Embed Size (px)
DESCRIPTION
Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011Cảm biến hoá học hoạt động trên cơ sở sóng âm bề mặt và ứng dụng đo độ ẩm Chemical sensors based on surface acoustic wave and its application for humidity measurementHoàng Sĩ Hồng, Trần Mạnh Hà, Trần Thị Thuỳ Dung Bộ môn Kỹ Thuật Đo và Tin Học CN-Viện Điện-Trường ĐHBK Hà Nội e-Mail: [email protected] Tóm tắtBài báo giới thiệu nguyên lý và cấu tạo của một loại cảm biến hoá học mới hoạt động trên cơ sở sóng âm bề mặt (SAW) của
Citation preview

Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011
VCCA-2011
Cảm biến hoá học hoạt động trên cơ sở sóng âm bề mặt và ứng dụng
đo độ ẩm
Chemical sensors based on surface acoustic wave and its application for
humidity measurement
Hoàng Sĩ Hồng, Trần Mạnh Hà, Trần Thị Thuỳ Dung
Bộ môn Kỹ Thuật Đo và Tin Học CN-Viện Điện-Trường ĐHBK Hà Nội
e-Mail: [email protected]
Tóm tắt Bài báo giới thiệu nguyên lý và cấu tạo của một loại
cảm biến hoá học mới hoạt động trên cơ sở sóng âm
bề mặt (SAW) của vật liệu áp điện. Đồng thời qua đó
phát triển một cảm biến đo độ ẩm trên cơ sở sóng bề
mặt sử dụng vật liệu áp điện màng mỏng AlN phủ
trên đế silicon. Vật liệu nhạy được sử dụng là oxit
kim loại ZnO. Kết quả đo cho thấy cảm biến có độ
nhạy cao (theo độ dịch tần số) là khoảng 220 kHz
tương ứng với độ ẩm thay đổi từ 10 đến 90% RH. Bên
cạnh đó, sự ảnh hưởng của nhiệt độ đến cảm biến
cũng được khảo sát và đánh giá.
Abstract:
In this work, the novel chemical sensors based on
surface acoustic wave (SAW) of a piezoelectric
material layer were introduced. The principle and
structure of these sensors also were investigated.
Thus, the SAW humidity sensor using ZnO sensing
layers grown on the AlN/Si substrate were fabricated.
Some experimental results showed that the largest
shift in the frequency response of the SAW humidity
sensor was at approximately 220 kHz for humidity
range from 10 to 90% RH. Besides, the effect of
temperature on to the properties of the SAW humidity
sensor also were discussed and reported.
Ký hiệu Ký hiệu Đơn vị Ý nghĩa
VSAW m/s Vận tốc sóng bề mặt
f MHz Tần số cộng hưởng
λ Μm Bước sóng
T °C Nhiệt độ
E V Trường điện
ε Hằng số điện môi
σ S/m Độ dẫn điện
m Gram Khối lượng
ρ N/m2
Áp suất
V0 m/s vận tốc sóng ban đầu
Chữ viết tắt SAW Surface acoustic wave
IDT Inter-digital transducer
SEM Scanning electron microscope
AlN Aluminum nitride
ZnO Zinc oxide
RH Relative humidity
1. Giới thiệu chung Hiện tại các phương pháp đo các thông số môi trường
như nồng độ chất khí, nhiệt độ và độ ẩm đã và đang
được nghiên cứu rộng rãi ở Việt nam và thế giới. Điều
đó là bởi vì các yếu tố môi trường nói chung và độ ẩm
nói riêng ảnh hưởng nhiều đến các lĩnh vực khác nhau
trong đời sống như sản xuất nông nghiệp, thực phẩm,
môi trường, y tế..vv. Một số phương pháp đo khí hoặc
độ ẩm truyền thống đang được sử dụng bao gồm: cảm
biến kiểu thay đổi điện trở, điện dung và dựa trên sự
thay đổi của tần số cộng hưởng của bộ dao động thạch
anh [1,2]. Vật liệu nhạy có thể là các oxit kim loại có
cấu trúc nano. So với các phương pháp trên thì cảm
biến đo môi trường dựa trên cơ sở sóng âm bề mặt
(SAW-surface acoustic wave) đã được chứng minh có
nhiều ưu điểm vì độ nhạy cao, nhỏ, nhẹ, độ tin cậy
cao và có khả năng chế tạo cảm biến không dây [3].
Trên cơ sở đó một số nhóm nghiên cứu trên thế giới
đã chế tạo và ứng dụng cảm biến SAW đo khí như
CO2, NOX [3,4] và độ ẩm như [5,6]. Tuy nhiên đối
với các cảm biến đo độ ẩm kiểu SAW đã được nghiên
cứu thì vật liệu nhạy được sử dụng chủ yếu là các
polimer tổng hợp [5,6]. Theo đó bài báo này tìm hiểu
và giới thiệu chung về cảm biến SAW đồng thời
nghiên cứu và phát triển một cảm biến đo độ ẩm mới
trên cơ sở sóng âm bề mặt sử dụng vật liệu nền áp
điện là AlN phủ trên đế silicon truyền thống. Lớp vật
liệu nhạy là kiểu màng đa tinh thể oxit kim loại dạng
hạt xốp kích thước nano (nanocrystalline ZnO). Cảm
biến được chế tạo theo phương pháp quang khắc và ăn
mòn thông thường. Cấu trúc bề mặt của cảm biến
được kiểm tra bằng phương pháp chụp ảnh bề mặt
SEM và một số phương pháp đo phân tích vật lý khác
(nhiễu xạ tia X). Môi trường độ ẩm thay đổi từ 10 đến
90% RH được tạo bằng các áp suất hơi bảo hoà thông
qua các dung dịch muối đựng trong bình đo kín như
K2CO3 (tạo 30 % or 50 % RH relative humidity),
CuSO4.5H2O (for 70 % and 90 % RH), và chất hút ẩm
(desiccant) và không khí khô (tạo 10 % RH). Độ ẩm
môi trường đo được xác nhận lại thông qua một máy
đo độ ẩm có độ chính xác cao có bán sẳn trên thị
trường.
2. Kết quả và thảo luận 2.1 Cấu tạo cảm biến
Một cảm biến SAW có nhiều kiểu cấu trúc khác nhau.
Tuy nhiên trong bài báo này chỉ tập trung vào cấu trúc
582

Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011
VCCA-2011
đơn giản nhất là delay-line. Cấu tạo cảm biến được
trình bày như hình 1. Chúng gồm có lớp vật liệu màng
mỏng có tính chất áp điện (piezoelectric) phủ lên một
đế silicon. Hai bộ chuyển đổi tín hiệu (IDT) làm bằng
kim loại được phủ lên trên một đế vật liệu có tính chất
áp điện. Mỗi IDT có cấu trúc gồm hệ thống hai bản
cực hình răng lược đan xem vào nhau và cách li với
nhau. Tùy theo loại khí hoặc độ ẩm muốn nhận biết,
loại vật liệu nhạy có tính chất nhạy tương ứng được
phủ vào khoảng giữa của hai IDT. Trong nghiên cứu
này cảm biến độ ẩm SAW được tác giả thiết kế theo
cấu trúc như trên với các thông số cụ thể như sau: các
IDTs được chế tạo bằng nhôm phủ trên đế áp điện làm
bằng vật liệu AlN/Si (có độ dày h = 1 μm). Phương
pháp bốc bay nhiệt và ăn mòn kim loại đã được sử
dụng để sản xuất các IDT với độ dày khoảng 100 nm
và khoảng cách giữa các ngón tay bằng độ rộng của
mỗi ngón tay là d = 10 μm. Độ chồng giữa hai bản
cực của IDT là W = 4000 μm. Khoảng cách giữa hai
IDT là L = 5 mm. Lớp nhạy vật liệu nhạy ẩm ZnO
được sản xuất bằng phương pháp hoá học sol-gel và
phủ lên toàn bộ bề mặt của cấu trúc bằng phương
pháp phủ quay li tâm và gia nhiệt lại tại nhiệt độ cao
lần lượt tại 400, 500 và 600 °C trong vòng 1 h với
chiều dầy xấp xỉ t = 250 nm.
(a)
(b)
(c)
H. 1 Cấu trúc của cảm biến: (a) hình chiếu cạnh, (b) hình
chiếu bằng và (c) cảm biến SAW độ ẩm
2.2 Nguyên lý hoạt động của cảm biến
Khi cấp cho IDT thứ nhất một điện áp xoay chiều,
theo tính chất của vật liệu áp điện thì điện áp đó sẽ
làm cho vật liệu bị biến dạng và năng lượng điện sẽ
biến đổi thành năng lượng cơ dưới dạng một dao động
cơ học. Các dao động cơ dưới tác dụng của dao động
điện sẽ lan truyền với một vận tốc nào đó (VSAW, phụ
thuộc vào vật liệu áp điện) trên bề mặt của phiến áp
điện, sóng này còn gọi là sóng Raleigh (hình 2).
Các dao động cơ này lan truyền tới phần chuyển đổi
tín hiệu IDT thứ hai và tác động lên phần này. Tại đây
theo nguyên lý của hiệu ứng áp điện thuận, năng
lượng của dao động cơ được IDT chuyển đổi lại thành
năng lượng điện. Như vậy, đặc tính của cảm biến
SAW được biểu hiện qua vận tốc sóng bề mặt (VSAW)
và độ suy hao năng lượng sóng thông qua việc so sánh
tín hiệu vào và ra từ hai bộ phận chuyển đổi IDT
tương ứng.
H.2 Sóng bề mặt Raleigh trên cấu trúc SAW
Mặt khác năng lượng điện từ bộ IDT thứ hai lại tiếp
tục chuyển đổi ngược thành năng lượng sóng cơ và
lan truyền theo chiều ngược lại sẽ cộng hưởng với
sóng bề mặt theo chiều thuận tại một tần số cộng
hưởng f xác định.
Theo nguyên lý trên, khi các tác nhân hóa học như các
phần tử khí hoặc hơi ẩm tương tác với bề mặt của lớp
vật liệu nhạy giữa hai bộ chuyển đổi IDT sẽ gây ra
một sự thay đổi tốc độ truyền sóng và độ suy hao
năng lượng sóng so với trường hợp không có các tác
nhân hóa học tác dụng vào. Sự thay đổi đó là do các
tác nhân hóa học đã làm thay đổi một số tính chất của
vật liệu nhạy như khối lượng, độ dẫn hay độ nhớt và
hệ quả là làm thay đổi đặc tính của sóng truyền trên
bề mặt của cảm biến. Từ sự thay đổi đó, chúng ta sẽ
thiết lập được mối liên hệ giữa vận tốc sóng bề mặt
hay độ suy hao với các tín hiệu cần đo như nồng độ
khí hay hơi ẩm. Nhìn chung, sóng Raleigh rất nhạy
với các tác nhân bề mặt, do đó các cảm biến hóa học
dựa trên đặc tính SAW có độ nhạy rất cao.
Như vậy, dưới các tác nhân ảnh hưởng đến đặc tính
của SAW thì vật liệu nhạy và đế áp điện dóng vai trò
quan trọng trong việc quyết định tính chất của cảm
biến hóa học kiểu SAW. Vận tốc sóng bề mặt (VSAW)
được đo thông qua đo tần số cộng hưởng (f) và bước
sóng (λ) của cảm biến SAW [7].
4SAW f f dV (1)
Ở đây tần số cộng hưởng f được đo bằng một network
analyzer [7], d là độ rộng của các thanh IDT như hình
1(b).
2.3 Cảm biến SAW đo độ ẩm sử dụng cấu trúc
ZnO/AlN/Si
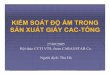
Hình 3 (a,b,c) chỉ ra cấu trúc bề mặt của vật liệu nhạy
ZnO được chế tạo thông qua phương pháp nhiệt nung
lại tại các nhiệt độ 400, 500 và 600 °C. Bề mặt của
lớp nhạy ôxit kim loại có cấu trúc dạng hạt và xốp với
kích thước khoảng 19.23, 29.13 and 43.8 nm tương
ứng với nhiệt độ nung 400, 500 và 600 °C. Cấu trúc
583
Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011
VCCA-2011
này đã được chứng minh thích hợp cho việc hút ẩm
[8]. Trong khi đó bề mặt của lớp vật liệu áp điện
(AlN/Si) không có cấu trúc dạng hạt xốp (hình 3d) và
kích thước hạt bề mặt lớn hơn. Một số tính chất khác
như độ định hướng tinh thể của vật liệu áp điện và lớp
nhạy được đo bằng phương pháp nhiễu xạ tia X tạm
thời chưa thảo luận ở bài báo này.
(a) (b)
(c ) (d)
H.3 Ảnh bề mặt của lớp nhạy ZnO của cảm biến SAW được
chế tạo tại nhiệt độ nung khác nhau: (a) 400 °C, (b) 500 °C,
(c) 600 °C và (d) bề mặt lớp áp điện AlN.
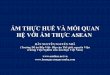
Hình 4 chỉ ra kết quả thử nghiệm của cảm biến SAW
với cấu trúc ZnO/AlN/Si theo sự thay đổi độ ẩm từ 10
đến 90% RH. Trong đó độ dịch tần số (frequency
shift) chính là Δf = f-f0, ở đây f0 là tần số cộng hưởng
của cảm biến tại độ ẩm 10% RH và f là tần số cộng
hưởng của cảm biến tại cad giá trị độ ẩm từ 10, 30,
50, 70 và 90% RH. Tần số cộng hưởng f0 có thể đặc
trưng cho vận tốc sóng bề mặt VSAW theo như công
thức (1) đã được trình bày như ở phần trên.
H.4 Ảnh bề mặt của lớp nhạy ZnO của cảm biến SAW được
chế tạo tại nhiệt độ nung khác nhau: (a) 400 °C, (b) 500 °C,
(c) 600 °C và (d) bề mặt lớp áp điện AlN.
Qua đó nhận thấy rằng với mẫu cảm biến có lớp nhạy
được nhiệt nung tại 400 °C có độ dịch giảm tần số
cộng hưởng lớn nhất (khoảng 220 kHz đối với độ ẩm
từ 10 đến 90% RH). Kết quả này là lớn hơn so với 14
kHz đối với cảm biến SAW sử dụng vật liệu nhạy
polyXIO [6] và 40 kHz với trường hợp vật liệu nhạy là
Meso-tetra porphyrin (TPPS4) [5]. Kết quả này được
giải thích thông qua bề mặt của vật liệu như hình 3. Với
mẫu nung tại 400 °C thì các hạt xốp bề mặt có kích
thước bé nhất do vậy diện tích riêng bề mặt tiếp xúc
với môi trường ẩm là lớn nhất điều đó cho kết quả mẫu
400 °C có độ nhạy ẩm lớn nhất. Mặt khác cơ chế nhạy
ẩm của cảm biến được giải thích cụ thể hơn theo công
thức (2) và (3) đã được báo cáo từ các nghiên cứu
trước đây [8,9].
2
00
02 2( ) 2
ZnH O O Zn OH Zn V e
(2)
0
v v v v v vT E m p
T E m p
v
v
(3)
Từ công thức (2) chúng ta thấy rằng khi các phần tử
hơi nước được hấp phụ vào bề mặt dạng hạt xốp hoặc
lỗ rỗng nhỏ (kích thước cở nanometer) của lớp nhạy
ZnO, kết quả tạo ra các điện tử tự do. Do vậy độ dẫn
điện (σ) của lớp nhạy phủ lên phương truyền sóng
tăng lên và đồng thời khối lượng (m) của lớp nhạy
cũng tăng lên …Theo đó từ công thức (3), vận tốc
sóng bề mặt (ΔV) sẽ bị ảnh hưởng theo chiều hướng
giảm vận tốc. Kết quả là tần số cộng hưởng của cảm
biến SAW sẽ bị dịch theo chiều giảm.
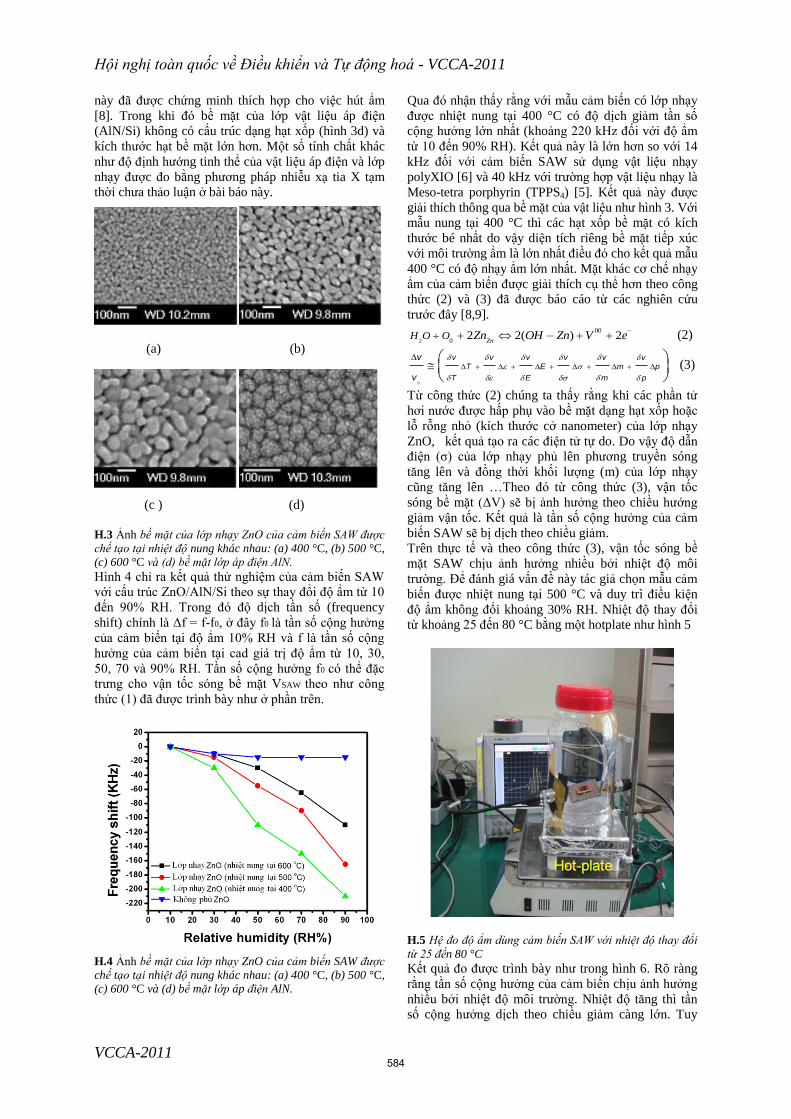
Trên thực tế và theo công thức (3), vận tốc sóng bề
mặt SAW chịu ảnh hưởng nhiều bởi nhiệt độ môi
trường. Để đánh giá vấn đề này tác giả chọn mẫu cảm
biến được nhiệt nung tại 500 °C và duy trì điều kiện
độ ẩm không đổi khoảng 30% RH. Nhiệt độ thay đổi
từ khoảng 25 đến 80 °C bằng một hotplate như hình 5
H.5 Hệ đo độ ẩm dùng cảm biến SAW với nhiệt độ thay đổi
từ 25 đến 80 °C Kết quả đo được trình bày như trong hình 6. Rõ ràng
rằng tần số cộng hưởng của cảm biến chịu ảnh hưởng
nhiều bởi nhiệt độ môi trường. Nhiệt độ tăng thì tần
số cộng hưởng dịch theo chiều giảm càng lớn. Tuy
584

Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011
VCCA-2011
nhiên trong khoảng nhiệt độ khảo sát, sự thay đổi của
tần số cộng hưởng theo nhiệt độ là tương đối tuyến
tính. Điều đó là cơ sở để xây dựng một thuật toán
phần mềm có chức năng loại trừ sai số do nhiệt độ
ảnh hưởng đến quá trình đo độ ẩm sử dụng cảm biến
SAW.
H.6 Ảnh hưởng của nhiệt độ đến tần số cộng hưởng của
cảm biến độ ẩm SAW được nhiệt nung 500 °C.
3. Kết luận Như vậy, theo xu thế phát triển các cảm biến mới dựa
trên công nghệ vật liệu nano và micro nhằm nâng cao
độ nhạy, tối ưu về kích thước để cải tiến cho các hệ
thống đo y sinh, hoá học hay môi trường. Tác giả đã
mạnh dạn tiếp cận, nghiên cứu loại cảm biến hoá học
sóng âm bề mặt mới (SAW). Thực tế cho thấy cớ chế
nhạy và hoạt động của cảm biến là tường đối phức
tạp. Trong bài báo này tác giả cố gắng chuyển tải một
cách gói gọn nhất có thể kết quả nghiên cứu của mình
thông qua nhiều nguồn tham khảo và thí nghiệm của
nhóm. Đồng thời qua đó phát triển một cảm biến đo
độ ẩm mới với cấu trúc ZnO/AlN/Si. Công việc được
tiến hành tại phòng thí nghiệm NFS thuộc trường đại
học Ulsan, Hàn Quốc kết hợp với kết quả thực
nghiệm tại phòng thí nghiệm đo lường, bộ môn Kỹ
thuật đo, Viện Điện, Trường Đại Học Bách Khoa Hà
Nội. Kết quả là cảm biến mới có sự cải thiện độ nhạy
đáng kể (220 kHz) so với một số cảm biến khác cùng
loại sử dụng polimer (bé hơn 40 kHz) làm lớp nhạy
ẩm. Sự ảnh hưởng của nhiệt độ đến quá trình làm việc
của cảm biến SAW cùng đã được khảo sát. Sự phụ
thuộc tuyến tính của độ dịch tần số cộng hưởng theo
nhiệt độ 25 đến 80 °C là cơ sở để loại trừ được sai số
theo nhiệt độ. Tuy nhiên, để hoàn thiện được nghiên
cứu, một số vấn đề quan trọng như độ lặp lại, độ trễ,
thời gian đáp ứng và độ tin cậy trong các chu kì thời
gian khác nhau phải được khảo sát kỹ hơn và công bố
trong những nghiên cứu tiếp theo.
Tài liệu tham khảo [1] Traversa, E.: Ceramic sensor for humidity
detection: the state-of-the-art and future
development, Sens. Actuators B 135-156, 1995
[2] Wang, X.H.; Ding, Y.F.; Zhang, J.; Zhu, Z.Q.;
You, S.Z.; Chen, S.Q.; Zhu, J.: Sens. Actuators
B, 421–427, 2006
[3] Wang, W.; Lee, K.; Kim, T.; Park, I.; Yang, S.:
A novel wireless, passive CO2 sensor
incorporating a surface acoustic wave reflective
delay line, Smart Mater. Struct. 16, 1382–1389,
2007
[4] Penza, M.; Vasanelli, L.: SAW NOx gas sensor
using WO3 thin-film sensitive coating, Sens.
Actuators B 41, 31–36, 1997
[5] Rimeika, R.; Ciplys, D; Poderys, V; Rotomskis,
R.; Balakauskas, S.; Shur, M.S.: Subsecond-
response SAW humidity sensor with porphyrin
nanostructure deposited on bare and metallised
piezoelectric substrate, Elect. Let. 43 1047–
1048, 2007
[6] Tashtoush, N.M; Cheeke, J.D.N.; Eddy, N.:
Surface acoustic wave humidity sensor based on
a thin PolyXIO film, Sens. Actuators B 49, 218–
225,1998
[7] Hoang, S.H; Chung, G.S.: Surface acoustic
wave characteristics of AlN thin films grown on
a polycrystalline 3C-SiC buffer layer,
Microelect. Eng. 86, 2149–2152, 2009
[8] Tai, W.P.; Oh, J.H.: Humidity sensing behaviors
of nanocrystalline Al-doped ZnO thin films
prepared by sol-gel process, J. Mater. Sci:
Mater. Elect. 13, 391–394, 2002
[9] Ricco, A.J; Martin, S.J: Thin metal film
characterization and chemical sensors:
monitoring electronic conductivity, mass
loading and mechanical properties with surface
acoustic wave devices, Thin Solid Films, vol.
206, pp. 94–101, 1991
Biography
Tác giả Hoàng Sĩ Hồng tốt
nghiệp đại học và thạc sĩ
chuyên nghành đo lường điều
khiển tại trường Đại Học
Bách Khoa Hà Nội
(ĐHBKHN) lần lượt vào năm
1999 và 2001. Năm 2010 tác
giả tốt nghiệp Tiến Sĩ tại
trường Đại Học Ulsan Hàn
Quốc. Từ 2002 đến nay là
giảng viên tại bộ môn Kỹ Thuật Đo và Tin Học Công
Nghiệp thuộc trường ĐHBKHN. Lĩnh vực nghiên cứu
chính hiện nay của tác giả là cảm biến môi trường và
hoá học, thiết bị đo thông minh và hệ thống SCADA,
DCS ứng dụng trong đo và kiểm tra môi trường.
Tác giả Trần Mạnh Hà tốt
nghiệp đại học chuyên
nghành đo lường điều khiển
tại Đại học Bách Khoa Hà
Nội (ĐHBKHN) vào năm
1999. Nay đang công tác tại
Vụ khoa học và công nghệ
Bộ công thương. Hiện tại anh
585

Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011
VCCA-2011
là học viên cao học chuyên ngành đo lường thuộc bộ
môn Kỹ thuật đo và tin học công nghiệp (KTĐ và
THCN), Viện Điện, ĐHBKHN. Lĩnh vực nghiên cứu
chính hiện nay của tác giả là cảm biến sóng bề mặt và
thiết bị đo lường thông minh.
Tác giả Trần Thị Thuỳ Dung tốt
nghiệp đại học chuyên nghành
đo lường điều khiển tại trường
Đại học Sư phạm kỹ thuật Hưng
Yên năm 2010. Nay đang là học
viên cao học chuyên ngành đo
lường thuộc bộ môn Kỹ thuật đo
và tin học công nghiệp (KTĐ và
THCN), Viện Điện, ĐHBKHN.
Lĩnh vực nghiên cứu chính hiện
nay của tác giả là cảm biến sóng bề mặt và các thiết bị
thông minh ứng dụng trong các hệ thống đo lường
điều khiển tự động dân dụng và công nghiệp.
586