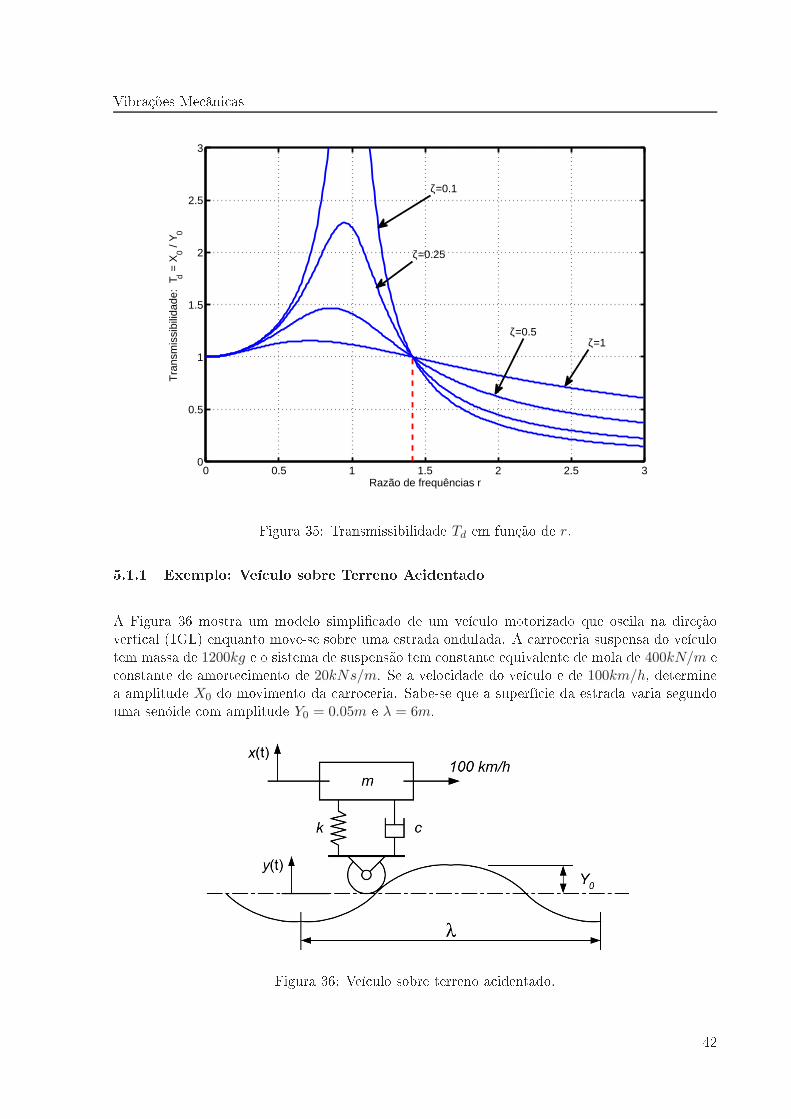
Figura 35: Transmissibilidade Td em função de r.5.1.1 Exemplo: Veí ulo sobre Terreno A identadoA Figura 36 mostra um modelo simpli� ado de um veí ulo motorizado que os ila na direçãoverti al (1GL) enquanto move-se sobre uma estrada ondulada. A arro eria suspensa do veí ulotem massa de 1200kg e o sistema de suspensão tem onstante equivalente de mola de 400kN/m e onstante de amorte imento de 20kNs/m. Se a velo idade do veí ulo e de 100km/h, determinea amplitude X0 do movimento da arro eria. Sabe-se que a superfí ie da estrada varia segundouma senóide om amplitude Y0 = 0.05m e λ = 6m.
Figura 36: Veí ulo sobre terreno a identado. 42

Vibrações Me âni asNo modelo simpli� ado de 1GL tem-se que o movimento verti al da arro eria é ausadopelo movimento das rodas do veí ulo. A ex itação harm�ni a, neste aso, apare e na forma dodeslo amento das rodas e se transforma em forças atuantes na arro eria por meio das molas eamorte edores. A frequên ia natural do modelo é:ωn =
√
k
m= 18, 3rad/sO fator de amorte imento é al ulado por:
ζ =c
2mωn
= 0, 46Se a velo idade é 100km/h, então,v =
∆x
∆t=
λ
T→ T =
6
100/3, 6= 0, 216s → ω =
2π
T= 29rad/s → r =
ω
ωn
= 1, 6O valor da transmissibilidade Td éTd =
X0
Y0= 0, 83 → X0 = Y0 · Td = 0, 0415m5.2 Máquinas Rotativas om Desbalan eamentoÉ muito omum a existên ia de máquinas om eixos rotativos. Por sua vez, pequenas irregular-idades na distribuição de massas rotativas destes eixos, quando em movimento, podem ausarvibrações devido ao desbalan eamento rotativo.A Figura 37 apresenta um esquema do desbalan eamento rotativo de uma máquina.
Figura 37: Desbalan eamento rotativo.A força entrífuga de desbalan eamento Fdesb(t) é obtida pela expressão:Fdesb(t) = mdeω
2
︸ ︷︷ ︸
F0
cos(ωt) 43
Vibrações Me âni asNa expressão a ima, md é a massa rotativa de desbalan eamento, e é a ex entri idade destamassa e ω é a velo idade angular do sistema rotativo da máquina. A equação de movimento doproblema a ima, in luindo o amorte imento na suspensão da máquina, é dada por:mx + cx + kx = mdeω
2 cos(ωt)A solução parti ular desta equação é semelhante à expressão apresentada na seção 4.3, ou seja,xp(t) = X0 cos(ωt − φ)sendo para esta última:
X0 =mdeω
2/k√
(1 − r2)2 + (2ζr)2e φ = arctan
(2ζ r
1 − r2
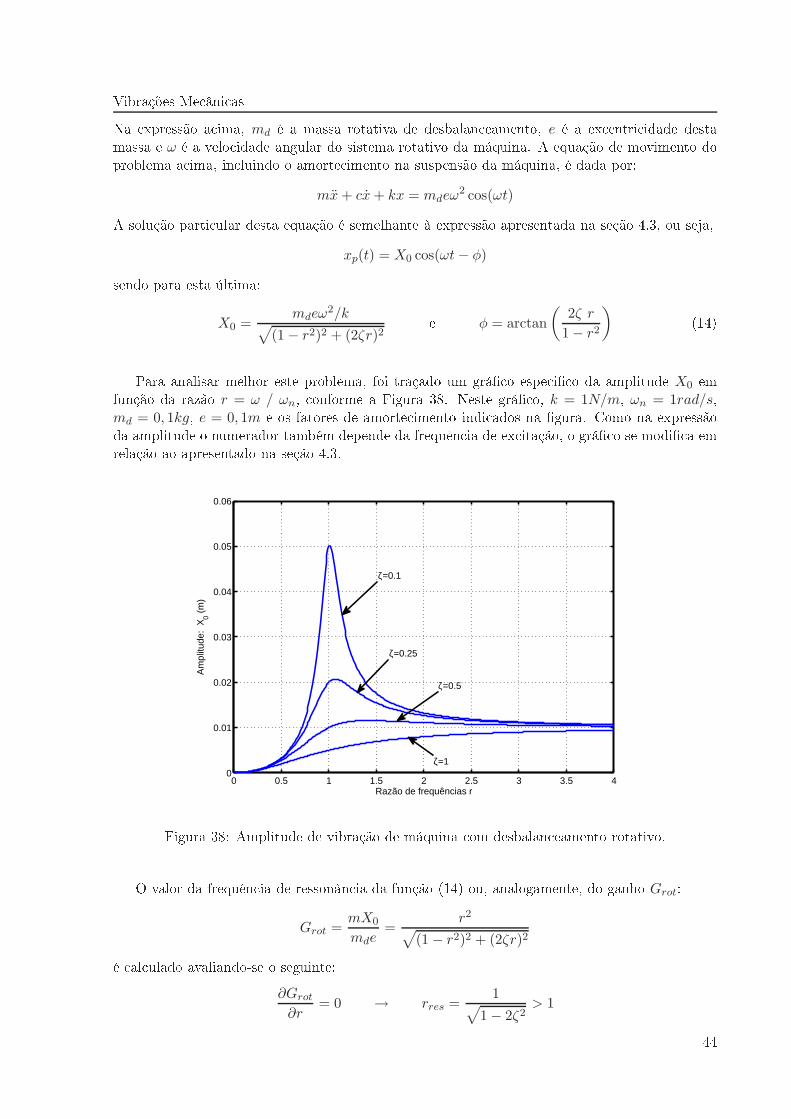
) (14)Para analisar melhor este problema, foi traçado um grá� o espe i� o da amplitude X0 emfunção da razão r = ω / ωn, onforme a Figura 38. Neste grá� o, k = 1N/m, ωn = 1rad/s,md = 0, 1kg, e = 0, 1m e os fatores de amorte imento indi ados na �gura. Como na expressãoda amplitude o numerador também depende da frequên ia de ex itação, o grá� o se modi� a emrelação ao apresentado na seção 4.3.
0 0.5 1 1.5 2 2.5 3 3.5 40
0.01
0.02
0.03
0.04
0.05
0.06
Razão de frequências r
Am
plitu
de:
X0 (
m)
ζ=0.5
ζ=0.25
ζ=1
ζ=0.1
Figura 38: Amplitude de vibração de máquina om desbalan eamento rotativo.O valor da frequên ia de ressonân ia da função (14) ou, analogamente, do ganho Grot:Grot =
mX0
mde=
r2
√
(1 − r2)2 + (2ζr)2é al ulado avaliando-se o seguinte:∂Grot
∂r= 0 → rres =
1√
1 − 2ζ2> 1 44

Vibrações Me âni as5.3 Força Transmitida ao SoloVoltemos ao assunto tratado no apítulo anterior. Pode-se al ular o valor da amplitudede força transmitida ao solo FT onhe endo-se o módulo da força harm�ni a agindo sobre a massam, ou F0. Neste aso, as duas amplitudes de força rela ionam-se através da Transmissibilidade deForça Tf , (Rao 2008) p.321, dada pela mesma expressão da transmissibilidade de deslo amentoTd omo omentado anteriormente, ou seja:
Tf =FT
F0=
√
1 + (2ζr)2√
(1 − r2)2 + (2ζr)2(= Td)onde FT é o módulo da força transmitida ao solo, uja variação temporal Fsolo(t) o orre de a ordo om a seguinte expressão:
Fsolo(t) = FT cos(ωt − φ1 − φ2),(Rao 2008), p.321. Note que este resultado não deve ser apli ado ao movimento devido a os ilaçãode base dis utido anteriormente.5.4 Exemplo: Desbalan eamento Rotativo de uma TurbinaSeja um rotor (ou turbina) desbalan eado, de massa total m, que gira om velo idade angularω em torno do seu eixo, que passa pelo entro geométri o O, omo indi a a Fig. 39. O rotorpossui massa desbalan eada md lo alizada a uma distân ia e do entro do eixo de rotação. Pode-se, alternativamente, lo alizar o entro de massa M lo alizado a uma distân ia δ do entrogeométri o O. O eixo fun iona omo mola de �exão e este se deforma a medida que o rotor gira om ω. Pontos notáveis:Ponto B: Centro de Rotação ( entro dos man ais)Ponto O: Centro Geométri o do rotorPonto M : Centro de Massa do rotorDeseja-se determinar o movimento de translação, medido pela oordenada x, do ponto O relativoao entro geométri o do rotor em relação ao entro dos man ais B.Substituindo a força de desbalan eamento Fdesb(t) na equação de movimento do sistema,tem-se:
mx + kx = mdeω2 cos(ωt)
= mδω2 cos(ωt)Note que a expressão a ima pode ser es rita tanto em função da massa de desbalan eamento mde da ex entri idade e omo em função da massa total m e da posição do entro de massa δ. Aposição do entro de massa δ pode ser al ulado apli ando-se sua de�nição:δ =
m 0 + md e
m= e
md
mNa resolução deste exemplo, será utilizada a segunda forma. 45
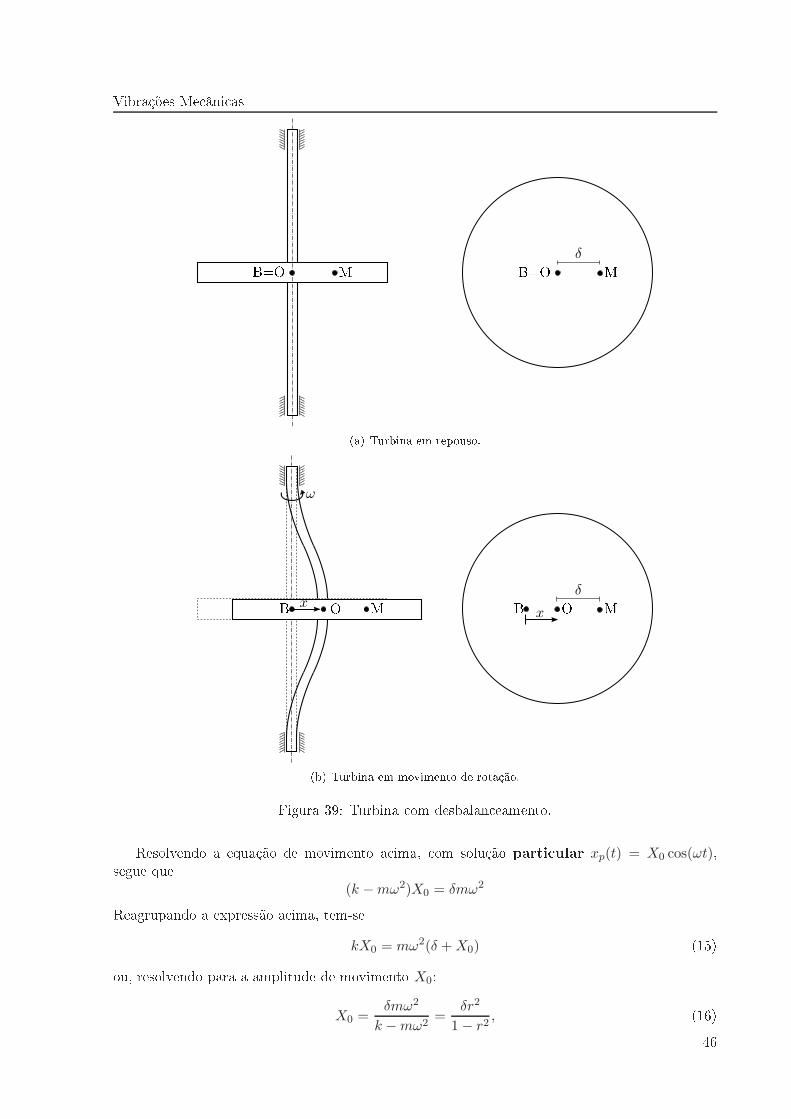
Vibrações Me âni asB=O M B=O Mδ
(a) Turbina em repouso.O M O MδB B x
x
ω
(b) Turbina em movimento de rotação.Figura 39: Turbina om desbalan eamento.Resolvendo a equação de movimento a ima, om solução parti ular xp(t) = X0 cos(ωt),segue que(k − mω2)X0 = δmω2Reagrupando a expressão a ima, tem-sekX0 = mω2(δ + X0) (15)ou, resolvendo para a amplitude de movimento X0:
X0 =δmω2
k − mω2=
δr2
1 − r2, (16)46
Vibrações Me âni asonde r = ω/ωn e a frequên ia natural ωn é determinada porωn =
√
k
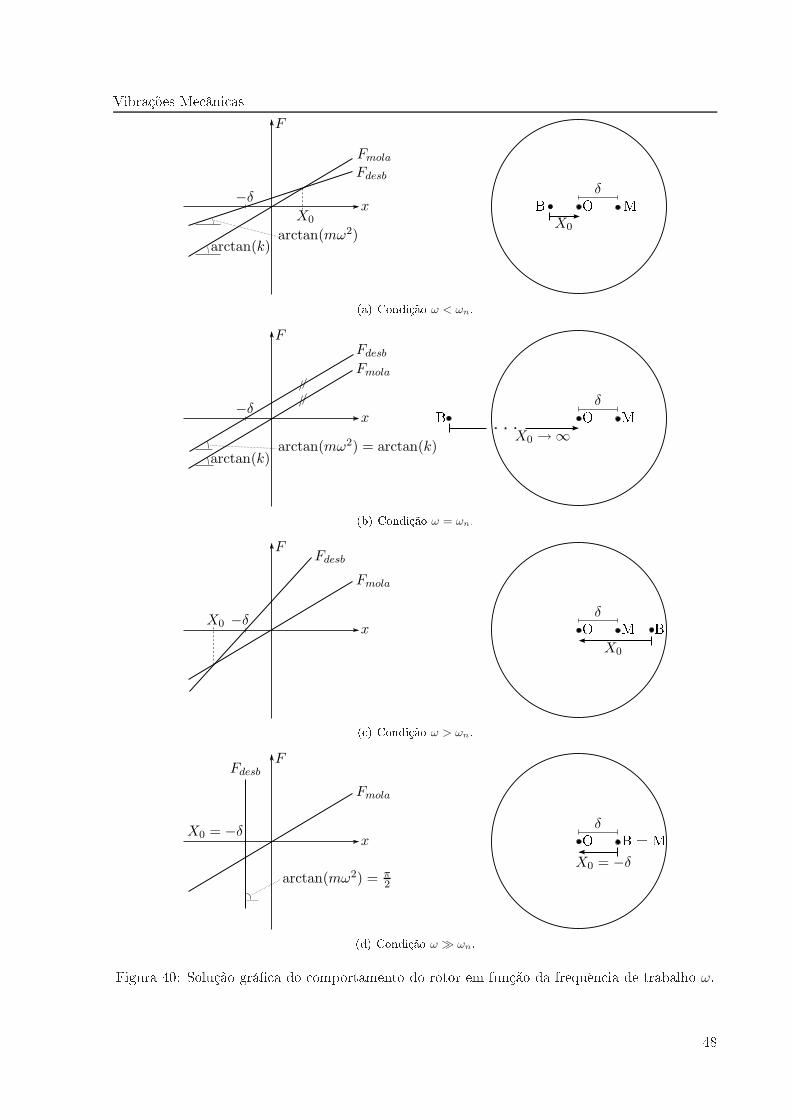
mPode-se, a partir do lado direito da igualdade em (15), de�nir uma nova força de desbalan ea-mento uja amplitude é medida em relação ao ponto B. Logo, segue queFdesb(X0) = mω2(δ + X0)Pode-se plotar a urva para força Fdesb(X0) a ima e outra para a força de mola Fmola = kX0e obter uma solução grá� a do valor da amplitude X0, dado em (16), pela interse ção das duas urvas, onforme (Nigro 1998).Dependendo do valor do oe� iente angular da reta obtida om o plote da força Fdesb(X0),dado por mω2, a solução X0 ou interse ção das duas urvas varia. Existem quatro asos a onsiderar, omo ilustra a Figs. 40:
ω < ωn: a interse ção das retas, ou solução, o orre para valor positivo de X0;ω = ωn: as duas urvas são dadas por retas paralelas e não se en ontram, ex eto no in�nito. Logo,
X0 → ∞ o que orresponde a uma ondição de ressonân ia para sistemas não-amorte idos.Isto equivale a tomar r → 1 na expressão (16) ou em dizer que a posição do ponto O tendepara ponto in�nitamente longe de B;ω > ωn: a interse ção das retas, ou solução, o orre para valor negativo de X0. Lembrando daFig. 32, que para r > 1, isto equivale a dizer que, a fase entre a solução parti ular e aforça de desbalan eamento é de 180◦. Como o segmento OM deve sempre apontar para omesmo sentido da força F (t), o ponto M se deslo a para posição entre os pontos B e O;ω ≫ ωn: a reta que representa o desbalan eamento é, no limite, verti al e a solução dá-se paraum valor onstante −δ. Neste aso os pontos B e M oin idem e o entro geométri o Ogira em torno do entro de massa M om raio onstante δ, Fig. 40(d).5.5 Exer í ios Propostos1) Uma maquina om massa m está apoiada sobre um onjunto de isoladores de borra ha �xosao piso da fábri a. Devido a operação de outras máquinas vizinhas a esta, o piso possui um movi-mento os ilatório dado por xA(t) = 1, 5 · 10−3 sin(30t). Determinar a equação do deslo amentox(t) da máquina se m = 200kg, keq = 2000Nm e ζ = 0, 3.2) Um ompressor de um ilindro possui massa de 100kg e está instalado em suportes deborra ha omo mostrado abaixo. A rigidez e a onstante de amorte imento da borra ha sãorespe tivamente 106N/m e 2000Ns/m. Se o desbalan eamento do ompressor é equivalentea uma massa de 0, 1kg lo alizada no ponto A, determine a resposta do ompressor para umarotação da manivela de 3000rpm. Admitir r = 10cm.3) Uma máquina industrial om massa de 450kg é suportada por molas uja de�exão estáti aé de 5mm. Se a máquina possui um desbalan eamento de 900g mm, determinar a amplitude devibração a 1200rpm. 47
Vibrações Me âni asO MδB
X0
Fmola
Fdesb
x
F
−δ
X0
arctan(mω2)arctan(k) (a) Condição ω < ωn.
O MδBX0 → ∞
Fmola
Fdesb
x
F
−δ
arctan(mω2) = arctan(k)arctan(k) (b) Condição ω = ωn.
O Mδ BX0
Fmola
Fdesb
x
F
−δX0
( ) Condição ω > ωn.O B = Mδ
X0 = −δ
Fmola
Fdesb
x
F
X0 = −δ
arctan(mω2) = π2(d) Condição ω ≫ ωn.Figura 40: Solução grá� a do omportamento do rotor em função da frequên ia de trabalho ω.48
Vibrações Me âni as
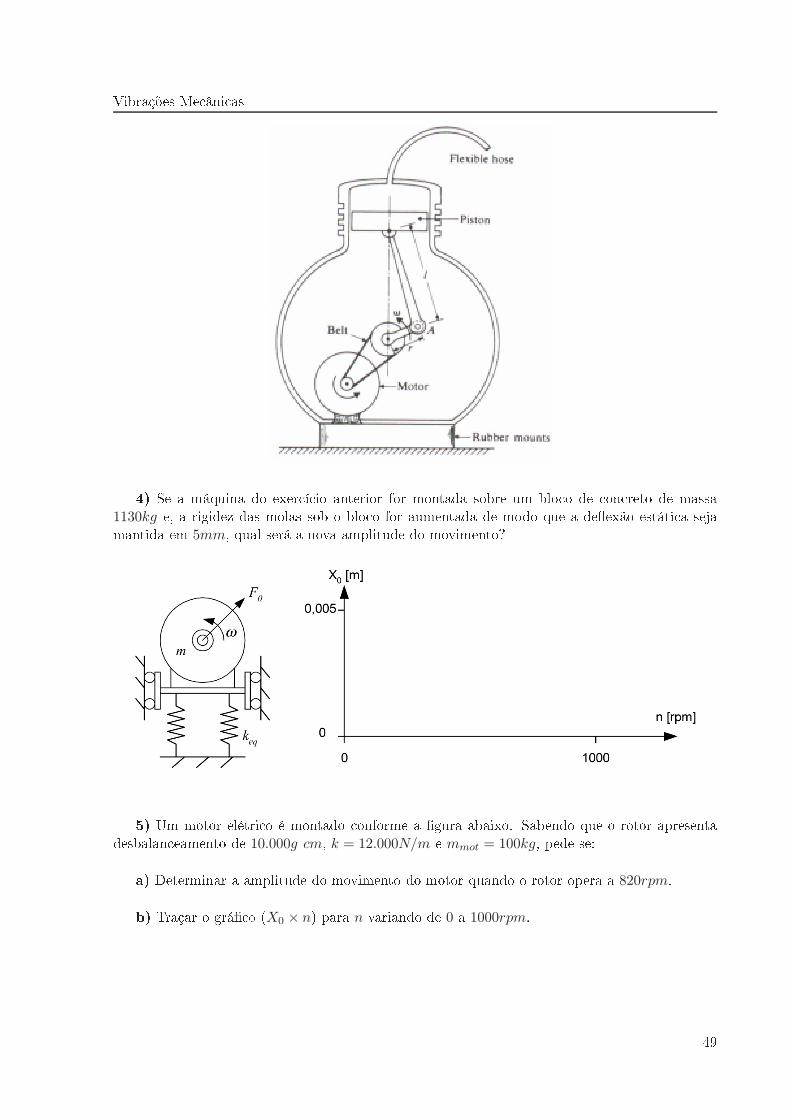
4) Se a máquina do exer í io anterior for montada sobre um blo o de on reto de massa1130kg e, a rigidez das molas sob o blo o for aumentada de modo que a de�exão estáti a sejamantida em 5mm, qual será a nova amplitude do movimento?
5) Um motor elétri o é montado onforme a �gura abaixo. Sabendo que o rotor apresentadesbalan eamento de 10.000g cm, k = 12.000N/m e mmot = 100kg, pede-se:a) Determinar a amplitude do movimento do motor quando o rotor opera a 820rpm.b) Traçar o grá� o (X0 × n) para n variando de 0 a 1000rpm.49
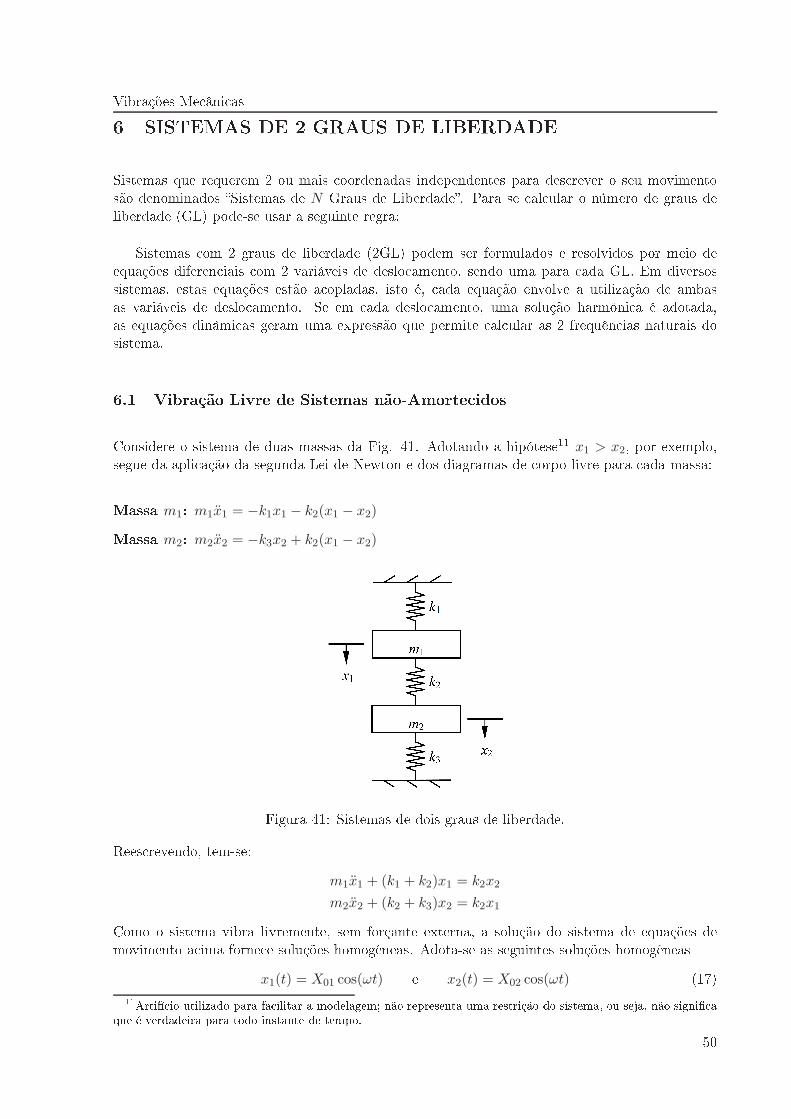
Vibrações Me âni as6 SISTEMAS DE 2 GRAUS DE LIBERDADESistemas que requerem 2 ou mais oordenadas independentes para des rever o seu movimentosão denominados �Sistemas de N Graus de Liberdade�. Para se al ular o número de graus deliberdade (GL) pode-se usar a seguinte regra:Sistemas om 2 graus de liberdade (2GL) podem ser formulados e resolvidos por meio deequações diferen iais om 2 variáveis de deslo amento, sendo uma para ada GL. Em diversossistemas, estas equações estão a opladas, isto é, ada equação envolve a utilização de ambasas variáveis de deslo amento. Se em ada deslo amento, uma solução harm�ni a é adotada,as equações dinâmi as geram uma expressão que permite al ular as 2 frequên ias naturais dosistema.6.1 Vibração Livre de Sistemas não-Amorte idosConsidere o sistema de duas massas da Fig. 41. Adotando a hipótese11 x1 > x2, por exemplo,segue da apli ação da segunda Lei de Newton e dos diagramas de orpo livre para ada massa:Massa m1: m1x1 = −k1x1 − k2(x1 − x2)Massa m2: m2x2 = −k3x2 + k2(x1 − x2)
Figura 41: Sistemas de dois graus de liberdade.Rees revendo, tem-se:m1x1 + (k1 + k2)x1 = k2x2
m2x2 + (k2 + k3)x2 = k2x1Como o sistema vibra livremente, sem forçante externa, a solução do sistema de equações demovimento a ima forne e soluções homogêneas. Adota-se as seguintes soluções homogêneasx1(t) = X01 cos(ωt) e x2(t) = X02 cos(ωt) (17)11Artifí io utilizado para fa ilitar a modelagem; não representa uma restrição do sistema, ou seja, não signi� aque é verdadeira para todo instante de tempo. 50
Vibrações Me âni asDerivando-se estas soluções e substituindo nas equações de movimento, segue:−m1ω
2X01 + (k1 + k2)X01 = k2X02 (i)
−m2ω2X02 + (k2 + k3)X02 = k2X01 (ii)Através de manipulação algébri a, em seguida, vem:de (i) → X02
X01=
(k1 + k2) − m1ω2
k2de (ii) → X02
X01=
k2
(k2 + k3) − m2ω2Igualando as duas expressões a ima e multipli ando o resultado em ruz, obtém-se a seguinteequação bi-quadrada (do quarto grau):(m1m2)︸ ︷︷ ︸
a
ω4 − [m2(k1 + k2) + m1(k2 + k3)]︸ ︷︷ ︸
b
ω2 + (k1 + k2)(k2 + k3) − k22
︸ ︷︷ ︸
c
= 0 (18)Esta é denominada de equação ara terísti a e forne e as frequên ias naturais do sistema de doisgraus de liberdade. Note que os oe� ientes da equação a ima são os oe� ientes de uma equaçãodo segundo grau abaixo:ay2 + by + c = 0, onde y = ω2 ujas duas soluções são determinadas pela fórmula de Bháskara:
y1, y2 =−b ±
√b2 − 4ac
2aResolvendo a equação ara terísti a a ima e utilizando a relação y = ω2, onde aproveita-seapenas o valor positivo de ω = ±√y, obtém-se as duas frequên ias naturais ω1 e ω2.12Denomina-se de modos de vibrar a relação de amplitudes do movimento das massas ompo-nentes do sistema. Pode-se al ular estes modos, ou relações de amplitude, substituindo-se asfrequên ias naturais ω1 e ω2 nas expressões (i) ou (ii) a ima. De�ne-se ω1 omo a frequên ia demenor valor (ω1 < ω2) e que representará a frequên ia do primeiro modo. Portanto, tem-se:
X(1)02
X(1)01
∣∣∣∣∣ω1
=(k1 + k2) − m1ω
21
k2e X
(2)02
X(2)01
∣∣∣∣∣ω2
=(k1 + k2) − m1ω
22
k2Exemplo: Com relação ao sistema massa-mola da �gura abaixo, en ontrar as frequên iasnaturais e modos de vibração, sabendo que o sistema move-se somente na verti al.Assume-se solução harm�ni a para a vibração livre. Se forem medidos x1 e x2 a partir dasposições de equilíbrio estáti o das massas m1 e m2, respe tivamente, pode-se obter as equações demovimento e as respe tivas soluções para k1 = k2 = k3 = 1000N/m. As equações de movimentosão:m1x1 + 2kx1 = kx2 → 5x1 + 2000x1 = 1000x2
m2x2 + 2kx2 = kx1 → 10x2 + 2000x2 = 1000x1 51
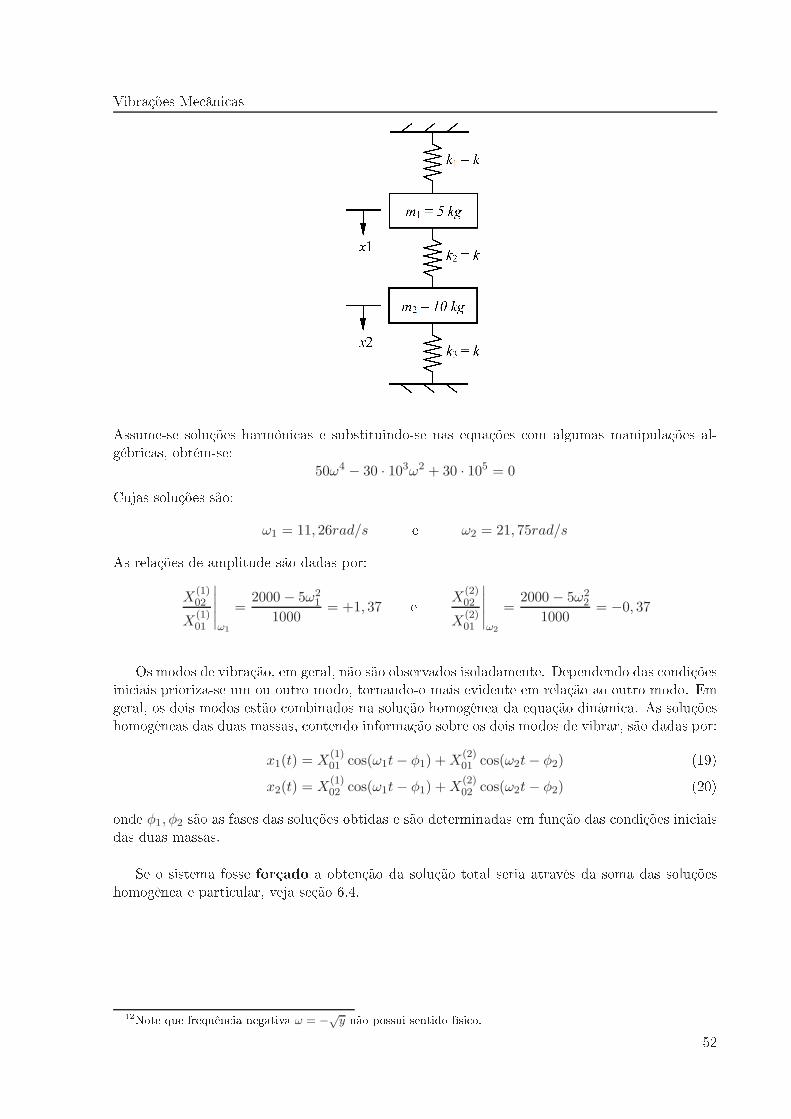
Vibrações Me âni as
Assume-se soluções harm�ni as e substituindo-se nas equações om algumas manipulações al-gébri as, obtém-se:50ω4 − 30 · 103ω2 + 30 · 105 = 0Cujas soluções são:
ω1 = 11, 26rad/s e ω2 = 21, 75rad/sAs relações de amplitude são dadas por:X
(1)02
X(1)01
∣∣∣∣∣ω1
=2000 − 5ω2
1
1000= +1, 37 e X
(2)02
X(2)01
∣∣∣∣∣ω2
=2000 − 5ω2
2
1000= −0, 37Os modos de vibração, em geral, não são observados isoladamente. Dependendo das ondiçõesini iais prioriza-se um ou outro modo, tornando-o mais evidente em relação ao outro modo. Emgeral, os dois modos estão ombinados na solução homogênea da equação dinâmi a. As soluçõeshomogêneas das duas massas, ontendo informação sobre os dois modos de vibrar, são dadas por:
x1(t) = X(1)01 cos(ω1t − φ1) + X
(2)01 cos(ω2t − φ2) (19)
x2(t) = X(1)02 cos(ω1t − φ1) + X
(2)02 cos(ω2t − φ2) (20)onde φ1, φ2 são as fases das soluções obtidas e são determinadas em função das ondições ini iaisdas duas massas.Se o sistema fosse forçado a obtenção da solução total seria através da soma das soluçõeshomogênea e parti ular, veja seção 6.4.
12Note que frequên ia negativa ω = −√
y não possui sentido físi o. 52
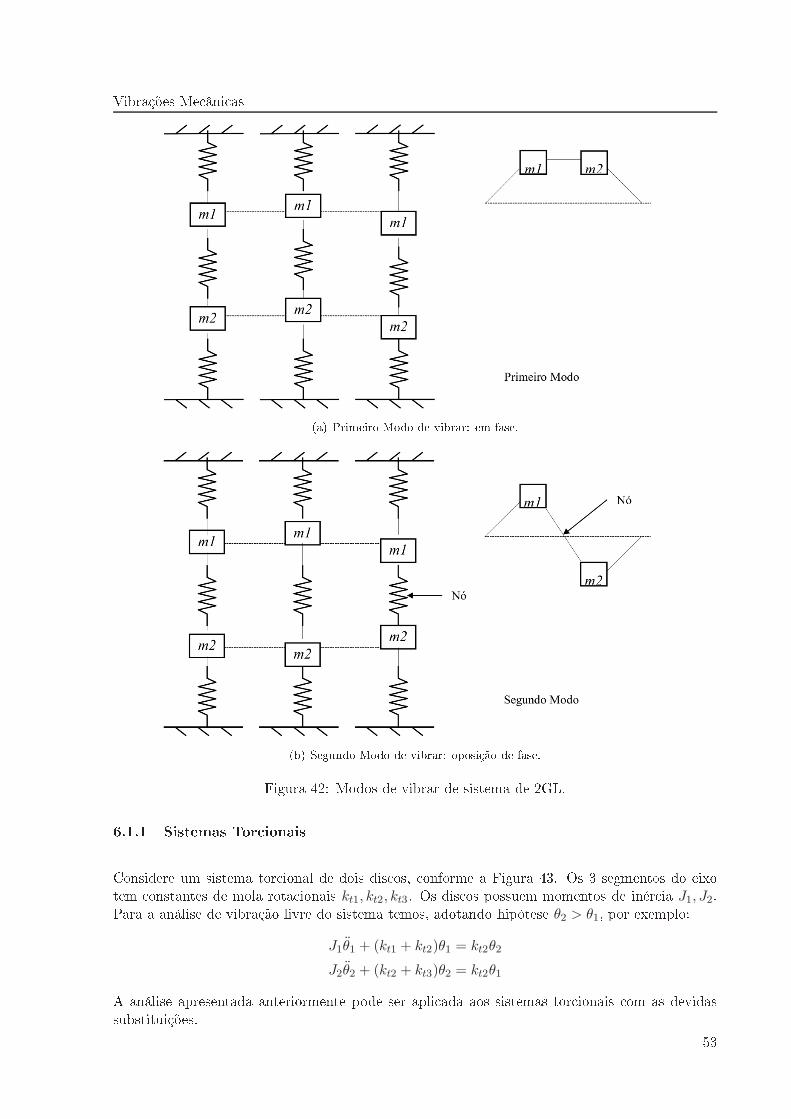
Vibrações Me âni as
(a) Primeiro Modo de vibrar: em fase.
(b) Segundo Modo de vibrar: oposição de fase.Figura 42: Modos de vibrar de sistema de 2GL.6.1.1 Sistemas Tor ionaisConsidere um sistema tor ional de dois dis os, onforme a Figura 43. Os 3 segmentos do eixotêm onstantes de mola rota ionais kt1, kt2, kt3. Os dis os possuem momentos de inér ia J1, J2.Para a análise de vibração livre do sistema temos, adotando hipótese θ2 > θ1, por exemplo:J1θ1 + (kt1 + kt2)θ1 = kt2θ2
J2θ2 + (kt2 + kt3)θ2 = kt2θ1A análise apresentada anteriormente pode ser apli ada aos sistemas tor ionais om as devidassubstituições. 53
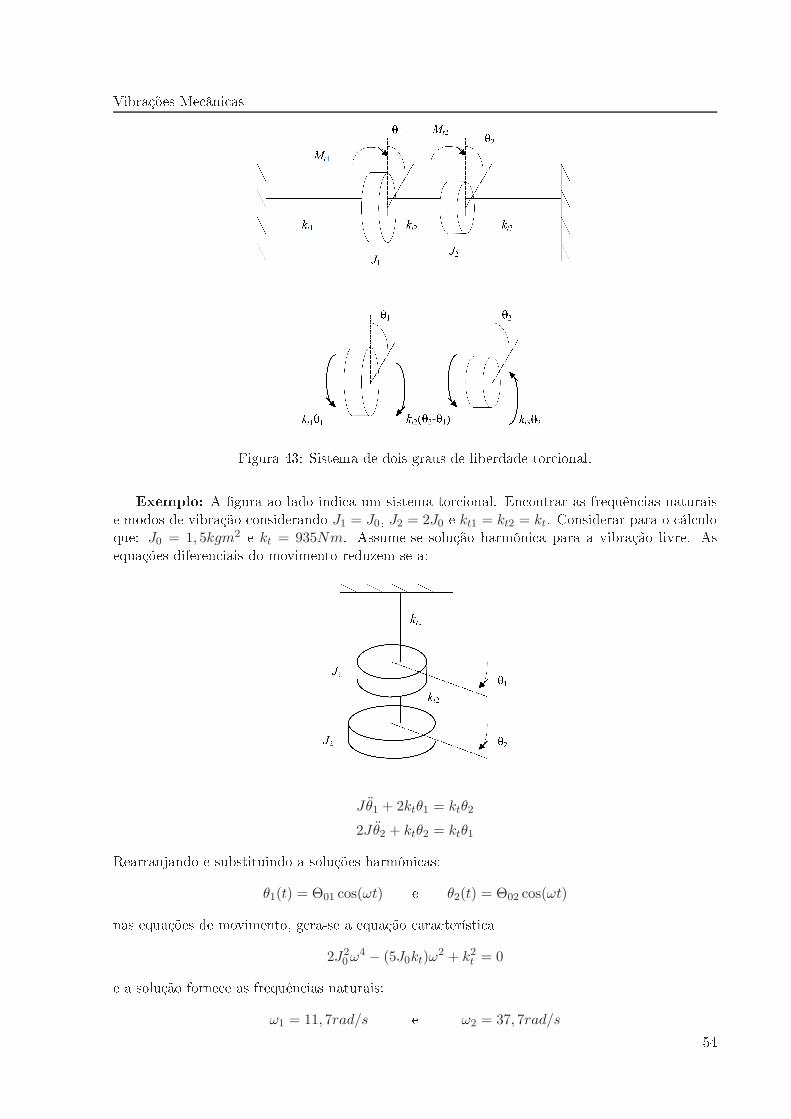
Vibrações Me âni as
Figura 43: Sistema de dois graus de liberdade tor ional.Exemplo: A �gura ao lado indi a um sistema tor ional. En ontrar as frequên ias naturaise modos de vibração onsiderando J1 = J0, J2 = 2J0 e kt1 = kt2 = kt. Considerar para o ál uloque: J0 = 1, 5kgm2 e kt = 935Nm. Assume-se solução harm�ni a para a vibração livre. Asequações diferen iais do movimento reduzem-se a:
Jθ1 + 2ktθ1 = ktθ2
2Jθ2 + ktθ2 = ktθ1Rearranjando e substituindo a soluções harm�ni as:θ1(t) = Θ01 cos(ωt) e θ2(t) = Θ02 cos(ωt)nas equações de movimento, gera-se a equação ara terísti a
2J20 ω4 − (5J0kt)ω
2 + k2t = 0e a solução forne e as frequên ias naturais:
ω1 = 11, 7rad/s e ω2 = 37, 7rad/s 54
Vibrações Me âni asAs relações de amplitude são dadas por:Θ
(1)02
Θ(1)01
∣∣∣∣∣ω1
=2kt − J0ω
21
kt= +1, 78 e Θ
(2)02
Θ(2)01
∣∣∣∣∣ω2
=2kt − J0ω
22
kt= −0, 286.2 A oplamento de CoordenadasUm sistema om N GL requer N oordenadas independentes para des rever sua on�guraçãoe normalmente estas oordenadas são quantidades geometri amente independentes da posiçãode equilíbrio do orpo em vibração. Por outro lado é possível sele ionar um outro onjunto de
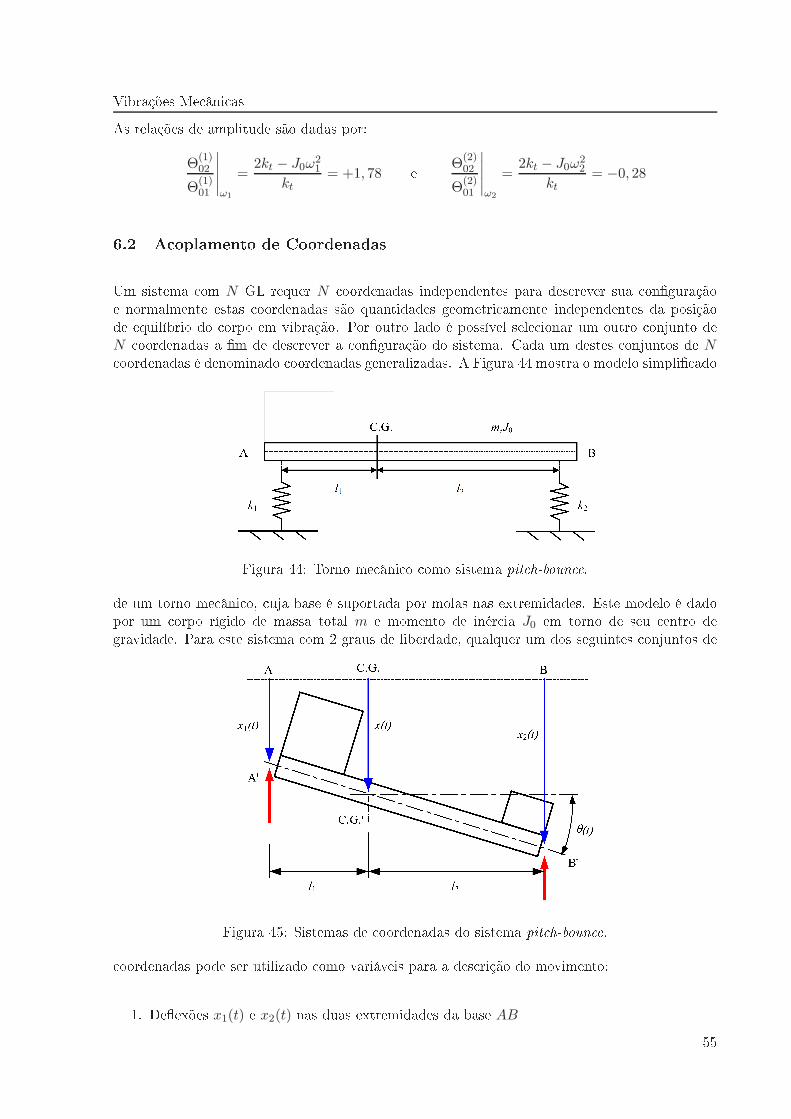
N oordenadas a �m de des rever a on�guração do sistema. Cada um destes onjuntos de N oordenadas é denominado oordenadas generalizadas. A Figura 44 mostra o modelo simpli� ado
Figura 44: Torno me âni o omo sistema pit h-boun e.de um torno me âni o, uja base é suportada por molas nas extremidades. Este modelo é dadopor um orpo rígido de massa total m e momento de inér ia J0 em torno de seu entro degravidade. Para este sistema om 2 graus de liberdade, qualquer um dos seguintes onjuntos de
Figura 45: Sistemas de oordenadas do sistema pit h-boun e. oordenadas pode ser utilizado omo variáveis para a des rição do movimento:1. De�exões x1(t) e x2(t) nas duas extremidades da base AB 55

Vibrações Me âni as2. De�exão x(t) do entro de gravidade e rotação θ(t)3. De�exão x1(t) da extremidade A e rotação θ(t)No aso 2 a ima, usando x(t) e θ(t) omo variáveis de deslo amento e onforme a Fig. 45, tem-se:mx = −k1(x − l1θ) − k2(x + l2θ)
J0θ = k1(x − l1θ)l1 − k2(x + l2θ)l2Sugestão: Tente realizar a modelagem do sistema a ima om outras orientações positivaspara as oordenadas x e θ. Qual a in�uên ia da de�nição do sentido positivo das oordenadasna modelagem?6.3 Equações Matri iaisAs equações diferen iais apresentadas na seção 6.1 podem ser representadas por uma equaçãomatri ial. Em sistemas de 2 ou mais graus de liberdade, rees rever um onjunto de váriasequações de movimento na forma matri ial auxilia na sua solução. Para o exemplo itado naseção 6.1 pode-se es rever as equações dinâmi as:m1x1 + (k1 + k2)x1 = k2x2
m2x2 + (k2 + k3)x2 = k2x1De�nindo-se um vetor ontendo as oordenadas x1 e x2, a forma matri ial � a:[m1 00 m2
](x1
x2
)
+
[k1 + k2 −k2
−k2 k2 + k3
](x1
x2
)
=
(00
)Pode-se de�nir as matrizes de massa M e de rigidez K por:M =
[m1 00 m2
] e K =
[k1 + k2 −k2
−k2 k2 + k3
]Note que as matrizes de massa e de rigidez a ima são simétri as. A equação matri ial representaum sistema elasti amente a oplado, ou seja, não se pode resolve-la omo se fossem dois sistemasde 1GL independentes. Substituindo-se as soluções harm�ni as para x1 e x2, dadas por (17), naequação matri ial, tem-se:−ω2
[m1 00 m2
](X1
X2
)
cos(ωt) +
[k1 + k2 −k2
−k2 k2 + k3
](X1
X2
)
cos(ωt) =
(00
)Ou ainda,[k1 + k2 − ω2m1 −k2
−k2 k2 + k3 − ω2m2
](X1
X2
)
cos(ωt) =
(00
)Observe que não podemos resolver a equação a ima, isolando o vetor ontendo as amplitudes X1e X2, pois neste aso a solução indi aria que os deslo amentos das massas m1 e m2 são nulos,ou seja, um sistema estáti o. Logo, não devemos inverter a matriz (K − ω2M). Para que nãoexista inversa o determinante desta matriz deve ser é igual a zero:
det
[k1 + k2 − ω2m1 −k2
−k2 k2 + k3 − ω2m2
]
= det(K − ω2
M)
= 0Este determinante da matriz representa a mesma equação ara terísti a do sistema de 2GL dadapela expressão (18) e permite al ular as 2 frequên ias naturais ω1 e ω2 do sistema. 56

Vibrações Me âni as6.4 Vibração Forçada de Sistemas não-Amorte idosPara sistemas submetidos a forças externas pode-se inverter a matriz (K − ω2M) a ima para al ular a amplitude das massas, pois neste aso não obtém-se a solução identi amente nula, ousolução trivial, o que indi aria que as massas do sistema en ontram-se em repouso.Admite-se que duas forças externas F1(t), F2(t), apli adas nas massas 1 e 2, respe tivamente,possuem mesma frequên ia ω e estão em fase, ou seja:
F1(t) = F01 cos(ωt)
F2(t) = F02 cos(ωt)Como o sistema é forçado, a solução total de ada massa é obtida pela soma de uma omponentehomogênea, dis utida anteriormente e dada pelas expressões (19)-(20), om uma omponenteparti ular. Adotando-se as soluções parti ulares xp1 e xp2 para as massas 1 e 2, respe tivamente,tem-se:xp1(t) = Xp1 cos(ωt)
xp2(t) = Xp2 cos(ωt)Neste aso obtém-se as amplitudes Xp1 e Xp2 das soluções parti ulares através da seguinteexpressão13:(
Xp1
Xp2
)
=(K − ω2
M)−1(
F01
F02
)
=1
det(K − ω2M)
[k2 + k3 − m2ω
2 k2
k2 k1 + k2 − m1ω2
](F01
F02
)Após a obtenção das soluções parti ulares a ima, a solução total é determinada somando-se xp1e xp2 om as soluções homogêneas ( ompletas) das expressões (19)-(20).ATENÇ�O!A expressão a ima representa o pro edimento orreto para obter as amplitudes devibração Xp1 e Xp2 de um sistema de 2GL submetido a uma força ou a duas forçasexternas. Não se deve, em hipótese alguma, utilizar as expressões do apítulo4 para este �m.13Lembrando a operação de inversão de uma matriz 2 × 2 genéri a:
A =
[a bc d
]
→ A−1 =1
detA
[d −b−c a
] 57
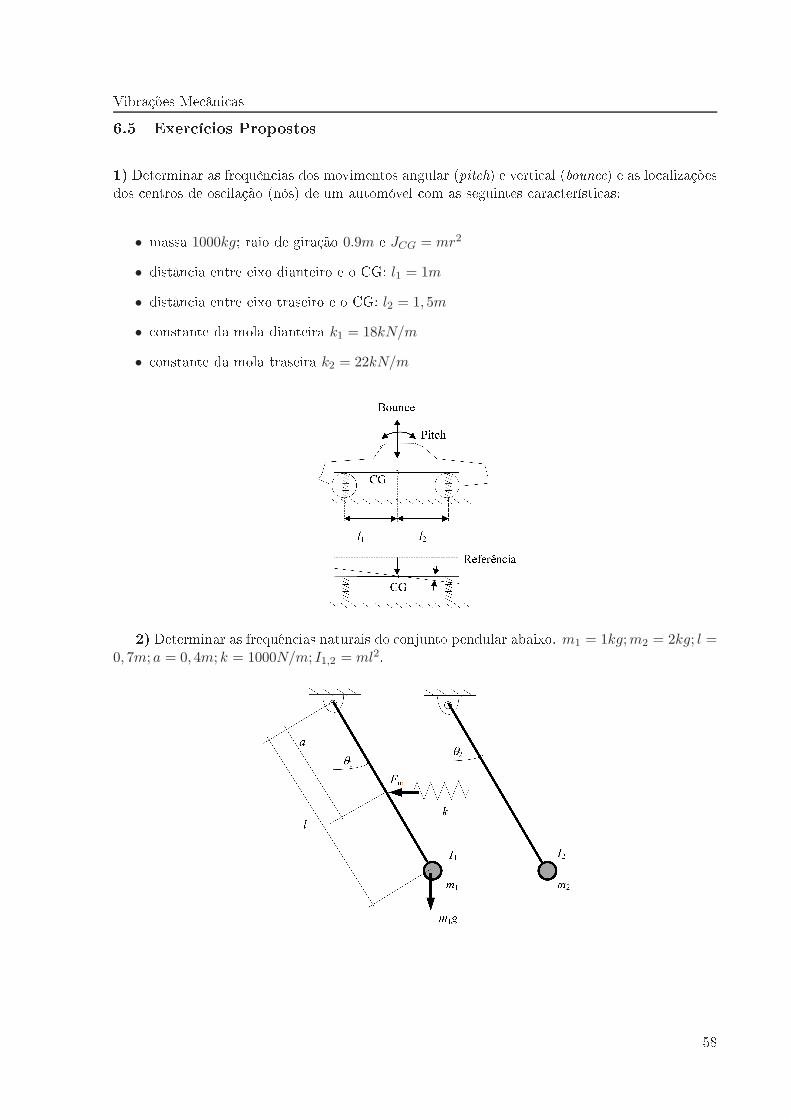
Vibrações Me âni as6.5 Exer í ios Propostos1) Determinar as frequên ias dos movimentos angular (pit h) e verti al (boun e) e as lo alizaçõesdos entros de os ilação (nós) de um automóvel om as seguintes ara terísti as:• massa 1000kg; raio de giração 0.9m e JCG = mr2
• distân ia entre eixo dianteiro e o CG: l1 = 1m
• distân ia entre eixo traseiro e o CG: l2 = 1, 5m
• onstante da mola dianteira k1 = 18kN/m
• onstante da mola traseira k2 = 22kN/m
2) Determinar as frequên ias naturais do onjunto pendular abaixo. m1 = 1kg;m2 = 2kg; l =0, 7m; a = 0, 4m; k = 1000N/m; I1,2 = ml2.
58
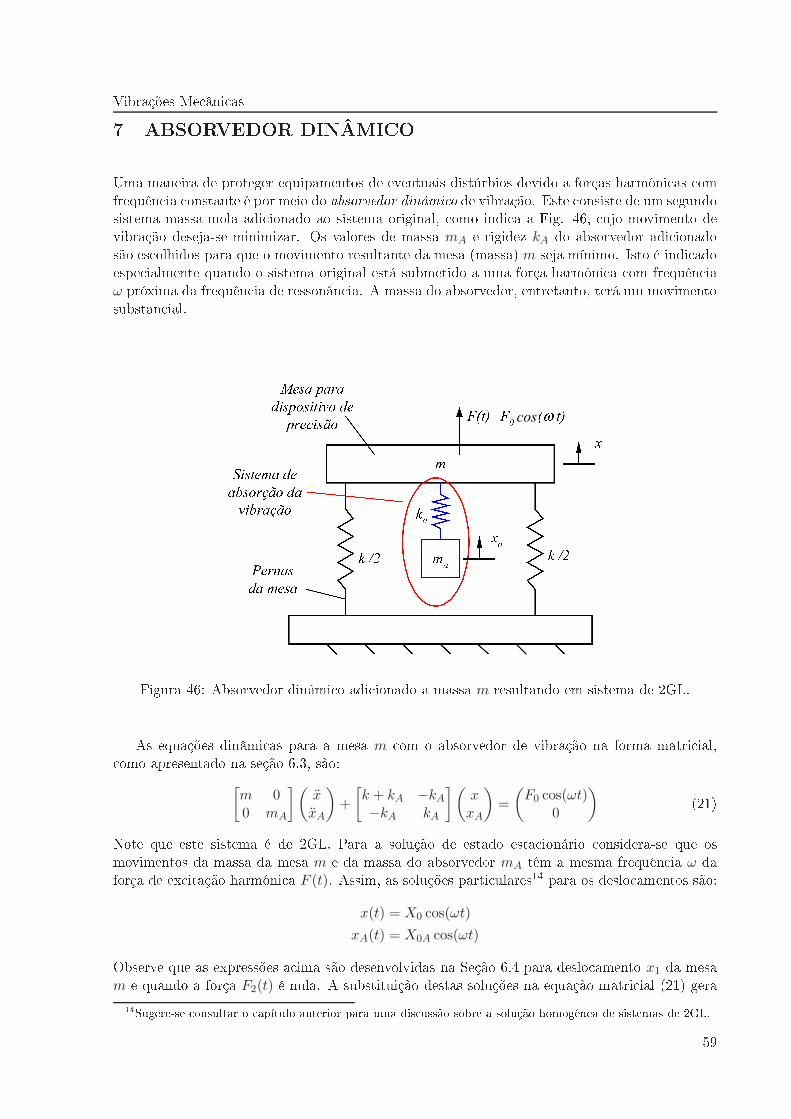
Vibrações Me âni as7 ABSORVEDOR DINÂMICOUma maneira de proteger equipamentos de eventuais distúrbios devido a forças harm�ni as omfrequên ia onstante é por meio do absorvedor dinâmi o de vibração. Este onsiste de um segundosistema massa-mola adi ionado ao sistema original, omo indi a a Fig. 46, ujo movimento devibração deseja-se minimizar. Os valores de massa mA e rigidez kA do absorvedor adi ionadosão es olhidos para que o movimento resultante da mesa (massa) m seja mínimo. Isto é indi adoespe ialmente quando o sistema original está submetido a uma força harm�ni a om frequên iaω próxima da frequên ia de ressonân ia. A massa do absorvedor, entretanto, terá um movimentosubstan ial.
cos
Figura 46: Absorvedor dinâmi o adi ionado a massa m resultando em sistema de 2GL.As equações dinâmi as para a mesa m om o absorvedor de vibração na forma matri ial, omo apresentado na seção 6.3, são:[m 00 mA
](xxA
)
+
[k + kA −kA
−kA kA
](xxA
)
=
(F0 cos(ωt)
0
) (21)Note que este sistema é de 2GL. Para a solução de estado esta ionário onsidera-se que osmovimentos da massa da mesa m e da massa do absorvedor mA têm a mesma frequên ia ω daforça de ex itação harm�ni a F (t). Assim, as soluções parti ulares14 para os deslo amentos são:x(t) = X0 cos(ωt)
xA(t) = X0A cos(ωt)Observe que as expressões a ima são desenvolvidas na Seção 6.4 para deslo amento x1 da mesam e quando a força F2(t) é nula. A substituição destas soluções na equação matri ial (21) gera14Sugere-se onsultar o apítulo anterior para uma dis ussão sobre a solução homogênea de sistemas de 2GL.59

Vibrações Me âni asa seguinte equação algébri a abaixo:[k + kA − ω2m −kA
−kA kA − ω2mA
](X0
X0A
)
cos(ωt) =
(F0
0
)
cos(ωt)Após o an elamento da função harm�ni a cos(ωt), as amplitudes X0 e X0A são obtidas após ainversão da matriz (K − ω2M):
(X0
X0A
)
=
[k + kA − ω2m −kA
−kA kA − ω2mA
]−1(
F0
0
)Revisando a operação de inversão de uma matriz 2 × 2 genéri a, tem-se:A =
[a bc d
]
→ A−1 =1
detA
[d −b−c a
]Logo, após substituição, segue(
X0
X0A
)
=1
(k + kA − ω2m)(kA − ω2mA) − k2A
[kA − ω2mA kA
kA k + kA − ω2m
](F0
0
)e, realizando a multipli ação matri ial a ima, as amplitudes X0 e X0A são dadas por:X0 =
(kA − ω2mA)F0
(k + kA − ω2m)(kA − ω2mA) − k2A
e X0A =kAF0
(k + kA − ω2m)(kA − ω2mA) − k2A
(22)Note que para anular a amplitude X0 da mesa, pode-se es olher kA e mA de forma que:kA − ω2mA = 0 ou kA = ω2mA (23)Se o absorvedor de vibração é es olhido para satisfazer a equação a ima, o movimento de estadoesta ionário da mesa é nulo (X0 = 0). Desta forma, a amplitude X0A do deslo amento em estadoesta ionário do absorvedor é:
X0A =kAF0
(k + kA − ω2m)(0) − k2A
= −F0
kA→ xA(t) = −F0
kAcos(ωt)A espe i� ação da massa e rigidez do absorvedor dinâmi o pode ser realizada de a ordo omuma das seguintes estratégias de projeto.7.1 Estratégia de Projeto 11. Quando a frequên ia de trabalho ω induz a mesa m a entrar em ressonân ia tem-se ω = ωn.Es olhe-se anular a amplitude de vibração da massa m na frequên ia natural ωn;2. Adota-se a massa do absorvedor mA omo uma fração da massa da mesa: mA = µ m, onde
µ ≪ 1 (tipi amente 1% < µ < 5%);3. Utilizando (23) e lembrando que ω2n = k/m, hega-se a
ω2 =kA
mA
=k
m= ω2
n → kA = µ k 60
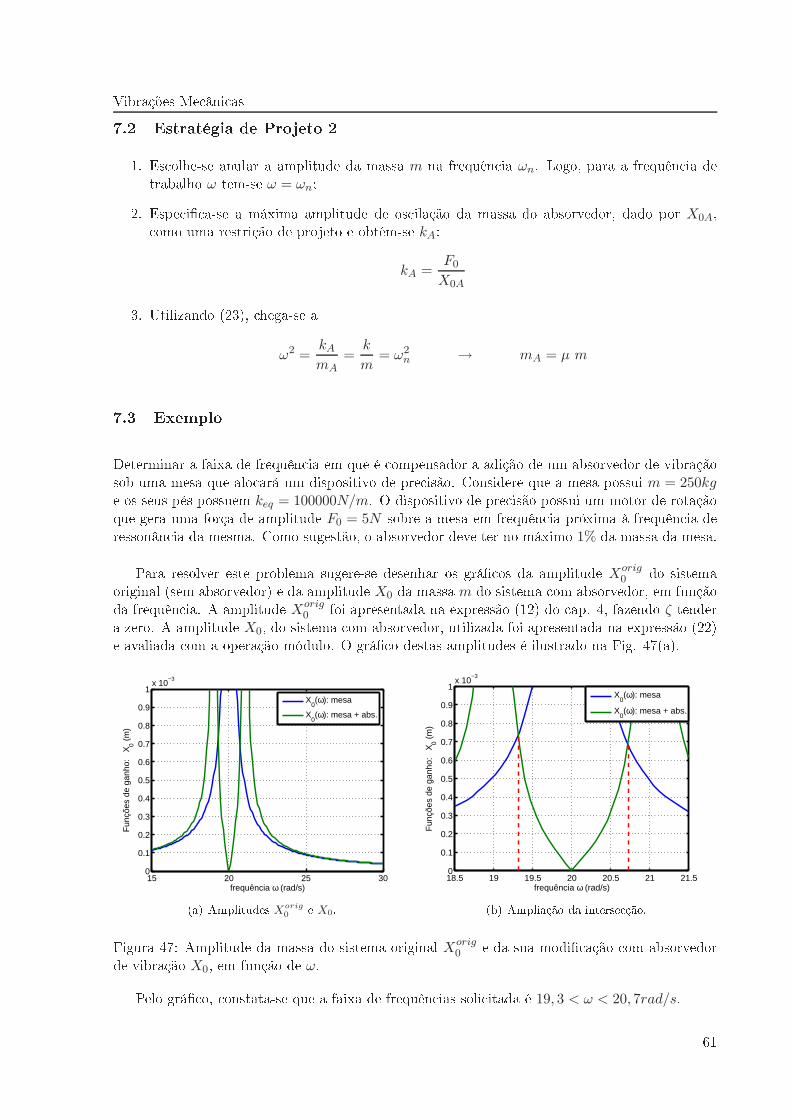
Vibrações Me âni as7.2 Estratégia de Projeto 21. Es olhe-se anular a amplitude da massa m na frequên ia ωn. Logo, para a frequên ia detrabalho ω tem-se ω = ωn;2. Espe i� a-se a máxima amplitude de os ilação da massa do absorvedor, dado por X0A, omo uma restrição de projeto e obtém-se kA:kA =
F0
X0A3. Utilizando (23), hega-se aω2 =
kA
mA=
k
m= ω2
n → mA = µ m7.3 ExemploDeterminar a faixa de frequên ia em que é ompensador a adição de um absorvedor de vibraçãosob uma mesa que alo ará um dispositivo de pre isão. Considere que a mesa possui m = 250kge os seus pés possuem keq = 100000N/m. O dispositivo de pre isão possui um motor de rotaçãoque gera uma força de amplitude F0 = 5N sobre a mesa em frequên ia próxima à frequên ia deressonân ia da mesma. Como sugestão, o absorvedor deve ter no máximo 1% da massa da mesa.Para resolver este problema sugere-se desenhar os grá� os da amplitude Xorig0 do sistemaoriginal (sem absorvedor) e da amplitude X0 da massa m do sistema om absorvedor, em funçãoda frequên ia. A amplitude Xorig
0 foi apresentada na expressão (12) do ap. 4, fazendo ζ tendera zero. A amplitude X0, do sistema om absorvedor, utilizada foi apresentada na expressão (22)e avaliada om a operação módulo. O grá� o destas amplitudes é ilustrado na Fig. 47(a).
15 20 25 300
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1x 10
−3
frequência ω (rad/s)
Fun
ções
de
ganh
o:
X0 (
m)
X0(ω): mesa
X0(ω): mesa + abs.
(a) Amplitudes Xorig0 e X0. 18.5 19 19.5 20 20.5 21 21.5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1x 10
−3
frequência ω (rad/s)
Fun
ções
de
ganh
o:
X0 (
m)
X
0(ω): mesa
X0(ω): mesa + abs.
(b) Ampliação da interse ção.Figura 47: Amplitude da massa do sistema original Xorig0 e da sua modi� ação om absorvedorde vibração X0, em função de ω.Pelo grá� o, onstata-se que a faixa de frequên ias soli itada é 19, 3 < ω < 20, 7rad/s. 61
Vibrações Me âni as7.4 Exer í ios Propostos1) Um equipamento de ar ondi ionado instalado em uma fábri a tem frequên ia de ex itaçãoigual a 15Hz. Após a montagem do mesmo e iní io de operação, foi dete tado que o orreressonân ia do mesmo. O equipamento está humbado em uma viga bi-engastada de on retoque tem frequên ia natural de mesmo valor à frequên ia de operação. Um engenheiro a redita queum absorvedor de vibração seja a melhor solução. Espe i� ar uma onstante de mola equivalentepara o absorvedor de vibração uja massa seja de 10kg.2) No sistema tor ional do exemplo 2, da seção 6.1.1, foi determinado as frequên ias naturaisdo onjunto. Se um momento tor ional de valor 5Nm om frequên ia 25rad/s é apli ado sobreo dis o 2 (J2), determinar as amplitudes angulares de vibração dos dis os 1 e 2. Utilizar opro edimento indi ado na seção 6.3 para equa ionar as matrizes e depois apli ar o vetor demomentos externos de forma semelhante ao desenvolvido na seção 7.1.
62

Vibrações Me âni asA APÊNDICE: REVIS�OA.1 Solução de Equação Diferen ialEquações diferen iais ordinárias (EDO) são utilizadas para modelar o movimento de vibração.EDO utilizadas para modelar a dinâmi a de um sistema são também hamadas de:• Equação de movimento• Equação dinâmi aConsidere a seguinte equação que modela o sistema massa-mola:
mx(t) + kx(t) = 0Observe que esta é uma equação om as seguintes ara terísti as:• Equação diferen ial linear em x(t);• Eq. de segunda ordem em x(t);• ordinária: envolve apenas derivadas de x(t);• homogênea: não possui termos independentes de x ou suas derivadas;• parâmetros onstantes: m,k são onstantes.Solução da EDO: é uma função temporal. Como en ontrar a sua solução?Poderíamos integrá-la.Ou podemos estimar (ou � hutar�) uma solução dada por uma função trigonométri a, e veri-� ar se ela satisfaz a equação diferen ial. Es olhe-se:
x(t) = A cos(ωt − φ)Para veri� ar se ela de fato representa uma solução basta substituir esta função da EDO. Es olhe-se a primeira solução:x(t) = A cos(ωt − φ)
x(t) = −Aω sin(ωt − φ)
x(t) = −Aω2 cos(ωt − φ) = −ω2x(t)Se substituirmos a solução x(t), e a derivada segunda orrespondente x(t), na EDO, tem-se:−mω2x(t) + kx(t) = 0
(−mω2 + k)x(t) = 0
−mω2 + k = 0 → ω2 = k/m 63

Vibrações Me âni asou seja, para esta solução satisfaça a EDO é ne essário ter:ω =
√
k
mAnalogamente poderíamos empregar x(t) = A sin(ωt − φ′) omo solução e veri� ar sua vali-dade om a EDO. Note que as duas soluções omentadas a ima possuem duas onstantes não onhe idas.Analogamente, poderíamos resolver a EDO por um vetor girante, por um fasor dado por:z(t) = C exp(λt) = Ceλt
z(t) = Cλeλt
z(t) = Cλ2eλtonde λ ∈ C.A.2 Números ComplexosUm número omplexo é a omposição de dois números reais de a ordo om uma estrutura parti -ular. Quando espe i� a-se um número omplexo, são espe i� ados ou dados, na realidade, doisnúmeros reais:z = a + ib ∈ C, a, b ∈ RChama-se a, a parte real, e b, a parte imaginária. O número i é denominado a unidade imaginária.Em símbolos, os números a ima são representados por:
Re(z) = a, Im(z) = b
i2 = −1Portanto, ne essitam-se de dois números para espe i� ar um número omplexo. Pode-se, por-tanto, lo alizar um número omplexo no plano artesiano, uma vez que os números a, b sãoindependentes. Em geral, lo aliza-se a parte real a no eixo das abs issas (horizontal) e a parteimaginária b, no eixo das ordenadas (verti al). Note que, um número omplexo z pode represen-
Figura 48: Números Complexos.tar um vetor −→z = z. Isto motiva uma nova parametrização do número omplexo z. Pode-se,64

Vibrações Me âni asportanto, representar um número omplexo om notação polar. A representação polar, assim omo a artesiana a ima, pre isa de dois números independentes. Neste aso, os dois númerossão dados pelomódulo (ou magnitude) |z| e a fase ∠z. O módulo é o omprimento do vetor queindi a intensidade do vetor e a fase, um deslo amento angular em relação a direção de referên ia.Esta referên ia é es olhida omo o eixo das abs issas, Fig. 48. Note que o módulo e fase são oordenadas independentes.O módulo do vetor z pode ser obtido apli ando-se o Teorema de Pitágoras:A = |z| =
√
a2 + b2A fase é o ângulo que o vetor z determina om o eixo das abs issas. Logo,θ = ∠z = arctan
(b
a
)Pode-se obter o módulo de outra maneira. De�ne-se por z o número omplexo onjugado de z omoz = a − ibO módulo pode ser obtido pela raiz da multipli ação dos números
A = |z| =√
zz =√
a2 + b2Pode-se voltar a representar um número omplexo na forma artesiana a partir da forma polar.Para isto, basta fazera = A cos(θ)
b = A sin(θ)o que orresponde a uma projeção do vetor em ambos os eixos artesianos. Da expressão a imapode-se es rever quez = a + ib
= A cos(θ) + iA sin(θ) = A(cos(θ) + i sin(θ)) = Aeiθonde a identidade de Euler é dada poreiθ = cos(θ) + i sin(θ)Note que
ei0 = 1 ei π2 = i
eiπ = −1 ei 3π2 = −iOu seja, eiθ é um número omplexo de módulo unitário, pois se tomarmos a multipli ação omo seu omplexo onjugado, tem-se
eiθe−iθ = cos2(θ) + sin2(θ) = 1Representa-se o vetor z porz = |z|eiθ 65

Vibrações Me âni asA multipli ação de um número omplexo, ou analogamente o vetor, por i, equivale a rotaçãodo vetor de 90◦. Por exemplo: seja o vetor z a ima15z∗ = zi = |z|(cos(θ) + i sin(θ))i = |z|(i cos(θ) − sin(θ)) = |z|(− sin(θ) + i cos(θ))Outra maneira de ver isto é tomando
z∗ = |z|eiθi = |z|eiθei π
2 = |z|ei(θ+ π2) = − sin(θ) + i cos(θ)Onde apare em? Em geral, apare em nos seguintes asos:
• na raiz quadrada de um número negativo• na representação de um fasor (vetor em rotação)Referên iasHibbler, R. C. (2011). Dinâmi a: Me âni a para Engenharia, 12 edn, Pearson.Nigro, F. (1998). Notas de Aula de Vibrações Me âni as, Es ola Polité ni a da Univ. de SãoPaulo.Nussenzveig, H. M. (1996). Curso de Físi a Bási a, Vol. 2, Blu her.Rao, S. (2008). Vibrações Me âni as, 4 edn, Pearson Edu ation do Brasil.
15Pode-se rota ionar um vetor de um ângulo θ∗ qualquer tomando-se a multipli ação dos números omplexos orrespondentes ao vetor e à identidade de Euler θ∗:zeiθ∗ = A(cos(θ) + i sin(θ))(cos(θ∗) + i sin(θ∗))
= A(cos(θ) cos(θ∗) − sin(θ) sin(θ∗) + i sin(θ) cos(θ∗) + i sin(θ∗) cos(θ))
= A(cos(θ + θ∗) + i sin(θ + θ∗))
= Aei(θ+θ∗) 66





![Matlab - Apostila [FEI]](https://img.pdfslide.tips/doc/110x75/5571f45549795947648f5c82/matlab-apostila-fei.jpg)























