Embed Size (px)
Citation preview

TRƯỜNG ĐẠI HỌC BÁCH KHOA HÀ NỘI
VIỆN ĐIỆNBỘ MÔN TỰ ĐỘNG HOÁ XNCN
====o0o====
ĐỒ ÁN TỐT NGHIỆPĐỀ TÀI:
TÌM HIỂU MÁY NẠP TỪ ZCY25-200 VÀ THIẾT KẾ ĐIỀU
KHIỂN DÙNG THIẾT BỊ CỦA MISUBISHI
Trưởng bộ môn : TS. Trần Trọng Minh
Giáo viên hướng dẫn : GV. Phạm Quốc Hải
Sinh viên thực hiện : Bùi Quang Tông
Lớp : C20.1 - K55
MSSV : C1020089
Hà nội, 6-2013

BỘ GIÁO DỤC VÀ ĐÀO TẠOTRƯỜNG ĐẠI HỌC BÁCH KHOA HN -------------------------------
CỘNG HÒA XÃ HỘI CHỦ NGHĨA VIỆT NAMĐộc lập – Tự do – Hạnh phúc
---------------------
NHIỆM VỤ
ĐỒ ÁN TỐT NGHIỆP
Họ và tên sinh viên: ............................................................Số hiệu sinh viên:.....................
Khóa ......................Khoa/Viện....................................Ngành................................................
1. Đầu đề thiết kế:
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
2. Các số liệu ban đầu:
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
3. Nội dung các phần thuyết minh và tính toán:
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................

4. Các bản vẽ, đồ thị ( ghi rõ các loại và kích thước bản vẽ ):
...............................................................................................................................................
...............................................................................................................................................
5. Họ tên cán bộ hướng dẫn:
...............................................................................................................................................
...............................................................................................................................................
6. Ngày giao nhiệm vụ đồ án:...............................................................................................
7. Ngày hoàn thành đồ án: ...................................................................................................
Ngày ....... tháng ....... năm ..….
Trưởng bộ môn( Ký, ghi rõ họ, tên)
Cán bộ hướng dẫn( Ký, ghi rõ họ, tên)
Sinh viên đã hoàn thành và nộp đồ án tốt nghiệp ngày…. tháng …. năm 2013
Người duyệt( Ký, ghi rõ họ, tên)
Sinh viên( Ký, ghi rõ họ, tên)

LỜI CAM ĐOAN
Em xin cam đoan bản đồ án tốt nghiệp: Tìm hiểu máy nạp từ ZCY25-200 và thiết kế điều khiển dùng thiết bị của Misubishi là do em tự thiết kế dưới sự hướng dẫn của thầy giáo GV. Phạm Quốc Hải. Các số liệu và kết quả là hoàn toàn đúng với thực tế.
Để hoàn thành đồ án này em chỉ sử dụng những tài liệu được ghi trong danh mục tài liệu tham khảo và không sao chép hay sử dụng bất kỳ tài liệu nào khác. Nếu phát hiện có sự sao chép em xin chịu hoàn toàn trách nhiệm.
Hà Nội, ngày 06 tháng 06 năm 2013
Sinh viên thực hiện
Bùi Quang Tông

MỤC LỤC

Danh mục hình vẽ
DANH MỤC HÌNH VẼ
Hình 3.1. Mô hình động học hệ thống trợ lái [5].......Lỗi! Thẻ đánh dấu không được xác định.
Hình 3.13. Góc lái đặt từ vô lăng.....................Lỗi! Thẻ đánh dấu không được xác định.

Lời nói đầu
LỜI NÓI ĐẦU
Hiện nay trong công cuộc công nghiệp hóa hiện đại hóa đất nước ta như hiện nay, nhu cầu cấp thiết về ứng dụng tự động hóa trong các quy trình sản xuất công nghiệp ngày càng cao. Đồng thời cũng do sự phát triển của công nghệ thông tin, công nghệ điện - điện tử đã cho ra đời dòng sản phẩm rất hữu dụng trong công nghiệp đó là thiết bị điều khiển khả trình PLC.
Để đáp ứng nhu cầu ngày càng cao của xã hội cũng như nâng cao hiệu quả kinh tế. Thì yêu cầu cấp bách đặt ra cho mỗi công ty và doanh nghiệp là phải nâng cao hệ thống, dây chuyền sản xuất để đem lại lợi ích cho chính doanh nghiệp - do đó dây chuyền sản xuất tự động dùng PLC chính là sự lựa chọn tốt nhất cho mỗi doanh nghiệp. Dây chuyền sản xuất tự động PLC giúp nâng cao hiệu quả sản xuất, giảm số lượng nhân công cũng như cho ra những sản phẩm đẹp với độ tinh xảo cao đồng thời cũng tiết kiệm được sức lao động cho nhân công. Chính do sự quan trọng của hệ thống tự động dùng PLC mà đề tài: Tìm hiểu máy nạp từ ZCY25-200 và thiết kế điều khiển dùng thiết bị của Misubishi do nhóm em thực hiện và giới thiệu sau đây sẽ phần nào làm rõ được công dụng do hệ thống tự động PLC mang lại. Dưới sự phân công và chỉ bảo tận tình của Thầy Phạm Quốc Hải đã giúp nhóm em được hiểu thêm những kiến thức mới và hoàn thành đề tài này.
Do những hiểu biết còn chưa được sâu xa cũng như kinh nghiệm còn nhiều hạn chế nên trong quá trình tìm hiểu và thực hiện đề tài cũng như nội dung đề tài còn những thiếu sót. Em rất mong nhận được sự chỉ bảo của thầy để đề tài này sẽ được hoàn thiện hơn.
Em xin chân thành cảm ơn!
Hà Nội, ngày 06 tháng 06 năm 2013
Sinh viên thực hiện
Bùi Quang Tông
1

Mục lục
LỜI NÓI ĐẦU....................................................................................................................iiDANH MỤC TỪ VIẾT TẮT...........................................................................................iiiLỜI NÓI ĐẦU....................................................................................................................1Chương 1............................................................................................................................2TỔNG QUAN VỀ MÁY NẠP TỪ ZCY25-200...............................................................2
1.1. Giới thiệu..................................................................................................................21.2. Thông số chính.........................................................................................................21.3 Cấu trúc và lắp đặt.....................................................................................................3
1.3.1 Cấu trúc cơ bản...................................................................................................31.3.2 Lắp đặt................................................................................................................6
1.4 Vận hành....................................................................................................................71.4.1 Chế độ vận hành bằng tay...................................................................................71.4.2 Chế độ tự động....................................................................................................7
1.5 Hiệu chỉnh máy.........................................................................................................81.5.1 Hiệu chỉnh hệ thống thủy lực..............................................................................81.5.2 Vận hành và hiệu chỉnh hệ thống điều khiển điện............................................10
1.6 Những điều cần chú ý..............................................................................................121.7 Các trường hợp khẩn cấp và cách xử lí..................................................................13
Chương 2.:TÌM HIỂU VÀ PHÂN TÍCH CHƯƠNG TRÌNH ĐIỀU KHIỂN PLC- CPM1A.............................................................................................................................14
2.1. Tìm hiểu PLC- CPM1A.........................................................................................142.2. Các lệnh cơ bản và phân công địa chỉ trong PLC – CPM1A được dùng trong máy nạp từ.............................................................................................................................152.3. Phân tích chương trình PLC điều kiện máy ZCY25-200.......................................18
2.3.1. Phân tích chương trình ở chế độ điều khiển tay..............................................182.3.2 Phân tích chương trình thực hiện chế độ tự động.............................................21
CHƯƠNG 3:TÌM HIỂU VÀ LẬP TRÌNH CHO BỘ ĐIỀU KHIỂN PLC VÀ MÀN HÌNH GOT-1000.............................................................................................................28
3.1 Tìm hiểu về PLC FX-3U.........................................................................................283.1.1 Các thông số cơ bản..........................................................................................283.1.2. Các lệnh cơ bản và phân công địa chỉ trong PLC FX-3U được dùng trong máy nạp từ.........................................................................................................................293.1.3 Bảng so sánh đầu vào đầu ra giữa PLC CPM1A và FX 3U.............................33
3.2 LẬP TRÌNH MÀN HÌNH ĐIỀU KHIỂN GOT-1000............................................34

Mục lục
3.2.1 Tổng quan về màn hình HMI vá cách kết nối với PLC....................................343.2.2 Giới thiệu màn hình GOT-1000.......................................................................363.2.3. Phần mềm lập trình cho GOT-1000.................................................................373.2.4. Lập trình màn hình GOT-1000........................................................................37
Chương 4: CHẠY THỬ CHƯƠNG TRÌNH TRÊN THIẾT BỊ CỦA MITSUBISHI TẠI PHÒNG THÍ NGHIỆM BỘ MÔN.........................................................................44
4.1 Nạp chương trình vào PLC.....................................................................................444.1.1 Nạp chương trình xuống màn hình HMI..........................................................444.1.2 Nạp chương trình vào PLC- FX3U...................................................................48
4.2 Chạy thử chương trình.............................................................................................50

Danh mục từ viết tắt
DANH MỤC TỪ VIẾT TẮT
PTT Pittong trên
PTD Pittong dưới
HMI Human Machine Interface Giao diện người và máy
PLC Programable Logic Control Bộ lập trình khả dụng
STL Statement List Dạng lập trình theo danh sách lệnh
LAD LADDER Dạng lập trình hình thang
CPU Control Programable Unit Bộ điều khiển trung tâm
PT Pittong

Chương 1: Tổng quan về máy nạp từ ZCY25-200
LỜI NÓI ĐẦU
Hiện nay trong công cuộc tộc hiện đại hóa đất nước ta hiện nay,nhu cầu cấp thiết về ứng dụng tự động hóa trong các quy trình sản xuất công nghiệp ngày càng cao. Đồng thời cũng do sự phát triển của công nghệ thông tin, công nghệ điện-điện tử đã cho ra đời dòng sản phẩm rất hữu dụng trong công nghiệp đó là thiết bị điều khiển khả trình PLC.
Để đáp ứng nhu cầu ngày càng cao của xã hội cũng như nâng cao hiệu quả kinh tế. Thì yêu cầu cấp bách đặt ra cho mỗi công ty và doanh nghiệp là phải nâng cao hệ thống, dây chuyền sản xuất để đem lại lợi ích cho chính doanh nghiệp-do đó dây chuyền sản xuất tự động PLC chính là sự lựa chọn tốt nhất cho mỗi doanh nghiệp. Dây chuyền sản xuất tự động PLC giúp nâng cao hiệu quả sản xuất, giảm số lượng nhân công cũng như cho ra sản phẩm đẹp với độ tinh xảo cao. Chính do sự quan trọng của PLC mà đề tài thiết kế hệ thống điều khiển bằng PLC cho máy nạp từ do nhóm em thực hiện và giới thiệu sau đây sẽ phần nào làm rõ được công dụng do hệ thống tự động PLC mang lại.Dưới sự phân công và chỉ bảo tận tình của Thầy Phạm Quốc Hải đã giúp nhóm em được hiểu thêm những kiến thức mới và để hoàn thành đề tài này.
Do những hiểu biết còn chưa được sâu xa cũng như kinh nghiệm còn nhiều hạn chế nên trong quá trình thực hiện đề tài cũng như nội dung đề tài còn những thiếu sót. Em rất mong nhận được sự chỉ bảo của thầy để đề tài này sẽ được hoàn thiện hơn.
Em xin chân thành cảm ơn!
Hà Nội, ngày 06 tháng 06 năm 2013
Sinh viên thực hiện
Bùi Quang Tông BỎ
1

Chương 1: Tổng quan về máy nạp từ ZCY25-200
Chương 1
TỔNG QUAN VỀ MÁY NẠP TỪ ZCY25-200
1.1. Giới thiệu
Hiện nay việc ứng dụng nam châm điện trong các thiết bị công nghiệp cũng như trong đời sống ngày càng gia tăng dẫn đến sự phát triển của các máy sản xuất nam châm. Công nghệ sản xuất và những thông số kĩ thuật cũng như mẫu mã ngày càng được hoàn thiện hơn. Máy ép nạp từ tự động ZCY25-200 là một trong những số đó, máy được thiết kế mới để có thể đáp ứng được yêu cầu của thị trường.
Thiết kế của máy ép nạp từ tự động ZCY25-200 dựa trên một số quy trình sản xuất mới theo yêu cầu của các thiết bị tương tự của năm 1990. Nó có chi phí thấp máy này được coi là một trong những máy tốt nhất được dùng trong vùng công suất ép nhỏ.
1.2. Thông số chính
Áp lực hoạt động cực đại: 250KN
Áp lực định mức của hệ thống thủy lực: 15MPa
Độ dịch chuyển của pittong thủy lực: ≥ 170mm
Đường kính của lõi sắt điện từ: 200mm
Đường kính hiệu quả của các cực nam châm điện: 150mm
Khoảng cách giữa hai cực từ: 0~160mm
Cường độ từ trường khi khoảng cách giữa hai cực từ 10mm: 2T
Công suất cực đại của nam châm điện: 15kW
Công suất định mức của động cơ : 5,5kW
Áp lực nước làm mát: 0,2MPa
Chiều cao máy: 2100mm
Diện tích sàn cho chân máy: 1600×2100
2

Chương 1: Tổng quan về máy nạp từ ZCY25-200
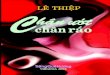
Hình 1.1. Hình dạng mặt trước máy nạp từ ZCY25-200
1.3 Cấu trúc và lắp đặt
1.3.1 Cấu trúc cơ bản
Máy ép bao gồm các bộ phận chính là thân máy ép, hệ thống thủy lực, nam châm điện và hệ thống điều khiển điện thể hiện ở (hình 1.2.)
a) Thân máy
3

Chương 1: Tổng quan về máy nạp từ ZCY25-200
Thân máy ép có cấu trúc khung bao gồm bệ máy, khung, pittong trên và pittong dưới. Hai pittong này có các thanh dẫn hướng cho di chuyển. Bầu dầu và hệ thống dẫn dầu.
Hình 1.2. Bố trí thiết bị của máy
b) Hệ thống thủy lực
Hệ thống thủy lực bao gồm bể chứa dầu, bơm thủy lực, các đường ống thủy lực với các đầu nối với hai pittong và van thủy lực được điều khiển bởi hệ thống điều khiển điện. Pittong dầu được điều khiển bởi hệ thống bơm thủy lực kép cho phép di chuyển hai pittong với hai tốc độ khác nhau.
c) Nam châm điện
Khung máy ép đóng vai trò là phần gá lắp cho nam châm điện. Hai cuộn dây được bố trí đối xứng nhau và khoảng cách của hai cực có thể điều chỉnh độc lập bằng hai vô lăng quay bằng tay và được làm mát bằng hệ thống nước làm mát tuần hoàn.
d) Hệ thống điều khiển điện
Hệ thống điều khiển điện bao gồm bộ điều khiển lập trình CPM1A, mạch chỉnh lưu cầu 3 pha, chế độ nạp-khử từ, bộ đảo chiều dòng điện nam châm cho chiều nạp từ và khử từ, mạch điều khiển động cơ điện máy bơm và các công tắc giới hạn hành trình là các
4

Chương 1: Tổng quan về máy nạp từ ZCY25-200
sensor cảm biến. Máy ép được điều khiển chung bởi hệ thống điều khiển lập trình PLC. Máy có hai chế độ là điều khiển bằng tay và điều khiển tự động để tùy chọn nhờ chuyển mạch trên bảng điều khiển.
Hình 1.3. Các phần tử vận hành máy trên mặt tủ điều khiển
5

Chương 1: Tổng quan về máy nạp từ ZCY25-200
Hình 1.4. Sơ đồ điện của máy
1.3.2 Lắp đặt
Thân máy được lắp đặt bằng cách cố định trên mặt sàn phẳng với bulong M20×400 tất cả thân máy đều được bố trí trên mặt sàn phẳng .
Hệ thống thủy lực và tủ điện điều khiển được đặt cùng một mức trên mặt sàn với thân máy ép. Các đường ống bơm của hệ thống thủy lực được kết nối theo bản vẽ như (hình 1.5.)
6

Chương 1: Tổng quan về máy nạp từ ZCY25-200
Hình 1.5. Hệ thống thủy lực của máy ZCY25-200
Hệ thống đi dây mạch điện cũng phải tuân theo bản vẽ sơ đồ điện (hình 1.4.).
1.4 Vận hành
Chương trình làm việc cho máy đã được nạp sẵn trong máy. Khi sử dụng chỉ cần chọn chế độ bằng tay hoặc chế độ tự động trên màn hình điều khiển cảm ứng và máy sẽ làm việc theo đúng chương trình đã lập trình sẵn này.
1.4.1 Chế độ vận hành bằng tay
Chế độ vận hành bằng tay thường được sử dụng để kiểm tra và hiệu chỉnh máy. Ở chế độ này người vận hành cần tuân thủ nghiêm ngặt quy định về lao động cũng như về an toàn lao động và quy trình sủ dụng máy khi trực tiếp điều khiển, hiệu chỉnh máy.
1.4.2 Chế độ tự động
a) Ép khuôn tự động hai phía
7

Chương 1: Tổng quan về máy nạp từ ZCY25-200
Đầu tiên cần nhấn nút tự động trên panel điều khiển để chuyển sang chế độ chạy máy tự động, sau đó nhấn nút Start trên panel điều khiển và máy sẽ chạy theo quy trình tự động như chương trình đã được lập trình sẵn theo trình tự như sau:
Pittong dưới đang ở cận trên sẽ di chuyển nhanh xuống dưới, đến sensor hạn chế PTD xuống khi này sẽ dần di chuyển đến vị trí đã định sẵn, sau đó sẽ đổ bột vào khuôn đến mức cần thiết. Sau đó nhấn nút Start một lần nữa thì PTT đang ở cận trên cùng sẽ di chuyển xuống dưới tới vị trí đã định sẵn bằng sensor hành trình và bắt đầu quá trình cấp dòng nạp từ. Quá trình ép và nạp từ sau khoảng thời gian nhất định sẽ tự động ngắt dòng nạp từ và chuyển sang quá trình ép giữ áp lực và cấp dòng khử từ. Kết thúc quá trình nạp-khử từ thì PTT sẽ di chuyển nhanh về vị trí cận trên ban đầu sau đó PTD cũng sẽ di chuyển lên trên đẩy khuôn lên.
Đến giai đoạn đẩy khuôn ra ngoài là kết thúc quá trình chạy tự động
b) Ép khuôn bằng tay một phía
Cho PTD xuống vị trí thấp nhất của nó bằng tay và sau đó ép chặt đầu khuôn. Hiệu chỉnh độ cao đệm dưới của khuôn. Chuyển công tắc trên panel điều khiển sang vị trí tự động. Nhấn công tắc hình nấm trên panel điều khiển. Cho bột vào khuôn bằng tay và ép mẫu bởi hai cực từ nam châm điện bằng vô lăng. Nhấn nút khởi động và máy sẽ làm việc theo trình tự sau:
PTT sẽ di chuyển xuống nhanh đến vị trí đã được định vị bằng công tắc hành trình dưới của PT này và bắt đầu cấp dòng nạp từ - quá trình vừa ép vừa nạp từ-ngắt dòng nạp từ và chuyển sang giai đoạn ép giữ lực nhưng cấp dòng khử từ sau đó PTT hồi nhanh về vị trí ban đầu.
Toàn bộ quá trình đã hoàn thành. Dùng tay làm lỏng một cực từ và đưa sản phẩm ra ngoài.
1.5 Hiệu chỉnh máy
1.5.1 Hiệu chỉnh hệ thống thủy lực
Bơm thủy lực kép chạy đặt thẳng đứng có nhiệm vụ cung cấp dầu thủy lực. Các van thủy lực áp lực kế được kết nối thành một khối hình thành trạm thủy lực. Trạm thủy lực nối với các xilanh dầu bằng các ống thép không gỉ liền mạch. Quá trình ép sẽ được thông qua hệ thống thủy lực kết hợp với hệ thống điều khiển điện.
8

Chương 1: Tổng quan về máy nạp từ ZCY25-200
Dầu thủy lực số 32 được sử dụng trong hệ thống thủy lực. Dầu cần phải bổ sung đầy đủ vào trong hệ thống thủy lực thông qua bộ lọc không khí để loại bỏ triệt để các tạp chất. Việc lọc dầu phải được thực hiện liên tục nhằm tránh ảnh hưởng tới hoạt động của các PT và các van thủy lực.
Cần loại bỏ không khí ra khỏi hệ thống thủy lực thông qua sự di chuyển tịnh tiến của khuôn được thực hiện liên tục để xả không khí ra ngoài.
Khi bắt đầu mỗi ngày làm việc cần khởi động động cơ bơm dầu để làm nóng động cơ trước khi chính thức vận hành máy.
Khi động cơ bơm dầu bắt đầu làm việc cần xoay hết bánh xe tay của van xả ngược chiều kim đồng hồ và mở công tắc của áp lực kế. Đẩy lõi của van xả từ bằng một tuốc-nơ-vít đầu dài và từ từ xoay bánh xe của van theo chiều kim đồng hồ, sau đó áp lực sẽ được hiển thị trên áp kế. Việc hiệu chỉnh các van từ khác cũng tương tự như mô tả ở trên và đặt áp lực dầu ở cùng một giá trị như nhau áp lực định mức của bơm là 14MPa.
Áp lực để ép nên điều chỉnh theo kích thước và khối lượng sản phẩm với một áp lực đặt trước là 3MPa.
Sau khi giá trị áp lực đã được chốt cố định, bánh xe tay của van được giữ chặt. Nếu khi thấy thiếu chính xác hoặc bằng không, thì cần phải hiệu chỉnh ngay. Dạng thực tế của trạm thủy lực
9

Chương 1: Tổng quan về máy nạp từ ZCY25-200
Hình 1.6. Trạm dầu thủy lực của máy nạp từ
1.5.2 Vận hành và hiệu chỉnh hệ thống điều khiển điện
Phần quan trọng nhất của hệ thống điều khiển điện chính là bộ điều khiển lập trình PLC dùng để điều khiển các van điện từ và điều chỉnh nguồn một chiều cấp nguồn cho các cuộn dây của nam châm điện. Cả chế độ bằng tay cũng như chế độ tự động cũng được giám sát bởi PLC.Và PLC mà chúng ta sử dụng là dòng CPM1A của hãng OMRON. Chương trình điều khiển được lập trình bằng giản đồ hình thang (LADER).
a) Quy trình sử dụng và trình tự mở máy
- Bật aptomat tổng.
- Bật aptomat của động cơ.
- Bật công tắc nguồn trên bảng điều khiển.
- Khởi động động cơ bằng nút nhấn tương tự.
b) Hiệu chỉnh dòng nạp từ và khử từ của nam châm điện
- Khởi động hệ ép.
- Chọn chế độ điều khiển bằng tay trên panel điều khiển.
10

Chương 1: Tổng quan về máy nạp từ ZCY25-200
- Kẹp một chi tiết phi từ tính giữa hai cực từ.
- Xoay chiết áp đặt dòng nạp từ và khử từ về mức điểm không .
- Nhấn và giữ nút nạp từ liên tục và đồng thời điều chỉnh chiết áp nạp từ tăng lên dần và theo dõi giá trị của dòng điện trên đồng hồ. Khi tới giá trị 50A thì dòng đã đạt mức cường độ lớn nhất cho máy.
- Sau khi kết thúc quá trình hiệu chỉnh dòng nạp từ thì ta chuyển sang quá trình hiệu chỉnh dòng khử từ cũng với những thao tác tương tự, nhưng với dòng khử từ khoảng 5V. Trị số dòng khử từ có thể đảm bảo quá trình khử từ đầy đủ là từ (1-20A).
- Kết thúc quá trình hiệu chỉnh dòng nạp, khử thì không nên thay đổi các giá trị đã cài đặt trước.
c) Hiệu chỉnh công tắc hành trình và vị trí tác động của công tắc
- Khởi động hệ ép.
- Chọn chế độ điều khiển bằng tay.
- Đầu cảm biến của sensor vị trí cần được giữ khoảng cách với phần di chuyển của PT để không gây va chạm khi pittong hoạt động.
- Cố định vị trí của khuôn.
- Di chuyển mỗi PT thủy lực đến vị trí cần thiết của nó dịch chuyển các đầu cảm biến của sensor vị trí đến gần phần tiệm cận khoảng (2-4mm) sau đó chốt chặt các ốc chốt đầu cảm biến.
- Khi các quá trình hiệu chỉnh trên kết thúc, di chuyển PT để đảm bảo tất cả các sensor đều hoạt động tốt. Khi PT di chuyển đến ngang vị trí sensor thì sẽ có ánh sáng màu đỏ từ đầu cảm biến phát ra.
d) Công việc cần chuẩn bị trước khi làm việc.
- Khởi động hệ ép.
- Chọn chế độ điều khiển bằng tay.
- Kiểm tra các chiết áp để xem có sự thay đổi nào không.
- Kiểm tra mọi chuyển động của máy bằng cách chạy thử để kiểm tra các công tắc hành trình xem có hoạt động tốt không.
- Sau đó nhấn chạy tự động trên panel điều khiển và bắt đầu quá trình làm việc.
11

Chương 1: Tổng quan về máy nạp từ ZCY25-200
e) Các thứ tự dừng máy trong trường hợp khẩn cấp
- Nhấn nút Dừng khẩn cấp màu đỏ trên màn hình điều khiển để đừng máy.
- Tắt động cơ bơm dầu.
- Sau 5 giây thì tắt nguồn điều khiển.
- Ngắt aptomat tổng.
f) Dừng máy trong điều kiện bình thường
- Tắt động cơ bơm dầu.
- Ngắt aptomat tổng.
1.6 Những điều cần chú ý
1. Cáp nguồn có tiết diện dây không được nhỏ hơn 10mm².
2. Đường dây dẫn điện xoay chiều và một chiều không được chung đường dây. Quy tắc này cũng được áp dụng cho những đường dây có dòng điện lớn và dòng điện nhỏ.
3. Dầu máy 32 được sử dụng như dầu thủy lực nên có thể cho thông với dây lọc trên vỏ của bể chứa dầu. Yêu cầu cần phải thường xuyên làm sạch thùng dầu và bộ phận lọc dầu.
4. Sau khi các yêu cầu đã được thỏa mãn, thì nên giảm áp lực xuống mức thấp nhất có thể.
5. Khi hiệu chỉnh quá trình nạp từ và khử từ ta cần vật phi từ tính giữa hai cực.
6. Hiệu chỉnh dòng nạp khử từ phải chính xác.
7. Dòng nạp từ không được vượt quá 50A và dòng khử từ không được vượt quá 20A.
8. Không có giá trị chuẩn mực cho giá trị dòng khử từ,vì vậy dòng khử từ sẽ được điều chỉnh đến mức hợp lí khi khuôn hoàn toàn được khử từ.
9. Không được phép tự ý điều chỉnh dòng nạp từ khi đã hiệu chỉnh máy định mức.
10. Nước làm mát cần được chạy tuần hoàn trước khi khởi động hệ ép.Không được tự ý ngắt dòng nước khi máy đang hoạt động.
12

Chương 1: Tổng quan về máy nạp từ ZCY25-200
11. Trước khi khởi động máy ở chế độ tự động thì cần kiểm tra các thông số có liên quan tới hoạt động của máy.
12. Thành trong của khuôn cần được bọc chất chống dính.
13. Sau khi cố định khuôn cần phải khóa chặt volang.
14. Chỉ có người có phận sự mới được phép vận hành máy cũng như hiệu chỉnh.
15. Không được tự ý ngắt nguồn điện khi máy đang hoạt động.
16. Chỉ nên chọn dừng khẩn cấp khi cần thiết.
17. Bột còn dư sau quá trình sản xuất cần được dọn sạch sẽ khi máy không làm việc.
1.7 Các trường hợp khẩn cấp và cách xử lí
1. Khi phát hiện các lỗi liên quan tới sự làm việc chính xác của máy thì cần kiểm tra kỹ là hệ thống điện điều khiển hay là do lỗi của hệ thống bơm …Khi đã phát hiện lỗi ở bộ phận nào cần phải có phương án xử lí cụ thể và khoa học.
2. Trong chế độ chạy tự động máy có hoạt động không bình thường thì nên kiểm tra vị trí và trạng thái của các sensor.
3. Hệ thống dây dẫn cần phải được đảm bảo an toàn dẫn điện cũng như cách điện và được đi dây gọn gàng và ổn định.
4. Các phần cố định như các bulong cần được kiểm tra cẩn thận tránh lỏng lẻo.
5. Các cuộn dây của nam châm bị nóng quá cách đột ngột thì nên kiểm tra đường nước làm mát tuần hoàn cũng như áp suất của dòng nước làm mát.
6. Các lỗi liên quan tới hệ thống bơm dầu:
- Mức dầu phải được đảm bảo ở mức 1/3 thùng hoặc có thể đầy thùng tránh thiếu dầu làm mát máy.
- Bộ lưới lọc dầu cần phải được làm sạch đảm bảo sự thông suốt cho dầu chảy qua.
- Van thủy lực cũng phải cần được đảm bảo là không bị hở và hoạt động tốt.
- Nếu áp lực dầu của hệ thống thủy lực giảm xuống đột ngột và không thể tang lên lại, có thể do rò rỉ ở cửa vào hoặc cửa ra ống dầu của bơm. Mở nắp bể chứa dầu ra kiểm tra cẩn thận.
13

Chương 2: Tìm hiểu và phân tích chương trình điều khiển PLC-CPM1A
Chương 2
TÌM HIỂU VÀ PHÂN TÍCH CHƯƠNG TRÌNH ĐIỀU KHIỂN PLC- CPM1A
2.1. Tìm hiểu PLC- CPM1A
PLC – CPM1A thuộc họ OMRON do Nhật Bản sản xuất. Đây là loại PLC đơn khối có thể tháo lắp ghép thêm các module và lắp ghép nhiều PLC với nhau , loại này có 30 đầu vào/ra: 18 Input, 12 Output, máy sẽ được làm việc với những đầu vào và đầu ra tương ứng . Đơn vị đơn giản của PLC – CPM1A như hình :
Hình 2.1. PLC-CPM1A
14

Chương 2: Tìm hiểu và phân tích chương trình điều khiển PLC-CPM1A
Trong đó :
Các đèn báo hệ thống.+) Đèn PWR (xanh): báo nguồn.
+) Đèn RUN (xanh): PLC đang ở chế độ chạy hoặc kiểm tra, (đèn tắt thì PLC đang ở chế độ lập trình hoặc có lỗi).
+) Đèn ER/ALM (đỏ):
Sáng: Có lỗi hoặc PLC không hoạt động.
Nhấp nháy hoặc tắt: PLC đang hoạt động.
+) Đèn COMM (da cam): Dữ liệu đang truyền đến cổng ngoại vi.
Cổng ghép nối với máy tính hoặc thiết bị lập trình (có nắp đậy). Các đèn chỉ thị và địa chỉ ra (sáng nếu có tín hiệu ra). Chân nối cho đầu ra (có nắp đậy). Các đèn chỉ thị và địa chỉ vào (sáng nếu có tín hiệu ra). Chân nối cho đầu vào ( có nắp đậy).
2.2. Các lệnh cơ bản và phân công địa chỉ trong PLC – CPM1A được dùng trong máy nạp từ
Bảng 2.1. Các lệnh cơ bản được dùng trong máy nạp từ
Stt Tên lệnh Chức năng1 AND Nhân logic trạng thái của bit xác định với điều kiện thực hiện2 AND LD Nhân logic với các kết quả của khối xác định3 AND NOT Nhân logic giá trị đảo bit xác định với điều kiện thực hiện4 LD Khởi động một dãy lệnh với trạng thái của bit xác định hoặc định
nghĩa 1 khối logic được dùng với ANDLD hoặc ORLD5 LD NOT Khởi động 1 dãy lệnh với nghịch đảo của bit xác định6 OR Cộng logic trạng thái của bit xác định với điều kiện thực hiện7 OR LD Cộng các kết quả của các khối định trước8 OR NOT Cộng logic nghịch đảo bit xác định với điều kiện thực hiện9 TIM Thời gian trễ ON10 CNT Đếm lùi11 OUT Đưa ra cổng ra giá trị của bit thực hiện
15

Chương 2: Tìm hiểu và phân tích chương trình điều khiển PLC-CPM1A
12 IL (02) Nếu điều kiện khóa chéo là OFF tất cả các đầu ra là OFF và toàn bộ thời gian sẽ phục hồi giữa IL (02) và IL(03) . Các lệnh khác được điều hành như lệnh NOP, bộ đếm vẫn duy trì
13 IL(03) Kết thúc đoạn chương trình bắt đầu bằng lệnh IL (02)14 END Lệnh kết thúc chương trình
Bảng 2.2. Phân công địa chỉ và chứ năng các cổng vào PLC.
Stt Địa chỉ Ký hiệu Chức năng Chú thích1 000.00 X0 Chọn chế độ tay/ tự động OFF: tay; ON: Auto
2 000.01 X1 Nút ấn điều khiển PTT đi lên Chế độ tay
3 000.02 X2 Nút ấn điều khiển PTT đi xuống Chế độ tay
4 000.03 X3 Nút ấn chạy nhanh Chế độ tay
5 000.04 X4 Nút ấn điều khiển PTD đi lên Chế độ tay
6 000.05 X5 Nút ấn điều khiển PTD đi xuống Chế độ tay
7 000.06 X6 Nút ấn “Start” chế độ Auto Khởi động chu trình tự động
8 000.07 X7 Nút ấn “Nạp từ” Chế độ tay
9 000.08 X8 Nút ấn “Khử từ” Chế độ tay
10 000.09 X9 Dừng khẩn cấp Emergency Stop
11 000.10 - Đầu vào có ở phần chương trình Auto Không có ở sơ đồ đi dây
12 000.11 - -
13 001.00 -
14 001.01 X10 Công tắc hạn chế PTT đi lên
15 001.02 X11 Công tắc định vị trí PTT đi xuống Chỉ có dùng ở chế độ “Auto”
16 001.03 X12 Công tắc hạn chế PTD đi lên
17 001.04 X13 Công tắc hạn chế PTD đi xuống
16

Chương 2: Tìm hiểu và phân tích chương trình điều khiển PLC-CPM1A
18 001.05 -
Bảng 2.3. Phân công địa chỉ các cổng ra của PLC.
Stt Địa chỉ Ký hiệu
Chức năng Chú thích
1 010.00 Y00 Đầu ra chỉ ở phần chương trình Auto Liên quan đến Counter ?
2 010.01 Z18 Tác động khi các CTT nạp hoặc khử từ đóng
Nối Uđk xuống đất (Uđk=0)
3 010.02 Ye Nối tới điểm giữa của triết áp khử từ (trên cửa tủ)
Uđặt khử từ (010.02)
4 010.03 Y2 Nối với điểm giữa của triết áp nạp từ (trên cửa tủ)
Uđặt nạp từ (010.03)
5 010.04 J1 CTT đóng cho chiều nạp từ
6 010.05 J2 CTT đóng cho chiều khử từ Đảo chiều đầu ra chỉnh lưu
7 010.06 J3 CTT đóng cho PTT đi lên Đóng van thủy lực
8 010.07 J4 CTT đóng cho PTT đi xuống Đóng van thủy lực
9 011.00 J5 CTT đóng cho PTD lên Đóng van thủy lực
10 011.01 J6 CTT đóng cho PTD xuống Đóng van thủy lực
11 011.02 J7 Luôn tác động đồng thời với tất cả (J3-J6)
Chỉ tác động ở hệ thủy lực
12 011.03 J8 Chạy nhanh – Fast Speed Chỉ tác động ở hệ thủy lực
13 COM0 YCOM Sử dụng với Y00 (không rõ chức năng) -
14 COM1 Z12 Nối với 0V điều khiển (nối đất Z18 khi tác động)
Làm Uđk=0 để ngắt dòng Id
15 COM2 Z30 Nối để cấp đặt dòng nạp từ hoặc khử từ tới đk
Cấp Uđặt cho đk chỉnh lưu
17

Chương 2: Tìm hiểu và phân tích chương trình điều khiển PLC-CPM1A
16 COM3,4 +24V Nối với cực (+) của nguồn 24VDC Làm nguồn cho các rơle đk
2.3. Phân tích chương trình PLC điều kiện máy ZCY25-200
CPM1A sử dụng 2 phương pháp lập trình là theo danh sách lệnh STL (Statement List ) và lập trình dạng thanh LADDER.
Phương pháp lập trình STL là phương pháp soạn thảo chương trình dạng tập hợp các câu lệnh người dùng phải nhập các câu lệnh từ bàn phím giữa lệnh và toán hạng (toán hạng là địa chỉ, dữ liệu) có khoảng trắng và mỗi lệnh chiếm 1 hàng.
Phương pháp lập trình dạng thang LADDER là phương pháp có dạng biểu đồ của nút bấm. Mạng LAD là đường nối của các phần tử thành 1 mạch hoàn chỉnh theo thứ tự từ trái sang phải, từ trên xuống. Quá trình quét của PLC cũng theo thứ tự này. Mỗi nấc thang xác định 1 số hoạt động của quá trình điều khiển. Mỗi một LADDER có nhiều nấc thang tương ứng là các lệnh.
Hoạt động của máy nạp từ ở cả 2 chế độ tự động/ tay đều thực hiện thông qua bộ điều khiển logic khả trình CPM1A, chỉ riêng động cơ điện phục vụ bơm dầu áp lực cho hệ thủy lực là chạy độc lập không cần thông qua PLC.
2.3.1. Phân tích chương trình ở chế độ điều khiển tay
a) Các sensor vị trí.
Các PTT và PTD được điều khiển bằng các nút ấn tương ứng và có các công tắc hạn chế hành trình di chuyển, nhưng trong chương trình điều khiển chỉ dùng 03 công tắc :
Hạn chế PTT đi lên, X10 => 001.01 (địa chỉ PLC);
Hạn chế PTD đi lên, X12 => 001.03 (địa chỉ PLC);
Hạn chế PTD đi xuống, X13 => 001.04 (địa chỉ PLC);
Như vậy ở chế độ tay không dùng công tắc hạn chế hành trình đi xuống của PTT (X11 => 001.02). Tuy nhiên như phần chương trình điều khiển tự động (chế độ Auto) sẽ thấy đầu vào X11=>001.02 được dùng với chức năng: dừng PTT đi xuống ở vị trí định sẵn và phát lệnh “nạp từ” (sau đó PTT còn tiếp tục đi xuống để thực hiện việc ép đồng thời với nạp từ).
b)Chế độ nạp từ
18

Chương 2: Tìm hiểu và phân tích chương trình điều khiển PLC-CPM1A
Ấn nút “nạp từ” và giữ, nếu CTT khử từ vừa nhả thì phải chờ 0,5 giây (đặt ở TIM05), còn khi CTT khử từ đã nhả quá 0,5s thì lập tức:
TIM20 tác động bắt đầu đếm thời gian, khi đủ thời gian (t TIM20=0s??) sẽ tác động dẫn đến:
rơle J1 (010.04) tác động => đóng điện cho CTT CJ1 để nối đường điện áp chỉnh lưu với cuộn dây tạo từ trường bằng dây cáp theo chiều nạp từ.
khởi động TIM21. Khi TIM21 đủ thời gian (tTIM21=0,5s) và tác động sẽ bật đầu ra 010.03=1 làm điểm
giữa của triết áp đặt dòng nạp từ Yj nối với điểm Z30 đưa vào panel điều khiển. Mạch chỉnh lưu hoạt động tương ứng với lượng điện áp đặt bởi triết áp nạp từ này (triết áp nằm trên mặt tủ điều khiển) và đưa ra điện áp một chiều dẫn đến xuất hiện dòng điện một chiều tạo từ trường nạp.
+ Nhả nút ấn nạp từ, TIM20 lập tức bị ngắt, dẫn đến:
TIM21 ngắt theo ngay => ngắt luôn đầu ra 010.03=0 nhả điểm giữa triết áp chỉnh dòng nạp từ Yj khỏi điểm Z30, tức là ngắt lượng đặt của điều khiển chỉnh lưu.
Bật đầu ra 010.01=1 làm điểm Z18 nối với Z12 của panel điều khiển. Z12 là điểm “nối đất” của điều khiển, còn Z18 được nối với điểm tương ứng Uđk của chỉnh lưu. Như vậy khi nối Z18 với Z12 có nghĩa là tác động làm cho Uđk=0 dẫn đến Ud=0 và Id=0, tức là ngắt dòng nạp từ.
Khởi động TIM06, khi đủ thời gian (t TIM21=3s) thì: Tắt đầu ra 010.04 => ngắt CTT nạp từ. Tắt đầu ra 010.01=0 làm ngắt điểm Z18 khỏi điểm Z12. Do đó hai điểm Z18 và
Z12 chỉ được nối với nhau trong thời gian t=tTIM06 sau khi nhả nút ấn “nạp từ”.Như vậy có thể thấy rằng CTT “nạp từ” luôn được đóng hoặc ngắt khi không có
dòng điện một chiều qua nó, đây là biện pháp đảm bảo không có hồ quang xuất hiện khi đóng/ngắt mạch một chiều. Do đó có thể dùng CTT xoay chiều vào vị trí của CTT một chiều là việc được ứng dụng cho mạch lực của máy này (nếu đóng/ngắt mạch một chiều khi có dòng đi qua CTT thì hồ quang điện một chiều sẽ rất mạnh dẫn đến nếu sử dụng CTT chiều phải tăng khả năng chịu dòng của tiếp điểm lên nhiều lần so với trị số định mức).
+) Lưu ý:
Khi nút “nạp từ” chỉ được ấn rồi nhả ngay trong thời gian nhỏ hơn tTIM21 thì đầu 010.03 sẽ không tác động được và do đó sẽ không có điện áp đặt dòng đưa vào panel điều
19

Chương 2: Tìm hiểu và phân tích chương trình điều khiển PLC-CPM1A
khiển nên sẽ không có điện áp một chiều. Lúc đó chỉ dẫn đến một tác động là CTT CJ1 đóng.
Hình 2.2. Lưu đồ điều khiển tay chế độ nạp từ
c)Chế độ khử từ.
Quá trình xảy ra hoàn toàn tương tự như nạp từ với các bộ thời gian khác:
T04 tương đương T05 (khóa chéo), t TIM05 = t TIM04=0,5s. T10 tương đương T20 (trễ đóng CTT khử từ CJe), tTIM10 = tTIM20=0s. T11 tương đương T21 (trễ cấp điện áp từ triết áp đặt dòng khử từ đến điểm Z30),
nhưng tTIM11 =0,3s (< tTIM21=0,5s). T16 tương đương T06 (trễ ngắt CTT CJe và nối/cắt hai điểm Z18-Z12), tuy nhiên
tTIM16=2,5s (< tTIM06=3s).
20

Chương 2: Tìm hiểu và phân tích chương trình điều khiển PLC-CPM1A
Và cũng có hai kiểu phản ứng tùy theo nút “khử từ” ấn nhanh hay giữ lâu tương tự như nút “nạp từ”.
Hình 2.3. Lưu đồ điều khiển tay chế độ khử từ.
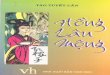
2.3.2 Phân tích chương trình thực hiện chế độ tự động
Chế độ này hoạt động theo phần chương trình riêng nằm trong khu vực đánh dấu bằng hai lệnh IL(02) và ILC(03) - (Interlock và Interlock Clear).
Vị trí ban đầu của hai PT ở chế độ tự động phải là:
- PTT ở vị trí cao để công tắc hành trình trên bị nhấn 001.01=1. - PTD ở vị trí cao để công tắc hành trình trên bị nhấn 001.04=1.
Ấn nút “Start” và bắt đầu quá trình hoạt động theo chương trình PLC như sau:
Keep 500=ON- Reset Keep 509
+ TIM100 bắt đầu chạy, sau t=tTIM100=0,5s thì ngắt cửa set của Keep 500;
21

Chương 2: Tìm hiểu và phân tích chương trình điều khiển PLC-CPM1A
+ 011.01=ON => J6=1 => PTD đi xuống đến khi công tắc hạn chế hành trình xuống tác động làm 001.04=ON sẽ làm ngắt 011.01=OFF => J6=0 => PTD dừng.
Keep 501=ON do được Set: keep 500 (ON) – 011.01(OFF) – 001.04 (ON). Lúc đó:
- Reset Keep 500=OFF.Đến đây hệ thống ở trạng thái chờ để người vận hành đổ bột từ tính vào khuôn
trên máy như mô tả ở hướng dẫn vận hành. Sau khi đã đổ bột, người vận hành đặt nắp khuôn lên khuôn và phải ấn nút “Start”một lần nữa để hệ thống tiếp tục hoạt động.
Nhấn nút Start => 000.06=ON thì đường được Set502=1: 501(ON) – TIM100(OFF) – Start(ON) nên Keep 502=ON
- Reset Keep 501=OFF+ Keep 502 bật trực tiếp đầu ra 011.03 (J8) cho phép di chuyển nhanh các
PT
+ 010.07=ON => J3=1 => PTT đi xuống nhanh (do J8=1) cho đến khi công tắc hạn chế định vị xuống tác động => 001.02=ON làm ngắt 011.07=OFF => J6=0 => PTT dừng lại ở vị trí thấp.
Keep 503=ON do được Set: keep 502 (ON) – 001.02.- Reset Keep 502=OFF; nhả đầu ra 011.03 =>J8=0 (ngắt chạy nhanh). - Ra lệnh bắt đầu quá trình nạp từ: tiếp điểm của Keep 503 đấu song song với nút ấn
“nạp từ” của chế độ tay, do đó quá trình nạp từ tiếp tục như ở chế độ tay: sau 0,5 giây thì CTT nạp từ đóng, sau tiếp 0,5 giây nữa thì cấp điện áp đặt cho chỉnh lưu.
- Run TIM101 với thời gian đặt tTIM101=3,3sNhư vậy khi PTT dừng lại ở vị trí chuẩn bị ép được 1 giây thì đã bắt đầu có từ
trường theo chiều nạp từ (chưa có ép khuôn). Đây là giai đoạn được gọi là “premagnetizing”.
Keep 504=ON khi TIM101(3,3s)=ON do được Set: Keep 503(ON) – TIM101(ON) (sau 2,3 giây khi bắt đầu xuất hiện dòng điện nạp từ)
- 011.00=ON làm PTD di chuyển lên đẩy đáy khuôn từ dưới để ép từ dưới lên.
+ Keep 511=ON làm cho:
+ 010.07=ON => J3=1 => PTT lại tiếp tục di chuyển xuống ấn vào nắp khuôn và đẩy nắp khuôn đi xuống để thực hiện ép từ trên xuống.
Đây là giai đoạn vừa ép vừa nạp từ gọi là giai đoạn “magnetizing and pressing”.
- TIM 102 bắt đầu chạy với thời gian đặt tTIM102=0,1s khi tác động sẽ nhả đường Set của Keep 511
22

Chương 2: Tìm hiểu và phân tích chương trình điều khiển PLC-CPM1A
- Run TIM110 với tTIM110=0s để khi tác động thì bật 010.00=ON nối hai đầu Yoo với Ycom (Không dùng đầu ra này),
- Run TIM103 với tTIM103=0,5s khi tác động sẽ ngắt TIM110=OFF dẫn đến 010.00=OFF. Như vậy đầu ra 010.00 chỉ đóng trong thời gian ngắn tYoo= tTIM103 - tTIM110 =0,5s. (Dự đoán Yoo là đường tác động tới bộ Counter trên mặt tủ: nếu đưa tới cổng CNT thì để đếm lần nạp từ -đếm sản phẩm- nhưng cũng có thể đưa tới đầu Reset để xóa bộ đếm)
- Run TIM108 với thời gian đặt tTIM108=3,2s Keep 505=ON sau 3,2s khi TIM 108 =ON, lúc đó:
- Reset Keep 503=(OFF) kết thúc nạp từ: tiếp điểm này nhả tương đương như nhả nút ấn nạp từ ở chế độ tay, và như vậy quá trình thực hiện cũng giống như vậy: ngắt lượng đặt của chỉnh lưu đồng thời nối điểm điện áp điều khiển xuống đất (Uđk=0) để ngắt nhanh dòng điện nạp từ.
Như vậy tổng thời gian nạp từ là 2,3s+3,2s=5,5s (tnạp từ = tTIMER101(=3,3s) -1s+ tTIMER108(=3,2s)); trong đó nạp chuẩn bị (không ép) là 2,3s và nạp-ép là 3,2s.
- Keep 503=0FF cũng làm TIM101=OFF;- Reset Keep 511=(OFF).- Reset Keep 504 (OFF) => làm ngắt các Timer: TIM102=OFF;
TIM103=OFF; TIM108=OFF; TIM110=OFF;- Run TIM104 với tTIM104=3,5s; đây là khoảng thời gian để đảm bảo mạch
thực hiện xong việc nhả công-tắc-tơ nạp từ CJ1 ở trạng thái không có dòng điện hoàn toàn tương tự như nhả nút nạp từ (với thời gian là 3 giây), TIM104 không tham gia trực tiếp vào quá trình này mà chỉ cần có thời gian đặt lớn hơn thời gian thực hiện quá trình nhả CJ1.
Keep 506=ON sau 3,5s khi TIM104=ON, dẫn tới:- Reset 505 => Keep 505=OFF. - Bắt đầu bắt đầu quá trình khử từ: tiếp điểm của Keep 506 đấu song song
với nút ấn “khử từ” của chế độ tay, do đó quá trình khử từ tiếp tục xảy ra như ở chế độ tay: sau 0,5 giây thì CTT khử từ đóng và tiếp theo 0,3 giây nữa thì cấp lượng đặt dòng khử từ cho mạch chỉnh lưu.
- Run TIM105 bắt đầu chạy (tTIM105=2,5s).Đây là giai đoạn máy vẫn thực hiện quá trình ép (vẫn giữ mạch điều khiển cho
PTT đi xuống và PTDđi lên) đồng thời cấp dòng khử từ và được gọi là giai đoạn “Holding the pressure and discharging-demagnetizing”.
23

Chương 2: Tìm hiểu và phân tích chương trình điều khiển PLC-CPM1A
Như vậy tổng thời gian có dòng khử từ chỉ kéo dài 1,7 giây (=2,5s-0,5s-0,3s= tTIMER105(=2,5s)- 0,5s-0,3s).
Khi TIM105 (2,5s)=ON => Keep 507=ON , lúc đó:- Reset 506 => Keep 505=OFF kết thúc quá trình khử từ: tiếp điểm này nhả
tương đương như nhả nút ấn khử từ ở chế độ tay: ngắt cả lượng đặt dòng khử từ đồng thời với nối đất điểm điện áp điều khiển (Uđk=0) và sau 2,5 giây thì nhả CTT khử từ.
- Khi Keep 505=OFF => TIM 104=OFF;- Keep 507 bật trực tiếp 011.03 (J8=1) cho phép chạy nhanh. - 010.06=ON => J4=1 => PTT di chuyển nhanh lên hết hành trình để công
tắc hạn chế trên tác động => 001.01=ON và như vậy PTT đã trở về vị trí ban đầu.
Keep 508=ON do cửa Set thông: Keep 507(ON) – 001.01(ON)- Reset Keep 507;- 011.00=ON => J5=1 để PTD đi lên với tốc độ bình thường đến hết hành
trình, tức là cho đến khi công tắc hạn chế tác động (001.03=ON), lúc đó PTD cũng trở về vị trí ban đầu. Đây là giai đoạn để đẩy nam châm (từ dạng bột thành khuôn hình khối chữ nhật) lên trên, ra khỏi khuôn đến vị trí cho phép lấy nam châm ra dễ dàng.
Keep 509=ON do cửa Set509 bật: Keep 508(ON) – 001.03(ON)- Reset Keep 508=OFF
(Keep 509 chỉ Reset lúc bắt đầu chạy chế độ tự động khi ấn nút Start).
Đến đây là hết một chu trình vận hành ở chế độ tự động, các pittong đã trở về vị trí ban đầu của nó để sẵn sàng một chu trình mới.
24

Chương 2: Tìm hiểu và phân tích chương trình điều khiển PLC-CPM1A
Hình 2.4. Lưu đồ điều khiển chế độ tự động 1
25

Chương 2: Tìm hiểu và phân tích chương trình điều khiển PLC-CPM1A
Hình 2.5. Lưu đồ điều khiển chế độ tự động 2
26

Chương 2: Tìm hiểu và phân tích chương trình điều khiển PLC-CPM1A
Hình 2.6. Lưu đồ điều khiển chế độ tự động 3
27

Chương 3: Thiết kế hệ điều khiển dùng thiết bị Misubishi
CHƯƠNG 3
TÌM HIỂU VÀ LẬP TRÌNH CHO BỘ ĐIỀU KHIỂN PLC VÀ MÀN HÌNH GOT-1000
3.1 Tìm hiểu về PLC FX-3U
3.1.1 Các thông số cơ bản
PLC FX3U thuộc họ FX của hãng MISUBISHI sản xuất – là loại PLC đơn khối có thể dễ dàng kết nối thêm các module và nhiều PLC với nhau.
- PLC Misubishi FX3U-32MR- Bộ CPU với 32 đầu vào/ra: với 16 đầu vào và 16 đầu ra- Nguồn cung cấp : 100-240VAC- Công suất tiêu thụ: 35W- Đồng hồ thời gian thực - Bộ đếm: 235- Timer: 512- Có thể mở rộng đến 384 ngõ vào/ra- Truyền thông: RS232C,RS 485
28

Chương 3: Thiết kế hệ điều khiển dùng thiết bị Misubishi
Hình 4.1 PLC-FX3U
1. Các đèn báo hệ thống+, Đèn (POWER): nguồn.+, Đèn (RUN): PLC đang chạy hoặc kiểm tra (đèn sáng màu xanh) và lỗi khi không sáng hoặc đang lập trình.+, Đèn (ERROR): sáng xanh khi đang chạy không có lỗi,sáng đỏ khi có lỗi.+, Đèn (BATT): chỉ nguồn trong của PLC (pin).
2. Cổng ghép nối PLC với máy tính hoặc thiết bị lập trình.3. Đèn chỉ thị địa chỉ đầu ra.4. Đèn chỉ thị địa chỉ vào.5. Chân nối cho đầu ra.6. Chân nối cho đầu vào.
3.1.2. Các lệnh cơ bản và phân công địa chỉ trong PLC FX-3U được dùng trong máy nạp từ
Bảng 3.1. Bảng mã lệnh trong lập trình PLC
STT Tên lệnh Chức năng
1 LOAD Tạo công tắc NO2 LOAD Tạo công tắc NC
29

Chương 3: Thiết kế hệ điều khiển dùng thiết bị Misubishi
INVERSE3 OUT Điều khiển cuộn dây (có thể nối song song)
4 AND Nối tiếp nhiều công tắc NO
5 AND INVERSE
Nối tiếp nhiều công tắc NC
6 SET Đặt Bit trạng thái7 RESET Đặt lại Bit trạng thái8 END Kết thúc chương trình
9 TIMER Bộ đếm định thời10 CALL Gọi chương trình con11 CJ Nhảy con trỏ tới vị trí xác định12 OR Nối song song công tắc NO(tối đa 10 nhánh)
13 OR INVERSE Nối song song công tắc NC(tối đa 10 nhánh)14 FEND Kết thúc chương trình con hiện hành trở về ngay sau lệnh
CALL vừa thực thi15 RET Kết thúc quá trình quét của PLC và trở lại từ đầu
+) Lệnh LOAD và LOAD INVERSE
+) Lệnh OUT
+) Lệnh AND và AND INVERSE
30

Chương 3: Thiết kế hệ điều khiển dùng thiết bị Misubishi
+) Lệnh OR và OR INVERSE
+) Lệnh SET và RESET
+) Lệnh TIMER
+) Lệnh END
31

Chương 3: Thiết kế hệ điều khiển dùng thiết bị Misubishi
+) Lệnh CJ
+) Lệnh CALL
+) Lệnh RET
Bảng 3.2. Bảng phân công địa chỉ đầu vào PLC FX3U
Stt Địa chỉ Ký hiệu Chức năng Chú thích1 000.00 M0 Chọn chế độ tự động/tay -2 000.01 M1 Phím điều khiển PTT đi lên Chế độ tay3 000.02 M2 Phím điều khiển PTT đi xuống Chế độ tay4 000.03 M3 Phím chạy nhanh Chế độ tay5 000.04 M4 Phím điều khiển PTD đi lên Chế độ tay6 000.05 M5 Phím điều khiển PTD đi xuống Chế độ tay7 000.06 M6 Phím chạy ở chế độ tự động Khởi động chế độ tự động8 000.07 M7 Phím nạp từ Chế độ tay9 000.08 M8 Phím khử từ Chế độ tay
32

Chương 3: Thiết kế hệ điều khiển dùng thiết bị Misubishi
10 000.09 M9 Phím khẩn cấp Dừng khẩn cấp11 000.10 - - -12 000.11 - - -13 001.00 - - -14 001.01 X1 Công tắc hạn chế PTT đi lên -15 001.02 X2 Công tắc hạn chế PTT đi xuống -16 001.03 X3 Công tắc hạn chế PTD đi lên -17 001.04 X4 Công tắc hạn chế PTD đi xuống -18 001.05 - -
Bảng 3.3. Bảng phân công địa chỉ đầu ra của PLC FX3U
Stt Địa chỉ Kí hiệu Chức năng Chú thích1 010.00 Y0 - Không dung2 010.01 Y1 Tiếp điểm với điện áp điều khiển chỉnh lưu Uᵈᵏ3 010.02 Y2 Tiếp điểm với triết áp khử từ U khử từ4 010.03 Y3 Tiếp điểm với triết áp nạp từ U nạp từ5 010.04 Y4 Rơ le nạp từ CJ1 -6 010.05 Y5 Rơ le khử từ CJ2 -7 010.06 Y6 CTT điều khiển PTT đi lên Van thủy lực DT18 010.07 Y7 CTT điều khiển PTT đi xuống Van thủy lực DT29 011.00 Y10 CTT điều khiển PTD đi lên Van thủy lực DT310 011.01 Y11 CTT điều khiển PTD đi xuống Van thủy lực DT411 011.02 Y12 CTT di chuyển thường Van thủy lực DT512 011.03 Y13 CTT di chuyển nhanh Van thủy lực DT613 COM0 YCOM - Không dùng14 COM1 Z12 Nối với 0V điều khiển Uᵈᵏ =0V15 COM2 Z30 Tiếp điểm cấp U đặt dòng chỉnh lưu16 COM3,
4+24V Nối cực dương của nguồn 24VDC Nguồn điều khiển
3.1.3 Bảng so sánh đầu vào đầu ra giữa PLC CPM1A và FX 3U
Bảng 3.4.so sánh địa chỉ đầu vào ra giữa PLC CPM1A và FX3U
Stt Đầu Vào
Chức Năng
Đầu Ra
Chức NăngOmron Misubishi Omron Misubishi
1 000.00 M0 Chế độ tự động 010.00 Y0 -
33

Chương 3: Thiết kế hệ điều khiển dùng thiết bị Misubishi
2 000.01 M1 PTT đi lên 010.01 Y1 Uđk
3 000.02 M2 PTT đi xuống 010.02 Y2 Cấp dòng khử
4 000.03 M3 Di chuyển nhanh 010.03 Y3 Cấp dòng nạp
5 000.04 M4 PTD đi lên 010.04 Y4 Đóng CTT nạp
6 000.05 M5 PTD đi xuống 010.05 Y5 Đóng CTT khử
7 000.06 M6 Khởi động 010.06 Y6 PTT lên
8 000.07 M7 Nạp từ 010.07 Y7 PTT xuống
9 000.08 M8 Khử từ - - -
10 000.09 M9 Dừng khẩn cấp - - -
11 000.10 - 011.00 Y10 PTD lên
12 000.11 011.01 Y11 PTD xuống
13 001.00 011.02 Y12 Di chuyển thường
14 001.01 X1 Hạn chế PTT lên 011.03 Y13 Di chuyển nhanh
15 001.02 X2 Hạn chế PTT xuống
Y14
16 001.03 X3 Hạn chế PTD lên
17 001.04 X4 Hạn chế PTD xuống
18 001.05
3.2 LẬP TRÌNH MÀN HÌNH ĐIỀU KHIỂN GOT-1000
3.2.1 Tổng quan về màn hình HMI vá cách kết nối với PLC
a) Giới thiệu màn hình HMI
34

Chương 3: Thiết kế hệ điều khiển dùng thiết bị Misubishi
Hình 3.1. Màn hình HMI
Màn hình hay còn được gọi là HMI (Human Mechine Interface) được ứng dụng rất nhiều trong công nghiệp. Màn hình gồm nhiều chủng loại khác nhau của các hãng như Mitsubishi, Siemen, Omron, Delta,…Mỗi hãng sản xuất đều có một số tính năng như bộ lập trình bằng tay, giám sát quá trình sản xuất, truy cập các thông số, dữ liệu cài đặt……Ngoài các tính năng trên màn hình HMI còn có thể cho nhiều tính năng khác như đồ họa để mô phỏng các thiết bị trong quá trình sản xuất giúp người vận hành các thiết bị có cái nhìn trực quan hơn về hệ thống sản xuất, giúp họ dễ thao tác kiểm tra hệ thống nhanh và hiệu quả hơn.Màn hình HMI là loại màn hình tuy cho phần giao diện không lớn song chủng loại màn hình này được tích hợp nhiều chức năng rất mạnh. Ta có thể sử dụng loại màn hình này để tạo các hình ảnh đồ họa giúp ta có cái nhìn trực quan hơn về hệ thống. Bên cạnh cái nhìn trực quan về hệ thống thì những hình ảnh đó còn cho phép ta điều khiển và giám sát hệ thống một cách linh hoạt và dễ dàng. Loại màn hình này cho phép tới 500 trang màn hình ứng dụng, điều này giúp người sử dụng có thể giám sát hệ thống sản xuất phức tạp. Bên cạnh đó màn hình còn có chức năng như một bộ lập trình bằng tay giúp người sử dụng có thể trực tiếp lập trình cho bộ điều khiển PLC mà không cần phải sử dụng đến máy tính….
b) Cách kết nối HMI và PLC
35

Chương 3: Thiết kế hệ điều khiển dùng thiết bị Misubishi
Hình 3.2. HMI kết nối với PLC
Hình 3.3. Dùng nguồn nuôi riêng 24VDC.
Hình 3.4. Sơ đồ kết nối các màn hình với PLC
3.2.2 Giới thiệu màn hình GOT-1000
Màn hình điều khiển GOT-1000 là giao diện giữa người và máy còn được gọi tắt là HMI (Human Machine Intetface).Trên màn hình hiển thị những phím chức năng cần thiết cho quá trình làm việc tạo sư thoải mái và thao tác dễ dàng cho người điều khiển.Là một sản phẩm của hãng MISUBISHI chế tạo có công dụng giảm thiểu những phím bấm và các công tắc vật lý giảm thiểu sự cồng kềnh của máy cũng như thuận tiện cho người sử dụng.Chính vì những ưu điểm như trên mà GOT-1000 được ứng dụng rộng rãi trong thực tế các cỗ máy công nghiệp lớn.GOT-1000 có những thông số sau:
36

Chương 3: Thiết kế hệ điều khiển dùng thiết bị Misubishi
Hình 3.5. Màn hình GOT-1000
- Là loại màn hình cảm ứng với kích thước khoảng 5,7 inch có hỗ trợ nhiều màu. - Được sử dụng cho tất cả các loại PLC họ MELSEC và các loại PLC khác. - Cho phép gõ chữ Unicode. - Có hỗ trợ cổng USB và thẻ nhớ Flash. - Độ phân giải là 320×420.- Khả năng kết nối với Enthernet,CC-Link,MELSECNET/10.- Bộ nhớ trong 6Mb.- Hỗ trợ các cổng giao tiếp như RS232,RS422.
3.2.3. Phần mềm lập trình cho GOT-1000
MELSEC hỗ trợ cho lập trình viên công cụ lập trình cưc kì mạnh mẽ và hữu dụng giúp cho lập trình viên có thể tự tạo cho mình cũng như cỗ máy những chức năng tiện dụng tạo cỗ máy uy lực công nghệ khẳng định sự vượt trội.Phần mềm thiết kế giao diện màn hình mang tên GT-DESIGNER đã phần nào cho thấy sự vượt trội này với giao diện đơn giản và đẹp mắt có hỗ trợ nhiều công cụ mạnh mẽ hữu ích giúp cho GOT-1000 dễ dàng sử dụng hơn cho người điều khiển.
Giao diện của GT-DESIGNER
Hình 3.6 Giao diện lập trình của GT-DESIGNER
37

Chương 3: Thiết kế hệ điều khiển dùng thiết bị Misubishi
Với những công cụ mạnh mẽ và cách tạo project đơn giản cùng cách cài đặt cho các màn hình làm việc của GOT_1000 mà lập trình viên sẽ tạo ra rất thân thiết.
3.2.4. Lập trình màn hình GOT-1000
a)Tạo project mới
Đầu tiên ta cần khởi tạo một project mới với các thông số của màn hình HMI và loại PLC mà ta cần lập trình được sử dụng cho máy. Khởi động chương trình GT-DESIGNER sẽ xuất hiện cửa sổ lựa chọn và cài đặt cho project mới ta chọn new (hình 3.7) →next (hình 3.8) → lựa chọn thông số và độ phân giải màn hình chọn next (hình 3.9) → chọn loại PLC làm việc (hình 3.10) → cuối cùng chọn finish để kết thúc quá trình cài đặt màn hình và các thông số liên quan. Sau đó chọn kiểu màn hình là Base Screen để bắt đầu lập trình cho GOT-1000
Hình 3.7. Tạo project mới
Hình 3.8. Khởi động tùy chọn màn hình
38

Chương 3: Thiết kế hệ điều khiển dùng thiết bị Misubishi
Hình 3.9. Chọn loại màn hình cùng độ phân giải màn hình
Hình 3.10. Chọn PLC cần lập trình
Hình 3.11. Chọn kiểu kết nối với PLC
39

Chương 3: Thiết kế hệ điều khiển dùng thiết bị Misubishi
Hình 3.12. Giao diện màn hình thiết kế
+) Khởi tạo ba màn hình hoạt động gồm:
- Màn hình 1: màn hình chọn chế độ tay/tự động (main).
- Màn hình 2: màn hình ở chế độ điều khiển tự động (TU DONG).
- Màn hình 3: màn hình ở chế độ điều khiển bằng tay (TAY).
b) Lập trình cho GOT-1000
- Bước 1: Chọn các loại công tắc có chức năng phù hợp với yêu cầu.
- Bước 2: Cài đặt thông số cho các công tắc đã chọn.
- Bước 3: Tạo văn bản trên giao diện màn hình.
Với chức năng của máy nạp từ ZCY25-200 thì ta cần khởi tạo ba màn hình như trên. Ở màn hình (main) thì cần tạo hai công tắc: (TAY) và (TU DONG) để chọn chế độ điều khiển cho máy. Ở màn hình (TU DONG) thì ta cần tạo ba công tắc đó là: (CHAY) với chức năng khởi động quá trình làm việc tự động, (KHAN CAP) dùng trong trường hợp có sự cố nguy hiểm có thể xảy ra cần được dừng máy và (TRO VE) có chức năng trở về màn hình điều khiển máy (main). Ở màn hình chế độ điều khiển bằng tay (TAY) thì cần nhiều loại công tắc:
- Công tắc PTT lên và xuống
- Công tắc PTD lên và xuống
- Công tắc nạp từ và khử từ
- Công tắc (TRO VE) và (KHAN CAP)
40

Chương 3: Thiết kế hệ điều khiển dùng thiết bị Misubishi
Hình 3.13. Giao diện điều khiển của màn hình main
Hình 3.14. Giao diện điều khiển chế độ tự động (TU DONG)
41

Chương 3: Thiết kế hệ điều khiển dùng thiết bị Misubishi
Hình 3.15. Giao diện điều khiển chế độ tay (TAY)
c) Thống kê các lệnh khi lập trình
Trong quá trình lập trình thiết kế màn hình GOT-1000 ta cần dùng những lệnh và biến khai báo (bit dữ liệu) sau:
Bảng 4.1. Các lệnh dùng trong lập trình
Stt Kí hiệu Tên lệnh Chức năng1 Bit Switch Công tắc chuyển chế độ2 Go To Screen Switch Công tắc chuyển màn hình
3 Multi Action Switch Công tắc đa nhiệm vụ
4 Text Tạo văn bản
5 Line Tạo đường thẳng6 Time Tạo thời gian cho máy trên màn hình7 Date Tạo ngày cho máy trên màn hình
Bảng 4.2. Các bit dữ liệu chính
Device Points Screen Number Object Coordinates Object ID0-FF M0 Base - 1 Multi Action Switch 32,160 10000
42

Chương 3: Thiết kế hệ điều khiển dùng thiết bị Misubishi
Base - 1 Multi Action Switch 224,160 10001M1 Base - 3 Bit Switch 16,48 10001M2 Base - 3 Bit Switch 16,112 10007M3 Base - 3 Bit Switch 48,176 10003M4 Base - 3 Bit Switch 96,48 10002M5 Base - 3 Bit Switch 96,112 10004M6 Base - 2 Bit Switch 224,96 10002M7 Base - 3 Bit Switch 208,112 10006M8 Base - 3 Bit Switch 208,48 10005M9 Base - 2 Bit Switch 128,176 10001
Base - 3 Bit Switch 240,176 10008Bảng 4.2. Các bit dữ liệu phụ
Screen CoordinatesText B-1 80,80Time Display B-1 16,112Date Display B-1 240,112Line B-1 128,112Line B-1 192,64Scale B-1 160,80Text B-1 32,0Text B-1 64,48Text B-2 80,16Line B-2 80,32Line B-2 176,48Time Display B-2 0,16Date Display B-2 256,16Text B-3 16,160Text B-3 96,160Text B-3 80,16Line B-3 256,16Time Display B-3 0,16Date Display B-3 256,16Line B-3 80,32
43

Chương 4: Thử nghiệm thiết kế tại phòng thí nghiệm bộ môn
Chương 4
CHẠY THỬ CHƯƠNG TRÌNH TRÊN THIẾT BỊ CỦA MITSUBISHI TẠI PHÒNG THÍ NGHIỆM BỘ MÔN
4.1 Nạp chương trình vào PLC
4.1.1 Nạp chương trình xuống màn hình HMI
Sau khi đã tạo được 3 trang màn hình dưới đây:
Hình 4.1. Màn hình thiết kế trong GT-DESIGNER
-) Vào biểu tượng trên màn hình communication → to/From Got:
44

Chương 4: Thử nghiệm thiết kế tại phòng thí nghiệm bộ môn
Hình 4.2.Chọn To GOT
Hình 4.3. Chọn Base Screen
-) Chọn base screen → download.
45

Chương 4: Thử nghiệm thiết kế tại phòng thí nghiệm bộ môn
Hình 4.4. Xác nhận nạp chương trình
Hình 4.5. Quá trình nạp chương trình vào màn hình
Sau khi nạp chương trình xuống màn hình HMI xuất hiện giao diện màn hình như ta đã thiết kế:
46

Chương 4: Thử nghiệm thiết kế tại phòng thí nghiệm bộ môn
Hình 4.6. Màn hình điều khiển chọn chế độ
Hình 4.7. Màn hình điều khiển ở chế độ tự động
47

Chương 4: Thử nghiệm thiết kế tại phòng thí nghiệm bộ môn
Hình 4.8. Màn hình điều khiển chế độ tay
4.1.2 Nạp chương trình vào PLC- FX3U
Sau khi chuyển đổi chương trình PLC-CPM1A sang chương trình PLC- FX3U ta tiến hành nạp chương trình vào máy PLC- FX3U theo trình tự dưới đây:
Trên thanh công cụ của GX Developer chọn biểu tượng Online → Transfer Setup (hình 4.9).
Hình 4.9. Transfer Setup
Trong Transfer Setup chọn biểu tượng Serial để chọn đường kết nối từ PC xuống PLC. Có 2 kiểu kết nối thông thường là kết nối qua cổng RS232C và qua cổng USB.
Ở đây ta chọn kết nối qua cổng USB.
48

Chương 4: Thử nghiệm thiết kế tại phòng thí nghiệm bộ môn
Hình 4.10. Chọn đường dẫn từ PC xuống PLC
Sau khi chọn xong đường dẫn từ PC xuống PLC ta tiến hành kiểm tra kết nối của đường dẫn bằng cách kíchvào biểu tượng Connection test trong Transfer Setup (hình 4.11).
Hình 4.11. Thông báo chương trình đã được nạp vào PLC
49

Chương 4: Thử nghiệm thiết kế tại phòng thí nghiệm bộ môn
Sau khi xác định đường dẫn từ PC xuống PLC đã thông ta tiến hành đổ chương trình đã lập trình vào máy PLC bằng cách vào biểu tượng Online→ Write to PLC → Program → MAIN. Sau đó kick vào ô Execute để đổ chương trình vào máy đến khi hiện lên biểu tượng Completed tức là đã hoàn thành quá trình nhập chương trình vào máy PLC (hình 4.12)
Hình 4.12. Nạp chương trình vào PLC và thông báo hoàn thành.
4.2 Chạy thử chương trình
Bảng 4.1. Bảng phân công địa chỉ PLC- MITUBISHI
STT Vào Chức năng Ra Chức năng
1 M0 Chọn chế độ tay/ Auto Y000 đầu ra chỉ ở phần chương trình Auto
2 M1 Nút ấn điều khiển pittong-trên đi lên
Y001 tác động khi các côngtăctơ nạp hoặc khử từ đóng
3 M2 Nút ấn điều khiển pittong-trên đi xuống
Y002 nối tới điểm giữa của triết áp khử từ (trên cửa tủ)
4 M3 Nút ấn chay nhanh Y003 nối với điểm giữa của triết áp nạp từ (trên cửa tủ)
5 M4 Nút ấn điều khiển pittong-dưới đi lên
Y004 công-tắc-tơ đóng cho chiều nạp từ
50

Chương 4: Thử nghiệm thiết kế tại phòng thí nghiệm bộ môn
6 M5 Nút ấn điều khiển pittong-dưới đi xuống
Y005 công-tắc-tơ đóng cho chiều khử từ
7 M6 Nút ấn “Start” chế độ Auto Y006 công-tắc-tơ đóng cho pittong-trên đi lên
8 M7 Nút ấn “Nạp từ” Y007 công-tắc-tơ đóng cho pittong-trên đi xuống
9 M8 Nút ấn “Khử từ” Y010 công-tắc-tơ đóng cho pittong-dưới lên
10 M9,X005 Dừng khẩn cấp Y011 công-tắc-tơ đóng cho pittong-dưới xuống
11 Đầu vào có ở phần chương trình Auto
Y012 luôn tác động đồng thời với tất cả (J3-J6)
12 không dùng Y013 chạy nhanh – Fast Speed13 không dùng Sử dụng với Y00 (không rõ
chức năng)14 X001 Công tắc hạn chế pittong-
trên đi lênNối với 0V điều khiển (nối
đất Z18 khi tác động)15 X002 Công tắc định vị trí pittong-
trên đi xuốngNối để cấp đặt dòng nạp từ
hoặc khử từ tới đk16 X003 Công tắc hạn chế pittong-
dưới đi lênnối với cực (+) của nguồn
24VDC17 X004 Công tắc hạn chế pittong-
dưới đi xuống18 không dùng
Sau khi nạp chương trình PLC từ PC vào máy PLC-FX3U ta vào Online→Monitor → Monitor Mode để bật quá trình chạy thử lên (hình 4.13)
51

Chương 4: Thử nghiệm thiết kế tại phòng thí nghiệm bộ môn
Hình 4.13. Bật quá trình chạy thử trên PC
Sau khi đã nạp 2 chương trình PLC và chương trình cho màn hình vào máy thì máy PLC-FX3U sẽ có dạng như hình 4.14.
Hình 4.13. PLC-FX3U sau khi đã nạp chương trình
52

Chương 4: Thử nghiệm thiết kế tại phòng thí nghiệm bộ môn
Ta tiến hành chạy thử chương trình theo các bước dưới đây:
Bật công tắc AUTO (M0) thiết lập trạng thái ban đầu lúc này đèn X1(hạn chế PT trên đi lên ) và đèn X3 (hạn chế PT dưới đi lên ) đang ở chế độ ON.
Bật công tắc START (M6) thì đèn Y11 (PT dưới di chuyển xuống) và đèn Y13 (di chuyển nhanh) đồng thời sáng (ON) ,khi PT dưới di chuyển xuống thì ngay lập tức đèn X3 (hạn chế PT dưới đi lên ) tắt (OFF), sau khi Pt đi hết hành trình thì đèn X4 (hạn chế PT dưới đi xuống ) sáng (ON) lúc này đèn Y11 (PT dưới di chuyển xuống) và đèn Y13 (di chuyển nhanh) tắt (OFF) , trạng thái dừng để đổ bột vào khuôn.
Bật công tắc START (M6) lần 2 thì đèn Y7 (PT trên xuống), đèn Y13 (di chuyển nhanh) đồng thời sáng (ON) để ép bột vào khuôn, khi PT dưới di chuyển xuống thì ngay lập tức đèn X1(hạn chế PT trên đi lên ) tắt (OFF) . Bắt đầu quá trình ép nạp – khử từ, sau khi Pt đi hết hành trình thì đèn X2 (Định vị PT trên đi xuống ) sáng (ON) => đèn Y7 (PT trên xuống) tắt (OFF) , đèn Y4 (đóng ctt nạp từ) sáng (ON) sau 0.5s đèn Y3 (cấp dòng nạp từ) sáng (ON) đồng thời đèn Y13 (di chuyển nhanh) tắt (OFF) . Sau 3.3s công tắc X4 (hạn chế PT trên đi xuống ) tắt (OFF) => đèn Y10 (PT dưới lên ) sáng (ON) , sau khi PT dưới đi hết hành trình thì đèn X3 (hạn chế PT dưới đi lên ) sáng (ON) sau 0.5s thì đèn Y3 (cấp dòng nạp từ) tắt (OFF) , đèn Y1 ( Udk=0) sáng (ON) sau 0.5s thì đèn Y4 (đóng ctt nạp từ) và đèn Y1 (Udk=0) tắt (OFF). Sau đó đèn Y5 (đóng ctt khử từ) sáng (ON) sau 0.5s thì đèn Y2 (cấp dòng khử từ) sáng (ON) . Sau 0.5s đèn Y2 (cấp dòng khử từ) tắt (OFF) đèn Y1 ( Udk=0) sáng (ON) sau 0.5s thì đèn Y5 (đóng ctt khử từ) và đèn Y1 (Udk=0) tắt (OFF) => đèn Y6 (PT trên lên) sáng (ON) đồng thời công tắc X3 (hạn chế PT dưới đi lên ) sáng (ON) và đèn Y10( PT dưới lên) tắt (OFF) và đèn Y13 ( di chuyển nhanh) sáng (ON) sau khi đi hết hành trình thì đèn X1 (hạn chế PT trên lên) sáng (ON) kết thúc 1 chu kỳ làm việc.
Kết luận : chương trình hoạt đọng theo đúng chương trình thiết kế, phù hợp với yêu cầu công nghệ của máy.
53

Chương 2: Tổng quan về máy nạp từ ZCY25-200
1