Embed Size (px)
Citation preview
- 1 -
JARI Research Journal (2019.10)
自動バレーパーキングの開発と実証実験について Development of an Automated Valet Parking System and a Field Operational Test
野村 徹也*1
Tetsuya NOMURA
谷 川 浩*1
Hiroshi TANIGAWA
1. はじめに
自動運転の実用化には交通事故低減,渋滞削減,
高齢社会の公共交通手段の確保,物流も含めた交
通社会の革命的な進化など大きな期待がある.国
を挙げて早期実用化に向けた様々な取り組みが行
われる中,一般財団法人日本自動車研究所(以下、
JARI という)では 2016 年度から自動バレーパー
キング(以下、AVP という)システムの開発事業を
受託 1)し,AVP システムの開発を進め,2018 年
11月 13日~15日の 3日間にわたり東京・台場の
商業施設の一般駐車場において AVP 機能実証実
験を公開した.
本稿では,AVPシステムの開発内容,機能実証
実験の概要,国際標準化の状況について示す.
2. 自動運転の実用化に向けた取り組み動向
警察庁交通局の報告によれば,2018年の交通事
故死者数は 3,532 人(前年比-162 人,-4.4%),最
新の「令和元年上半期における交通死亡事故の発
生状況等 2)」によれば 1,418 人(前年上半期 1,568
人)となり,交通事故死者数は減少傾向である.そ
の内訳としては,歩行中または自転車乗車中の死
者が約半数を占め,高齢者の割合が高くなってい
る.よって,今後の予想される高齢化社会に向け
ては,さらなる改善が望まれる.
一般的に事故原因の 90%以上は人間(認知,判
断,操作)のミスに起因すると言われており,昨今
のコンピュータ,通信,情報処理技術等の飛躍的
な進化を考えると,人間よりも機械に任せた方が
安全になるという期待から,自動運転の実用化が
国を挙げて取り組まれている.
国として自動運転の実用化を推進する最大の目
的は交通事故死者の削減であるが,死亡事故の多
い一般道路での高度な自動運転実用化には難しい
課題が多く一朝一夕には進まない.そこで,経済
産業省と国土交通省が主導する「自動走行ビジネ
ス検討会」において,限定空間(限られた用途や場
所など)での早期実用化に取り組むことを方針に
掲げ,具体的には Fig. 1に示す通り,トラック・
バスの隊列走行,ラストマイル自動走行,駐車場
内での AVP を国家プロジェクトとして推進する
こととなった.
駐車枠内に自動駐車するシステムは既に実用化
されており,駐車場内を低速で走行し,目標地点
まで移動することや障害物を検出して停車するこ
とについては,技術的にとりわけ大きな課題はな
い.
しかし AVPシステムでは,異なるメーカの車両
が,国内外の様々な駐車場において,それぞれ無
人の管制センタからの指示に基き,確実に動作す
ることを保証しなければ成立しない.そのため,
自動車メーカ,サプライヤのみならず,駐車場関
連事業者など業界の関係団体の協力を得ながら,
実用化・標準化シナリオや戦略などを検討し開発
を進めた.
Fig. 1 早期実用化が期待される自動運転機能 3)
JARI Research Journal 20191001
【研究活動紹介】
*1 一般財団法人日本自動車研究所 ITS研究部
- 2 -
JARI Research Journal (2019.10)
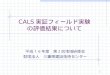
3. ロードマップと普及シナリオ
交通事故死削減目標「2020年までに 2500人以
下」に向けて,2019 年 6 月「官民 ITS 構想ロー
ドマップ 4)」では,物流/移動サービスの実用化
が早く,2020年までに限定地域での無人自動運転
が期待され,またオーナー・カーでは 2025 年を
目処に高速道路でのレベル 4実現が期待されてい
る.
一方,一般車両による AVPは先に述べた通り,
限定空間における「自動運転レベル 4の早期実現」
の位置付けであり,その社会実装に必要な技術や
事業環境などを整備するものである.また,標準
化などの協調領域が広く,事業モデルが存在しな
いため,技術面だけでなく事業面も検討し,2021
年以降の商業運用を目指すとしている.(Fig. 2参
照)
Fig.2 ロードマップ
4. AVP システムの概要
AVPシステムとは,一部の空港や百貨店などで
既に導入されている「人手によるバレーパーキン
グサービス」,すなわち,ユーザの鍵を預かり駐
車場側が人手を使って駐車や出庫を行うサービス
を,自動運転の技術を使って無人で実現するもの
である.
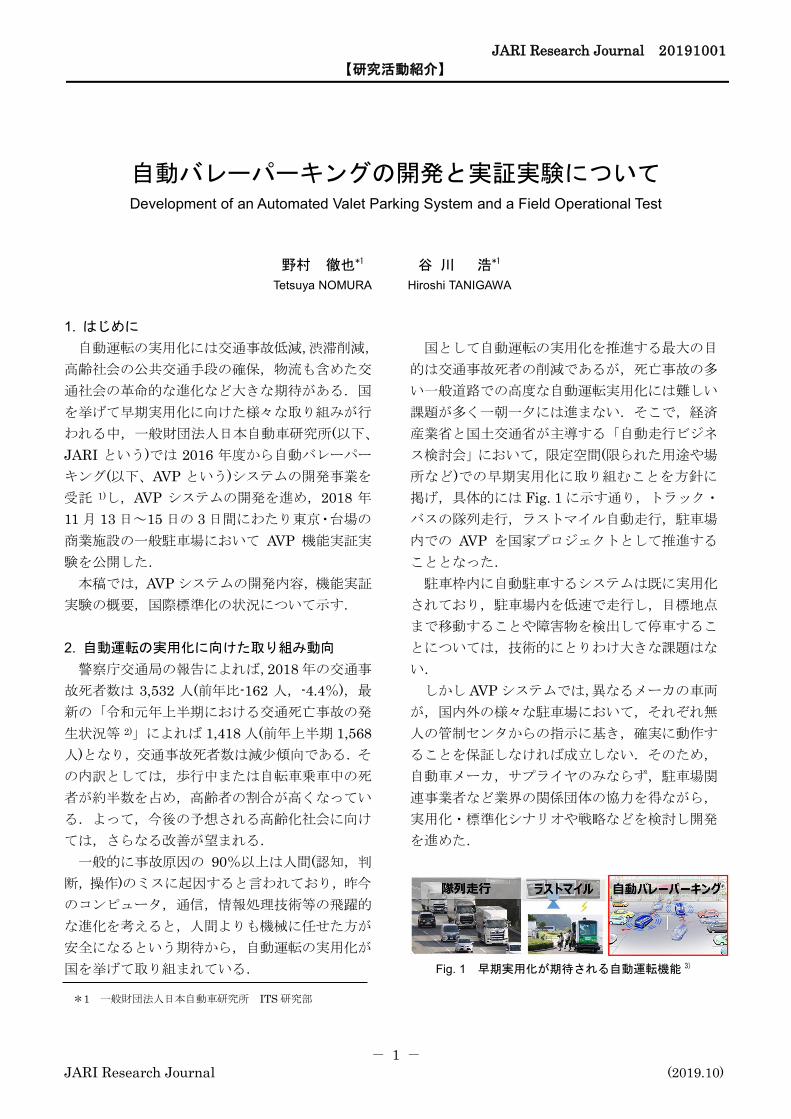
AVPシステムでは,目的の施設にアクセスしや
すい場所で降車し,スマートフォンなどの端末か
ら自動駐車のリクエストを行うと,管制センタか
ら指定される経路で駐車枠まで無人走行・駐車す
る.また同様に,出庫の際も端末からのリクエス
トに応じて乗車場まで自動でクルマが移動するサ
ービスを想定している.(Fig. 3参照)
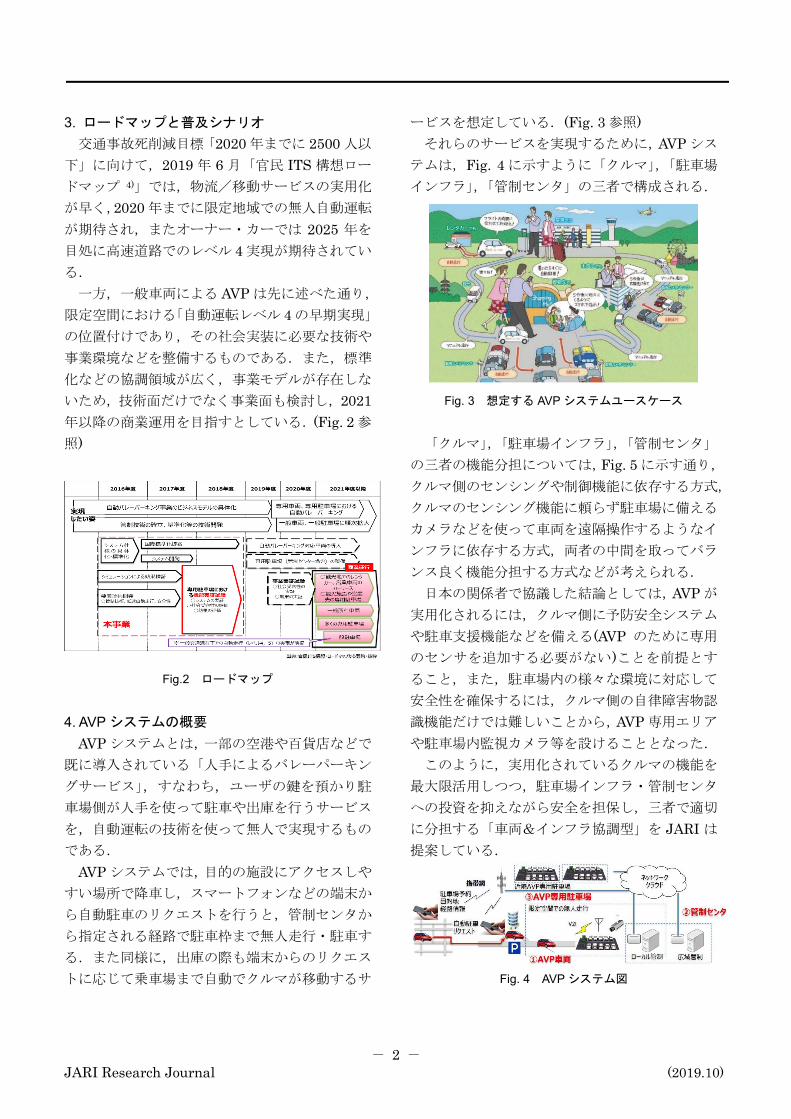
それらのサービスを実現するために,AVPシス
テムは,Fig. 4に示すように「クルマ」,「駐車場
インフラ」,「管制センタ」の三者で構成される.
Fig. 3 想定する AVP システムユースケース
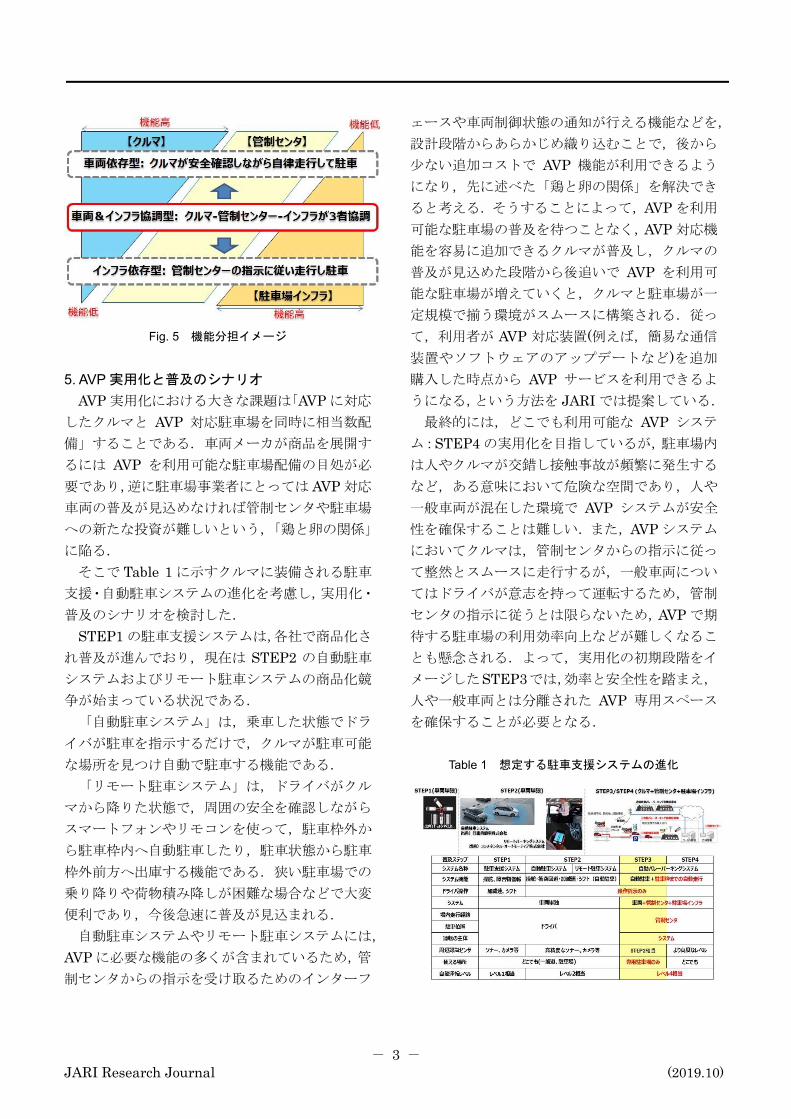
「クルマ」,「駐車場インフラ」,「管制センタ」
の三者の機能分担については,Fig. 5に示す通り,
クルマ側のセンシングや制御機能に依存する方式,
クルマのセンシング機能に頼らず駐車場に備える
カメラなどを使って車両を遠隔操作するようなイ
ンフラに依存する方式,両者の中間を取ってバラ
ンス良く機能分担する方式などが考えられる.
日本の関係者で協議した結論としては,AVPが
実用化されるには,クルマ側に予防安全システム
や駐車支援機能などを備える(AVP のために専用
のセンサを追加する必要がない)ことを前提とす
ること,また,駐車場内の様々な環境に対応して
安全性を確保するには,クルマ側の自律障害物認
識機能だけでは難しいことから,AVP専用エリア
や駐車場内監視カメラ等を設けることとなった.
このように,実用化されているクルマの機能を
最大限活用しつつ,駐車場インフラ・管制センタ
への投資を抑えながら安全を担保し,三者で適切
に分担する「車両&インフラ協調型」を JARI は
提案している.
Fig. 4 AVP システム図
- 3 -
JARI Research Journal (2019.10)
Fig. 5 機能分担イメージ
5. AVP 実用化と普及のシナリオ
AVP実用化における大きな課題は「AVPに対応
したクルマと AVP 対応駐車場を同時に相当数配
備」することである.車両メーカが商品を展開す
るには AVP を利用可能な駐車場配備の目処が必
要であり,逆に駐車場事業者にとっては AVP対応
車両の普及が見込めなければ管制センタや駐車場
への新たな投資が難しいという,「鶏と卵の関係」
に陥る.
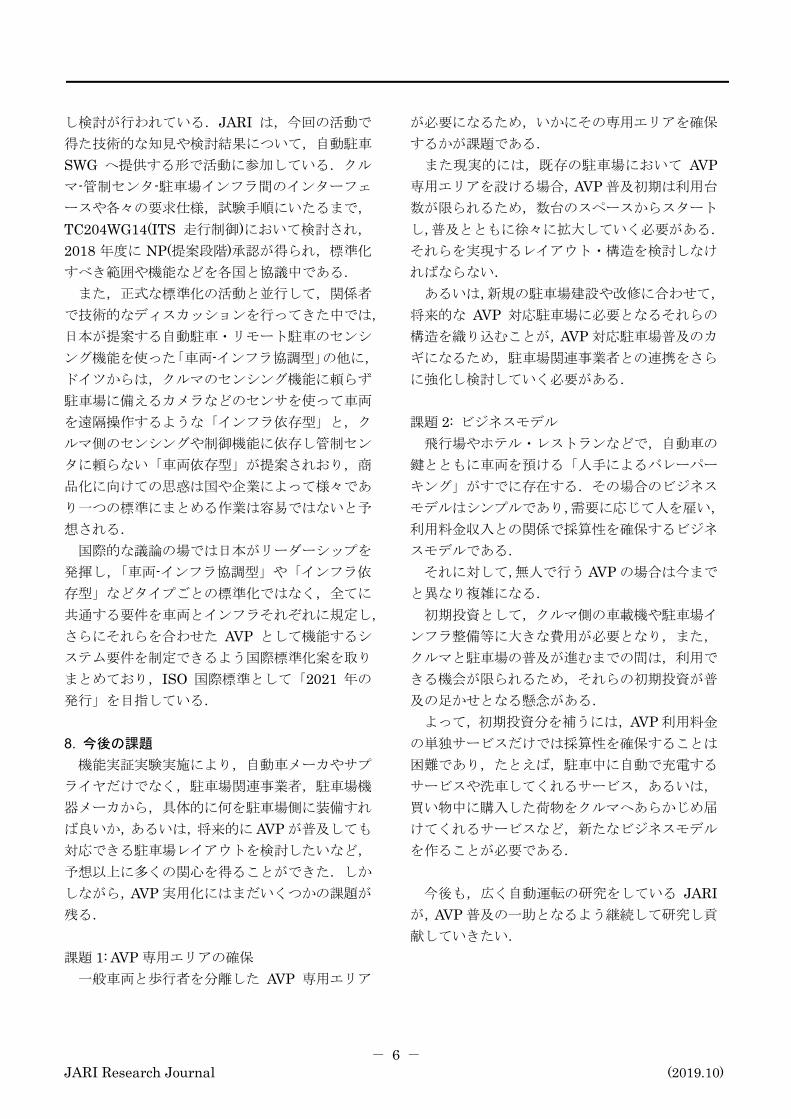
そこで Table 1に示すクルマに装備される駐車
支援・自動駐車システムの進化を考慮し,実用化・
普及のシナリオを検討した.
STEP1の駐車支援システムは,各社で商品化さ
れ普及が進んでおり,現在は STEP2 の自動駐車
システムおよびリモート駐車システムの商品化競
争が始まっている状況である.
「自動駐車システム」は,乗車した状態でドラ
イバが駐車を指示するだけで,クルマが駐車可能
な場所を見つけ自動で駐車する機能である.
「リモート駐車システム」は,ドライバがクル
マから降りた状態で,周囲の安全を確認しながら
スマートフォンやリモコンを使って,駐車枠外か
ら駐車枠内へ自動駐車したり,駐車状態から駐車
枠外前方へ出庫する機能である.狭い駐車場での
乗り降りや荷物積み降しが困難な場合などで大変
便利であり,今後急速に普及が見込まれる.
自動駐車システムやリモート駐車システムには,
AVPに必要な機能の多くが含まれているため,管
制センタからの指示を受け取るためのインターフ
ェースや車両制御状態の通知が行える機能などを,
設計段階からあらかじめ織り込むことで,後から
少ない追加コストで AVP 機能が利用できるよう
になり,先に述べた「鶏と卵の関係」を解決でき
ると考える.そうすることによって,AVPを利用
可能な駐車場の普及を待つことなく,AVP対応機
能を容易に追加できるクルマが普及し,クルマの
普及が見込めた段階から後追いで AVP を利用可
能な駐車場が増えていくと,クルマと駐車場が一
定規模で揃う環境がスムースに構築される.従っ
て,利用者が AVP 対応装置(例えば,簡易な通信
装置やソフトウェアのアップデートなど)を追加
購入した時点から AVP サービスを利用できるよ
うになる,という方法を JARIでは提案している.
最終的には,どこでも利用可能な AVP システ
ム:STEP4の実用化を目指しているが,駐車場内
は人やクルマが交錯し接触事故が頻繁に発生する
など,ある意味において危険な空間であり,人や
一般車両が混在した環境で AVP システムが安全
性を確保することは難しい.また,AVPシステム
においてクルマは,管制センタからの指示に従っ
て整然とスムースに走行するが,一般車両につい
てはドライバが意志を持って運転するため,管制
センタの指示に従うとは限らないため,AVPで期
待する駐車場の利用効率向上などが難しくなるこ
とも懸念される.よって,実用化の初期段階をイ
メージしたSTEP3では,効率と安全性を踏まえ,
人や一般車両とは分離された AVP 専用スペース
を確保することが必要となる.
Table 1 想定する駐車支援システムの進化

- 4 -
JARI Research Journal (2019.10)
6. AVP機能実証実験
2018年 11月 13日~15日の 3日間にわたり東
京・台場の商業施設の一般駐車場で公開した AVP
機能実証実験について述べる.
6.1 実証実験の概要と結果
実証実験は 4台のAVP車両(Fig. 6参照)と 1つ
の管制センタ(Fig. 7 参照)を使って実施した.ま
た AVPのベースとなる最新の自動駐車機能・リモ
ート駐車機能が搭載されたクルマの試乗体験(Fig.
8参照)や,駐車場が抱える様々な課題や利便性・
快適性向上の取り組みに関する展示(Fig. 9,Fig.
10 参照)も行い,駐車場事業者や自動運転関係者
だけでなく,一般の来場者にも「駐車」に係る最
新事情を理解されるよう企画した.
これまで,各社で独自に開発された AVP車両・
システムを用いたデモ走行は世界各所で行われた
が,今回のように,各社それぞれ独自に開発した
4台の車両を一つの管制センタの下で制御し AVP
デモを公開したのは「世界初」の試みであった.
これにり,日本のチームワークと技術力の高さ,
および,実用化するシステムとしての具体性の高
さを証明できた.その結果,メディア 44 社を含
む来場者 1,048名が参加する盛況な公開実験とな
った.(Fig. 11参照)
Fig. 6 AVP 車両
(AVP 車両開発メーカ:前方から順に
三菱電機,トヨタ自動車,JARI,アイシン精機)
Fig. 7 管制センタ制御風景
(管制センタ:デンソーテン)
Fig. 8 自動駐車・リモート駐車機能
(自動駐車:日産自動車,リモート駐車:コンチネンタル)
Fig. 9 展示パネルイメージ「駐車場が抱える様々な課題」
Fig. 10 展示パネルイメージ「駐車場の利便性・快適性向
上の取り組み」

- 5 -
JARI Research Journal (2019.10)
Fig. 11 実証実験会場風景
6.2 AVPシステムの概要
今回の実証実験に用いた AVP システムの概要
を説明する.(Fig. 12参照)
管制センタは,クルマやリモコン・スマートフ
ォン等からの情報を無線ネットワーク(今回は
LTE 使用)を通じて集約し,最適な誘導方法を計
算し,クルマへ移動・停止等の指示を行う.また,
管制センタ(端末)は,ある駐車場内を管理する機
能であり,管制センタ(クラウド)は利用登録情報
の管理や,複数の駐車場や周辺の交通状況等を踏
まえて広域視点で全体最適化を図る機能を持つ.
駐車場インフラは,クルマが自車位置を把握す
るための目印として専用のランドマーク(0.30 m
四方のシート)を,約 2.5 mごとに敷設した.また,
クルマが駐車枠を認識するため既設の白線も使わ
れた.
クルマは各社独自開発のため細かい部分ではそ
れぞれ異なるが,基本的には Fig. 13 に示すよう
に,車載カメラとソナー(超音波センサ)を使って
車両周辺の障害物や駐車枠等を認識し,管制セン
タから指定された駐車位置まで自動走行し,自動
駐車機能を使って認識した駐車枠にクルマを停車
させる機能を備える.また,クルマは自動走行中
に敷設されたランドマークを読み取り,あらかじ
め管制センタから送られているランドマークの位
置情報を使って自己位置補正を行い,管制センタ
から指示された順路を常に正確に走行できる機能
を備える.
Fig. 12 AVP 実証実験システム全体図
Fig. 13 JARI 実験車両の車載センサ
7. 標準化への取り組み
前述したように,各社において独自に開発され
た AVP車両・システムを用いたデモ走行は世界各
所で行われており,世界中での需要が見込まれて
いる.一方,「クルマ,管制センタ,駐車場インフ
ラ」の三者が連携して機能するため,それぞれの
機能・仕様がバラバラになると,クルマ側から見
ると利用できない駐車場が生まれ,駐車場から見
ると受け入れできないクルマが存在することにな
る.そこで,システム全体の国際標準化が大変重
要になる.日本では ISO国際標準化を担当する自
動車技術会が中心となって自動駐車 SWG を開催
- 6 -
JARI Research Journal (2019.10)
し検討が行われている.JARI は,今回の活動で
得た技術的な知見や検討結果について,自動駐車
SWG へ提供する形で活動に参加している.クル
マ-管制センタ-駐車場インフラ間のインターフェ
ースや各々の要求仕様,試験手順にいたるまで,
TC204WG14(ITS 走行制御)において検討され,
2018 年度に NP(提案段階)承認が得られ,標準化
すべき範囲や機能などを各国と協議中である.
また,正式な標準化の活動と並行して,関係者
で技術的なディスカッションを行ってきた中では,
日本が提案する自動駐車・リモート駐車のセンシ
ング機能を使った「車両-インフラ協調型」の他に,
ドイツからは,クルマのセンシング機能に頼らず
駐車場に備えるカメラなどのセンサを使って車両
を遠隔操作するような「インフラ依存型」と,ク
ルマ側のセンシングや制御機能に依存し管制セン
タに頼らない「車両依存型」が提案されおり,商
品化に向けての思惑は国や企業によって様々であ
り一つの標準にまとめる作業は容易ではないと予
想される.
国際的な議論の場では日本がリーダーシップを
発揮し,「車両-インフラ協調型」や「インフラ依
存型」などタイプごとの標準化ではなく,全てに
共通する要件を車両とインフラそれぞれに規定し,
さらにそれらを合わせた AVP として機能するシ
ステム要件を制定できるよう国際標準化案を取り
まとめており,ISO 国際標準として「2021 年の
発行」を目指している.
8. 今後の課題
機能実証実験実施により,自動車メーカやサプ
ライヤだけでなく,駐車場関連事業者,駐車場機
器メーカから,具体的に何を駐車場側に装備すれ
ば良いか,あるいは,将来的に AVPが普及しても
対応できる駐車場レイアウトを検討したいなど,
予想以上に多くの関心を得ることができた.しか
しながら,AVP実用化にはまだいくつかの課題が
残る.
課題 1: AVP専用エリアの確保
一般車両と歩行者を分離した AVP 専用エリア
が必要になるため,いかにその専用エリアを確保
するかが課題である.
また現実的には,既存の駐車場において AVP
専用エリアを設ける場合,AVP普及初期は利用台
数が限られるため,数台のスペースからスタート
し,普及とともに徐々に拡大していく必要がある.
それらを実現するレイアウト・構造を検討しなけ
ればならない.
あるいは,新規の駐車場建設や改修に合わせて,
将来的な AVP 対応駐車場に必要となるそれらの
構造を織り込むことが,AVP対応駐車場普及のカ
ギになるため,駐車場関連事業者との連携をさら
に強化し検討していく必要がある.
課題 2: ビジネスモデル
飛行場やホテル・レストランなどで,自動車の
鍵とともに車両を預ける「人手によるバレーパー
キング」がすでに存在する.その場合のビジネス
モデルはシンプルであり,需要に応じて人を雇い,
利用料金収入との関係で採算性を確保するビジネ
スモデルである.
それに対して,無人で行う AVPの場合は今まで
と異なり複雑になる.
初期投資として,クルマ側の車載機や駐車場イ
ンフラ整備等に大きな費用が必要となり,また,
クルマと駐車場の普及が進むまでの間は,利用で
きる機会が限られるため,それらの初期投資が普
及の足かせとなる懸念がある.
よって,初期投資分を補うには,AVP利用料金
の単独サービスだけでは採算性を確保することは
困難であり,たとえば,駐車中に自動で充電する
サービスや洗車してくれるサービス,あるいは,
買い物中に購入した荷物をクルマへあらかじめ届
けてくれるサービスなど,新たなビジネスモデル
を作ることが必要である.
今後も,広く自動運転の研究をしている JARI
が,AVP普及の一助となるよう継続して研究し貢
献していきたい.
- 7 -
JARI Research Journal (2019.10)
参考文献
1) 経済産業省:
平成 28 年度スマートモビリティシステム研究開発・実証
事業(自動バレーパーキングの実証及び高度な自動走行シ
ステムの実現に必要な研究開発)成果報告書,
https://www.meti.go.jp/meti_lib/report/H28FY/000539.p
df (2019.10.9)
平成 29 年度高度な自動走行システムの社会実装に向けた
研究開発・実証事業(自動バレーパーキングの実証及び高
度な自動走行システムの実現に必要な研究開発)成果報告
書,
https://www.meti.go.jp/meti_lib/report/H29FY/000362.p
df (2019.10.9)
平成 30 年度高度な自動走行システムの社会実装に向けた
研究開発・実証事業(自動バレーパーキングの実証及び高
度な自動走行システムの実現に必要な研究開発)成果報告
書,
https://www.meti.go.jp/meti_lib/report/H30FY/000350.p
df (2019.10.9)
2) 警察庁交通局: 2019年 7月 22日発行 令和元年上半期
における交通死亡事故の発生状況,
https://www.npa.go.jp/publications/statistics/koutsuu/ji
ko/R1kamihanki_bunseki2.pdf (2019.10.9)
3) 自動走行ビジネス検討会:「自動走行の実現に向けた取
組報告と方針」報告書概要 Version3.0,
https://www.meti.go.jp/shingikai/mono_info_service/jido
_soko/pdf/20190626_02.pdf (2019.10.9)
4) 高度情報通信ネットワーク社会推進戦略本部・官民デ
ータ活用推進戦略会議: 2019年 6月 7日発行 官民 ITS構
想・ロードマップ 2019,
https://www.kantei.go.jp/jp/singi/it2/kettei/pdf/2019060
7/siryou9.pdf (2019.10.9)















![CALS/EC実証実験現場の紹介...Y)...:) [] ()... CALS:)](https://img.pdfslide.tips/doc/110x75/5f911b508043ba271f7c7f2a/-calseceecc-y-cals-.jpg)