-
TRABAJO COLABORATIVO 2
DIANA PAOLA PUENTES PACHECO CODIGO: 55190429
RONAL ALEXIS MARTINEZ
CODIGO: 74185167
JUAN GABRIEL NARANJO ORTIZ CODIGO:
CURSO: CONTROL ANALOGICO
TUTOR: FABIAN BOLIVAR
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA UNAD 2014
-
INTRODUCCION
A continuacin se presenta el trabajo colaborativo 2 del curso
control analgico, en el cual por medio de 2 ejercicios se aplicaran
los conocimientos adquiridos con el estudio de la unidad 2 del
curso. Se trabajara con el software MATLAB, donde por medio de
funciones especficas se desarrollara cada ejercicio planteado en la
gua de actividades y se adjuntara las grficas de cada uno,
complementndolas con los aportes de los integrantes del grupo.
-
EJERCICIOS:
1. Disear un controlador PID para el sistema de la figura de tal
manera que el sobre impulso sea mximo del 5% y el tiempo de
establecimiento sea de 4 segundos.
H=tf([1],[1 21 20]); pp=pole(H); dt=0.05; t=0:dt:7; y=step(H,t);
dy=diff(y)/dt; [m,p]=max(dy); d2y=diff(dy)/dt; yi=y(p); ti=t(p);
L=ti-yi/m; Tau=(y(end)-yi)/m+tm-L; figure (1) plot (t,y,'b',[0 L
L+Tau t(end)],[0 0 y(end) y(end)],'k') title ('respuesta al
escalon') ylabel ('amplitud') xlabel ('tiempo (s)') kp=1.2*Tau/L;
Ti=2*L; Td=0.5*L; Ki=Kp/Ti; Kd=Kp*Td; G=tf([Kd Kp Ki],[1 0]) %
controlador % lazo cerrado HLC=feedback(G*H,1); pole (HLC);
figure(2) step(HLC) figure(3) pzmap (HLC) grid % refinamiento la
derivativa no puede superar kp Kp1=1,5*Kp; Kd1=0*Kd; Ki1=0*Ki;
G1=tf([Kd1 Kp1 Ki1],[1 0]) % controlador HLC1=feedback(G1*H,1);
figure(4)
-
step(HLC,HLC1) legend ('PID Z-N','PID refinado')
Valores generados:
-
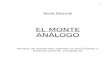
Ubicacion de los polos.
Respuesta al escalon.
-
Grafica del controlador PID ZN sin arreglo, pero cumple el
tiempo de 4 seg
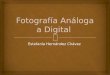
Refinamientos de las seales.
Pero entre mas se busca cumplir con el 5% que se pide se
disminuye el tiempo de
establecimiento, lo que con lleva a gastar mas energia en el
arranque.
-
2. Para el siguiente sistema determine: 1. Su controlabilidad.
2. Su observabilidad.
SOLUCION Obtencin de la matriz de controlabilidad X= Ax + Bu Y=
Cx + Du Dnde: x= vector de estado (de dimensin de estado n) u=
vector de control (de dimensin r) y= vector de salida (de dimensin
n) A= matriz de n * n B= matriz de n * r C= matriz de m * n D=
matriz de m * r Obteniendo la matriz de controlabilidad en
MATLAB
-
Obteniendo la matriz de controlabilidad de forma manual
A=
B=
C=
D=A *B
E=A2
F= E * B
M= B * D * F
-
M=
Obteniendo la matriz de ganancia de realimentacin del estado k
usando la
frmula de Ackermann
-
Hallando la observabilidad en MATLAB
A partir de las salidas de un sistema es posible conocer el
comportamiento de todo el sistema. Cuando un sistema no es
observable, quiere decir que los valores actuales de algunos de sus
estados no pueden ser determinados
-
mediante sensores de salida, esto implica que su valor es
desconocido para el controlador y, consecuentemente, no ser capaz
de satisfacer las especificaciones de control referidas a estas
salidas
-
CONCLUSIONES
Con la realizacin del anterior trabajo colaborativo se pudo
colocar en prctica
los temas revisados y estudiados de la unidad 1 del mdulo del
curso control
analgico, se trabaj el diseo de controladores P, PI Y PID, con
los cuales
por medio de la planta o funcin de transferencia dada se trabaj
su respuesta
los cuales se trabajaron en MATLAB.
-
BIBLIOGRAFIA
299005ING. UNAD CONTROL ANALGICO CONTROL ANALOGICO, NG. FABIAN
BOLIVAR MARIN NEIVA 2013 MATLAB