Embed Size (px)
Citation preview

机械与运载工程学院湖南大学
College of Mechanical & Vehicle Engineering
Hunan University
崔向阳
杆与桁架结构
第4讲:

有限单元法 崔向阳 21:152
杆的基本方程
1u l l
l
1bFFb
1l
从杆件拉伸说起:
u
l 应变
NF F
A A 应力
E 本构方程

有限单元法 崔向阳 21:153
杆的基本方程
考虑一个微元:
xx x xdx A A b A Adx u
x
x
u
dx
udxx
uu
x
)(
xxb u
x
若不考虑惯性项 0x
xbx
几何方程
平衡方程
u uu dx
x
dx
dxx
dx

有限单元法 崔向阳4
杆的基本方程
xxb u
x
(静态)
本构方程 E
平衡方程
0xxb
x
几何方程 x
u
x
p
力边界条件Γq0x x xn p
位移边界条件Γuu u
单位体积的应变能(应变比能)
0
1
2x xU
1
2x x
LU Adx
杆件的应变能

有限单元法 崔向阳
杆的弱形式
5
杆问题的等效积分形式为:
d d 0q
xx x x xu b u u n p
x
对第一项分部积分可得:
d d dxx x
uu u
x x x
散度定理
d dx x x
uu n
x
在边界Γu上,δu=0,且: ,故:u q d d
qx x x xu n u n
d d dq
x x x x
uu u n
x x

有限单元法 崔向阳
杆问题的弱形式
6
杆问题的等效积分形式为:
d d 0q
xx x x xu b u u n p
x
d d dxx x
uu u
x x x
散度定理
d dx x x
uu n
x
在边界Γu上,δu=0,且: ,故:u q d d
qx x x xu n u n
d d dq
x x x x
uu u n
x x
d d d d 0q
x x x
uub up u u
x

有限单元法 崔向阳
简单杆系问题的有限元求解过程
F
7

有限单元法 崔向阳
Step 1.几何离散
2个单元(编号:1,2)
3个节点(编号:1,2,3)
整体节点位移列阵
3
2
1
u
u
u
d
1 1
2
3
0
f R
f
Ff
f
整体等效节点力列阵
8
F

有限单元法 崔向阳
Step 2.单元特征分析
单元节点位移列阵:1
2
eie
ej
uu
uu
d
单元等效节点力列阵: 1
2
e
e
e
P
P
f
1
2
eie
ej
xx
xx
x单元节点坐标列阵:
xi xj
9

有限单元法 崔向阳
0 1
0 1
( )
( )
i i i
j j j
u x a a x u
u x a a x u
利用节点条件:
0
1
( ) /( ) ( ) /( ) ( ) /
( ) /( ) ( ) /
e
j j j i j i j i i j j i j i i j
e
j i j i j i
a u x u u x x x u x u x x x u x u l
a u u x x u u l
( ) / ( ( ) ( )e
j i i j j i j i i ju x u x u l x u u x x u x x u
[( ) / ( ) / ]ie e e
j i
j
uu x x l x x l
u
φd
构造单元位移模式:0 1u a a x
Step 2.单元特征分析
10

有限单元法 崔向阳
单元特征分析—应变、应力
eu φd ( ) / ( ) /e e
j ix x l x x l φ
e
x
u
x
Bd1 1e el l
B
e e
x xE Sde e
e
e e
E EE
l l
S B
形状函数矩阵
应变矩阵
应力矩阵
Step 2.单元特征分析
11

有限单元法 崔向阳 12
将上述各式代入方程,对于单元可以得到:
2 2
1 1
2
1
1
2
1
2
0
e e
e e
e
eeq
ex xT T
e T e e T e
xex x
exT T
e T e e T e
x exx
uA dx b A dx
u
up A dx
u
d B S d φ
d φ d φ φ
Step 2.单元特征分析
d d d d 0q
x x x
uub up u u
x
因为δde为任意值,且S=EeB,上式可表示为:
2 2
1 1
2
1
1
2
1
2
0
e e
ee eq
e
e
ex x
T e e T e T
x xe xx x
ex
e T e
ex
uE A dx b A dx p
u
uA dx
u
B B φ φ
φ φ

有限单元法 崔向阳
Ke—单元刚度矩阵
Step 2.单元特征分析
13
2
1
1 1
3 6
1 1
6 3
e
e
xe e T e e e e
xA dx A l
M φ φ
0e e e e e K d f M d
令:
2
1
1 1
1 1
e
e
e ex
e T e e
ex
E AE A dx
l
K B B
2
1
e
eeq
xe T e T
x x xxb A dx p
f φ φ
上式可表示为:
fe —单元等效节点力
Me —单元质量矩阵

有限单元法 崔向阳
单元2单元1
对于整个问题域,等效积分方程可表示为
Step 3: 单元集成
14
1 1 1 1 1 2 2 2 2 2 0e e e e e e e e e e K d f M d K d f M d
(1) (1) (1) (1)
(1) (1)1
(1) (1) (1) (1)2
(1) (1)
E A E A
ul l
uE A E A
l l
(2) (2) (2) (2)
(2) (1)2
(2) (2) (2) (2)3
(2) (2)
E A E A
ul l
uE A E A
l l
(1) (1) (1) (1)
(1) (1)
(1) (1) (1) (1) (2) (2) (2) (2)
(1) (1) (2) (2)
(2) (2) (2) (2)
(2) (2)
0
0
E A E A
l l
E A E A E A E A
l l l l
E A E A
l l
1
2
3
u
u
u
Kd

有限单元法 崔向阳
Step 3: 单元集成
15
1 1 1 1 1 2 2 2 2 2 0e e e e e e e e e e K d f M d K d f M d
( 2)2
( 2)
1
11
1 2
2
1 0
0 1
e
eeq
xe T e T
x x xxxx
Rb A dx p R P
P
f φ φ
(1)
(1)2
1
2 22
1 0
0 1
e
eeq
xe T e T x
x x xxx
Pb A dx p P F
F
f φ φ
( 2)
2xP1R
单元11 2
F
单元22 3
(1)
2xP
( 2) (1)
1 1
1 2
2 2 0e e
x x
R R
P P
F F
f f f因为此问题不是动力学问题,故不
需要计算质量矩阵。计算质量矩阵
的方式可参考刚度矩阵。
系统方程可表示为:
0 Kd f

有限单元法 崔向阳
求出节点位移和约束反力
Step 4. 施加边界约束
16
(1) (1) (1) (1)
(1) (1)
(1) (1) (1) (1) (2) (2) (2) (2)
(1) (1) (2) (2)
(2) (2) (2) (2)
(2) (2)
0
0
E A E A
l l
E A E A E A E A
l l l l
E A E A
l l
1 1
2
3
0
u R
u
u F
Kd f 位移边界条件 1 0u
Step 5: 计算每个单元的应变及应力

有限单元法 崔向阳
简单杆系问题有限元求解过程
1. 几何离散:m个单元和n个节点的组合体
2. 单元特征分析
单元形函数、应变矩阵、应力矩阵
单元刚度矩阵
等效节点力
3. 单元集成:系统方程的形成
4. 应用位移边界条件求出节点位移
5. 由节点位移求出单元的应变、应力
17

有限单元法 崔向阳
桁架结构
桁架结构在生活中的重要性
桁架结构的分类:
平面桁架
空间桁架
桁架结构的特点:
桁架的节点为铰接节点
杆件只承受轴力
桁架结构的基本构件: 杆件
桁架机构的有限元离散为自然离散。
18

有限单元法 崔向阳
桁架单元
D3i - 1
D3i - 2
D3i
D3j - 1
D3j - 2
D3j
le
x
u1
u2
u(x)
fs1
fx
global node j
local node 2
global node i
local node 1
fs2
X
Y
Z
o
0
考虑一个桁架单元:
整体坐标系和局部坐标系
对于一个结构,整体坐标系一
般只有一个;局部坐标系有多
个,一个单元就有一个局部坐
标。
对于一个桁架单元,沿其轴向
建立局部坐标系,则其可视为
一个杆单元,其局部节点编号
1、2对应整体节点编号i、j。
空间节点位移(u, v, w)可等效
为局部节点位移( )。u在有限元中,一般在局部坐标系内进行单元分析。
19

有限单元法 崔向阳
单元分析
在局部坐标系内考虑一桁架单元:· ·i j
l
x
2u1u
xb
1xp 2xp
(1)位移模式和形函数
① 位移模式
因为只有2个结点,每个结点位移只有1个自由度,因此
单元的位移模式可设为:
1 2ˆ ˆu a a x
② 形函数
利用位移模式,可求得单元的形函数为:
1 2
ˆ ˆ[1 ]
x x
l l φ ˆ( ) eu x φd
节点位移: T
1 2ˆ ˆ ˆe u ud
20

有限单元法 崔向阳 21
单元分析
(2)应变矩阵
u
x
代入
1 ˆ[ 1 1] e
l d
ˆ( ) eu x φdˆ ˆ
[1 ]x x
l l φ
上式也可写为ˆ e Bd
式中B为应变矩阵1
[ 1 1]l
B

有限单元法 崔向阳 22
单元分析(3)应力矩阵
由应力应变关系
E
ˆ ˆe eE Bd Sd
ˆ e Bd
式中S为应力矩阵
[ 1 1]E
l S

有限单元法 崔向阳
单元分析(4)刚度矩阵
单元刚度矩阵由前面给出
0
ˆel
e T e eE A dx K B B
对于等截面杆单元(截面积为A) 有:
1 1ˆ
1 1
e ee
e
E A
l
K
0
ˆel
e e T eA E dx K B B
1[ 1 1]
l B
23

有限单元法 崔向阳
单元分析(5)等效节点力
单元上作用分布力bx,则等效节点力计算公式为以下形式:
Tˆ +eq
e T
x x xb dx p
f φ φ
当分布力集度bx为常数时,有
01
11ˆ + +12
e node
eq j
e Nel
e T xx x xe x x x
j
l x b lb dx p p
l x
f φ φ
1 2
ˆ ˆ[1 ]
x x
l l φ
24
其中: 为沿杆轴线方向集中力大小。xp

有限单元法 崔向阳
平面桁架单元
看成局部坐标下的拉压杆
考虑一平面桁架单元如图:
y
u1
v1
u2
v2
i
j
x
α
x
1u
2u
单元坐标单元位移向量
1
2
ˆˆ
ˆ
eu
u
d
1
1
2
2
e
u
v
u
v
d整体坐标系下: 局部坐标系下:
25

有限单元法 崔向阳
平面桁架单元
1
2
ˆˆ
ˆ
eu
u
d
1
1
2
2
e
u
v
u
v
d
相互关系
由坐标变换易知: ˆ cos sini i iu u v
则: ˆ e ed Tdcos sin 0 0
0 0 cos sin
T
显然,局部节点载荷与整体载荷向量之间的关系可同理给出:
ˆe ef Tf Tˆe ef T f
26

有限单元法 崔向阳
平面桁架单元前面所讨论的Ke, Fe, ε, σ 都是在单元的局部坐标下进行的。由于
杆件系统在空间中各有自己的方向,都建立了各自的坐标系,
而分析中都必须统一在一个整体坐标中进行,显然,我们需要
基于局部坐标系下的单元分析找出整体坐标系下节点力和节点
位移的关系,也就是整体刚度矩阵,也就是:
ˆˆ ˆe e eK d f
e e eK d f
27

有限单元法 崔向阳
平面桁架单元
ˆˆ ˆe e eK d fˆ e ed Td
ˆˆ e e eK Td f
Tˆe ef T f
ˆ e e eTT K Td f
e e eK d f
ˆe e TK T K T
2 2
2 2
2 2
2 2
cos cos sin cos cos sin
cos sin sin cos sin sin
cos cos sin cos cos sin
cos sin sin cos sin sin
e EA
l
K
28

有限单元法 崔向阳
空间桁架单元
ˆe ed Td
其中
eijijij
ijijij
nml
nml
000
000T
3 2
3 1
3
3 2
3 1
3
i i
i i
i ie
j j
j j
j j
D u
D v
D w
D u
D v
D w
d
ˆcos( , )
ˆcos( , )
ˆcos( , )
j i
ij
e
j i
ij
e
j i
ij
e
x xl x x
l
y ym x y
l
y yn x z
l
D3i - 1
D3i - 2
D3i
D3j - 1
D3j - 2
D3j
le
x
u1
u2
u(x)
fs1
fx
global node j
local node 2
global node i
local node 1
fs2
X
Y
Z
o
0
考虑一空间桁架单元,其局部与整体坐标
系下节点位移的关系:
方向余弦
29

有限单元法 崔向阳
空间桁架单元对于空间桁架
2 2 2( ) ( ) ( )e j i j i j il x x y y z z
节点力向量之间的关系可表示为:
ˆe ef Tf 其中
3 2
3 1
3
3 2
3 1
3
i xi
i yi
i zie
j xj
j yj
j zj
f f
f f
f f
f f
f f
f f
f
D3i - 1
D3i - 2
D3i
D3j - 1
D3j - 2
D3j
le
x
u1
u2
u(x)
fs1
fx
global node j
local node 2
global node i
local node 1
fs2
X
Y
Z
o
0
30

有限单元法 崔向阳
空间桁架单元
2 2
2 2
2 2
2 2
2 2
ˆ
e T e
ij ij ij ij ij ij ij ij ij ij
ij ij ij ij ij ij ij ij ij ij
ij ij ij ij ij ij ij ij ij ij
ij ij ij ij ij ij ij ij ij ije
ij ij ij ij ij ij ij ij ij ij
ij
l l m l n l l m l n
l m m m n l m m m n
l n m n n l n m n nAE
l l m l n l l m l nl
l m m m n l m m m n
l
K T K T
2 2
ij ij ij ij ij ij ij ij ijn m n n l n m n n
则空间桁架单元在整体坐标系下的单元刚度矩阵可表示为
31

有限单元法 崔向阳
算例分析受垂直载荷作用的三角形桁架结构如下图所示,各杆件的截面
积A=0.1m2,弹性模量E=7.0×1010N/m2,试求出各杆件所受的
应力值。
32

有限单元法 崔向阳
算例分析
对于单元1:
节点信息
局部节点编号
全局节点编号
节点坐标
节点1 1 0, 0
节点2 2 1, 0
方向余弦
cosα sinα
1 0
2 2
2 2
2 2
2 2
cos cos sin cos cos sin
cos sin sin cos sin sin
cos cos sin cos cos sin
cos sin sin cos sin sin
e EA
l
K
33

有限单元法 崔向阳
算例分析
对于单元2:
节点信息
局部节点编号
全局节点编号
节点坐标
节点1 1 0, 0
节点2 3 0, 1
方向余弦
cosα sinα
0 1
2 2
2 2
2 2
2 2
cos cos sin cos cos sin
cos sin sin cos sin sin
cos cos sin cos cos sin
cos sin sin cos sin sin
e EA
l
K
34

有限单元法 崔向阳
算例分析
对于单元3:
节点信息
局部节点编号
全局节点编号
节点坐标
节点1 2 1, 0
节点2 3 0, 1
方向余弦
cosα sinα
2 2
2 2
2 2
2 2
cos cos sin cos cos sin
cos sin sin cos sin sin
cos cos sin cos cos sin
cos sin sin cos sin sin
e EA
l
K
1/ 2 1/ 2
35

有限单元法 崔向阳
算例分析各个单元的刚度矩阵计算完成后,我们需要将这些单元刚度矩阵
组装在一起,形成整体刚度矩阵,来进行分析计算。对于本例子
所给的结构,其节点共3个,系统的自由度数目为6,那么整体刚
度矩阵应为一个6×6的矩阵。组装方式就是将各个单元刚度矩阵
对某节点的贡献放在整体刚度矩阵的相应位置上。
例如:单元1的节点1对自由度D1和D2
有贡献,而单元2的节点1同样对自由度
D1和D2 有贡献,那么我们只需要将单
元1的单元刚度矩阵中相应的项与单元2
的单元刚度矩阵中相应的项叠加在一起
便得到整体刚度矩阵中与自由度D1和D2
相关的项。
36

有限单元法 崔向阳
算例分析
组装刚度矩阵:
将单元1的单元刚度矩阵放入整体刚度矩阵
37

有限单元法 崔向阳
算例分析
组装刚度矩阵:
将单元2的单元刚度矩阵放入整体刚度矩阵
38

有限单元法 崔向阳
算例分析
组装刚度矩阵:
将单元3的单元刚度矩阵放入整体刚度矩阵
39

有限单元法 崔向阳 4021:15
算例分析
得到整体刚度矩阵:

有限单元法 崔向阳 4121:15
算例分析
其力学意义:
3 3 3 3 3
11 3 12 3 13 5 14 6 3
e e e e eK D K D K D K D F

有限单元法 崔向阳 4221:15
算例分析
施加边界条件:

有限单元法 崔向阳 4321:15
算例分析
施加边界条件后得到的平衡方程:

有限单元法 崔向阳 4421:15
算例分析
求解平衡方程:

有限单元法 崔向阳 4521:15
算例分析

有限单元法 崔向阳46
21:15
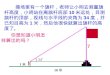
图为两杆桁架结构,杆的横截面积A均为1,杆的长度l均为1,弹
性模量E=1.0,所受约束和载荷如图所示,试采用有限元计算:
1)求出点C处的位移u, v
2)计算两铰接点A、B处的约束反力。
B
C
A
1.0F
45 45
作 业

有限单元法 崔向阳47
21:15
作业讲解
解:假设A点为节点1,B点为节点2,,C点为
节点3,则图示桁架结构离散为两个单元,分
别为单元1(3,1)和单元2(3,2)。
B
C
A
1.0F
45 45
计算整体坐标系下的单元刚度矩阵:
对于单元1,方向余弦
1/ 2, 1/ 2ij ijl m
2 2
2 2
1
2 2
2 2
0.5 0.5 0.5 0.5
0.5 0.5 0.5 0.5
0.5 0.5 0.5 0.5
0.5 0.5 0.5 0.5
ij ij ij ij ij ij
ij ij ij ij ij ij
ij ij ij ij ij ij
ij ij ij ij ij ij
l l m l l m
l m m l m mAE
l l m l l ml
l m m l m m
K

有限单元法 崔向阳48
21:15
作业讲解
B
C
A
1.0F
45 45
对于单元2,方向余弦
1/ 2, 1/ 2ij ijl m
2 2
2 2
2
2 2
2 2
0.5 0.5 0.5 0.5
0.5 0.5 0.5 0.5
0.5 0.5 0.5 0.5
0.5 0.5 0.5 0.5
ij ij ij ij ij ij
ij ij ij ij ij ij
ij ij ij ij ij ij
ij ij ij ij ij ij
l l m l l m
l m m l m mAE
l l m l l ml
l m m l m m
K
整体刚度矩阵组装
1 2
0.5 0.5 0 0 0.5 0.5
0.5 0.5 0 0 0.5 0.5
0 0 0.5 0.5 0.5 0.5
0 0 0.5 0.5 0.5 0.5
0.5 0.5 0.5 0.5 1 0
0.5 0.5 0.5 0.5 0 1
K K K
整体载荷向量0
0
0
0
0
1
f

有限单元法 崔向阳49
21:15
作业讲解
B
C
A
1.0F
45 45
系统平衡方程
1
1
2
2
3
3
0.5 0.5 0 0 0.5 0.5 0
0.5 0.5 0 0 0.5 0.5 0
0 0 0.5 0.5 0.5 0.5 0
0 0 0.5 0.5 0.5 0.5 0
0.5 0.5 0.5 0.5 1 0 0
0.5 0.5 0.5 0.5 0 1 1
u
v
u
v
u
v
施加位移约束:
1
1
2
2
3
3
0.5 0.5 0 0 0.5 0.5 0
0.5 0.5 0 0 0.5 0.5 0
0 0 0.5 0.5 0.5 0.5 0
0 0 0.5 0.5 0.5 0.5 0
0.5 0.5 0.5 0.5 1 0 0
0.5 0.5 0.5 0.5 0 1 1
u
v
u
v
u
v
则可计算得到u3=0,v3=-1
将其代入系统平衡方程,可计算得到A、B两点处约束反力
0.5, 0.5
0.5, 0.5
Ax Ay
Bx By
f f
f f

有限单元法 崔向阳 50