Embed Size (px)
DESCRIPTION
BigDog. by Shevah Marants & Yizhak Elboher. מוטיבציה. יותר מחצי משטחו היבשתי של כדוה"א אינו עביר לכלי רכב קונבנציונאליים, ובכל זאת נגיש לבעלי חיים הולכי רגל. מצב זה יוצר מוטיבציה לפיתוחם של רובוטים שיוכלו לנוע גם בתנאי שטח קשים ע"י אימוץ פתרון התנועה של הטבע – הרגליים. - PowerPoint PPT Presentation
Citation preview
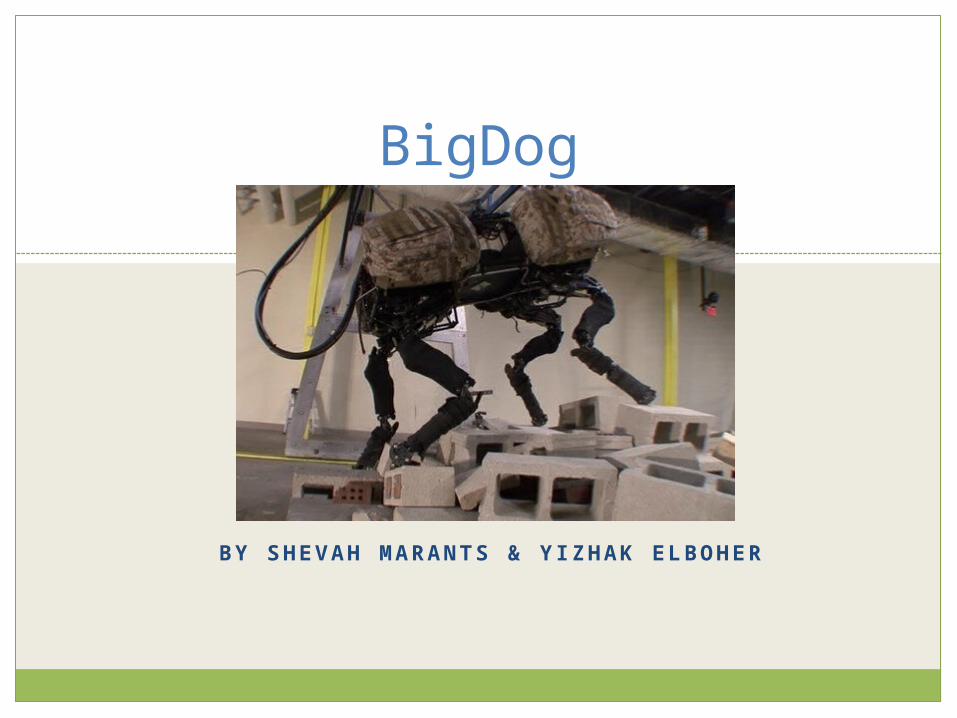
BY SHEVAH MARANTS & YIZHAK ELBOHER
BigDog
מוטיבציה
יותר מחצי משטחו היבשתי של כדוה"א אינו עביר לכלירכב קונבנציונאליים, ובכל זאת נגיש לבעלי חיים הולכי
רגל. מצב זה יוצר מוטיבציה לפיתוחם של רובוטים שיוכלו
לנוע גם בתנאי שטח קשים ע"י אימוץ פתרון התנועה של הטבע – הרגליים.
המטרה היא לפתח רובוט המחקה את תנועתם של בעליהחיים, ובעזרת רגליו מסוגל לנוע על משטחים אשר
אינם עבירים לכלי רכב.
רקע
-השנים האחרונות עובדים מדענים ומהנדסים על 40ב פיתוחים רובוטיים בתחום התנועה הרגלית, ופיתחו
מגוון רובוטים בעלי רגליים. דוגמאות לרובוטים ממעבדות הCMU Leg Laboratory
:MIT LegLab ו- רובוט רגל אחת המסוגל לייצב את עצמו.1.
רגליים המסוגלים לעלות במדרגות.2רובוטים בעלי 2.
21 רגלים המסוגלים לרוץ במהירות של בכ- 4רובוטים בעלי 3.קמ"ש.
.חסרונות
על הפרוייקט
BigDog 2005 רגליים, שפותח בשנת 4 הוא רובוט בעל ומספר מוסדות טכנולוגיים Boston Dynamicsע"י
.DARPAנוספים, במימון מטרה: נשיאת ציוד ואספקה לחיילים בתנאי שטח
וסביבה שבהם לא ניתן לשנע אוכל בעזרת כלי רכב.:רובוט אידיאלי
נע בכל מקום שבו אדם יכול ללכתפועל במשך זמן רבנושא את הדלק והציוד של עצמואוטונומי בתנועה
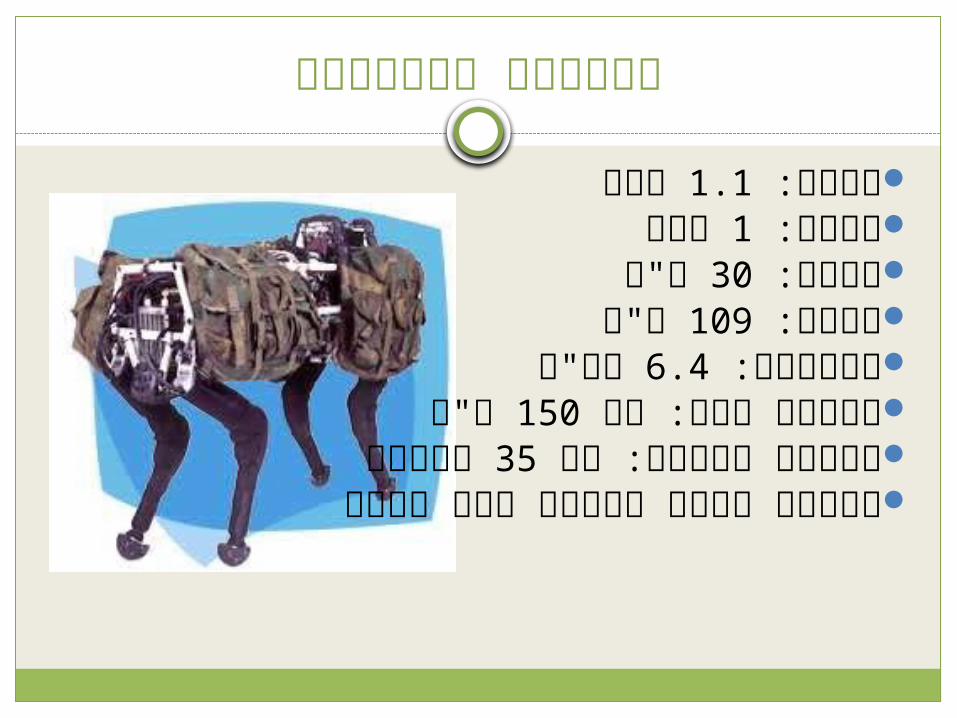
נתונים ויכולות
:מטר1.1אורך :מטר1גובה :ס"מ30רוחב :ק"ג109משקל :קמ"ש6.4מהירות ק"ג150נשיאת משא: עד מעלות35זווית עלייה: עד מסוגל לנוע בתנאי שטח קשים
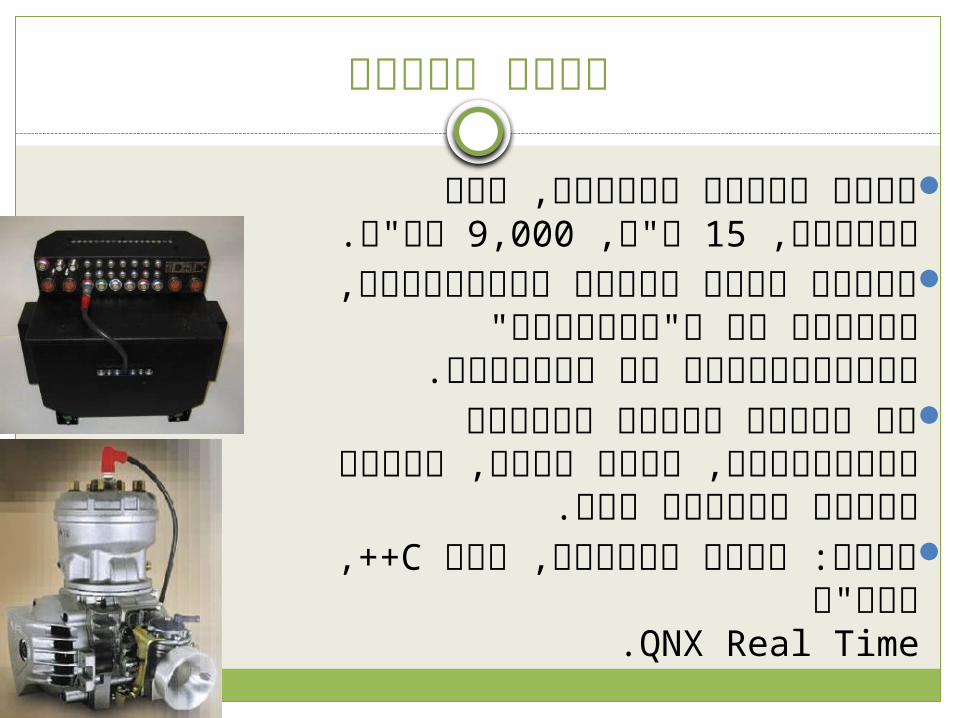
מנוע ומחשב
,15מנוע בעירה פנימית, שתי פעימות סל"ד.9,000כ"ס,
המנוע מניע משאבה הידראולית, שמניעהאת ה"מפעילים" ההידראוליים של
הרגליים. ,כל מפעיל מורכב מבוכנה הידראולית
רכיב בקרה, חיישן מיקום וחיישן כוח. מחשב: מעבד פנטיום, קודC ,++
מעה"פQNX Real Time.
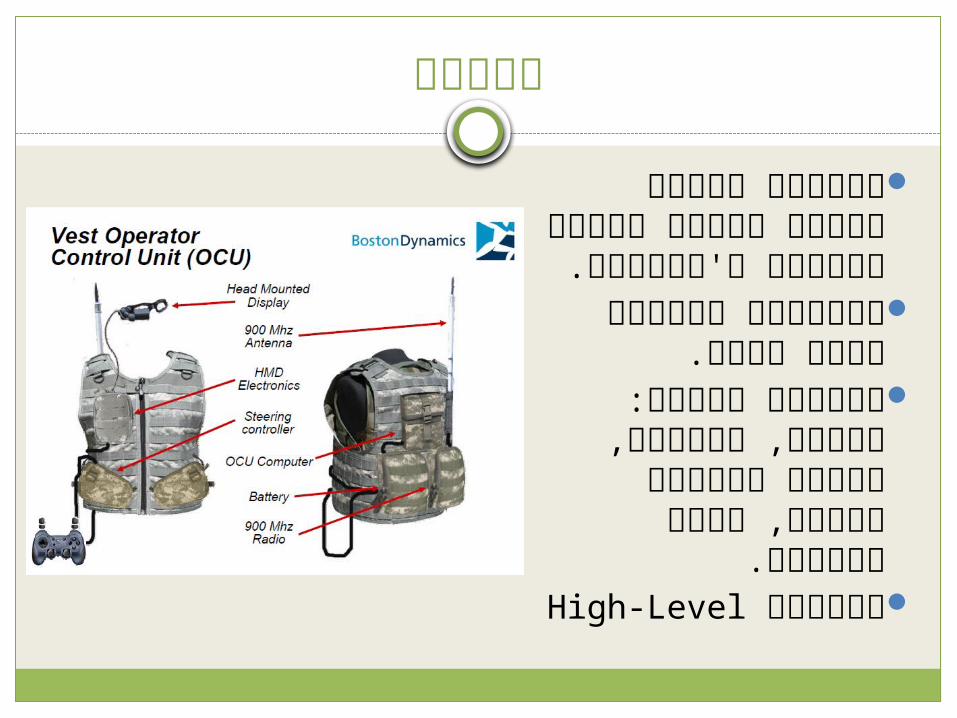
שליטה
הרובוט מופעל בעזרתיחידת שליטה בתצורת
ג'ויסטיק. הפקודות נשלחות בגלי
רדיו. ,פקודות שונות: כיוון
מהירות, הדלקת וכיבוי המנוע, קימה וישיבה.
פקודותHigh-Level
סרטון
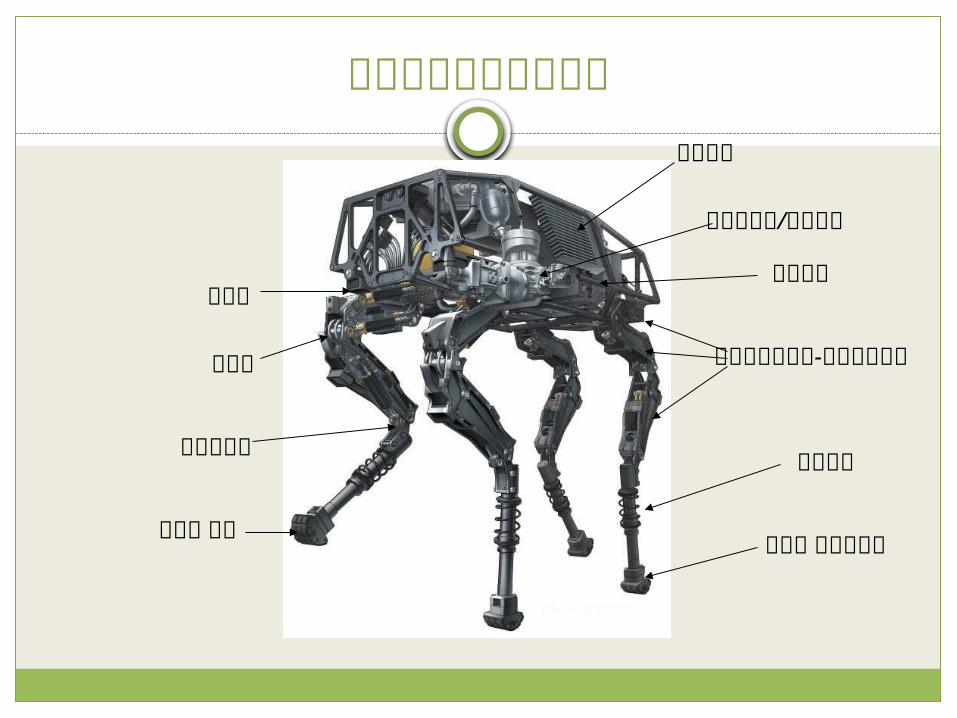
ארכיטקטורה
ברך
ירך
קרסול
מחשב
מנוע/משאבה
מצנן
מנועים-מפעילים
קפיץ
חיישן כוחכף רגל
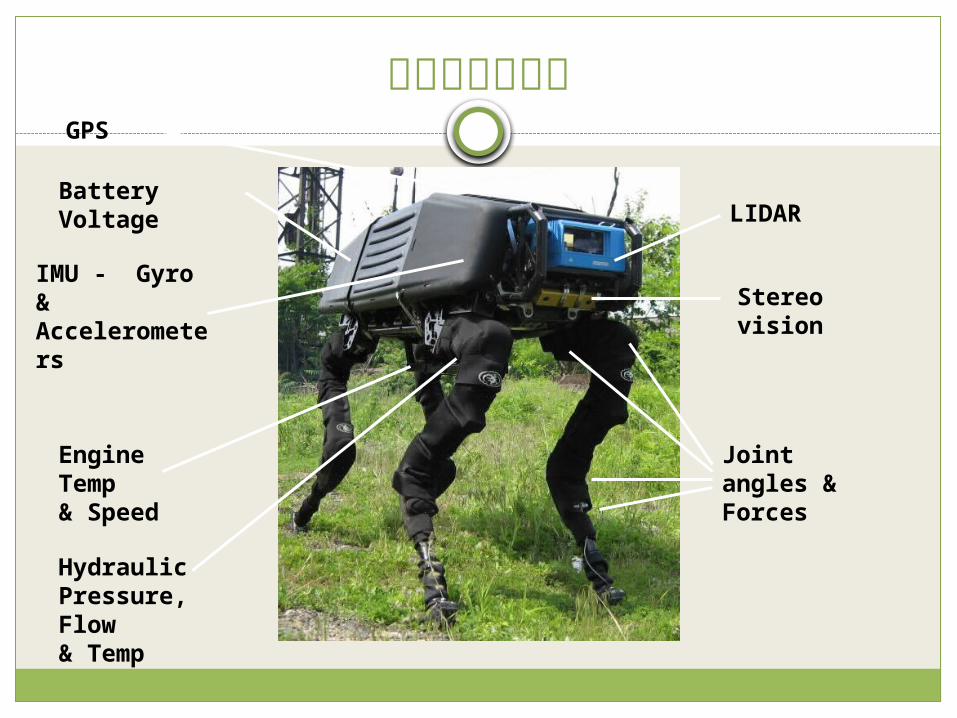
חיישניםGPS
Joint angles & Forces
IMU - Gyro & Accelerometers
Battery Voltage
Stereo vision
LIDAR
Engine Temp& Speed
HydraulicPressure, Flow& Temp
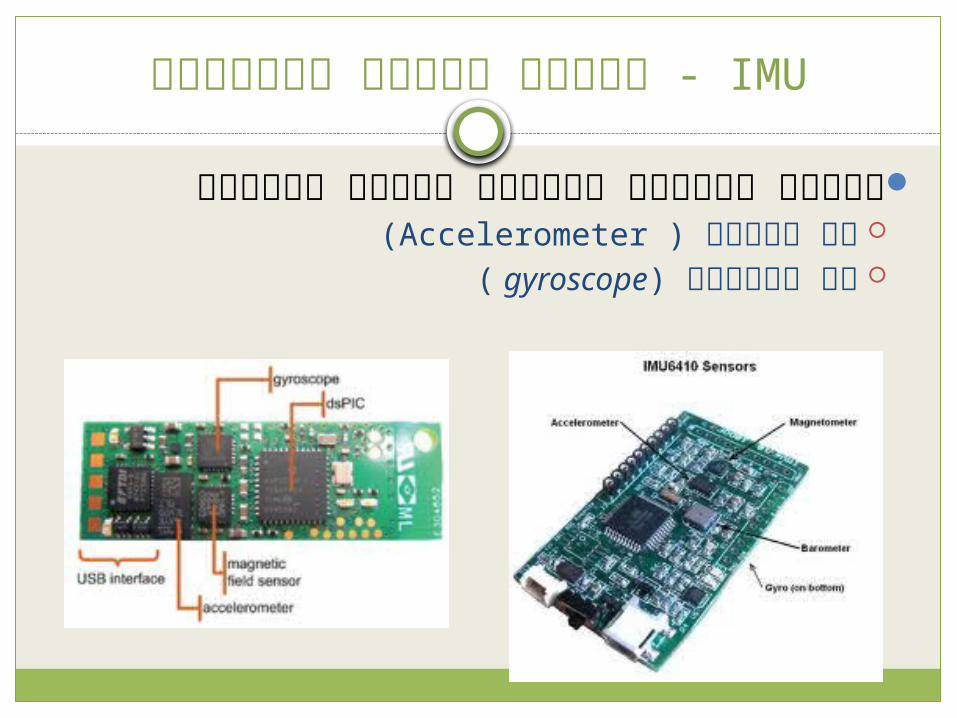
IMUיחידת מדידת אינרציה -
משמשת לייצוב הרובוט במהלך פעולתו ( מד תאוצהAccelerometer)( מד יציבותgyroscope )
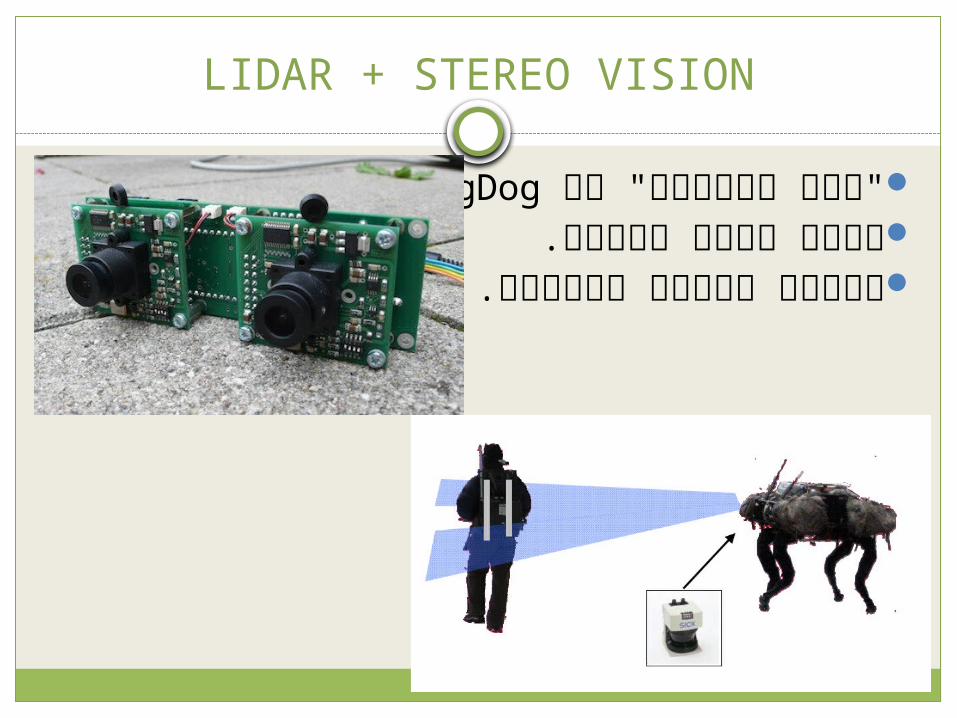
LIDAR + STEREO VISION
חוש הראייה" של"BigDog..מעקב אחרי החייל.זיהוי עצמים מלפנים
עם הפנים קדימה
.)התמודדות עם תנאי שטח קשים יותר )פחות נפילות.יותר מהיר.פחות רועש.אורך פעילות גבוה יותר.)אוטונומי יותר )ראייה ממוחשבת ותכנון תנועה.פיקוד בדיבור.)הוספת פונקציונליות )יד מעבר מבחן השימושיות שלDARPA לפני מסירתו
לשטח.
שאלות?
מקורות מידע
BigDog, the Rough-Terrain Quaduped Robot - Marc Raibert, Kevin Blankespoor, Gabriel Nelson, Rob Playter and the BigDog Team
BigDog Overview – Boston Dynamicshttps://en.wikipedia.org/wiki/BigDoghttp://www.robaid.com/robotics/bigdog-%E2
%80%93-a-rough-terrain-robot.htmhttp://www.army-technology.com/features/fea
turecould-bigdog-be-a-soldiers-best-robotic-friend





























