Embed Size (px)
Citation preview

Budapesti M¶szaki és Gazdaságtudományi EgyetemVillamosmérnöki és Informatikai Kar
Hálózati Rendszerek és Szolgáltatások Tanszék
Diszperz húrok modellezésevégeselem módszerrel
Szakdolgozat
Készítette Konzulens
Horváth Máté Péter Rucz Péter
2013. május 17.

2
Tartalomjegyzék
Kivonat 7
Abstract 9
1. Bevezetés 111.1. Motiváció . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.2. Irodalmi áttekintés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2. A húr zikája 132.1. Ideális pengettett húr rezgései . . . . . . . . . . . . . . . . . . . . . . . . . . 132.2. Csillapított ideális húr . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.2.1. Viszkózus csillapítás . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.2.2. Elasztikus veszteség . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.2.3. Nemideális lezárás . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.2.4. Módosított egyenlet . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.3. Hajlító rezgések . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.4. Merev húr mozgásegyenlete . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.5. Merev, csillapított húr mozgásegyenlete . . . . . . . . . . . . . . . . . . . . 18
3. A végeselem módszer 193.1. Alapok . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.2. Az ideális, csillapított húr végeselem modellje . . . . . . . . . . . . . . . . . 20
3.2.1. A gyenge alak . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203.2.2. Közelítés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203.2.3. Térbeli diszkretizáció . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.2.4. Id®beli diszkretizáció . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.3. A nemideális húr végeselem modellje . . . . . . . . . . . . . . . . . . . . . . 233.4. Kényszerek és peremfeltételek . . . . . . . . . . . . . . . . . . . . . . . . . . 233.5. Alakfüggvények a nemideális modellben . . . . . . . . . . . . . . . . . . . . 243.6. Kezdeti elmozdulás meghatározása . . . . . . . . . . . . . . . . . . . . . . . 25
4. Eredmények 274.1. Az ideális húr . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.1.1. Összehasonlítás az analitikus megoldással . . . . . . . . . . . . . . . 274.1.2. Az ideális húrmodell eredményei . . . . . . . . . . . . . . . . . . . . 28
4.2. A véges merevség¶, nemideális húr . . . . . . . . . . . . . . . . . . . . . . . 294.3. A modell validálása valós mérések alapján . . . . . . . . . . . . . . . . . . . 304.4. Eredmények értékelése, kitekintés . . . . . . . . . . . . . . . . . . . . . . . . 31
3
5. Összehasonlítás méréssel 355.1. A gitár . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 355.2. A húrok mérése . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 355.3. A húrláb mérése . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
6. Összegzés 41
Köszönetnyilvánítás 43
Irodalomjegyzék 45
Forrásfájlok 47
4
Ábrák jegyzéke
2.1. A húron fellép® er®k . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.2. A rúdelemen fellép® er®k . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
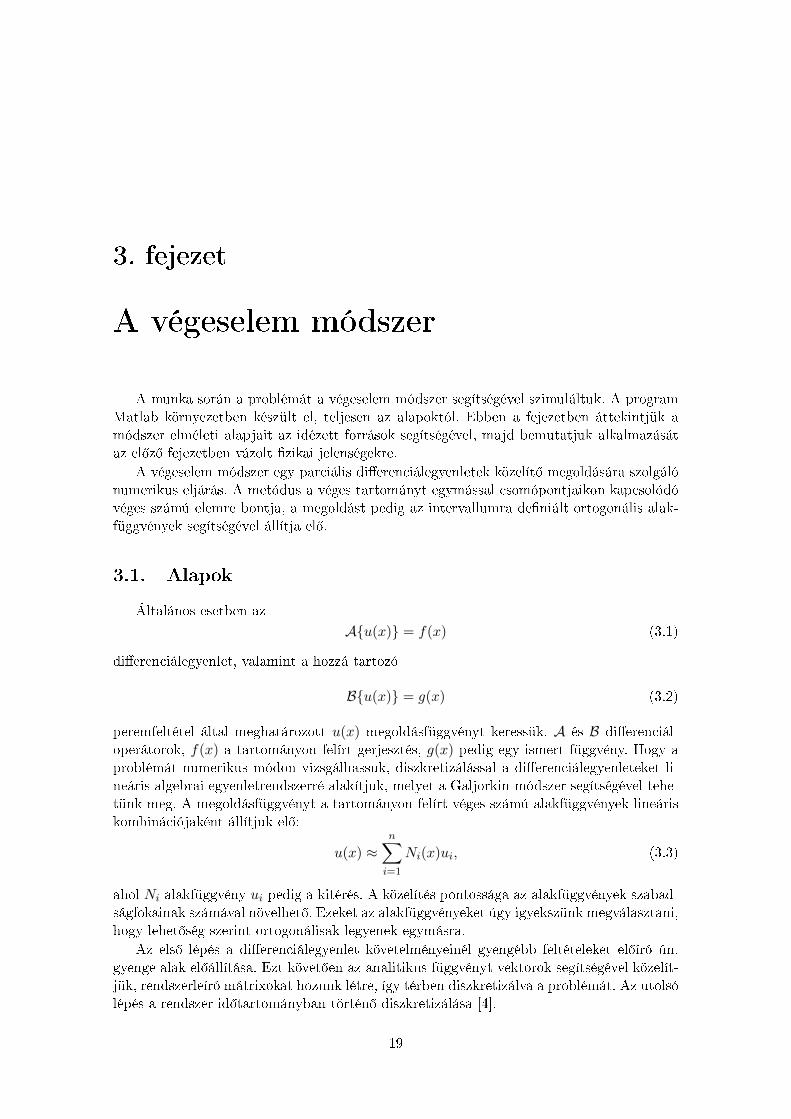
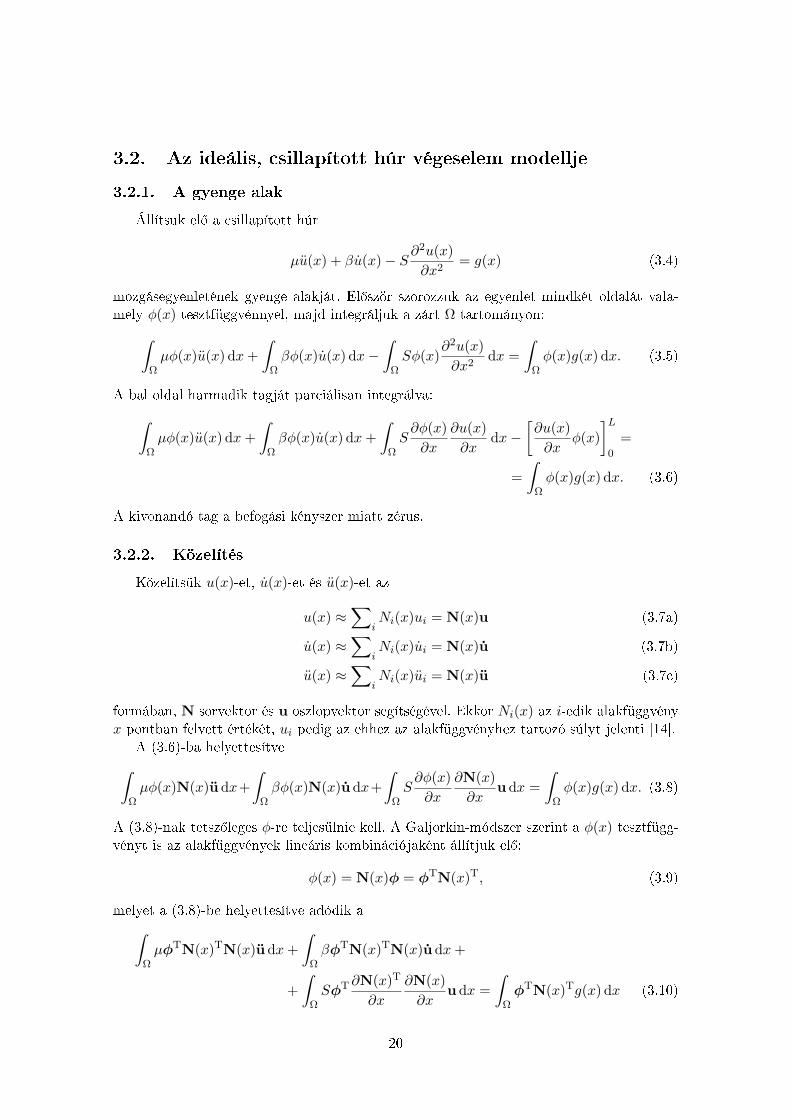
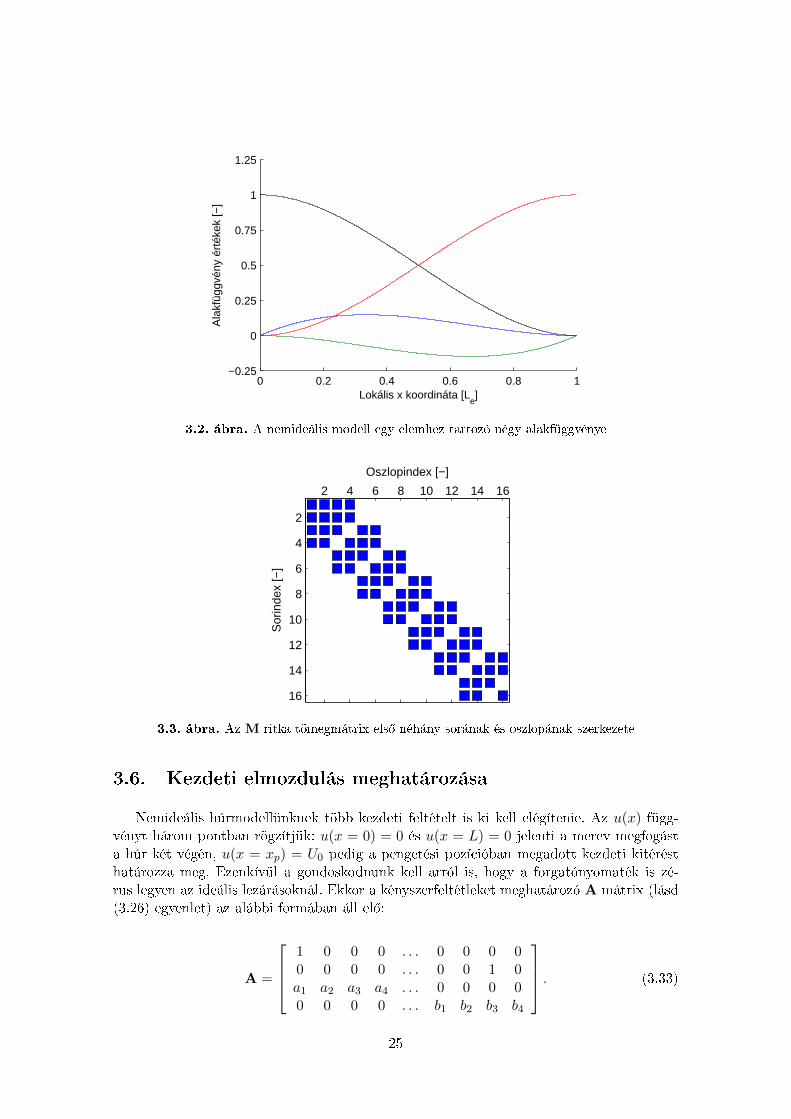
3.1. Master (kék) és slave (piros) szabadságfokok a húron . . . . . . . . . . . . . 233.2. A nemideális modell egy elemhez tartozó négy alakfüggvénye . . . . . . . . 253.3. Az M ritka tömegmátrix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.4. Merev húr kezdeti kitérése ideális pengetés esetén . . . . . . . . . . . . . . . 26
4.1. Ideális, csillapítatlan húr egy pontja kitérésének id®függvénye . . . . . . . . 274.2. A hiba az id® függvényében . . . . . . . . . . . . . . . . . . . . . . . . . . . 284.3. Egy pont kitérésének spektruma az ideális, csillapítatlan esetben . . . . . . 294.4. A csillapított húr egy pontjának kitérése az id® függvényében . . . . . . . . 294.5. A merev húr egy pontjának kitérése . . . . . . . . . . . . . . . . . . . . . . . 304.6. Inharmonicitás a diszperz húrban . . . . . . . . . . . . . . . . . . . . . . . . 314.7. A B3-as húr id®-, és frekvenciatartományban . . . . . . . . . . . . . . . . . . 324.8. A E4-es húr inharmonicitása . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.1. A gitár felépítése . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 365.2. Az elrendezés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 365.3. Az 1/2-énél pengetett G2 húr inharmonicitása . . . . . . . . . . . . . . . . . 375.4. A D2 húr inharmonicitásai a pengetés helyének függvényében . . . . . . . . 385.5. Mérési pontok a húrlábon . . . . . . . . . . . . . . . . . . . . . . . . . . . . 395.6. A lezárás frekvenciafüggése . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5
HALLGATÓI NYILATKOZAT
Alulírott Horváth Máté Péter, szigorló hallgató kijelentem, hogy ezt a szakdolgozatot-meg nem engedett segítség nélkül, saját magam készítettem, csak a megadott forrásokat(szakirodalom, eszközök stb.) használtam fel. Minden olyan részt, melyet szó szerint,vagy azonos értelemben, de átfogalmazva más forrásból átvettem, egyértelm¶en, a forrásmegadásával megjelöltem.
Hozzájárulok, hogy a jelen munkám alapadatait (szerz®(k), cím, angol és magyar nyelv¶tartalmi kivonat, készítés éve, konzulens(ek) neve) a BME VIK nyilvánosan hozzáférhet®elektronikus formában, a munka teljes szövegét pedig az egyetem bels® hálózatán keresztül(vagy autentikált felhasználók számára) közzétegye. Kijelentem, hogy a benyújtott munkaés annak elektronikus verziója megegyezik. Dékáni engedéllyel titkosított diplomatervekesetén a dolgozat szövege csak 3 év eltelte után válik hozzáférhet®vé.
Budapest, 2013. május 17.
Horváth Máté Péter
hallgató
Kivonat
A hangszerek fontos csoportját képezik a kordofonok, melyek esetében a hangkeltéstmegfeszített húrok gerjesztésével érjük el. Ez többféleképpen lehetséges, például a húr voná-sával, ütésével, vagy pengetésével. Jelen dolgozatban els®sorban az utóbbi gerjesztési módrakoncentrálunk. A húros hangszerekre általánosan jellemz®, hogy a húr rezgési energiájábólnem közvetlen úton keletkezik hang, hanem eltekintve az elektromos hangszerekt®l ahúr rezgésbe hozza a hangszer testét, a hanglesugárzás pedig dönt®en a hangszertestr®ltörténik. A lesugárzott hang zikai szimulációjához ezért az els® és legfontosabb lépés ahúrok rezgésének számítása.
Hangkeltéskor a valóságos húrokban kialakuló rezgésalakok kiszámítása bonyolult fel-adat, csak ideális esetben, durva elhanyagolásokkal számíthatóak ki analitikusan a meg-jelen® rezgésformák. Ezért, ha gyelembe kívánjuk venni a húrok valóságos, nemideálisjellemz®it is, le kell mondanunk az analitikus megoldásról, mivel az inhomogenitás, nem-ideális lezárások, diszperzió, frekvenciafügg® csillapítás stb. együttes gyelembevételével arendszert leíró egyenletek megoldása nem fejezhet® ki analitikusan.
A numerikus technikák az analitikus módszerekkel szemben a zikai egyenletek köze-lít® megoldásait keresik, az elérhet® pontosság csak a zikai modell részletességének és arendelkezésre álló számítási kapacitásnak a függvénye. A problémát ebben a dolgozatban avégeselem módszer segítségével vizsgáljuk, mely a véges tartományon felírt parciális die-renciálegyenletek peremérték-feladatainak megoldására szolgáló numerikus eljárás. Ezeketa peremérték-feladatokat munkánk során az id®tartományban oldjuk meg.
A valóságos húrok igen fontos nemideális tulajdonsága a diszperzió, mely a húr merev-ségéb®l fakad. Ez azt jelenti, hogy a húrban megjelen® rezgésalakok nem tisztán transzver-zálisak, hanem hajlító hullámokat is tartalmaznak. A diszperzió következtében a húrbana hullámok terjedési sebessége frekvenciafügg®, így a húr módusaira is az inharmonicitásjellemz®. A dolgozat célja a húr viselkedésének minél pontosabb szimulációja a diszperziógyelembevételével.
A dolgozatban ismertetésre kerül a pengetett húr zikai modellje, majd ennek véges-elem módszerrel történ® leírása. Bemutatásra kerülnek az ideális és nemideális húr véges-elem modellje közötti különbségek. Ezt követ®en a peremérték-feladat id®tartománybelimegoldásának lépéseit részletezzük. Az ideális és nemideális húrok modellezésével kapotteredményeket analitikusan számított és mért adatokkal hasonlítjuk össze.
7

8

Abstract
Chordophones form an important group among musical instruments. In their casesound is produced by the excitation of an intense string. This can be achieved in variousways such as bowing, strucking, or plucking. This thesis focuses mainly on the latter meansof excitation. It is characteristic of chordophones that sound is not produced in a directmanner from the mechanical energy of the string, yet (except electrical instruments) thestring excites the body of the instrument and the body becomes the primary source ofsound radiation. The rst step that must be taken to be able to phisically simulate thissound generation mechanism is therefore to calculate the vibration of the string.
Calculating the vibration shapes of real strings is a complex problem, an analyticsolution can only be obtained in the ideal case, applying rough estimations and neglects. Ifthe non-ideal attributes of real strings are to be taken into consideration, analytic methodshave to be given up on, as by taking inhomogeneity, non-ideal terminations, dispersion,frequency dependent damping etc. into account at once, the resulting set of equationswould be too cumbersome to solve in an analytic manner.
In numerical analysis, contrary to the analytic methodology, an approximate solution ofthe physical system is sought; hence the achievable accuracy depends only on the precisionof the model and the computational capacity at hand. In this work the problem is examinedby means of the nite element method, which is a numerical technique for solving boundaryvalue problems of dierential equations in a nite domain. These boundary value problemsare to be solved in the time domain herein.
An important attribute of real stings is dispersion due to their nite stiness. Thismeans that vibration shapes are not purely transversal, but contain bending wave compo-nents as well. As a result of dispersion, wave velocity inside the string becomes frequencydependent, yielding inharmonic string modes. The goal of this thesis is the accurate mo-deling of string behavior taking dispersion into account.
First, the physical model of plucked strings and important aspects of their nite elementrepresentation are described. Then dierences between the ideal and real string modelare examined. Afterwards, the time-stepping solution of the boundary value problem isdiscussed in detail. Finally, simulation results of ideal and non-ideal strings are presentedand compared against analytically calculated and measured data.
9

10
1. fejezet
Bevezetés
1.1. Motiváció
Jelen dolgozat megírását az ideális és nemideális húrok mozgásának, valamint a disz-perzió jelenségének mélyebb megértése, és minél pontosabb zikai szimulációja motiválta.Kutatásunk során a pontszer¶en megpengetett húr szimulációját t¶ztük ki célként.
A hangszerek hangkeltésének modellezése többféle módon történhet. Kedvelt módszerpéldául az el®re felvett hangminták különféle algoritmusokkal való megváltoztatásával tör-tén® szintetizálás, melynek nincs elvi kapcsolata a hangszer m¶ködésének mechanizmusával.Ezzel szemben a zikai alapú hangszintézis lényege, hogy a valóságos hangszer viselkedésétigyekszik modellezni, kiemelt gyelemmel kezelve annak a hangkeltés szempontjából kulcs-fontosságú aspektusait. A munka során egy a kés®bbiekben erre alkalmas modell létrehozásavolt a cél. A zikai alapú szimuláció hátránya, hogy alkalmazása egy adott rendszerre kor-látozódik, számításigénye sokszorosa a tradicionális technikáknak. Munkánk során komolymegfontolásokat kellett tennünk, hogy felmérjük, mely tulajdonságok játszanak fontos sze-repet a hangkeltésben, és melyek elhanyagolhatóak, annak érdekében, hogy a modellt nelassítsák a végeredmény szempontjából lényegtelen komponensek.
Jóllehet az ideális húr homogén és tökéletesen rugalmas, a valóságban el®forduló húroktömegeloszlása nem állandó, valamint merevségük sem zérus. Ez utóbbi következménye adiszperzió, mely azt jelenti, hogy a különböz® frekvenciájú hullámok különböz® sebességgelterjednek a húron, a húr módusai pedig inharmonikussá válnak. Az inharmonicitás mo-dellezése nem triviális feladat, jelen dolgozatban a diszperzióval, mint a húros hangszerekhangkeltésének alapvet® sajátságával kiemelten foglalkozunk. Ugyan a diszperzió jelenségétnumerikus módszerek nélkül is értjük, ám az inharmonicitás kiszámításához bonyolultabbesetekben, például inhomogén húrok esetén már nem találunk analitikus megoldást, ezérta jelenség modellezéséhez a végeselem módszert hívtuk segítségül.
A következ® fejezetben a húr rezgésének zikai leírásáról lesz szó. Részletesen bemu-tatásra kerülnek a húr mozgását leíró összefüggések, az alapvet® hullámegyenlett®l kezdvea nemideális, csillapított húrig. A haramadik fejezetben a végeselem módszert és annakproblémánk esetében történ® alkalmazhatóságát ismertetjük. Szó lesz az alkalmazandóalakfüggvényekr®l, az egyenletek diszkretizálásáról, az elemmátrixok el®állításáról valaminta kényszerfeltételek és kezdetiérték feltételek meghatározásáról. A negyedik fejezetben el®-ször a húr ideális modelljét vázoljuk, majd összehasonlítjuk az analitikus megoldással. Eztkövet®en kerül sor a nemideális modellre, bemutatjuk a szimuláció felépítéseinek lépéseit,majd a kész program m¶ködését ismertetjük. Végül az utolsó fejezetben számot adunk az
11

eredményekr®l, értékeljük a tapasztalatokat, és körvonalazzuk a további kutatás lehetségesterületeit. A dolgozat végén elhelyezett függelékben bemutatjuk a szimuláció megvalósítá-sához használt Matlab forrásfájlokat.
1.2. Irodalmi áttekintés
Egyetemünk Villamosmérnöki és Informatikai Karán már többen foglalkoztak a húr-modellezés témájával (zongorahang-szintézis, gitár véges dierencia modell), ezek a dolgo-zatok nagyban segítették munkánkat és hozzájárultak ahhoz, hogy új szemszögb®l tudjukvizsgálni a problémát. Az alábbiakban a teljesség igénye nélkül összefoglaljuk azokat a m¶-veket, melyek kutatásunk kiindulópontjaiként szolgáltak és különböz® szempontok szerintközelítik meg a húr modellezésének problémáját.
Rácz Zsuzsanna Zsóa Nemideális húrok csatolt rendszerben cím¶ dolgozata [11] hú-rok húrlábon keresztül megvalósuló csatolását vizsgálja. Munkájában véges dierencia ésvégeselem modellel szimulálta az inhomogén eloszlású húrokat, melyeknél a nemidealitása húr térbeli s¶r¶ségeloszlásának véletlenszer¶ségeként jelenik meg. Ebben a modellbena húr nemideális lezárását a rúdelemekb®l megépített húrláb jelenti, melyhez több húr iskapcsolódik. Ez a modell nem veszi gyelembe a diszperzió jelenségét, mely elhanyagolásjelent®s eltéréseket eredményezhet. Ennek tekintetében kutatásunk egyik igen fontos céljaa diszperzió gyelembe vétele a modellalkotásban, illetve hatásának megmutatása a modelláltal szolgáltatott eredmények tükrében.
Bank Balázs Physics-Based Sound Synthesis of the Piano cím¶ diplomamunkájá-ban [1] egy zongora teljes waveguide-modellje kerül bemutatásra. Részletesen foglalkozikaz inharmonicitás jelenségével, munkánk egyik célja az ebben a témában megfogalmazottproblémák vizsgálata volt. A waveguide modell alapértelmezésben késleltet® egységek so-rából épül fel, melyeken az adott hullámalak egységes csoportsebességgel terjedhet. A disz-perzió beépítése a waveguide rendszerbe nem triviális feladat, a frekveciafügg® késleltetéseka húr lezárásánál sz¶r®kkel vagy törtrész-késleltet®kkel modellezhet®ek.
A kapcsolódó külföldi irodalomból leginkább J. Woodhouse írásaira támaszkodtunk.On the Synthesis of Guitar Plucks cím¶ cikkében [12] részletesen foglalkozik a penge-tett húr modális szintézisével, ehhez kapcsolódó írása pedig (Plucked Guitar Transients:Comparison of Measurements and Synthesis [13]) bemutatja a szimuláció és a mért ada-tok közötti jellegzetes eltéréseket. Nem tér ki azonban a húr mozgásának id®tartománybelivizsgálatára.
12
2. fejezet
A húr zikája
A dolgozatban a kordofon hangszerek legfontosabb közös alkotóelemének, a húrnakmozgásával foglalkozunk, a hangszer többi részének vizsgálatától eltekintünk. A húr hossza,valamint a rajta fellép® rezgések hullámhossza nagyságrendekkel nagyobb a hosszirányramer®leges kiterjedésénél, valamint a rajta véghezvitt kitérítésnél. Amennyiben ideális húr-ról beszélünk, feltesszük, hogy tökéletesen rugalmas, és az innitezimálisan kicsiny húr-elemek tömege azonos a húr mentén. Esetünkben így egydimenziós, folytonos rendszerr®lbeszélhetünk.
2.1. Ideális pengettett húr rezgései
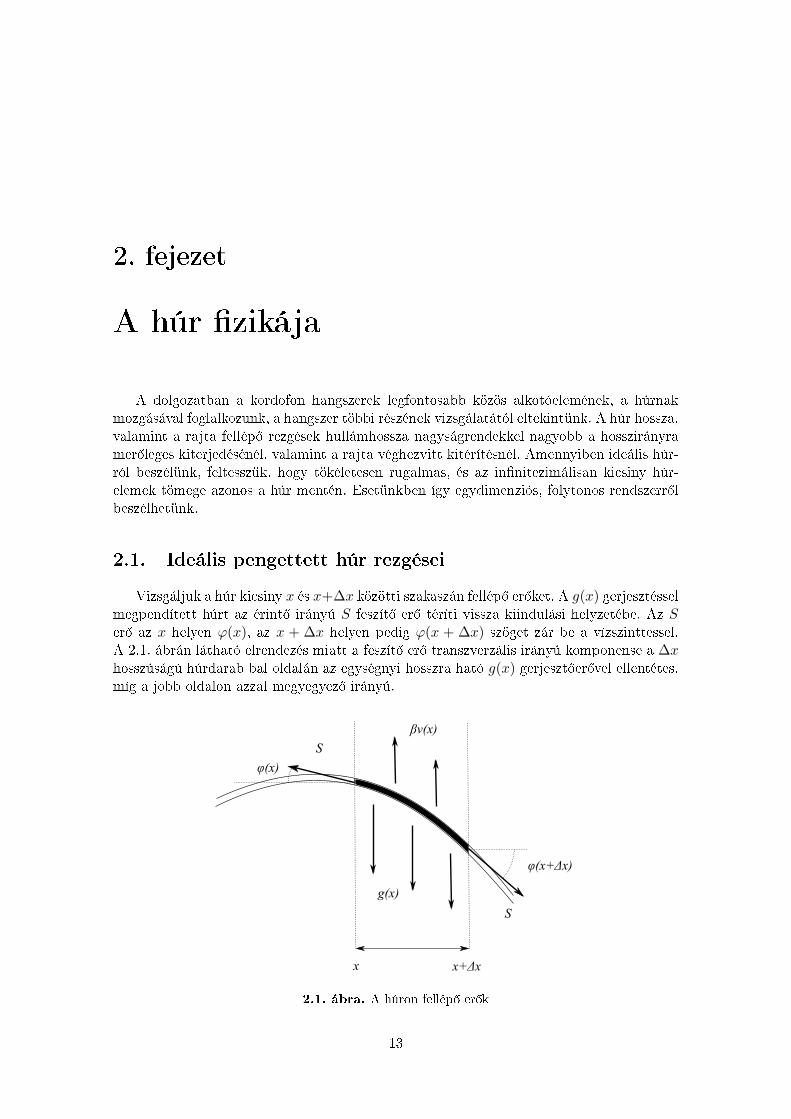
Vizsgáljuk a húr kicsiny x és x+∆x közötti szakaszán fellép® er®ket. A g(x) gerjesztésselmegpendített húrt az érint® irányú S feszít® er® téríti vissza kiindulási helyzetébe. Az Ser® az x helyen ϕ(x), az x + ∆x helyen pedig ϕ(x + ∆x) szöget zár be a vízszinttessel.A 2.1. ábrán látható elrendezés miatt a feszít® er® transzverzális irányú komponense a ∆xhosszúságú húrdarab bal oldalán az egységnyi hosszra ható g(x) gerjeszt®er®vel ellentétes,míg a jobb oldalon azzal megyegyez® irányú.
x x+Δx
S
S
g(x)
βv(x)
φ(x)
φ(x+Δx)
2.1. ábra. A húron fellép® er®k
13

Alkalmazzuk Newton második törvényét a húrelemre:
g(x)∆x+ S[
sinϕ(x+ ∆x)− sinϕ(x)]
= µ∆xa(x), (2.1)
ahol µ a húr hosszegységre es® tömege, a pedig a húr x helyen vett gyorsulása. A kisszögelfordulás esetén érvényes sinϕ ≈ ϕ közelítésekkel élve, az egyenletet ∆x-szel osztva,valamint a ∆x→ 0 határátmenetet elvégezve:
g(x) + S∂ϕ(x)
∂x= µa(x). (2.2)
További összefüggés kis szögelfordulás esetén, hogy ϕ ≈ tanϕ(x) = ∂u(x)∂x , ezt a (2.2)-be
helyettesítve, a sebességet a kitérés id® szerinti második deriváltjaként kifejezve g(x) = 0gerjesztésmentes esetben a transzverzális hullámok terjedésének leírására az alábbi egyen-letet kapjuk:
∂2u(x)
∂t2= c2∂
2u(x)
∂x2(2.3)
ahol c =√
Sµ a húrban terjed® transzverzális irányú kitéréshullám terjedési sebessége.
A (2.3) megoldását d'Alambert az
u(x) = f1(ct− x) + f2(ct+ x) (2.4)
alakban, vagyis két azonos sebességgel ellentétes irányban haladó tetsz®leges hullámalak(rendre f1 és f2) szuperpozíciójaként adta meg [2]. Az ideális lezárás azt a feltételt jelenti,hogy a kitérés a húr mindkét végén zérus, vagyis u(x = 0) = 0, illetve u(x = L) = 0.Amennyiben a véges húrt zéró kezdeti sebességr®l engedjük el, akkor az el®álló rezgésalakkét olyan hullám összege lesz, melyek azonos sebességgel ellentétes irányban mozognak,amplitúdójuk pedig a szuperponált hullámalak kezdeti kitérésének fele. A húrban fellép®összes rezgésalak felírható a teljes függvényrendszert alkotó módusalakok lineáris kombi-nációjaként. Az un(x) = sin knx módusalakokat
u(x, t) =∞∑n=1
Anun cos(ωnt+ ϑn) (2.5)
formában összegezzük, ahol An az n-edik módus amplitúdója, kn = nπL a hullámszáma, ωn
a körfrekvenciája, ϑn pedig a fázisa. A kapott rezgésalak burkolója a kezdeti húrpozícióáltal kifeszített parallelogramma.
A felharmonikusok1 súlyát L hosszúságú húr esetén az
Un =2
L
∫ L
0u0(x) sin knx dt =
2L2
π2x0(L− x0)
1
n2sin knx0 (2.6)
összefüggés segítségével kapjuk meg. A módusok amplitúdója négyzetesen csökken, a tri-gonometrikus tag miatt pedig az egységnyi hosszúságú, 1
x -énél megpengetett húr, mindenn · x-edik módusa hiányzik a spektrumból [5].
1Mivel ideális húrban a módusfrekvenciák harmonikusak, így joggal beszélhetünk felharmonikusokról a
módusok helyett.
14

2.2. Csillapított ideális húr
A húrok csillapítása általánosságban három zikai jelenségb®l adódik: viszkózus csilla-pításból, elasztikus veszteségb®l és nemideális lezárások miatt.
2.2.1. Viszkózus csillapítás
A rezg® húr nem jó hangsugárzó, azaz önmagában csak alacsony hatásfokkal képeshangteljesítmény átadására. Ennek oka, hogy a húr dipól forrásként viselkedik, mozgásaközben az el®tte lév® leveg®t összenyomja, a mögötte hagyott leveg®ben ritkulást idéz el®,ám sugara olyan kicsi, hogy az említett a hatások gyakorlatilag kiegyenlítik egymást. Ezazonban nem jelenti azt, hogy a húrnak leveg®vel való érintkezésének hatása, a surlódáselhanyagolható lenne. A húr körül fellép® viszkózus leveg®áramlás esetünkben a csillapításf® kiváltó oka.
Stokes szerint a húrban fellép® er®nek két komponense van, az egyik egy hozzáadotttömegszer¶ teher, mely a modális frekvenciákat enyhén csökkenti, a másik az amplitúdó-ban okoz exponenciális csökkenést. Az L hosszúságú, r sugarú, v sebességgel mozgó körkeresztmetszet¶ testre ható viszkózus er® f frekvencián
Fr = 2π2ρafvn2L
(√2
M+
1
2M2
), (2.7)
ahol ρa a leveg® s¶r¶sége, M pedig egy a húroknál tipkusan 0,3 és 1 között változó érték.Mivel F arányos v-vel, a mozgási energiával , tehát a sebesség négyzetével arányosanváltozik. Adott frekvencián az amplitúdó exponenciálisan csökken
τ1 =ρ
2πρaf
2M2
2√
2M + 1(2.8)
id®állandóval. M a frekvencia gyökével arányos, ezért, ha a frekvencia nullához közelít, azid®állandó konstans lesz, ha pedig a frekvencia a végtelenbe tart, az id®állandó 1√
f-fel lesz
arányos.
2.2.2. Elasztikus veszteség
Minden valós anyag megfeszítése esetén olyan elasztikus viselkedést mutat, melyneksorán azonnali megnyúlás történik, majd egy jellemz® τ id® múlva a megnyúlás némilegn®. Viszkoelasztikus anyagokban a második megnyúlás lassan de korlát nélkül emelkedik.Ilyenfajta viselkedés a Young-modulus komplexszé alakításával fejezhet® ki: E = E1 + iE2.Ezt a mozgásegyenletbe helyettesítve megkapjuk az elasztikus veszteség id®állandójának
τ2 =1
πf
E1
E2(2.9)
képletét.
2.2.3. Nemideális lezárás
Egy húr adott n módusa esetén a lezárással közölt sebesség
vn = αGFn (2.10)
15
alakban írható, melyben Fn az er® függ®leges komponense, G a konduktancia, α pedigkonstans. Fletcher az energiaveszteséget az amplitúdó exponenciális csökkenésével, az id®-állandót pedig
τ3 =1
8µLf2G(2.11)
formában adja meg [6].
2.2.4. Módosított egyenlet
Amennyiben mindhárom fent említett mechanizmus szerepet játszik a csillapításban,azok ered®jét reciprokösszegük segítségével adhatjuk meg:
1
τ=
1
τ1+
1
τ2+
1
τ3. (2.12)
Vékony fémhúrok esetén az elasztikus veszteségb®l, valamint a nemideális lezárásból fakadócsillapítás elhanyagolható, így elegend® a viszkózus csillapítás hatását gyelembe vennünk.A (2.2) egyenlet kiegészítéseként egy a kitérés els® deriváltját β csillapítási tényez®velszorzó tag reprezentálja a viszkozitást.
µ∂2u(x)
∂t2+ β
∂u(x)
∂t− S∂
2u(x)
∂x2= g(x). (2.13)
2.3. Hajlító rezgések
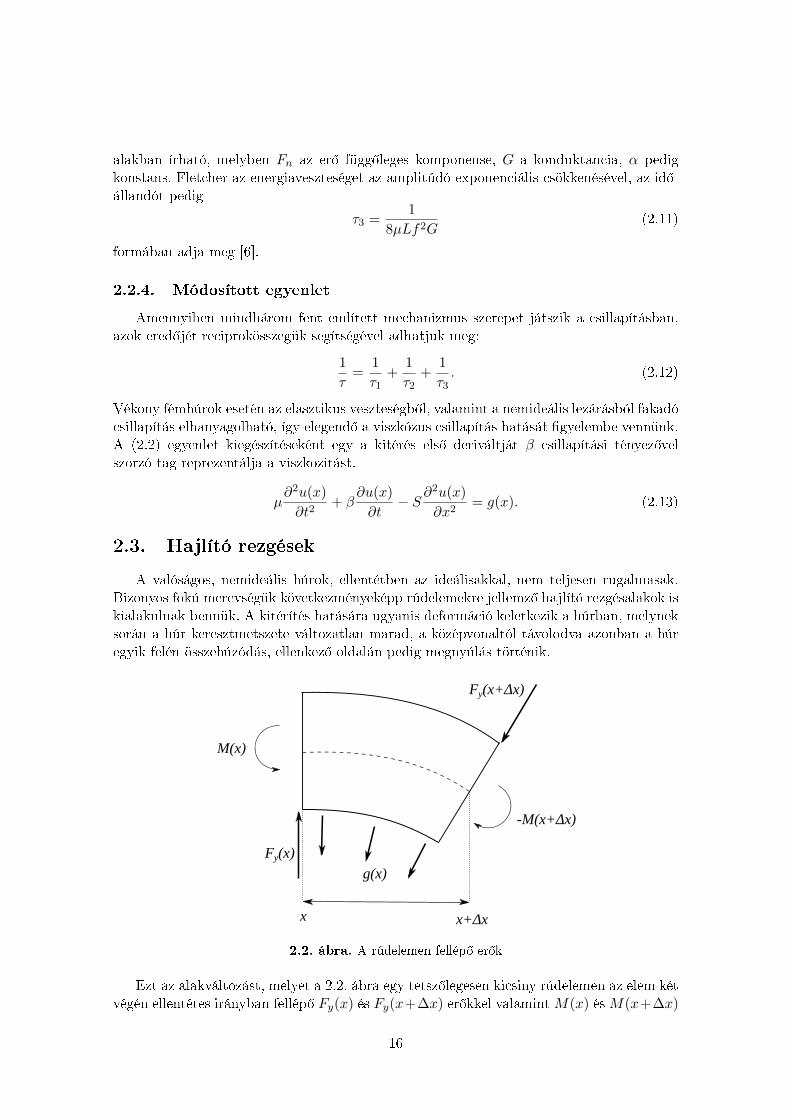
A valóságos, nemideális húrok, ellentétben az ideálisakkal, nem teljesen rugalmasak.Bizonyos fokú merevségük következményeképp rúdelemekre jellemz® hajlító rezgésalakok iskialakulnak bennük. A kitérítés hatására ugyanis deformáció keletkezik a húrban, melyneksorán a húr keresztmetszete változatlan marad, a középvonaltól távolodva azonban a húregyik felén összehúzódás, ellenkez® oldalán pedig megnyúlás történik.
x x+Δx
M(x)
-M(x+Δx)
Fy(x)
Fy(x+Δx)
g(x)
2.2. ábra. A rúdelemen fellép® er®k
Ezt az alakváltozást, melyet a 2.2. ábra egy tetsz®legesen kicsiny rúdelemen az elem kétvégén ellentétes irányban fellép® Fy(x) és Fy(x+∆x) er®kkel valamintM(x) ésM(x+∆x)
16

forgatónyomatékokkal szemléltethetjük. Az említett er®ket Newton második törvényébehelyettesítve
g(x)∆x+ Fy(x+ ∆x)− Fy(x) = ρA∆xa(x). (2.14)
A ∆x-szel osztva, ∆x→ 0 határátmenettel az alábbi összefüggés adódik:
g(x) +∂Fy(x)
∂x= ρAa(x). (2.15)
Mivel a rúdelem teljes nyomatéka zérus, az
∂M(x)
∂x+ Fy(x) = 0 (2.16)
fejezhetjük ki a fellép® er®vel való kapcsolatát. Ezt a (2.15)-be helyettesítve:
g(x)− ∂2M(x)
∂x2= ρAa(x). (2.17)
A rúdelemeken fellép® nyomatékok teljes felületre vett integrálja a Hooke-törvény megfon-tolásaival:
M(x) =
∫A
dM(x, y) =
∫AEy2∂
2u(x)
∂x2dA = EI
∂2u(x)
∂x2, (2.18)
ahol E a Young-modulus, I =∫A
y2 dA pedig az y irányú hajtással szemben támasztott
másodrend¶ nyomaték, más néven inercia. Kör keresztmetszet¶ rudakban, mint esetünkbenis, a középvonalra vonatkoztatott nyomaték számítása polárkoordináta rendszerben y =r sin θ és dA = rdrdθ a következ®:
I =
∫ 2π
0
∫ R
0r2 sin2 θr drdθ =
=
∫ 2π
0
1− cos 2θ
2dθ
∫ R
0r2r dr.
(2.19)
Mivel a koszinuszos tag integrálja a teljes 2π perióduson nulla:
I =
∫ 2π
0
1
2dθ
[r4
4
]R0
=R4π
4. (2.20)
A rudak hajlító rezgéseit leíró mozgásegyenlet tehát
g(x)− EI ∂4u(x)
∂x4= ρA
∂2u(x)
∂t2. (2.21)
2.4. Merev húr mozgásegyenlete
A (2.2) és a (2.21) egyenletek összekapcsolásával kapjuk a nemideális véges merevség¶húr mozgásegyenletét:
µ∂2u
∂t2− S∂
2u
∂x2+ EI
∂4u
∂x4= g. (2.22)
Amennyiben mind térben, mind id®ben harmonikus a megoldás
u(x, t) = U sin kx sin(ωt+ ϕ), (2.23)
17

amit a gerjesztésmentes (g(x, ω) ≡ 0) húregyenletbe helyettesítve a diszperzióegyenletetkapjuk:
Sk2 + EIk4 = µω2. (2.24)
Ha a húr az n-edik módusban rezeg, akkor az L hosszra n félhullám esik, vagyis k = nπL , a
körfrekvencia pedig
ω2n =
S
µ
(k2 +
EI
Sk4
), (2.25)
az ismert c sebesség bevezetésével
ωn =ncπ
L
√1 +
EI
S
(nπL
)2= nω0
1
√1 +Bn2, (2.26)
ahol ω01 az ideális húr alapfrekvenciája,
B =π2EI
SL2(2.27)
pedig a húr inharmonicitási állandója, melyet kör keresztmetszet¶ húr esetén a
B =π3Ed4
64SL2(2.28)
képlet ad meg [5].
2.5. Merev, csillapított húr mozgásegyenlete
A fejezetben említetteket átgondolva kapjuk meg végül a merev húr csillapítás gyel-mebevételével felírt mozgásegyenletét:
µ∂2u
∂t2+ β
∂u
∂t− S∂
2u
∂x2+ EI
∂4u
∂x4= g. (2.29)
A negyedrend¶ összetev® miatt a hullám terjedésének sebessége frekvenciafügg®vé válik. Acsoportsebesség a frekvencia gyökével lesz arányos (vcs ∝
√ω), diszperzió lép fel. A maga-
sabb felharmonikusok ezáltal gyorsabban terjednek a húrban, így frekvenciájuk is maga-sabb lesz, mint ideális húr esetén.
18
3. fejezet
A végeselem módszer
A munka során a problémát a végeselem módszer segítségével szimuláltuk. A programMatlab környezetben készült el, teljesen az alapoktól. Ebben a fejezetben áttekintjük amódszer elméleti alapjait az idézett források segítségével, majd bemutatjuk alkalmazásátaz el®z® fejezetben vázolt zikai jelenségekre.
A végeselem módszer egy parciális dierenciálegyenletek közelít® megoldására szolgálónumerikus eljárás. A metódus a véges tartományt egymással csomópontjaikon kapcsolódóvéges számú elemre bontja, a megoldást pedig az intervallumra deniált ortogonális alak-függvények segítségével állítja el®.
3.1. Alapok
Általános esetben az
Au(x) = f(x) (3.1)
dierenciálegyenlet, valamint a hozzá tartozó
Bu(x) = g(x) (3.2)
peremfeltétel által meghatározott u(x) megoldásfüggvényt keressük. A és B dierenciál-operátorok, f(x) a tartományon felírt gerjesztés, g(x) pedig egy ismert függvény. Hogy aproblémát numerikus módon vizsgálhassuk, diszkretizálással a dierenciálegyenleteket li-neáris algebrai egyenletrendszerré alakítjuk, melyet a Galjorkin-módszer segítségével tehe-tünk meg. A megoldásfüggvényt a tartományon felírt véges számú alakfüggvények lineáriskombinációjaként állítjuk el®:
u(x) ≈n∑i=1
Ni(x)ui, (3.3)
ahol Ni alakfüggvény ui pedig a kitérés. A közelítés pontossága az alakfüggvények szabad-ságfokainak számával növelhet®. Ezeket az alakfüggvényeket úgy igyekszünk megválasztani,hogy lehet®ség szerint ortogonálisak legyenek egymásra.
Az els® lépés a dierenciálegyenlet követelményeinél gyengébb feltételeket el®író ún.gyenge alak el®állítása. Ezt követ®en az analitikus függvényt vektorok segítségével közelít-jük, rendszerleíró mátrixokat hozunk létre, így térben diszkretizálva a problémát. Az utolsólépés a rendszer id®tartományban történ® diszkretizálása [4].
19
3.2. Az ideális, csillapított húr végeselem modellje
3.2.1. A gyenge alak
Állítsuk el® a csillapított húr
µu(x) + βu(x)− S∂2u(x)
∂x2= g(x) (3.4)
mozgásegyenletének gyenge alakját. El®ször szorozzuk az egyenlet mindkét oldalát vala-mely φ(x) tesztfüggvénnyel, majd integráljuk a zárt Ω tartományon:∫
Ωµφ(x)u(x) dx+
∫Ωβφ(x)u(x) dx−
∫ΩSφ(x)
∂2u(x)
∂x2dx =
∫Ωφ(x)g(x) dx. (3.5)
A bal oldal harmadik tagját parciálisan integrálva:∫Ωµφ(x)u(x) dx+
∫Ωβφ(x)u(x) dx+
∫ΩS∂φ(x)
∂x
∂u(x)
∂xdx−
[∂u(x)
∂xφ(x)
]L0
=
=
∫Ωφ(x)g(x) dx. (3.6)
A kivonandó tag a befogási kényszer miatt zérus.
3.2.2. Közelítés
Közelítsük u(x)-et, u(x)-et és u(x)-et az
u(x) ≈∑
iNi(x)ui = N(x)u (3.7a)
u(x) ≈∑
iNi(x)ui = N(x)u (3.7b)
u(x) ≈∑
iNi(x)ui = N(x)u (3.7c)
formában, N sorvektor és u oszlopvektor segítségével. Ekkor Ni(x) az i-edik alakfüggvényx pontban felvett értékét, ui pedig az ehhez az alakfüggvényhez tartozó súlyt jelenti [14].
A (3.6)-ba helyettesítve∫Ωµφ(x)N(x)udx+
∫Ωβφ(x)N(x)udx+
∫ΩS∂φ(x)
∂x
∂N(x)
∂xudx =
∫Ωφ(x)g(x) dx. (3.8)
A (3.8)-nak tetsz®leges φ-re teljesülnie kell. A Galjorkin-módszer szerint a φ(x) tesztfügg-vényt is az alakfüggvények lineáris kombinációjaként állítjuk el®:
φ(x) = N(x)φ = φTN(x)T, (3.9)
melyet a (3.8)-be helyettesítve adódik a∫ΩµφTN(x)TN(x)u dx+
∫ΩβφTN(x)TN(x)udx+
+
∫ΩSφT∂N(x)T
∂x
∂N(x)
∂xudx =
∫ΩφTN(x)Tg(x) dx (3.10)
20

egyenlet.Vegyük észre, hogy a (3.10) φT-vel egyszer¶síthet®, mivel φT tetsz®leges konstans. Ezt
elvégezve, valamint a g ≈∑
iNi(x)gi összefüggéssel élve a∫ΩµN(x)TN(x)udx+
∫ΩβN(x)TN(x)udx+
+
∫ΩS∂N(x)T
∂x
∂N(x)
∂xudx =
∫ΩN(x)TN(x)g dx (3.11)
egyenletre jutunk. A kapott egyenlet összeadandó tagjait szimmetrikus mátrixokba rendez-hetjük, amelyekre a továbbiakban rendszerleíró mátrixokként tekintünk. A rendszerleírómátrixok tehát az alábbi integrálok kiszámításával állnak el®:
M =
∫ΩµN(x)TN(x) dx, (3.12a)
C =
∫ΩβN(x)TN(x) dx, (3.12b)
K =
∫ΩS∂N(x)T
∂x
∂N(x)
∂xdx, (3.12c)
A =
∫ΩN(x)TN(x) dx. (3.12d)
A rendszerleíró egyenlet pedig mátrix formában:
Mu + Cu + Ku = Ag. (3.13)
3.2.3. Térbeli diszkretizáció
Modellünket el®ször geometriailag bontjuk véges számú elemre. Az Ω értelmezési tar-tományon n csomópontot határozunk meg, melyek n− 1 egymással csak csomópontjaikonérintkez® elemeket deniálnak. Ahhoz, hogy a kitérését közelíteni tudjuk, n számú alak-függvényekre van szükségünk. Ezeket úgy választjuk meg, hogy Ni alakfüggvény csak xicsomópontban 1 érték¶, a többi xj (j 6= i) pontban 0. Az Ω tartomány felbontása tehát
Ω =
n⋃i=1
Ωi, (3.14)
ahol Ωi⋂
Ωj = ∅, amennyiben i 6= j.Mivel minden alakfüggvényhez egy súlyérték tartozik, az alakfüggvények n száma egy-
ben meghatározza a diszkrét rendszer változóinak, a szabadságfokoknak a számát is. Álta-lánosan igaz, hogy a szabadságfokok számának növelésével a számítási komplexitás növe-kedésének árán növelhet® a numerikus megoldás pontossága.
A (3.11) gyenge egyenlet megoldásához a legegyszer¶bb lineáris alakfüggvényeket vá-lasztani. Ilyenkor minden elemhez két lokális alakfüggvény tartozik, és az elemekhez 2×2-esMe, Ce, Ke, Ae elemmátrixok adódnak. Az elemeket úgy f¶zzük össze, hogy az els® elemmásodik csomópontja a második elem els® csomóponja lesz, és így tovább. Ez a mátrixokosszeállításánál a következ® módon valósul meg, példaként az M tömegmátrixra:
21

M =
Me1,11 Me1,12 0 . . . 0Me1,21 Me1,22 +Me2,11 Me2,12 . . . 0
0 Me2,21 Me2,22 +Me3,11 . . . 0...
......
. . ....
0 0 0 . . . Men,22
. (3.15)
3.2.4. Id®beli diszkretizáció
Az id®tartományon való diszkretizáláshoz az ún. Newmark-sémát [9, 3] használjuk.Induljunk ki a Galjorkin-módszer segítségével kapott (3.13) egyenlet mátrixos alakjából.Az id®lépés kezdeti feltétele, hogy a g gerjesztés zérus legyen. A kezdeti u ismert, mivel ahúr alakja adott, az u és u pedig a pengetés közelítése miatt nulla érték¶ek.
Tegyük fel, hogy az n-edik lépésben ismert a megoldás. Ekkor a Newmark-séma szerint
un+1 = un + ∆t [(1− γH)un + γH un+1] , (3.16)
un+1 = un + ∆tun +∆t2
2[(1− 2βH)un + 2βH un+1] . (3.17)
A βH és a γH a deriváltak közelítéséhez alkalmazott kétoldali súlyozást határozza meg,kedvelt választás a γH = 0,5, β = 0,25 értékek használata, melyet jelen dolgozatban isalkalmazunk. A (3.13)-be helyettesítve
Mun+1 + C [un + ∆t [(1− γH)un + γH un+1]] +
+ K
[un + ∆tun +
∆t2
2[(1− 2βH)un + 2βH un+1]
]= 0. (3.18)
Az egyenletet átrendezve[M + ∆tγHC + ∆t2βHK
]un+1 = −Kun − (∆tK + C)un −
−[K
∆t2
2(1− 2βH) + C∆t(1− γH)
]un. (3.19)
LegyenM∗ =
[M + ∆tγHC + ∆t2βHK
], (3.20)
ezáltal a (3.19) un+1-re rendezve:
un+1 = M∗−1
[−Kun−(∆t+K+C)un−
[K
∆t2
2(1− 2βH) + C∆t(1− γH)
]un
]. (3.21)
Miután un+1-t és un+1-t a (3.16) és a (3.17) alapján megkapjuk, továbbléphetünk a kö-vetkez® id®pillanatra.
A ∆t id®lépés megválasztásakor, ahhoz, hogy a rendszerünk numerikusan stabil legyen,ki kell elégítenünk a
c∆t < minLe (3.22)
követelményt, ami annyit tesz, hogy a terjed® hullámforma egy id®lépés alatt nem haladhattöbbet, mint a legkisebb elem mérete.
22

3.3. A nemideális húr végeselem modellje
A húr zikája cím¶ fejezetben már említésre került a merev húr mozgásegyenlete:
µu+ βu− S∂2u
∂x2+ EI
∂4u
∂x4= g. (3.23)
Ennek gyenge alakja az ismert módon el®állítva, az összeg utolsó tagját kétszer parciálisanintegrálva:∫
µφNudx+
∫βφNudx−
∫S∂φ
∂x
∂N
∂xudx+
∫EI
∂2φ
∂x2
∂2N
∂x2udx =
∫φg dx. (3.24)
A Galjorkin-módszer alkalmazásakor ezúttal még egy
R =
∫ΩEI
∂2N(x)T
∂x2
∂2N(x)
∂x2dx (3.25)
mátrixszal b®vül rendszerünk. A (3.21) egyenlet annyiban módosul, hogy KR = K + Regyenlettel dolgozunk nemideális esetben.
3.4. Kényszerek és peremfeltételek
A húr mozgásának szimulációjában fontos lépés a húr rögzítésének modellezése. Eztbefogási kényszerek segítségével tehetjük meg, melyek alkalmazásakor a rendszer egyesszabadságfokainak, vagy egyes szabadságokok lineáris kombinációjainak értékét rögzítjük.
3.1. ábra. Master (kék) és slave (piros) szabadságfokok a húron
A rendszer szabadságfokait két halmazra, um független (master) és us függ® (slave)kitérésekre bontjuk. Ezt mutatja a 3.1. ábra. Egy n egyenletet tartalmazó lineáris rend-szerbenm ≤ n kényszeregyenlet esetén a kényszermátrixm×n-es. A felosztás slave kitéréseikifejezhet®ek a master kitérések ismeretében. Az
[As Am]
[usum
]= 0 (3.26)
formában írt egyenletAs mátrixam×m, mígAm mátrixam×(n−m) elemb®l áll. A függ®és független elmozdulások között az
us = −A−1s Amum (3.27)
23

egyenlet teremt kapcsolatot. A rendszer összes szabadságfokához tartozó érték a masterszabadságfokokból
u =
[usum
]=
[I
−A−1s Am
]um = Tcum (3.28)
formában határozható meg. A Tc transzformációs mátrixot kényszermátrixnak (constraintmatrix) is nevezhetjük.
Tekintsük a végeselem módszerrel kapott diszkrét mozgásegyenletünk mátrixegyenletétaz S rendszerleíró mátrixszal a
Su = 0 (3.29)
formában, amely a (3.28) alapjánSTcum = 0 (3.30)
alakra módosul. S∗ = TTc STc-t bevezetve kapjuk a
S∗um = TTc 0 (3.31)
egyenletet, ahol n helyett n−m szabadságfokkal rendelkezünk.
3.5. Alakfüggvények a nemideális modellben
Mivel a nemideális, diszperz húr mozgását leíró egyenlet negyedrend¶ dierenciálegyen-let, ezért legalább harmadfokú elemi alakfüggvényeket kell választanunk. Ebben az esetbenegy elemhez négy szabadságfok tartozik, az alakfüggvényeket pedig úgy választjuk meg,hogy az alábbi feltételek teljesüljenek:
N1 : N1(0) = 1 N1(L) = 0∂N1
∂x
∣∣∣∣0
= 0∂N1
∂x
∣∣∣∣L
= 0, (3.32a)
N2 : N2(0) = 0 N2(L) = 1∂N2
∂x
∣∣∣∣0
= 0∂N2
∂x
∣∣∣∣L
= 0, (3.32b)
N3 : N3(0) = 0 N3(L) = 0∂N3
∂x
∣∣∣∣0
= 1∂N3
∂x
∣∣∣∣L
= 0, (3.32c)
N4 : N4(0) = 0 N4(L) = 0∂N4
∂x
∣∣∣∣0
= 0∂N4
∂x
∣∣∣∣L
= 1. (3.32d)
Az alakfüggvényeket harmadfokú polinomként szimbolikusan felírva, a fenti egyenletekbehelyettesítve megkapjuk a megfelel® harmadfokú polinomokat, melyeket a 3.2. ábra mutat.
A véges merevség következtében a húr szögelfordulása x szerint folytonos kell legyen,ami azt jelenti, hogy a ∂u/∂x függvény az elemek között nem ugorhat, egy csomópont-hoz tehát egy u és egy ∂u/∂x érték tartozik. Így a fenti alakfüggvények választásával arendszermátrixok elemenkénti összerakásakor azt kapjuk, hogy a 4 × 4-es elemmátrixokjobb alsó és bal fels® 2 × 2-es blokkjai kerülnek összegzéses átfedésbe. A modell összesszabadságfokainak száma pedig a csomópontok számának kétszerese lesz, hiszen mindencsomóponthoz két változó tartozik. Az így kialakuló M tömegmátrix szerkezetét mutatjaa 3.3. ábra, látható a blokkok átfedése, illetve az is, hogy egyes elemek az összegzés soránellentétes el®jelük következtében kiejtik egymást.
24
0 0.2 0.4 0.6 0.8 1−0.25
0
0.25
0.5
0.75
1
1.25
Ala
kfüg
gvén
y ér
téke
k [−
]
Lokális x koordináta [Le]
3.2. ábra. A nemideális modell egy elemhez tartozó négy alakfüggvénye
2 4 6 8 10 12 14 16
2
4
6
8
10
12
14
16
Oszlopindex [−]
Sor
inde
x [−
]
3.3. ábra. Az M ritka tömegmátrix els® néhány sorának és oszlopának szerkezete
3.6. Kezdeti elmozdulás meghatározása
Nemideális húrmodellünknek több kezdeti feltételt is ki kell elégítenie. Az u(x) függ-vényt három pontban rögzítjük: u(x = 0) = 0 és u(x = L) = 0 jelenti a merev megfogásta húr két végén, u(x = xp) = U0 pedig a pengetési pozícióban megadott kezdeti kitérésthatározza meg. Ezenkívül a gondoskodnunk kell arról is, hogy a forgatónyomaték is zé-rus legyen az ideális lezárásoknál. Ekkor a kényszerfeltétleket meghatározó A mátrix (lásd(3.26) egyenlet) az alábbi formában áll el®:
A =
1 0 0 0 . . . 0 0 0 00 0 0 0 . . . 0 0 1 0a1 a2 a3 a4 . . . 0 0 0 00 0 0 0 . . . b1 b2 b3 b4
. (3.33)
25
0.198 0.2 0.202 0.204 0.206 0.208 0.21
9.94
9.96
9.98
10
10.02
x 10−4
x [m]
y [m
]
3.4. ábra. Merev húr kezdeti kitérése ideális pengetés esetén a pengetési pozíció közelében. A kékháromszögek a csomópontoknál felvett kitérés értékeket, a piros vonal pedig az alakfüggvényekszuperpozícióját kiértékelve kapott eredmény.
Mivel megfogott pontjaink indexei 1, 2, n−1 és n, ahol n a szabadságfokok száma, ezért azAmátrix elrendezésében az els® kett®, és az utolsó kett® oszlop a a slave szabadságfokokhoztartozó vektorok, a köztes oszlopok pedig a master szabadságfokokhoz tartoznak.
A (3.13) állandósult állapotban:
M0 + C0 + KRu = g, (3.34)
ahol g = 0 ideális pengetést feltételezve. A (3.30) és a (3.31) alapján KR mátrixra akövetkez® összefüggések adódnak:
KRTcum = 0 és (3.35)
TTc KRTcum = TT
c 0. (3.36)
A K∗ = TTKRT összefüggést bevezetve:
K∗um = 0. (3.37)
Particionáljuk a szabadságfokokhoz tartozó u állapotvektort két részre! Az u1 jelölje azismert master szabadságfokokat, melyeket a fent megadott peremfeltételek határoznak meg,u2 pedig a nem ismert master szabadságfokokat. A K∗ mátrix ismeretében u2-t a (3.37)egyenlet
K∗11u1 + K∗12u2 = 0
K∗21u1 + K∗22u2 = 0 (3.38)
alakú felbontásával fejezhetjük ki, melyb®l a megoldást az alábbi formában kapjuk:
u2 = −K∗22−1K∗21u1. (3.39)
A megoldást szemlélteti a 3.4. ábra, melyen látható, hogy az elemek belsejében kiérté-kelve az alakfüggvényeket olyan kitérésalakot kapunk eredményül, mely eleget tesz a zikaimodell által meghatározott folytonossági feltételnek. (Ha csak a csomópontokban felvettértékeket kötjük össze egyenes vonalakkal, akkor ez nem látható, ezt szemléltetik az ábrána kék háromszögek és a köztük futó folytonos kék vonal.)
26
4. fejezet
Eredmények
Ebben a fejezetben megtekintjük a modell m¶ködését a gyakorlatban. El®ször egy ideá-lis húr modelljét vizsgáljuk meg, az id®tartománybeli szimulációt az analitkus megoldássalhasonlítjuk össze. Ezek után megmutatjuk a csillapítás hatását, végül pedig a diszperz húrmodellezésének eredményeit értékeljük ki. A fejezetben nem az összes eredmény megmu-tatására törekszünk, hanem azt bizonyítjuk, hogy az el®z® fejezetekben ismert modell agyakorlatban is jól m¶ködik, képes a kit¶zött cél elérésére, a diszperzió megfelel® pontos-ságú modellezésére.
A következ® példákban egy 1 m hosszú acélhúrt 1/5-énél pengetünk meg, úgy hogy amaximális kitérés 1 mm legyen, majd az álló állapotból elegendett húr viselkedését model-lezzük. A húr anyagjellemz®it úgy választottuk meg, hogy azok egy gitárhúréhoz hasonlít-sanak. Az ideális és a diszperz esetben is úgy választottuk meg az elemek számát, hogy aszabadságfokok száma 1000 legyen.
4.1. Az ideális húr
4.1.1. Összehasonlítás az analitikus megoldással
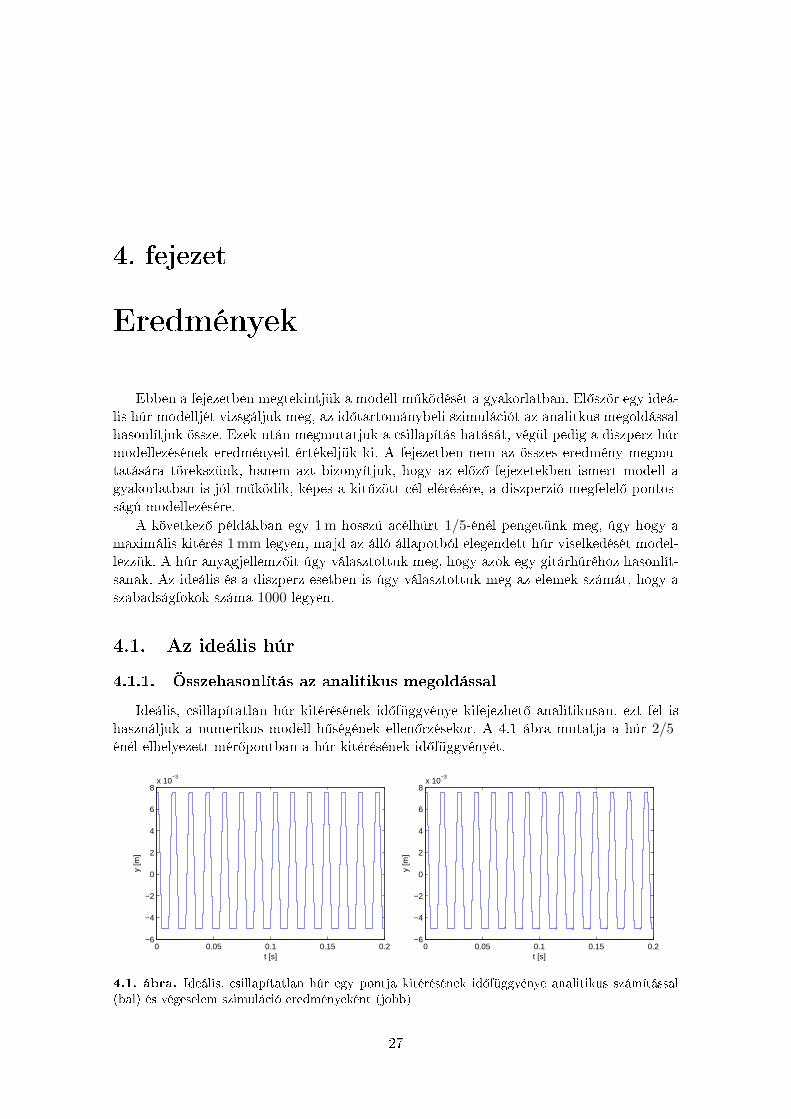
Ideális, csillapítatlan húr kitérésének id®függvénye kifejezhet® analitikusan, ezt fel ishasználjuk a numerikus modell h¶ségének ellen®rzésekor. A 4.1 ábra mutatja a húr 2/5-énél elhelyezett mér®pontban a húr kitérésének id®függvényét.
0 0.05 0.1 0.15 0.2−6
−4
−2
0
2
4
6
8x 10
−3
t [s]
y [m
]
0 0.05 0.1 0.15 0.2−6
−4
−2
0
2
4
6
8x 10
−3
t [s]
y [m
]
4.1. ábra. Ideális, csillapítatlan húr egy pontja kitérésének id®függvénye analitikus számítással(bal) és végeselem szimuláció eredményeként (jobb)
27
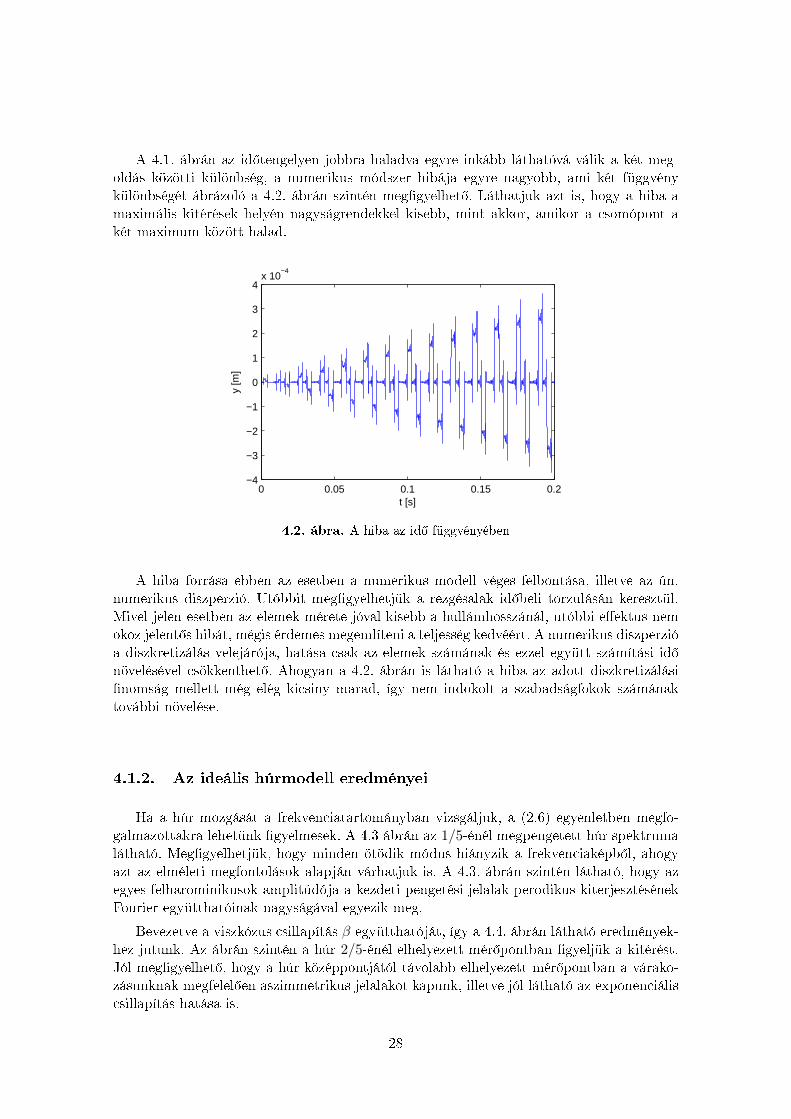
A 4.1. ábrán az id®tengelyen jobbra haladva egyre inkább láthatóvá válik a két meg-oldás közötti különbség, a numerikus módszer hibája egyre nagyobb, ami két függvénykülönbségét ábrázoló a 4.2. ábrán szintén meggyelhet®. Láthatjuk azt is, hogy a hiba amaximális kitérések helyén nagyságrendekkel kisebb, mint akkor, amikor a csomópont akét maximum között halad.
0 0.05 0.1 0.15 0.2−4
−3
−2
−1
0
1
2
3
4x 10
−4
t [s]
y [m
]
4.2. ábra. A hiba az id® függvényében
A hiba forrása ebben az esetben a numerikus modell véges felbontása, illetve az ún.numerikus diszperzió. Utóbbit meggyelhetjük a rezgésalak id®beli torzulásán keresztül.Mivel jelen esetben az elemek mérete jóval kisebb a hullámhosszánál, utóbbi eektus nemokoz jelent®s hibát, mégis érdemes megemlíteni a teljesség kedvéért. A numerikus diszperzióa diszkretizálás velejárója, hatása csak az elemek számának és ezzel együtt számítási id®növelésével csökkenthet®. Ahogyan a 4.2. ábrán is látható a hiba az adott diszkretizálásinomság mellett még elég kicsiny marad, így nem indokolt a szabadságfokok számánaktovábbi növelése.
4.1.2. Az ideális húrmodell eredményei
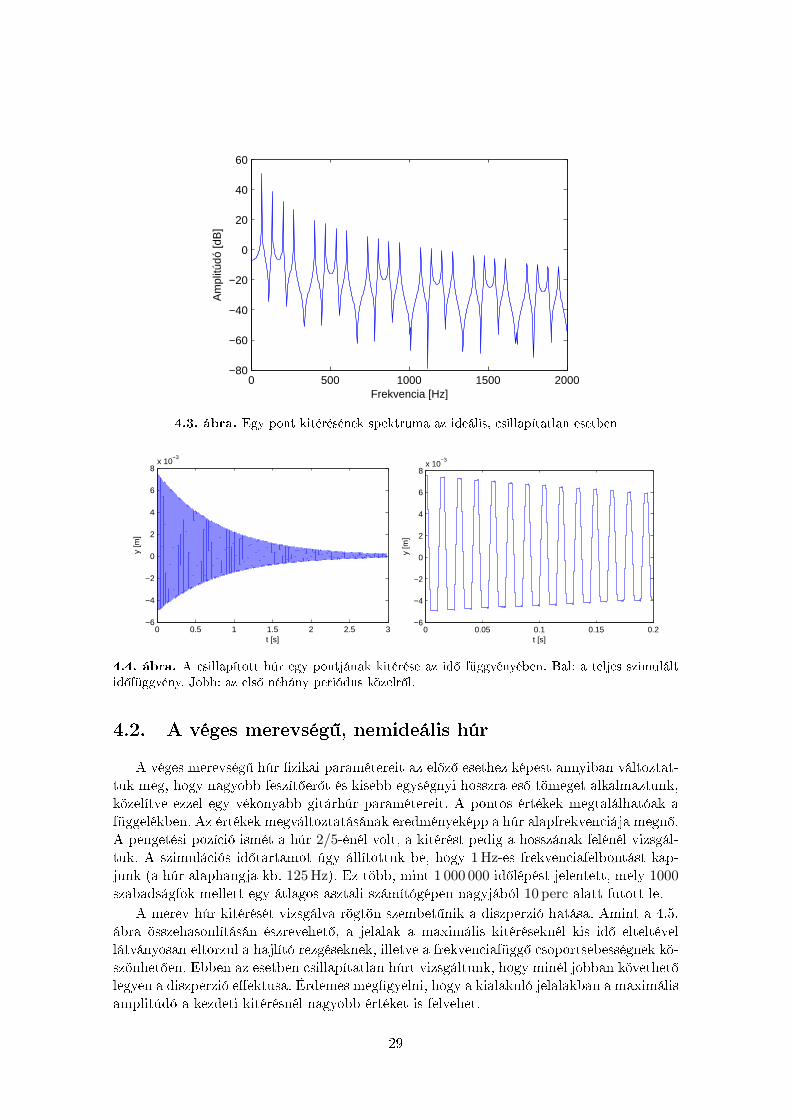
Ha a húr mozgását a frekvenciatartományban vizsgáljuk, a (2.6) egyenletben megfo-galmazottakra lehetünk gyelmesek. A 4.3 ábrán az 1/5-énél megpengetett húr spektrumalátható. Meggyelhetjük, hogy minden ötödik módus hiányzik a frekvenciaképb®l, ahogyazt az elméleti megfontolások alapján várhatjuk is. A 4.3. ábrán szintén látható, hogy azegyes felharominikusok amplitúdója a kezdeti pengetési jelalak perodikus kiterjesztésénekFourier-együtthatóinak nagyságával egyezik meg.
Bevezetve a viszkózus csillapítás β együtthatóját, így a 4.4. ábrán látható eredmények-hez jutunk. Az ábrán szintén a húr 2/5-énél elhelyezett mér®pontban gyeljük a kitérést.Jól meggyelhet®, hogy a húr középpontjától távolabb elhelyezett mér®pontban a várako-zásunknak megfelel®en aszimmetrikus jelalakot kapunk, illetve jól látható az exponenciáliscsillapítás hatása is.
28
0 500 1000 1500 2000−80
−60
−40
−20
0
20
40
60
Frekvencia [Hz]
Am
plitú
dó [d
B]
4.3. ábra. Egy pont kitérésének spektruma az ideális, csillapítatlan esetben
0 0.5 1 1.5 2 2.5 3−6
−4
−2
0
2
4
6
8x 10
−3
t [s]
y [m
]
0 0.05 0.1 0.15 0.2−6
−4
−2
0
2
4
6
8x 10
−3
t [s]
y [m
]
4.4. ábra. A csillapított húr egy pontjának kitérése az id® függvényében. Bal: a teljes szimuláltid®függvény. Jobb: az els® néhány periódus közelr®l.
4.2. A véges merevség¶, nemideális húr
A véges merevség¶ húr zikai paramétereit az el®z® esethez képest annyiban változtat-tuk meg, hogy nagyobb feszít®er®t és kisebb egységnyi hosszra es® tömeget alkalmaztunk,közelítve ezzel egy vékonyabb gitárhúr paramétereit. A pontos értékek megtalálhatóak afüggelékben. Az értékek megváltoztatásának eredményeképp a húr alapfrekvenciája megn®.A pengetési pozíció ismét a húr 2/5-énél volt, a kitérést pedig a hosszának felénél vizsgál-tuk. A szimulációs id®tartamot úgy állítottuk be, hogy 1 Hz-es frekvenciafelbontást kap-junk (a húr alaphangja kb. 125 Hz). Ez több, mint 1 000 000 id®lépést jelentett, mely 1000szabadságfok mellett egy átlagos asztali számítógépen nagyjából 10 perc alatt futott le.
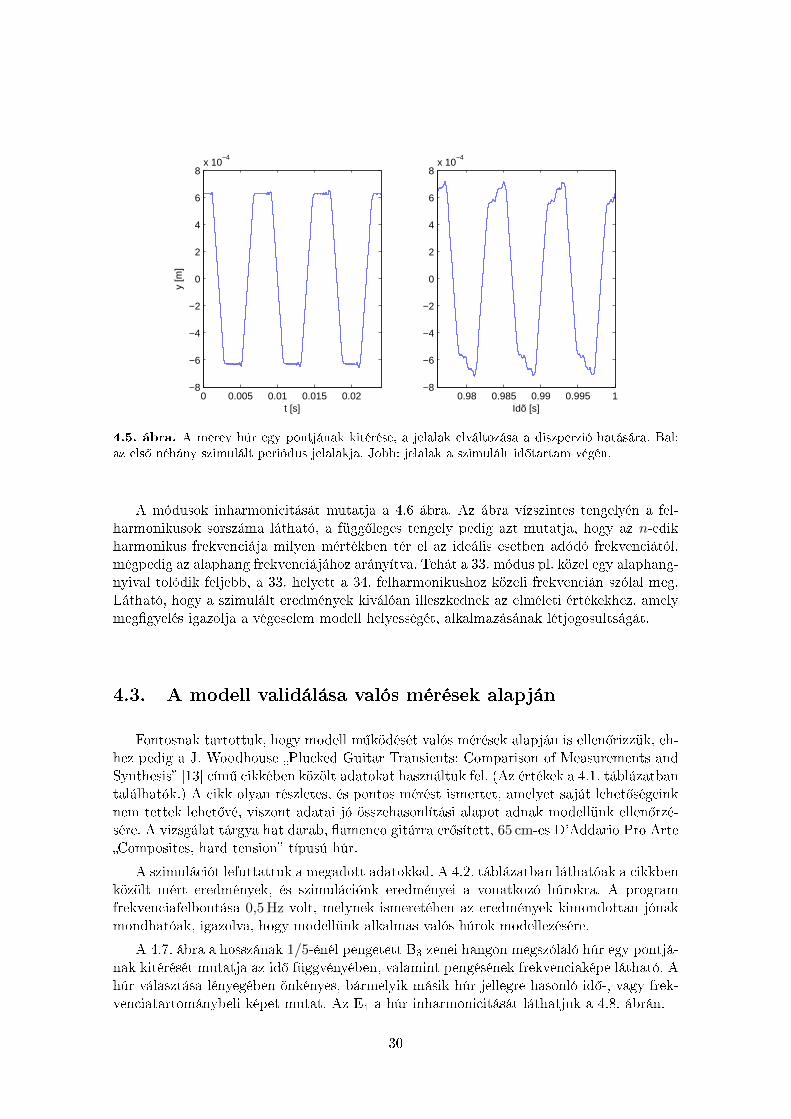
A merev húr kitérését vizsgálva rögtön szembet¶nik a diszperzió hatása. Amint a 4.5.ábra összehasonlításán észrevehet®, a jelalak a maximális kitéréseknél kis id® elteltévellátványosan eltorzul a hajlító rezgéseknek, illetve a frekvenciafügg® csoportsebességnek kö-szönhet®en. Ebben az esetben csillapítatlan húrt vizsgáltunk, hogy minél jobban követhet®legyen a diszperzió eektusa. Érdemes meggyelni, hogy a kialakuló jelalakban a maximálisamplitúdó a kezdeti kitérésnél nagyobb értéket is felvehet.
29
0 0.005 0.01 0.015 0.02−8
−6
−4
−2
0
2
4
6
8x 10
−4
y [m
]
t [s]0.98 0.985 0.99 0.995 1
−8
−6
−4
−2
0
2
4
6
8x 10
−4
Idõ [s]
4.5. ábra. A merev húr egy pontjának kitérése, a jelalak elváltozása a diszperzió hatására. Bal:az els® néhány szimulált periódus jelalakja. Jobb: jelalak a szimulált id®tartam végén.
A módusok inharmonicitását mutatja a 4.6 ábra. Az ábra vízszintes tengelyén a fel-harmonikusok sorszáma látható, a függ®leges tengely pedig azt mutatja, hogy az n-edikharmonikus frekvenciája milyen mértékben tér el az ideális esetben adódó frekvenciától,mégpedig az alaphang frekvenciájához arányítva. Tehát a 33. módus pl. közel egy alaphang-nyival tolódik feljebb, a 33. helyett a 34. felharmonikushoz közeli frekvencián szólal meg.Látható, hogy a szimulált eredmények kiválóan illeszkednek az elméleti értékekhez, amelymeggyelés igazolja a végeselem modell helyességét, alkalmazásának létjogosultságát.
4.3. A modell validálása valós mérések alapján
Fontosnak tartottuk, hogy modell m¶ködését valós mérések alapján is ellen®rizzük, eh-hez pedig a J. Woodhouse Plucked Guitar Transients: Comparison of Measurements andSynthesis [13] cím¶ cikkében közölt adatokat használtuk fel. (Az értékek a 4.1. táblázatbantalálhatók.) A cikk olyan részletes, és pontos mérést ismertet, amelyet saját lehet®ségeinknem tettek lehet®vé, viszont adatai jó összehasonlítási alapot adnak modellünk ellen®rzé-sére. A vizsgálat tárgya hat darab, amenco gitárra er®sített, 65 cm-es D'Addario Pro ArteComposites, hard tension típusú húr.
A szimulációt lefuttattuk a megadott adatokkal. A 4.2. táblázatban láthatóak a cikkbenközölt mért eredmények, és szimulációnk eredményei a vonatkozó húrokra. A programfrekvenciafelbontása 0,5 Hz volt, melynek ismeretében az eredmények kimondottan jónakmondhatóak, igazolva, hogy modellünk alkalmas valós húrok modellezésére.
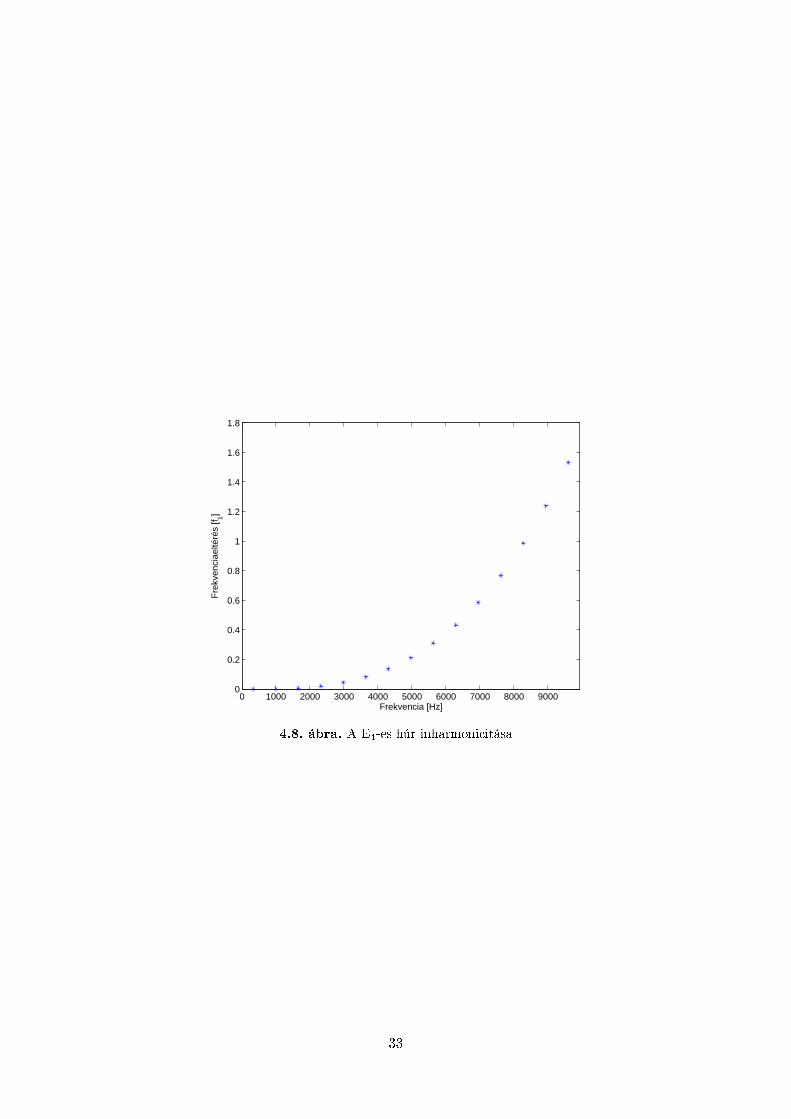
A 4.7. ábra a hosszának 1/5-énél pengetett B3 zenei hangon megszólaló húr egy pontjá-nak kitérését mutatja az id® függvényében, valamint pengésének frekvenciaképe látható. Ahúr választása lényegében önkényes, bármelyik másik húr jellegre hasonló id®-, vagy frek-venciatartománybeli képet mutat. Az E4 a húr inharmonicitását láthatjuk a 4.8. ábrán.
30
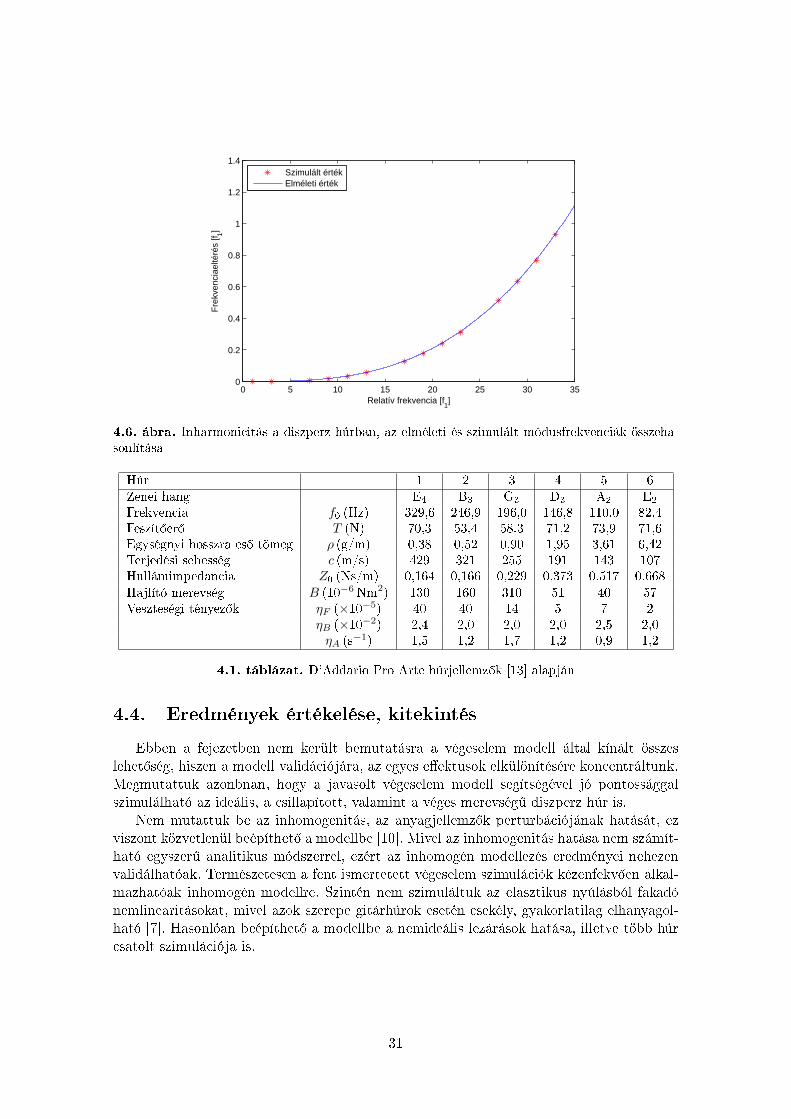
0 5 10 15 20 25 30 350
0.2
0.4
0.6
0.8
1
1.2
1.4
Relatív frekvencia [f1]
Fre
kven
ciae
ltéré
s [f 1]
Szimulált értékElméleti érték
4.6. ábra. Inharmonicitás a diszperz húrban, az elméleti és szimulált módusfrekvenciák összeha-sonlítása
Húr 1 2 3 4 5 6Zenei hang E4 B3 G3 D3 A2 E2
Frekvencia f0 (Hz) 329,6 246,9 196,0 146,8 110.0 82.4Feszít®er® T (N) 70,3 53,4 58,3 71,2 73,9 71,6Egységnyi hosszra es® tömeg ρ (g/m) 0,38 0,52 0,90 1,95 3,61 6,42Terjedési sebesség c (m/s) 429 321 255 191 143 107Hullámimpedancia Z0 (Ns/m) 0,164 0,166 0,229 0,373 0,517 0,668
Hajlító merevség B (10−6 Nm2) 130 160 310 51 40 57Veszteségi tényez®k ηF (×10−5) 40 40 14 5 7 2
ηB (×10−2) 2,4 2,0 2,0 2,0 2,5 2,0ηA (s−1) 1,5 1,2 1,7 1,2 0,9 1,2
4.1. táblázat. D'Addario Pro Arte húrjellemz®k [13] alapján
4.4. Eredmények értékelése, kitekintés
Ebben a fejezetben nem került bemutatásra a végeselem modell által kínált összeslehet®ség, hiszen a modell validációjára, az egyes eektusok elkülönítésére koncentráltunk.Megmutattuk azonbnan, hogy a javasolt végeselem modell segítségével jó pontossággalszimulálható az ideális, a csillapított, valamint a véges merevség¶ diszperz húr is.
Nem mutattuk be az inhomogenitás, az anyagjellemz®k perturbációjának hatását, ezviszont közvetlenül beépíthet® a modellbe [10]. Mivel az inhomogenitás hatása nem számít-ható egyszer¶ analitikus módszerrel, ezért az inhomogén modellezés eredményei nehezenvalidálhatóak. Természetesen a fent ismertetett végeselem szimulációk kézenfekv®en alkal-mazhatóak inhomogén modellre. Szintén nem szimuláltuk az elasztikus nyúlásból fakadónemlinearitásokat, mivel azok szerepe gitárhúrok esetén csekély, gyakorlatilag elhanyagol-ható [7]. Hasonlóan beépíthet® a modellbe a nemideális lezárások hatása, illetve több húrcsatolt szimulációja is.
31
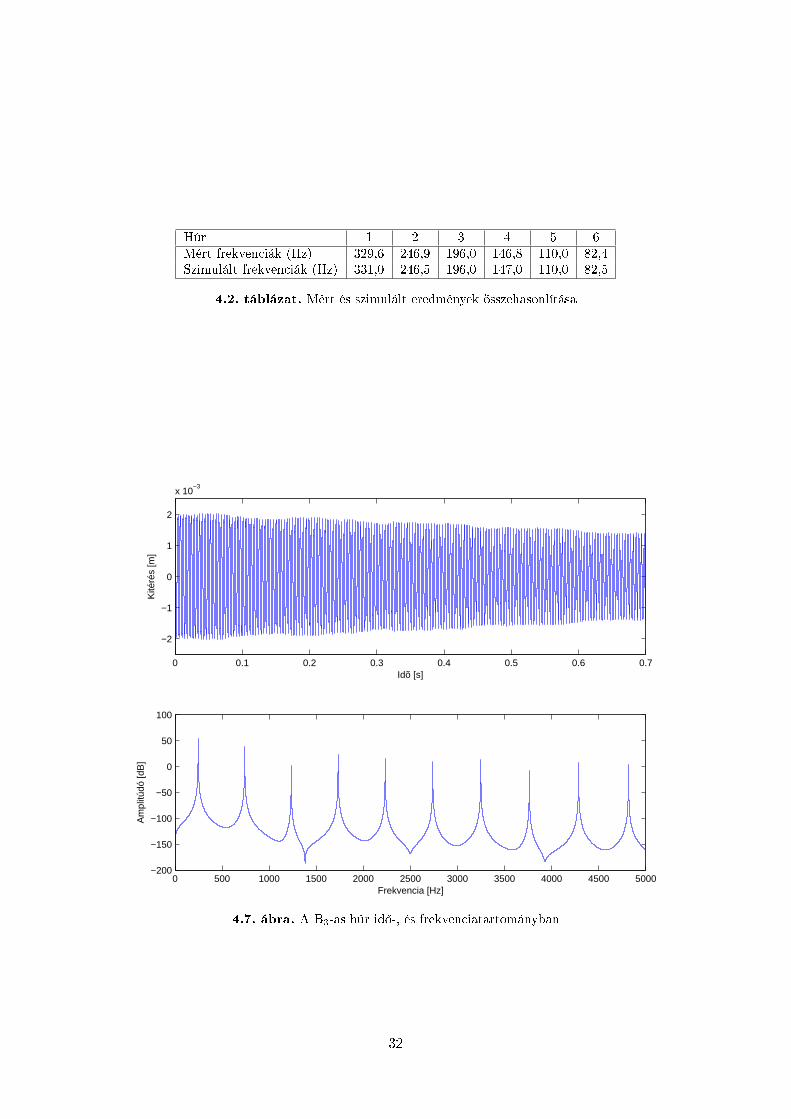
Húr 1 2 3 4 5 6Mért frekvenciák (Hz) 329,6 246,9 196,0 146,8 110,0 82,4Szimulált frekvenciák (Hz) 331,0 246,5 196,0 147,0 110,0 82,5
4.2. táblázat. Mért és szimulált eredmények összehasonlítása
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
−2
−1
0
1
2
x 10−3
Idõ [s]
Kité
rés
[m]
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000−200
−150
−100
−50
0
50
100
Frekvencia [Hz]
Am
plitú
dó [d
B]
4.7. ábra. A B3-as húr id®-, és frekvenciatartományban
32
0 1000 2000 3000 4000 5000 6000 7000 8000 90000
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Frekvencia [Hz]
Fre
kven
ciae
ltéré
s [f 1]
4.8. ábra. A E4-es húr inharmonicitása
33

34
5. fejezet
Összehasonlítás méréssel
Ahogy a bevezet®ben említésre került, fontos volt, hogy szimulált eredményeinket mértadatokkal is alátámasszuk. Az alábbi fejezetben bemutatjuk a mérés összeállítását, közöljükaz eredményeket, és egybevetjük számítógépes modellünk értékeivel. Továbbá egy olyanmérést is ismertetünk, mely a modell továbbfejlesztését segíti majd el®.
5.1. A gitár
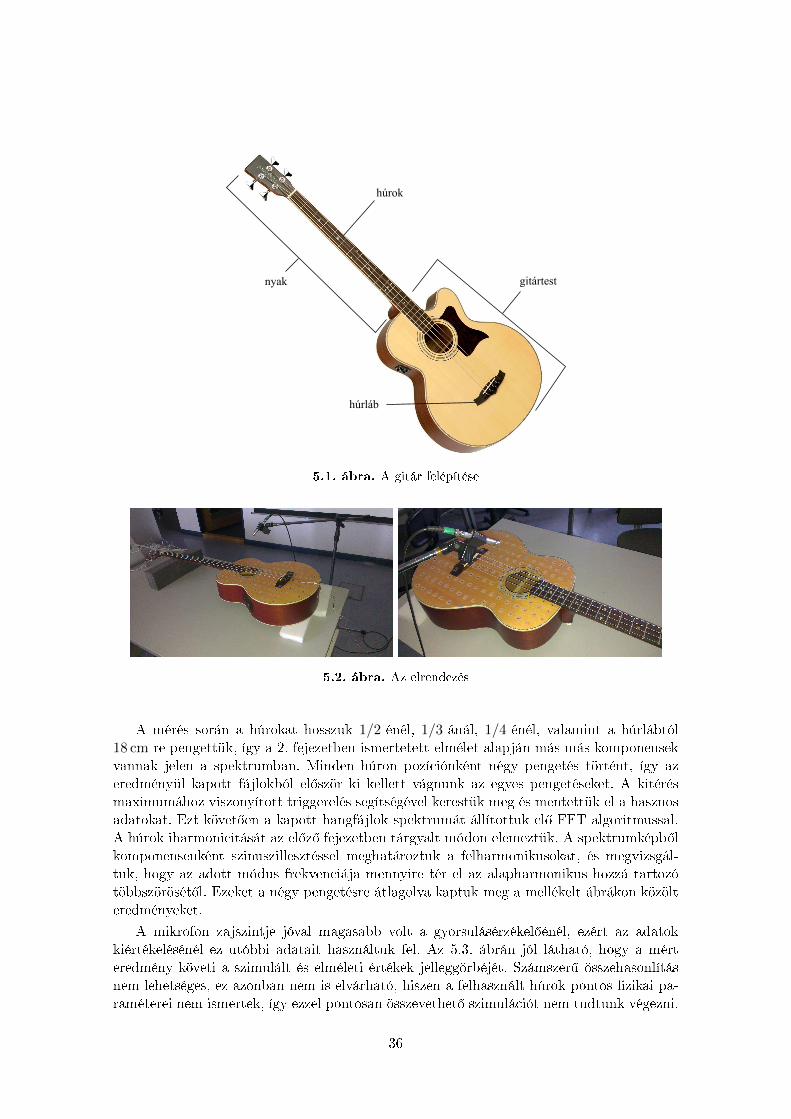
A mérést egy akusztikus basszusgitáron végeztük. Tekintettel arra, hogy a dolgozateddigi részében kizárólag a húrról volt szó, tekintsük át röviden a gitár legfontosabb tulaj-donságait.
A gitár egy akusztikai rezg®rendszer. Húrokból, a húrlábból, a gitártestb®l és a nyakbóláll. A megpengetett húr által kibocsátott hangteljesítmény igen kicsi, egyrészt azért, mertviszonylag kis leveg®réteget mozgat meg, másrészt pedig, mert az általa keltett nyomás-változások hamar kiegyenlít®dnek, mivel akusztikus dipólsugárzóként m¶ködik. Ezért egyrezonátorra van szükség (akusztikus gitár esetében ez a gitártest), amely nagyobb leve-g®tömeget hoz mozgásba, így növeli a hanger®t. A rezonátor legfontosabb feladata a húrmozgási energiájának hallható hanggá való alakítása [8].
A négyhúrú basszusgitárok általános hangolása a következ®: E1 (41,2 Hz), A1 (55,0 Hz),D2 (73,4 Hz), G2 (98,0 Hz). A húrok a nyakon és a húrlábon kapcsolódnak a hangszertesthez.Amennyiben a lezárások nemidealitásait kívánjuk behatóbban vizsgálni (pl. veszteségek),a húrláb mérése jó kiindulópont.
El®ször a gitárt a brit RotoSound cég Nickel Roundwound típusú, RBL 105 (E1),RBL 085 (A1), RBL 065 (D2), valamint RBL 045 (G2) jelzés¶ húrjaival szereltük fel, ésígy végeztünk méréseket az inharmonicitás vizsgálatára, majd a felhúrozatlan hangszertvizsgáltuk tovább, a húrláb, mint nemideális lezárás jellemzése céljából.
5.2. A húrok mérése
Els® mérésünk során a húrok pengetésével gerjesztett rezgések spektrumát igyekeztünkhatároztuk meg. Ehhez egy B&K 4188 1/2”-os kondenzátor mér®mikrofont és egy PCB353B13 (5 mV/m) gyorsulásérzékel®t használtunk. Ez utóbbit a húrláb alatt, a gitártestenhelyeztük el. A mérési összeállítás az 5.2. ábrán látható. A gitárt rugalmasan támasztottukalá, elkerülve a merev csatolásokat a mérési környezettel.
35
nyak
húrok
gitártest
húrláb
5.1. ábra. A gitár felépítése
5.2. ábra. Az elrendezés
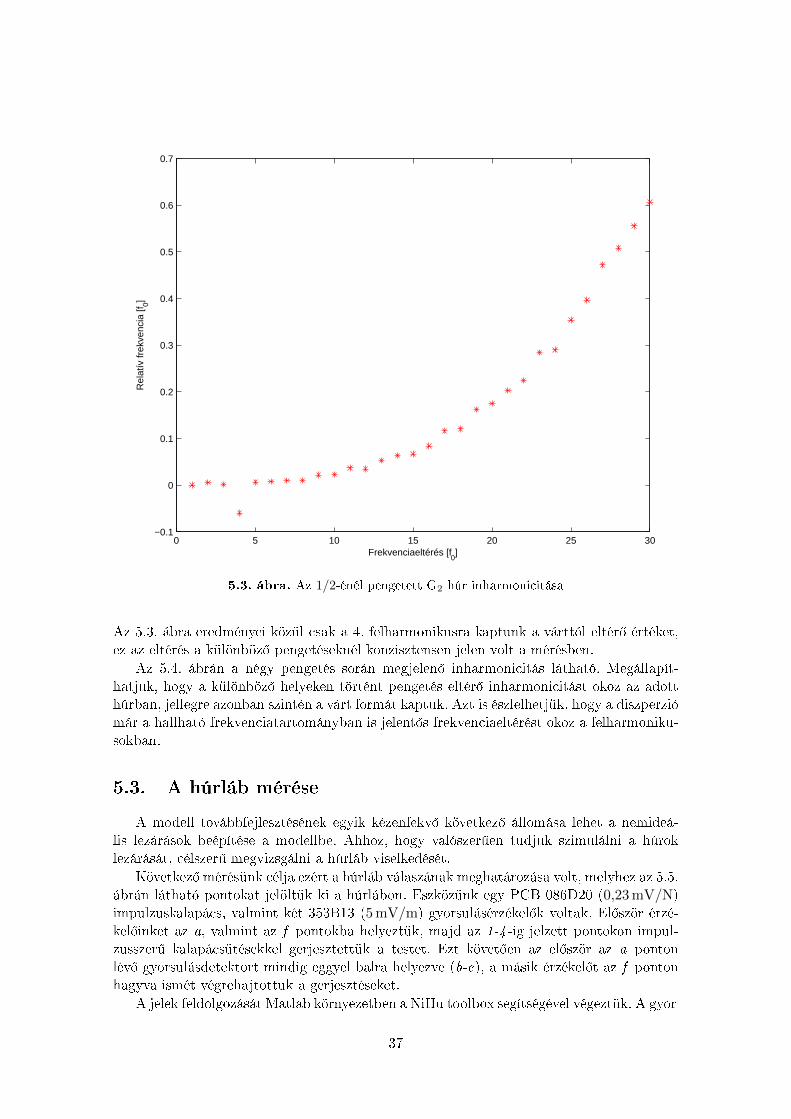
A mérés során a húrokat hosszuk 1/2-énél, 1/3-ánál, 1/4-énél, valamint a húrlábtól18 cm-re pengettük, így a 2. fejezetben ismertetett elmélet alapján más-más komponensekvannak jelen a spektrumban. Minden húron pozíciónként négy pengetés történt, így azeredményül kapott fájlokból el®ször ki kellett vágnunk az egyes pengetéseket. A kitérésmaximumához viszonyított triggerelés segítségével kerestük meg és mentettük el a hasznosadatokat. Ezt követ®en a kapott hangfájlok spektrumát állítottuk el® FFT algoritmussal.A húrok iharmonicitását az el®z® fejezetben tárgyalt módon elemeztük. A spektrumképb®lkomponensenként szinuszillesztéssel meghatároztuk a felharmonikusokat, és megvizsgál-tuk, hogy az adott módus frekvenciája mennyire tér el az alapharmonikus hozzá tartozótöbbszörösét®l. Ezeket a négy pengetésre átlagolva kaptuk meg a mellékelt ábrákon közölteredményeket.
A mikrofon zajszintje jóval magasabb volt a gyorsulásérzékel®énél, ezért az adatokkiértékelésénél ez utóbbi adatait használtuk fel. Az 5.3. ábrán jól látható, hogy a mérteredmény követi a szimulált és elméleti értékek jelleggörbéjét. Számszer¶ összehasonlításnem lehetséges, ez azonban nem is elvárható, hiszen a felhasznált húrok pontos zikai pa-raméterei nem ismertek, így ezzel pontosan összevethet® szimulációt nem tudtunk végezni.
36
0 5 10 15 20 25 30−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Frekvenciaeltérés [f0]
Rel
atív
frek
venc
ia [f
0]
5.3. ábra. Az 1/2-énél pengetett G2 húr inharmonicitása
Az 5.3. ábra eredményei közül csak a 4. felharmonikusra kaptunk a várttól eltér® értéket,ez az eltérés a különböz® pengetéseknél konzisztensen jelen volt a mérésben.
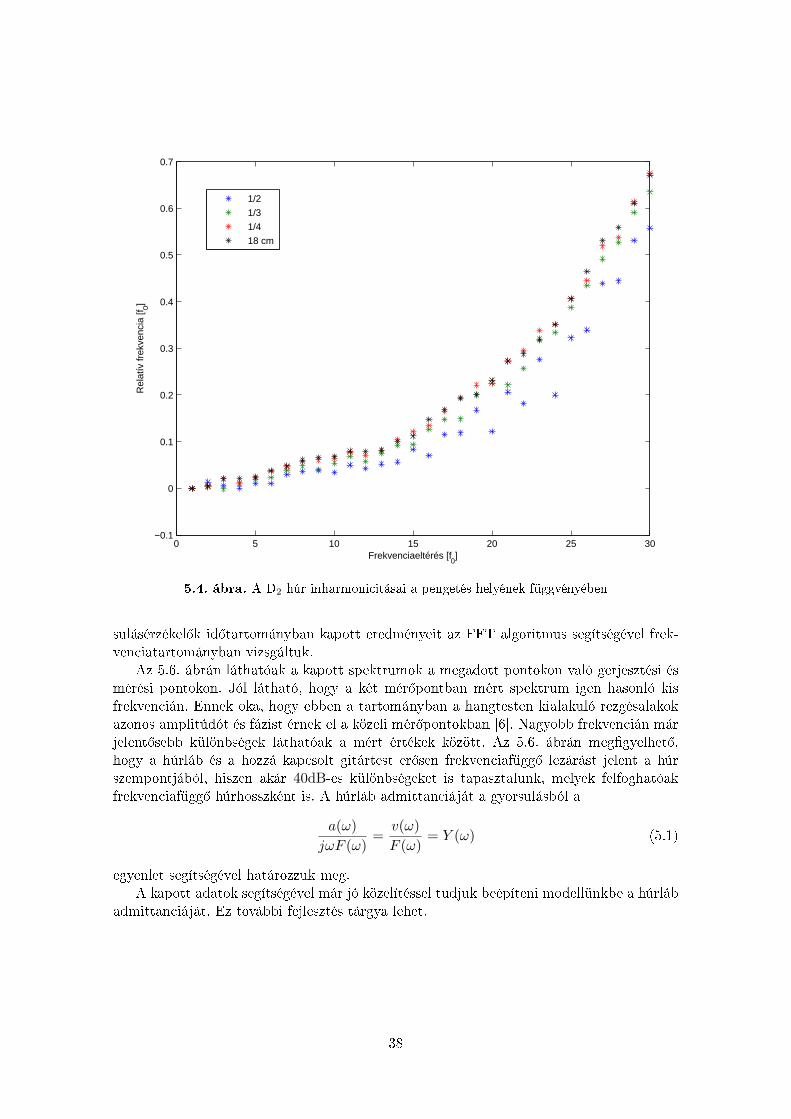
Az 5.4. ábrán a négy pengetés során megjelen® inharmonicitás látható. Megállapít-hatjuk, hogy a különböz® helyeken történt pengetés eltér® inharmonicitást okoz az adotthúrban, jellegre azonban szintén a várt formát kaptuk. Azt is észlelhetjük, hogy a diszperziómár a hallható frekvenciatartományban is jelent®s frekvenciaeltérést okoz a felharmoniku-sokban.
5.3. A húrláb mérése
A modell továbbfejlesztésének egyik kézenfekv® következ® állomása lehet a nemideá-lis lezárások beépítése a modellbe. Ahhoz, hogy valószer¶en tudjuk szimulálni a húroklezárását, célszer¶ megvizsgálni a húrláb viselkedését.
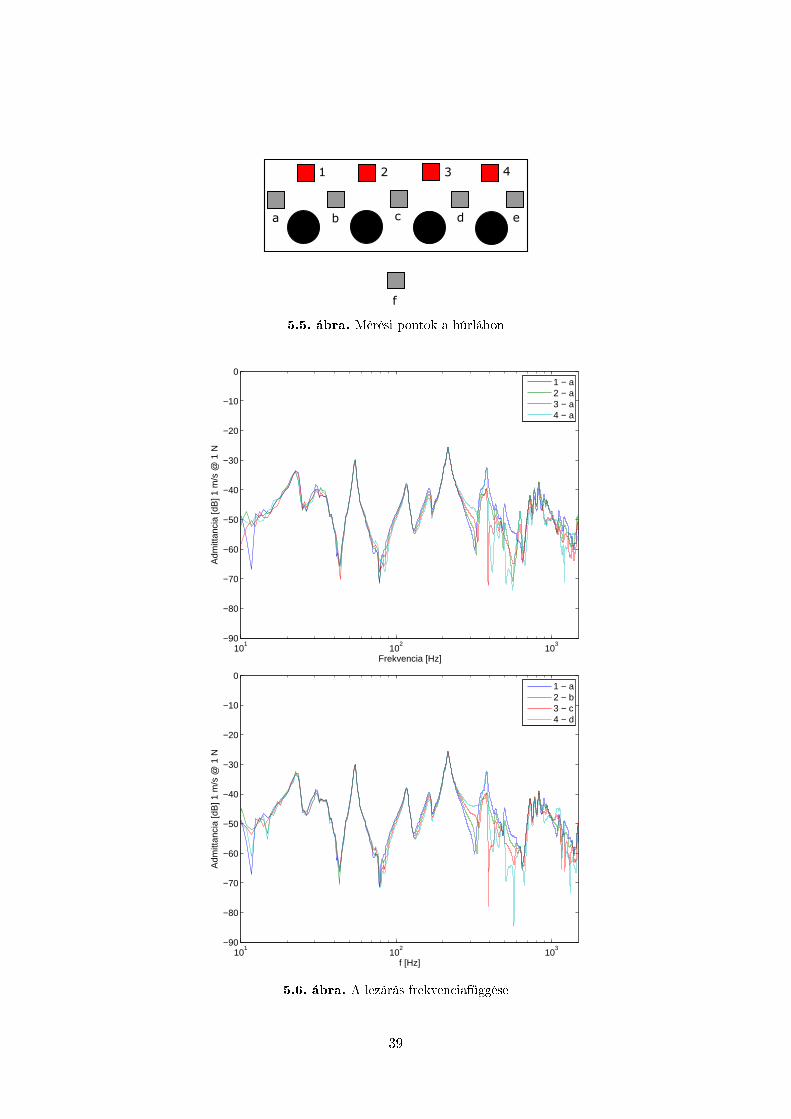
Következ® mérésünk célja ezért a húrláb válaszának meghatározása volt, melyhez az 5.5.ábrán látható pontokat jelöltük ki a húrlábon. Eszközünk egy PCB 086D20 (0,23 mV/N)impulzuskalapács, valmint két 353B13 (5 mV/m) gyorsulásérzékel®k voltak. El®ször érzé-kel®inket az a, valmint az f pontokba helyeztük, majd az 1-4 -ig jelzett pontokon impul-zusszer¶ kalapácsütésekkel gerjesztettük a testet. Ezt követ®en az el®ször az a pontonlév® gyorsulásdetektort mindig eggyel balra helyezve (b-e), a másik érzékel®t az f pontonhagyva ismét végrehajtottuk a gerjesztéseket.
A jelek feldolgozását Matlab környezetben a NiHu toolbox segítségével végeztük. A gyor-
37
0 5 10 15 20 25 30−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Frekvenciaeltérés [f0]
Rel
atív
frek
venc
ia [f
0]
1/2
1/3
1/4
18 cm
5.4. ábra. A D2 húr inharmonicitásai a pengetés helyének függvényében
sulásérzékel®k id®tartományban kapott eredményeit az FFT algoritmus segítségével frek-venciatartományban vizsgáltuk.
Az 5.6. ábrán láthatóak a kapott spektrumok a megadott pontokon való gerjesztési ésmérési pontokon. Jól látható, hogy a két mér®pontban mért spektrum igen hasonló kisfrekvencián. Ennek oka, hogy ebben a tartományban a hangtesten kialakuló rezgésalakokazonos amplitúdót és fázist érnek el a közeli mér®pontokban [6]. Nagyobb frekvencián márjelent®sebb különbségek láthatóak a mért értékek között. Az 5.6. ábrán meggyelhet®,hogy a húrláb és a hozzá kapcsolt gitártest er®sen frekvenciafügg® lezárást jelent a húrszempontjából, hiszen akár 40dB-es különbségeket is tapasztalunk, melyek felfoghatóakfrekvenciafügg® húrhosszként is. A húrláb admittanciáját a gyorsulásból a
a(ω)
jωF (ω)=v(ω)
F (ω)= Y (ω) (5.1)
egyenlet segítségével határozzuk meg.A kapott adatok segítségével már jó közelítéssel tudjuk beépíteni modellünkbe a húrláb
admittanciáját. Ez további fejlesztés tárgya lehet.
38
a b c d e
f
1 2 3 4
5.5. ábra. Mérési pontok a húrlábon
101
102
103
−90
−80
−70
−60
−50
−40
−30
−20
−10
0
Frekvencia [Hz]
Adm
ittan
cia
[dB
] 1 m
/s @
1 N
1 − a2 − a3 − a4 − a
101
102
103
−90
−80
−70
−60
−50
−40
−30
−20
−10
0
f [Hz]
Adm
ittan
cia
[dB
] 1 m
/s @
1 N
1 − a2 − b3 − c4 − d
5.6. ábra. A lezárás frekvenciafüggése
39

40

6. fejezet
Összegzés
A dolgozat célja a pengetett húr mozgásának olyan szimulációja, mely a diszperzió je-lenségét gyelembe véve kezeli a problémát. A modell zikai megfontolások alapján oldjameg a feladatot, a valós húrok minél jobb közelítésére törekszik. Ezért legel®ször a pen-getett húr jellemz®it vizsgáltuk, behatóan tanulmányozva mozgásának zikai leírását. Azanalitikus mozgásegyenlet meghatározása után a csillapítást okozó jelenségeket tekintet-tük át. Ezután körüljártuk a nemideális viselkedést okozó körülményeket, a rúd hajlítórezgéseit, majd felírtuk a veszteséges húregyenletet véges merevség¶, nemideális húrokra.
Választott szimulációs eljárásunk a végeselem módszer volt. A rövid, általános elméletiáttekintés után részletesen levezettük el®bb az ideális, majd a nemideális húrmodell összeál-lításának elméleti alapját. A húrt egymással csomópontjaikon kapcsolódó elemekre bontvaa számításokat erre a véges számú pontra végeztük el. Megismerkedtünk a Galjorkin-módszerrel, valamint a Newmark-sémával, melyek az tér- és id®beli diszkretizálásban ját-szottak fontos szerepet. Összeállítottuk a rendszerleíró mátrixokat, meghatároztuk a struk-túra befogási kényszereit. Haladva a zikai leírás sorrendjében, el®ször az ideális, csillapí-tott húr modelljét alkottuk meg. Ezt követ®en a szimulációt kiterjesztettük a nemideálishúrokra is, melyet új alakfüggvények használatával, és a rendszermátrixok fejlesztéséveloldottuk meg.
Ezután több szempontból vizsgáltuk a modelljeink pontosságát, a megismert zikaijellemz®khöz való hasonlóságát. Mind id®-, mind frekvenciatartományban elemeztük m¶-ködésüket. A szimulációt az analitikus modellel összehasonlítva azt tapasztaltuk, hogy amodell viselkedése minden tekintetben megfelelt el®zetes várakozásainknak. Az ideális mo-dell a numerikus módszerb®l adódó hibák ellenére jól közelítette az analitikus megoldást, avéges merevség¶ nemideális eredményeink valóságh¶en adták vissza az inharmonicitás jel-lemz®it, irodalomban publikált adatokkal összevetve is jó értékeket kaptunk. A szimulációeredményeinek bemutatásánál nem törekedtünk az összes hatás egyszerre történ® együttesgyelembevételére, viszont kitértünk azokra az egyszer¶ módosítási lehet®ségekre, melyek-kel a modell kiegészíthet®.
A szimulált értékeket mérési eredményekkel is összevetettük, melynek során bemutattuka diszperzió hatását valóságos húron. Sikerült megmérni és bemutatni az inharmonicitásmértékét a hangszer adott húrjain. Ezenkívül méréseket végeztünk a húrlábon is segítve amodell esetleges továbbfejlesztését.
A kés®bbi fejlesztések egyik lehetséges célja a nemideális lezárások beépítése a mo-dellbe, valamint annak elérése, hogy a rendszer ne csak a húr mozgását szimulálja, hanemképes legyen a zikai alapú hangszintézisre egy hangszertestmodellhez csatolva. Ez a fel-
41

adat egy bonyolultabb végeselem modell segítségével szintén megoldható. Összességébenelmondhatjuk, hogy a bemutatott modell minden szempontból megfelel az iránta támasz-tott elvárásoknak, illetve számos továbbfejlesztési lehet®séget rejt magában.
42
Köszönetnyilvánítás
Ezúton szeretném kifejezni hálámat mindazoknak, akik segítettek az egyetemi alapkép-zés során. Köszönettel tartozom egész családomnak, de mindenek el®tt szüleimnek, akikminden nehézségben támogattak szeretetükkel, és megteremtették egyetemi tanulmányaimvalamennyi feltételét. Hálás vagyok barátaimnak, akik miatt ezek az évek igazán felejthe-tetlenek maradnak számomra. Végül, de nem utolsó sorban szeretném megköszönni kon-zulensemnek, Rucz Péternek végtelen türelmét, odaadó segítségét, bátorítását, és mindazt,amire megtanított az elmúlt másfél év során.
43

44
Irodalomjegyzék
[1] Balázs Bank. Physics-based sound synthesis of the piano. Master's thesis, BudapestUniversity of Technology and Economics, 2000.
[2] Jean-Baptiste le Rond d'Alembert. Suite des recherches sur la courbe que forme unecorde tenduë, mise en vibration. pages 220249.
[3] J. G. de Jalón and E. Bayo. Kinematic and Dynamic simulation of multibody systems
The real-time challenge, chapter 7, pages 243270. Springer-Verlag, 1994.
[4] Péter Fiala. Bevezetés a végeselem módszer alkalmazásba, 2006. Segédlet.
[5] Péter Fiala. A hangszerek zikája. Elektronikus formában, 2009. Elöadásjegyzet.
[6] N. H. Fletcher and T. D. Rossing. The physics of musical instruments, chapter 2,pages 3364. Springer-Verlag, 1st edition, 1991.
[7] Colin Gough. The nonlinear free vibration of a damped elastic string. Journal of theAcoustical Society of America, 75:17701776, 1984.
[8] Emil Kovács. Hangszerész (pengetös) szakmai ismeret. Müszaki könyvkiadó, 2ndedition, 1994.
[9] S. Marburg and B. Nolte, editors. Computational Acoustics of Noise Propagation in
Fluids Finite and Boundary element methods, page 125. Springer, 2008.
[10] M. Marques, O. Inácio, V. Debut, and J. Antunes. On the dynamical behaviour ofworn guitar strings. In Proceedings of the 19th International Congress on Sound and
Vibration, pages 18. Paper ID: 317.
[11] Zsuzsanna Zsóa Rácz. Nemideális húrok csatolt rendszerekben, 2009. TDK dolgozat,Budapesti M¶szaki és Gazdaságtudományi Egyetem, Villamosmérnöki Kar.
[12] J. Woodhouse. On the synthesis of guiter plucks. Acta Acustica United with Acustica,90:928945, 2004.
[13] J. Woodhouse. Plucked guitar transients: Comparison of measurements and synthesis.Acta Acustica United with Acustica, 90:945965, 2004.
[14] O. C. Zienkiewicz, R. L. Taylor, and J. Z. Zhu. The Finite Element Method: Its basis
and fundamentals. Elsevier, 6th edition, 2004.
45

46
Forrásfájlok
Az alábbiakban közöljük a Matlab forrásfájlokat, melyeket a diszperz, csillapított húrvégeselem modelljének el®állításához és a szimuláció futtatásához fejlesztettünk. A Matlabsymbolic math toolboxának függvényeit használjuk a szimbolikus számításokhoz, más tool-boxok függvényeit nem használjuk. Az alábbi kódok csak a lényeges lépéseket tartalmazzák,az ábrák megrajzolását és az eredmények mentését / betöltését elvégz® kódsorokat itt nemtüntetjük fel. A megadott kódrészletek viszont teljesek, az itt megadott kód lefuttatásaelvezet az Eredmények c. fejezetben közölt futtatási eredményhez.
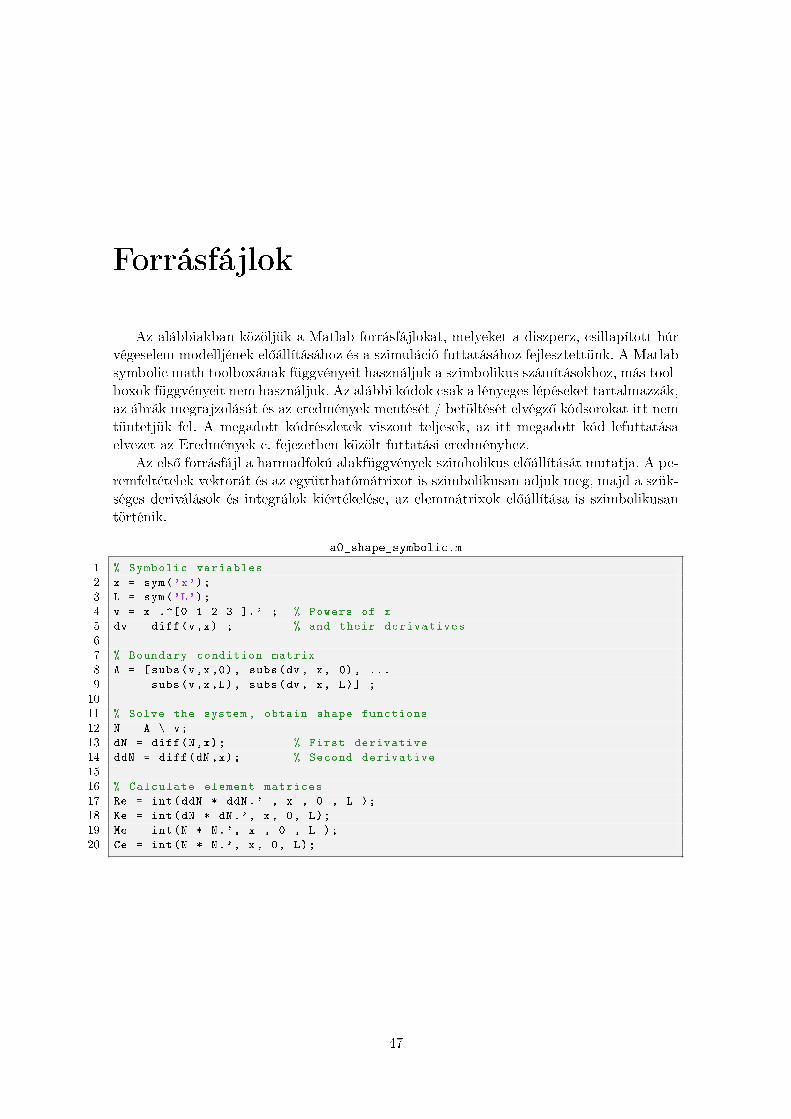
Az els® forrásfájl a harmadfokú alakfüggvények szimbolikus el®állítását mutatja. A pe-remfeltételek vektorát és az együtthatómátrixot is szimbolikusan adjuk meg, majd a szük-séges deriválások és integrálok kiértékelése, az elemmátrixok el®állítása is szimbolikusantörténik.
a0_shape_symbolic.m
1 % Symbolic variables
2 x = sym('x');
3 L = sym('L');
4 v = x .^[0 1 2 3 ].' ; % Powers of x
5 dv = diff(v,x) ; % and their derivatives
6
7 % Boundary condition matrix
8 A = [subs(v,x,0), subs(dv , x, 0), ...
9 subs(v,x,L), subs(dv, x, L)] ;
10
11 % Solve the system , obtain shape functions
12 N = A \ v;
13 dN = diff(N,x); % First derivative
14 ddN = diff(dN,x); % Second derivative
15
16 % Calculate element matrices
17 Re = int(ddN * ddN.' , x , 0 , L );
18 Ke = int(dN * dN.', x, 0, L);
19 Me = int(N * N.', x , 0 , L );
20 Ce = int(N * N.', x, 0, L);
47
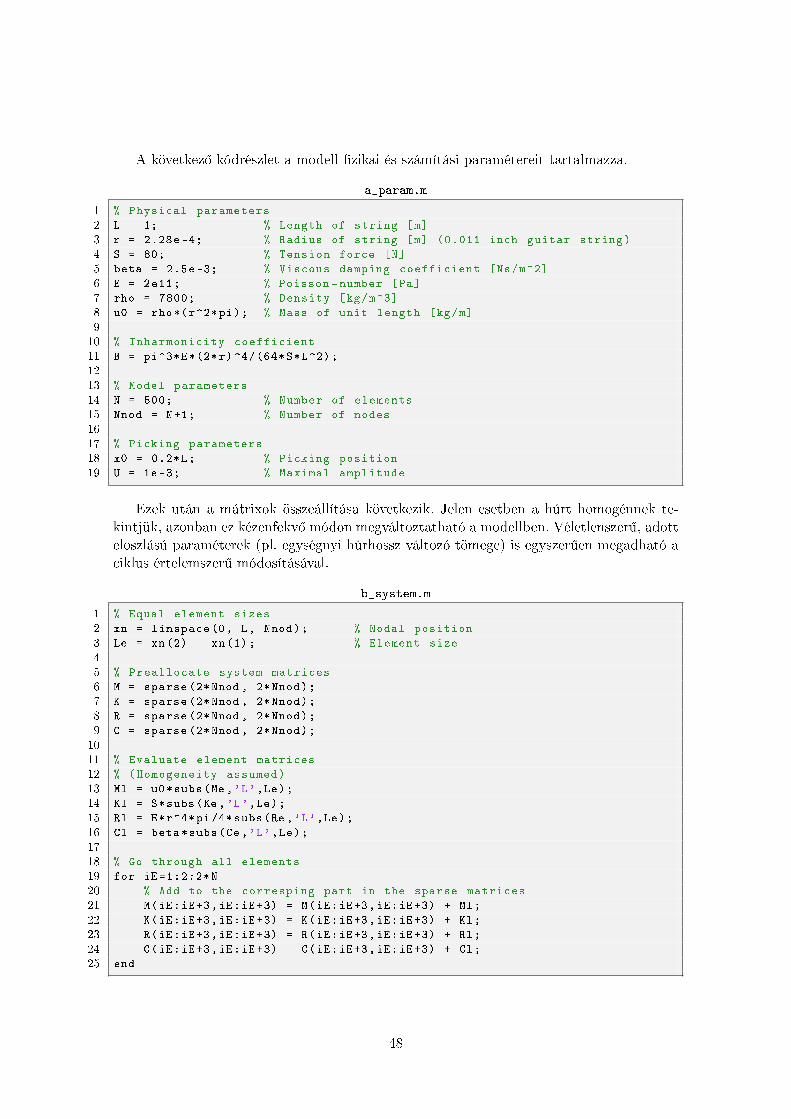
A következ® kódrészlet a modell zikai és számítási paramétereit tartalmazza.
a_param.m
1 % Physical parameters
2 L = 1; % Length of string [m]
3 r = 2.28e-4; % Radius of string [m] (0.011 inch guitar string)
4 S = 80; % Tension force [N]
5 beta = 2.5e-3; % Viscous damping coefficient [Ns/m^2]
6 E = 2e11; % Poisson -number [Pa]
7 rho = 7800; % Density [kg/m^3]
8 u0 = rho*(r^2*pi); % Mass of unit length [kg/m]
9
10 % Inharmonicity coefficient
11 B = pi^3*E*(2*r)^4/(64*S*L^2);
12
13 % Model parameters
14 N = 500; % Number of elements
15 Nnod = N+1; % Number of nodes
16
17 % Picking parameters
18 x0 = 0.2*L; % Picking position
19 U = 1e-3; % Maximal amplitude
Ezek után a mátrixok összeállítása következik. Jelen esetben a húrt homogénnek te-kintjük, azonban ez kézenfekv® módon megváltoztatható a modellben. Véletlenszer¶, adotteloszlású paraméterek (pl. egységnyi húrhossz változó tömege) is egyszer¶en megadható aciklus értelemszer¶ módosításával.
b_system.m
1 % Equal element sizes
2 xn = linspace(0, L, Nnod); % Nodal position
3 Le = xn(2) - xn(1); % Element size
4
5 % Preallocate system matrices
6 M = sparse (2*Nnod , 2*Nnod);
7 K = sparse (2*Nnod , 2*Nnod);
8 R = sparse (2*Nnod , 2*Nnod);
9 C = sparse (2*Nnod , 2*Nnod);
10
11 % Evaluate element matrices
12 % (Homogeneity assumed)
13 Ml = u0*subs(Me ,'L',Le);
14 Kl = S*subs(Ke ,'L',Le);
15 Rl = E*r^4*pi/4* subs(Re,'L',Le);
16 Cl = beta*subs(Ce,'L',Le);
17
18 % Go through all elements
19 for iE =1:2:2*N
20 % Add to the corresping part in the sparse matrices
21 M(iE:iE+3,iE:iE+3) = M(iE:iE+3,iE:iE+3) + Ml;
22 K(iE:iE+3,iE:iE+3) = K(iE:iE+3,iE:iE+3) + Kl;
23 R(iE:iE+3,iE:iE+3) = R(iE:iE+3,iE:iE+3) + Rl;
24 C(iE:iE+3,iE:iE+3) = C(iE:iE+3,iE:iE+3) + Cl;
25 end
48
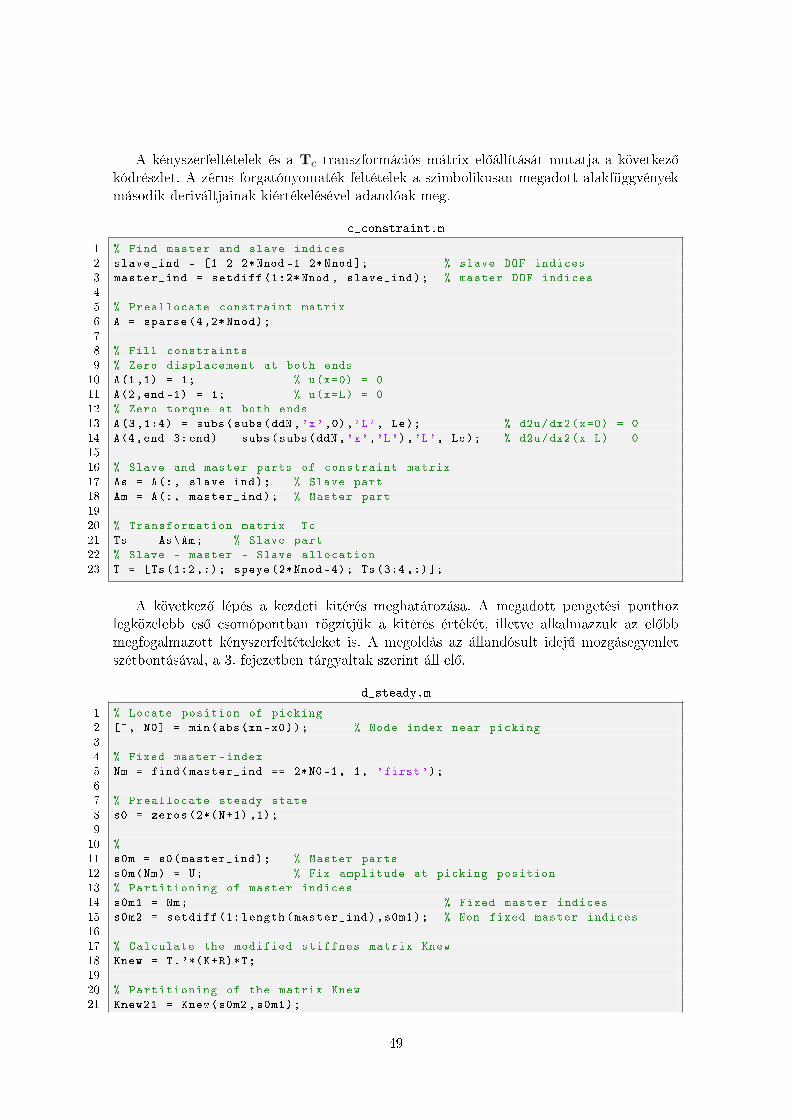
A kényszerfeltételek és a Tc transzformációs mátrix el®állítását mutatja a következ®kódrészlet. A zérus forgatónyomaték feltételek a szimbolikusan megadott alakfüggvényekmásodik deriváltjainak kiértékelésével adandóak meg.
c_constraint.m
1 % Find master and slave indices
2 slave_ind = [1 2 2*Nnod -1 2*Nnod]; % slave DOF indices
3 master_ind = setdiff (1:2*Nnod , slave_ind); % master DOF indices
4
5 % Preallocate constraint matrix
6 A = sparse (4,2* Nnod);
7
8 % Fill constraints
9 % Zero displacement at both ends
10 A(1,1) = 1; % u(x=0) = 0
11 A(2,end -1) = 1; % u(x=L) = 0
12 % Zero torque at both ends
13 A(3 ,1:4) = subs(subs(ddN ,'x' ,0),'L', Le); % d2u/dx2(x=0) = 0
14 A(4,end -3: end) = subs(subs(ddN ,'x','L'),'L', Le); % d2u/dx2(x=L) = 0
15
16 % Slave and master parts of constraint matrix
17 As = A(:, slave_ind); % Slave part
18 Am = A(:, master_ind); % Master part
19
20 % Transformation matrix Tc
21 Ts = -As\Am; % Slave part
22 % Slave - master - Slave allocation
23 T = [Ts(1:2 ,:); speye (2*Nnod -4); Ts(3:4 ,:)];
A következ® lépés a kezdeti kitérés meghatározása. A megadott pengetési ponthozlegközelebb es® csomópontban rögzítjük a kitérés értékét, illetve alkalmazzuk az el®bbmegfogalmazott kényszerfeltételeket is. A megoldás az állandósult idej¶ mozgásegyenletszétbontásával, a 3. fejezetben tárgyaltak szerint áll el®.
d_steady.m
1 % Locate position of picking
2 [~, N0] = min(abs(xn-x0)); % Node index near picking
3
4 % Fixed master -index
5 Nm = find(master_ind == 2*N0 -1, 1, 'first');
6
7 % Preallocate steady state
8 s0 = zeros (2*(N+1) ,1);
9
10 %
11 s0m = s0(master_ind); % Master parts
12 s0m(Nm) = U; % Fix amplitude at picking position
13 % Partitioning of master indices
14 s0m1 = Nm; % Fixed master indices
15 s0m2 = setdiff (1: length(master_ind),s0m1); % Non -fixed master indices
16
17 % Calculate the modified stiffnes matrix Knew
18 Knew = T.'*(K+R)*T;
19
20 % Partitioning of the matrix Knew
21 Knew21 = Knew(s0m2 ,s0m1);
49
22 Knew22 = Knew(s0m2 ,s0m2);
23
24 % Solve system of equations
25 s0m(s0m2) = - Knew22 \ (Knew21 * s0m(s0m1));
26
27 % Calculate slave values as well
28 s0 = T*s0m;
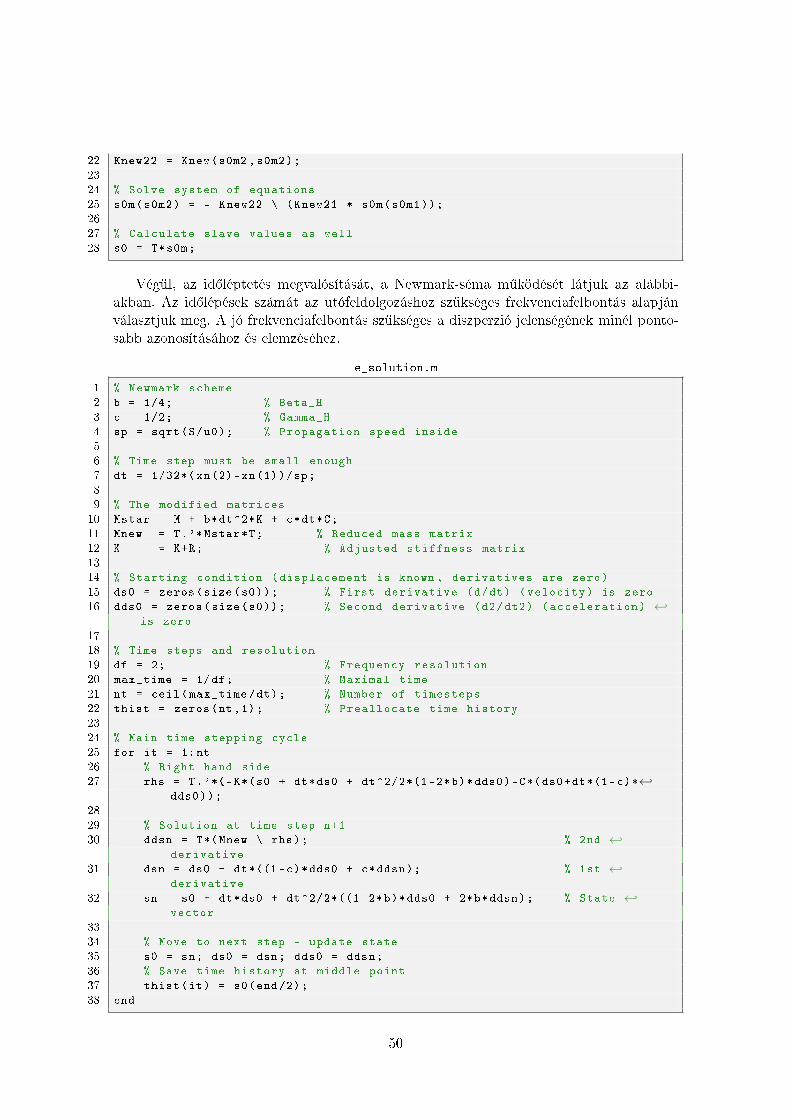
Végül, az id®léptetés megvalósítását, a Newmark-séma m¶ködését látjuk az alábbi-akban. Az id®lépések számát az utófeldolgozáshoz szükséges frekvenciafelbontás alapjánválasztjuk meg. A jó frekvenciafelbontás szükséges a diszperzió jelenségének minél ponto-sabb azonosításához és elemzéséhez.
e_solution.m
1 % Newmark scheme
2 b = 1/4; % Beta_H
3 c = 1/2; % Gamma_H
4 sp = sqrt(S/u0); % Propagation speed inside
5
6 % Time step must be small enough
7 dt = 1/32*( xn(2)-xn(1))/sp;
8
9 % The modified matrices
10 Mstar = M + b*dt^2*K + c*dt*C;
11 Mnew = T.'*Mstar*T; % Reduced mass matrix
12 K = K+R; % Adjusted stiffness matrix
13
14 % Starting condition (displacement is known , derivatives are zero)
15 ds0 = zeros(size(s0)); % First derivative (d/dt) (velocity) is zero
16 dds0 = zeros(size(s0)); % Second derivative (d2/dt2) (acceleration) ←is zero
17
18 % Time steps and resolution
19 df = 2; % Frequency resolution
20 max_time = 1/df; % Maximal time
21 nt = ceil(max_time/dt); % Number of timesteps
22 thist = zeros(nt ,1); % Preallocate time history
23
24 % Main time stepping cycle
25 for it = 1:nt
26 % Right hand side
27 rhs = T.'*(-K*(s0 + dt*ds0 + dt ^2/2*(1 -2*b)*dds0)-C*(ds0+dt*(1-c)*←dds0));
28
29 % Solution at time step n+1
30 ddsn = T*(Mnew \ rhs); % 2nd ←derivative
31 dsn = ds0 + dt*((1-c)*dds0 + c*ddsn); % 1st ←derivative
32 sn = s0 + dt*ds0 + dt ^2/2*((1 -2*b)*dds0 + 2*b*ddsn); % State ←vector
33
34 % Move to next step - update state
35 s0 = sn; ds0 = dsn; dds0 = ddsn;
36 % Save time history at middle point
37 thist(it) = s0(end/2);
38 end
50

![dr. Kovács Ádám, dr. Szekrényes András, Moharos István, dr. Oldal István - Végeselem-módszer [2011]](https://img.pdfslide.tips/doc/110x75/55cf9ba1550346d033a6c7d4/dr-kovacs-adam-dr-szekrenyes-andras-moharos-istvan-dr-oldal-istvan.jpg)


















![TUDOMÁNYOS DIÁKKÖRI DOLGOZAT · A végeselem-módszer kialakulása [1] A mérnöki gyakorlatban jelentkező szerkezetek nagy része rugalmas anyagból készül, s a terhelés bizonyos](https://img.pdfslide.tips/doc/110x75/5e484fc81e9333353d794b24/tudomnyos-dikkri-a-vgeselem-mdszer-kialakulsa-1-a-mrnki-gyakorlatban.jpg)








