Embed Size (px)
Citation preview
Instrumentacao e Controle
Aula 11
Controle em malha fechada
Prof. Renato Watanabe
ESTO004-17
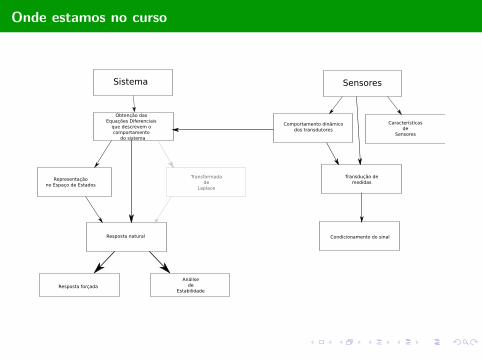
Onde estamos no curso
Sistema
Obtenção das Equações Diferenciais
que descrevem o comportamento
do sistema
Representação no Espaço de Estados
Transformadade
Laplace
Resposta natural
Resposta forçada
Análisede
Estabilidade
Sensores
Característicasde
Sensores
Comportamento dinâmicodos transdutores
Transdução demedidas
Condicionamento do sinal
2 2
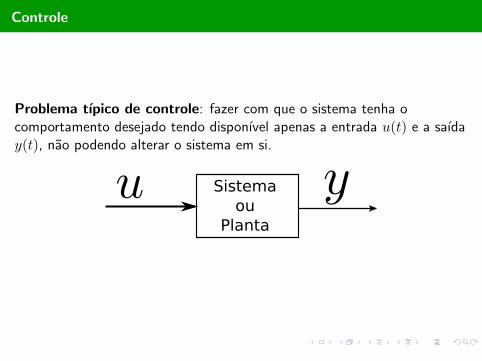
Controle
Problema tıpico de controle: fazer com que o sistema tenha ocomportamento desejado tendo disponıvel apenas a entrada u(t) e a saıday(t), nao podendo alterar o sistema em si.
Sistema
ou
Planta
3 3
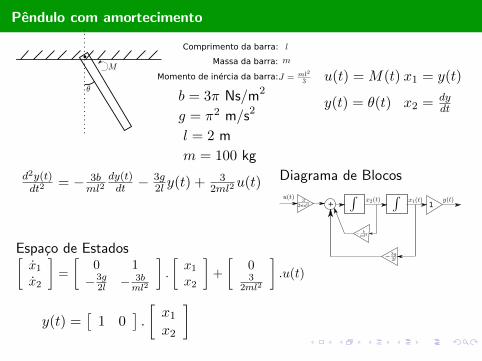
Pendulo com amortecimento
Comprimento da barra:
Momento de inércia da barra:
Massa da barra:
u(t) = M(t)
y(t) = θ(t)
d2y(t)dt2
= − 3bml2
dy(t)dt − 3g
2l y(t) + 32ml2
u(t)
x1 = y(t)
x2 = dydt
Espaco de Estados[x1x2
]=
[0 1
−3g2l − 3b
ml2
].
[x1x2
]+
[03
2ml2
].u(t)
y(t) =[
1 0].
[x1x2
]
Diagrama de Blocos
1+
b = 3π Ns/m2
g = π2 m/s2
l = 2 m
m = 100 kg
4 4
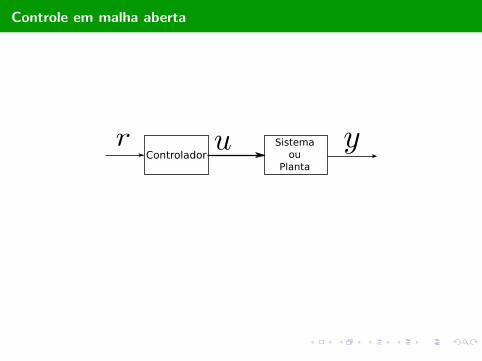
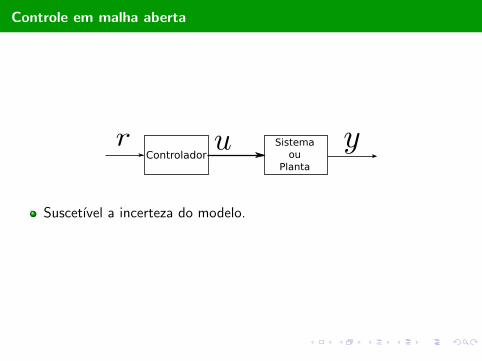
Controle em malha aberta
Sistema
ou
Planta
Controlador
Suscetıvel a incerteza do modelo.
5 5
Controle em malha aberta
Sistema
ou
Planta
Controlador
Suscetıvel a incerteza do modelo.
5 5
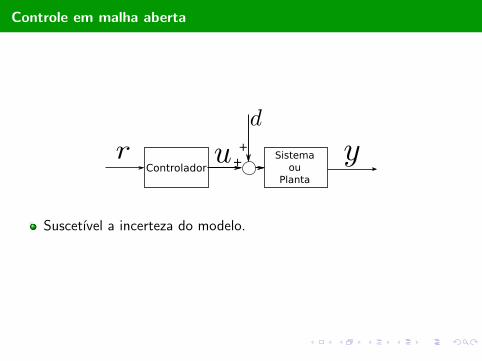
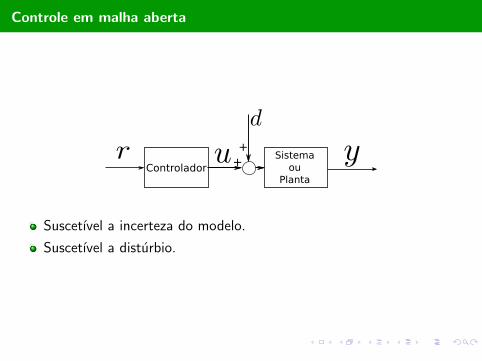
Controle em malha aberta
Sistema
ou
Planta
Controlador+
+
Suscetıvel a incerteza do modelo.
Suscetıvel a disturbio.
6 6
Controle em malha aberta
Sistema
ou
Planta
Controlador+
+
Suscetıvel a incerteza do modelo.
Suscetıvel a disturbio.
6 6
Controle em malha fechada
Sistema
ou
Planta+
-
Controlador+
+
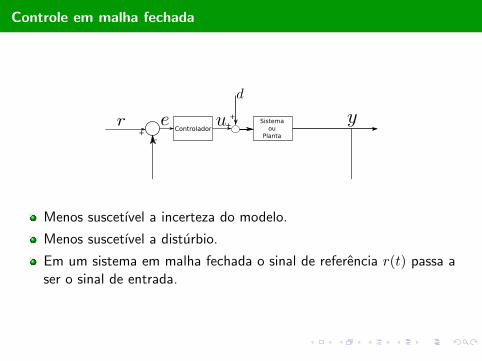
Menos suscetıvel a incerteza do modelo.
Menos suscetıvel a disturbio.
Em um sistema em malha fechada o sinal de referencia r(t) passa aser o sinal de entrada.
7 7
Controle em malha fechada
Sistema
ou
Planta
Sensor
+-
Controlador+
+
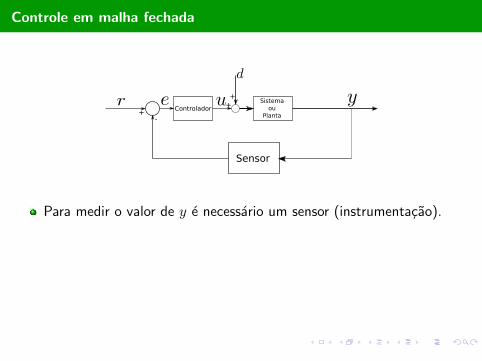
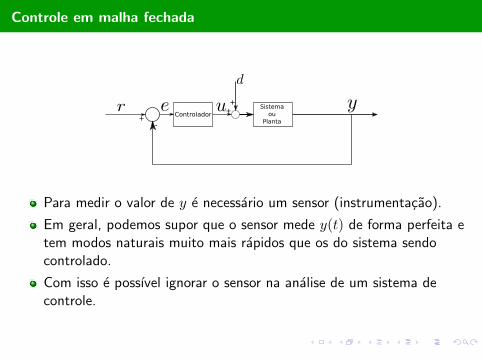
Para medir o valor de y e necessario um sensor (instrumentacao).
Em geral, podemos supor que o sensor mede y(t) de forma perfeita etem modos naturais muito mais rapidos que os do sistema sendocontrolado.
Com isso e possıvel ignorar o sensor na analise de um sistema decontrole.
8 8
Controle em malha fechada
Sistema
ou
Planta
Sensor
+-
Controlador+
+
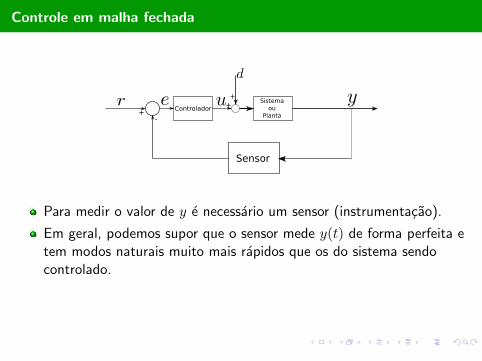
Para medir o valor de y e necessario um sensor (instrumentacao).
Em geral, podemos supor que o sensor mede y(t) de forma perfeita etem modos naturais muito mais rapidos que os do sistema sendocontrolado.
Com isso e possıvel ignorar o sensor na analise de um sistema decontrole.
8 8
Controle em malha fechada
Sistema
ou
Planta
Sensor
+-
Controlador+
+
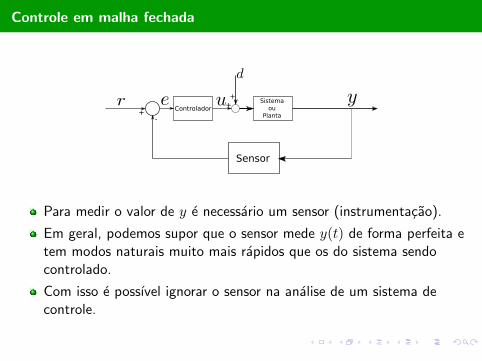
Para medir o valor de y e necessario um sensor (instrumentacao).
Em geral, podemos supor que o sensor mede y(t) de forma perfeita etem modos naturais muito mais rapidos que os do sistema sendocontrolado.
Com isso e possıvel ignorar o sensor na analise de um sistema decontrole.
8 8
Controle em malha fechada
Sistema
ou
Planta+
-
Controlador+
+
Para medir o valor de y e necessario um sensor (instrumentacao).
Em geral, podemos supor que o sensor mede y(t) de forma perfeita etem modos naturais muito mais rapidos que os do sistema sendocontrolado.
Com isso e possıvel ignorar o sensor na analise de um sistema decontrole.
9 9
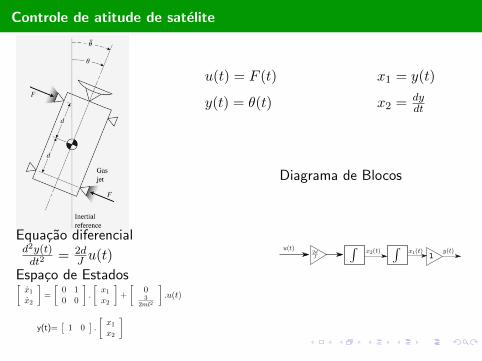
Controle de atitude de satelite
u(t) = F (t)
y(t) = θ(t)
Equacao diferenciald2y(t)dt2
= 2dJ u(t)
x1 = y(t)
x2 = dydt
Espaco de Estados[x1x2
]=
[0 10 0
].
[x1x2
]+
[03
2ml2
].u(t)
y(t)=[
1 0].
[x1x2
]
Diagrama de Blocos
1
10 10
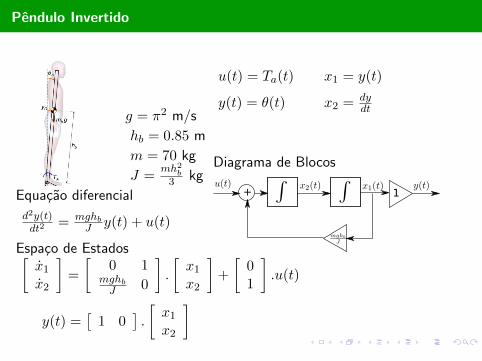
Pendulo Invertido
u(t) = Ta(t)
y(t) = θ(t)
x1 = y(t)
x2 = dydt
Equacao diferencial
d2y(t)dt2
= mghbJ y(t) + u(t)
Espaco de Estados[x1x2
]=
[0 1
mghbJ 0
].
[x1x2
]+
[01
].u(t)
y(t) =[
1 0].
[x1x2
]
Diagrama de Blocos
1+
g = π2 m/s
hb = 0.85 m
m = 70 kg
J =mh2
b3 kg
11 11
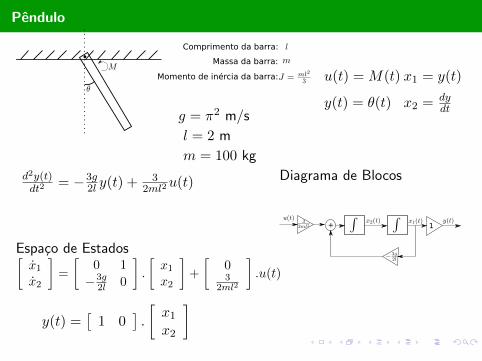
Pendulo
Comprimento da barra:
Momento de inércia da barra:
Massa da barra:
u(t) = M(t)
y(t) = θ(t)
d2y(t)dt2
= −3g2l y(t) + 3
2ml2u(t)
x1 = y(t)
x2 = dydt
Espaco de Estados[x1x2
]=
[0 1
−3g2l 0
].
[x1x2
]+
[03
2ml2
].u(t)
y(t) =[
1 0].
[x1x2
]
Diagrama de Blocos
1+
g = π2 m/s
l = 2 m
m = 100 kg
12 12
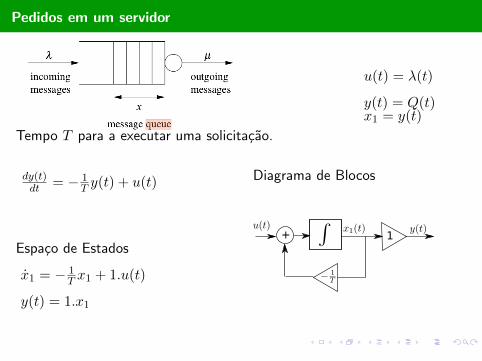
Pedidos em um servidor
Tempo T para a executar uma solicitacao.
u(t) = λ(t)
y(t) = Q(t)
dy(t)dt = − 1
T y(t) + u(t)
x1 = y(t)
Espaco de Estados
x1 = − 1T x1 + 1.u(t)
y(t) = 1.x1
Diagrama de Blocos
+ 1
13 13

Motor DC
u(t) = ea(t)
y(t) = ω(t)
Equacoes diferenciais:
dia(t)dt = −Ra
Laia(t) + Kb
Lay(t) + 1
Lau(t)
dy(t)dt = − b
J y(t) + KJ ia(t)
x1 = ia(t)
x2 = y(t)
Espaco de Estados[x1x2
]=
[−Ra
LaKbLa
KJ − b
J
].
[x1x2
]+
[ 1La0
].u(t)
y(t) =[
0 1].
[x1x2
]
Diagrama de Blocos
+ + 1
b = 0, 03 Ns/m2 J = 0, 01 kg.m2 Ra = 0, 5Ω
La = 0, 05 H K = 0, 05 N.m/A Kb = 0, 05 V.s/rad
14 14
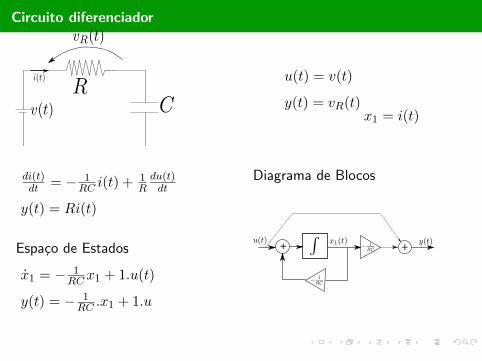
Circuito diferenciador
u(t) = v(t)
y(t) = vR(t)
di(t)dt = − 1
RC i(t) + 1R
du(t)dt
y(t) = Ri(t)
x1 = i(t)
Espaco de Estados
x1 = − 1RCx1 + 1.u(t)
y(t) = − 1RC .x1 + 1.u
Diagrama de Blocos
+ +
15 15
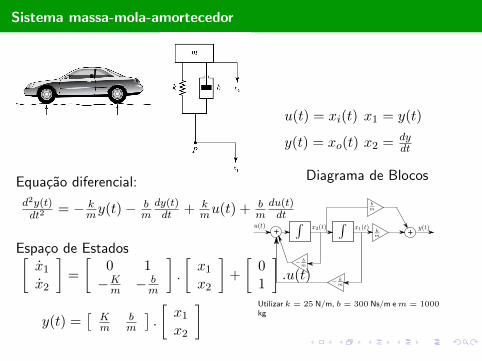
Sistema massa-mola-amortecedor
Equacao diferencial:
d2y(t)dt2
= − kmy(t) − b
mdy(t)dt + k
mu(t) + bm
du(t)dt
u(t) = xi(t)
y(t) = xo(t)
x1 = y(t)
x2 = dydt
Espaco de Estados[x1x2
]=
[0 1
−Km − b
m
].
[x1x2
]+
[01
].u(t)
y(t) =[
Km
bm
].
[x1x2
]
Diagrama de Blocos
+ +
Utilizar k = 25 N/m, b = 300 Ns/m em = 1000kg
16 16
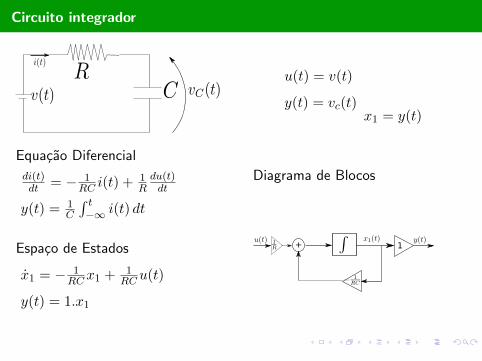
Circuito integrador
u(t) = v(t)
y(t) = vc(t)
Equacao Diferencial
di(t)dt = − 1
RC i(t) + 1R
du(t)dt
y(t) = 1C
∫ t−∞ i(t) dt
x1 = y(t)
Espaco de Estados
x1 = − 1RCx1 + 1
RCu(t)
y(t) = 1.x1
Diagrama de Blocos
1+
17 17
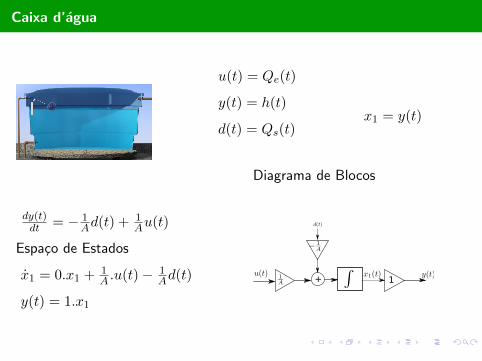
Caixa d’agua
u(t) = Qe(t)
y(t) = h(t)
d(t) = Qs(t)
dy(t)dt = − 1
Ad(t) + 1Au(t)
x1 = y(t)
Espaco de Estados
x1 = 0.x1 + 1A .u(t) − 1
Ad(t)
y(t) = 1.x1
Diagrama de Blocos
+ 1
18 18
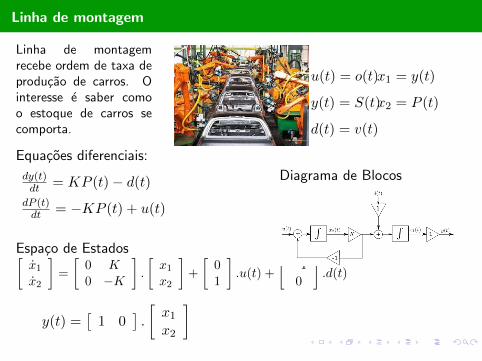
Linha de montagem
Linha de montagemrecebe ordem de taxa deproducao de carros. Ointeresse e saber comoo estoque de carros secomporta.
u(t) = o(t)
y(t) = S(t)
d(t) = v(t)
Equacoes diferenciais:
dy(t)dt = KP (t) − d(t)
dP (t)dt = −KP (t) + u(t)
x1 = y(t)
x2 = P (t)
Espaco de Estados[x1x2
]=
[0 K0 −K
].
[x1x2
]+
[01
].u(t) +
[−10
].d(t)
y(t) =[
1 0].
[x1x2
]
Diagrama de Blocos
+
19 19
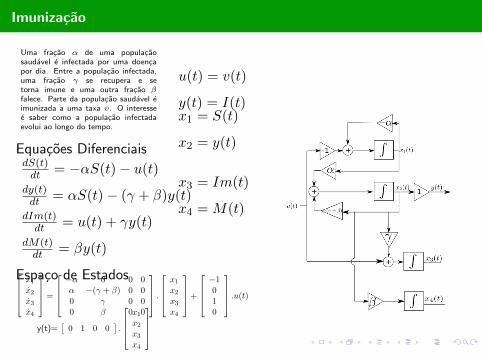
Imunizacao
Uma fracao α de uma populacaosaudavel e infectada por uma doencapor dia. Entre a populacao infectada,uma fracao γ se recupera e setorna imune e uma outra fracao βfalece. Parte da populacao saudavel eimunizada a uma taxa v. O interessee saber como a populacao infectadaevolui ao longo do tempo.
u(t) = v(t)
y(t) = I(t)
Equacoes DiferenciaisdS(t)dt = −αS(t) − u(t)
dy(t)dt = αS(t) − (γ + β)y(t)
dIm(t)dt = u(t) + γy(t)
dM(t)dt = βy(t)
x1 = S(t)
x2 = y(t)
x3 = Im(t)
x4 = M(t)
Espaco de Estadosx1x2x3x4
=
−α 0 0 0α −(γ + β) 0 00 γ 0 00 β 0 0
.x1x2x3x4
+
−1010
.u(t)
y(t)=[
0 1 0 0].
x1x2x3x4
Diagrama de Blocos
+
+-1
+
20 20





























