Embed Size (px)
Citation preview
1
UNIVERSIDAD TÉCNICA FEDERICO SANTA MARÍA
DEPARTAMENTO DE FÍSICA
Ayudantía 2 Física General III (FIS130)
Movimiento Armónico Amortiguado y Forzado Ayudante: Nicolás Corte Díaz
Pregunta 1
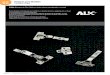
El oscilador amortiguado masa-resorte de la figura tiene
masa 𝐦 = 𝟏𝟎[𝐊𝐠] y 𝐊 = 𝟏𝟎[𝐍 𝐦]⁄ , además en 𝒕 = 𝟎 la masa
se libera del reposo desde la posición 𝑿 = 𝟎, 𝟐 [𝒎]. Calcule la
ecuación de movimiento, así como un gráfico representativo y
analice físicamente lo obtenido para cada una de las siguientes
constantes de amortiguamiento:
a) 𝒃𝑨 = 𝟏[𝑵 ∙ 𝒔 𝒎⁄ ]
b) 𝒃𝑩 = 𝟐𝟎[𝑵 ∙ 𝒔 𝒎⁄ ]
c) 𝒃𝑪 = 𝟑𝟎[𝑵 ∙ 𝒔 𝒎⁄ ]
Para el caso a, imagine que comienza a actuar un agente externo mediante una fuerza 𝐅 = 𝟎, 𝟏𝟓 ⋅ 𝐬𝐢𝐧(𝟒𝐭). Considere que
esta fuerza actúa en 𝒕 = 𝟎 en la posición que el resorte está sin estirar. Calcule la amplitud de la solución particular y
hallar la ecuación en función del tiempo.
SOLUCIÓN:
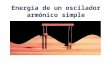
Se procede a realizar el DLC del bloque de masa 𝑚 (puesto a que solo existe desplazamiento en el eje 𝑥 solo se
dibujarán las fuerzas que estén en esta dirección o algunas de sus componentes lo estén):
Donde:
𝐹𝑎: Fuerza de amortiguamiento.
𝐹𝑘: Fuerza del Resorte
𝑥 ∶ Deformación del resorte
Luego:
∑ 𝐹𝑥 = −𝐹𝑎 − 𝐹𝑘 = 𝑚 ⋅ �̈�
−𝑏 ⋅ �̇� − 𝑘 ⋅ 𝑥 = 𝑚 ⋅ �̈�
Finalmente se obtiene:
𝑥
𝑥
𝐹𝑎
𝐹𝑘

2
UNIVERSIDAD TÉCNICA FEDERICO SANTA MARÍA
DEPARTAMENTO DE FÍSICA
�̈� +𝑏
𝑚�̇� +
𝑘
𝑚𝑥 = 0
Que corresponde a la Ecuación Diferencial del Movimiento (EDM).
Para analizar los efectos que tiene los diferentes valores de la constante de amortiguamiento en el movimiento
que presenta el sistema masa – resorte, se debe analizar la solución de la EDM obtenida:
Se puede considerar una solución del tipo:
𝑥(𝑡) = 𝐴𝑒𝜆𝑡
Al reemplazarla en la EDM se obtiene:
(𝜆2 +𝑏
𝑚𝜆 +
𝑘
𝑚) 𝑥 = 0
Como 𝑥 no puede ser nulo se debe buscar las soluciones de 𝜆:
𝜆1,2 = −𝑏
2𝑚± √(
𝑏
2𝑚)
2
−𝑘
𝑚
El valor que se encuentra dentro de la raíz determinará si el movimiento del sistema es sub-amortiguado,
sobre- amortiguado o con amortiguamiento crítico.
Se aprecian dos expresiones dentro de la raíz:
𝛾 =𝑏
2𝑚 ∧ 𝜔𝑜
2 =𝑘
𝑚
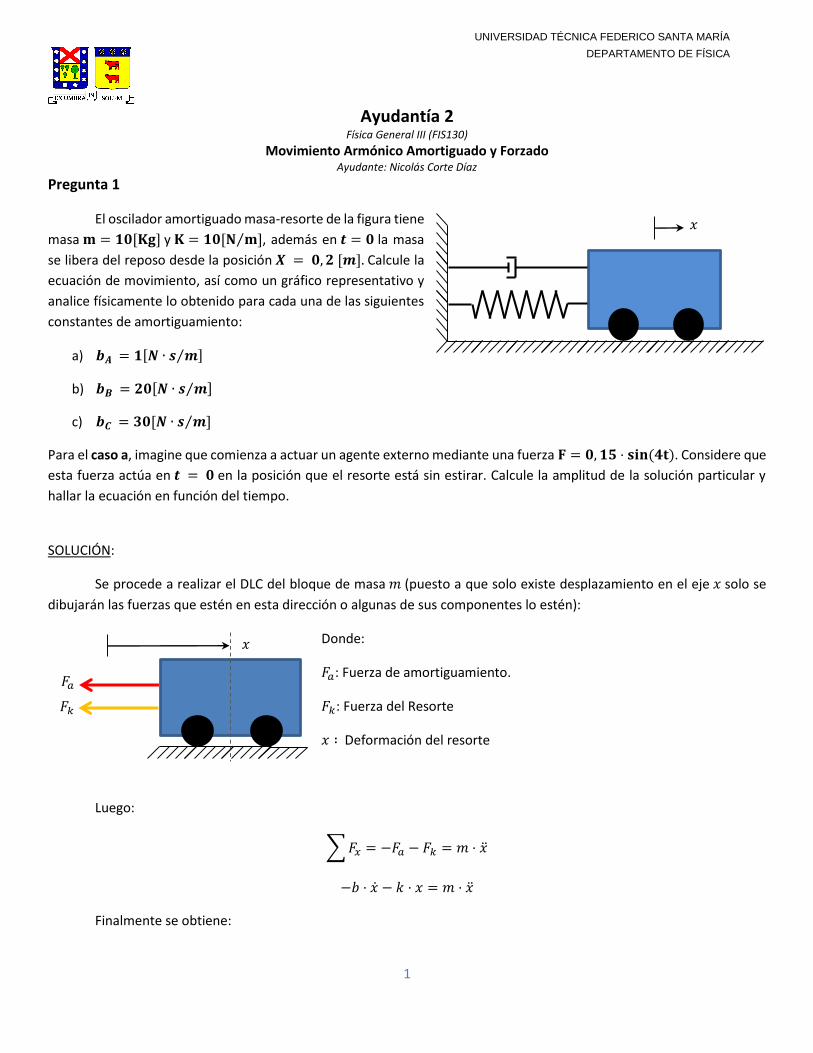
Para el caso 𝑎) se tiene reemplazando los valores:
𝛾 = 0.05 [𝑟𝑎𝑑
𝑠] ⟹ 𝛾2 = 0.0025 [
𝑟𝑎𝑑
𝑠]
2
∧ 𝜔𝑜2 = 1 [
𝑟𝑎𝑑
𝑠]
2
Con lo que 𝛾2 < 𝜔𝑜2 , entonces las soluciones de 𝜆 son imaginarias, por lo que el sistema presentará un
Movimiento Armónico Amortiguado. El gráfico que representa este movimiento del sistema es:
3
UNIVERSIDAD TÉCNICA FEDERICO SANTA MARÍA
DEPARTAMENTO DE FÍSICA
*Omita los valores de las unidades.
Para el caso 𝑏) se tiene reemplazando los valores:
𝛾 = 1 [𝑟𝑎𝑑
𝑠] ⟹ 𝛾2 = 1 [
𝑟𝑎𝑑
𝑠]
2
∧ 𝜔𝑜2 = 1 [
𝑟𝑎𝑑
𝑠]
2
Con lo que 𝛾2 > 𝜔𝑜2, entonces 𝜆 presenta una única solución, por lo que el sistema presentará un Movimiento
Críticamente Amortiguado. El gráfico que representa este movimiento del sistema es:
*Omita los valores de las unidades.
-0,2
-0,15
-0,1
-0,05
0
0,05
0,1
0,15
0,2
0,25
0 10 20 30 40 50 60 70 80
Movimiento Armónico Amortiguado
0
0,05
0,1
0,15
0,2
0,25
0 1 2 3 4 5 6 7 8
Movimiento Amortiguado Crítico
4
UNIVERSIDAD TÉCNICA FEDERICO SANTA MARÍA
DEPARTAMENTO DE FÍSICA
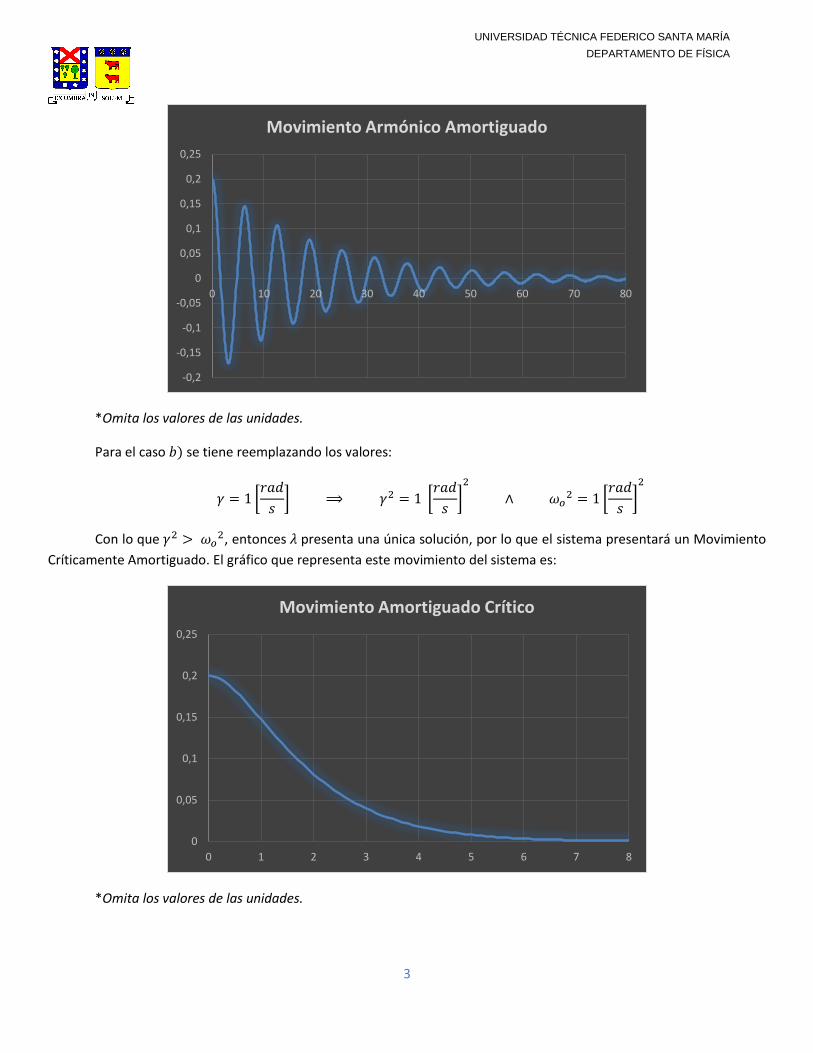
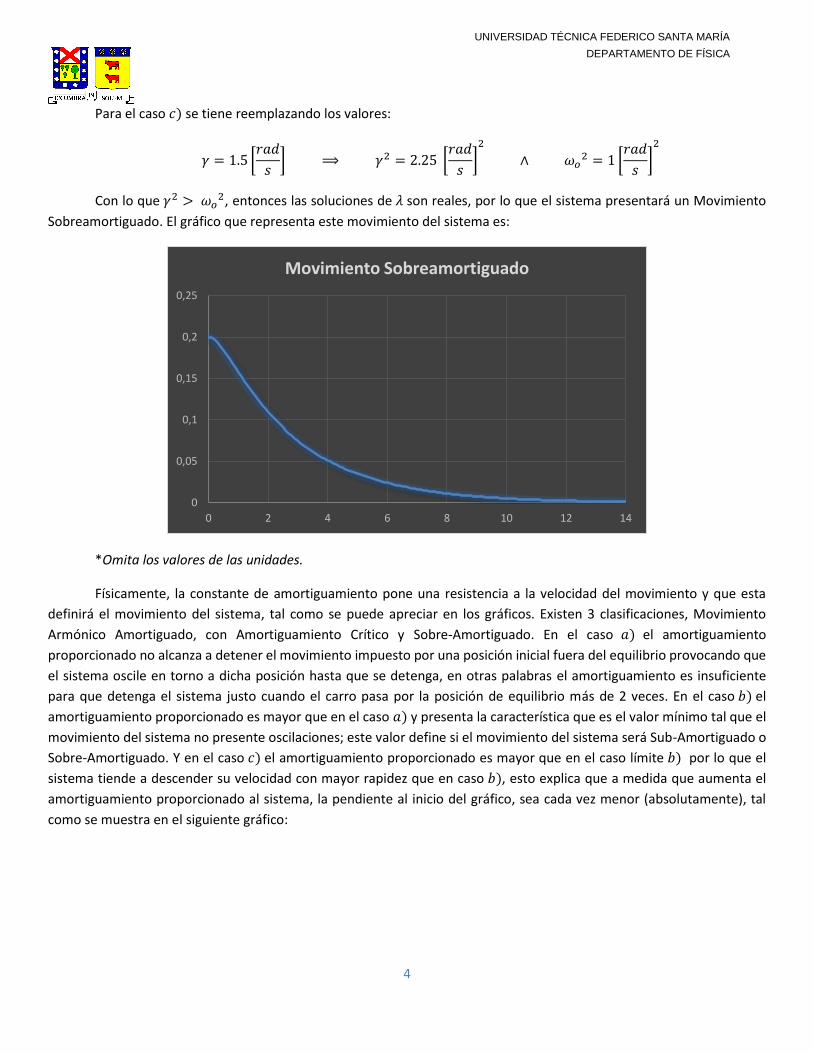
Para el caso 𝑐) se tiene reemplazando los valores:
𝛾 = 1.5 [𝑟𝑎𝑑
𝑠] ⟹ 𝛾2 = 2.25 [
𝑟𝑎𝑑
𝑠]
2
∧ 𝜔𝑜2 = 1 [
𝑟𝑎𝑑
𝑠]
2
Con lo que 𝛾2 > 𝜔𝑜2, entonces las soluciones de 𝜆 son reales, por lo que el sistema presentará un Movimiento
Sobreamortiguado. El gráfico que representa este movimiento del sistema es:
*Omita los valores de las unidades.
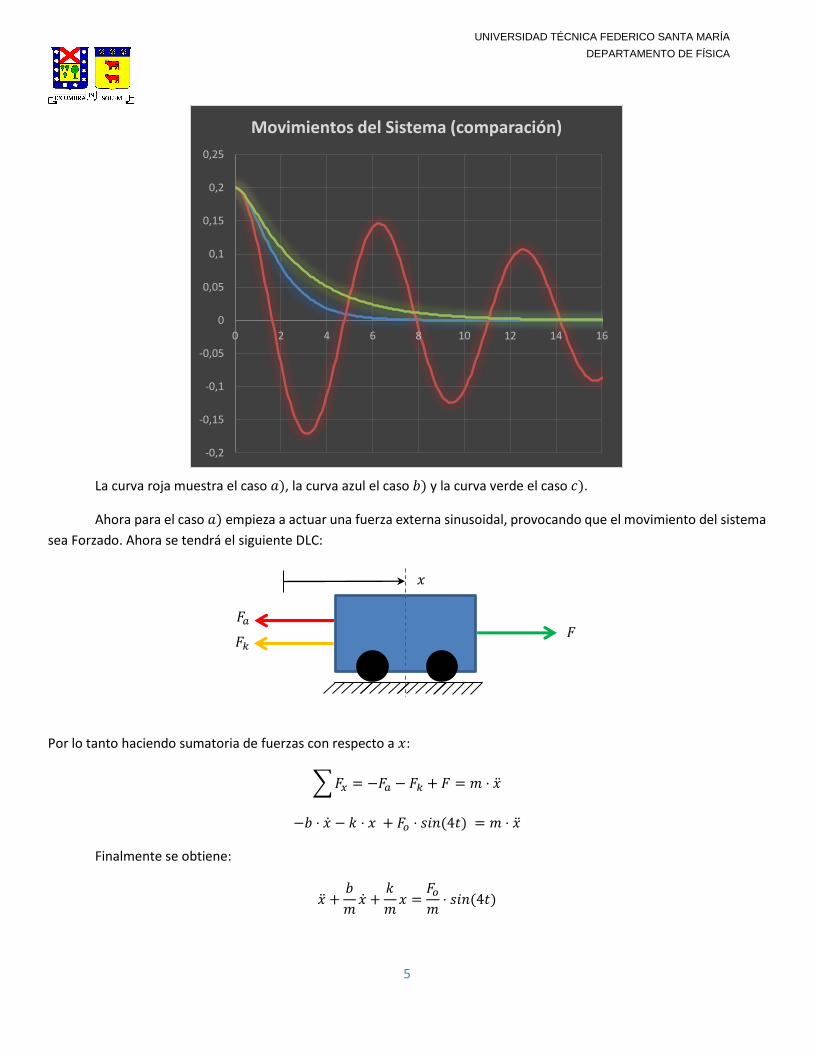
Físicamente, la constante de amortiguamiento pone una resistencia a la velocidad del movimiento y que esta
definirá el movimiento del sistema, tal como se puede apreciar en los gráficos. Existen 3 clasificaciones, Movimiento
Armónico Amortiguado, con Amortiguamiento Crítico y Sobre-Amortiguado. En el caso 𝑎) el amortiguamiento
proporcionado no alcanza a detener el movimiento impuesto por una posición inicial fuera del equilibrio provocando que
el sistema oscile en torno a dicha posición hasta que se detenga, en otras palabras el amortiguamiento es insuficiente
para que detenga el sistema justo cuando el carro pasa por la posición de equilibrio más de 2 veces. En el caso 𝑏) el
amortiguamiento proporcionado es mayor que en el caso 𝑎) y presenta la característica que es el valor mínimo tal que el
movimiento del sistema no presente oscilaciones; este valor define si el movimiento del sistema será Sub-Amortiguado o
Sobre-Amortiguado. Y en el caso 𝑐) el amortiguamiento proporcionado es mayor que en el caso límite 𝑏) por lo que el
sistema tiende a descender su velocidad con mayor rapidez que en caso 𝑏), esto explica que a medida que aumenta el
amortiguamiento proporcionado al sistema, la pendiente al inicio del gráfico, sea cada vez menor (absolutamente), tal
como se muestra en el siguiente gráfico:
0
0,05
0,1
0,15
0,2
0,25
0 2 4 6 8 10 12 14
Movimiento Sobreamortiguado
5
UNIVERSIDAD TÉCNICA FEDERICO SANTA MARÍA
DEPARTAMENTO DE FÍSICA
La curva roja muestra el caso 𝑎), la curva azul el caso 𝑏) y la curva verde el caso 𝑐).
Ahora para el caso 𝑎) empieza a actuar una fuerza externa sinusoidal, provocando que el movimiento del sistema
sea Forzado. Ahora se tendrá el siguiente DLC:
Por lo tanto haciendo sumatoria de fuerzas con respecto a 𝑥:
∑ 𝐹𝑥 = −𝐹𝑎 − 𝐹𝑘 + 𝐹 = 𝑚 ⋅ �̈�
−𝑏 ⋅ �̇� − 𝑘 ⋅ 𝑥 + 𝐹𝑜 ⋅ 𝑠𝑖𝑛(4𝑡) = 𝑚 ⋅ �̈�
Finalmente se obtiene:
�̈� +𝑏
𝑚�̇� +
𝑘
𝑚𝑥 =
𝐹𝑜
𝑚⋅ 𝑠𝑖𝑛(4𝑡)
-0,2
-0,15
-0,1
-0,05
0
0,05
0,1
0,15
0,2
0,25
0 2 4 6 8 10 12 14 16
Movimientos del Sistema (comparación)
𝑥
𝐹𝑎
𝐹𝑘 𝐹

6
UNIVERSIDAD TÉCNICA FEDERICO SANTA MARÍA
DEPARTAMENTO DE FÍSICA
De la ecuación diferencial obtenida se observa que el carrito de masa 𝑚 tendrá dos respuestas al movimiento,
una respuesta en MAA correspondiente a la solución homogénea 𝑥𝐻 que desaparece en el tiempo y una respuesta
estacionaria correspondiente a la solución particular 𝑥𝑃 causado por la fuerza forzada.
La solución de 𝑥𝐻, proviene de la ecuación:
�̈� +𝑏
𝑚�̇� +
𝑘
𝑚𝑥 = 0
Cuya solución es:
𝑥𝐻(𝑡) = 𝐴 ⋅ cos(𝜔𝑜𝑡 − 𝜙)
Por otro lado la solución de 𝑥𝑃, se obtiene de la ecuación:
�̈�𝑃 +𝑏
𝑚�̇�𝑃 +
𝑘
𝑚𝑥𝑃 =
𝐹𝑜
𝑚⋅ 𝑠𝑖𝑛(4𝑡)
Cuya solución es:
𝑥𝑃(𝑡) = 𝐵 ⋅ sin(4𝑡 − 𝜓)
Donde 𝐵 y 𝜓 se obtienen de las ecuaciones:
𝐵 = (
𝐹0
𝑚)
√(𝜔𝑜2 − 𝜔2)2 + 4𝛾2𝜔𝑜
2
tan(𝜓) =2𝛾𝜔
(𝜔𝑜2 − 𝜔2)
Con 𝑚 = 10 [𝑘𝑔], 𝜔 = 4 [𝑟𝑎𝑑
𝑠] , 𝜔𝑂 = 1 [
𝑟𝑎𝑑
𝑠], 𝛾 = 0.05 [
𝑟𝑎𝑑
𝑠] y 𝐹𝑜 = 0.15 [𝑁] se obtiene:
𝐵 = 0.001 [𝑚]
𝜓 = −0.03 [𝑟𝑎𝑑]
Entonces la función de 𝑥(𝑡) es:
𝑥(𝑡) = 𝑥𝐻(𝑡) + 𝑥𝑃(𝑡)
𝑥(𝑡) = 𝐴 ⋅ cos(𝜔𝑜𝑡 − 𝜙) + 𝐵 ⋅ sin(4𝑡 − 𝜓)
Los valores de 𝐴 y 𝜙 se obtienen de las condiciones iniciales del problema:
𝑥(0) = 0
�̇�(0) = 0

7
UNIVERSIDAD TÉCNICA FEDERICO SANTA MARÍA
DEPARTAMENTO DE FÍSICA
Y se tiene que:
�̇�(𝑡) = −𝐴𝜔𝑜 ⋅ sin(𝜔𝑜𝑡 − 𝜙) + 4𝐵 ⋅ cos(4𝑡 − 𝜓)
Entonces:
𝑥(0) = 𝐴 ⋅ cos(−𝜙) + 𝐵 ⋅ sin(−𝜓) = 0
�̇�(𝑡) = −𝐴𝜔𝑜 ⋅ sin(−𝜙) + 4𝐵 ⋅ cos(−𝜓) = 0
𝐴 ⋅ cos(−𝜙) = −𝐵 ⋅ sin(−𝜓)
4𝐵 ⋅ cos(−𝜓) = 𝐴𝜔𝑜 ⋅ sin(−𝜙)
Del sistema de ecuaciones se obtiene:
𝜙 = 0.12 [𝑟𝑎𝑑]
𝐴 = −0.03 [𝑚𝑚]
Finalmente se tiene que la ecuación es:
𝑥(𝑡) = −0.03 [𝑚𝑚] ⋅ cos(𝑡 − 0.12 [𝑟𝑎𝑑]) + 1[𝑚𝑚] ⋅ sin(4𝑡 + 0.03[𝑟𝑎𝑑])

8
UNIVERSIDAD TÉCNICA FEDERICO SANTA MARÍA
DEPARTAMENTO DE FÍSICA
Pregunta 2
Un sistema conformado por una masa unida a un resorte se encuentra realizando un movimiento oscilatorio
amortiguado de acuerdo a la siguiente ecuación:
𝑦(𝑥) = 𝐴𝑂𝑒−𝛾𝑡cos (𝜔𝑡)
Se observa que la energía del oscilador se reduce a 1/13 de su valor inicial al completar las primeras 100 oscilaciones.
Calcule al cabo de cuantas oscilaciones la amplitud del movimiento será igual a la octava parte de la amplitud original.
SOLUCIÓN:
Inicialmente se tiene que la función de la Energía Mecánica para un Movimiento Armónico Amortiguado (MAA)
está definida como:
𝐸(𝑡) = 𝐸𝑂𝑒−2𝛾𝑡
En este caso se tiene que al cumplir la primeras 100 oscilaciones, es decir transcurrido un tiempo 𝑡 = 100𝑇 donde
𝑇 es el periodo del sistema, la energía mecánica se reduce a 1/13 de su valor inicial, es decir:
𝐸(100𝑇) = 𝐸𝑂𝑒−200𝛾𝑇 =1
13𝐸𝑂
Entonces:
𝑒−200𝛾𝑇 =1
13
−200𝛾𝑇 ⋅ ln(𝑒) = ln (1
13) ⟹ −200𝛾𝑇 = ln (
1
13)
⟹ 𝑇 = −ln (
113)
200𝛾
Ahora que ya se tiene la expresión del periodo 𝑇 del sistema, se debe encontrar la expresión que define el tiempo
transcurrido 𝑡1 que demora el sistema en reducir su amplitud inicial a la octava parte. Tal tiempo 𝑡1 se encuentra como:
𝑥(𝑡1) = 𝐴𝑂𝑒−𝛾𝑡1 cos(𝜔𝑡1) =1
8𝐴𝑂
Pero nos interesa solo la parte de la amplitud, entonces:
𝑒−𝛾𝑡1 =1
8
−𝜸𝒕𝟏 = 𝐥𝐧 (𝟏
𝟖)
/ 𝑙𝑛
/ 𝑙𝑛
9
UNIVERSIDAD TÉCNICA FEDERICO SANTA MARÍA
DEPARTAMENTO DE FÍSICA
𝑡1 = −ln (
18
)
𝛾
Entonces las cantidades de oscilaciones que transcurren en un tiempo 𝑡1 es:
𝑛 = 𝑡1
𝑇=
ln (18
)
𝛾
ln (1
13)
200𝛾
=200 ln (
18
)
ln (1
13)= 162.143 [𝑜𝑠𝑐𝑖𝑙𝑎𝑐𝑖𝑜𝑛𝑒𝑠]
10
UNIVERSIDAD TÉCNICA FEDERICO SANTA MARÍA
DEPARTAMENTO DE FÍSICA
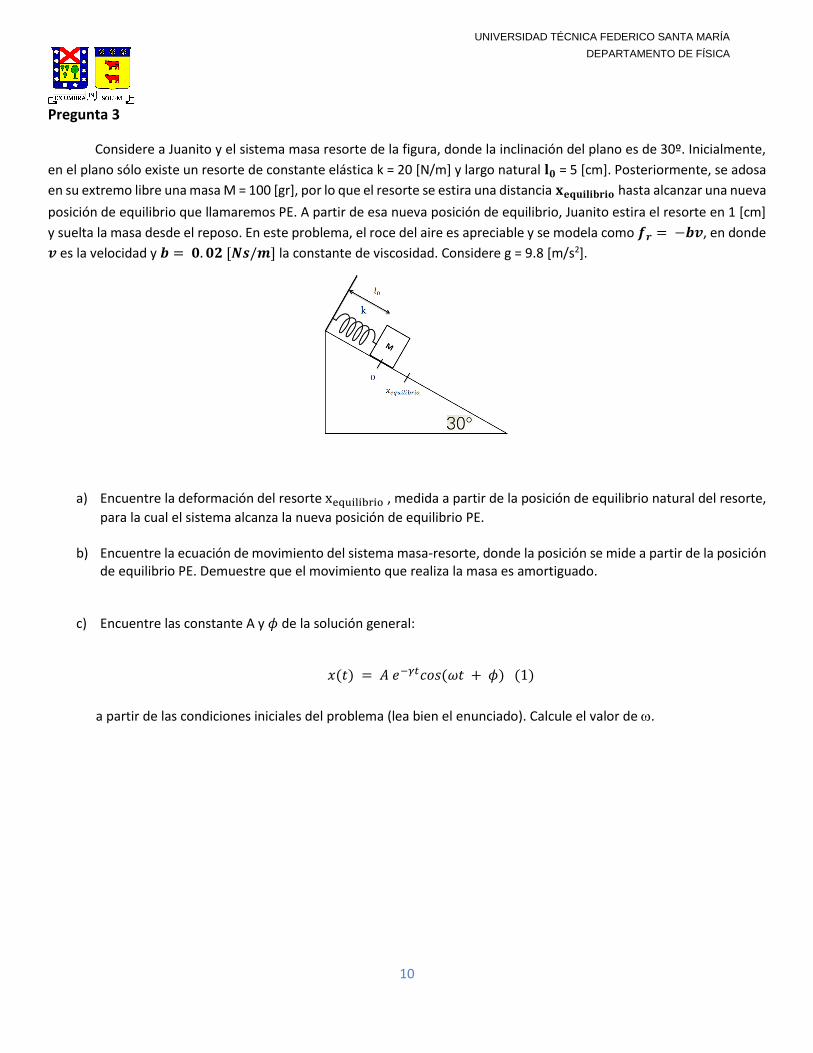
Pregunta 3
Considere a Juanito y el sistema masa resorte de la figura, donde la inclinación del plano es de 30º. Inicialmente,
en el plano sólo existe un resorte de constante elástica k = 20 [N/m] y largo natural 𝐥𝟎 = 5 [cm]. Posteriormente, se adosa
en su extremo libre una masa M = 100 [gr], por lo que el resorte se estira una distancia 𝐱𝐞𝐪𝐮𝐢𝐥𝐢𝐛𝐫𝐢𝐨 hasta alcanzar una nueva
posición de equilibrio que llamaremos PE. A partir de esa nueva posición de equilibrio, Juanito estira el resorte en 1 [cm]
y suelta la masa desde el reposo. En este problema, el roce del aire es apreciable y se modela como 𝒇𝒓 = −𝒃𝒗, en donde
𝒗 es la velocidad y 𝒃 = 𝟎. 𝟎𝟐 [𝑵𝒔/𝒎] la constante de viscosidad. Considere g = 9.8 [m/s2].
a) Encuentre la deformación del resorte xequilibrio , medida a partir de la posición de equilibrio natural del resorte,
para la cual el sistema alcanza la nueva posición de equilibrio PE.
b) Encuentre la ecuación de movimiento del sistema masa-resorte, donde la posición se mide a partir de la posición de equilibrio PE. Demuestre que el movimiento que realiza la masa es amortiguado.
c) Encuentre las constante A y 𝜙 de la solución general:
𝑥(𝑡) = 𝐴 𝑒−𝛾𝑡𝑐𝑜𝑠(𝜔𝑡 + 𝜙) (1)
a partir de las condiciones iniciales del problema (lea bien el enunciado). Calcule el valor de .
11
UNIVERSIDAD TÉCNICA FEDERICO SANTA MARÍA
DEPARTAMENTO DE FÍSICA
SOLUCIÓN:
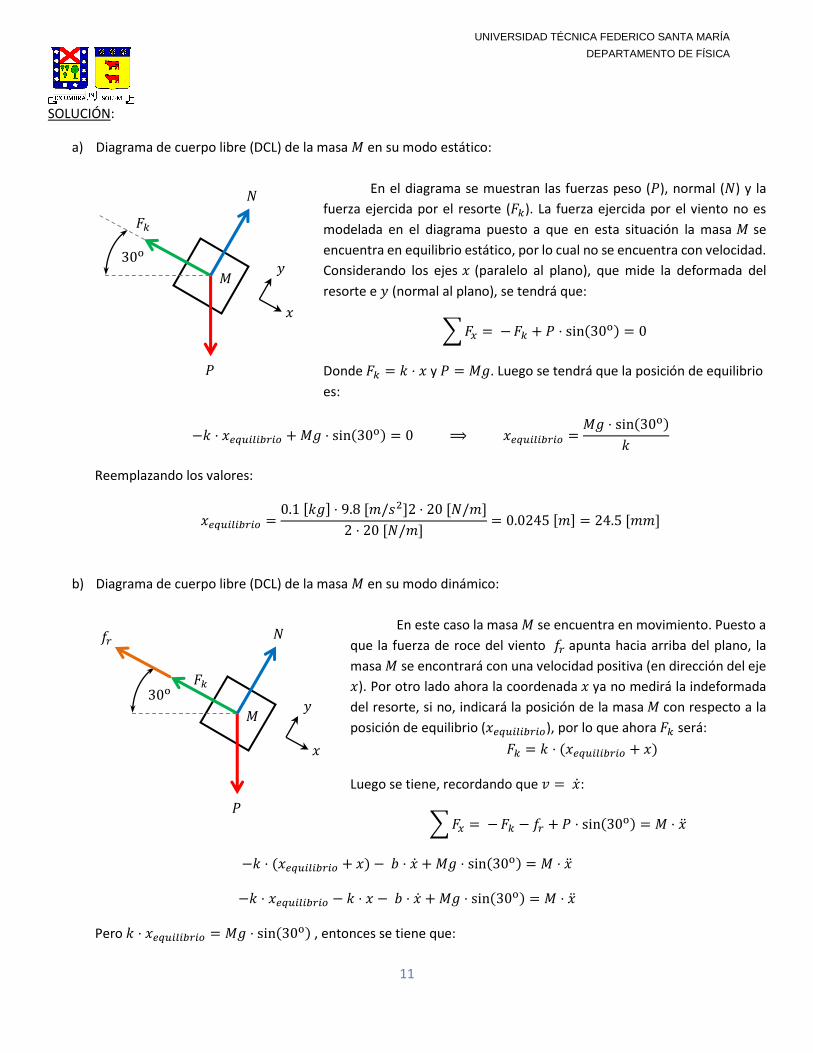
a) Diagrama de cuerpo libre (DCL) de la masa 𝑀 en su modo estático:
En el diagrama se muestran las fuerzas peso (𝑃), normal (𝑁) y la
fuerza ejercida por el resorte (𝐹𝑘). La fuerza ejercida por el viento no es
modelada en el diagrama puesto a que en esta situación la masa 𝑀 se
encuentra en equilibrio estático, por lo cual no se encuentra con velocidad.
Considerando los ejes 𝑥 (paralelo al plano), que mide la deformada del
resorte e 𝑦 (normal al plano), se tendrá que:
∑ 𝐹𝑥 = − 𝐹𝑘 + 𝑃 ⋅ sin(30o) = 0
Donde 𝐹𝑘 = 𝑘 ⋅ 𝑥 y 𝑃 = 𝑀𝑔. Luego se tendrá que la posición de equilibrio
es:
−𝑘 ⋅ 𝑥𝑒𝑞𝑢𝑖𝑙𝑖𝑏𝑟𝑖𝑜 + 𝑀𝑔 ⋅ sin(30o) = 0 ⟹ 𝑥𝑒𝑞𝑢𝑖𝑙𝑖𝑏𝑟𝑖𝑜 =𝑀𝑔 ⋅ sin(30o)
𝑘
Reemplazando los valores:
𝑥𝑒𝑞𝑢𝑖𝑙𝑖𝑏𝑟𝑖𝑜 =0.1 [𝑘𝑔] ⋅ 9.8 [𝑚/𝑠2]2 ⋅ 20 [𝑁/𝑚]
2 ⋅ 20 [𝑁/𝑚]= 0.0245 [𝑚] = 24.5 [𝑚𝑚]
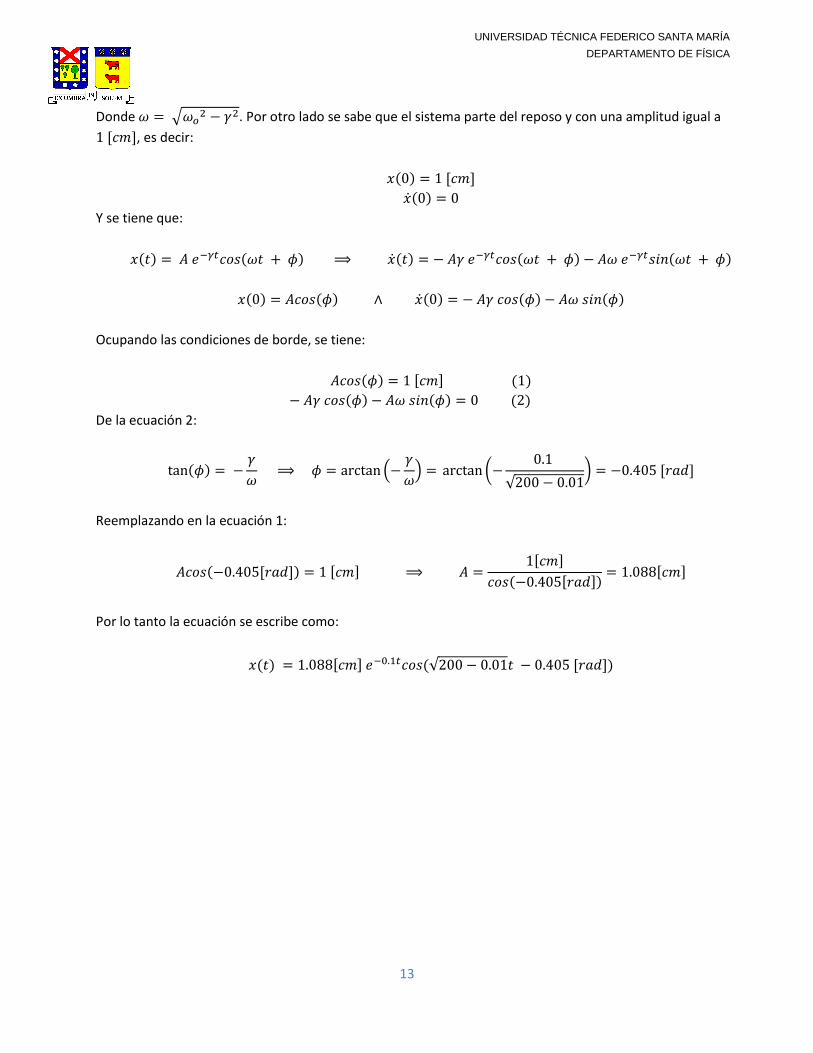
b) Diagrama de cuerpo libre (DCL) de la masa 𝑀 en su modo dinámico:
En este caso la masa 𝑀 se encuentra en movimiento. Puesto a
que la fuerza de roce del viento 𝑓𝑟 apunta hacia arriba del plano, la
masa 𝑀 se encontrará con una velocidad positiva (en dirección del eje
𝑥). Por otro lado ahora la coordenada 𝑥 ya no medirá la indeformada
del resorte, si no, indicará la posición de la masa 𝑀 con respecto a la
posición de equilibrio (𝑥𝑒𝑞𝑢𝑖𝑙𝑖𝑏𝑟𝑖𝑜), por lo que ahora 𝐹𝑘 será:
𝐹𝑘 = 𝑘 ⋅ (𝑥𝑒𝑞𝑢𝑖𝑙𝑖𝑏𝑟𝑖𝑜 + 𝑥)
Luego se tiene, recordando que 𝑣 = �̇�:
∑ 𝐹𝑥 = − 𝐹𝑘 − 𝑓𝑟 + 𝑃 ⋅ sin(30o) = 𝑀 ⋅ �̈�
−𝑘 ⋅ (𝑥𝑒𝑞𝑢𝑖𝑙𝑖𝑏𝑟𝑖𝑜 + 𝑥) − 𝑏 ⋅ �̇� + 𝑀𝑔 ⋅ sin(30o) = 𝑀 ⋅ �̈�
−𝑘 ⋅ 𝑥𝑒𝑞𝑢𝑖𝑙𝑖𝑏𝑟𝑖𝑜 − 𝑘 ⋅ 𝑥 − 𝑏 ⋅ �̇� + 𝑀𝑔 ⋅ sin(30o) = 𝑀 ⋅ �̈�
Pero 𝑘 ⋅ 𝑥𝑒𝑞𝑢𝑖𝑙𝑖𝑏𝑟𝑖𝑜 = 𝑀𝑔 ⋅ sin(30o) , entonces se tiene que:
𝑀
30o 𝑦
𝑥
𝑁
𝐹𝑘
𝑃
𝑀
30o 𝑦
𝑥
𝑁
𝑃
𝐹𝑘
𝑓𝑟

12
UNIVERSIDAD TÉCNICA FEDERICO SANTA MARÍA
DEPARTAMENTO DE FÍSICA
−𝑘 ⋅ 𝑥 − 𝑏 ⋅ �̇� = 𝑀 ⋅ �̈�
Por lo tanto se tiene la siguiente ecuación:
�̈� +𝑏
𝑀�̇� +
𝑘
𝑀𝑥 = 0
MÉTODO 1:
Factorizando la ecuación por los operadores diferenciales se tiene:
(𝜆2 +𝑏
𝑀𝜆 +
𝑘
𝑀) ⋅ 𝑥 = 0
Luego las soluciones de operador es:
𝜆1,2 =−
𝑏𝑀
± √(𝑏𝑀
)2
−4𝑘𝑀
2= −
𝑏
2𝑀± √(
𝑏
2𝑀)
2
−𝑘
𝑀
Luego llamamos a:
𝛾 =𝑏
2𝑀=
0.02 [𝑁𝑠/𝑚]
0.2 [𝑘𝑔]= 0.1 [𝑟𝑎𝑑/𝑠] ∧ 𝜔𝑜
2 =𝑘
𝑀=
20 [𝑁/𝑚]
0.1 [𝑘𝑔]= 200 [𝑟𝑎𝑑/𝑠]2
𝛾 < 𝜔𝑜
Y se tiene que:
𝜆1,2 = −𝛾 ± √(𝛾)2 − 𝜔𝑜2 = −0.1 [𝑟𝑎𝑑/𝑠] ± √(0.1)2 − 200[𝑟𝑎𝑑/𝑠] ∈ 𝕀
Por lo tanto, como la solución es imaginaria, el sistema describirá un movimiento armónico amortiguado (MAA).
MÉTODO 2:
De la ecuación diferencial, se desprenden 2 tipos de frecuencias:
𝛾 =𝑏
2𝑀=
0.02 [𝑁𝑠/𝑚]
0.2 [𝑘𝑔]= 0.1 [𝑟𝑎𝑑/𝑠] ∧ 𝜔𝑜
2 =𝑘
𝑀=
20 [𝑁/𝑚]
0.1 [𝑘𝑔]= 200 [𝑟𝑎𝑑/𝑠]2
⟹ 𝛾 < 𝜔𝑜
Por lo que la frecuencia angular amortiguada (𝛾) es menor que la frecuencia angular natural del sistema 𝜔𝑜,
entonces se tiene que el sistema se mueve con un movimiento armónico amortiguado (MAA).
c) Se sabe que la solución de la ecuación diferencial del MAA tiene la forma:
𝑥(𝑡) = 𝐴 𝑒−𝛾𝑡𝑐𝑜𝑠(𝜔𝑡 + 𝜙)
13
UNIVERSIDAD TÉCNICA FEDERICO SANTA MARÍA
DEPARTAMENTO DE FÍSICA
Donde 𝜔 = √𝜔𝑜2 − 𝛾2. Por otro lado se sabe que el sistema parte del reposo y con una amplitud igual a
1 [𝑐𝑚], es decir:
𝑥(0) = 1 [𝑐𝑚]
�̇�(0) = 0
Y se tiene que:
𝑥(𝑡) = 𝐴 𝑒−𝛾𝑡𝑐𝑜𝑠(𝜔𝑡 + 𝜙) ⟹ �̇�(𝑡) = − 𝐴𝛾 𝑒−𝛾𝑡𝑐𝑜𝑠(𝜔𝑡 + 𝜙) − 𝐴𝜔 𝑒−𝛾𝑡𝑠𝑖𝑛(𝜔𝑡 + 𝜙)
𝑥(0) = 𝐴𝑐𝑜𝑠(𝜙) ∧ �̇�(0) = − 𝐴𝛾 𝑐𝑜𝑠(𝜙) − 𝐴𝜔 𝑠𝑖𝑛(𝜙)
Ocupando las condiciones de borde, se tiene:
𝐴𝑐𝑜𝑠(𝜙) = 1 [𝑐𝑚] (1)
− 𝐴𝛾 𝑐𝑜𝑠(𝜙) − 𝐴𝜔 𝑠𝑖𝑛(𝜙) = 0 (2)
De la ecuación 2:
tan(𝜙) = −𝛾
𝜔 ⟹ 𝜙 = arctan (−
𝛾
𝜔) = arctan (−
0.1
√200 − 0.01) = −0.405 [𝑟𝑎𝑑]
Reemplazando en la ecuación 1:
𝐴𝑐𝑜𝑠(−0.405[𝑟𝑎𝑑]) = 1 [𝑐𝑚] ⟹ 𝐴 =1[𝑐𝑚]
𝑐𝑜𝑠(−0.405[𝑟𝑎𝑑])= 1.088[𝑐𝑚]
Por lo tanto la ecuación se escribe como:
𝑥(𝑡) = 1.088[𝑐𝑚] 𝑒−0.1𝑡𝑐𝑜𝑠(√200 − 0.01𝑡 − 0.405 [𝑟𝑎𝑑])
14
UNIVERSIDAD TÉCNICA FEDERICO SANTA MARÍA
DEPARTAMENTO DE FÍSICA
Pregunta 4
Considere un péndulo formada por una masa 𝑚 de 20 [𝑔], unida a una cuerda de largo 𝐿 (10 [𝑐𝑚]) y masa
despreciable, que se sostiene estático a 20° de la vertical. Al ponerse en movimiento la masa de aire ejerce una fuerza
directamente proporcional a la velocidad de ésta, con coeficiente de proporcionalidad 𝑏 = 0.27 [(𝑁 ⋅ 𝑠)/𝑚].
a) Encuentre la función (𝑡) que representa el movimiento de la masa.
b) Grafique la función (𝑡) en función del tiempo.
c) Encuentre el tiempo que debe transcurrir para que la amplitud de oscilación disminuya a un 30% del valor
inicial.
d) Suponga que la masa aumenta al doble y la longitud disminuye a la mitad, así como también el coeficiente "𝑏" se
modifica para generar un amortiguamiento crítico. ¿Qué debe ocurrir con dicho valor?, calcule.
SOLUCIÓN:
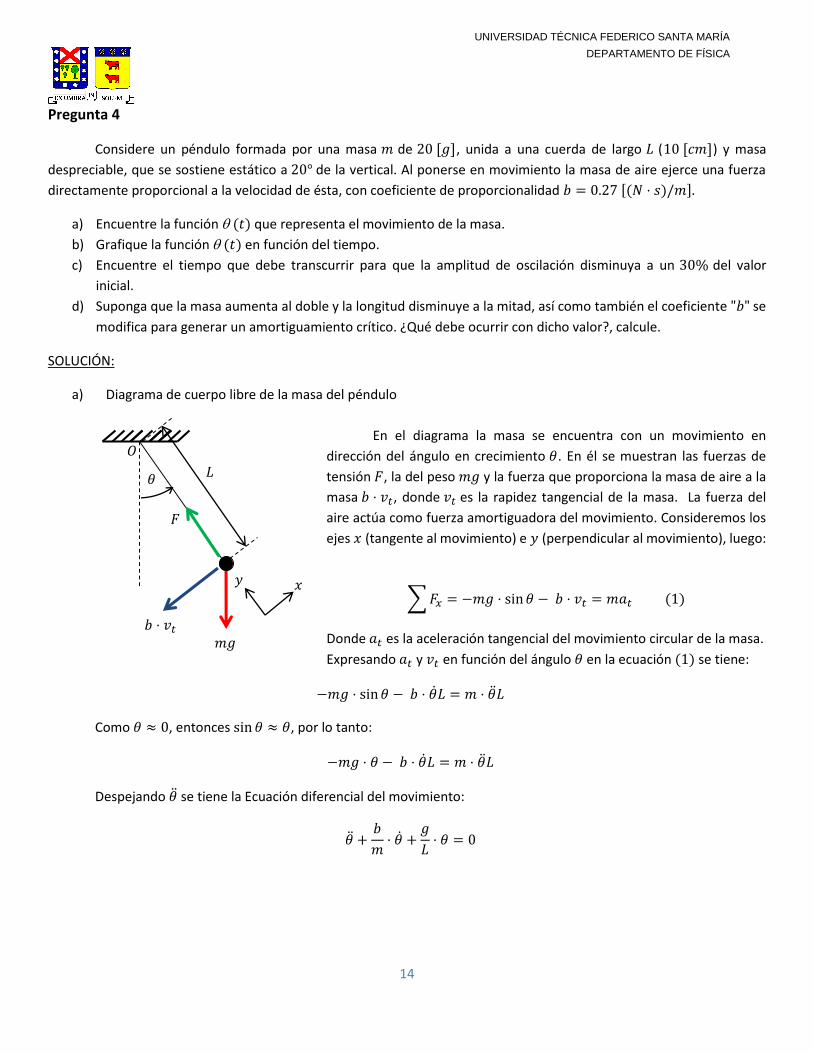
a) Diagrama de cuerpo libre de la masa del péndulo
En el diagrama la masa se encuentra con un movimiento en
dirección del ángulo en crecimiento 𝜃. En él se muestran las fuerzas de
tensión 𝐹, la del peso 𝑚𝑔 y la fuerza que proporciona la masa de aire a la
masa 𝑏 ⋅ 𝑣𝑡, donde 𝑣𝑡 es la rapidez tangencial de la masa. La fuerza del
aire actúa como fuerza amortiguadora del movimiento. Consideremos los
ejes 𝑥 (tangente al movimiento) e 𝑦 (perpendicular al movimiento), luego:
∑ 𝐹𝑥 = −𝑚𝑔 ⋅ sin 𝜃 − 𝑏 ⋅ 𝑣𝑡 = 𝑚𝑎𝑡 (1)
Donde 𝑎𝑡 es la aceleración tangencial del movimiento circular de la masa.
Expresando 𝑎𝑡 y 𝑣𝑡 en función del ángulo 𝜃 en la ecuación (1) se tiene:
−𝑚𝑔 ⋅ sin 𝜃 − 𝑏 ⋅ �̇�𝐿 = 𝑚 ⋅ �̈�𝐿
Como 𝜃 ≈ 0, entonces sin 𝜃 ≈ 𝜃, por lo tanto:
−𝑚𝑔 ⋅ 𝜃 − 𝑏 ⋅ �̇�𝐿 = 𝑚 ⋅ �̈�𝐿
Despejando �̈� se tiene la Ecuación diferencial del movimiento:
�̈� +𝑏
𝑚⋅ �̇� +
𝑔
𝐿⋅ 𝜃 = 0
𝜃
𝑂
𝑚𝑔
𝐿
𝑏 ⋅ 𝑣𝑡
𝐹
𝑥 𝑦

15
UNIVERSIDAD TÉCNICA FEDERICO SANTA MARÍA
DEPARTAMENTO DE FÍSICA
MÉTODO 1:
La ecuación diferencial del movimiento es del tipo homogénea. Luego se factoriza esta ecuación por un operador
diferencia 𝐷:
�̈� +𝑏
𝑚⋅ �̇� +
𝑔
𝐿⋅ 𝜃 = 0 ⟺ (𝐷2 +
𝑏
𝑚𝐷 +
𝑔
𝐿) ⋅ 𝜃 = 0
Como 𝜃 ≠ 0 se tiene que las soluciones se encuentran en el paréntesis. Por lo tanto se tiene que las soluciones
son:
𝐷1,2 =−
𝑏𝑚
± √ 𝑏2
𝑚2 − 4𝑔𝐿
2=
−𝑏
2𝑚± √(
𝑏
2𝑚)
2
−𝑔
𝐿
Llamemos:
𝛾 =𝑏
2𝑚 ∧ 𝜔2 =
𝑔
𝐿
Se debe observar el valor que se tiene dentro del discriminante para poder determinar la solución final.
Reemplazando los valores 𝑏, 𝑚, 𝑔, 𝐿:
𝛾 = 0.27 [(𝑁 ⋅ 𝑠)/𝑚]
2 ⋅ 0.02[𝑘𝑔]= 6.75[𝑟𝑎𝑑/𝑠]
𝜔2 =9.81 [𝑚/𝑠2]
0.1 [𝑚]= 98.1[𝑟𝑎𝑑/𝑠]
Entonces:
√𝛾2 − 𝜔2 = √6.752 − 98.1 ∈ 𝑖𝑚𝑎𝑔𝑖𝑛𝑎𝑟𝑖𝑜
Por lo cual se está frente de un movimiento armónico amortiguado. Entonces se tiene que la solución de la
ecuación diferencial es:
𝜃(𝑡) = 𝑒−𝛾𝑡 [𝐴 sin (√𝜔2 − 𝛾2 ⋅ 𝑡) + 𝐵 cos (√𝜔2 − 𝛾2 ⋅ 𝑡)]
Luego evaluando las condiciones iniciales se obtienen los valores de las constantes 𝐴 y 𝐵. Inicialmente se tiene
que 𝜃(0) = 20º = 𝜋9⁄ [𝑟𝑎𝑑], entonces:
𝜃(0) = 20º = 𝜋9⁄ [𝑟𝑎𝑑] = 𝐵
Por otro lado el movimiento parte del reposo, esto quiere decir que �̇�(0) = 0. Luego:

16
UNIVERSIDAD TÉCNICA FEDERICO SANTA MARÍA
DEPARTAMENTO DE FÍSICA
�̇�(𝑡) = 𝑒−𝛾𝑡 [𝐴 ⋅ √𝜔2 − 𝛾2 ⋅ cos (√𝜔2 − 𝛾2 ⋅ 𝑡) − 𝐵 √𝜔2 − 𝛾2 ⋅ sin (√𝜔2 − 𝛾2 ⋅ 𝑡)]
− 𝛾𝑒−𝛾𝑡 [𝐴 sin (√𝜔2 − 𝛾2 ⋅ 𝑡) + 𝐵 cos (√𝜔2 − 𝛾2 ⋅ 𝑡)]
Entonces:
�̇�(0) = 0 = 𝐴 ⋅ √𝜔2 − 𝛾2 − 𝛾𝐵 ⟹ 𝐴 =𝛾𝐵
√𝜔2 − 𝛾2 ⟹ 𝐴 = 0.10𝜋
Reemplazando todos los valores encontrados se tiene que la ecuación de posición angular de la masa 𝑚 es:
𝜃(𝑡) = 𝑒−6.75[𝑟𝑎𝑑 𝑠⁄ ]𝑡 [0.10𝜋 sin(7.25[𝑟𝑎𝑑 𝑠⁄ ] ⋅ 𝑡) +𝜋
9 [𝑟𝑎𝑑] cos(7.25[𝑟𝑎𝑑 𝑠⁄ ] ⋅ 𝑡)]
MÉTODO 2:
Se observa que la ecuación diferencial del movimiento es de un movimiento Amortiguado. Ahora se verifica que
tipo de amortiguamiento es.
Llamemos
𝛾 =𝑏
2𝑚 ∧ 𝜔2 =
𝑔
𝐿
Reemplazando los valores 𝑏, 𝑚, 𝑔, 𝐿:
𝛾 = 0.27 [(𝑁 ⋅ 𝑠)/𝑚]
2 ⋅ 0.02[𝑘𝑔]= 6.75[𝑟𝑎𝑑/𝑠]
𝜔2 =9.81 [𝑚/𝑠2]
0.1 [𝑚]= 98.1[𝑟𝑎𝑑/𝑠]
Luego:
√𝛾2 − 𝜔2 = √6.752 − 98.1 ∈ 𝑖𝑚𝑎𝑔𝑖𝑛𝑎𝑟𝑖𝑜
Por lo cual el movimiento que describe la partícula es un Movimiento Armónico Amortiguado, el cual se describe
mediante la siguiente función de posición angular:
𝜃(𝑡) = 𝐴𝑜𝑒−𝛾𝑡 cos(𝜔𝑑𝑡 − 𝜙)
Con
𝜔𝑑 = √𝜔2 − 𝛾
Para encontrar los valores de 𝐴𝑜 y de 𝜙 se debe evaluar la función en las condiciones iniciales:

17
UNIVERSIDAD TÉCNICA FEDERICO SANTA MARÍA
DEPARTAMENTO DE FÍSICA
Se tiene que
�̇�(0) = 0
𝜃(0) = 20º = 𝜋9⁄ [𝑟𝑎𝑑]
Entonces:
𝜋9⁄ [𝑟𝑎𝑑] = 𝐴𝑜𝑒−𝛾(𝑡=0) cos(𝜔𝑑(𝑡 = 0) − 𝜙)
0 = −𝐴𝑜𝛾𝑒−𝛾𝑡 cos(𝜔𝑑(𝑡 = 0) − 𝜙) − 𝐴𝑜𝜔𝑑𝑒−𝛾(𝑡=0)sin(𝜔𝑑 ⋅ (𝑡 = 0) − 𝜙)
Luego:
𝜋9⁄ [𝑟𝑎𝑑] = 𝐴𝑜 cos(−𝜙)
0 = 𝛾 cos(−𝜙) + 𝜔𝑑sin(−𝜙)
Entonces:
−𝛾 cos(−𝜙) = 𝜔𝑑sin(−𝜙) ⟹ tan(−𝜙) = −𝛾
𝜔𝑑
⟹ 𝜙 = −arctan (−𝛾
𝜔𝑑) = arctan (
𝛾
𝜔𝑑) = 0.75 [𝑟𝑎𝑑]
Reemplazando en la primera ecuación:
𝜋9⁄ [𝑟𝑎𝑑] = 𝐴𝑜 cos(−0.75 [𝑟𝑎𝑑] ) ⟹ 𝐴𝑜 =
𝜋9⁄ [𝑟𝑎𝑑]
cos(−0.75 [𝑟𝑎𝑑])= 0.477 [𝑟𝑎𝑑]
Entonces la función de posición angular es:
𝜃(𝑡) = 0.477 [𝑟𝑎𝑑]𝑒−6.75[𝑟𝑎𝑑 𝑠⁄ ]𝑡 cos(7.25[𝑟𝑎𝑑 𝑠⁄ ] ⋅ 𝑡 − 0.75[𝑟𝑎𝑑])
18
UNIVERSIDAD TÉCNICA FEDERICO SANTA MARÍA
DEPARTAMENTO DE FÍSICA
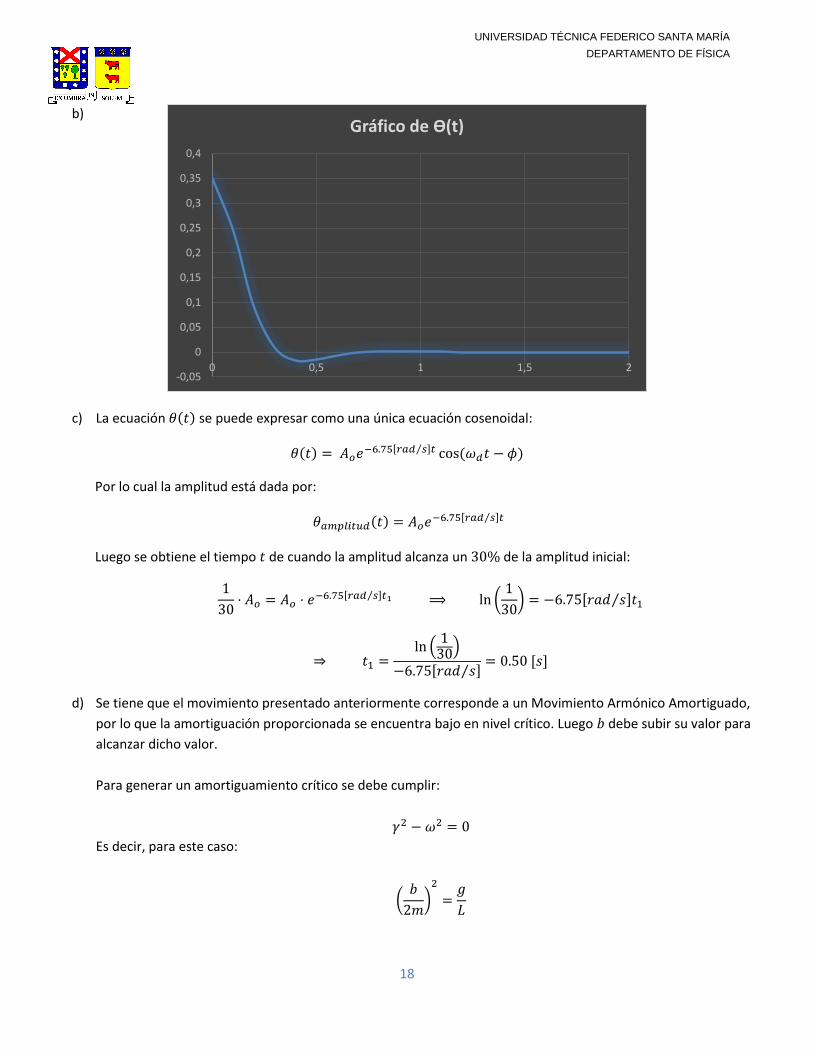
b)
c) La ecuación 𝜃(𝑡) se puede expresar como una única ecuación cosenoidal:
𝜃(𝑡) = 𝐴𝑜𝑒−6.75[𝑟𝑎𝑑 𝑠⁄ ]𝑡 cos(𝜔𝑑𝑡 − 𝜙)
Por lo cual la amplitud está dada por:
𝜃𝑎𝑚𝑝𝑙𝑖𝑡𝑢𝑑(𝑡) = 𝐴𝑜𝑒−6.75[𝑟𝑎𝑑 𝑠⁄ ]𝑡
Luego se obtiene el tiempo 𝑡 de cuando la amplitud alcanza un 30% de la amplitud inicial:
1
30⋅ 𝐴𝑜 = 𝐴𝑜 ⋅ 𝑒−6.75[𝑟𝑎𝑑 𝑠⁄ ]𝑡1 ⟹ ln (
1
30) = −6.75[𝑟𝑎𝑑 𝑠⁄ ]𝑡1
⇒ 𝑡1 =ln (
130)
−6.75[𝑟𝑎𝑑 𝑠⁄ ]= 0.50 [𝑠]
d) Se tiene que el movimiento presentado anteriormente corresponde a un Movimiento Armónico Amortiguado,
por lo que la amortiguación proporcionada se encuentra bajo en nivel crítico. Luego 𝑏 debe subir su valor para
alcanzar dicho valor.
Para generar un amortiguamiento crítico se debe cumplir:
𝛾2 − 𝜔2 = 0
Es decir, para este caso:
(𝑏
2𝑚)
2
=𝑔
𝐿
-0,05
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,4
0 0,5 1 1,5 2
Gráfico de Ө(t)
19
UNIVERSIDAD TÉCNICA FEDERICO SANTA MARÍA
DEPARTAMENTO DE FÍSICA
Ahora la masa aumenta al doble y la longitud disminuye a la mitad por lo que la ecuación anterior, ahora queda
expresada como:
(𝑏
4𝑚)
2
=2𝑔
𝐿
Entonces:
𝑏 = √32𝑚𝑔
𝐿= √
32 ⋅ 0.02[𝑘𝑔] ⋅ 9.81 [𝑚/𝑠2]
10 [𝑚]= 0.79 [(𝑁 ⋅ 𝑠)/𝑚]
20
UNIVERSIDAD TÉCNICA FEDERICO SANTA MARÍA
DEPARTAMENTO DE FÍSICA
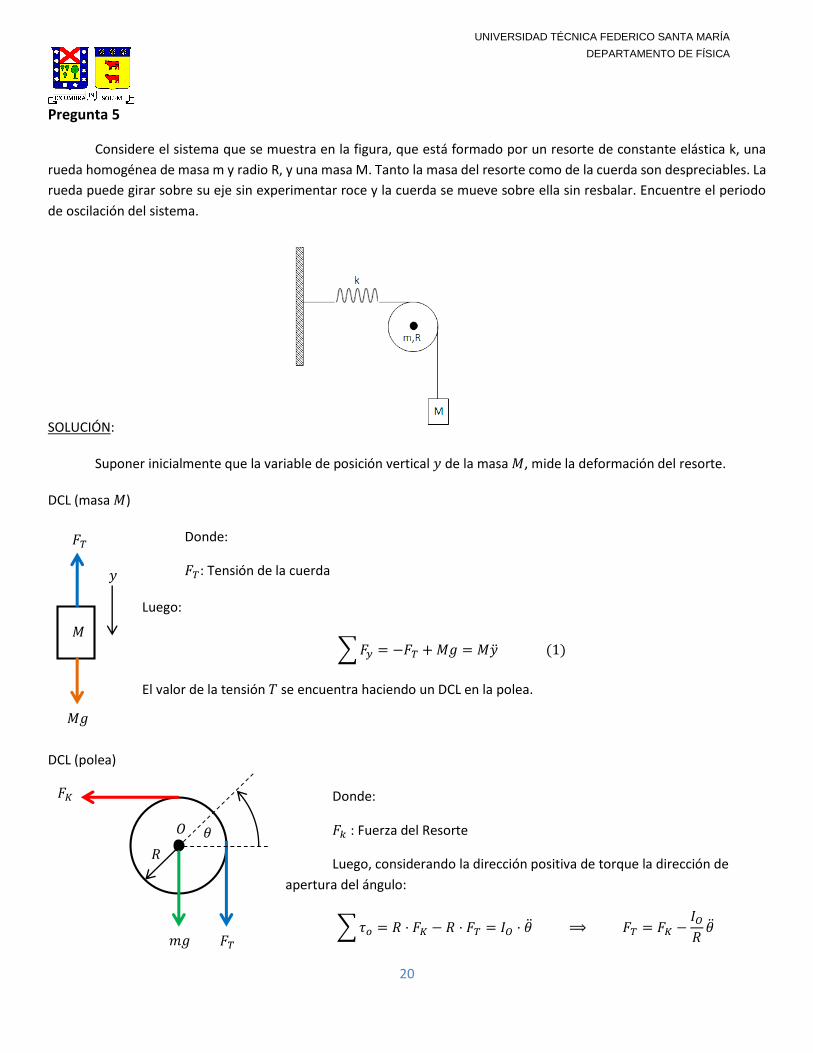
Pregunta 5
Considere el sistema que se muestra en la figura, que está formado por un resorte de constante elástica k, una
rueda homogénea de masa m y radio R, y una masa M. Tanto la masa del resorte como de la cuerda son despreciables. La
rueda puede girar sobre su eje sin experimentar roce y la cuerda se mueve sobre ella sin resbalar. Encuentre el periodo
de oscilación del sistema.
SOLUCIÓN:
Suponer inicialmente que la variable de posición vertical 𝑦 de la masa 𝑀, mide la deformación del resorte.
DCL (masa 𝑀)
Donde:
𝐹𝑇: Tensión de la cuerda
Luego:
∑ 𝐹𝑦 = −𝐹𝑇 + 𝑀𝑔 = 𝑀�̈� (1)
El valor de la tensión 𝑇 se encuentra haciendo un DCL en la polea.
DCL (polea)
Donde:
𝐹𝑘 : Fuerza del Resorte
Luego, considerando la dirección positiva de torque la dirección de
apertura del ángulo:
∑ 𝜏𝑜 = 𝑅 ⋅ 𝐹𝐾 − 𝑅 ⋅ 𝐹𝑇 = 𝐼𝑂 ⋅ �̈� ⟹ 𝐹𝑇 = 𝐹𝐾 −𝐼𝑂
𝑅�̈�
𝐹𝐾
𝑚𝑔 𝐹𝑇
𝑂 𝜃
𝑅
𝐹𝑇
𝑀𝑔
𝑀
𝑦

21
UNIVERSIDAD TÉCNICA FEDERICO SANTA MARÍA
DEPARTAMENTO DE FÍSICA
Pero:
𝜃 = −𝑦
𝑅 ⟹ �̈� = −
�̈�
𝑅
METODO 1: Despejando en función de la posición lineal (𝑦)del bloque de masa 𝑀
Reemplazando �̈� en la ecuación encontrada para 𝐹𝑇:
𝐹𝑇 = 𝐹𝐾 +𝐼𝑂
𝑅2�̈�
Reemplazando 𝑇 en la ecuación (1):
− (𝐹𝐾 +𝐼𝑂
𝑅2�̈�) + 𝑀𝑔 = 𝑀�̈� ⟹ −𝑘𝑦 + 𝑀𝑔 = (
𝐼𝑂
𝑅2+ 𝑀) �̈�
Entonces la ecuación diferencial del movimiento queda:
�̈� + 𝑘
(𝐼𝑂
𝑅2 + 𝑀)𝑦 =
𝑀𝑔
(𝐼𝑂
𝑅2 + 𝑀)
Se observa en la ecuación que el movimiento que describe la masa 𝑀 es Armónico Simple, de la cual se tiene que el
cuadrado de la frecuencia angular (𝜔2), es:
𝜔2 =𝑘
(𝐼𝑂
𝑅2 + 𝑀) ⟹ 𝜔 = √
𝑘
(𝐼𝑂
𝑅2 + 𝑀)
Y se tiene que 𝜔 =2𝜋
𝑇, entonces se tiene que el periodo es:
𝑇 = 2𝜋√(
𝐼𝑂
𝑅2 + 𝑀)
𝑘= √
12 𝑚 + 𝑀
𝑘
𝑇 = 2𝜋√𝑚 + 2𝑀
2𝑘
MÉTODO 2: Despejando en función de la posición angular 𝜃 de la polea.
De la identidad anterior:
𝑦 = −𝜃𝑅 ⟹ �̈� = −�̈�𝑅

22
UNIVERSIDAD TÉCNICA FEDERICO SANTA MARÍA
DEPARTAMENTO DE FÍSICA
Entonces reemplazando 𝐹𝑇 e 𝑦 en la ecuación (1):
− (𝐹𝐾 −𝐼𝑂
𝑅�̈�) + 𝑀𝑔 = −𝑀�̈�𝑅 ⟹ − (−𝑘𝑅𝜃 −
𝐼𝑂
𝑅�̈�) + 𝑀𝑔 = −𝑀�̈�𝑅 ∶ 𝑅⁄
𝑘𝜃 + (𝐼𝑂
𝑅2+ 𝑀) �̈� = −
𝑀𝑔
𝑅
Por lo tanto la ecuación diferencial del movimiento es:
�̈� +𝑘
(𝐼𝑂
𝑅2 + 𝑀)𝜃 = −
𝑀𝑔
𝑅 (𝐼𝑂
𝑅2 + 𝑀)
Se observa en la ecuación que el movimiento que describe la masa 𝑀 es Armónico Simple, de la cual se tiene que el
cuadrado de la frecuencia angular (𝜔2), es:
𝜔2 =𝑘
(𝐼𝑂
𝑅2 + 𝑀) ⟹ 𝜔 = √
𝑘
(𝐼𝑂
𝑅2 + 𝑀)
Y se tiene que 𝜔 =2𝜋
𝑇, entonces se tiene que el periodo es:
𝑇 = 2𝜋√(
𝐼𝑂
𝑅2 + 𝑀)
𝑘= √
12
𝑚 + 𝑀
𝑘
𝑇 = 2𝜋√𝑚 + 2𝑀
2𝑘