Embed Size (px)
Citation preview

上海天浔智能科技有限公司 DigiPOTTM
TinSun Tech Shanghai Co.,Ltd.
专业的伺服比例控制方案 - 1 - E-mail: [email protected]
DigiPOTTM
Motion Control System
电液伺服数字控制器
MC 2000A系列
(专利号:CN2010101447599)
目 录: l 产品特点及概述 Page 2
l 原理说明 Page 2-4
l 硬件结构及说明 Page 5-6
l 端子接线及定义 Page 7
l 参数调整 Page 7-16
l 电气技术参数 Page 16-18
l 外形尺寸 Page 18
技术支持:021—51259298 http://www.digipot.com.cn/

上海天浔智能科技有限公司 DigiPOTTM
TinSun Tech Shanghai Co.,Ltd.
专业的伺服比例控制方案 - 2 - E-mail: [email protected]
1. 产品特点及概述
MC2000A 系列电液伺服数字控制器是一种适用于高动态响应闭环运动控制的简约集
成电子模块,可广泛应用于电液伺服运动控制或电机伺服运动控制等工业自动控制应用方
案。控制器采用新一代 32Bit高性能嵌入式微处理器作为运算内核,可达 60MIPS/S的程
序指令运行速度,嵌套向量中断响应异常迅速,外围接口设备丰富,抗干扰性能优异。控
制器的设计源自数字模拟混合电路设计规则,采用高密度 SMT 表面贴装电子器件和多层
复合 PCB工艺设计的电路板,由经验丰富的软、硬件高级工程技术人员研发而成。
MC2000A 系列电液伺服数字控制器核心算法为特别优化的改进型 PID 控制算法,可
在线动态调整运动控制参数,PID数据运算处理速度达 1250次/秒。多功能信息显示高亮
LED数码管及用户菜单操作按键,满足现场工作人员独立调试方便,通过微型 RS232串行
通讯接口与 PC 计算机实现人机友好交互式界面参数设定和数字控制器的固件升级操作。
内部的非易失数据存贮器保存的用户设定参数可确保十年数据不丢失。控制器还设有可以
快速恢复启动的看门狗监控定时器,防止意外干扰造成控制器死机导致运动控制处于失控
的危险情况。
MC2000A 系列电液伺服数字控制器采用先进的 PID 数字处理算法,灵活全面的参数
设定功能支持控制器可以适用于电液伺服控制机械的各类应用场合。下面的框图描述了控
2.原理说明 MC2000A 系列电液伺服数字控制
器不同于普通的 PLC 可编程数字控制
器,它仅对单轴运动系统处理操作,而
不对机器的其他动作进行处理,它是属
于分布型控制系统中的一个单元控制系
统。因此,控制器的所有功能都是基于
这种设计理念,所以在稳定性和控制精
度等方面有更加突出的表现。MC2000A
可实现单轴运动的位移、速度、力(压
力)进行独立闭环控制,也可以实现位
移/压力、位移/速度、压力/速度的复合
闭环伺服控制。适用于非线性复杂系统
和对动态响应速度有较高要求的机、电、
液综合应用的运动控制系统。

上海天浔智能科技有限公司 DigiPOTTM
TinSun Tech Shanghai Co.,Ltd.
专业的伺服比例控制方案 - 3 - E-mail: [email protected]
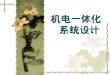
制器内部 PID算法模块的基本原理。
模块内部除了包含了 PID 经典控制的比例(P)、积分(I)、微分(D)控制环节,还增加了
可改善系统稳定性和动态响应快速性的反馈信号微分预置处理(FD)、指令信号前馈控制
(PF)、输出信号低通滤波(LPF)等先进控制算法。每一个控制子模块都有一些可以由用户设
定的参数用来调整其控制环节作用大小和性能,这样可以使整个闭环系统的参数变化达到
最大程度的可调节性能而又相对操作简单便利,非常适合现场调试工程师的使用操作。
图 1:P.I.D.模块功能原理框图
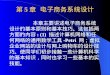
MC2000A 系列电液伺服数字控制器具有多用途数字处理结构,可支持控制器实现双
重复合闭环控制应用的复杂情况。控制器内部包含两个独立的 PID控制模块,每个模块对
一种运动实现闭环控制,两个模块的处理结果由交替控制模块(Alternate)自动识别,并转换
控制信号,可实现两种闭环运动的无缝切换控制状态。两个指令信号的输入端设计有带 S
曲线平滑处理的斜坡处理函数子模块,适用于要求控制动作柔顺的情况。控制器输出的前
端还设计有能够补偿带有正遮盖量的电液比例阀非线性调节特性的补偿控制函数,使得控
制器能够充分发挥电液比例阀的特性,提高比例控制的分辨率和线性度。
控制器还特别具备颤振信号发生功能,可调节频率、幅值和函数波形的颤振信号被叠
加在输出信号上,能有效减少滑阀类电液比例阀的滞环现象,可更进一步提高伺服执行器

上海天浔智能科技有限公司 DigiPOTTM
TinSun Tech Shanghai Co.,Ltd.
专业的伺服比例控制方案 - 4 - E-mail: [email protected]
的控制精度。
图 2:复合控制结构框图
MC2000A系列电液伺服数字控制器具备多种传感器信号接口,除了标准的 0~10V模
拟电压和 4~20mA电流环信号,还支持增量式光栅传感器和 SSI数字接口的磁致伸缩位移
传感器 SSI等数字接口,处理器支持串行异步通讯接口,可以实现控制器与上位机的通讯
连接,上位机可直接发送数字运动指令,和采集传感器实际值数据。控制器的附属处理函
数,可以实现各种接口信号的增益、偏置的调节。
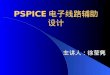
3.硬件结构
控制器硬件结构框图如图 3所示。

上海天浔智能科技有限公司 DigiPOTTM
TinSun Tech Shanghai Co.,Ltd.
专业的伺服比例控制方案 - 5 - E-mail: [email protected]
图 3:硬件结构框图
l 电源
控制器采用工业控制现场普遍适用的标准 24V直流供电。选用的供电系统应尽量采用
纹波噪声小、电压稳定的直流电源模块。控制器内部的电源变换电路中设置了吸收尖峰浪
涌电压的瞬态抑制电路,最大限度保护了控制器不会受到尖峰浪涌电压的冲击。电源极性
保护电路可有效防止 24V电源极性反接造成的损毁。内置的自恢复过流保险丝保证了控制
器稳定安全的工作运行。
l 显示和按键
控制器采用了 4位 LED七段数码管作为基本信息显示设备,并配置了 4个轻触按键作
为操作输入设备。控制器的操作系统软件赋予了用户能够利用它们对控制器进行最基本的
操作。利用控制器上的 RS232串行通讯接口和界面友好的 PC机专用调试监控软件,可以
对控制器进行全面细致的参数设定监测操作。
l 串行通讯接口
控制器含有RS232和RS485两个异步串行通讯接口。RS232接口安装于控制器面板上,

上海天浔智能科技有限公司 DigiPOTTM
TinSun Tech Shanghai Co.,Ltd.
专业的伺服比例控制方案 - 6 - E-mail: [email protected]
用于与 PC机调试和监控。RS485接线端子与 Q0、Q1、A0、A1端子复用,全双工通讯模
式,可用于与上位中央控制器的远程通讯操作。
l 模拟信号 A/D输入和 D/A输出
MC2000A配备四路模拟信号 A/D转换通道输入。
A0、A1 是单端输入信号接口,可用于 0~10V 或 4~20mA 模拟信号输入。其 A/D
转换精度为 12 位分辨率,采样速度可达 4KS/S。同时 A0、A1 也可以复用为 RS485 的
RS485_RX-、RS485_RX+。
A2+、A2-及 A3+、A3-是差分输入信号接口,输入范围 0~±10V或 4~20mA。
其A/D转换精度为 16位分辨率,采样速度可达 1KS/S。SO模拟输出通道,信号范围0~±10V
或 4~20mA。其 D/A转换精度为 14位分辨率,转换速度可达 1KS/S。
l SSI同步串行数字信号接口
控制器的 SSI同步串行接口适用于带 SSI接口的磁致伸缩位移传感器,满足了绝对输
出编码器对 SSI标准的所有要求。SSI接口的位置值以 24/25/26位编码模式,可以接收二
进制或格雷码数据高速传输至控制系统。SSI 的一个主要功能为同步数据转换,在一个闭
环控制系统里,同步是十分容易做到的。控制器产生的一个时钟脉冲链用来开启传感器数
据:位置数据一位一位的随着传感器接收到的每一个时钟脉冲传送至控制器。
Q0、Q1可复用为 SSI的时钟输入(SSI_CK-、SSI_CK+),A0、A1复用为 SSI的数
字输入端(SSI_DA-、SSI_DA+),其通讯模式符合 RS485标准。
l 高速数字量信号输入输出接口
控制器带有四路复用功能的高速数字量信号输入 D0、D1、D2、D3和两路开关量输出
Q0、Q1。复用功能根据用户需要在软件上来实现。
D0~D2 可以作为光电隔离电气特性的数字输入接口,光隔绝缘强度达 3000V。数字
量开关信号响应时间仅 0.8uS,可适应高速脉冲信号边沿的捕获触发。数字量信号电平可
配置为 24V工业标准或 5VTTL标准。
D0~D2也可接收编码器信号,D0、D1、D2分别为编码器的A相、B相、Z相。
D3可以作为数字信号输入也可以作为输出端 SO的使能信号。
Q0、Q1 数字输出接口为光隔继电开关特性,光隔绝缘强度达 1500V。数字量输出信
号呈现通、断开关状态,导通电阻低至 2.5欧姆,开关最大负荷电流±400mA。
Q0、Q1 可复用为 SSI 的时钟输入(SSI_CK-、SSI_CK+),也可复用为 RS485 的
(RS485_TX-,RS485_TX+)。

上海天浔智能科技有限公司 DigiPOTTM
TinSun Tech Shanghai Co.,Ltd.
专业的伺服比例控制方案 - 7 - E-mail: [email protected]
4. 端子接线及定义
图 4:端子定义
注意:
①模拟信号输入 A0,A1以及模拟信号输出 SO均以 GND作为信号参考零点,模拟信号输
入 A2,A3为差分输入方式。控制器默认输入信号端子为 A2,反馈信号端子为 A3,若
要改动指令信号、反馈信号的接线端子号,则需在 ChS通道选择中选择对应。
COM② 是数字输入输出公共端,与电源 GND隔离。 ③D3默认为使能控制,参考地为 COM端。也可以作为数字量输入 3来使用。
④控制的输入信号、输出信号是电压型还是电流型,用户是不可更改的,采购之前请
咨询本公司技术人员。
5. 参数调整
MC2000A系列电液伺服数字控制器设计有三位 LED数码管显示和四个操作按键,四
个按键定义分别为 1:Esc(显示),2:Mode(菜单),3:Up(控制指令值),4:Down(反
馈输入值)。通过这四个按钮对控制器进行参数调整。
① 显示配置
当控制器通电后,LED数码管逐一扫描点亮并自检。自检完成后出厂默认显示设定温
度值。按Mode键进入设定菜单状态,按 Up键或 Down键有 DSP显示设定、PID设定、
1:+P(电源+24V)
2:D0(数字量输入 0或编码器 A相)
3:D1(数字量输入 1或编码器 B相)
4:D2(数字量输入 2或编码器 Z相)
5:D3(输出使能控制)
6:Q0(开关量输出 0或 SSI_CK-或 RS485_TX-)
7:Q1(开关量输出 1或 SSI_CK+或 RS485_TX+)
8:COM(公共端)
9:A0(模拟量输入 0或 SSI_DA-或 RS485_RX-)
10:A1(模拟量输入 1或 SSI_DA+或 RS485_RX+)
11:A2+(模拟量输入 2+)
12:A2-(模拟量输入 2-)
13:A3+(模拟量输入 3+)
14:A3-(模拟量输入 3-)
15:SO(模拟量输出)
16:GND(电源地及模拟量信号地)

上海天浔智能科技有限公司 DigiPOTTM
TinSun Tech Shanghai Co.,Ltd.
专业的伺服比例控制方案 - 8 - E-mail: [email protected]
SIG信号特征设定、CFG模式配置四种选择,选定 DSP显示设定状态,再按Mode键进入
其内容选择,按 Up键或 Down键翻阅内容,按Mode键确定。按 Esc键表示退出当前菜单
进入上一级菜单,重复按 Esc键可以退回初始位置。可根据用户需要选择显示内容,表格
如下:
参数设定 显示内容
IN0:输入信号 0值(0.1%)
IN1:输入信号 1值(0.1%)
IN2:输入信号 2值(0.1%)
IN3:输入信号 3值(0.1%)
SSI:SSI信号输入值(0.1%)
ECd:光电编码器输入值(0.1%)
dIF:输入 0与输入 1之间的差值(0.1%)
OUt:输出信号值(0.1%)
dSP显示设定
tEP:芯片温度值( )℃
对以上参数详细解释如下:
IN0:输入到控制器的信号,对应的是 A0端子输入,信号范围为 0~10V。显示的是输入
满量程的百分比,如输入为电压信号,范围为 0~10V,显示的是 50.0,即实际输
入值为 10/100%50.0%=5V;若输入电压范围为 0~5V,则需要调整模拟信号 IN0的
输入范围为 2,显示的是 50.0即实际输入值为 10/100%×50.0%×0.5=2.5V;A0端子不
接收 4~20mA信号。
IN1:输入到控制器的信号,对应的是 A1 端子输入,信号范围为 0~10V。显示值的计算
同于 IN0,也不接收 4~20mA信号。
IN2:输入到控制器的信号,对应的是 A2+、A2-差分输入端子,信号范围-10V~+10V
或 4~20mA。显示的是输入满量程的百分比,电压输入信号的计算同于 IN0,如输
入为电流信号时,显示 0 对应的是 12mA,若显示的是 50.0,即实际输入值为 12+
8/100%×50.0%=16mA。显示为-50.0,则 12-8/100%×50.0%=8mA。
IN3:输入到控制器的信号,对应的是 A3+、A3-差分输入端子,信号范围-10V~+10V
或 4~20mA。显示同于 IN2。
OUt:输出信号 SO值的显示,显示的是输出满量程的百分比,信号范围是-10V~+10V
或 4~20mA,显示值计算同于 IN2、IN3。
SSI:SSI接口信号的输入值,适用于用户使用 SSI接口传感器反馈,对应的接线端子为复

上海天浔智能科技有限公司 DigiPOTTM
TinSun Tech Shanghai Co.,Ltd.
专业的伺服比例控制方案 - 9 - E-mail: [email protected]
用的 Q0、Q1、A0、A1,显示的值是输入满量程的百分比-100%~+100%。用户的
SSI信号值需要与控制器信号相互匹配,首先要知道传感器的数据传输格式是 24 位
或 25位、分辨率,使用行程,以及油缸的行程。根据用户的要求可以调整增益参数
GSSI,使显示 100%对应的是 32768二进制码,GSSI=327268×传感器分辨率/油缸行
程。
ECd:光电编码器输入值,显示的是输入满量程的百分比。对应的是复用端子为 D0、D1、
D2,若光电编码器输出是差分输出,则需在光电编码器和控制器之间增加差模信号
转换器,根据用户要求,我们提供技术方案。
dIF:输入信号 0与输入信号 1的差值,即 IN0-IN1的差值信号,显示的值是输入满量程的
百分比-100%~+100%。适合使用 PA-PB压力传感器反馈实现精确力控制的应用。
tEP:显示的是控制器主芯片的温度,温度≥75℃时,闪烁提醒,用户应让控制器所在机柜
通风降温。若温度还是无法降低,可能是控制器有故障,请及时联系我们。
② 控制模式设定
MC2000A控制器具有多种控制模式,用户可根据需要选用其中一种控制模式。
单闭环控制的设定:按Mode键选择CFG模式配置按Mode键确定,翻阅Up键或Down
键“设置内容”选择 CtR(控制模式)按Mode键确定,选择 S_CL.(单环路控制)确定。
双闭环控制的设定:同上设置,而选择 d_CL.(双环路控制)确定。
配置内容如下表格所示:
参数设定 设置内容 内容描述
d_CL.:双环路控制 CtR:控制模式
S_CL.:单环路控制
Cd_1:指令 1设定(内部参数有 IN0、IN1、
IN2、IN3、INt)
Fb_1:反馈 1设定(内部参数有 IN0、IN1、
IN2、IN3、SSI、ECd、dIF)
Cd_2:指令 2设定(内部参数有 IN0、IN1、
IN2、IN3、INt)
ChS:通道选择
Fb_2:反馈 2设定(内部参数有 IN0、IN1、
IN2、IN3、SSI、ECd、dIF)
CFG:模式配置
REF:参考信号设定 RF1:控制环路
1内部参考
R_0~R_7:内部固定参
考值 0~7

上海天浔智能科技有限公司 DigiPOTTM
TinSun Tech Shanghai Co.,Ltd.
专业的伺服比例控制方案 - 10 - E-mail: [email protected]
CON:串口控制
PIN:D0~D2控制
R_0~R_7:内部固定参
考值 0~7
CON:串口控制
RF2:控制环路
2内部参考
PIN:D0~D2控制
IRF:内部参考
预存值设定
R0~R7:内部参考值 0~
7的预存值
EN_1:误差报警使能控制
Eth1:误差报警门限
EIt1:误差报警累计时间常数
EN_2:误差报警使能控制
Eth2:误差报警门限
ERR:故障设定
EIt2:误差报警累计时间常数
对上述参数的详细解释如下:
CtR:控制模式的选择,控制器默认为 S_CL.单环路控制,只有在复合闭环控制时才用
双闭环控制。同时,选择单环路控制,PId1 可调节参数,PId2 的参数是屏蔽状
态;选择双环路控制,PId1、PId2都可调节参数。
ChS:通道选择,用户可根据实际需要来选择控制器输入通道的,指定某通道为实际
的输入端和反馈端。控制器默认A2端子为 PId1的指令信号输入,A3端子为 PId1
的反馈信号输入;A0端子为 PId2的指令信号输入,A1端子为 PId2的反馈信号
输入。当控制器为单环路控制时,只能调节 Cd_1、Fb_1参数。
REF:参考信号参数设定。只有当用户选择内部信号输入(INt)的时候才有效。内部
参考信号有 3种方式获得:
Ⅰ、用户根据 D0~D2端子外接高低电平,组合成 8组二进制编码,对应 R_0~
R_7,R_0到 R_7的预设值可以在控制器内部(IRF菜单)设定,作为内部参考
指令信号用。
Ⅱ、用户可以通过串口通讯协议(通讯协议内容另外提供),由上位机来设定
内部参考指令信号值。
Ⅲ、PIN选择,根据用户接入的 D0~D2高低电平二进制编码信号,采用 3-8译
码方式选择 R_0~R_7 的预设值作为参考信号,PIN 选择方式适合于利用 PLC
发出的开关量作为系统闭环控制的指令信号。

上海天浔智能科技有限公司 DigiPOTTM
TinSun Tech Shanghai Co.,Ltd.
专业的伺服比例控制方案 - 11 - E-mail: [email protected]
ERR:故障报警设定。EN_1:环路 1的误差报警使能控制,1表示使能,0表示禁能,
默认值为 0。Eth1为环路 1的误差报警门限值设定,默认值 10%。EIt1为环路 1
的误差报警累计时间常数,默认为 50。EN_2、Eth2、EIt2为环路 2的报警参数
设定。当环路 1的误差报警产生时,相应的 Q0开关量输出为高阻截止状态,正
常时则 Q0 开关量输出为低阻导通状态。当环路 2 的误差报警产生时,相应的
Q1 开关量输出为高阻截止状态,正常时则 Q1 开关量输出为低阻导通状态。在
故障报警发生时,LED 显示故障代码,以便区分故障产生的原因。故障代码列
表如下:
故障代码 故障原因 故障代码 故障原因
E0 环路 1误差超上限,环
路 2正常
E4 环路1误差超上限且环路
2误差超上限
E1 环路 1误差超下限,环
路 2正常
E5 环路1误差超下限且环路
2误差超上限
E2 环路 2误差超上限,环
路 1正常
E6 环路1误差超上限且环路
2误差超下限
E3 环路 2误差超下限,环
路 1正常
E7 环路1误差超下限且环路
2误差超下限
③ 信号参数调整
同①步骤进入 SIG信号特征设定状态,按 Up键或 Down键翻阅可设定内容,按Mode
键选定其中一内容,再按 Up键或 Down键。
参数设定 设置内容 参数及范围
GIN0:模拟输入 0信号范围(0~200%)
GIN1:模拟输入 1信号范围(0~200%)
GIN2:模拟输入 2信号范围(0~200%)
GIN3:模拟输入 3信号范围(0~200%)
GSSI:数字输入 SSI信号(0~200%)
GECd:数字输入 ECd信号(0~200%)
RNG:信号范围设置
GREF:模拟输出信号范围(0~200%)
bIN0:输入 0信号偏置(-50.0%~50.0%)
SIG信号参数
bIS:偏置功能设置
bIN1:输入 1信号偏置(-50.0%~50.0%)

上海天浔智能科技有限公司 DigiPOTTM
TinSun Tech Shanghai Co.,Ltd.
专业的伺服比例控制方案 - 12 - E-mail: [email protected]
bIN2:输入 2信号偏置(-50.0%~50.0%)
bIN3:输入 3信号偏置(-50.0%~50.0%)
bSSI:输入 SSI信号偏置(-50.0%~50.0%)
bECd:输入 ECd信号偏置(-50.0%~50.0%)
bOUt:输出信号偏置(-50.0%~50.0%)
bC_P:正向死区补偿偏置(0%~50.0%)
bC_N:负向死区补偿偏置(0%~50.0%)
dS_P:正向调节增益(0%~99.9%)
dbC:死区和非对称补
偿设置
dS_N:负向调节增益(0%~99.9%)
OFF:颤振关闭
SIN:正弦波
tRI:三角波 FUN:波形函数
SqU:方波
FRq:颤振频率选择(80~800Hz)
dth:颤振功能设置
aPL:颤振幅度(0~20.0%)
对上述参数的详细解释如下:
RNG:输入信号或输出信号范围设置,根据用户需要,可以调整输入信号的倍数,使得输
入信号与反馈信号相互匹配。
BIS:输入信号或输出信号偏置量的设置,当控制器的零位偏移了,就需要调整这类参数。
dbC:死区和非对称补偿参数设置。bC_P、bC_N为正向、负向死区补偿偏置的调整参数,
默认值为 0,用户只需调整控制器的死区偏置量就可以补偿比例阀的死区,可以替
代比例阀放大器的死区调整功能。dS_P、dS_N 为正向、负向调节增益参数,默认
值为 100%。调节不同的增益参数,用户可以补偿类似使用单出杆油缸的系统非对
称性增益问题,改善系统控制稳定性。
dth:颤振功能设置,默认为关闭。当用户使用比例伺服阀或精密控制,可以减小比例阀的
滞环效果,颤振信号的波形函数、频率和幅度则需要根据用户实际调试情况来选择。
④ 运动参数调整
MC2000A控制器可用于单闭环控制也可用于复合闭环控制。按Mode键进入运动参数
调整内容 PId1、RaP1、CLP1、PId2、RaP2、CLP2,翻阅用 Up或 Down 键,定位选择进
入“参数范围”按Mode键确认。位置、压力、速度的单闭环控制可以调整 PId1、RaP1、CLP1

上海天浔智能科技有限公司 DigiPOTTM
TinSun Tech Shanghai Co.,Ltd.
专业的伺服比例控制方案 - 13 - E-mail: [email protected]
参。复合控制如位移/压力、位移/速度、压力/速度,选择 PId1、RaP1、CLP1和 PId2、RaP2、
CLP2的双闭环参数调节,实现复合控制。
参数调节表格如下:
参数设定 设置内容 参数范围
PG_a:比例因数(0.1~50.0)
PG_1:第一段比例系数(0~200%)
PG_2:第二段比例系数(0~200%)
PG_3:第三段比例系数(0~200%)
Ph_1:第一级比例分界门槛(0~100%)
Ph_2:第二级比例分界门槛(0~100%)
Fd_C:反馈微分时间常数(0~99.9mS)
FL_C:反馈微分滤波常数(0~999mS)
IE_S:积分使能控制("1"使能,"0"禁能)
It_C:积分时间常数(0~9.99S)
Ih_0:积分限制门槛下界(0~100%)
Ih_1:积分限制门槛上界(0~100%)
dt_C:微分时间常数(0~99.9mS)
dL_C:微分滤波常数(0~999mS)
SG_1:前向通道第一段增益系数(0~200%)
SG_2:前向通道第二段增益系数(0~200%)
Sh_0:前向通道增益分界门槛(0%~100%)
Sb_0:前向通道偏置常数(-50.0%~50.0%)
OP_S:输出极性控制("1"同向,"0"反向)
OP_H:输出上限(-99.9%~99.9%)
PId1:环路 1参数
OP_L:输出下限(-99.9%~99.9%)
R_EN:斜坡使能("1"使能,"0"禁止)
R_St:S(平滑)曲线时间常数
R_PU:上升时间(0.01~9.99S)
R_Pd:下降时间(0.01~9.99S)
R_NU:上升时间(0.01~9.99S)
dyP参数设定
RaP1:斜坡 1梯度设置
R_Nd:下降时间(0.01~9.99S)

上海天浔智能科技有限公司 DigiPOTTM
TinSun Tech Shanghai Co.,Ltd.
专业的伺服比例控制方案 - 14 - E-mail: [email protected]
CLS:闭环 CLP1:环路 1控制
OPN:开环
PG_a:比例因数(0.1~50.0)
PG_1:第一段比例系数(0~200%)
PG_2:第二段比例系数(0~200%)
PG_3:第三段比例系数(0~200%)
Ph_1:第一级比例分界门槛(0~100%)
Ph_2:第二级比例分界门槛(0~100%)
Fd_C:反馈微分时间常数(0~99.9mS)
FL_C:反馈微分滤波常数(0~999mS)
IE_S:积分使能控制("1"使能,"0"禁能)
It_C:积分时间常数(0~9.99S)
PId2:环路 2参数
Ih_0:积分限制门槛下界(0~100%)
Ih_1:积分限制门槛上界(0~100%)
dt_C:微分时间常数(0~99.9mS)
dL_C:微分滤波常数(0~999mS)
SG_1:前向通道第一段增益系数(0~200%)
SG_2:前向通道第二段增益系数(0~200%)
Sh_0:前向通道增益分界门槛(0%~100%)
Sb_0:前向通道偏置常数(-50.0%~50.0%)
OP_S:输出极性控制("1"同向,"0"反向)
OP_H:输出上限(-99.9%~99.9%)
PId2:环路 2参数
OP_L:输出下限(-99.9%~99.9%)
R_EN:斜坡使能("1"使能,"0"禁止)
R_St:S(平滑)曲线时间常数
R_PU:正向加速时间(0.01~9.99S)
R_Pd:正向减速时间(0.01~9.99S)
R_NU:负向加速时间(0.01~9.99S)
RaP2:斜坡 2梯度设置
R_Nd:负向减速时间(0.01~9.99S)
CLS:闭环
dyP参数设定
CLP2:环路 2控制 OPN:开环

上海天浔智能科技有限公司 DigiPOTTM
TinSun Tech Shanghai Co.,Ltd.
专业的伺服比例控制方案 - 15 - E-mail: [email protected]
对上述参数的详细解释如下:
PG_a:比例因数,调整范围 0.1~50.0。系统默认值为 1.0,增加其值,可以增加系统的刚
度,闭环的响应速度增快,闭环误差会减小,但同时稳定性减弱。
PG_1、PG_2、PG_3、Ph_1、Ph_2:非线性比例系数调整参数,其中 PG_1、PG_2、PG_3
为分段比例系数,系统默认值为分别为 100%、80%、50%,Ph_1、Ph_2 为比例分
界门槛值,系统默认值分别为 5%、15%。当误差绝对值≤5%时,自动选择 PG_1
为 100%,即系统的比例值为 PG_a×PG_1;当 5%<误差绝对值≤15%时,自动选择
PG_2 为 80%,即系统的比例值为 PG_a×PG_2;当误差绝对值>15%时,自动选择
PG_3为 50%,即系统的比例值为 PG_a×PG_3。这样分段调整可以在误差比较大时,
减小闭环的增益,系统的超调量减小;而在误差比较小时,增大闭环增益,提高精
度。
Fd_C、FL_C:反馈信号微分预置处理参数,可改善系统稳定性和动态响应快速性。适用
于动态响应快的系统中,一般不需调整该参数。
IE_S:积分使能控制,1表示使能,0表示禁能,系统默认值为 0。积分使能的应用可消除
闭环控制系统的静态稳定误差,可有效提高控制精度,但同时也会带来超调和不易
稳定的副作用。
Tt_C:积分时间常数,控制器默认值为 1S。增加积分时间常数值则积分作用变弱,系统的
响应速度变慢;减小积分时间常数值则积分作用变强,系统的响应速度变快。
Ih_0、Ih_1:积分限制门槛值,Ih_0为积分限制下界门槛值,默认值为 0%;Ih_1为积分限
制上界门槛值,默认值为 60%。当系统误差绝对值在 Ih_0和 Ih_1之间的区域,则
启动积分控制功能;当系统误差绝对值小于 Ih_0时,积分器则冻结,控制器不再累
加积分器数值,维持当前状态。这项功能可以在系统误差达到要求时,避免系统反
复调节造成不能稳定的情况。当系统误差绝对值大于 Ih_1时,积分器则清零,控制
器关闭积分控制作用。这可以避免在系统误差较大时,由于积分作用而产生的较大
超调。
dt_C:微分时间常数,控制器默认值为 0.5mS,增加该参数,系统的阻尼作用会增强,可
减小系统高频振荡,但系统动态响应速度变慢,同时系统对干扰的敏感性也较大。
dL_C:微分滤波常数,默认值为 20,增加其常数,会增加系统的稳定性,但响应速度变
慢。
SG_1、SG_2、Sh_0、Sb_0:前向通道参数,其中 SG_1、SG_2为前向通道阶段增益系数,
默认值都为 0,没有用到。Sh_0 为前向通道增益分界门槛值,默认为 100%。Sb_0
为前向通道偏置常数,默认为 0。前向通道适用于能实现开环控制前提下的闭环控
制,这样的闭环控制速度快,性能好。

上海天浔智能科技有限公司 DigiPOTTM
TinSun Tech Shanghai Co.,Ltd.
专业的伺服比例控制方案 - 16 - E-mail: [email protected]
OP_S:输出极性控制,1 表示同向,0 表示反向,默认为 1。用户需检查控制系统运动状
态是否为减小误差方向,即为负反馈,若是正反馈则需改变极性。
OP_H、OP_L:输出到比例阀的范围值,显示的是满量程的百分比。默认值分别为 95%、
-95%,适用于限定比例阀开度值。当 OP_S 改变了极性,则输出上限和下限范围
需调换。
R_EN:斜坡使能参数,1表示斜坡使能,0表示斜坡禁能。默认值为 0。
R_St:S 平滑曲线时间常数,当用户需要控制负载动作柔顺、平稳的时候,可以调整该参
数,值越大动作越平滑,运动会变得缓慢。
R_PU、R_Pd、R_NU、R_Nd:斜坡时间参数,根据用户需要调整。
CLS、OPN:闭环、开环控制选择,默认值为 CLS。当用户在调试设备,不需要控制器闭
环时,选择 OPN控制就可以。
7. 电气技术参数 供电电源:
电源电压范围 最小 15Vdc 最大 30Vdc
电源电流消耗 最小 70mA 最大 120mA
电源保险限制电流 500mA
浪涌尖峰抑制电压 最大 38.9V
钳位最大峰值电流 10.3A
电源极性保护反向耐压 最大 400V
数字 I/O接口
数字输入高电平 >3.2V(5V电平) >9.5V(24V电平)
数字输入低电平 <1.2V(5V电平) <1.8V(24V电平)
高电平输入电流 <7.2mA(5V电平) <15mA(24V电平)
数字量输入开关响应 上升延迟<0.8uS 下降延迟<0.8uS
数字输入隔离绝缘强度 3000V
开关量输出导通电阻 <2.5Ω
开关量输出导通电流 最大 400mA
开关量输出泄漏电流 <1uA
开关量输出截止耐压 >60V

上海天浔智能科技有限公司 DigiPOTTM
TinSun Tech Shanghai Co.,Ltd.
专业的伺服比例控制方案 - 17 - E-mail: [email protected]
开关量输出开关响应 导通延迟<1.5mS 关断延迟<1.5mS
开关输出隔离绝缘强度 1500V
传感器 SSI同步串行数字接口
通讯模式 平衡传输模式
通讯速率 最大 2Mb/S
数据格式 24位或 25位,二进制或格雷码
模拟通道 A/D、D/A接口
信号输入模式 单端
信号输入范围 0~10V
A/D转换精度 12位
A0通道
采样速率 5KS/S
信号输入模式 单端
信号输入范围 0~10V
A/D转换精度 12位
A1通道
采样速率 5KS/S
信号输入模式 差分
信号输入范围 0~±10V或 4~20mA
A/D转换精度 16位
A2通道
采样速率 1.25KS/S
信号输入模式 差分
信号输入范围 0~±10V或 4~20mA
A/D转换精度 16位
A3通道
采样速率 1.25KS/S
信号输出模式 单端
信号输入范围 0~±10V或 4~20mA
A/D转换精度 14位
SO通道
转换速率 1.25KS/S

上海天浔智能科技有限公司 DigiPOTTM
TinSun Tech Shanghai Co.,Ltd.
专业的伺服比例控制方案 - 18 - E-mail: [email protected]
RS458通讯接口
通讯模式 全双工平衡传输模式
通讯速率 最大 10Mb/S
数据格式 8位异步串行通讯
8. 外形尺寸 MC2000A系列电液伺服数字控制器采用 DIN标准导轨卡入式安装,外形尺寸(mm):
45x75x105,如下图所示。
105mm45mm
图 5:外形尺寸

上海天浔智能科技有限公司 DigiPOTTM
TinSun Tech Shanghai Co.,Ltd.
专业的伺服比例控制方案 - 19 - E-mail: [email protected]
“诚信、创新、发展”
上海天浔 ————
与您一起见证中国液压工业的崛起!
上海天浔智能科技有限公司
地址:上海市虹口区霍山路 170号 805室
电话:021—51259298
传真:021—51259281
www.digipot.com.cn