-
7/28/2019 Cm Lecture1
1/49
Romain TeyssierContinuum Mechanics 2011
Continuum Mechanics
Lecture 1
Solid mechanics
Prof. Romain Teyssier
http://www.itp.uzh.ch/~teyssier
-
7/28/2019 Cm Lecture1
2/49
Romain TeyssierContinuum Mechanics 2011
- Point mechanics
- Fundamentals laws of mechanics
- Continuum mechanics
- Kinetic energy theorem
- Rigid body motions
- Internal forces
- Stress field and stress tensor
- Displacement field and strain tensor
Outline
-
7/28/2019 Cm Lecture1
3/49
A point particle is defined by its position in space with
respect to anarbitrary reference point, O, accompanied by a
coordinate system: theframe of reference.
Space geometry is Euclidian. Time is considered as absolute
andhomogeneous.
Fundamental quantities for point kinematics are:
Position:
Velocity:
Acceleration:
Derivatives are taken along the particle trajectory.
Trajectory: the path of a particle through space in the frame of
reference.
Romain TeyssierContinuum Mechanics 2011
Point mechanics
OM
v =d
dt
OM
a =d
dt
v
-
7/28/2019 Cm Lecture1
4/49
The frame of reference is usually defined by 4 objects
the origin and 3 unit vectors forming the frame of a vector
space.
The 3 vectors form an orthonormal basis.
for i different from j
Both A and the vector basis can be fixed or can vary with
time.
Romain TeyssierContinuum Mechanics 2011
The frame of reference
(A,n1,n2,n3)
(n1,n2,n3)
ni ni = 1
ni nj = 0
-
7/28/2019 Cm Lecture1
5/49
Coordinates of the point particle are function of time.
Since the frame is fixed,
The velocity writes
In vector notations:
OM= x(t)i+ y(t)j + z(t)k
i = 0 j = 0k = 0
v =d
dt
OM = xi + yj + zk
v = ( x, y, z) a = (x, y, z)
Romain TeyssierContinuum Mechanics 2011
Cartesian frame
(O,i,j,k)
A fixed frame of reference
-
7/28/2019 Cm Lecture1
6/49
OM = r(t)r(t) + z(t)k
= ( sin , cos , 0)
r =dr
d
= =d
d
= r
Romain TeyssierContinuum Mechanics 2011
Cylindrical coordinates
The frame is now moving with the particle
We introduce the radial and azimuthal vectors that nowdepend on
time.
(O,r, ,k)
r = (cos , sin , 0)
-
7/28/2019 Cm Lecture1
7/49
OM = (r, 0, z)
v = ( r, r, z)
a = (r r2, 2r2 + r, z)
Romain TeyssierContinuum Mechanics 2011
Kinematics in cylindrical coordinates
-
7/28/2019 Cm Lecture1
8/49
cos sin
sin
0 Romain TeyssierContinuum Mechanics 2011
Spherical coordinates
(O,r, , )
r = sin cossin sin
cos
= cos cos
= sincos
The moving frame is now defined by
We introduce the radial, azimuthal and polar vectors.
-
7/28/2019 Cm Lecture1
9/49
OM = (r, 0, 0)
v = r, r, r sin a = for homework
Romain TeyssierContinuum Mechanics 2011
Kinematics in spherical coordinates
-
7/28/2019 Cm Lecture1
10/49
The trajectory is known: we define thecurvilinear coordinate by
the length of the
curve from A to M:
The tangent vector is defined as . We have
The normal vector is defined as . We have
Finally, the binormal vector is just
The velocity is obtained as
and the acceleration by
M
s(t) = AM(t)
b = t n
Romain TeyssierContinuum Mechanics 2011
Curvilinear coordinates and the Frenet frame
A
Ris the curvatureradius of the trajectory
t =d
ds
OM
t
= 1
n =1
dt
ds
dt
dsn t = 0
v = s(t)t
a = s(t)t +v2
Rn
-
7/28/2019 Cm Lecture1
11/49
A particle trajectory is only defined relative to a frame.
A frame is defined by a reference point and 3 units orthogonal
vectors.
We have seen one example of fixed frame:
the Cartesian frame with Cartesian coordinates
and 3 moving frames:
with cylindrical coordinates
with spherical coordinates
and with curvilinear coordinates
(x,y,z)
(s, 0, 0)
Romain TeyssierContinuum Mechanics 2011
Conclusion on point kinematics
(r, , z)
(r, ,)
-
7/28/2019 Cm Lecture1
12/49
The principle of inertia (Galileo 1630) or Newtons first law of
motion:
Every body remains in a state of rest or uniform motion unless
it is actedupon by an external unbalanced force.
For an isolated particle,
This property is called inertia.
It is true only in a certain set of frames of reference, the
so-called Galileanor Newtonian or inertial frames defined as fixed
or non-accelerated frames.
v =
cst
Romain TeyssierContinuum Mechanics 2011
The fundamental laws of mechanics
-
7/28/2019 Cm Lecture1
13/49
The fundamental principle of mechanics (Newton 1680) or
Newtonssecond law of motion:
A body of mass m subject to a net force Fundergoes and
acceleration asuch as F=ma. If we define the momentum of the
particle asp=mv, thenNewtons second law states that the total force
applied to the particle is
equal to the time derivative of the momentum.
Warning: the second law is also valid only in an inertial
frame.
F = mdv
dt=
dp
dt
Romain TeyssierContinuum Mechanics 2011
The fundamental laws of mechanics
-
7/28/2019 Cm Lecture1
14/49
JO =
OM
P
d
dt
JO =
OM
F =
TO(F)
Romain TeyssierContinuum Mechanics 2011
The fundamental laws of mechanics
Angular momentum of a particle relative to the frame center
O:
We can show that the angular momentum variation is equal to the
torque of
the forces acting on the particle
-
7/28/2019 Cm Lecture1
15/49
The law of action-reaction (Newton 1680) or Newtons third
law:
The mutual forces of action and reaction between two bodies are
equal,opposite and collinear. This means that whenever a first body
exerts a forceFon a second body, the second body exerts a force
-Fon the first body.
r ij
F ij = 0
Romain TeyssierContinuum Mechanics 2011
The fundamental laws of mechanics
F ij =
F ji
-
7/28/2019 Cm Lecture1
16/49
Romain TeyssierContinuum Mechanics 2011
The fundamental laws of mechanics
-
7/28/2019 Cm Lecture1
17/49
r ij
F ij = 0
Romain TeyssierContinuum Mechanics 2011
The fundamental laws of mechanics
F ij =
F ji
F=
m
dv
dt=
dp
dt
F = 0 v =
cst1.
2.
3.
-
7/28/2019 Cm Lecture1
18/49
We now consider a system of point particles moving together.
Continuum mechanics is the macroscopic description of a system
ofmicroscopic particles (defined by their masses and
coordinates).
We assume that we can separate the macroscopic scales (the size
of the
solid, the depth of the liquid) from the microscopic scales (the
size of theparticles, the average distance between them).
A particular point: the center of mass
A particular frame: the center of mass frame moves at the center
of massvelocity
Romain TeyssierContinuum Mechanics 2011
The fundamental laws of continuum mechanics
mi
OMi = mi
OG
mi
OMi
vG =
d
dt
OG
-
7/28/2019 Cm Lecture1
19/49
JO =
J 0,i
OMi =
OG+
GMi
JO =
JG +
OG MvG
Romain TeyssierContinuum Mechanics 2011
The fundamental laws of continuum mechanics
Similarly, we can define the total, macroscopic angular momentum
as:
vi = vG + v
i
-
7/28/2019 Cm Lecture1
20/49
F =
F i,ext +
F i,int
Romain TeyssierContinuum Mechanics 2011
The fundamental laws of continuum mechanics
Forces can be divided into 2 categories: external and
internal
Newtons 3rd law in weak form: internal forces add up to
zero.
Newtons 2nd law can be generalized to the center of mass:
F=
F i,ext=
M
dvG
dt
-
7/28/2019 Cm Lecture1
21/49
d
dt
JO =
TO (Fext)
TO (Fext) =
OMi
F i,ext
Romain TeyssierContinuum Mechanics 2011
The fundamental laws of continuum mechanics
Fi =
Fi,ext +
Fi,int
Forces can be divided into 2 categories: external and
internal
Using Newtons 3rd law in the strong form, we can show that
where we define the total external torque w. r. t. point O.
Recall that Newtons 3rd law in strong form states that:
F ij =
F ji r ij
-
7/28/2019 Cm Lecture1
22/49
When a point particle moves, the force acting on the particle
moves too.
We define the work done by the force during an infinitesimal
displacement
During this infinitesimal path, the force can be considered as
constant.
Defining the kinetic energy of a point particle as
We can prove that when the particle moves from point A to B:
Warning: in general, the work done depends on each particular
path, notonly on the starting and final points.
Ki =1
2v2
Romain TeyssierContinuum Mechanics 2011
The kinetic energy theorem
Wi =
Fi
OMi
Ki =1
2
v2B v
2A
=WAB
-
7/28/2019 Cm Lecture1
23/49
Macroscopic approach using the center of mass.
We use the center of mass frame of reference.
We can prove that
The total kinetic energy is the sum of the kinetic energy of
translation andthe internal kinetic energy (or internal energy)
vi = vG + v
i
K=1
2Mv
2
G +Kint
Kint = 1
2mi (v
i)2
K=
Ki =
1
2
miv2
i
Romain TeyssierContinuum Mechanics 2011
Kinetic energy for systems
-
7/28/2019 Cm Lecture1
24/49
Again, we decompose the total force on each particle into
Fi =
Fi,ext +
Fi,int
K= KB KA
= WAB(Fext) + WAB(Fint)
Kint =WAB(Fint)
Romain TeyssierContinuum Mechanics 2011
The kinetic energy theorem for systems
We can show that the difference in kinetic energy between point
A and B is
Warning: in general, the work of internal forces is not
zero.
For an isolated system, we have:
-
7/28/2019 Cm Lecture1
25/49
F = gradU = U F =
Ux
, Uy
, Uz
Wi
=
F
i
OM
i
= U x = dU
WAB = (UB UA)
K+U = 0
Romain TeyssierContinuum Mechanics 2011
A particular case: force deriving from a potential
In electromagnetism or for gravity, the force is given by
The infinitesimal work done by the force for a small
displacement is
The work is now a differential form (like the kinetic
energy).
Integrating along the full path, we have
The total (mechanical) energy is now conserved), independently
on the exact path
f
-
7/28/2019 Cm Lecture1
26/49
F ij =
F ji
Wi =
Fji
OMi
Wj =
F ij
OMj
|MiMj | = cst
F ij
MiMj
Wi =
F ij
MiMj = 0
Romain TeyssierContinuum Mechanics 2011
A particular case: solid with zero deformation
Newtons 3rd law in weak form:
Compute work for both particle
Using Newtons law in strong form
and the no deformation assumption
We can show that
For a non deforming solid, the work of internal forces is
zero.
Ri id b d ti
-
7/28/2019 Cm Lecture1
27/49
d
dt
MiMj = vj vi = 0
X =
X
v i =
v 0 +
OMi
Romain TeyssierContinuum Mechanics 2011
Rigid body motions
Can we define a particular type of motion that preserve the
rigidity of the body ?
Trivial case: uniform velocity. vi= v
G
We require any orthonormal basis in the body to be preserved
(proof).
X=A
XWe then look for a general linear transform such as
We obtain that the matrix A is a rotation, defined by the
rotation vector
Rigid body motions are then defined by
W k d b i id b d di l t
-
7/28/2019 Cm Lecture1
28/49
OMi =
v it
OMi
t=
F i v i
W
t =
F i
v 0 +
F i
OMi
W
t=
F v 0
TO
Romain TeyssierContinuum Mechanics 2011
Work done by a rigid body displacement
We consider an infinitesimal displacement from a rigid body
velocity field.
The work per unit time for each particle is
The total work integrated over the body is
After some calculation, we get the following simple relation
(proof)
We immediately see that if the net force and the net torque are
both zero, thetotal work of the rigid body is zero.
For internal forces, Newton thirds law gives us zero net force
and torque(proof).
F di t t ti h i
-
7/28/2019 Cm Lecture1
29/49
So far, we can treat our system as a set of point particles, or
a an ensembleof volume elements.
We can identify with
Replace everywhere
In Cartesian coordinates:
In cylindrical coordinates:
In spherical coordinates:
mi
Xi =
XdV
dV = dr rd r sin d
dV = dr rd dz
Romain TeyssierContinuum Mechanics 2011
From discrete to continuum mechanics
mi dV
V= x y z
Wh t t l d i t l f ?
-
7/28/2019 Cm Lecture1
30/49
Romain TeyssierContinuum Mechanics 2011
What are external and internal forces ?
The most important step: define properly the system.
An internal force can become external to the system, depending
on how thesystem boundaries are chosen.
2 types of forces:
- body, volume, long distance forces such as gravity or
electromagnetic forces
- contact, short-range forces such as atomic or molecular bounds
in crystals.Usually, internal forces are of the second kinds.
Ch i l b d i lid d li id
-
7/28/2019 Cm Lecture1
31/49
U = UR + UA = 4U0
r0
r
n
r0
r
m
Romain TeyssierContinuum Mechanics 2011
Chemical bounds in solids and liquids
Strong atomic bounds in crystal structure such as
glasses, concrete, metals. Resistant to compressionand
shear.
Weak chemical bounds in liquids or rubbers(hydrogen, Van der
Waals interaction). Resistant tocompression only.
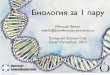
In the general case, the binding energy isdescribed by a
Lennard-Jones potential (usuallyone considers n=12 and m=6).
Equilibrium state for interatomic separation .requ 1.12r0
R t i f i L d J t ti l
-
7/28/2019 Cm Lecture1
32/49
Close to equilibrium, the bounds act as a spring with a
fixedspring constant
The value of the spring constant is related to the
atomicmicroscopic properties of the material by
F(r) =
U
r
U
r2 (r
requ)
k U0
r20
Romain TeyssierContinuum Mechanics 2011
Restoring force in Lennard-Jones potentials
Atomic forces are derived as gradient of the potential
energy
F = k0x
From microscopic to macroscopic forces
-
7/28/2019 Cm Lecture1
33/49
We want to move away from the atomic bound, microscopic
view.
Lets consider a material of section S.
The number of atomic bounds on the surface is
The total macroscopic force acting on the surface is
If we define as in the following the force surface density
and the relative elongation ,
we obtain the Young modulus, defined by .
The Young modulus is homogeneous to a pressure
(energy/volume).
EU0
r30
Romain TeyssierContinuum Mechanics 2011
From microscopic to macroscopic forces
S
N S
r20
F =
Fi S
r20
k0(r r0)
= F/S = (r r0)/r0
E= /
Typical values for the Young modulus
-
7/28/2019 Cm Lecture1
34/49
Romain TeyssierContinuum Mechanics 2011
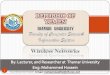
Typical values for the Young modulus
Bound type k0 (N/m) E (GPa)
C-C bound (diamond,carbon nanotube)
180 1000
Ionic bound (Na-Cl) 10-20 30-70
Metallic bound (Cu) 15-40 30-150
Hydrogen bound (H20) 2 8
Van der Waals 1 2
Rubber 1,00E-03 0.01-0.1
Stress field
-
7/28/2019 Cm Lecture1
35/49
V
gdV+
S
TdS=
Fext
T is the stress field of stress vector: it is a force surface
density on the bodysurface and/or on any surface cut through the
body.
In full generality, T is a function of the position on the
surface, but it alsodepends on the unit vector normal to the
surface. The stress vector depends onthe orientation of the surface
with respect to some frame of reference.
T(M, n)
Romain TeyssierContinuum Mechanics 2011
Stress field
A body in mechanical equilibrium must have no net forceand no
net torque. External forces are of 2 kinds: bodyforce (gravity) and
surface forces.
Surface forces are in fact internal (contact) forces acting on
the surface.
Stress tensor and Cauchys theorem
-
7/28/2019 Cm Lecture1
36/49
n1 =MBC
SABCn2 =
MAC
SABCn3 =
MAB
SABC
S
TdS = 0
T(M, n)SABC +
T1(M,x1)SMBC +
T2(M,x2)SMAC +
T3(M,x3)SMAB = 0
T(M,x) =
T(M, x)
T(M, n) = T1(M, x1)n1 +
T2(M, x2)n2 +
T3(M, x3)n3
T i = (1i,2i,3i)
T(M, n) = n
Romain TeyssierContinuum Mechanics 2011
Stress tensor and Cauchys theorem
We consider a small volume element in mechanicalequilibrium. For
sake of simplicity, we consider thefollowing tetrahedron, sharing
three faces with aCartesian frame.
The normal to the fourth face has coordinates
Applying Newtons first law
Applying Newtons third law
we get the general result:
We define the stress tensor as
In matrix form, we have
Stress tensor components
-
7/28/2019 Cm Lecture1
37/49
Consider a face perpendicular to the x-axis
The stress vector is
The first normal component corresponds to tension
or compression along the normal to the face.
The other 2 components are tangential to the normal.
They correspond to shear forces.
Romain TeyssierContinuum Mechanics 2011
Stress tensor components
=
11 12 13
21 22 23
31
32
33
n = (1, 0, 0)
T = (11,21,31)
11 > 0
11 < 0
=
xx xy xz
yx yy yz
zx
zy
zz
or
Symmetry of the stress tensor
-
7/28/2019 Cm Lecture1
38/49
Similarly, from the other component of the torque, we obtain the
generalresult that the stress tensor must be symmetric.
or
We get for the z-component of the total torque
=
11 12 13
21 22 23
31
32
33
=
xx xy xz
yx yy yz
zx
zy
zz
S
r
TdS= 0
Romain TeyssierContinuum Mechanics 2011
Symmetry of the stress tensor
Now consider a cube in mechanical equilibrium,
small enough so that the stress tensor is constant
The stress field formula ensures zero net force.
We now require zero net torque around the center.
or
21L3 12L
3= 0
ij = ji =t
General case
-
7/28/2019 Cm Lecture1
39/49
T(M, n)
T1(M, x1)n1
T2(M, x2)n2
T3(M, x3)n3 =VMABC
SABCdv
dt g
=1
3H
dv
dt g
H 0
T(M,n)SABC +
T1(M,x1)SMBC +
T2(M,x2)SMAC+
T3(M,x3)SMAB
= VMABC
dv
dt g
Romain TeyssierContinuum Mechanics 2011
General case
For the tetrahedron with external body forces and
acceleration:
Dividing by the surface of the base, we get:
We now go to the continuum limit and shrink the tetrahedron to a
point
and we recover the previous result.The same apply for the cube
and the zero torque constraint (exercise).
This property holds because internal forces are surface/contact
forces,
for which relevant quantity is the stress, or the force per unit
surface.
Invariant properties of the stress tensor
-
7/28/2019 Cm Lecture1
40/49
The stress tensor thus depends on 6 independent quantities, the
3 eigenvalues and
the 3 Euler angles of the local rotation matrix to the
eigenvectors.
The 3 eigenvalues are solutions of
The 3 coefficients of this polynomial form are invariants: they
are the same in anyframe of reference.
Another set of invariants is more commonly used:
I
3= Tr(
3)I
2= Tr(
2)I
1= Tr()
I1 =
1 +
2 +
3 = Tr(
)I2=
12+
23+
13
=t
P D P D = diag(1,2,3)
I3 = 123 = Det()
Romain TeyssierContinuum Mechanics 2011
Invariant properties of the stress tensor
The stress tensor is an intrinsic quantity, independent on the
frame of reference.
The values of the components depend of the chosen frame.
Since the stress tensor is symmetric, we know it has real
eigenvalues and there isalways an orthonormal basis where the
stress tensor is diagonal.
3 I1
2+ I2 I3 = 0
Isotropic and deviatoric stress
-
7/28/2019 Cm Lecture1
41/49
Note that the isotropic stress is equal to the invariant .
In fluid mechanics, the isotropic stress is usually referred to
as the hydrostatic orthermal pressure.
ij =1
3Tr()ij + ij
p = 1
3Tr()
Romain TeyssierContinuum Mechanics 2011
Isotropic and deviatoric stress
The stress tensor is decomposed into the sum of an isotropic
tensor calledhydrostatic stress and a symmetric, with zero trace
tensor called anisotropic ordeviatoric stress.
A positive pressure corresponds to a compression.
The deviator has the same eigenvectors than the stress
tensor.
It depends now only on 2 invariants, plus the 3 Euler
angles.
I1
The divergence theorem
-
7/28/2019 Cm Lecture1
42/49
S
(v n) dS =
V
v
dV = 0
Romain TeyssierContinuum Mechanics 2011
The divergence theorem
The volume total of all sink and sources is equal to the net
flow across the boundary.
It comes from Stokes theorem (not trivial).
We can work out simple examples in 1D and in a cubical region in
3D.
Using conformal mapping techniques, we can extend this to
arbitrary shaped regions.
Equilibrium equation
-
7/28/2019 Cm Lecture1
43/49
S
TxdS=
V
xdV
x =
xx
xy
xz
y =
yx
yy
yz
z =
zx
zy
zz
S
TxdS=
V
xdV
+F = 0
+
F =
dv
dt
Romain TeyssierContinuum Mechanics 2011
Equilibrium equation
We start with the total net force being zero. We define the
following vectors
We treat each component of the force separately:
Using the divergence theorem, we get:
Since this is valid for arbitrary volumes, we obtain the
equilibrium equation
S
TdS+
V
FdV = 0
The stress vector component is given by Tx = x n
From Newtons 2nd law, we get similarly the dynamical equilibrium
equation
Deformations
-
7/28/2019 Cm Lecture1
44/49
A small region Q0 around the initial position is deformedin a
new region Q around the final position.
To compute the magnitude of the deformation, we usethe gradient
operator on each component:
We define the initial (unperturbed) positions of the body
particles as
and the final positions after deformation as .
We have a mapping between the final and initial positionx =
x1(
X)x2(
X)
x3(
X)
dxi =xi d
X =
xi
X
dX
gij =xi
Xjdx = g d
X
u = x X
Romain TeyssierContinuum Mechanics 2011
Deformations
X =
OP0
x =
OP
Gathering all components, we obtain de gradient tensor
Usually, instead of the position, we use the displacement field
defined by
Similarly, we have the gradient operator where .du = G d
X G = g I
Small deformations
-
7/28/2019 Cm Lecture1
45/49
The length of the infinitesimal vector is modified onlyby pure
deformation, and should not change during rigid solid motions.
We have . .
Size changes are due to a symmetric tensor characterizing true
deformations.
Lets now consider small perturbation such as .
We can neglect the quadratic term and we obtain
103
=
tG+G
2
Romain TeyssierContinuum Mechanics 2011
Small deformations
L2
= d X d X =t
d Xd X
l2 =t dxdx =t d Xtg gd X= L2 +t d XtG + G +t G G
d X
l = L (1 + )
td X
L
tG+G
2
d X
L
For most material, typical applications deal with small
deformations
We are in the so-called elastic regime.The symmetric part of the
gradient tensor is called the strain tensor.
The strain tensor
-
7/28/2019 Cm Lecture1
46/49
The displacement field infinitesimally close to point Po is
given by
In the general case, we can decompose the gradient tensor into a
symmetric and anantisymmetric part .
ij =1
2
ui
Xj+
uj
Xi
ij =
1
2
ui
Xj
uj
Xi
Romain TeyssierContinuum Mechanics 2011
The strain tensor
G = +
= G
t
G2
= G+t
G
2
and
We have and .
The antisymmetric part has only 3 independent components.
It is a rotation matrix that can be rearranged as
The symmetric part has 6 independent components (like the stress
tensor).
This is the strain tensor and it corresponds to pure
deformations.
rigid body motion deformation or strain
du = d
X
u = u0 + d
X+ d
X
Strain tensor components
-
7/28/2019 Cm Lecture1
47/49
Romain TeyssierContinuum Mechanics 2011
Strain tensor components
=
11 12 13
21 22 23
31 32 33
=
xx xy xz
yx yy yz
zx zy zz
or
Consider a unit vector parallel to the x-axis
The displacement vector is
The displaced vector is therefore
Its length is given byThe normal component affects the length of
the line element.
The corresponding strain is called extension or contraction.
The angle between the 2 vectors is given byIt is equal to the
tangential component.
The corresponding strain is called distortion.
u = (xx, yx, zx)
N = (1, 0, 0)
n = N+ u = (1 + xx, yx, zx)
|n| =
(1 + xx)2
+ 2yx +
2zx
1 + xx
xx
tan =
2yx
+ 2zx
(1 + xx)2 + 2yx + 2zx
tx =
2yx +
2zx
Properties of the strain tensor
-
7/28/2019 Cm Lecture1
48/49
Since the strain tensor is symmetric, invariance properties of
the stress tensorare also valid here.
Similarly, the strain tensor can be decomposed into an isotropic
tensor and adeviator tensor.
The isotropic part is an frame invariant quantity, equal to the
divergence of thedisplacement field. It measures the relative
variation of the volume element atconstant shape
The anisotropic tensor has zero trace. It measures the change of
shape atconstant volume.
=
11 12 13
21 22 23
31 32 33
=
xx xy xz
yx yy yz
zx zy zz
ij = 13Tr()ij + ij
Tr() =u1
X1
+u2
X2
+u3
X3
= u =
dV
V
Romain TeyssierContinuum Mechanics 2011
Properties of the strain tensor
or
Summary for stress and strain tensors
-
7/28/2019 Cm Lecture1
49/49
du = d
X
Tr() = u =
dV
V
Tr() = 3p
Summary for stress and strain tensors
=G+t G
2
ij =1
2
ui
Xj
+uj
Xi
T(M, n) = n
+
F =
dv
dt
ij =1
3Tr()ij + ij
ij =1
3Tr()ij + ij
Stress field Displacement field
Gradient tensorDynamical equilibrium
Isotropic/deviatoric stress
Hydrostatic pressure
Isotropic/deviatoric strain
Compressibility