-
7/21/2019 Bir Sarka Sisteminde Video Geri Beslemesi Ile Gerek
Zamanl Denetim
1/6
Bir Sarka Sisteminde Video Geri Beslemesi ile Gerek Zamanl
Denetim
Aydn Eresen1, Nevrez mamolu1, Mehmet nder Efe1
1Elektrik ve Elektronik Mhendislii BlmTOBB Ekonomi ve Teknoloji
niversitesi, Ankara
{aeresen,nimamoglu,onderefe}@etu.edu.tr
zete
Otomatik kontrol sistemlerinin nemli uygulamaalanlarndan biri
grsel bilginin deerlendirilmesi ve bubilginin kontrol hedeflerinin
gerekletirilmesindekullanlmasdr. Bu bildiride bir sarka sistemi
kullanlaraksistemin tek eksende frasz motor ve pervane itkisi
ile
hareketi salanm, sarka ubuu zerine sabitlenen bir minikamera
vastas ile dnme eksenine dik dzlemde bulunan bircismin video
zerinde nceden tanmlanm bir blgeyeyerlemesi problemi ele alnmtr.
Sistemin alt dzey kontrolbir kontrol kolu 1 zerinden elle yaplm,
ardndan integralkontrolr ve bulank mantk kontrolr denenmitir.
Eldeedilen bulgulara gre bulank mantk kontrolrnn baarmmspet
bulunmutur.
1. Giri
Sarka sistemleri birok bilimsel esere konu olmu,
literatrdezellikle ters sarka zerine oka bulgular
sunulmutur[1-3].Bunlar arasnda Kremayer dilisi zerinde hareket
eden, dnel
biimde olan veya kayl olan sarka sistemleri okakarlalan deneysel
tiplerdir. Bu alma, znde video geribeslemesinin kullanmn amalad iin
alt dzey kontrolproblemi olarak standart sarka sistemi zerinde
durulmutur.ekil 1de bahsi geen bir sarka sisteminin temsili
resmi,ekil 2de de gereklenen sistemin fotograflar
verilmitir.Sistemin dinamik modelinin (1) denklemindeki gibi
olduuEuler tretimi ile bulunabilir.
)()sin( fbua (1)
Her ne kadar sistemin dinamik modeli zerinden kontrolilevini
gerekletirmek mmknsede bu almann neticeleridinamik model zerinden
kurgulanmam, hareketi niteleyen
dilsel deikenler zerinde durularak sistem olabildiincegrsel
algya dayal hale getirilmeye allmtr. Buyaklamn benimsenmesinin
temel nedeni burada almakoullar belirlenen sistem bileenlerinin
fevkalade karmakdiferansiyel gsterilime sahip bir insansz hava
aracndakullanlmasnn amalanmasdr. Burada kullanlan dzenektekontrol,
dzenein ucunda bulunan frasz motor ve pervaneile salanmaktadr.
Pervaneden alnan itki ile sistem istenenkonuma getirilebilir ve bu
noktada tutulabilir.
Gerek zamanda videonun edinimi iin sarkacn stnebir mikro kamera
monte edilmitir. Alnan grnt bilgisayarortamnda ilenerek cismin
bulunduu nokta belirlenmekte vecismi video grntsnde merkeze
alabilmek iin gereklikontrol sinyali retilmektedir. Makalenin
sunumu u
ekildedir: 2. blmde sistemin bileenleri, 3. blmde sarka
1ng.Joystick
sisteminin elle kontrol, 4. blmde grnt tabanlkontroldekullanlan
grnt ileme metodlar, 5. blmde kullanlankontrol teknikleri, 6. blmde
ise gerek zamanl deneyselsonular sunulmutur.
ekil 1.Sarka sisteminin temsili izimi
ekil 2Deney Dzenei
2. Sistemin Bileenleri
Dzenekte, AXI 2212/34 frasz motoru kullanlmtr. Bu trmotorlar
hafif model uaklarda yksek tork zelliklerinedeniyle tercih
edilmektedir. Motorun rotoruna 104.7llerinde bir pervane monte
edilerek itki mekanizmastamamlanmtr. Kullanlan motor JETI
elektronik hzkontrolr (EHK) ile srlmektedir. ekil 3de
sisteminbileenleri gsterilmitir.
ekil 3 - Sisteminbileenleri
Kullanlan motorun kontrolkabul edilebilir aralekil4te gsterilen
DGM 2sinyali vastasyla salanmaktadr. Bu
2ng.Pulse Width Modulation (PWM)
616
Otomatik Kontrol Ulusal Toplants,
13-15 Kasm 2008, TOK'08, Istanbul
mailto:onderefe%[email protected]:onderefe%[email protected]
-
7/21/2019 Bir Sarka Sisteminde Video Geri Beslemesi Ile Gerek
Zamanl Denetim
2/6
sinyali retmek ve sisteme ilikin bilgilerin kontrolbilgisayarnda
grntlenebilmesi iin DSpace kontrol kartve Control Desk yazlm
kullanlmaktadr. Kart kendizerinde ilemci bulundurmaktadr ve
bilgisayar ortamndakurgulanan kontrolrlerin uygulanmasn
mmknklmaktadr. Bu almada DSpace birimi motoru sren DGMsinyalinin
retilmesi ve veri okumak iin kullanlmtr.
ekil 4 - DGM Sinyali
ekil 4te gsterilen periyodun, 1ms ve 2ms aralnatekabl eden %5i
ile %10u DGM sinyalinin kabul edileb ilir
araldr. Motora giden DGM deeri de bu oranlarla
ifadeedilmektedir. 0.05 deeri %0 g anlamna gelmektedir, 0.1deeri
ise %100 gc salamaktadr. Uygulamamzda 0.05-0.1aral, snrlar 0 ve 255
olan 256 eit paraya blnerekkullanlmtr.
DGM sinyalinin (Bkz. ekil 4) kabul edilebilir aral 0.05ile 0.1
olarak belirtilmiti. ekil 8de ve ekil 11dekigrafiklerde gsterilen
DGM sinyali ekillerde de belirtildiigibi 0-255 aralnda tam
saylardr. Bu deerler motorusrmek iin 0.05-0.1 aralna
evirilmektedir.
Motor sisteminin enerjisi lityum-polimer tipte pillerlesalanmtr.
Test dzeneinde lityum-polimer bataryanntercih edilme nedeni ise
kullanlan motorun yksek akmihtiyacn ok fazla gerilim dmne
uramadan
salayabilmesidir.
3. Sarka Sisteminin Elle Kontrol
Sarkacn el ile kontroln salamak iinekil 3te gsterilenLogitech
Force 3D Pro isimli kontrol kolu kullanlmtr. Budonanm 3 yn ekseni,
hzlanmay salayan bir eksen ve 12tua sahiptir. Kontrol kolundaki 2
tu yardmyla el ile kontolve grnt tabanl otonom kontrol arasnda gei
salanmtr.El ile kontrolde motora verilecek gc belirlemek iin
kontrolkolu zerindeki hzlanma ekseni kullanlmtr. El ile
kontrolusalamak iin kontrol kolu nce bilgisayara balanmtr,kontrol
kolundan bilgisayara alnan veriler ise seri haberlemekullanlarak
Dspacekartna gnderilmitir.
Kontrol kolu verilerinin bilgisayara okunmas ve DSpacekartna
seri balant kurulmas iin gerekli yazlm MicrosoftVisual Studio.Net
2008de C# dili kullanlarakoluturulmutur. Hz ekseninden alnan deer
DSpace kartndailenerek ilgili DGM sinyaline dntrlm,
byleliklemotorun istenen ada tutulmas salanmtr. Bu
ilemlerMatlab/Simulink kullanlarak modellenmi ve sonrasndaDSpace
kartna gmlerek altrlmtr.
4. Grnt leme Yntemleri
Grnt ileme birok fakl renk uzaynda gerek-letirilebilmektedir.
Grnt ilemede en yaygn olan renk
uzay RGBdir1. RGB renk uzaynda ortamda bulunan renklerkrmz, yeil
ve maviden oluan temel rengin farkloranlarda kartrlmasyla
olumaktadr [4]. RGB renk uzaykullanldnda, ortamdaki k younluu ve
ktaki deiimgrntdeki bilginin karsanmasnda glklere sebepolmaktadr.
RGB renk uzayndan farkl olarak kullanlan dierrenk uzaylarndan
birisi deHSV2dir [4]. HSV renk uzaynda
ortamda bulunan renkler, RGB renk uzayndan farkl olarakrenk
z,doygunluk veparlaklkolarak tanmlanmaktadr. Busebepten dolay HSV
renk uzaynda k deiimleri kolaylklatannabilmekte ve grnt ileme
srasndaki zorluklar ortadankaldrlabilmektedir.
Kullanlan test dzeneinde arka plan beyaz olarak kabuledilmi ve
farkl k younluklarnda denemeler yaplmtr;sonu olarak HSV renk uzay
kullanm uygun grlmtr.Mikro kameradan alnan grnt HSV renk uzayna
evirilmive evirilen grnt HSVnin nc renk boyutu olanparlaklk
kullanlmadan elde edilen grnt grilik leineevirilmitir. ekil 5te RGB
grnts, RGBden HSVformatna dntrlen grntnn RGB uzayndakigrnm ve
yaplan uygulamada kullanlan renk uzay
gsteriminin iki bileeni verilmitir.
ekil 5(a) RGB uzaynda temsil, (b) HSV deerlerinin RGBuzaynda dnm
yaplmadan yorumlanmas, (c) HSVninrenk z (H) paras, ve (d) HSVnin
doygunluk (S) paras
Grilik leine evrilen grntnn en-boy deerleri,Gauss piramidi
ynteminin alt rnekleme zelliikullanlarakazaltlmtr [4-5]. Piramidin
alak geiren szge zelliisayesinde de grnt iyiletirilmitir. Sistemden
elde edilenrnek bir grntnn ilem ncesindeki ve sonrasndakisonular
ekil 6da gsterilmektedir. Gauss piramidiileminin sonucunda elde
edilen grntdeki nesnenin dahaiyi tanmlanabilmesi iin grnt ard arda
2 medyan szgetengeirilmitir [4]. Bu ilemin sonunda elde edilmi
olangrnt, grltlerden arndrlmve boyutu kltlmtr.Uygulanan Gauss
Pramidi ile grntdeki nesnenin daha iyitanmlanmas salanmtr.
Medyan filtrelerden geirilen grnt k ve grltetkilerinden dolay
iyi bir analiz grnts deildir. Bugrntdeki nesnenin zelliklerini net
olarak elde etmek iingrnt siyah beyaz grntye evirilirken Yerel Eik
Deer(YED) yntemi kullanlmtr[4,6-8]. YED yntemi sayesinde
1ng.Red-Green-Blue2ng.Hue, Saturation, Value
(a) (b)
(c) (d)
617
http://tr.wikipedia.org/w/index.php?title=Renk_%C3%B6z%C3%BC&action=edit&redlink=1http://tr.wikipedia.org/w/index.php?title=Doygunluk&action=edit&redlink=1http://tr.wikipedia.org/w/index.php?title=Parlakl%C4%B1k&action=edit&redlink=1http://tr.wikipedia.org/w/index.php?title=Parlakl%C4%B1k&action=edit&redlink=1http://tr.wikipedia.org/w/index.php?title=Parlakl%C4%B1k&action=edit&redlink=1http://tr.wikipedia.org/w/index.php?title=Parlakl%C4%B1k&action=edit&redlink=1http://tr.wikipedia.org/w/index.php?title=Doygunluk&action=edit&redlink=1http://tr.wikipedia.org/w/index.php?title=Renk_%C3%B6z%C3%BC&action=edit&redlink=1
-
7/21/2019 Bir Sarka Sisteminde Video Geri Beslemesi Ile Gerek
Zamanl Denetim
3/6
k etkileri sonucu oluan nesne gibi alglanabilecek blgeler(Bkz.
ekil 7(b)) arka plan olarak tanmlanr. Yerel eik deerynteminin
temelinde, grntnn farkl k younklarnasahip blgelerinde farkl eik
deerleri kullanlarak iki deerligrntye dntrlmesi vardr. Iktaki
dzensizliinbertarafna bir rnek ekil 7de gsterilmitir. Elde
edilennesnenin arlk merkezi belirlenmi ve grnt zerinde bu
nokta iaretlenmitir(Bkz. ekil 7(a)).
ekil 6 - Gauss Piramit (a)HSVden gri tona evirilmi resim(b)Gauss
Piramidi sonucu oluan grnt (c)Medyan szgesonucu oluan grnt
5. Kontrol Teknikleri
Grnt analizi sonucunda elde edilen k deeri blm 4tebelirtildii
gibi cismin arlk merkezini vermektedir.Uygulamas yaplan grnt tabanl
kontrol almasndakamera grnts zerinde belirlenen arlk
merkezikoordinatlar cismin grnt zerinde istenen bir
noktayagetirilmesi iin bilinmesi gereken geri besleme
bilgisidir.Kapal evrimde integral kontrolr ve bulank mantkkontrolr
test edilmitir ve bu yntemlerin gerek zamandauygulanmasnda sistemin
dinamik modelinden istifadeedilmemitir.
Gereklenen her iki yaklamda da kapal evrim kontrol
sisteminin amac, cismin grntde x ekseninde orta noktayagelmesini
salamaktr. Bunun nedeni ise sarka sisteminin 1hareket serbestisine
sahip olmasndan dolay sabit durancismin grnt zerinde bir yay
zerinde hareket etmekzorunda olmasdr. Bir hareket serbestisi ile
iki eksendeyerleim salanamayacandan dolay tek
eksendeyerletirmeproblemi ele alnm ve eksen znrlnn daha
yksekolmasndan dolay -yatay eksen olan- x ekseninde merkezealma
ilemi amalanmtr. Grnt tabanl kontrol ilemleriuygulanan iki kontrol
tr iin de saniyede yaklak olarak 7grnt ile rneklenmitir.
5.1. ntegral Kontrolr
Sarka sistemi ikinci dereceden bir sistemdir veliteratrde bu tip
sarka sistemlerinin geri beslemelikontrolnde Oransal ntegral
Trevsel (PID) tiptekontrolrlerden faydalanld bilinmektedir [9].
eitlideneyler sonucunda en uygun PID tipinin salt integral
etkisi
ieren kontrolr olduu sonucuna varlm ve integralkatsaysnn
seiminde de sistemin cevabnn kabuledilebilirlii gz nne alnarak
deneme yanlma yolunagidilmitir.
ekil 7 Yerel Eik Deer Yntemi (a)RGB formatndakigrnt (b)Medyan
szge k (c)YED yntemi ile eldeedilen grnt
Sistemde hata hesaplanrken cismin merkezden uzaklesas alnm,
sistemin cevab ise ataletsel lme birimi ilegzlemlenerek sarkacn as
gerek zamanda kontrolbilgisayarna alnmtr. Sabit cisim grntde
merkezegelirken sarka sisteminin asnn da sabit bir deereyaknsad
grlmtr. Sistemdeki hatann deiimi veataletsel lme biriminden alnan a
bilgisi ekil 8degsterilmektedir. ekle gre st izgede deeri 0 ile
255arasnda deien DGM sinyali (p) gsterilmekte, Ts isernekleme
periyodunu temsil etmektedir. Cisim sabit olduu
iin sistem belirli bir ada cismi ortalamakta ve yerekimietkisini
yenerek bu ada kalabilmek iin motor itkisinisfrdan farkl sabit bir
deerde tutmas gerekmektedir.Ortadaki izgede ise resim merkezi ile
tespit edilen cisimmerkezi arasndaki fark -sadece x ekseni
iin-gsterilmektedir. Sistem almaya baladnda cisim grntdndadr ve
cisim grnt iine girene dek geri beslemebilgisi 0, istenen nokta ise
160. piksel olduundan balanghatas byk olur, bu nedenle ekilde de
grld zerenesnenin alglanmas/tannmas esnasnda hzl bir
geigzlemlenmektedir. En altta ise istenen grntnn sarkacn 45asnda
iken elde edildii grlmektedir. Her ne kadarelde edilen kontrolr
basit ve bulgular mspet de olsa
(a)
(b) (c)
(a)
(b) (c)
618
-
7/21/2019 Bir Sarka Sisteminde Video Geri Beslemesi Ile Gerek
Zamanl Denetim
4/6
sistemdeki kk salnmlarn bertaraf iin bir sonrakiksmda bulank
denetim yaklam zerinde durulacaktr.
5.2. Bulank Mantk Kontrolr
Bulank mantk yntemi 1960l yllarda klasik matematikselyelik
atamasndan farkl olarak ortaya kmtr. Klasik
matematiksel yntemlerde bir eleman bir fonksiyona ya yedirya da
deildir. Bulank mantkta ise oluturulan yelikfonksiyonlarna gre bir
yelik derecesi belirlenir ve bu yelikderecelerine gre sistemin k
deeri hesaplanr [1].
0 2 4 6 8 10 12 14 16 180
50
100
150
200
250
0 2 4 6 8 10 12 14 16 18
-100
0
100
0 5 10 15 20
0
20
40
60
80
100
ekil 8 - ntegral Kontrolr le Elde Edilen Sonular
Bu almada ele alnanbulank mantk kontrolrndegiri vektr grnt
analizi sonucu elde edilen merkezdeerin x-ekseni bileeninin grntde
x ekseniorta noktasnaolan uzakl (x) ve motordaki itkinin deiim
miktar (p)ile oluturulmutur. Bu iki deikene gre bulank
mantkkontrolr yardmyla nesne x ekseninde merkezde tutulmayaallmtr.
Seilen deikenlere gre belirlenen genselyelik fonksiyonlar ekil
9daki gibi tanmlanm, bulankkontrolrde arpm karsamas kullanlm ve
arlklortalama yntemi ile durulatrma ilemi gerekletirilmitir.Tasvir
edilen bulank mantk kontroln (2) ifadesinde kapalolarak
verilenFilevi gerekler.
1 ( , )k k kp F p x (2)
ekil 9da tasvir edilen uzay zerinde tanmlanmdurulatrma katsaylar
simetrik seilmemitir. Bunun nedeniise sarka sisteminde yukarya doru
ivmelenme ve aayadoru ivmelenme olgularnn fiziksel olarak simetriye
sebepolacak olgular olmamasdr. Cismin arlndan dolay aadoru
ivmelenirken seilen katsay grece biraz daha dk birdeerken yukar kma
hareketi yerekimine direnmeyigerektirdiinden kaldrma ilemi iin
ivmelenme katsaysaa ivmelenmeye gre bal olarak daha byk
olmaldr.
Pervanenin ters ynde evrilememesi ise kontrol sinyalini
dolaysyla hareketi- kstlayan nemli bir etkendir.
Seilen deiken ve yelik fonksiyonlar sonucu oluankontrol yzeyi
ekil 10da gsterilmitir.ekildeki basamaklyap bulank mantk knn -
DGMyi belirleyen deer- tamsay olarak deimesinden kaynaklanmaktadr.
Dier birdeyile bulank kontrolrde DGM sinyalinin yeni deeri
yerine
u anki deerinden itibaren verilmesi gereken
farkngerekletirilmesidir. ntegral kontrolde olduu gibi
sistemcevabnn izlenmesi iin ataletsel lme birimi kullanlmtr.Bulank
mantk kontrolryle de sarka sistemi kontrolsrecinde sabit bir aya
yaknsamaktadr. Sistemdeki hatanndeiimi ve ataletsel lme biriminden
okunan a bilgisininzamana gre deiimleride ekil
11degsterilmektedir.
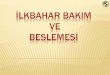
ekil 9 - yelik Fonksiyonlar
ekil 9da verilen yelik fonksiyonlar denklem (3)dendenklem (12)e
kadar tanmlanmtr.
60mxxn max 0,min 1,
60
x
(3)
x+120 10 xmxn max 0, min ,
60 50
(4)
x+60 60 xmxz max 0, min min ,1 ,
50 50
(5)
x 10 120 xmxp max 0, min ,
50 60
(6)
x 60mxxp max 0, min ,1
60
(7)
2 pmpxn max 0,min 1,
3
(8)p+5 p
mpn max 0, min ,3 2
(9)
p+2 2 pmpz max 0, min ,
2 2
(10)
p 5 pmpp max 0, min ,
2 3
(11)
p 2mpxp max 0,min 1,
3
(12)
619
-
7/21/2019 Bir Sarka Sisteminde Video Geri Beslemesi Ile Gerek
Zamanl Denetim
5/6
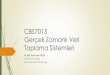
ekil 11de sunulan neticeler integral kontrolr ile eldeedilen
neticelerle kyaslandnda bulank kontrolrn yerelkararlarn
tmletirilmesi esasna dayanmasndan dolay olayuzaynda karar znrlnn
artmasna, dolaysylabaarmn ve karmakln da artmasna yol amtr. En
stizgede DGM deeri, ikinci izgede bulank kontrolr ksinyali, nc
srada piksel olarak hata deeri ve en altta da
nesneyi x ynnde ortalayan sarka as gsterilmi,salnmlarn azald,
geici rejimin hzlandgzlemlenmitir.
-100
0
100
-10
-5
0
5
10
-2
0
2
4
xk
pk
pk+1
ekil10 - BulankKontrolr k
0 2 4 6 8 10 12 14 160
50
100
150
200
250
0 2 4 6 8 10 12 14 16-5
0
5
0 2 4 6 8 10 12 14 16
-100
0
100
0 2 4 6 8 10 12 14 16
0
20
40
60
80
100
ekil 11 - Bulank Kontrolr le Elde EdilenSonular
6. Sonular
Grnt tabanl gerek zamanl kontrol, otomatik kontrolbilimi asndan
fevkalade nem arz eden, ve mikroilemci vevideo edinme
teknolojisinin hzla gelimesiyle gn getikeuygulanabilirlii
eitlenerek artan bir alandr. Bu almadaileriye dnk bir grnt tabanl
kontrol projesinin n
bulgular rapor edilmekte ve geri beslemeli sistemin
tmbileenlerinin uygun altn gstermek iin bir sarkasistemi zerine
monte edilen kamera grnts zerinde bazperformans ltlerinin
karlanabildii gsterilmektedir.
Sarka sisteminin tek hareket serbestisine sahip olmas vekamerann
bu sarka sistemi zerine sabitlenmi olmas, gralan ierisinde sabit
duran bir cismin kamera hareket ettikevideoda yay biimli bir eri
zerinde hareket edebileceineiaret eder. Bu durumda cisim kamera
grnts zerinde biryrngeye kstlanr ve baarm ltleri bu yrnge
zerindentanmlanr. Bu almada znrln daha yksek olmasdolaysyla aranan
cismin x ekseni ynnde ortaya alnmasproblemi allmtr.
Bildiriye eitli deneyler sonucunda integral kontrolr ve
bulank kontrolr ile elde edilen neticeler konmu, buna
sebepolarak da dinamik modelin gelitirilmesine gerek kalmadangrsel
alglarla kapal evrim kontroln gereklenmesizerinde durulmutur.
Sunulan sonulara gre her ne kadar ilemsel karmakldaha fazla da
olsa bulank mantk kontrolrnn daha iyibaarm gsterdii
gzlemlenmitir.
almada verilmemesine karn cismin hareketli olduudurumlar iin de
deneyler yaplm ancak sistemin hzlhareketi alglamakta ve x-ekseninde
ortalayarak takip etmekteglklerinin olduu tehis edilmitir. Bu
durumun en temelsebebinin ise negatif kontrol sinyalinin
uygulanamamasolduu yargsna varlmtr.
Yazarlarn ileriye dnk amac bu neticeleri gelitirerek
dnerkanat tipinde bir insansz hava aracyla otonom yrngetakibi ve
grntleme yapabilmektir.
7. Teekkr
Bu alma 107E137 numaral TBTAK projesi tarafndandesteklenmitir.
Yazarlar TOBB ET nsansz Hava AralarLaboratuarna ve TOBB ET
Ktphanesine teekkr eder.
8. Kaynaka
[1] K.M. Passino, S. Yurkovich, Fuzzy Control, Addison-Wesley
Longman Inc., Menlo Park, California, pp. 23-99,1998.
[2] S.W. Nawawi, M.N. Ahmad, and J.H.S. Osman, Real-Time Control
of a Two-Wheeled Inverted PendulumMobile Robot, International
Journal of Computer,Information, and Systems Science, and
Engineering,Vol.2, No.1, pp. 70-76, 2008.
[3] A. Shimada, N. Hatakeyama, High-Speed MotionControl of
Inverted Pendulum Robots, 9th IEEEInternational Workshop on
Advanced Motion Control,pp. 307-310, May, 2006.
[4] R.C. Gonzalez and R.E. Woods, Digital imageProcessing, pp.
322-335, 394-451, 461-474 & 738-763,Pearson Prentice Hall,
Upper Saddle River, New Jersey,2008.
620
http://ieeexplore.ieee.org/xpl/RecentCon.jsp?punumber=10858http://ieeexplore.ieee.org/xpl/RecentCon.jsp?punumber=10858http://ieeexplore.ieee.org/xpl/RecentCon.jsp?punumber=10858http://ieeexplore.ieee.org/xpl/RecentCon.jsp?punumber=10858http://ieeexplore.ieee.org/xpl/RecentCon.jsp?punumber=10858
-
7/21/2019 Bir Sarka Sisteminde Video Geri Beslemesi Ile Gerek
Zamanl Denetim
6/6
[5] P.J. Burt, E.H. Adelson, The Laplacian Pyramid as aCompact
Image Code, IEEE Transactions onCommunications, Vol. Com-31, No. 4,
pp. 532-540,April, 1983.
[6] A.E. Savakis, Adaptive Document Image ThresholdingUsing
Foreground and Background Clustering,Proceedings of International
Conference on Image
Processing ICIP, Vol. 3, pp. 785-789, 1998.[7] Q. Huang, W. Gao,
W. Cai, Thresholding Technique
with Adaptive Window Selection for Uneven LightingImage,Pattern
Recognition Letters, 26, 801808, 2005.
[8] P.L. Rosin, T. Ellis, Image Difference ThresholdStrategies
and Shadow Detection, Proceedings of the6th British Machine Vision
Conference, Vol.1, pp. 347-356, 1995.
[9] K. Ogata, Modern Control Engineering, pp. 62-67
&281-288, Prentice Hall, 4th Edition, Upper Saddle River,New
Jersey, 2002.
621