-
BAB I PENDAHULUAN
1.1 Latar Belakang
ATV atau All-Terrain Vehicle merupakan kendaraan multiguna yang
dapat beroperasi di segala medan. Tren desain ATV sekarang ini
mengacu pada rancangan kendaraan bermotor yang memiliki roda empat
(seperti yang ditunjukkan oleh Gambar 1.1)
Gambar 1.1 Tren rancangan ATV Karena selalu dioperasikan pada
medan yang bervariasi, ATV dirancang
memiliki kemampuan manuver yang didukung dengan konstruksi
rangka yang ringan dan kuat, mesin yang tangguh, dan sistem
suspensi yang memadai. Hampir serupa dengan mobil, ATV telah
menerapkan Aeckermanns steering dan independent suspension. Dari
sisi penggerak roda, ATV memiliki dua jenis, yaitu jenis penggerak
roda dua (2WD) dan penggerak roda empat (4WD). Kedua jenis
-
tersebut tetap berbasis motor dan letak perbedaannya hanya pada
sistem transmisi roda. Oleh karena itu ATV dapat dibuat dari motor
roda dua yang tersedia di pasaran.
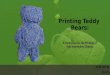
Perancangan ATV dengan menggunakan basis motor pernah dilakukan
oleh Jimmy D.N. (2005) yang menggunakan mesin Kawasaki Z200, dengan
nama ATV Z200, seperti yang ditunjukkan oleh Gambar 1.2.
Gambar 1.2 ATV Z200 (Jimmy D.N., tahun 2006)
Sistem transmisi roda belakang menggunakan sistem rantai. Sistem
suspensi depan menggunakan sunspensi independen dan belakang
menggunakan sistem monoshock. Tujuan penggunaan sistem suspensi ini
adalah agar jarak ayun (travel) roda lebih besar dan agar ATV lebih
mudah melewati medan yang rusak.
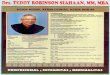
Rancangan suspensi belakang merupakan mekanisme yang melibatkan
sebuah lengan ayun yang terbuat dari pipa dan beberapa batang
penghubung (multi-link system). Contoh suspensi belakang
ditunjukkan oleh Gambar 1.3.
-
Gambar 1.3 Sistem suspensi belakang sebuah ATV Suspensi ini
melibatkan mekanisme dasar, yaitu mekanisme empat batang
atau four-bar linkages. Mekanisme ini cukup sederhana tapi dapat
menyebabkan roda belakang ATV dapat berayun dengan jarak langkah
tertentu. Mekanisme
-
sederhana ini terdiri dari empat batang penghubung dimana tiga
batang dapat bergerak relatif satu sama lain dan satu batang tetap
(fixed) yang biasanya merupakan chasis tempat sambungan ketiga
batang penghubung lainnya.
Tugas akhir ini akan menyelidiki karakter gerak mekanisme
suspensi roda belakang yang terdapat pada rancangan ATV Z200.
1.2 Tujuan Penulisan
Penelitian ini dilakukan untuk mencari karakter gerak mekanisme
suspensi roda belakang ATV Z200. Karakter gerak sebuah mekanisme
meliputi posisi, kecepatan dan percepatan linier dari batang-batang
penghubung.
Selain itu, hasil analisis kinematika ini dapat digunakan
sebagai fundamental yang diperlukan untuk melakukan analisis
dinamik guna mencari gaya-gaya dinamik yang timbul ketika mekanisme
dioperasikan.
1.3 Perumusan Masalah
Masalah yang akan dibahas dalam penelitian ini mengenai 1.
Penentuan posisi untuk setiap waktu dari beberapa titik sambungan
(joint)
antara batang penghubung pada mekanisme supensi roda belakang.
2. Penentuan harga kecepatan linier untuk setiap waktu dari
beberapa titik
sambungan (joint) antara batang penghubung pada mekanisme
supensi independen belakang.
3. Penentuan harga percepatan linier untuk setiap waktu dari
beberapa titik sambungan (joint) antara batang penghubung pada
mekanisme supensi independen belakang.
-
4. Penentuan jarak langkah (travel) roda dan kondisi Grashof.
Adapun asumsi dan pembatasan yang digunakan selama penelitian
adalah
1. Batang penghubung yang dianalisis bersifat kaku dan massa
diabaikan. 2. Analisis yang dilakukan adalah analisis kinematika
saja yang meliputi
analisis posisi, kecepatan dan percepatan linier titik-titik
sambungan antar batang penghubung.
3. Mekanisme suspensi roda belakang ATV ini disederhanakan
menjadi mekanisme bidang yang terletak pada bidang y-z (bidang
kartesius) dengan satu derajat kebebasan. Gerak dalam arah x
diabaikan.
4. Hasil analisis berupa grafik fungsi waktu dari posisi,
kecepatan, dan percepatan. Grafik kecepatan dan percepatan linier
hanya menunjukkan komponen pada arah y dan z. Karena kecepatan dan
percepatan linier merupakan fungsi waktu, grafik ditampilkan dalam
bentuk harga kecepatan dan percepatan linier versus (sumbu
vertikal) dan waktu dalam detik (sumbu horisontal).
5. Gerak mekanisme yang dianalisis adalah gerak ayun ke atas dan
ke bawah. 1.4 Metodologi Penelitian
Penelitian dilakukan secara bertahap, yaitu dengan 1. Memodelkan
mekanisme suspensi roda belakang ATV Z200 (hasil
penelitian sebelumnya) dengan bantuan perangkat lunak CAD 3
dimensi, yaitu SolidWorks. Beberapa komponen pendukung atau
aksesoris dalam mekanisme yang tidak terlibat dalam analisis
kinematika dihilangkan, seperti sistem rem, shock absorber,
bushing, bantalan, dll.
-
2. Melakukan analisis kinematika dimulai dengan mensimulasikan
input gerak sebagai fungsi harmonik terhadap waktu. Analisis
dibantu oleh perangkat lunak analisis gerak, yaitu
MSC.visualNastran 4D. Tujuan tahap penelitian ini adalah untuk
mencari karakteristik gerak tiap batang penghubung akibat gerak
input tersebut.
3. Melakukan pembahasan untuk dari hasil analisis pada poin 2
untuk memperoleh kesimpulan mengenai karakter gerak mekanisme
rancangan yang lama.
1.5 Sistematika Penulisan
Penulisan tugas akhir ini dimulai dengan Bab I yang menceritakan
latar belakang umum dan khusus penulisan, tujuan penulisan dan
penelitian, masalah-masalah yang akan diselesaikan, metodologi
(tahap) penelitian, sistematika penulisan.
Bab II membahas tentang dasar-dasar teori yang digunakan,
seperti terminologi mekanisme, fundamental kinematika (dasar-dasar
mencari kecepatan dan percepatan), dan mekanisme empat batang
(four-bar linkages).
Bab III membahas tahapan penelitian sesuai dengan metodologi,
seperti pemodelan mekanisme, persiapan penelitian dan penyajian
detail konstruksi batang penghubung model (gambar teknik), dll.
Selanjutnya, analisis kinematika dijelaskan di dalam Bab IV.
Analisis dilakukan sesuai dengan sistematika dalam metodologi
penelitian. Setiap hasil analisis dibahas dan disimpulkan di dalam
bab ini.
-
Sebagai penutup, Bab V merupakan intisari dari hasil penelitian
yang dilakukan, sekaligus menampilkan beberapa kesimpulan dari
penyelesaian masalah-masalah yang diteliti.