-
9789639819443
I E n r
DS ~/l~ / L .,. zal)O atna.s
-
8.2. Gyenge megfogalmazs
................................................................................
65 8.3. Vgeselem mtrixok, a tehervektor s a mozgsegyenlet
........................... 65 8.4. llandsult harmonikus
gerjesztett rezgs
................................................... 67 8.5.
Szabadrezgsek, sajtrezgsek
.....................................................................
69
9. H FESZLTSGEKSZMTSA
........................................................ 72 9 .l.
Hmrsklet hatsnak vizsglata l D-s feladatnL
.................................... 72 9.2. Hmrsklet hatsnak
vizsglata SF feladatoknl .................................. 74
10. AZ I-DEAS PROGRAMRENDSZER HASZNLATA
............................ 76 10.1. A szoftver elindtsa
............................... ,
..................................................... 76 10.2.
Gyakran alkalmazott eszkzk funkcik
..................................................... 77 10.3. j
rajz ksztse
............................................................................................
78 10.4. Vgeselemes modellezs, SIMULATION MODUL
................................... 82 10.5. A sg (Help) rendszer
.................................................................................
85
ll. I-DEAS MINTAFELADATOK
.................................................................
87
ll. l. Skbeli rcsos szerkezet
................................................................................
87 11.2. Skalakvltozsi feladat
................................................................................
94 11.3. Forgattys tengely torzis sajtrezgsei
..................................................... l 00
12. Irodalomjegyzk
........................................................................................
106
6
1. BEVEZETS A vgeselem mdszer a mmki tevkenysg legismertebb s
legszlesebb krben alkalma-
zott kzelt numerikus szmtgpes eljrsa. A mdszer az elmlt 50-60
vben a szmt-gpek fejldsvel egytt vlt hatkony segdeszkzv a mmki
szerkezettervezsnek s a mmki szerkezetekben lezajl folyamatok
analzisnek A szmtgpes mmki tervez rendszerek szinte mindegyike
tartalmaz vgeselem mdszeren alapul analzis modulokat, amelyek a
szilrdsgtani, dinamikai, ramlstani, htani, elektromgneses, stb.
feladatoknak a mmki szempontoknak megfelel pontossg megoldst teszik
lehetv. Ezen kvl a szoftver piacon rendelkezsre llnak specilis
vgeselem programrendszerek is, amelyek mr-nki s termszettudomnyos
kutatsi ignyek kielgtsre is alkalmasak.
A fenti programrendszerek hatkony felhasznlshoz szksg van
azonban a mdszer elvi alapjainak, valamint specilis numerikus
technikinak ismeretre is. Ezek ismeretnek hinya modellezsi
tvedsekhez vezethet, valamint gtolhatja az analzis eredmnyeinek
megrtst.
A jegyzet a Szchenyi Istvn Egyetem Alkalmazott Mechanika
Tanszknek a mmki me-chanika BSc szint tantrgyaiban oktatott
ismeretanyagra tmaszkodva az egyszer hzott-nyomott rd szilrdsgtani,
dinamikai s hfeszltsgi feladatainak rszletes trgyalsval vezeti be a
vgeselem mdszer alapfogalmait Ezen tlmenen rviden trgyalja a
mechanika skbeli feladatai vizsglatra alkalmas izoparametrikus
vgeselemeket is. A jegyzet felttelezi a mmki egyetemi alapkpzs
Statika, Szilrdsgtan, Mozgstan s Rezgstan tantrgyaiban tanult
mechanikai valamint a B Sc szint matematikai alapok ismerett
is.
A jegyzet elssorban a Szchenyi Istvn Egyetem BSc mmkkpzsben
szerepl heti ngy rs Vgeselem mdszer cm tantrgy hallgati szmra kvn
segtsget nyjtani a mdszer alapjainak elsajttshoz.
A gyakorlati anyag elsajttst a Szchenyi Istvn Egyetem
Alkalmazott Mechanika Tan-szknek honlapjn (http:/www.sze.hu/am/)
tallhat oktatsi segdletek is segtik, amelyek a jegyzet tmakreihez
is kapcsold kidolgozott gyakorl feladatokat tartalmaznak. A
szm-tgpes gyakorlatok az I-DEAS gpszeti tervez rendszer vgeselem
moduljainak felhaszn-lsval kszltek.
A vgeselem mdszer alapjainak elsajttshoz a jegyzet szerzje
eredmnyes munkt k-vn. A szerz ezen a helyen mond ksznetet Dr. Pere
Balzs egyetemi docensnek, a jegyzet lektornak hasznos s rdemi
szakmai szrevteleirt, amelyek a jegyzet vgleges vltozatba
bepltek.
Gyr, 2009. janur
7
-
SSZEFOGLAL 2.1. Mtrixalgebrai sszefoglal
a) Mtrix rtelmezse, jellse: Mtrix: Skalris mennyisgeknek,
szmoknak megadott szablyszerint tblzatba rendezett
halmaza.
Mtrixjellse: [4J=[a11 a12 a13 ],vagy [4] [au], (i=1,2, ...
,n),(J=l,2, ... ,m). az1 azz a23
A mtrixakat ktszer alhzott betvel, a mtrixok elemeit
(koordintit) als indexes betvel jelljk. Pl. ;t!,~ s a13 , a2 stb.
Az a13 mtrixelem az A mtrix els sorban s harmadik oszlopban ll.
Mtrix mrete: Pldul a fenti (2 x 3 )-as, vagy (n x m )-es mret [d]
mtrixnak kt, vagy
n sora s hrom, vagy m oszlopa van. Az a13 mtrix elemjells
kiejtse (kiolvassa): egy hrom.
Oszlopmtrix: [~J =r :J sormtrix: [l J = [" a2 a,]. Az
oszlopmtrixnak egy oszlopa, a sonntrixnak egy sora van. A sormtrix
ugyanannak az oszlopmtrixnak a transzponlja (lsd b. pont). A
sormtrixot a mtrix betjelnek fels indexbe rt Tbetjelli.
b) Mtrixmveletek: A mveleteket (2 x 2) -es, (2 x l) es s (l x 2)
-es mtrixokra mutatjuk be.
- Mtrix transzponltja (tkrzs a ftlra): A mtrix ftljt az azonos
index elemek alkotjk.
A transzponlsi mvelet jele: T (a mtrix fels indexben). A
transzponls oszlopmtrixbl sormtrixot, sormtrixbl pedig
oszlopmtrixot hoz lt-re.
Az ;t!r jells kiejtse (kiolvassa): transzponlt.
- Mtrixok sszeadsa, kivonsa: Csak azonos mret mtrixok adhatk
ssze, vonhatk ki egymsbl. A {2,
8
[a11 a12 ][b11 h12 ]=[(au b11) (al2:blz)]=[cu c12l az1 azz bz1
bzz (azlbzi) (azz-bzz) cz1 Czz '-----v----' '----..r----'
'----.
.r----'
(2 x 2) (2 x 2) (2 x 2) (2 x 2) - Mtrix szorzs (sor-oszlop
kombinci):
Csak olyan mtrixok szorozhatk ssze, amelyek teljestik azt a
felttelt, hogy az els szorztnyez oszlopainak szma megegyezik a
msodik szorztnyez sorainak szm-vaL
4~=~,
[a11 a12 ][b11 h12 ]=[(all hu +a1z bzl) C~1 b12+~2 bzz)] az1 azz
bzl bzz (az! hu+azz bzl) Ca21 b12+a22 bzz) '-----v----'
'----..r----' (2 x 2) (2 x 2) (2 x 2) 4g=g,
[ a1 azJ[bll biz] ~ b21 b22 (l x 2) '----..r----' (2 x 2) c)
Klnleges mtrixok:
- Egysgmtrix: E= [1 0]. Tulajdonsga: li. A= A Ji= A.
= o l -- ---
Az egysgmtrixa ftljban l-es koordintkat, a ftljn kvl O elem~k~t
tartalmaz. Az egysgmtrixszal trtn szorzs nem vltoztatja meg a
megszorzott matnxot.
- Szimmetrikus mtrix: 4 r= 4 A mtrix elemei megegyeznek a ftlra
vett tkrkpkkeL
[ J [l 2 J , 'ku r Pldul ;t! = 2 9 sz1mmetn s matnx. - F
erdeszimmetrikus mtrix: 4 T = -A .
A mtrix brmelyik eleme megegyezik a ftlra vett tkrkpnek mnusz
egyszeres vel. Ebbl az kvetkezik, hogy a ftlban csak zrus elemek
lehetnek.
[ J [O - 3] . 'ku r Pldul ;t! = 3 0 ferdesz1mmetn s matnx. d)
Mtrix adjungltia, determinnsa, inverze:
-Adjunglt mtrix: a mtrix elemeihez tartoz eljeles
aldeterminnsokbl kpezett mtrix Jellse: adj aii Aii .
9
-
- Mtrix determinnsa: a mtrix elemeibl megadott "kifejtsi" szably
szerint ellltott skalr szm.
. i a11 a12 a13
detlaiil = detldl = a2, a22 a23 =a" AII + ai2 AI2 + ai3 An= a3I
a32 a33
a" 1::: :::l+ a12 { -1::: :::l}+ a" l::: :::l = =ai I (a22a33 -
a23a32)- a12 (a2,a33 ai3a3,) +ai 3 (a2Ia32 - a22a3I)
-Inverz mtrix (reciprok mtrix): A. A-I = A-I . A =E . === == ==
=
Az d-' mtrix az d mtrix inverze, vagy reciproka. Csak ngyzetes
mtrixnak ltezik inverze (reciproka) abban az esetben, ha az A mtrix
elemeibl kpezett determinns nem nulla.
. , . . , , , _1 adj A Az znverz matrzx kzszamztasa: A =---=- .
detl;il
2.2. Mtrix sajtrtkei s sajtvektorai -A sajtrtk feladat
kitzse:
Ltezik-e olyan !!;, oszlopmtrix, amellyel az ;i ngyzetes mtrixot
megszorozva, az !!. oszlopmtrix valahnyszorast kapjuk: -
;i?:;=A!:;, ahol a A skalris mennyisg? Ha ltezik ilyen !:;
oszlopmtrix, akkor ezt az d ngyzetes mtrix sajtvektornak, a ;t
skalris mennyisget pedig az ;i mtrix sajtrtknek nevezzk.
-A sajtrtkfeladat megoldsa: A sajtrtk feladat megoldst egy
(2x2)-es mtrixon mutatjuk be. Az elz egyenletet rszletesen kirva s
bal oldalra rendezve:
[ :~: :~',][::]=2[ :J ~ [ :~: =~'J::]-2[ ::]=[~l elvgezve a
szorzsokat, az nx, nY ismeretlenre homogn lineris algebrai
egyenletrend-szert kapunk:
(a11 - A)nx + a12 nY= O, a21 nx +(ali- .:t)ny =0.
Az ~gyen~etr~n~sze,r n~mtrivilis (nu~ltl klnbz) megoldsnak
felttele az, hogy az egyutthato matnxbol kepezett determmnsnak el
kell tnnie:
l(aii- A) ai2 l O.
a2I (a, I- ;t)
10
A determinnst kifejtve kapjuk a karakterisztikus egyenletet: ;t2
-(ali +a22)A+(a,Ia22 -ai2a2I) O .
A karakterisztikus egyenlet megoldsai a mtrix sajtrtkei: (ai,+
a2J ~(ali+ a22)2 + 4a,2a2I
2 A homogn lineris algebrai egyenletrendszemek csak A = .:t, s A
= A2 esetn van
nemtrivilis megoldsa. A mtrix sajtrtkeit nvekv sorrendben szoks
sorszmozni. Ha az egyes Ai (i=l,2) sajtrtkeket behelyettestjk a
homogn lineris algebrai egyen-letrendszerbe, akkor az
egyenletrendszer megoldhat az nix, niy ismeretlenre:
(a, l- Ai)nix + al2 niy =0} nix = => ahol i=l,2.
a2, nix +(ali- .:tJniy =O niy = Az ;ti (i=l,2) sajtrtkek
behelyettestse esetn azonban az egyenletrendszer egyenletei egymstl
nem linerisan fggetlenek, ezrt az egyik egyenletet el kell hagyni s
a msik
egyenletbl csak az nix l niy , vagy niy l nix (i= l ,2) hnyados
hatrozhat meg. Az nix s niy rtkt akkor kapjuk meg egyrtelmen, ha az
!:;~ = [ nix niy J sajtvektorok-tl megkveteljk, hogy egysgvektorok
legyenek:
~n~+ n~ =l, i=l,2. 2.3. Vektorok skalris szorzata
A skalris szorzs rtelmezse: a b= lalibicos a. (a a vektorok ltal
bezrt szg, O~ a~ n-.) Az a b mvelet kiolvassa: skalrisan szorozva
bvel, vagy skalr b. A skalris szorzs kiszmtsa mtrixszorzssal:
[bxl ii b = [a, a, a, J ~ = a A + ai, + a,b, . Az els szorz
tnyez koordintit sormtrixba, a msodik szorz tnyez koordintit
osz-lopmtrixba rendezzk s a szorzst a mtrixszorzs szablyai szerint
(sor-oszlop kombinci) vgezzk el. A szorzs eredmnye egy skalris
mennyisg.
2.4. Matematikai gyakorl feladatok 2. 4.1. feladat: Mtrix
mveletek Adott: A =[2 -4] B =[-12 4].
7 3 ' = -6 3
11
-
Feladat: a) Az AT s flT transzponlt mtrixok meghatrozsa. b) Az
;i+ fl sszegmtrix s az ;i- fl klnbsgmtrix meghatrozsa. c) Az
szorzatmtrix meghatrozsa. Kidolgozs: a) Az ;iT s flT transzponlt
mtrixok meghatrozsa:
T [2 7] 4 -4 3 ' [ -12 BT = 4 b) Az ;i+ fl sszegmtrix s az ;i
-fl klnbsgmtrix meghatrozsa:
;i+~=[~ -:]+[=~2 ~]=[-;o ~l A-B=[2 4]-[-12 4]=[14 -8] = = 7 3 -6
3 13 o
c) Az ;i !l szorzatmtrix meghatrozsa. AB= [2 -4][-12 4]= [2(
-12) + (-4)( -6) 2 4+ ( -4)3] = [-48 -4]. == 7 3 -6 3 7(-12)+3(-6)
7 4+33 -102 37
2 .4. 2. feladat: Skalris s mtrix szorzs Adott: a= (4 T+ 6]- f)
m, Feladat:
jj = (-3 T+ J_ f) m Az a b skalris szorzat meg-hatrozsa.
Mrtkegysg: m- mter. Kidolgozs: Az a b szorzat meghatrozsa:
b=[4 6 It] 4(-3)+61+(-1)(-1)=-5m2 ,
2.4.3. feladat: Mtrix inverznek ellltsa
Adott: f! = r ~ ~ ~l -2 2 l
Fel adat: Az f! mtrix inverznek meghatrozsa. Kidolgozs: - A
mtrix determinnsa:
detlf!l 2(-3-2)-1(-3+2)+2(6+6) 15.
12
-Az adjunglt mtrix elemei: adja11 =-3 2=-5, adja12 -(-3+2)=1,
adja13 =6+6=12, adja21 =-(-1+4)=5, adja22 =-2+4=2, adja23
-(4+2)=-6, adja31 =1-6 -5, adja32 =-(2-6)=4, adja33 =6-3=3.
-Az adjunglt mtrix: adj!};= r-~ ~ ~~l . -5 4 3
r-5 5 -5l d" A
- Az inverz (reciprok) mtrix: f!- 1 = a Jl=l = / 5 l 2 4 det fl
12-6 3 - Ellenrzs:
44-l =l ~ ~ ~l l~l-: ~-~J= l~ ll~ ~5 1~5l =g. -2 2 -l 12-6 3 o
o
2.4.4. feladat: Mtrix sajtrtkeinek s sajtvektorainak
meghatrozsa
l-30 o ol
Adott: f!= O 30 -40 . o -40 90
Feladat: Az f! mtrix sajtrtkeinek s sajtvektorainak a
meghatrozsa. Kidolgozs: - A megoldand homogn lineris algebrai
egyenletrendszer:
l
(-30o-A) (30~A) -~O ][::]=l~], vagy (30-;~:~-:~::=~J
O -40 (90- A) n z O -40 ny +(90- A )n z = O
- A karakterisztikus egyenlet: (-30-A) O O
O (30-A) -40 =0, => (-30-A)[(30 A)(90-A)-4040]=0, O -40
(90-A)
(-30-A)(A2 -120A+1100)=0. -A karakterisztikus egyenlet megoldsa,
a mtrix sajtrtkei:
(-30-A)=O => A1 =-30, (A2 -120A+1100)=0 => A2 =10, A3
=110. -A mtrix sajtvektorai, a sajtrtkek behelyettestse a lineris
algebrai egyenletrendszer-
be: A A1 =-30 sajtrtkhez tartoz sajtvektor:
13
-
(-30-/L 1)n1x =l (30- A1)n1Y- 40n1z =O
-40 n1Y +(90- A1 )n1z O =>
A 2. s 3. egyenletbl: n1Y = n1z O . Az l. egyenletbl: n1x
tetszleges rtk.
Legyen a sajtvektor egysgvektor, gy:
A /L 2 =l O sajtrtkhez tartoz sajtvektor:
(-30+30)nlx ol (30+30)n1Y 40n1z=O .
-40 n1Y +(90+ 30)n12 = O
(-30 /LJn2x =l (-30-10)n2x =l (30-/L 2 )n2Y -40n2z = =>
(30-10)n2Y -40n2z O .
-40 n2Y +(90- /LJn2z = O -40 n2Y +(90 -l O)n2z = O Az l.
egyenletbl: n2x = O . A 2., vagy 3. egyenletbl: n2Y = 2n2z.
Legyen a sajtvektor egysgvektor: ~n~Y +4n~Y =l,=> n2 y =Js.
Teht a /L 2 -hz tartoz sajtvektor: [~J=[ o Js Jsl A /L3 = 110
sajtrtkhez tartoz sajtvektor:
(-30-/L3 )n3x =l (-30-110)n3x =l (30-/L3)n3Y -40n3z = =>
(30-110)n3Y -40n3z = .
-40n3Y +(90-/L3)n3z = -40n3Y +(90-110)n3z = Az l. egyenletbl:
n3x = O . A 2., vagy 3. egyenletbl: n3Y = -2n3z.
Legyen a sajtvektor egysgvektor: ~n~Y + 4n~Y =l, =>
Teht a /1,3 -hz tartoz sajtvektor:
2.6.5.feladat: Vektor adott irnnyal prhuzamos sszetevjnek
meghatrozsa
Adott: b= (20T +40]- 30k) m, ea = (0,8] -0,6k).
Feladat: A b vektor ea egysgvektorral prhuzamos hu sszetevjnek
meghatrozsa. x
14
Kidolgozs: A ho prhuzamos sszetev meghatrozsa:
~=(e. b) e.= [[o o,8 -o,6t~~o J] e"= (32+ 18) e" so e. ho= 50
e(/= 50(0,8] -0,6k) =(40} -30k) m.
15
-
3. ALAPFOGALMAK A fejezet rviden sszefoglalja a legfontosabb
szilrdsgtani fogalmakat, amelyek megtall-
hatk az [4] irodalomban is. Test modell: olyan idealizlt
tulajdonsgokkal rendelkez test, amely a valsgos testnek a
vizsglat szempontj blleglnyegesebb tulajdonsgait tkrzi. (A test
lnyegesnek tartott tulajdonsgait megtartjuk, a lnyegtelennek tlt
tulajdonsgokat pedig elhanyagoljuk.)
Szilrdsgtan: a terhels eltt s utn is tarts nyugalomban lv,
alakvltozsra kpes testek kinematikjnak, dinamikjnak s
anyagszerkezeti viselkedsnek lersa.
Terhels: az ltalunk vizsglt rendszerhez nem tartoz testektl
szrmaz ismert nagysg hatsok (ismert erhatsok). Szilrd halmazllapot
testeknl ezek a hatsok (a terhelsek) ltalban felleti rintkezsset
valsulnak meg. (Terhels = ismert kls errendszer.)
A tarts nyugalom dinamikai s kinematikai felttelei: a testre hat
errendszer egyenslyi, a test megtmasztsa nem enged meg
merevtestszer elmozdulsokat
Egyenslyi errendszer: az az errendszer amely zrus nyomatki
vektorteret hoz ltre. Az egyensly leggyakrabban hasznlt
felttele:
ahol F az errendszer ered ervektora s MA az errendszer A pontra
szmtott ered nyo-matkvektora. Az A pont a test (vagy a tr)
tetszleges pontja. Kinematika: szilrdsgtanban lerja a test
pontjainak a terhels hatsra bekvetkez elmoz-
dulsait s a test alakvltozsait.
Dinamika: szilrdsgtanban lerja a terhels hatsra a testben fellp
bels errendszert. Anyagszerkezeti viselkeds: megadja az alakvltozs
s bels errendszer kztti kapcsola-
tot.
Merev test: brmely kt pontjnak tvolsga lland (a pontok tvolsga
terhels hatsra sem vltozik meg).
Szilrd test: Alakvltozsra kpes test. Pontjainak tvolsga,
egyeneseinek egymssal bezrt szge terhels hatsra megvltozik
Kontinuum: Olyan szilrd test, amelynek tmegeloszlsa s mechanikai
viselkedse folyto-nos fiiggvnyekkel rhat le.
Rd: Olyan test amelynek egyik mrete lnyegesen nagyobb mint a
rmerleges msik kett. Merevtestszer mozgs: ha a mozgs sorn a test
pontjai gy mozdulnak el, hogy tvolsguk
nem vltozik meg. A merevtestszer mozgs kt esete: - merevtestszer
halad mozgs,
- merevtestszer forg mozgs.
Alakvltozs: ha a test pontjai terhels hatsra egymshoz kpest gy
mozdulnak el, hogy a test anyagi geometriai alakzatai (hossz, szg,
fellet, trfogat) megvltoznak
16
Anyagi geometriai alakzat: a test pontjaival egytt mozg, egytt
alakvltoz geometriai forma.
Rugalmas alakvltozs: a terhels hatsra alakvltozott test a
terhels megszntetse (levte-le) utn visszanyeri eredeti alakj t.
- lineris rugalmas alakvltozs: a terhels s alakvltozs, a terhels
s bels errendszer, valamint az elmozduls s az alakvltozs kztt
lineris fiiggvnykapcsolat van.
- nemlineris rugalmas alakvltozs: a terhels s alakvltozs, a
terhels s bels errendszer, valamint az elmozduls s az alakvltozs
kztt nemlineris fiiggvnykapcsolat van.
Kplkeny alakvltozs: a test tehermentests utn nem nyeri vissza
eredeti alakjt. A szilrdsgtan tantrgy linerisan rugalmas testek kis
elmozdulsaival s kis alakvltozsai-
val foglalkozik. (Lineris feladatok eset n az elmozdulsok s az
alakvltozsok kicsik.) Kis elmozduls: a test pontjainak elmozdulsa
nagysgrendekkel kisebb a test jellemz geo-
metriai mreteinl. Kis alakvltozs: a test alakvltozst jellemz
mennyisgek lnyegesen kisebbek, mint egy.
8 D l, y D l.
Elemi krnyezet (elemi tmeg): Minden test vgtelen sok tmegpontbl
felpl rendszernek tekinthet.
elemi tmeg
A tmegpontokhoz gy jutunk, hogy a testet gondolatban vgtelen sok
kis rszre bontjuk. A kis rsz alakjt tetszlegesen vlaszthatjuk meg.
Lehet pldul kocka (elnevezse: elemi koc-ka). Tmegpont = elemi tmeg
= elemi krnyezet. Az elemi krnyezet llapotait az elemi krnyezet P
pontjhoz kttt mennyisgekkel rjuk le. A P ponthoz kttt mennyisgek
lehetnek:
-skalris mennyisgek (Pl. tmegsrsg, fajlagos alakvltozsi
energia), - vektor mennyisgek (Pl. elmozduls vektor, szgelfordulsi
vektor), -tenzor mennyisgek (Pl. alakvltozsi tenzor, feszltsgi
tenzor).
Vektor mennyisg: hrom skalr mennyisggel adhat meg. Tenzor
mennyisg: kilenc (3 x 3) skalr mennyisggel mtrixszal adhat meg. A
vektor s a tenzor koordinta-rendszertl fiiggetlen fizikai
(geometriai, mechanikai) meny-nyisg.
17
-
EGY RUGALMASPEREMRTK FELADAT A fejezet bemutatja a prizmatilats
hzott nyomott rd egyenslyi egyenletnek szrmaztat-
st Az l.a. brn egy l hosszsg s A keresztmetszet homogn
prizmatikus rd lthat [12] alapjn. A rd rdirny nslyval s a vglapon
megoszl ervel terhelt. A rd trfoga-tn egyenletesen megoszl nsly
stsgvektora p g (ahol p a rd anyagnak srsge, g a gravitcis
gyorsuls,) a rd jobboldali vglapjn megoszl, rdrny errendszer srsg
vektora p = P.-lx. A rd anyaga homogn izotrp s linerisan rugalmas,
rugalmassgi modu-lusa E.
A feladat megoldsa sorn modellezsi felttelezssel lnk. A rd
tetszleges keresztmet-szetben csak rdirny egyenletesen megoszl
normlfeszltsg bred. Az ilyen feladatot mechanikai szempontbl
egydimenzis feladatnak tekintjk, az eredeti feladattal egyenrtk
egydimenzis rdmodellt az l.b. bra szemllteti.
....
._----~~~~~----~~ x
a ~ l. bra: Hzott-nyomott prizmatikus rdfeladat s egy dimenzis
modellje
Az l. brn alkalmazott tovbbi jellsek: l= J:.e_-: a vonal menti
terhels konstans inten-zitsa, P= P.-: e., =pA vglapot terhel
megoszl er eredje, l a rd hossza, dV az elemi rdtrfogat, dx az
elemi rdhossz, AP a terhelt fellet, a dinamikai perem, A11 az
elmozduls
elrst tartalmaz fellet, a kinematikai perem.
4.1. A rd rugalmas peremrtk feladatnak egyenletei A
hzott-nyomott prizmatikus rd rugalmas peremrtk feladatnak
egyenleteit a statikban
s szilrdsgtanban tanult ismeretek alapjn szrmaztatjuk A vzolt
feladatesetn keressk az x irny u (x) elmozdulst, mint a hely
fggvnyt. Az elmozduls fggvny a rd sszes pontjnak elmozdulst magba
foglalja, ezrt szoks elmozdulsmeznek is nevezni.
Kinematikai vagy geometriai egyenlet:
du(x) &x=--, d x O
-
Megjegyezzk, hogy egy ltalnos trbeli rugalmas peremrtk-feladat
esetn az ismeretle-nek szma s a skalris egyenletek szma egyarnt
tizent, amelyek kiegszlnek a kinernati-kai s a dinamikai
peremfelttelekkeL
4.2. A rd rugalmas peremrtk feladatnak analitikus megoldsa Az (
4.1 )-( 4.5) egyenletekkel megadott rugalmas permrtk feladat
megoldsa ebben az egy-szer esetben analitikusan is elllthat.
Helyettestsk ( 4.1 )-t ( 4.2) egyeniethe
N= AE du . ( 4.6) d x
Ezutn a ( 4.6) kifejezst a ( 4.3)-s egyenslyi egyeniethe
helyettestjk
d( AE:) ___::: __ """-- + fx = O
d x (4. 7)
A rd homogn s prizmatikus, ezrt az AE szorzat kiemelhet zrjel
el, s gy a feladat-hoz megkapjuk az elmozdulsra vonatkoz
alapegyenletet
d 2 u AE-2 + fx O, (4.8) d x
amelyet kiegsztve a (4.4) s (4.5) peremfelttelekkel
u(O)=O, (4.9)
egyrtelmen megoldhatunk A ( 4.8) egyenlet trendezse utn kapott
egyenletet ktszer egyms utn x szerint integrl-
juk
( 4.1 O)
du =- /, x+ C l J dx dx AE 1'
( 4.11)
(4.12)
A ( 4.12) megoldsban szerepl CP C 2 integrcis konstansokat a (
4.9) peremfelttelekbl hatrozhatjuk meg. Az els peremfelttel
segtsgvel megkapjuk a msodik konstanst
u(O) 0=- 2~EO+C1 0+C2 => C2 =0, mg a msodik dinamikai
peremfelttel ( 4.11) felhasznlsval szolgltatj a az els
konstanst
20
azaz az els konstans
F_, +!J AE
Ezek utn az analitikus vagy tnyle9es megolds zrt alakban rhat
fel 4,(
( ) ~ , 2 F +!,l
az elmozduls
a rder
(4.14)
u x =-~x + x x x 2AE AE '
N (x) = AE du = fx (l x) + F: . dx
(4.13)
Egy mechanikai peremrtk feladat megoldsa tbbnyire csak egyszer
esetekben ismert (pl. a (4.13) s (4.14) analitikus megolds).
Bonyolult trbeli feladatesetn az analitikus megol-dst ltalban nem
tudjuk ellltani. Ekkor csak kzelt megoldssal tudunk szolglni. A
tovbbiakban ezen egyszer egydimenzis feladathoz a kzelt megolds
ellltst mutat-juk be.
21
-
MEGOLDSOK, ENERGIA ELVEK Bonyolult rugalmas peremrtk feladat
esetn csak kzelt megoldssal tudunk szolglni
[8]. A kzelt megoldssal szemben elvrsokat fogalmazhatunk meg,
mind az elmozduls s mind a feszltsg vonatkozsban, ezrt bevezetnk kt
defincit.
Kinematikailag lehetsges elmozdulsmez: az az u (x) elmozdulsmez,
amely folytonos s elegenden sokszor differencilhat, vala-mint
kielgti a kinematikai peremfelttelt
A definci alapjn az l.b. brn bemutatott feladatra fenn kell,
hogy lljon a kvetkez kt egyenlet
du* &x= dx' u*(O)=O.
Megjegyezzk, hogy elegend az egyszeri differencilhatsgat elrni.
Az is nyilvnval, hogy a tnyleges megolds mindig eleget tesz a
kinematikai lehetsges elmozdulsmez defi-ncij nak.
Statikailag lehetsges feszltsgmez : az a feszltsgmez, amely
kielgti az egyenslyi egyenletet s a dinamikai peremfelttelt
A definci szerint az J. b. brn bemutatott feladatra a feszltsgi
meznek, azaz az N rdernek ki kell elgtenie a kvetkez kt
egyenletet
d N -+fx=O, d x
Elmozdulsi mdszer: az olyan kzelt megoldst elllt mdszert,
amelyben az elsdleges ismeretlen mez a kinematikailag lehetsges
elmozduls. Ermdszer : az olyan kzelt megoldst elllt mdszer,
amelyben az elsdleges isme-
retlen mez a statikailag lehetsges feszltsgmez.
A gyakorlatban legelterjedtebb az elmozdulsi mdszerre alapozott
kzelt eljrs. Az ermdszer alkalmazsa ltalban lnyegesen bonyolultabb,
mint az elmozdulsi mdszer. Az utbbi vekben egyre tbb kutats
foglalkozik a kt mez egyttes kzeltsvel, amelyet a vegyes mezk
mdszernek nevezzk.
Jelen tantrgyban az elmozdulsi mdszerrel fogunk foglalkozni.
b,kQ~~!i!~~l}l~g91Q~~~l_!!~~ li!sgg~~!Y~11~~!~~~-y~~1~-~~~!21
a~leb_eJ~tl~gjg_[>Q.~kzelf~ ts.seJ. ~~91K~L?J!l~go!
-
u'= d( c5u) dx J v=N,
A mdszer szerint a clerivlatlan mennyisgek szorzatbl kivonjuk a
kiszmtott mennyis-gek szorzatnak integrljt
l d( c5u) l c5u Ni~ - J-- N dx + J c5u f,dx = O .
o dx o (5.3)
Figyelembe vve, hogy c5u (O)= O s c5u (l)= c5u1 , valamint
figyelembe vve a ( 4.5) dina-mikai peremfelttel t, trendezs utn
megkaphatjuk a virtulis munka elv varicis alakjt.
A virtulis munka elv varicis alakja egy dimenzis feladatra: lfd(
c5u) --Ndx
0 dx
l J c5u fxdx + F_, c5u1 J o
(5 .4)
a tnyleges megoldsnl a bels erk virtulis munkja megegyezik a kls
erk virtulis munkjval.
A (4.2) anyagtrvnybehelyettestse (5.4) egyeniethe megadja a
rugalmas peremrtkfel-adat gyenge alakjt.
Rugalmas peremrtk feladat gyenge alakj a : 1 d( c5u) d 1 J-- AE
::!!.,]x = J c5u f,dx + F_, c5u1 0 dx dx 0
(5.5)
Az (5.5) egyenlet igen fontos az elmozdulsra alapozott kzelt
megoldsok, gy a vgeselemesmegoldsok ellltsa szempontjbl is.
Gyengealakra alapozott kzelt megolds tulajdonsgai: az
elmozdulsmeznek kinematikailag lehetsgesnek kell lennie, a kapott
megolds integrl rtelemben kielgti az egyenslyi egyenletet s a
di-
namikai peremfelttelt
5.2. A teljes potencilis energia minimum elve A teljes
potencilis energia az alakvltozsi energia s a kls erk potenciljnak
sszege
[7]. A kls erk potencilja helyett szoks a kls erk virtulis
munkjnak mnusz egysze-resnek a fogalmt is hasznlni. gy a
teljelpotencilis energia
(5.6)
ahol U az alakvltozsi energia, W a kls erk virtulis munkja. Ez a
kifejezs tulajdon-kppen egy funkcionl.
Funkcionl: A matematikban azokat az opertorokat, amelyeknek az
rtkkszlete vals szmhalmaz, funkcionloknak nevezzk.
24
A (4.1)-(4.5) peremrtk feladathoz rendelt funkcionl, azaz a
teljes potencilis energia alak-ja
(5.7)
Ha (5.7)-t gy tekintjk, mint a u( x) tnyleges megoldsra felrt
teljes potencilis energia, akkor felvetdik a krds, hogy ehhez
kpestmilyen nagysg teljes potencilis energia li-ket szolgltat egy
u* (x) kinematikailag lehetsges kzelt elmozdulsmez? A kzelt
elmozdulsra vonatkoz teljes potencilis energia (5.7)-hez hasonlan
hatrozhat meg
11; (u*) = ~ J AE (du* ]2 dx J u* fxdx- F:: u; . 2 0 dx 0
(5.8)
Amint az a 3. brn is lthat a kzelt mez felrhat a tnyleges
elmozdulsmez s a va-ricija sszegeknt
u* (x)= u (x)+ c5u (x). (5.9)
A (5.8) potencilis energiba behelyettestve (5.9)-t
(5.10)
majd clszeren trendezve, az albbi kifejezst kapjuk
* ll (du)2 l 11P(u+c5u)=- JAE - dx- Jufxdx-Fxu1 + 2 0 dx 0 1 d(
c5u) d 1 +J-- AE ::!!.,}x- Jc5u Fx c5u1 + 0 dx dx 0
(5.11)
+~ JAE (d( c5u )J2 dx. 2 0 dx
Ha megfigyeljk (5.11) jobb oldalt lthatjuk, hogy az els sor
megegyezik az (5.7) tnyle-ges megolds teljes potencilis energia
kifejezs jobboldalvaL A msodik sor az (5.5) virtu-lis munkaelv
varicis alakjnak nullra rendezett alakjt szolgltatja. A harmadik
sor pedig egy kvadratikus kifejezs integrlja, ami biztos, hogy
nagyobb, mint nulla. Teht megllapt-hatjuk, hogy a teljes potencilis
energia minimummal rendelkezik a tnyleges megoldsnL
Az (5.11) msodik sorban az elmozduls varicija linerisan
szerepel, ez egyben a teljes potencilis energia els varicija s 611
P -val jelljk, mg a ham1adik sora az elmozduls varicijt
kvadratikusan tartalmazza s a teljes potencilis energia msodik
varicijt szol-gltatja, amelyet c5211P -vel jellnk.
25
-
A teljes potencilis energia els varicija: 1 d( c5u) d 1
c5IIP = f--AE~x- fu f>:dx F_>: c5u1 =0. 0 dx dx 0
(5.12)
A teljes potencilis energia msodik varicija:
52 II P = !_ f AE (d ( c5u) ) 2 dx 2. O , 2 0 dx
(5.13)
ami az u * kzelt megolds s a tnyleges megolds eltrsbl szrmaz
alakvltozsi energia.
Megjegyzs: Az u (x) tnyleges vagy egzakt megolds esetn mind az
els mind a mso-dik varici nulla, hiszen (5.5) teljesl mivel az
eltrs c5u =O. Az u* (x) kzelt megolds esetn elrjuk, hogy az els
varici legyen nulla, de a msodik varici 5 2 IIP 2. O kiad-dik.
Egy funkcionl els varicija elllthat a funkcionl c5u elmozduls
varicijnak ir-nyba vett derivlsval is azaz a Gateaux-fle derivlttal
[3]. Gateaux kiejtse: gat.
A teljes potencilis energia Gateux-fle derivltja:
{ ( )
2 d l l d u + AbU l =- - JAE ( ) dx- J(u+Ac5u)
dA A-=0 2 O dx O
Els lpsben vgezzk el a clerivlst A paramter szerint
{
1fd ( u) d (u+ Abu) 1f }l c5IIP = --AE dx c5u fxdx- Fz c5u1 , 0
dx dx 0 A-=0
(5.15)
majd a A= O helyettestst, s visszakapjuk (5.12) els varicit 1 d(
c5u) d 1
c5IIP = f--AE~x- fu f>;dx-~. c5u1 0 dx dx 0
(5.16)
A varici szmts elmletbl ismert, hogy egy funkcionl minimumnak
ltezshez szksges felttel, hogy az els varicija legyen zrus,
azaz
o 1 d( c5u) du 1 J-- AE :.:.:.:..c!x- J c5u f>:dx- F_>;
c5u1 , 0 dx dx 0
(5.17)
ami megegyezik a (5.5) virtulis munka elve varicis alakjval. Ez
azt jelenti, hogy konzer-vatv kls terhels esetn a kt elv rugalmas
peremrtk feladatokra nzve egyenrtk.
26
A teljes potencilis energia minimum elvre alapozott kzelt
megolds tulajdonsgai: az elmozdulsmeznek kinematikailag
lehetsgesnek kell lennie, a kapott megolds integrl rtelemben
kielgti az egyenslyi egyenletet s a di-
namikai peremfelttelt
5.3. Plda teljes potencilis energia minimum elvre Egy k merevsg
rugt F er terheli. Hatrozzuk meg a rg vgpontjnak x irny
u elmozdulst a teljes potencilis energia minimum elvnek
felhasznlsval!
4. bra: Rug terhelse koncentrlt ervel
A 1ugalmas rendszer teljes potencilis energija
(5.18)
Most a teljes potencilis energia kifejezse nem funkcionl, hanem
egy vals fggvny. A potencilis energia minimum elv rtelmben a
fggvnynek keressk a minimumt. A ltez-snek szksges felttele, hogy
els delivltja zrus legyen
:u [ IIP (u) J= o k u- F. (5.19) Az (5.19) egyenletbl pedig
talakts utn megkapjuk a jl ismert sszefggst az elmozdu-
lsra
F u=-
k (5.20)
A bemutatott plda megoldsi mdszere a legegyszerbb linerisan
rugalmas vgeselemes feladat, amely elvt tekintve megegyezik a
komplex geometrij s terhels rugalmas pe-remrtk feladat megoldsnl
alkalmazott vgeselem mdszerrel.
5.4. Ritz-mdszer A potencilis energia minimum elve nem csak
diszkrt rugbl felptett rugalmas szerke-
zet, hanem kontinuumok elmozdulsmezejnek kzelt meghatrozsra is
alkalmazhat [8]. Ebben a fejezetben az elv alkalmazst az l.b. brn
megadott hzott-nyomott rdfeladat kzelt megoldsnak ellltsra mutatjuk
be.
Legyen valamely egy dimenzis rugalmas peremrtk feladat
kinematikailag lehetsges el-mozdulsa az albbi alakban adott
(5.21)
ahol C 0, C1, C 2, ismeretlen paramterek. Ha ezt a kzelt
megoldst a (5 .8) funkcionl ba helyettestjk, akkor a teljes
potencilis energia a C 0, C1, C 2, paramterek tbbvltozs fggvnyv
vlik II; (C 0, C1, C 2,) .
27
-
A teljes potencilis energia minimum elv alkalmazsa ebben az
esetben azt jelenti, hogy egy tbbvltozs fggvny szlslikt keressk a
szksges felttel alkalmazsval
an __ P 0 aci (i= 0,1, 2,-J. (5 .
22)
Az (5.22) Ritz-mdszer alkalmazsa az ismeretlen paramterek szmval
megegyez line-ris algebrai egyenletrendszert eredmnyez azok
meghatrozshoz.
5.5. Pldk Ritz-mdszer alkalmazsra
5.5.1 Lineris approximci
Tekintsk ismt az l.b. brn adott feladatot. Keressk a feladat
kzelt megoldst az alb b i alakban
u* (x) C0 + C1x Ellenrizzk, hogy a (5.23) felttelezett megolds
kinematikailag lehetsges-e. A kinematikai peremfelttel
(5 .23)
(5 .24)
csak akkor teljesl, ha C0 =O, azaz a kinematikailag lehetsges
elmozduls a kvetkez ala-k
(5 .25) A derivlhatsg felttele
8*= du* =C x dx I (5 .26)
is teljesl, teht megllapthatjuk, hogy az (5.25) alak kzelt
elmozduls kinematikailag lehetsges.
A (5.25), (5.26) kpleteket behelyettestve (5.8) funkcionlba, a
J' l
n; (u*)= n; ( C1 ) - JAE ( C1 ) 2 dx fc1x f,dx- F,.CJ, 2 o o
kifejezst kapjuk. Az (5 .22) minimum felttel alapjn
minn; (eJ) an __ P 0 ac] l l
JAE C1dx J x f,dx- F,.l. o
A kijellt integrlst elvgezve s az ismeretlen paramtert
kifejezve
12 O AEC)- /, 2 -F)
28
l F;+ h
AE
(5.27)
(5.28)
(5.29)
A kzelt megolds:
az elmozduls:
arder:
l F;+fx-
u*(x)= AE
N*(x)=F; + fx!_ 2
(5 .30)
(5.31)
Ha sszevetjk a (5.30), (5.31) kzelt megoldsokat a megfelel
(4.13), (4.14) egzakt megoldsokkal akkor valban mind a kt esetben
lnyeges eltrs mutatkozik.
A kzelt megolds minstshez definilnunk kell a hiba fogalmt
A megolds hibja: az egzakt s a kzelt megolds kztti klnbsg [ll],
[13], [14] d ef
e( x)= uegzakt (x)-u* (x), (5 .32) ahol e( x) a hiba, amely x
-nek a fggvnye.
Gyakorlati szmtsokra a hiba energia normjt szoks alkalmazni
[ll], amely tulajdon-kppen a hibafggvnybl szmolt alakvltozsi
energia - a (5.13) alatti msodik varici -ngyzetgyke
(5.33)
ahol 1111 a norma jele, s a norma jel E indexe az energia
fogalomra utal. A hiba lineris approximci esetn:
d~f * e( x)= UegzakJ x) U (x)=
=(-_b_ x2 + P: + fxl x)- [ F; +J; t] = _ _b_ x2 + fxl x . 2AE AE
AE 2AE 2AE
(5 .34)
Az (5.34) hiba fggvnyt megvizsglva lthat, hogy a hiba a zrustl
klnbz j~ meg-oszl er esetn jelentkezik, de a rd vgn x= l
helyettestsnl az elmozduls hibja zrus. Azt mondhatjuk, hogy a rd
vgei az elmozdulsok kirtkelse szempontjbl optimlis pon-tok.
A hiba fggvny derivhja az alakvltozs hibjt adja
~:=-:~x+~~= ~(-x+~). (5 .35) Az (5 .35) derivltat megvizsglva
megllapthat, hogy a rd kzepn x= l l 2 helyettes-
tsnl az alakvltozs hibja zrus, teht az alakvltozsbl szmolt rder
ebben a pontban pontos. A feladatban a rder optimlis kirtkelsi
helye a rd felez pontja.
Az energia normaszerint rtelmezett hiba
29
-
(5 .36) ]
1 (d J2 IleilE = J AE _!!_ dx 2 o d-r
= !_(fx)2[x3 _!!_l+x!:_]t 2AE 3 2 4 0 AE 24
A vgeselemprogramoka megolds hibjt szintn energia normban adjk
meg. Joggal ve-tdik fel a krds, hogy hogyan vltozik a megolds
pontossga az approximci foknak nvelsekor? A kvetkez pldban az
elmozdulst kvadratikus fggvnnyel approximljuk.
5. 5.1 K vadratikus approximci
Tekintsk ismt az J.h. brn adott feladatot. Keressk a feladat
kzelt megoldst az albbi alakban
u* (x)= C0 + C1x+ C2x 2 .
Ellenrizzk, ismt, hogy a (5 .40) felttelezett megolds
kinematikailag lehetsges-e. A kinematikai peremfelttel
csak akkor teljesl, ha C 0 =O, azaz
A derivlhatsg felttele
* du* Ex -=C1 +2C2x, dx
is teljesl, teht az elmozduls (5 .42) alakja kinematikailag
lehetsges. Az (5.42), (5 .43) kpleteket behelyettestve (5.8)
funkcionlba azt kapjuk, hogy
(5 .40)
(5.41)
(5 .42)
(5 .43)
n; (u)= n; ( C1,C2) !_ fAE ( C1 + 2C2x )2 dx f( C1x + C2x 2)
fxdx- Fx ( CJ + C)2). (5 .44) 2 o o
A (5.22) minimum felttel szerint:
=>
(5 .45)
(5 .46)
30
A kijellt integrlsokat elvgezve
(5 .47)
(5 .48)
Az ismeretlen paramtereket (5 .47) (5 .48) egyenletekbl
kifejezve
c =-_l_ 2 2AE. (5 .49)
A kzelt megolds:
az elmozduls * ( ) F, +p) /,. 2 u x - _, x--~-x AE 2AE '
(5 .50)
a rder (5.60)
Ha sszevetjk az (5.50), (5.60) kzelt megoldsok~t a megfelel
(4.14), (4.15) egzakt megoldsokkal, akkor lthatjuk, hogy
megegyeznek.
Amint azt a kt klnbz approximci alkalmazsnllttuk (5. s 6. bra) a
kzelt megolds pontossgnak nvelsnek egyik lehetsges tja az
approximci foknak nvel-se. A tovbbiakban egy msik utat fogunk
tanulmnyozni, amikor is a tartomnyt rsztarto-mnyokra bontjuk, s
ezeken a rsztartomnyokan az ismeretlen elmozdulsmezt kln-kln
loklisan kzeltjk. Ezt abban a remnyben tesszk, hogy a szmts
pontossga a rsztartomnyok szmnak nvelsvel szintn nvelhet. A
rsztartomnyokat vges mret elemeknek, tmren vgeselemeknek fogjuk
nevezni. A rsztartomnyok (elemek) hatrain pedig csompontokat jellnk
ki s az approximcit a kzeltend mez csomponti rtkein keresztl
fejezzk ki.
A javasolt mdszer elnye, hogy knnyen programozhat s gy bonyolult
szerkezetek nagypontossg elemzsre nylik lehetsg.
Az egzakt, kvadratikus elmozdulst s a lineris kzelt elmozdulst,
valamint a megfelel rder megoldsokat a 5. s 6. bra
szemllteteti.
u
/ /
egzakt
,...,.... ~ u*(x) lineris
5. bra: Elmozdulsok
31
x
-
N(x) egzakt
lineris x
6. bra: Rderk
32
6. LOKLIS APPROXIMCI ELVE, VGESELEM DISZKRETIZCI EGYDIMENZIS
FELADATRA
A vizsglatainkat tovbbra is az ( 4.1 )-( 4.5) alatt definilt
peremrtk feladatra vgezzk. A vgeselem diszkretizci jelentse
vgeselemes feloszts, a tartomnyt rsztartomnyokra, azaz elemekre
osztsa. Az L hosszsg elemek hatrait csompontokjellik
a.
b.
c. x
t d. 7. bra: Kt elemes feloszts, approximci elemenknt
Az l.b. brn vzolt tartomnyt most gondolatban kt egyenl hosszsg
rsztartomnyra azaz vgeselemre bontjuk s az elmozdulsmezt az
elemeken kln-kln approximljuk. Az elemek sorszmt bekereteztk, az
elemek vgein feltntetett szmok jellik az elemek csomponti sorszmait
Az ismeretlen elmozdulsmezt elemenknt kln-kln linerisan kzeltjk (7.
c. s 7.d. brk) s gondoskodunk azok illesztsrl is. Az illeszts azt
jelenti, hogy az elemhatron kzs 2. csompontban az u2 elmozduls
megegyezik mindkt elmen. A 7. b. brn folytonos vonal jelli az
egzakt megoldst s szaggatott a kzeltst.
Ez a kzelts felpthet csompontokhoz rendelt approximcis fggvnyek
segtsgvel is, amint azt a 8. bra szemllteti. Egy-egy kzelt fggvny
(8. b. c. d.) az egsz (2 L) tar-tomnyon folytonos, de csak loklisan
a megfelel csomponthoz taroz elemek felett kln-bzik nulltl. Ezek a
fggvnyek Ritz-fle bzisfggvnyeknek is tekinthetk.
33
-
Az 8. a. brn vzolt kzelt fiiggvny (folytonos vonal) felpthet a
csompontokhoz rendelt hi (i= 1,2,3) alakfiiggvnyek lineris
kombincijaknt is:
3
u* (x) L hJ x) ui' (6.1) i= l
ahol az egyes mennyisgek bal als indexei a megfelel csomponti
sorszmokat jellik s megjegyezzk, hogy u1 =O.
_.,........
--
_.,........
-- _.,........ u 3 _.,........--
_.,........
----
a. l m 2 [J] 3 x
~ l~ l )ll b. l 12 3 x II-h2 ___________ u_2_:_0 __________
~
c. ~3 )ll x f' u3 ot= O ,r========J~ d . x
8. bra: Csompontokhoz rendelt loklis approximcis fiiggvnyek
Ahhoz, hogy a kzelt mez kinematikailag lehetsges legyen, az u1
=O kinematikai pe-remfelttelt el kell rnunk, vagyis a 8. b. brn
lthat fiiggvny nem jtszik szerepet az approximci ban.
A loklis approximci elvnek alkalmazsval a feladat visszavezethet
a Ritz-fle md-szer alkalmazsra [1], [ll], [13].
6.1. Hzott-nyomott rdelem Az 5.4. pontban lthattuk, hogy a kzelt
megolds keresse sorn a szerkezet teljes poten-
cilis energijt kellet felrni. Hasonlan kell eljrni, amikor a
vizsglt tartomnyt rsztarto-mnyokra, azaz vgeselemekre bontjuk. A
szerkezet teljes potencilis energija az egyes ele-meken szmolt
potencilis energik sszegeknt llthat el a koncentrlt er munkjval
egyiitt
34
(6 .2)
ahol az e index a vgeselemek sorszmt jelli. Megjegyezzk, hogy a
koncentrlt er mun-kjt nem szoks valamely elem teljes potencilis
energijhoz rendelni, csupn a szerkezet teljes potencilis
energijhoz. Itt s a tovbbiakban kzelt megoldsrl fogunk beszlni, de
a korbban alkalmazott"*" jellst a jobb fels indexben elhagyjuk.
Az elemen szmolt teles potencilis energia
(6.3)
Vizsgljuk meg a 7.d brn s a 9. brn is vzolt 2-es sorszm
vgeselemen az elmozdu-ls approximcijt
t~ ------- ----j.
-
A ( 6 . 6 ) k p l e t a l k a l m a s a z e = l s o r s z r n e
l e m e l m o z d u l s n a k a l e r s r a i s a megfelel
i = l s j = 2 c s o m p o n t i e l m o z d u l s b e h e l y e
t t e s t s v e L
A ( 6 . 6 ) elrnozdulsrnez i s m e r e t b e n a z ( 4 . 1 ) e g
y e n l e t s e g t s g v e l s z m o l h a t j u k a z a l a k v l
-
t o z s t ( a c l e r i v l s t rtelemszeren c ; s z e r i n t h
a j t j u k v g r e ) :
8
~ ( c ; ) = d u e ( c ; ) = u j - u i = [ - 1 ! _ J [ u i J = [
u . u .J[~]
x d c ; L L L u j
1
1
! _ (
6
7
)
L
A l k a l m a z v a a ( 4 . 2 ) a n y a g t r v n y t , m e g h
a t r o z h a t a z e l e m e n a rder i s
E z e k u t n f e l r h a t j u k a z e - d i k e l e m p o t e
n c i l i s e n e r g i j t i s ( 6 . 6 ) s ( 6 . 7 ) s e g t s g v
e ! , ( 6 . 3 )
f e l h a s z n l s v a l :
A ( 6 . 9 ) els i n t e g r l j a a z e l e m u e a l a k v l t
o z s i e n e r g i j a , a m s o d i k i n t e g r l a m e g o s z
l
errendszer W e r n u n k j a . A c s o m p o n t i p a r a r n t
e r e k a z i n t e g r l s s z e m p o n t j b l k o n s t a n s
-
n a k tekinthetk e z r t k i e m e l h e t j k a z i n t e g r l
j e l e l
A ( 6 . 1 0 ) - b e n lv r n t r i x e g y e l e m n e k i n t e
g r l j a
3 6
L l }
~
AE
u i ] o _ A E
L 2
A E
L
( 6 . 1 0 )
( 6 . 1 1 )
E z t v i s s z a h e l y e t t e s t v e ( 6 . 1 0 ) - b e
U ' =~[u, ui][-~ -ArJ[:}~~'r!f'~',
( 6 . 1 2 )
a h o l a 2 x 2 - e s r n t r i x o t a z e e l e m r n e r e v
s g i r n t r i x n a k n e v e z z k s K e - v e l j e l l j k ,
a
fggleges 2 x l - e s o s z l o p v e k t o r t s a v z s z i n t
e s l x 2 - e s s o r v e k t o r t a z e e l e m c s o m p o n t
i
e l m o z d u l s v e k t o r n a k n e v e z z k s q e , q e r
- v e l j e l l j k , a h o l T a t r a n s z p o n l s j e l e
.
A ( 6 . 9 ) - b e n szerepl m s o d i k i n t e g r l a kls er r
n u n k j a a z e e l e r n e n w e
A ( 6 . 1 3 ) o s z l o p v e k t o r e l e m e i n e k i n t e
g r l s a u t n
K ] - f J i ; d q = ( q - ; : J~.[
a z t k a p j u k , h o g y
2
J : . L
2 '
a h o l a 2 x l - e s o s z l o p v e k t o r a z e l e m t e h
e r v e k t o r a s f ; - v e l j e l l j k .
V g l i s e g y e jel e l e m p o t e n c i l i s e n e r g i j
a
3 7
( 6 . 1 3 )
( 6 . 1 4 )
( 6 . 1 5 )
( 6 . 1 6 )
( 6 . 1 7 )
-
6.2. Szerkezeti mtrixok Az elemek potencilis energijnak
ismeretben felrhatjuk a szerkezet teljes potencilis
energijt
l +-[u 2 2 [
AE
u,] - ~: (6.18) A szerkezet teljes potencilis energija tmrebben
is trhat, hiszen a szomszdos elemek
kzs csompontjban az elmozduls megegyezik- jelen esetben u 2- gy
rtelemszeren csak egyszer szerepeltetjk a kifejezsben, ezltal
biztostjuk az elemek illesztst:
f,L AE AE 2
-- o L L [:J[ul l uJ] AE 2 AE AE uJ] f,L n p ( ul,u2,u3) =-[ul u
2 u 2 . (6.19) 2 L L L
AE AE f,L F o --L L -+x 2 .
Az elemek illesztsn tl van egy msik fontos felttel - amit mg
teljestennk kell - a ki-nematikai peremfeltteL Ez azt jelenti, hogy
a befalazsnllv csompontban gondoskod-nunk kell arrl, hogy u1 =O
legyen
/,L AE AE 2 o L L [:,]-[a l u 3] AE 2 AE AE u3] fxL (6.20)
np(u2,u3)=-[0 u 2 u 2 2 L L L
AE AE u 3 fxL F o -+ L L 2 x
Figyeljk meg, hogy nullval szorozzuk a merevsgi mtrix els sort s
oszlopt, a teher-vektor vonatkozsban pedig csak az els elemet. Ezrt
az els sor s oszlop a szerkezeti mt-rixbl s els elem a szerkezeti
vektorbl elhagyhat,
38
[2 AE _ AE l r !, L l
u,]_+ A: [:J[u, u,] f/+F,' (6.21) ahol a jobboldal els tagjban a
2 x 2 -es mtrixot szerkezeti merevsgi mtrixnak nevezzk s K -val
jelljk, a csomponti elmozdulsokat tartalmaz fiiggleges 2 x l -es
oszlop- s a vzszintes l x 2 -es sorvektort szerkezeti csomponti
elmozduls vektornak nevezzk s q, q T -vel jelljk, vgl a 2 x l-es
oszlopvektort amely a szerkezet terhelst tartalmazza szerkezeti
tehervektornak nevezzk s ! -vel jelljk. E jellsek bevezetse utn
(6.21) a szerkezeti mtrixokkal is felrhat:
( ) l T T IIP q =-q Kq -q ! = 2= = =
(6.22)
6.3. A csomponti elmozdulsok meghatrozsa A szerkezet (6.21)
teljes potencilis energija a csomponti elmozdulsi paramterek
ktvl-
tozs fiiggvnye. A potencilis energia minimum elv rtelmben
keressk ennek a tbbvlto-zs fiiggvnynek a minimumt. A minimum
ltezsnek szksges felttele a Ritz-mdszernl is bemutatott (5.22)
szerint
minllP ( u2 ,u3 )
Ugyanez tmrebben is felrhat
0= an p(!!).
= aq
A (6.24) alatti mveleteket elvgezve, a
8Jl, (2) a(~2"K2 _2r! J 0= = Kq-[,
aq aq
sszefiiggst kapjuk, ami trendezs utn egy lineris algebrai
egyenletrendszer:
azaz
[
2 A: AE L
Kq=f,
39
(6.23)
(6.24)
(6.25)
(6.26)
(6 .27)
-
Ez a lineris algebrai egyenletrendszer kt egyenletet s kt
ismeretlent tartalmaz. Mivel az egytthatk mtrix determinnsa
nyilvnvalan nem nulla biztos, hogy megoldhat a csom-ponti elmozduls
paramterekre:
3 fxL2 u=---
2 2 AE (6 .28)
AE
A rderket (6. 8) felhasznlsval llthatjuk el:
N 1 (r;)=AE[-Ll !_][u1 ]=AE[-l !_J[(3 r L'O FL J]=.!_+ L+F., L U
L L __ Jx_+_._x- 2 lx x 2 2 AE AE
A l O. brn brzolt eredmnyek alapjn lthatjuk, hogy a rder
vonatkozsban a rd-elemek felez pontjai optimlis kirtkel helynek
bizonyulnak Ez ltalban csak akkor ll fenn, ha a tartomnyt egyenl
hosszsg elemekre osztjuk.
l O. bra: A rder eloszlsa a szerkezet mentn
Megiegvzs: A (6.23) alatti mveleteket az albbiakban az rthetsg
kedvrt ms mdon is bemutatjuk a lpsek teljes rszletezsveL
Elszr vgezzk el (6.21)-ben kijellt szorzsokat
u (f"L +FJ 3 2 x ' (6.29) s az eredmnyt helyettestsk be (6.23)
megfelel egyenleteibe:
O allp(u,,u,) a{1-Tl2(u,)' -2u2u3 +(u,)']-u,f,L u,( If+ F', J}_
(6 .30)
40
=!_ AE[-2u +2u ]-(f~.L +F.J= AE[-u +u ]-(h.L +F.J. 2L 2 3 2"' L
2 3 2 x (6.31) Ha megnzzk a (6 .30) alatt kapott eredmnyt, akkor
ltjuk, hogy (6 .27) els sort kaptuk
vissza, hasonlan (6.31) alatti eredmny a (6.27) sszefggs msodik
sorval egyezik meg. 6.4. A vgeselem mdszer gondolatmenetnek
sszefoglalsa
A vgeselem-mdszemek a 6. fejezetben bemutatott eljrsa alapjn
sszefoglaljuk a legfon-tosabb lpseket, amelyek egy ltalnos trbeli
rugalmas feladatra is fennllnak [6].
A vgeselem mdszer lpsei: A vizsglt szerkezetet gondolatban vges
szm rszre, azaz elemekre bontjuk. A keresett megoldst elemenknt kln
- kln kzeltjk. Az elemek valsgos kapcsoldsnak megfelelen az
elemeket egymshoz illeszt-
jk. Erre szolglnak az elemek hatrain kij ellt kapcsoldsi pontok,
vagy csom-pontok, illetve azok elmozdulsai. gy a teljes szerkezetre
rvnyes kzeltst ka-punk, amely mr csak a csompontokjellemz
elmozdulsait foglalja magba.
A teljes szerkezetre ismert kzelts alapjn felrhat a szerkezet
alakvltozsi energija s a kls erk munkja (azaz a teljes potencilis
energia) a csomponti elmozdulsok fggvnyben.
A szerkezet mozgst korltoz knyszereket is csompontokra vonatkoz
kinema-tikai elrsokkal vesszk figyelembe. Ez tbbnyire azt jelenti,
hogy a megfelel csompont minden-, vagy adott irny elmozdulst
meggtoljuk
Energetikai megfontolsokbl ( a teljes potencilis energia minimum
elve ) szr-maztathat a kzeltsben felvett sszes csomponti paramter (
elmozdulsi koor-dintk) kiszmtsra szolgl egyenletrendszer. Linerisan
rugalmas szerkezet statikus terhelsemellett ez gyakran nagymret
lineris algebrai egyenletrendszer. Az egyenletrendszer a szerkezet
egyenslyt fejezi ki.
Az egyenletrendszer megoldsa utn a csomponti paramterek
ismeretben, meg-hatrozhat brmelyik szerkezeti elem szilrdsgtani
llapota, azaz tetszleges pontban megkaphatjuk az elmozdulsi,
alakvltozsi s feszltsgi llapot jellemzit.
41
-
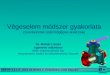
6.5. Rcsos szerkezet vizsglata hzott-nyomott rdelemekkel
;2 A;o=-----m=-------~~--~~
ll. bra: Rcsos szerkezet Az eddigi vgeselemes szmtsnl
kihasznltuk, hogy a x s ; koordinta tengelyek egy-
irnyak A tovbbiakban olyan szerkezetet fogunk vizsglni, ahol a
rdelemek szget zrnak be egymssal.
Adott a ll. brn lthat rcsos szerkezet geometrija, terhelse a
vgeselmes felosztssaL Az adatok szmszer rtkei ismertek: L1 = l m,,
L 2 = .J l+ 22 = J5 m,
A1 = l o-4 m2 , A2 = 2 l o-4 m
2 ,
O . l 2 a 1 = szna2 = j5' cosa2 = J5. Anyagjellemzk mindkt rd
aclbl van E = 2 l 011 ~
m
Terhels: FY =l OON. A megolds sornjellje rendre U, V az x, y
irny elmozdulst. A kinematikai peremfel ttelek: U1 O, ~=O, U 2= O,
v;= O. A eljrs alkalmazsa sorn gy, mint korbban most is a szerkezet
teljes potencilis energi-
jt rjuk fel: 2
IIP =III; FYV;. (6.32) e=l
Az elemeken megoszl er nem mkdik, ezrt az egyes elemek
potencilis energiaJa egyenl a megfelel alakvltozsi energival.
Felhasznlva a loklis koordintarendszerben felrt (6.27) kifejezst a
kt rdra az alakvltozsi energia
[ A1E _ A,El Ill =I[ UJ uJJ LI /~[:J p 2 J 3 AE
__ J_
LI LI
(6.33)
[ A,E _ A2El
II 2 I[u2 u2J L2 A:~ [:J p 2 2 3 A E __ 2_
L 2 L 2
(6.34)
42
ahol a kt klnbz elemenamegfelel loklis koordinta rendszerben
(bal fels index jel-li) rtelmezett u; *uJ elmozduls nem azonos.
Hiszen kt klnbz irny ; 1 , ; 2 tengely-hez tartoznak. Ezt a problmt
csak gy tudjuk feloldani, ha kzs koordintarendszert alkal-mazunk,
azaz a globlis x, y rendszert.
12. bra: Az elmozduls transzformcija
A 12. brn lthat geometriai viszonyok alapjn a loklis s globlis
elmozdulsok kztti kapcsolat:
[UJ [cosa] u=Ucosa+Vsina=[cosa sina] =[U V] .. V szna (6.35) Az
e elem helyi s globlis koordintarendszerben vett csomponti
elmozdulsainak
transzformcis sszefiiggse:
[ut] [cos ae sina e O O J[~'] (6.36) u; = O O cosa, sina, ~; Az
e= J elem elmozdulsnak transzformcija ( a 1 O):
[:;]=[~ ~ ~ ~J[~:] (6.37) Az e= 2 elem elmozdulsnak
transzformcija (a 2* O):
o o ][~'] 2 1 U3 J5 J5 V;
(6.38)
Fejezzk ki (6.33) s (6 .34) alakvltozsi energikat a globlis
elmozdulsokkal
43
-
[ J ] A , E
_ A
1
E l
l
U , V , ] ~ ~ -~E
L I l
I I I
- [ U I ~
A
1
E [ a
p
2
o o L I
L I
2
o
J S
l
o
[ A
2
E
_A
2
El~
2 l [
~]
J S
L 2
L 2 J S
I I P = - u 2 v 2 u 3
2
_ A
2
E
A 2 E O
2
o
J S
L 2
L 2
o
l
J S
A k i j e l l t s z o r z s o k a t e l v g e z v e :
A I E
o
- A I E
L I
L I
I I I = i [ u
v 3 ]
o
o o
~
u 3
p 2 I
- A I E
o
A I E
L I L I
o
o o
4 A
2
E
2 A
2
E
_ 4 A
2
E
5 L
2
5 L
2
5 L
2
2 A
2
E
A 2 E
_ 2 A
2
E
I I
2
= i [ u
v 2 u 3
~]
5 L
2
5 L
2
5 L
2
p 2 2
_ 4 A
2
E
_ 2 A
2
E
4 A
2
E
5 L
2
5 L 2
5 L 2
_ 2 A
2
E _ A
2
E
2 A
2
E
5 L
2
5 L 2 5 L 2
4 4
o ] ~']
o o
( 6 . 3 9 )
o
l
o U
3
'
~
l
o
~ ][~:} ( 6 . 4 0 )
J S
2
o
J S
J S ~
o
[~l
o
o
( 6 . 4 1 )
o
_ 2 A
2
E
5 L
2
_ A
2
E
[~l
5 L
2
2 A
2
E
5 L 2
( 6 . 4 2 )
A 2 E
5 L 2
A s z e r k e z e t t e l j e s p o t e n c i l i s e n e r g i
j a
l
V ; ]
I I P = - [ U I
~
u 2
~
u 3
2
A I E
o
o
o
- A I E
o
u l
L I
L l
o
o
o
o
o
o
~
o o
4 A
2
E
2 A
2
E
_ 4 A
2
E
_ 2 A
2
E
5 L
2
5 L 2
5 L
2
5 L
2
u 2
( 6 . 4 3 )
o
o
2 A
2
E
A
2
E
_ 2 A
2
E
_ A
2
E
-Fy~
5 L 2
5 L
2
5 L
2
5 L
2
v 2
_ A
1
E
o
_ 4 A
2
E
_ 2 A
2
E
( A , E + 4 A
2
E J
2 A
2
E
L l
5 L
2
5 L 2
L
1
5 L
2
5 L
2
u 3
o o
_ 2 A
2
E _ A
2
E
2 A
2
E
A
2
E
5 L
2
5 L
2
5 L
2
5 L
2
~
H a f i g y e l e m b e v e s s z k a k i n e m a t i k a i p e
r e m f e l t t e l t , h o g y U
1
= O , ~ = O , U 2 = O , ~ = 0 ,
v a g y i s a z els n g y s o r s o s z l o p n u l l v a l s z
o r z d i k , a k k o r a z e n e r g i a k i f e j e z s l n y e g
e s e n
egyszersdik:
( 6 . 4 4 )
(
A
1
E + 4 A
2
E J
I I P = i [ u 3 v ] L l 5 L 2
2
3
2 A E
_ 2 _
5 L 2
A ( 6 . 4 4 ) k i f e j e z s t m r e b b e n i s r h a t
( 6 . 4 5 )
A l k a l m a z v a a p o t e n c i l i s e n e r g i a m i n i
m u m e l v t
= >
o = a I I P ( ! ! )
= a q ,
( 6 . 4 6 )
s a c l e r i v l s t v g r e h a j t v a
( 6 . 4 7 )
E n n e k t r e n d e z s e u t n a j l i s m e r t l i n e r i
s e g y e n l e t s z e r t k a p j u k :
( 6 . 4 8 )
4 5
-
amely rszletesen is felrhat
A megolds a globlis koordintkra
U =-2FyLl =-2 1001 =-10-sm 3 A E l o-4 2 l Oli ' l
V;= 2 FyL1(5A1 L2 + 2] 2 1001 (510-4)5 + 2J=Io-s( 2 +s)5Jm.
A1E 2 A 2 L1 l 0_4
2 l Oli 2 2 l o-4 4
A megolds a rudak loklis rendszereiben (6.37) s (6.38) alapjn
o
[:}[~ o o o l O] _1~-s =[ O ]m o -10~ ' w-'( 2+ 5~J
(6 .40)
o
[:n=[~ l o ~l o =[~.;0_,lm )5 -J o-s o 2 w-'(2+5~J )5 (6.41) A
rderk kiszmtsa (6. 8) felhasznlsval trtnik
Nl A,Es; (q)= A,E[ ~: :, ][:i]= W'. 2. lOu [~l 7][_1~-s J -200N,
(6.42) (6 .43)
A szerkezetet csak koncentrlt er terheli ezrt a
vgeselem-mdszerrel itt ellltott megol-ds most azonos az analitikus
megoldssal.
46
6.6. V geselem programrendszerek ltalnos felptse
a) Adatbeviteli rsz/modul: A szerkezet geometriai felptsnek
megadsa: pontok, vonalak, felletek, trfo-gatok.
A szerkezet vgeselem hlzatnak megadsa: elemek, csompontok
Szempontok
- Azokon a tartomnyokon legyen srtett a feloszts, ahol a
mechanikai mennyi-sgek erteljesebb vltozsa vrhat.
-A koncentrlt erk l nyomatkok tmadspontjra essen csompont. - A
megtmasztsi helyekre szintn legyen felvve csompont.
A szerkezet anyagnak megadsa. Az anyagjellemzk geometriai
(vonal, fellet, trfogat), vagy vgeselem jellemzkhz (vges elemek) is
megadhatk. Specilis eset:
- Rdfeladatoknl itt kell megadni a rd keresztmetszeti jellemzit
is. Pl. A, lx, ... - Hj-, lemez- s trcsafeladatoknl itt kell
megadni a vastagsgi mretet.
A szerkezet terhelsnek megadsa (koncentrlt, megoszl terhels,
hmrsklet eloszls,
A szerkezet megtmasztsnak megadsa. - Megtmaszts (nincs
elmozduls), -Rugalmas gyazs (rugllandk),
-Elrt elmozduls (kinematikai terhels). b) A vgeselem-szmtsi
rsz/modul.
Az elemek merevsgi mtrixainak s csomponti terhelsvektorainak
ellltsa. Az egsz szerkezet merevsgi mtrixnak s terhelsi vektorainak
(egyszerre tbb jobb oldal is lehetsges) ellltsa. A kinematikai
peremfelttelek figyelembevtele (megfelel sorok s oszlopok tr-lse).
A szerkezet lineris algebrai egyenletrendszernek megoldsa => a
szerkezet cso-mponti elmozdulsainak meghatrozsa. Alakvltozs,
feszltsg (bels erk) szmtsa elemenknt a csompontokban, vagy az elem
bels pontjaiban. A csomponti rtkeket az egyes elemek csompon-ti
rtkeinek tlagolsval szoks ellltani.
c) Az eredmnyek szemlltetst vgz rsz/modul.
A felhasznl eldnti, hogy a szerkezet szilrdsgtani llapotai kzl
mit vizsgl rszletesen, mit szemlltet.
A szerkezet pontjainak elmozdulst (defonnlt alak). Feszltsgeket
(az egyes feszltsg-koordintkat kln-kln, vagy a reduklt
fe-szltsgeket), ignybevteleket, tmaszterket
47
-
7. ELEMCSALD A kereskedelmi szoftverekben leggyakrabban n.
izoparametrikus elemeket alkalmaznak.
Az "izoparametrikus" jelz azt jelenti, hogy a geometria lekpzsre
alkalmazott ( csompon-ti) paramterek szma azonos az ismeretlen mez
kzeltsre felvett paramterek szmval [l]. Ez azt is jelenti, hogy
ugyan azon alakfiiggvnyeket alkalmazzuk a geometria lekpezs-re,
mint az ismeretlen mez kzeltsre. Az elem tpus szleskr elterjedse
elssorban an- nak ksznhet, hogy az elem merevsgi mtrixnak s
tehervektornak ellltsakor az integrls knnyen vgrehajthat. Egyarnt
alkalmazhat egy-, kt- s hromdimenzis fel-adatokra.
A valsgban jelentkez mechanikai feladatok ltalban trbeli
jellegek, azonban a mecha-nikai problmk egy rsze bizonyos felttelek
esetn visszavezethetk l dimenzis (lD-s), illetve skbeli 2 dimenzis
(2D-s) feladatokra. A 2D-s feladatok kzl az albbi hrom
forma-lizmust tekintve hasonlan trgyalhat [1], [6], [8], [14]:
ltalnostott skfeszltsgi llapot feladat, azaz trcsafeladat,
skalakvltozsi feladat, tengelyszimmetrikus feladat.
Ebben a fejezetben az lD-s s 2D-s elemekkel rszletesen
foglalkozunk, a 3D-s elemek szrmaztatsa az elzekhez nagyon hasonlan
trtnik.
A leggyakrabban alkalmazott izoparametrikus elemek:
13. bra: 2 s 3 csompont rdelemek
2 D-s elemek
~DOD 14. bra: 3 s 6 csompont hromszg-, 4 s 8 csompont ngyszg
elemek
3 D-s elemek
15 bra: 4 s 10 csompont tetrahedron-, 8 s 20 csompont hexahedron
elemek
48
Az itt brzolt egyenes l elemek- csak az lek vgpontjain
tntetettnk fel csompontot-lineris kzeltst tartalmaznak, mg a grblt
l elemek, amelyeknl az oldalfeleznl is lthat csompont kvadratikus
kzeltst alkalmaznak mind a geometrira s mind az
elmozdulsmezre nzve. A kvadratikus elemekkel pontosabb megolds
nyerhet, hiszen a vizsglt ta1tomny geometrijt jobban megkzelthetjk
s az ismeretlen elmozdulsmez is magasabb fok fiiggvnnyel
approximljuk.
Az l D-s elemekkel termszetesen skbeli s trbeli szerkezetek is
vizsglhatak, mint ahogy a 2D-s elemek lehetnek hjelemek is, amelyek
alkalmasak trbeli lemez-, illetve hjszerkeze-tek vizsglatra is. A
tetrahedron s hexhedron grg kifejezsek rendre a megfelel
geomet-riai alakzat oldallapjainak a szmt jelentik, azaz tetra= 4,
hexa=6.
A tovbbiakban rszletesen megmutatjuk a kt csompont rdelem s a
ngy csompont skbeli elem merevsgi mtrixnak s tehervektornak
izoparametrikus szrmaztatst
7.1. lD-s hzott nyomott rdelem A vgeselem programokban a
hzott-nyomott rdelemet angolul "Rod" vagy "Truss" elem-
nek szoks nevezni. Vizsgljuk ismt a 4. fejezetben is bemutatott
hzott-nyomott rdfeladatot (J 6. bra.).
~ ,. ~.c ,. F a. r 7 ,_/ L L .. : y le=2i x b.
c.
o
16. bra: l D-s elem c; x lekpezse
Tekintsk most csak az e= 2 msodik elemet, amely ltalnos i, j
csompont prral adott! A 16. brn a rdelemhez egy loklis n.
termszetes cg koordintatengelyt ktttnk. Keres-sk a termszetes cg
koordintj pont s a hozztartoz pont globlis x koordintja kztti
kapcsolatot, azaz a lekpz fiiggvnyt. A cg tengelyre merlegesen
felmtjk a csompontok
49
-
x koordintit, majd egyenessel sszektve megkapjuk a lekpzs fggvny
kpt. A q ten-gelyen egy tetszleges P( c;) pontbl fgglegesen
felvettve megkapjuk a hozzrendelt P' (c;) kpt, vagyis azt az x -et,
amely az adott q -hez tartozik. A lekpz fiiggvny meredeksge s x
tengellyel vett metszspontja alapjn knnyen felr-
hatjuk az egyenes egyenlett, amelyet utna clszeren trendeznk
x( c;)= + +xi l l 2 =2(1-c;)xi+"2(i+c;)x1 , (7.1)
ahol a csomponti koordintk egytthati a h1 (c;)=!_( 1- c;) 2 s a
h 2 (c;) = !_ (l + c;) az n. 2 alakfggvnyeknek
l~ 17. bra: A 2 csompont izoparametrikus elem alakfggvnyei
Az elmozdulsmezt ezen kt alakfiiggvny s a ui' ui csomponti
elmozdulsok segtsg-vel fogjuk kzelteni
ue(c;)=!_(i-c;)ui +!_(i+c;)ui =[!_(1-c;) !_(l+c;)J[ui]=He(c;)qe.
(7.2) 2 2 2 2 u1 =
Az elmozduls ismeretben az alakvltozs elllthat a lncszably
alkalmazsval
(7.3)
ahol az els tag q szerinti derivlsa (7 .2) behelyettestse utn
vgrehajthat, a msodik tag kzvetlenl nem, de az inverze (7 .l)
ismeretben kpezhet
dx(c;) x1 -xi L --=--=-dc; 2 2
(7.4)
Ezutn visszahelyettestve (7.2)-t s (7.4) reciprokt (7.3)-ba azt
kapjuk, hogy
(7.5)
Az alakvltozs ismeretben a feszltsg az egyszer Hooke-trvny
alapjn szmthat
(7.6)
50
Clunk, hogy ellltsuk az elem potencilis energijt
(7.7)
ahol az els integrlbl szrmaztathat az elem merevsgi mtrixa, a
msodikbl az elem tehervektora. Az integrlst most nem x szerint
hanem q szerint hajtjuk vgre. A dx elll-tshoz felhasznljuk (7 .4
)-et
A merevsgi mtrix ellltsa:
ahol
AE] [AE -- -2L dc;= L AE AE
- --
2L L
_A:]. AE L
Konstans megoszl terhelst felttelezve a tehervektor
szrmaztatsa
L
Jue fxdx = [ui o
ahol az egyes elemek integrljai
51
(7.8)
(7.9)
(7.10)
(7.11)
-
Vgl az elem teljes potencilis energija
AE] [fxL] -A: [:;] [u; ui] + , (7.12)
amely a 2. fejezetbeli (6.10) alakkal egyezik meg. gy a tovbbi
lpsek az alkalmazs tekinte-tben azonosan hajthatk vgre, mint a 5.
fejezetben. Ezrt a megolds tovbbi lpseit itt mr nem ismteljk meg. 7
.2. ltalnostott skfeszltsgi llapot
Az ltalnostott skfeszltsgi llapotot (SF), szoks trcsafeladatnak,
illetve a vgeselem programokban "Plane stress problem"-nak nevezni
[1], [6], [8].
Trcsa: Olyan test amelynek egyik mrete lnyegesen kisebb mint a
msik kett, rtelemzhet kzpsk s a terhelsvastagsg menti eredje a
kzpskba esik.
y p
x
18. bra: ltalnostott skfeszltsgi feladat
A trcsa sajt skjban terhelt lemez. A formulkban alkalmazott
feszltsgek valjban a b falvastagsg mentn kpezett tlagrtkek, de ezt
kln nem jelljk.
A feszltsgi tenzor s a fiiggetlen elemeibl kpzett feszltsgi
vektor:
(7.13)
Hasonl alakot lt az alakvltozsi tenzor s a fiiggetlen elemekbl
kpzett alakvltozsi vektor:
l o &x 2Yxy l [8, l A= 2Yyx &y o ~= &)' . (7.14) o o
&z Y.w
52
Az alakvltozsi vektorban &z mennyisget azrt nem tntettk fel,
mert feszltsgi prja a-z =O, s gy az alakvltozsi energiban nemjtszik
szerepet. A feladat jellemzje, hogy a vgeselem hl csompontjaiban
csak x,y irny ui, vi elmoz-
duls ismeretlen paramterekrl beszlnk, valamint ennek megfelel
F:i,Fyi erk mkdtethetk.
7 .3. Sk alakvltozsi llapot Az ltalnostott sk alakvltozsi llapot
(SA) kifejezst a vgeselem programokban "Plane
strain problem"-nak nevezik [1], [6], [8]. Skalakvltozsrl
beszlnk, ha a vizsglt testnek van egy kitntetett skja, amellyel
prhu-
zamos valamennyi sk alakvltozsa azonos s a skok tvolsga sem
vltozik.
y
x
19 bra: Egy folymentn ptett gt keresztmetszete
Felttelezseink szerint a keresztmetszeti skjra merlegesen
vgtelen hossznak tekintett test brmelyik keresztmetszetben
ugyanolyan alakvltozsi s feszltsgi llapot bred. Az ilyen testek
mechanikai modellje egysgnyi vastagsg metszetet. Ebben az esetben
alakvl-tozsi tenzor s a fiiggetlen elemekbl kpzett alakvltozsi
vektor:
l o &x 2Yxy
l [8, l A= 2Yyx &y o ~= :: . (7.15) o o o
Hasonl alakot lt a feszltsgi tenzor s a fiiggetlen elemekbl
kpzett feszltsgi vektor:
(7.16)
A feszltsgi vektorban (J z mennyisget azrt nem tntettk fel, me11
az alakvltozsi ener-giba nemjtszik szerepet, hiszen az alakvltozsi
prja zrus.
53
-
A feladat kitzse hasonl a skfeszltsgi llapothoz, vagyis a
vgeselem hl csompont-jaiban csak x,y irny u;, V; elmozduls
ismeretlen paramterekrl beszlnk, valamint en-nek megfelel P:-;, Fy;
erk mkdtethetk.
7 .4. Tengelyszimmetrikus feladat Forgs vagy tengelyszimmetrikus
llapot kifejezst a vgeselem programokban "Axi-
symmetric problem"-nak nevezik [l], [6], [8].
r
20. bra: Egy csavar tengelyszimmetrikus terhelse s modellje
A forgsszimmetrikus test geometrija s terhelse is
forgsszimmetrikus, brmelyik meri-din metszetben ugyan olyan
alakvltozsi s feszltsgi llapot bred. Ebben az esetben az
alakvltozsi tenzor s a fiiggetlen elemekbl kpzett alakvltozsi
vektor:
o l
e, l &r 2 r/Z A= o &rp o E= &rp (7.17) l &z 2Yzr
o &z Yrz
Hasonl alakot lt a feszltsgi tenzor s a fiiggetlen elemekbl
kpzett feszltsgi vektor:
[(}r] (}rp
O'= .
~ ;~ (7.18)
A feladat megadsa a skfeszltsgi s skalakvltozsi llapottal
megegyezik, vagyis a vgeselem hl csompontjaiban csak r,z irny u;,
wi elmozduls ismeretlen paramterek-rl beszlnk, valamint ennek
megfelel F;.;, Fzi erk mkdtethetk. A vgeselem progra-mokban ltalban
az r koordintnak az x koordinta felel meg.
54
A hrom feladat vgeselemes vizsglata azrt nagyon hasonl, mert a
csomponti elmozdu-lsnak csak skba es koordintja fordul el. A
tovbbiakban rszletesen csak a skfeszltsgi llapot vgeselemes ellltst
rszletezzk
7 .5. Skfeszltsg peremrtkfeladat Rugalmas SF peremrtk feladat
kitzse a 21. brn lthat [l], [6], [8].
x
21. bra: 2D-s skfeszltsgi llapot feladat
Az elmozdulsmez a helynek ismeretlen fiiggvnyi:
* (r) =u( x, y fex +v( x, y )ey, u =[u (x, y)] , = v(x,y)
ahol a fels indexben a * most a feladat skbeli jellegre utal. A
vastagsg menti tlagos alakvltozsok skbeli rsze
A * l ( -* n* n* -*) =- u o v +v ou = 2 '
(7.19)
(7 .20)
ahol v* =~ex +~eY a skbeli nabla opertor, s a fel nem tntetett
skra merleges tla-ox ay
v( & +& ) gos fajlagos nyls &z = x Y kplettel
szmthat.
1-v Az tlagos feszltsgek tenzora (Hooke-trvny) s fiiggetlen
elemeinek oszlop vektora:
F =2G A + I , * ( * V (&x + & y ) * J = = 1-v =
(7 .21)
55
-
Az anyagtrvny mtrixos fonnban is felrhat
Az egyenslyi egyenlet:
ahol g* a gyorsuls vektor (pl. gravitci, forgs, stb.).
Kinematikai peremfelttel:
-*(-*) -*(-*) u r =u0 r Dinamikai peremfelttel:
F * -* -* =n =p
o o
1-v (7 .22)
(7 .23)
(7 .24)
(7 .25)
A skbeli feladat sszesen 8 ismeretlen mezt tartalmaz, ezek
egyrtelm meghatrozshoz 8 skalr egyenlet (rszben parcilis
differencilegyenlet) s a megfelel peremfelttelek llnak
rendelkezsre. Azt a megoldst, amely (7 .19)-(7 .25)-nek eleget
tesz, analitikus megoldsnak, egzakt megoldsnak vagy tnyleges
megoldsnak nevezzk.
Termszetesen a most is kzelt megoldst keresnk a potencilis
energia minimum elv felhasznlsval.
A bevezetett mennyisgekkel a rugalmas skbeli feladatra a teljes
potencilis energia az albbi alakban rhat
J] P ~) ~ f~TQ~V- ( P! dV- f ~T!! dA. V V AP
(7.26)
V geselem-mdszer alkalmazsakor az elemekre bontott tartomnyokon
loklisan approximlt elmozdulssal fejezzk ki a potencilis
energit
(7 .27)
ahol N elem az elemek szma, II; (u e) az elemenknti
approximcival kifejezett potencilis energia
f ~eT ~e dA. (7.28) A;,
56
Vgl a potencilis energia minimum elvbl hatrozhat meg az
elmozdulsmez ismeretlen paramterei (csomponti elmozdulsok). 7 .6.
ltalnostott skfeszltsg lineris izoparametrikus vgeselem
A kvetkezkben bemutatjuk egy elem potencilis energijnak az
ellltst, azaz a me-revsgi mtrix s tehervektor szrmaztatst
A hzott-nyomott izoparametrikus rdelemnl lttuk, hogy az elemhez
illeszkeden egy r; termszetes koordinta tengelyt rendeltnk. Skbeli
esetben most az elmhez egy loklis r;J17 termszetes
koordintarendszert ktnk. A r;J17 loklis- s a xJy globlis
koordintarendszer pontjai kztt kapcsolatot a lekpzs teremti
meg.
~' 17 4 +l 3
lekpzs ~( c;J17)
-l +l ..
".
r;
l -l 2
x
22. bra: A globlis xJy s a termszetes r;J17 loklis
koordintarendszer kztti lekpzs
A lekpzs alkalmazsnak elnye elssorban abban jelentkezik, hogy a
r;J17 termszetes koordintarendszerbeli integrlsra ltezik knnyen
programozhat numerikus algoritmus.
A geometria lekpzse:
ahol az alakfggvnyek
4
x( r;J17) =L hi ( r;,17 )xi i=l
l hl ( c;J11) =4 u- r;)( 1-11),
l h 3 (r; J 17) = - (l + r;) (l+ 17) ' 4
Az elmozduls kzeltse:
4
y (r; J 17) = L hi (r; J 17) Y i ' i=l
l h 2 (r; J 17) = - (l + r;) (l -17) '
4 l
h4 ( c;J17) = -( 1- r;)( l+ 17). 4
(7.29)
Az izoparametrikus elnevezsbl kvetkezen ugyanazokat az
alakfggvnyeket alkalmaz-zuk az elmozdulsi mez kzeltsre is mint a
geometria lekpzsre
4 4
u( r;J17) =L hi ( r;J17 )ui , v( r;J17) =L hi ( r;J17 )vi .
(7.30) i=l i=l
57
-
A (7 .30) approximci felrhat mtrixos alakban is ui VI
u 2
!((~J77)= =[~ o h 2 o hJ o h 4 ~] v 2 hl o h 2 o hJ o UJ (7 .31)
v J u 4
v 4
A hi alakfggvnyeket szoks interpolcis fggvnyeknek is nevezni,
szemlehetsket axonometrikus brn mutatjuk meg. Az alakfggvnyek
lineris approximci esetn n. egyenes felletek, azaz nyereg
felletek.
23. bra: Az alakfggvnyek
4
2 4. bra: Az u (~J 77) = L hi (~J 77) ui kzelt elmozduls
szemlltetse i=l
Az alakvltozsi jellemzk szmtsa:
au a x av ay
au av -+-ay ax
58
(7.32)
Felrhatjuk (7 .32)-et 111trixos alakban is: Ul VI
[h" o h 2 x o hJ x o h 4 x o l u 2
~e=~( ~J 77)!(= O hl y o h2y o hJ y o h 4 y v 2 hl y hl x h2y h
2 x hJ y hJ x h 4 y h 4 x
UJ v J
(7.33)
u 4
v 4
ahol !!e az gynevezett elmozduls-alakvltozsi mtrix s hixJhiy a
hi alakfggvnyek xJy szerinti derivltjai.
Lthatjuk, hogy (7 .32) s (7.33)-ben az alakfggvnyek xJy szerinti
derivltjai szerepeinek Ez a derivls a lncszably alkalmazsval
valsthat meg
(7.34)
Kzvetlenl a Jacobi mtrix inverzenem llthat el, de a Jacobi mtrix
igen:
_1 ( ) _adJ(!) J ~J 77 - ll . = det J
(7.36)
A Jacobi mtrix determinnsa igen fontos szerepet jtszik az elem
lekpzsnek ellenrzse sorn is, ha az rtke zrus, akkor a lekpzs
szingulris. Ha a gyakorlati szmts sorn azt rzkeljk, hogy a
Jacobi-fle determinns eljelet vlt a klnbz pontokban, akkor az elem
nagyon eltorzult alak s az eredmny nem megbzhat. Ilyen esetben a
vgeselem felosztst gy kell mdostani, hogy ez ne forduljon el.
A feszltsg szrmaztatsa:
(~J77)= (7.37) Az elem (7 .28) teljes potencilis energija az
alakvltozsi energibl s a kls erk poten-
ciljbl (vagy klserk munkjbl) ll.
59
-
Alakvltozsi energia :
Az integrlban a dV elemi trfogat a b az elem a trcsa vastagsga.
A dxdy felleti elem jvltozra trtn ttrse miatt az elemi trfogatban
megjelenik a Jacobi determinns is: dV= bdxdy bdeti~Jdc;dry. A
trfogati er munkja:
l l
f ~eT pf dV =9:eT fHeT p~ebdxdy = 9:eT f fHeT pfbdetl~ldc;dry.
V" - - A" - - -1-1 -
(7 .39)
A felleten megoszl terhels munkja:
x
25. bra: Megoszl terhels az elem oldalln
A 25. brn az elemi vhossz ds=~( dx)2 +( dy)' = (~J+( Z J dl;.
Amunka:
ahol p = [:Y J most csak fiiggleges irny megoszl terhelst
tartalmazza, S34 a hrmas s ngyes csompont kztti oldallet jelli.
A (7.38) s (7.39) felleti integrlokat tartalmaznak a kt egysg l
ngyzet felett, mg (7 .40) csupn egy vonalintegrl a [ -1,+1]
tartomnyon. Mind a kt integrl tpusra alkalmaz-hat az n. Gauss-fle
kvadratra [1].
60
Numerikus integrls (Gauss kvadratra):
a(c;)
26. bra: Az a( c;) folytonos fggvny a [-1,+ l] intervallumon
V onalintegrl:
l NG
Ja(c;)dc;= Ia(c;i)W;, (7 .41) -1 i=1
ahol ~i, w; a Gauss koordintk s a hozzjuk tartoz Gauss slyok, NG
a Gauss-fle integ-rcis pontok szma. Polinomok esetn a kvadratra (2
NG l) fokig pontos rtket szolgl-tat.
l Trblr a azat: G auss k d' r rk r G oor mata es , l k [l] auss
smyo NG ~i w;
l o 2.0 2 -0.57735 02691 89626 1.0
0.57735 02691 89626 1.0 3 -0.77459 66692 41483 0.55555 55555
55555
0.0 0.88888 88888 88888 0.77459 66692 41483 0.55555 55555
55555
Felleti integrl:
l l NG NG
ff P( c;,fd) dc;dry = IIP( ~,JL) W;~. -1-1 i=l j=l l '
(7 .42)
A tovbbiakban alkalmazzuk a (7 .41) s (7 .42) formulkat a
merevsgi mtrix s tehervekto-rok meghatrozsra.
Merevsgi mtrix:
l l J J,!!eT~!fbdetl~ldc;dry -1-1
61
-
Tehervektor a trfogati terhelsbl:
l l NG NG J JHeT Pfbdet~~~d~dry = L~HeT (~i'lJi )Pf (~i,lJj
)bdetl~(~i'lJi )l w;~. (7.44) -1-1 !=l ;=l
Tehervektor a felleti terhelsbl :
r; JHr (q, 77 =I)fb (:;J +(X J J q= ~Hr (q" 77 =!) !!'b (:;J +(X
J w,. (7 .45)
Egy elem teljes potencilis energija:
IJe J eT Ke e eT fe eT fe p 22 =2 -2 =p -2 =p (7 .46)
A szerkezet teljes potencilis energija:
(7 .47)
ahol N elem az elemek szma. A teljes potencilis energia (7 .47)
alakja megegyezik a korbbi (6.22) s (6.45) kifejezsekkel, ez azt
jelenti, hogy a megolds tovbbi lpsei hasonlan hajtandk vgre, amint
azt a hzott nyomott rudaknl tettk. Ez a hasonlsg az alapja a
vgeselem mdszer j programozhatsgnak
7. 7. Egy plda torzult skbeli elem elfajul lekpzsre
~ 2 ry=- .:::_3 ~77
4 ' +l 3
lekpzs
'\
-l "
+l ' "
,.
' '
' 2 l -l 2 ~------------~~--------:~ l x
27. bra: Torzult ngyszg alak elem
Az brn vzolt elem sarokpontjainak koordinti a 2. tblzatban
adottak.
62
2 'bl' A l . ta az at: z e em saro k .. kk d. , ,. pontJama oor
mata1 Csompont x y
l o o 2 4 o 3 l l 4 o 4
Az elem lekpzse:
4 l l l y(~,lJ)= LNi(~,lJ)Yi
=-(1+~)(1+ry)l+-(1-~)(1+ry)4=-(l+ry)(5 3~). ~ 4 4 4 A Jacobi mtrix
(7 .35) alapjn
[
ax a~
i!( ~' 77 ) ax ary
ay l [ (5- 317 ) a~ 4 ay - -3(1+~) ary 4
A lekpzs elfajulv vlik, ha a Jacobi mtrix determinnsa nulla: (5-
3ry) -3(1+77)
det lJ (~,lJ )l 0= 4 4 25-15~-15ry+9~1J 9+ 9~+ 9ry + 9~77 -3(1
+~) (5- 3~) 4 4
4 4 16 -24~ 4-6~-677 O.
4
Az 77 = -~ +l_ egyenes azon pontok mrtani helye, ahol a lekpzs
szingulriss vlik. A 3
lekpzs ilyenkor nem egyrtelm, pl. a tartomny egy rsze a
tartomnyon kvlre kpezrlik le. Az elemnek ez a torzultsga
matematikai s mechanikai szempontbl nem engedhet meg. Az ilyen elem
alakvltozsi energija negatv is lehet, ami fizikailag
elkpzelhetetlen. Egy elem hasonl torzultsga esetn, a vgeselem
programrendszerek "Negative Jacobian" hiba-zenetet rnak ki a
kpemyre.
63
-
FELADATOK VIZSGLATA VGESELEM MDSZERREL
A vizsglatainkat ismt 1D-s esetre mutatjuk be. A 3. fejezetben
ismertetett szilrdsgtani peremrtk feladatot ( l.b. bra) gy bvtjk
ki, hogy figyelembe vesszk a tmegerket s az erhatsok idbeli lefutst
is. gy egy idben lejtszd dinamikai feladatot kapunk, amely egyben
kezdeti- s peremrtk feladat is. A kezdeti s peremrtk feladatot
vegyes feladatnak szoks nevezni.
/,(t)
28. bra: Hzott-nyomott rd dinamikai feladata
A (4.3) egyenslyi egyenlet jobboldaln az impulzus ttel alapjn
megjelenik az inercia er is. A tbbi egyenlet oly mdon ismtldik meg,
hogy az idtl fggs megjelenik mindegyik-ben.
8.1. Ers megfogalmazs
Kinematikai (geometriai) egyenlet:
O
-
/,(t)
29. bra: A rdszerkezet Vgeselemes felosztsa
Az e sorszm hzott-nyomott rdelemen (6.6) nyomn az elmozduls
approximci
(8.13)
s a gyorsuls is hasonlan rhat fel
(8.14)
A csomponti elmozdulsok varicija azonban nem fgg az idtl
(8.15)
Az elem merevsgi mtrixa:
(8.16)
[
AE =[u. 5u.J L
'
1 AE L
Az elem tehervektora:
suJ[(Jf n]f.(t)d~ lx (t)L L L 2 fu f,. (t)d~ f[ui [ui 5uj] = ~eT
!: (t). (8.17) lx (t)L
2
66
Az elem tmegmtrixa:
L L
fu(~)Ap(~,t)d~= J [ui o o
(8.18)
Egy sszetett szerkezetnl, mint a teljes potencilis energinl
sszegezni kell a megfelel mennyisgeket. A szerkezetre nzve el kell
lltani a merevsgi mtrixot, a tmegmtrixot s a tehervektort, azaz
(8.1 O) trhat diszkretizlt alakban:
(8.19)
A megfelel kinematikai peremfelttelek figyelembevtele utn a
tetszleges varicibl kvetkezen megkapjuk a mozgsegyenletet.
A diszkretizlt mozgsegyenlet:
(8.20)
azaz
[2ApL ApL] [2AE _AE] r Lfx(t) J A:L A~L [:} _ ~ ~ [::] Lf~(t)
+F.(t) . (8.21)
8.4. llandsult harmonikus gerjesztett rezgs
30. bra: A rdszerkezet harmonikus gerjesztse
A 30. brn vzolt szerkezet idben llandsult harmonikus terhelsnek
van kitve. Ezrt a (8 .20) egyenlet jobboldaln a gerjeszt er is egy
idben harmonikusan vltoz fiiggvny lesz
! (t) = !o cos mt . (8.22)
67
-
Felttelezzk, hogy a (8.20) mozgsegyenlet megoldsnak homogn rsze
a valsgban mindig jelenlv csillapts kvetkeztben lecseng. A (8.20)
mozgsegyenlet partikulris megoldst a (8.22) zavar fiiggvny alakjban
keressk [5]
q (t) q cos Jt. = =0
Az elmozdulst idszerint ktszer clerivlva a gyorsuls:
q (t) -(1)2 q cos Jt . = =O
Visszahelyettestve (8.22)-(8.24)-et (8.20)-ba -m
2 Mq cos mt + Kq cos mt = f cos mt , -=o ==o =O
majd trendezs utn kapjuk, hogy
( K m2 M) !!a cos mt !a cos Jt .
(8.23)
(8 .24)
(8 .25)
(8 .26)
A cos mt diszkrt pontok kivtelvel klnbzik zrustl, ezrt
egyszersthetnk vele s egy lineris algebrai egyenletrendszert kapunk
a q elmozduls amplitdra
=0
(8 .27)
ahol az egytthat mtrixot ( K - m2 M) K D szoks dinamikai
merevsgi mtrixnak is ne-vezni.
Az elmozduls amplitd nem csak a getjeszt er amplitdjtl, hanem a
gerjeszts OJ krfrekvencijtl is fiigg
(8 .28)
A ( K- m2 M) = K D mtrix szingulriss vlik, ha az J krfrekvencia
megegyezik vala-mely a; (i= 1,2, ... ) sajtkrfrekvencival. Ezt az
esetet rezonancinak nevezzk, ekkor a q0 amplitd vektor koordinti a
vgtelenhez tartanak.
A (8 .27) diszkretizlt alakja
(8 .29)
68
A kijellt mveleteket elvgezve
(8.30)
a megolds (8 .28) figyelembevtelvel felrhat
(8.31)
vgl a keresett csomponti elmozdulsok amplitdi
(8.32)
(8.33)
Ha (8.32) s (8,33) kpletekbe co= O helyettestssei lnk, akkor a
statikai feladat megol-dst kapjuk eredmnyl. A nevez mindkt kpletben
a rezonancia frekvencin vlik null-v, amikor a gerjeszts
krfrekvencija valamelyik sajtkrfrekvencival esik egybe. 8.5.
Szabadrezgsek,sajtrezgsek
Tekintsnk el a (8.20) mozgsegyenletet jobboldaln lv gerjeszt
erhatstl M~+K!!=Q, (8 .34)
az gy kapott homogn differencilegyenlet megoldst idben
harmonikusan vltoz filgg-vny alakjban keressk [1], [5]
(8.35)
69
-
A megoldst id szerint ktszer clerivlva
~(t)= -a2 !cos at. (8.36) Visszahelyettestve (8.35)-(8.36)
kpleteket (8.34)-be
-a 2 M cos at= Q, (8 .37) -= -= -
trendezs utn azt kapjuk, hogy (8.38)
A cos at diszkrt idpontok kivtelvel klnbzik zrustl ezrt
egyszersthetnk vele, vagyis egy lineris homogn algebrai
egyenletrendszert kapunk a q> elmozduls amplitdra
(8 .39)
A (8.39) homogn lineris algebrai egyenletrendszer egy
sajtrtkfeladat, ahol az a n. sajtkrfrekvencia nem ismert. A homogn
lineris algebrai egyenletrendszemek akkor van trivilistl klnbz
megoldsa, ha az egytthat mtrix determinnsa zrus
(8 .40)
A (8.40)-ben kifejtett determinns a 2 -re nzve egy n -ed fok
polinomat ad, amelyet karak-terisztikus polinomnak nevezzk ( K s M
mrete egyarnt (n x n) ). Bizonythat, hogy (8.40) gykei valsak s ai2
?:. O (i= 1, ... ,n). Vgl (8.39) s (8.40) megoldsai n szm
sajtrtkprt szolgltatnak
(aJ , i az i -edik a/ sajtkrfrekvencia ngyzethez tartoz
sajtvektor. A sajtrtk felada-tot gyakran az albbi alakban szoks
felrni
Kq> =a/Mq>. -=i -=i
A gyakorlatban azrt is fontos a sajtkrfrekvencia ismerete, mert
ezen a frekvencin ger-jesztve a rezgrendszert az elmozduls amplitd
rendkvl megn, csillapts mentes esetben elvileg tart a vgtelenbe. A
sajtvektor vagy ms nven rezgskp ismerete segti a tervezt abban,
hogy esetleges szerkezeti mdostsokat alkalmazva, a rendszer
eredmnyesen elhan-golhat legyen egy nem kvnt sajtfrekvencirl.
A (8 .39) egyenlet diszkretizlt alakja az eredeti terheletlen
szerkezetre is felrhat
[[
2 AE AE] [2ApL ApL]] ): -A: -a' A:L A~L [::] [a (8 .41)
70
A fenti gondolatmenetet kvetve a (8 .40) alatti karakterisztikus
polinom
(_A: _a' A: L J (A: -a' A;LJ
egy a 2 -ben msodfok algebrai egyenlet, amelynek gykei
felrhatk
5A2Ep + (5A2Ep)2
4 7A2p 2L2 A2E2
3 - 3 36 L2
(a~M)I2=------~~---7-A-2~p~2~L~2------------2-_:._-
36
30-1812 E 7 pL2 '
30+1812 E 7 pL2 .
(8 .42)
(8 .43)
Az a~EM.i sajtkrfrekvencia ngyzetek rtke a keresztmetszettl nem,
hanem csak a rd hossztl fiiggnek (a VEM als indexjelentse "vgeselem
mdszer"). Termszetesen a sajt-frekvencia rtke vgeselemes szmtsoknl
fiigghet a feloszts srsgtl s az approxim-ci foktl is.
A rudak kontinuum rezgsinek megoldsbl ismeretes [3], hogy az
egyik vgn befogott plizmatikus rd longitudinlis rezgseinek
sajtfrekvencija
a~h.i =ft(; +(i-I}ff} (i= 1,2, .... ), ahol l= 2 L, gy az els kt
sajtkrfrekvencia ngyzete a feladatunkra vonatkoztatva
2 a egzakt ,J 2 aegzakt,2
(8 .44)
(8 .45)
A (8.43) s (8 .45) megoldsokat sszehasonltva megllapthatjuk,
hogy mind a kt kzelt vgeselmes sajtkrfrekvencia fellrl kzelti az
egzakt rtkeket
2 < 2 aegzakt,i - aVEM,i' (i= 1,2). (8 .46)
A vgeselem mdszerrel meghatrozott els sajtkrfrekvencia ngyzete
lnyegesen ponto-sabb (az eltrs csupn 5,2% ), mint a msodik
sajtkrfrekvencia ngyzete (az eltrs 42,7%).
71
-
HFESZLTSGEK SZMTSA Ha egy test htgulst nem korltozzuk, akkor a
konstans vagy a hely lineris fggvnye
szerinti hmrsklet eloszlsbl nem szrmazik hfeszltsg. Ellenkez
esetben, ha egy test htgulst korltozzuk, akkor a testben feszltsg
bred mg konstans hmrsklet eloszls esetn is.
Az megllaptsbl kvetkezik, hogy a feszltsg szmtsnl figyelembe
kell venni a htguls okozta alakvltozst is.
9.1. Hmrsklet hatsnak vizsglatalD-s feladatnl
Fx ~--~----~~--~~~~~----~--~x+
31. bra: A tart teljes hosszban egyenletes iJT hmrsklet
vltozsnak van kitve
A 31. brn vzolt feladatot vizsgljuk egyenletes !1T hmrsklet
nvekeds mellett. H-zott nyomott rudak esetn a htgulssal mdostott
egyszerstett Hooke-trvny [8]:
(9.1)
ahol a a fajlagos lineris htgulsi egytthat. Megszorozva (9 .l)
mindkt oldalt a rd A keresztmetszetvel kapjuk a rderre vonatkoz
anyagtrvnyt
N(x) =AE[ c,(x)-aAT] =AE( d:~x) -aAT} (9.2) Az (9.1) s (9.2)
kpletekben a tnyleges alakvltozsbl levontuk a htguls okozta
fajla-
gos nylst, ezrt az e elem teljes potencilis energijnak felrsnl
is hasonlan jrunk el
e J x du e J (d e } L II (u u ) =- - aiJT AE du;: - aiJT ; - Jue
!,.d;, p i' j 2 o d; '=' _, (9.3)
elvgezve a kijellt szorzst
n;(u,,uj)=i A~; JAE( ~;r~- fu' M~-R~; JAE aATd~ IL
+- fAE ( aL1T)2 d;. 20
(9.4)
Az utols tag (9.4)-ben nem fgg az u elmozdulstl, gy az a
varicikpzs szempontj-bl konstansnak tekinthet, vagyis a varicija
nulla, ezrt a tovbbiakban el is hagyjuk
72
Ile (u. u.)=!_ Lr( due J AE (due \.,;: Lfue ~"_d;:- Lr( due J AE
aiJTd; (9.5) p
11 J 2 Jl d; d;['=' 0 Jx '=' Jl d; '
A 6. fejezetben ismertetett potencilis energia most egy plusz
taggal bvlt, ebbl a tagbl a vgeselemre nzve egy n. hteherhelsi
vektor szrmaztathat.
Az elmozduls (6. 7) alatti derivhja a kvetkez mdon szmolhat
due(;)=[u. u.J[~] (9.6) d; l J !_ L
Ezt behelyettestve (9.5) utols integrljba s elvgezve a kijellt
mveletet megkapjuk a h tehervektort:
{-ll L due L L -AEaL1T ~rt-JAEaiJTd;=[u. u.J AEaiJTd;=[ui uiJ[
J. (9.7) t l d; 1 J 0 l AE aiJT L
Vgl is az elem ( 6.17) potencilis energia kiss mdosul a terhelsi
vektor vonatkozsban
(9.8)
A kt elemre bontott szerkezet (6.21) teljes potencilis energija
hasonlan csak a tehervek-tor vonatkozsban mdosul
(9.9)
A szerkezet (9.9) teljes potencilis energija a csomponti
elmozdulsi paramterek ktvl-tozs fggvnye. A potencilis energia
minimum elv rtelmben keressk ennek a tbbvlto-zs fggvnynek a
minimumt. A minimum ltezsnek szksges felttele:
(9.10)
Hasonlan a (6.26) s (6.27) egyenletekhez
K!! =!, (9.11)
73
-
azaz
[
2 AE _ AE]lu2 ] [ fxL l - ~ A: u3 = f;L +F; +AEaJT . (9.12)
Ez a lineris algebrai egyenletrendszer kt egyenletet s kt
ismeretlent tartalmaz, amely megoldhat a csomponti elmozduls
paramterekre
3fx~ FL f~ 2U u =--x--+--' -+LaiJT u =2--' -+--x-+2LaiJT. 2 2 AE
AE ' 3 AE AE
(9.13)
A csomponti elmozdulsok rtkei a htgulsbl addan egy kiss
megvltoztak Ha a kls terhelstl eltekintennk, akkor a csomponti
elmozdulsok a htgulsbl szrmazn-nak, amelyeket az elmlet ennl a
feladatnl pontosan vesz figyelembe. Tekintettel (9.2)-re, a
rderket ez az elmozduls mdosuls termszetesen nem vltoztatja
meg.
9.2. Hmrsklet hatsnak vizsglata SF feladatoknl Az lD-s
feladathoz hasonlan mdosul a (7.22) Hooke-trvny, az SF feladatoknl
is a
fajlagos nylsokbl le kell vonni a htguls okozta fajlagos nylst
[l], [8]:
l v o e (j D(Ee -E ) =_!!_ V J 0
= = =o J-v2 [[&x le laiJTJ] &Y - aiJT ,
J-v o o r.'o/ o 2
Az elem (7 .28) potencilis energijt is hasonlan mdostjuk
Jle(ue)=~ f(EeT ET)D(Ee -E )dV p = 2 V" = =O = =O f eT edV f eT
ed' A !! pg - !! p .11 ' - - - -V" - A;, -
a kijellt szorzst elvgezve
n;()=-21 s~eT~~edV- s~eT PfdV V" V"
f ~eT !!e dA- f ~eT~~odV + ~ f ~~~~odV ' A;, V" ve
(9.9)
(9.10)
(9 .ll)
az utols integrlmost is fggetlen az elmozdulstl, ezrt a
varicikpzs szempontjbl ez a konstansnak tekinthet s el is
hagyjuk
(9.12)
Az (9.12) utols integrljbl felhasznlva (7.39)-et a h tehervektor
szrmaztathat l l
f=EeT=D=E0dV eT fBeT (c;, )DE bdxd !! = r; ==0 y ~eT f f~eT (
c;,r;) ~~idetl~ldc;dr; = - -1-1 V" V"
74
ahol f~ az elem h tehervektora, numerikusana Gauss kvadratrval
szmolhat ki. l l NG NG
r:= f f~eT(c;,r;)~Eabdetl~ldc;dr;
LL~T(c;i,r;j)~~o(c;i,r;j)bdetl~(c;i,r;JI~~ ~~ ~j~
A htgulsbl szrmaz fajlagos nyls is lehet a hely fggvnye, ha a
hmrsklet fgg a helytl.
A vgeselem mdszer tovbbi lpsei a csomponti elmozdulsok s
feszltsgek meghat-rozsa cljbl a korbban lertak szerint hajthat
vgre.
Egy elem teljes potencilis energija:
Jle-~ eTKe e_ eTfe eTfe eTfe p - 2!! = q !! =p !! =p -!! =a
(9.13)
A szerkezet teljes potencilis energija: Ne/em J ( )
Il = L ne =-qTK q - __ qT !p +!p +!a ' p e~l p 2= = =
(9.14)
ahol Nelem az elemek szma. A teljes potencilis energia (7.14)
alakja formlisan megegye-zik a korbbi (6.22) s (6.45)
kifejezsekkel, ez azt jelenti, hogy a megolds tovbbi lpsei hasonlan
hajtandk vgre, amint azt a hzott nyomott rudaknl tettk.
75
-
I-DEAS PROGRAMRENDSZER HASZNLATA Az I-DEAS programrendszer az
elmlt vekben folyamatos fejlesztsen s vltozson ment
keresztl, de az jabb verzik felhasznli fellete lnyegben
vltozatlan maradt. Ez id alatt a szaftvert forgalmaz cgnl
tulajdonos vltsok is trtntek, ami tbbszri nv mdosulssal jrt egytt.
Az SZE Alkalmazott Mechanika Tanszke jelenleg az NX IdeasS
verzijnak hasznlatra jogosult. Ezt a fejezetet a NX IdeasS
Help(sg)- rendszernek tartalma, illetve [2] irodalom alapjn
lltottuk ssze.
Az I-DEAS tervez rendszer olyan ltalnos cl gpszeti CAD/CAM
rendszer, melyet a mmki tervezsi folyamat megknnytsre, felgyorstsra
alkalmazhatunk. Minden egyes mmki feladat elvgzse, ms-ms szaftver
modul elindtst teszi szksgess. A program elindtsa utn tbb ablakot
nyit meg, melyek kzl a jobb szls mensora alatt tallhatjuk meg a
klnbz alkalmazsok kivlasztst engedlyez lista ablakot.
Ezek a Design, Simulation, Test, Manufacturing, stb. Pldul


![TUDOMÁNYOS DIÁKKÖRI DOLGOZAT · A végeselem-módszer kialakulása [1] A mérnöki gyakorlatban jelentkező szerkezetek nagy része rugalmas anyagból készül, s a terhelés bizonyos](https://img.pdfslide.tips/doc/110x75/5e484fc81e9333353d794b24/tudomnyos-dikkri-a-vgeselem-mdszer-kialakulsa-1-a-mrnki-gyakorlatban.jpg)


![dr. Kovács Ádám, dr. Szekrényes András, Moharos István, dr. Oldal István - Végeselem-módszer [2011]](https://img.pdfslide.tips/doc/110x75/55cf9ba1550346d033a6c7d4/dr-kovacs-adam-dr-szekrenyes-andras-moharos-istvan-dr-oldal-istvan.jpg)