Embed Size (px)
Citation preview
Chapter 4Chapter 4Lyapunov Stabilityy p y
The Invariance PrincipleThe Invariance PrincipleTime Varying Systems
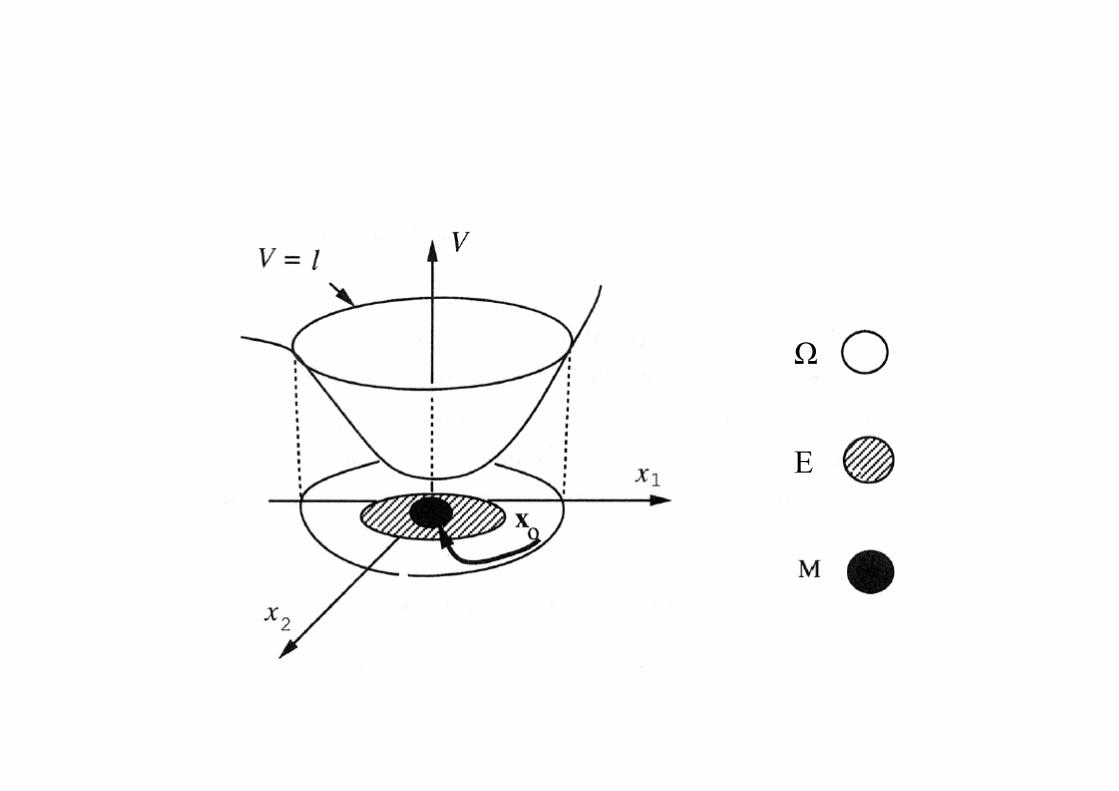
Ω
E
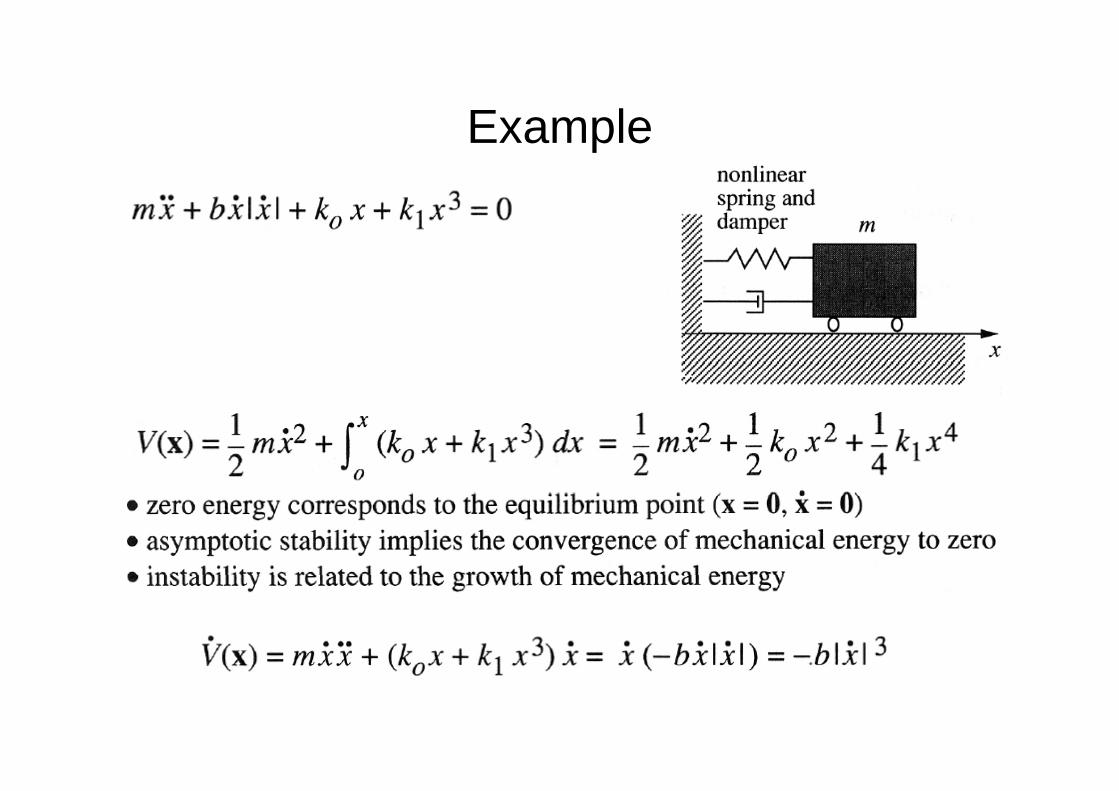
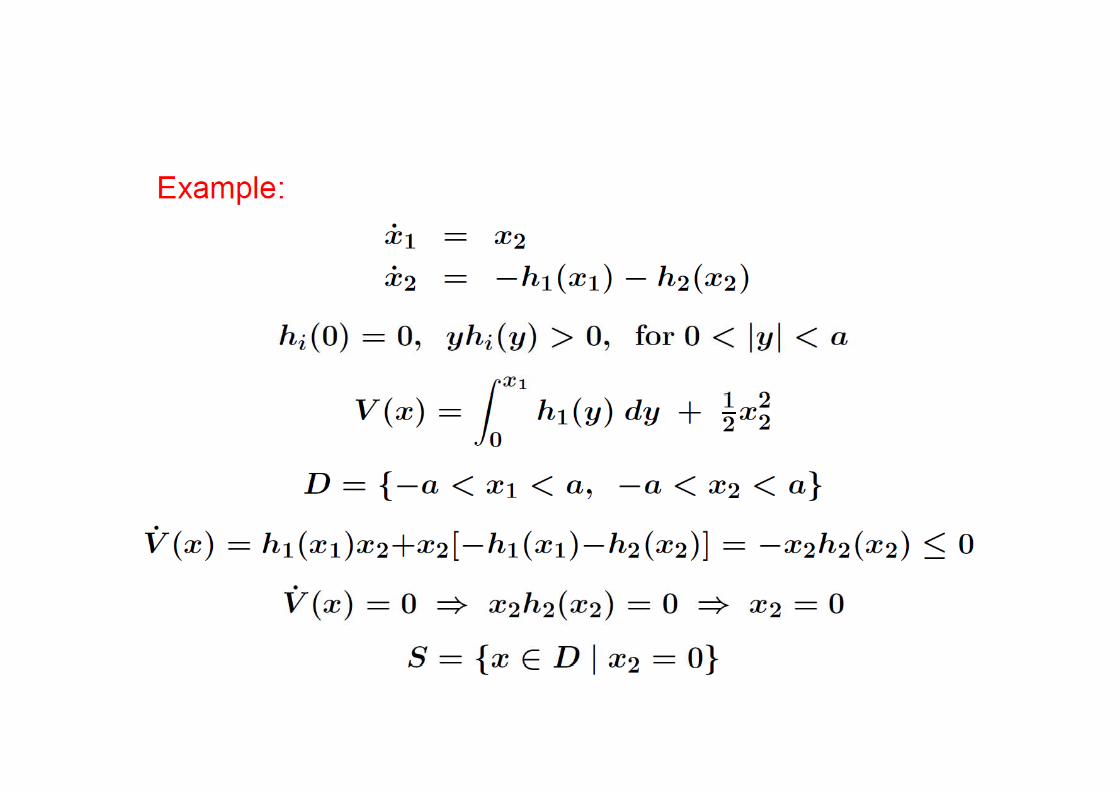
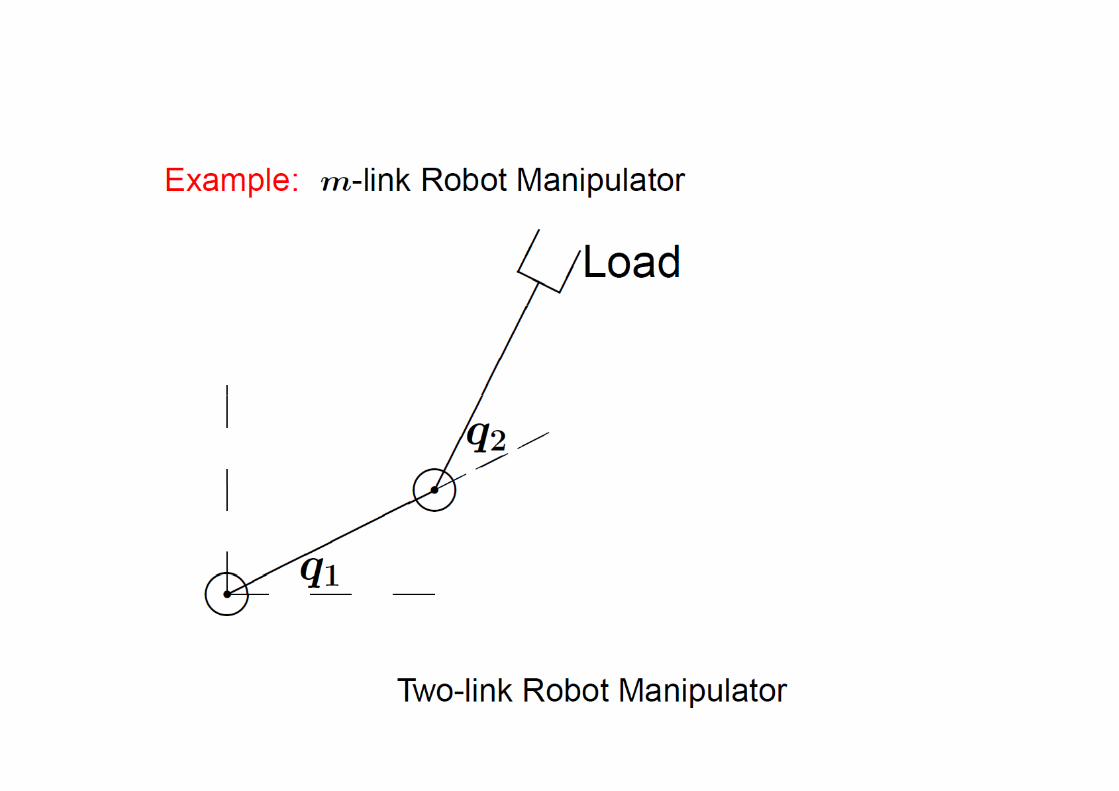
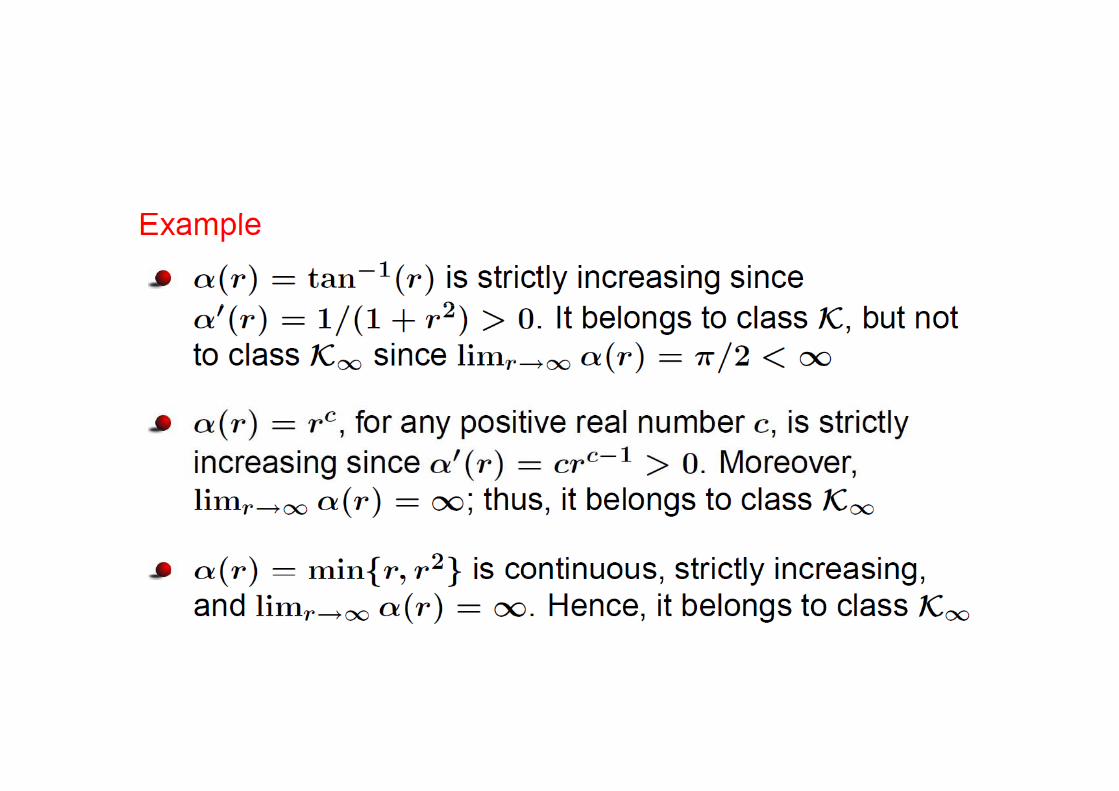
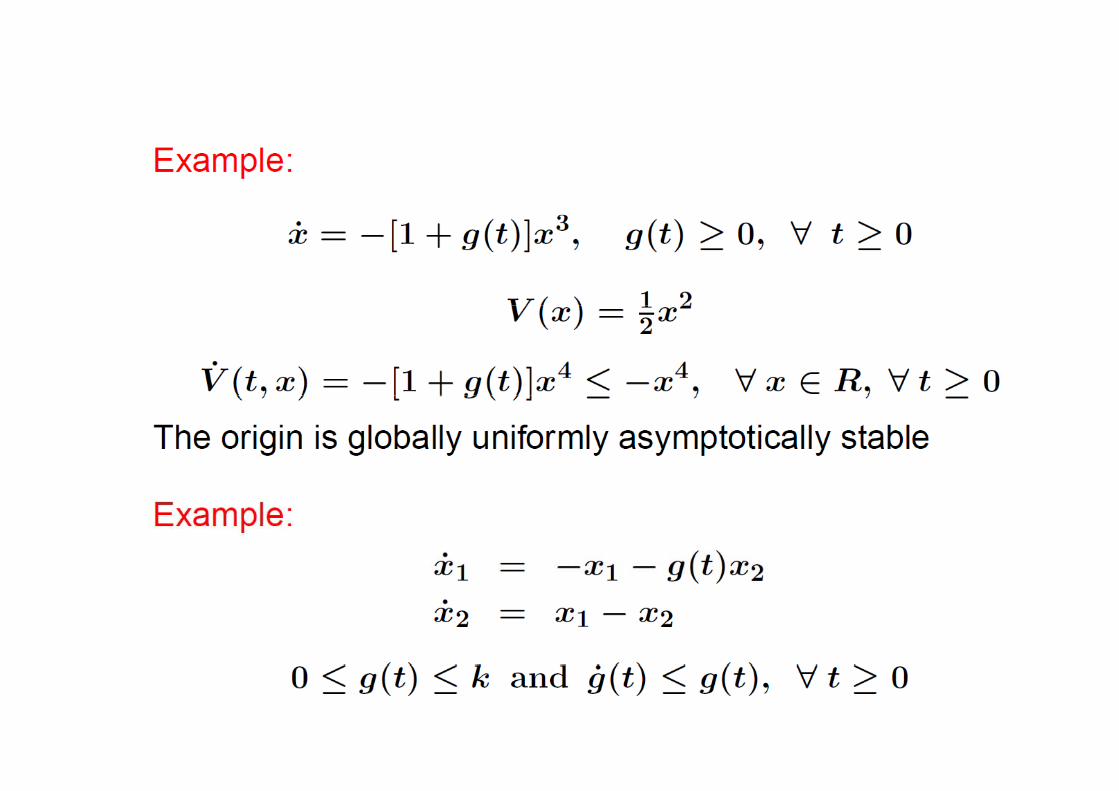
ExampleExample
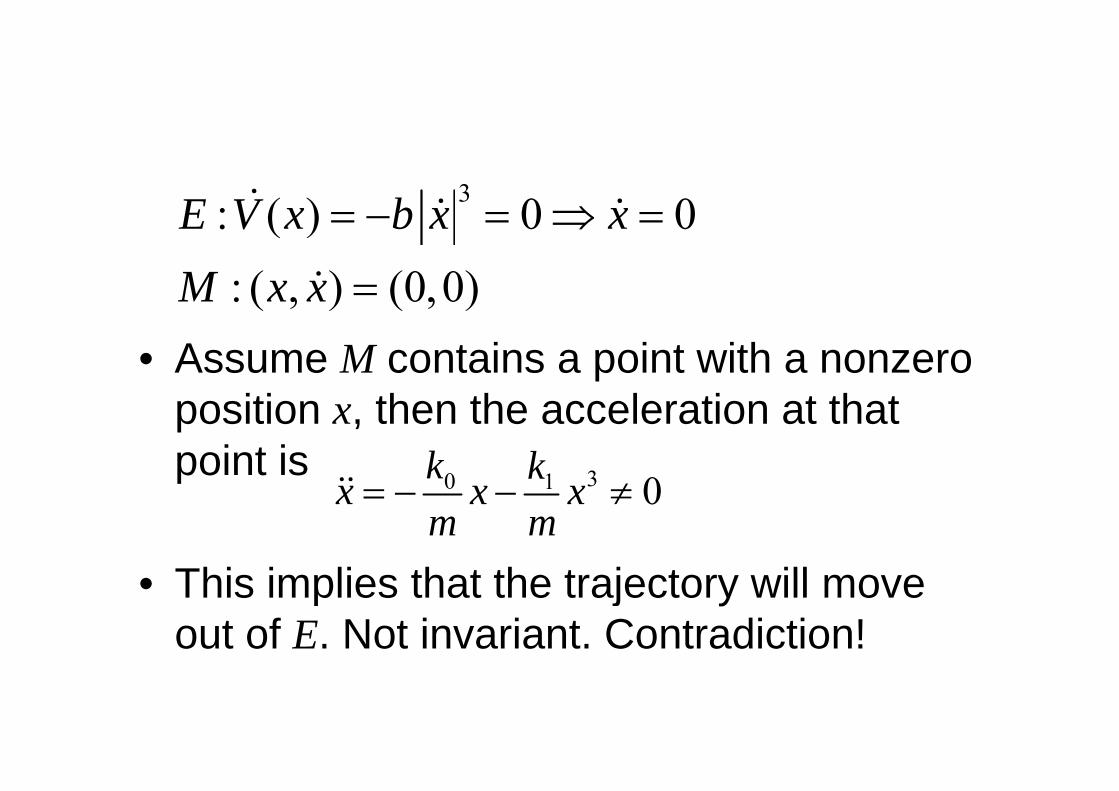
3: ( ) 0 0E V x b x x : ( ) 0 0: ( , ) (0,0)
E V x b x xM x x
• Assume M contains a point with a nonzero
iti th th l ti t th t
( , ) ( , )
position x, then the acceleration at that point is 30 1 0k k
This implies that the trajector ill mo e
30 1 0x x xm m
• This implies that the trajectory will move out of E. Not invariant. Contradiction!
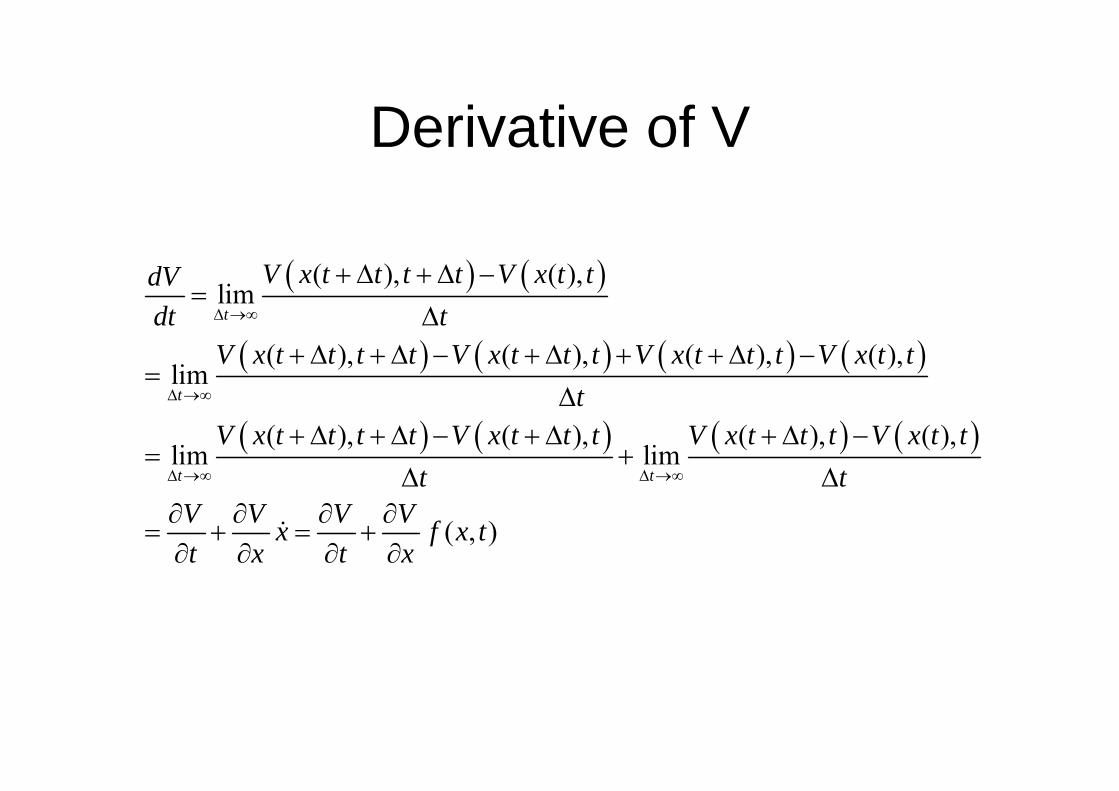
Derivative of VDerivative of V
( ), ( ),lim
V x t t t t V x t tdVd
( ), ( ), ( ), ( ),lim
t
t
dt tV x t t t t V x t t t V x t t t V x t t
t
( ), ( ), ( ), ( ),lim lim
t
t t
tV x t t t t V x t t t V x t t t V x t t
t t
( , )
t tV V V Vx f x tt x t x
![Chapter 10 Stability and Frequency Compensationocw.snu.ac.kr/sites/default/files/NOTE/3663.pdfMicrosoft PowerPoint - 10장_Stability and Frequency Compensation.ppt [호환 모드]](https://img.pdfslide.tips/doc/110x75/6109e71705ee483ef2171993/chapter-10-stability-and-frequency-microsoft-powerpoint-10stability-and-frequency.jpg)




























