Embed Size (px)
Citation preview

EQUILIBRIO E STABILITA’ STATICA
LONGITUDINALE. ALA ISOLATA E VELIVOLO
PARZIALE
introduzione
Un aereo di peso W, costante in volo orizzontale rettilineo uniforme in aria di densità ρ
assegnata, deve soddisfare, se considerato come un punto materiale, l’equilibrio delle
forze lungo la traiettoria (la spinta deve uguagliare la resistenza) e perpendicolarmente a
questa (la portanza deve uguagliare il peso), nonché l’equilibrio del momento longitudinale
(cioè attorno all’asse di beccheggio). Accanto al soddisfacimento dell’equilibrio è anche
auspicabile che questo sia stabile, e che quindi per una variazione positiva dell’incidenza
(a cabrare) nasca un momento longitudinale negativo (a picchiare) che riduca il suddetto
incremento di incidenza. Devono valere quindi le quattro relazioni:
L = W
T = D
CMCG = 0
0<∂
∂αMCGc
equilibrio e stabilità statica longitudinale dell’ala isolata
Se l’aereo si riduce alla sola ala, l’espressione che fornisce il momento baricentrico
longitudinale risulta:
( ) ***2**22, 2
121
21 TzSVcxxSVcSlVcM ZDCACGLCAMCG ++−+= ρρρ
essendo CM,CA il coefficiente del momento valutato rispetto al centro aerodinamico dell’ala
isolata; xCG* e xCA
* le distanze del baricentro e del centro aerodinamico a partire dal bordo
d’attacco, misurate parallelamente alla direzione della velocità V; z* la distanza tra il

baricentro e la parallela alla direzione della velocità V passante per il centro aerodinamico;
infine z** è il braccio della spinta (che si suppone agire parallelamente alla velocità) rispetto
al baricentro. Lo schema riportato, oltre all’inconveniente di essere piuttosto complesso (vi
figurano quattro termini), ha quello che i bracci delle varie forze rispetto al baricentro
variano al variare dell’incidenza α. Dato però che nel campo delle incidenze normalmente
considerato (inferiore ai 20°) è generalmente lecito ritenere cos(α)=1 e sen(α)=α, e dato
che è lecito trascurare il momento della spinta (che in un’ampia gamma di assetti è
inferiore ad un decimo del peso del velivolo) si può giungere alla più semplice:
( )**22
21
21
CACGLCAMCG xxSVcSlVcM −+= ρρ
Dividendo l’equazione per la pressione dinamica di riferimento, per la superficie di
riferimento e la corda di riferimento (CMA indicata con l per non confondere con il termine
CMCA), si ottiene:
( ) ( )CACGLMCACACG
LMCAMCG xxcclxx
ccc −+=−
+=**
dove xCG e xCA sono la distanze del baricentro e del centro aerodinamico a partire dal
bordo d’attacco ed espresse adimensionalmente in frazioni della corda l. Ricordiamo che
per incidenze non troppo elevate si può assumere:
αα
∂∂
= LL
cc
e possiamo scrivere:
( )CACGL
MCAMCG xxc
cc −
∂∂
+= αα
Per assicurare il volo orizzontale rettilineo uniforme, deve risultare uguale a zero. E’
possibile ricavare il valore del coefficiente di portanza espresso dalla

( )CACG
MCALL xx
ccc
−−=
∂∂
= αα
e ricordando che per definizione CM,CA non dipende dall’incidenza, derivando l’equazione
rispetto all’assetto di volo, otteniamo l’espressione dell’indice di stabilità:
( )CACGLMCG xxcc
−
∂∂
=
∂
∂αα
Poiché la pendenza della curva CL-α dell’ala è positiva, la stabilità statica longitudinale
viene quindi a dipendere dal segno della parentesi a secondo membro:
se xCG è minore di xCA (cioè il baricentro si trova davanti al centro aerodinamico) l’ala è
staticamente stabile;
se xCG e xCA sono uguali (baricentro e centro aerodinamico coincidono) l’equilibrio è
indifferente;
se infine xCG è maggiore di xCA (cioè se il baricentro si trova dietro il centro aerodinamico)
l’ala è staticamente instabile.
Riconosciuto quindi che deve essere (xCG-xCA)<0 si può osservare che il CL di volo, ha il
medesimo segno di CM,CA.
I profili usuali con linea media concava verso il basso e CM,CA negativi (cioè picchianti),
porteranno ad ali volanti, che, se stabili, voleranno con CL negativi e, quindi in volo
rovescio.
Un profilo biconvesso simmetrico con CM,CA=0, non permetterà di volare, perché il
coefficiente di portanza di equilibrio sarebbe nullo.
Solo un profilo caratterizzato da CM,CA>0, perciò, consentirebbe un volo corretto.
Sulla base delle considerazioni ora esposte, i profili con CM,CA negativo sono detti instabili;
quelli con CM,CA nullo (biconvessi simmetrici) sono detti indifferenti; quelli con CM,CA
positivo sono detti autostabili. Vedremo che il nostro profilo è instabile.
Il coefficiente di momento dell’ala attorno al centro aerodinamico e centro aerodinamico
dell’ala in configurazione pulita

La lunghezza della corda media aerodinamica del nostro aeromobile è già stata
determinata precedentemente, il valore è:
CMA=21,34 ft
Avevamo anche già calcolato la posizione, rispetto alla corda di mezzeria, della CMA che
risultava essere:
x*ba,CMA=24,2 ft
Per definire la posizione della CMA rispetto al muso del velivolo, è sufficiente stabilire la
posizione dell’ala relativamente alla fusoliera. Il bordo d’attacco della corda di mezzeria
dell’ala (cioè il punto ottenuto prolungando immaginariamente i bordi d’attacco delle due
semiali fino ad intersecarsi) si trova ad una distanza dal muso del velivolo pari a:
xba,ROOT=70,2 ft
In questo modo la corda media aerodinamica è posta alla seguente distanza dal muso
dell’aeromobile:
xba,CMA=94,4 ft
Nota la corda media aerodinamica e la sua posizione, determiniamo il centro
aerodinamico dell’ala mediante la seguente:
+= ∫∫
2/
2/1
*2/1
0
** )()()()(2/
1 b
b
CA
b
CAalaCA dyycyxdyycyxS
x
essendo x*CAala la posizione del centro aerodinamico dell’ala rispetto al centro
aerodinamico del profilo di mezzeria,e x*CA(y) la posizione del centro aerodinamico della
generica sezione di ascissa y, sempre relativamente al C.A. del profilo di mezzeria.
Partendo dai dati di partenza dei nostri profili riportati in tabella:

profilo x/c c* c c° 65-415 0,268 41,1 11,0148 30,0852
65-412 0,265 26,7 7,0755 19,6245
65-410 0,26 6,7 1,742 4,958
E calcolate le equazioni per le due semi-metà ala:
x1(y)=11,02-0,4934y
x2(y)=23,29-0,1729y
e riportando le equazioni delle corde:
c1(y)=41,1-0,6792y
c2(y)=31,7-0,2358y
integrando otteniamo:
x*CAala= 20,97 ft
Riportando questa distanza rispetto al bordo d’attacco della CMA e, adimensionalizzando
rispetto alla lunghezza della stessa, si trova:
365,0*****
=++
==MA
alaBAalaCAROOTCA
MA
alaCAalaCA c
xxxcx
x
Il coefficiente di momento rispetto al centro aerodinamico dell’ala è già stato trovato:
alaCAMc , = -0,0515
Il piano di coda orizzontale
Corda media aerodinamica
Già nei capitoli precedenti avevo calcolato le caratteristiche geometriche del piano di

coda orizzontale:
croot = 22,2 ft
ctip = 10 ft
Λ = 40°
Sh = 1024 ft2
b = 64 ft
L’andamento della corda aerodinamica lungo l’apertura è:
c(y) = -0,38125 y +22,1
La corda media aerodinamica vale :
( )∫=2b
0
2 dxxc2S
1CMA
ottenendo per il piano di coda il valore:
CMAtail = 16,97 ft
Come per l’ala, calcolo la posizione del bordo d’attacco della corda media
aerodinamica dei piani di coda orizzontali:
2/S
dy)y(c)y(xx
2/b
0ba
CMA,ba
∫ ⋅=
in cui
xba = 0,839 ft
Integrando :
xbaCMA-tail = 0,839 ft

Centro aerodinamico del piano di coda orizzontale
Il piano di coda orizzontale è composto da un solo tipo di profilo simmetrico NACA-
0012 per cui il centro aerodinamico è situato ad un quarto della corda:
xCA = 0.25 c
Considero un sistema di riferimento che sia posizionato in mezzeria in
corrispondenza dei piani di coda e con origine coincidente con il centro aerodinamico
del profilo alla radice ; il centro aerodinamico dei profili che compongono la
superficie in considerazione ha una posizione che può essere espressa lungo
l’apertura come:
xCA(y) = 0.7437 y
Il valore della posizione del centro aerodinamico dei piani di coda è :
∫=2/
0
)()(2/
1 b
CAtailCA dyycyxS
x
ottengo:
x’CA-tail. =10,46 ft
La posizione del centro aerodinamico dei piani di coda in frazione della corda media
aerodinamica dei piani di coda si ricava da :
in cui compaiono i seguenti valori:
x’c.a.tail = 2.742 m
x’c.a.root = 1.743 m
x’c.a.CMA = 3.196 m
CMA = 5.005 m

Quindi:
xc.a.tail = 0.257 m
coefficiente di momento dell’ala attorno al centro aerodinamico e
centro aerodinamico dell’ala con ipersostentatori deflessi
Valutiamo in che modo il centro aerodinamico e il coefficiente di momento dell’ala variano
quando vengono estesi gli ipersostentatori. Considereremo un particolare che la
deflessione di questi sia quella massima, cioè 45°.
Procediamo nel seguente modo. Per prima cosa valutiamo l’effetto degli ipersostentatori
sul coefficiente di momento rispetto al bordo d’attacco per un’ala rettangolare, grazie alla
relazione:
( ) ( )
−
+
−
∆−−
∆=∆
== 1'1''25,0''2
0,
2
0
2
, ccc
cc
ccccx
cccc alaCAMLLalaCAMrettBAM ββ
dove:
211 )6()(' λλλµ
FFc M =∆
In queste espressioni CLβ=0 è il coefficiente di portanza per l’ala in configurazione pulita,
∆CL è la variazione del coefficiente di portanza dovuto agli ipersostentatori, xCAala è stato
calcolato e, (CMCA,ala) β=0 è il coefficiente di momento dell’ala in configurazione pulita.
Inoltre i coefficienti λ1, λ2, F(λ)/F(6) sono gli stessi già utilizzati nel capitolo degli
ipersostentatori, mentre µ1 è diagrammato sulle dispense del Picardi. Per tenere conto del
fatto che la nostra ala non è rettangolare il risultato ottenuto con l’espressione scritta
pocanzi, va corretto nel modo seguente:
rettBAMBAM cc ,2∆=∆ µ

essendo µ2 un coefficiente diagrammato sempre sulle dispense.Riassumiamo nella
seguente tabella i valori dei parametri che compaiono nelle formule presentate:
λ1 0,575
λ2 1,7
F(λ)/F(6) 1,1
µ1 -0,29
µ2 0,38
∆c'M -0,3209
Valutiamo ora l’effetto degli ipersostentatori sul coefficiente di momento dell’ala riferito, si
badi bene, al bordo d’attacco. I risultati sono riportati nella seguente tabella.
alfa ala CL-ala CL con beta
45 CM ca-ala Delta Cmrba Cmba -11,68 -0,1456 0,90464 -0,0449087 -0,17270366 -0,16446836
-10,398 -0,6567 0,286209 -0,0449087 -0,16835318 0,02643362
-9,116 -0,6395 0,307021 -0,0449087 -0,16849958 0,02000922
-7,834 -0,56032 0,4028288 -0,0449087 -0,16917357 -0,00956547
-6,552 -0,43502 0,5544418 -0,0449087 -0,17024012 -0,05636652
-5,27 -0,33276 0,6781764 -0,0449087 -0,17111056 -0,09456186
-3,988 -0,2372 0,793804 -0,0449087 -0,17192396 -0,13025466
-2,706 -0,1272 0,926904 -0,0449087 -0,17286028 -0,17134098
-1,424 -0,0138 1,064118 -0,0449087 -0,17382554 -0,21369724
-0,142 0,08576 1,1845856 -0,0449087 -0,174673 -0,2508841
1,14 0,19316 1,3145396 -0,0449087 -0,17558719 -0,29099929
2,422 0,2968 1,439944 -0,0449087 -0,17646937 -0,32971007
3,704 0,40044 1,5653484 -0,0449087 -0,17735155 -0,36842085
4,986 0,49896 1,6845576 -0,0449087 -0,17819016 -0,40521926
6,268 0,6034 1,81093 -0,0449087 -0,17907915 -0,44422885
7,55 0,70044 1,9283484 -0,0449087 -0,17990515 -0,48047445
8,832 0,80044 2,0493484 -0,0449087 -0,18075635 -0,51782565
10,114 0,89364 2,1621204 -0,0449087 -0,18154967 -0,55263697
11,396 1,05758 2,3604878 -0,0449087 -0,18294513 -0,61387053
12,678 1,16724 2,4931764 -0,0449087 -0,18387856 -0,65482986
13,96 1,24758 2,5903878 -0,0449087 -0,18456241 -0,68483781
15,242 1,34734 2,7110974 -0,0449087 -0,18541157 -0,72209937

16,524 1,42882 2,8096882 -0,0449087 -0,18610512 -0,75253312
17,806 1,48884 2,8823124 -0,0449087 -0,18661602 -0,77495132
19,088 1,5385 2,942401 -0,0449087 -0,18703872 -0,79349992
20,37 1,58338 2,9967058 -0,0449087 -0,18742074 -0,81026314
21,652 1,59944 3,0161384 -0,0449087 -0,18755744 -0,81626174
22,934 1,5951 3,010887 -0,0449087 -0,1875205 -0,8146407
24,216 1,48034 2,8720274 -0,0449087 -0,18654366 -0,77177646
25,498 1,37004 2,7385644 -0,0449087 -0,18560479 -0,73057809
26,78 0,26572 1,4023372 -0,0449087 -0,17620482 -0,31810132
28,062 0,23842 1,3693042 -0,0449087 -0,17597244 -0,30790444
29,344 0,2093 1,334069 -0,0449087 -0,17572457 -0,29702777
30,626 0,1911 1,312047 -0,0449087 -0,17556965 -0,29022985
31,908 0,182 1,301036 -0,0449087 -0,17549219 -0,28683089
Nell’ultima colonna della tabella si è calcolato il coefficiente di momento aerodinamico
dell’ala rispetto al bordo d’attacco, corretto per la presenza degli ipersostentatori. Si è
utilizzata a tal fine la seguente relazione:
( ) 0,0,0,, ===−+∆= βββ alaLalaCAalaCAMBAMalaBAM cxccc
La retta di regressione dei dati ha la seguente espressione:
( ) ααβ
0283,02557,00,, −−=+=
=alaCAMalaBAM cBAc
Si può quindi ricavare immediatamente il centro aerodinamico dell’ala con gli
ipersostentatori estesi:
( ) ( )( ) °=
°=°= ∂∂
∂∂−=
30
045
β
ββ α
α
L
LalaCA c
cBx

Grafico CM-alfa per ipersostentatori a 45°
y = -0,0283x - 0,2557-1
-0,9-0,8-0,7-0,6-0,5-0,4-0,3-0,2-0,1
00,1
-10 -5 0 5 10 15 20 25
angolo
Coe
ffici
ente
di M
omen
to
.
equilibrio e stabilità longitudinale del velivolo parziale
Le correzioni apportate al CM,CA dell’ala isolata per ottenere il CM,CA del velivolo parziale si
basano essenzialmente su formule semi empiriche, frutto dei risultati della
sperimentazione in galleria.
Si assume che la pendenza della curva CL-α del velivolo parziale sia uguale a quella della
curva CL-α dell’ala isolata, in quanto, i pur limitati CL, che fusoliera e gondole motrici
forniscono ad un’opportuna incidenza, finiscono per bilanciare le diminuzioni di CL dell’ala
dovute all’interferenza appunto di queste ultime.
L’effetto della fusoliera e dei motori sul velivolo è instabilizzante, tanto più quanto maggiori
sono la lunghezza e l’ingombro degli stessi anteriormente l’ala. In altri termini, applicare
una fusoliera e dei motori ad un’ala isolata, fa avanzare il centro aerodinamico, col rischio
(in realtà certezza) che superi il baricentro del velivolo. Vediamo in dettaglio di
determinarne l’effetto.

descrizione del metodo
In generale la fusoliera e le gondole forniranno una variazione del coefficiente di momento,
rispetto al centro aerodinamico del velivolo (ancora incognito), che si può esprimere nella
forma:
αα
∂∂
+∆=∆ MMM
ccc 0
Si tratta dunque di calcolare i termini ∆CM0 e ∂CM/∂α separatamente per la fusoliera e per
le gondole, sommando poi i vari contributi, al fine di ottenere la variazione totale del
coefficiente, con la quale sarà poi possibile determinare il nuovo centro aerodinamico.
Il termine ∆CM0 si esprime, sia per le gondole che per la fusoliera, nella forma:
[ ]dxxixwSckk
cl
LCalaMA
M ∫ +−
=∆0
0221
0 )()(5.36
α
L’integrale è esteso lungo l’ascissa orizzontale x dell’elemento considerato (fusoliera o
gondola). Il valore di k1-k2 è diagrammato in funzione del rapporto di snellezza; w(x)
rappresenta la larghezza massima dell’elemento nella posizione di ascissa x; α0ala è
l’angolo tra la direzione di portanza nulla dell’ala e la direzione di riferimento (parallela
all’asse di fusoliera); infine, iCL(x) è l’inclinazione della linea media dell’elemento in
considerazione, sempre rispetto alla direzione di riferimento.
Il termine ∂CM/∂α si esprime nel modo seguente:
( ) ( )
+
∂∂
+
+
∂∂
=∆ ∫∫ dxxwdxxwSc
cll
MAM
21
0 2
2
0 1
20 11
5.361
αε
αε
Il primo integrale si estende alla zona anteriore al bordo d’attacco della sezione d’incastro
tra l’ala e l’elemento cui l’equazione è applicata; il secondo integrale, si estende sulla zona
posteriore al bordo d’uscita della sezione di incastro tra l’ala e l’elemento cui l’equazione è

applicata. Il termine di upwash (∂ε/∂α)1, e il termine di downwash (∂ε/∂α)2, hanno le
seguenti espressioni:
( )0785,011
alaLc ααε
αε ∂∂
∂∂
=
∂∂
1122
2
1
−
∂∂
−=
∂∂
αε
αε
lx
I valori (∂ε/∂α)1 e (∂ε/∂α)2, rappresentano delle quantità diagrammate e da determinarsi in
base ai parametri geometrici dell’ala e dell’elemento in analisi. Se i valori di questi
parametri, sui diagrammi, non corrispondono a quelli della propria ala, si ricorrerà a
tecniche di interpolazione.
Nota la variazione totale, introdotta dalla fusoliera e dalle gondole, del coefficiente di
momento, il centro aerodinamico del velivolo parziale si calcola tramite la relazione:
( )( )α
α∂∂∂∂
−=L
MalaCAvpCA c
cxx
mentre, il valore costante del coefficiente di momento rispetto al centro aerodinamico è
dato dalla:
0,, MalaCAMvpCAM ccc ∆+=
velivolo in configurazione pulita
contributo della fusoliera
Iniziamo col trattare il contributo della fusoliera. La fusoliera del nostro velivolo è lunga 209
ft ed ha un diametro di 20 ft, ha dunque un rapporto di snellezza pari a 10,45. A questo
corrisponde i un valore del rapporto k2-k1:

k2-k1= 0,93
Il valore dell’integrale è stato risolto numericamente, discretizzando le funzioni che vi
compaiono. Si è suddivisa la fusoliera in 35 parti (15 per il muso, una per il corpo centrale
e le restanti per la coda) e ad ognuna di esse è stato associato il valore medio delle
grandezze a questa relative.
Il valore dell’angolo tra la direzione di riferimento della fusoliera e la direzione di portanza
nulla dell’ala in configurazione pulita è α0ala=-1,296° .Nella seguente tabella, sono riportati i
calcoli per la valutazione dell’integrale a secondo membro dell’equazione scritta
precedentemente.
Parte ∆x w w2 iCL iCL+α0-ala w2(iCL+α0-ala)∆x1 2 4 16 -3 -6,296 -201,472
2 2 7 49 -25 -28,296 -2773,008
3 2 9 81 -2 -5,296 -857,952
4 2 11 121 -1 -4,296 -1039,632
5 2 13 169 -1 -4,296 -1452,048
6 2 14 196 -2 -5,296 -2076,032
7 2 15 225 -5 -8,296 -3733,2
8 2 16 256 -11 -14,296 -7319,552
9 2 17 289 -15 -18,296 -10575,088
10 2 17,5 306,25 -2 -5,296 -3243,8
11 2 18 324 -0,5 -3,796 -2459,808
12 2 18,5 342,25 -0,5 -3,796 -2598,362
13 2 19 361 -0,5 -3,796 -2740,712
14 2 19,5 380,25 -0,5 -3,796 -2886,858
15 2 20 400 0 -3,296 -2636,8
16 120 20 400 0 -3,296 -158208
17 5 19,5 380,25 0 -3,296 -6266,52
18 5 19 361 -10 -13,296 -23999,28
19 5 18 324 -7 -10,296 -16679,52
20 5 17 289 -5 -8,296 -11987,72
21 5 16 256 -4 -7,296 -9338,88
22 5 15 225 -2 -5,296 -5958
23 5 13,5 182,25 -0,5 -3,796 -3459,105
24 2 12 144 -1 -4,296 -1237,248
25 2 11 121 -0,5 -3,796 -918,632
26 2 10 100 -0,5 -3,796 -759,2

27 2 9 81 -0,5 -3,796 -614,952
28 2 8,2 67,24 -0,5 -3,796 -510,48608
29 2 7,7 59,29 -0,5 -3,796 -450,12968
30 2 7 49 -0,5 -3,796 -372,008
31 2 6,5 42,25 -2 -5,296 -447,512
32 2 6 36 -4 -7,296 -525,312
33 2 5,5 30,25 -0,5 -3,796 -229,658
34 2 5 25 -0,5 -3,796 -189,8
35 2 4 16 -0,5 -3,796 -121,472
Sommando i dati dell’ultima colonna, ottengo il valore dell’integrale al secondo membro.
Ne segue che il valore di ∆CM0 è:
(∆CM0)fus=-0,0718
Passiamo ora a calcolare il valore di ∂CM/∂α per la fusoliera.
Per risolvere il primo integrale dobbiamo richiamare il valore di ∂CL/∂α della nostra ala in
configurazione pulita, che è pari a 0,0774. Nella prossima tabella sono riassunti i calcoli
relativi.
x1 x1/c1 ∆x w w^2 ∂ε/∂α* ∂ε/∂α prodotto 1 70,8 1,722627737 2 4 16 0,3 0,29579618 1,2957962
2 68,8 1,673965937 2 7 49 0,35 0,34509554 1,3450955
3 66,8 1,625304136 2 9 81 0,4 0,3943949 1,3943949
4 64,8 1,576642336 2 11 121 0,45 0,44369427 1,4436943
5 62,8 1,527980535 2 13 169 0,5 0,49299363 1,4929936
6 60,8 1,479318735 2 14 196 0,524 0,51665732 1,5166573
7 58,8 1,430656934 2 15 225 0,548 0,54032102 1,540321
8 56,8 1,381995134 2 16 256 0,572 0,56398471 1,5639847
9 54,8 1,333333333 2 17 289 0,596 0,58764841 1,5876484
10 52,8 1,284671533 2 17,5 306,25 0,62 0,6113121 1,6113121
11 50,8 1,236009732 2 18 324 0,644 0,6349758 1,6349758
12 48,8 1,187347932 2 18,5 342,25 0,668 0,65863949 1,6586395
13 46,8 1,138686131 2 19 361 0,692 0,68230318 1,6823032
14 44,8 1,090024331 2 19,5 380,25 0,716 0,70596688 1,7059669
15 42,8 1,04136253 2 20 400 0,74 0,72963057 1,7296306
16 40,8 0,99270073 40,8 20 400 0,76 0,74935032 1,7493503

Sommando i dati dell’ultima colonna ottengo il valore del primo integrale al secondo
membro.
Per risolvere il secondo integrale dobbiamo definire la posizione del piano di coda
(seppure stiamo ancora trattando il velivolo parziale). Nella seguente figura sono definiti i
parametri geometrici r* ed m*, rispettivamente distanza valutata parallelamente e
ortogonalmente alla direzione di portanza nulla dell’ala tra il centro aerodinamico del piano
di coda, e il punto al 25% della corda del profilo della sezione di incastro.
Per il nostro velivolo I valori sono:
r* = 100 ft
m* = 10,25 ft
Dividendo r* ed m* per la semi apertura alare, si ottengono due parametri adimensionali r
ed m che ci permettono di ricavare il valore di (∂ε/∂α)2 diagrammato. Si ottiene:
r = 0,9433
m = 0,0967
56,02
=
∂∂αε
Nella seguente tabella sono riportati i calcoli per la valutazione del secondo integrale
X1 x1/c1 ∆x w w^2 (∂ε/∂α)2 ∂ε/∂α prodotto38,1 0,927007299 38,1 20 400 0,56 -0,8273532 2631,137
43,1 1,0486618 5 20 400 0,56 -0,8046962 390,6076
48,1 1,170316302 5 19 361 0,56 -0,7820391 393,4194
53,1 1,291970803 5 18 324 0,56 -0,7593821 389,801
58,1 1,413625304 5 17 289 0,56 -0,736725 380,4323
63,1 1,535279805 5 15 225 0,56 -0,714068 321,6735
68,1 1,656934307 5 13,6 184,96 0,56 -0,6914109 285,3832
73,1 1,778588808 5 11 121 0,56 -0,6687539 200,4039
75,1 1,827250608 2 9 81 0,56 -0,659691 55,13005
77,1 1,875912409 2 10 100 0,56 -0,6506282 69,87436
79,1 1,924574209 2 8,9 79,21 0,56 -0,6415654 56,78321
81,1 1,97323601 2 7 49 0,56 -0,6325026 36,01475

83,1 2,02189781 2 6 36 0,56 -0,6234398 27,11234
85,1 2,070559611 2 6,3 39,69 0,56 -0,6143769 30,61076
87,1 2,119221411 2 5 25 0,56 -0,6053141 19,73429
89,1 2,167883212 2 4 16 0,56 -0,5962513 12,91996
91,1 2,216545012 2 3,5 12,25 0,56 -0,5871885 10,11388
93,1 2,265206813 2 2,2 4,84 0,56 -0,5781256 4,083744
95,1 2,313868613 2 1,8 3,24 0,56 -0,5690628 2,792473
97,1 2,362530414 2 1 1 0,56 -0,56 0,88
Sommando i dati dell’ultima colonna abbiamo il valore del secondo integrale.
Sostituendo i valori, approssimati, degli integrali così calcolati otteniamo il seguente
risultato:
001209,0=
∂∂
fus
MCα
contributo delle gondole motrici
Ripetiamo ora i calcoli eseguiti per la fusoliera per i contributi delle gondole motrici.
La lunghezza di una gondola è 25,8 ft, mentre il suo diametro è 12,5 ft, per un rapporto di
snellezza pari a 2,064. Avremo corrispondentemente:
k2-k1=0,63
∆x w W2 iCL iCL+α0-ala w2(iCL+α0-ala)∆x 1 2 11 121 0 -2,296 -555,632
2 2 11,9 141,61 0 -2,296 -650,27312
3 2 12,4 153,76 0 -2,296 -706,06592
4 2 12,5 156,25 0 -2,296 -717,5
5 2 11,9 141,61 0 -2,296 -650,27312
6 2 11,3 127,69 0 -2,296 -586,35248
7 2 10,8 116,64 0 -2,296 -535,61088
8 3 9,7 94,09 0 -2,296 -648,09192
9 2 7 49 0 -2,296 -225,008
10 2 5,5 30,25 0 -2,296 -138,908
11 0,8 5 25 0 -2,296 -45,92
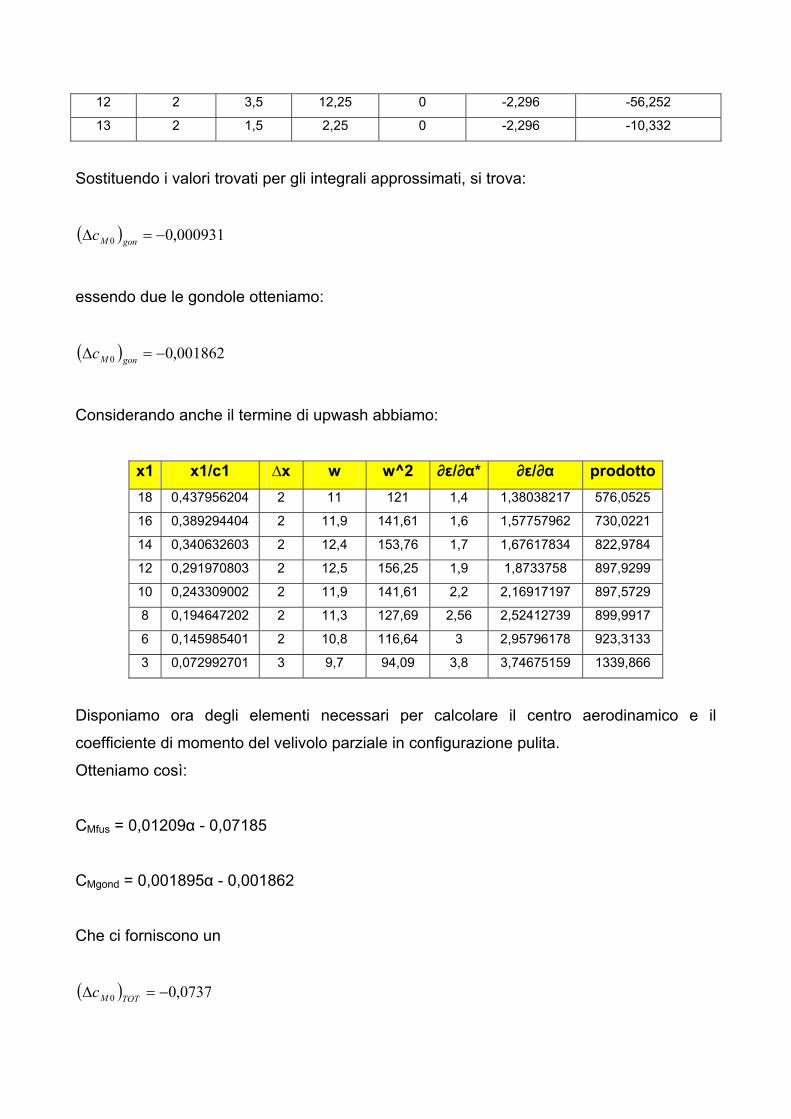
12 2 3,5 12,25 0 -2,296 -56,252
13 2 1,5 2,25 0 -2,296 -10,332
Sostituendo i valori trovati per gli integrali approssimati, si trova:
( ) 000931,00 −=∆ gonMc
essendo due le gondole otteniamo:
( ) 001862,00 −=∆ gonMc
Considerando anche il termine di upwash abbiamo:
x1 x1/c1 ∆x w w^2 ∂ε/∂α* ∂ε/∂α prodotto18 0,437956204 2 11 121 1,4 1,38038217 576,0525
16 0,389294404 2 11,9 141,61 1,6 1,57757962 730,0221
14 0,340632603 2 12,4 153,76 1,7 1,67617834 822,9784
12 0,291970803 2 12,5 156,25 1,9 1,8733758 897,9299
10 0,243309002 2 11,9 141,61 2,2 2,16917197 897,5729
8 0,194647202 2 11,3 127,69 2,56 2,52412739 899,9917
6 0,145985401 2 10,8 116,64 3 2,95796178 923,3133
3 0,072992701 3 9,7 94,09 3,8 3,74675159 1339,866
Disponiamo ora degli elementi necessari per calcolare il centro aerodinamico e il
coefficiente di momento del velivolo parziale in configurazione pulita.
Otteniamo così:
CMfus = 0,01209α - 0,07185
CMgond = 0,001895α - 0,001862
Che ci forniscono un
( ) 0737,00 −=∆ TOTMc

Con questi dati utilizzando le formule proposte otteniamo:
∆xc.a. = -0,088847
xc.a.vp=0,2762
CMc.a.vp=-0,1830
velivolo con ipersostentatori deflessi
Dobbiamo ora ripetere gli stessi calcoli appena svolti, tenendo conto di quei parametri che
variano a causa dell’estensione degli ipersostentatori. Si assume la massima deflessione
necessaria al velivolo (45°).
Nel calcolo di ∆CM0 cambia unicamente il valore di α0ala, l’angolo tra la direzione di
portanza nulla e quella di riferimento: il suo valore è ora pari a –9,0353°.
Per quel che riguarda il calcolo di ∂CM/∂α, le differenze sono maggiori. Nel primo integrale,
si tratta di tenere conto del nuovo valore di ∂CL/∂α, pari ora a 0,0843, che interviene nella
valutazione di (∂ε/∂α)1. Il secondo integrale è influenzato invece dai parametri r ed m che
ora sono diversi, a causa della variazione della direzione di portanza nulla dell’ala. In
particolare r*= 97,47 ft ed m*= 23,74 ft.
I nuovi valori sono:
r = 0,9195
m = 0,2239
61,02
=
∂∂αε
contributo della fusoliera
Cominciamo dai conti relativi alla fusoliera.

Parte ∆x w w2 iCL iCL+α0-ala w2(iCL+α0-ala)∆x 1 2 4 16 -3 -14,0353 -449,1296
2 2 7 49 -25 -36,0353 -3531,4594
3 2 9 81 -2 -13,0353 -2111,7186
4 2 11 121 -1 -12,0353 -2912,5426
5 2 13 169 -1 -12,0353 -4067,9314
6 2 14 196 -2 -13,0353 -5109,8376
7 2 15 225 -5 -16,0353 -7215,885
8 2 16 256 -11 -22,0353 -11282,0736
9 2 17 289 -15 -26,0353 -15048,4034
10 2 17,5 306,25 -2 -13,0353 -7984,12125
11 2 18 324 -0,5 -11,5353 -7474,8744
12 2 18,5 342,25 -0,5 -11,5353 -7895,91285
13 2 19 361 -0,5 -11,5353 -8328,4866
14 2 19,5 380,25 -0,5 -11,5353 -8772,59565
15 2 20 400 0 -11,0353 -8828,24
16 120 20 400 0 -11,0353 -529694,4
17 5 19,5 380,25 0 -11,0353 -20980,86413
18 5 19 361 -10 -21,0353 -37968,7165
19 5 18 324 -7 -18,0353 -29217,186
20 5 17 289 -5 -16,0353 -23171,0085
21 5 16 256 -4 -15,0353 -19245,184
22 5 15 225 -2 -13,0353 -14664,7125
23 5 13,5 182,25 -0,5 -11,5353 -10511,54213
24 2 12 144 -1 -12,0353 -3466,1664
25 2 11 121 -0,5 -11,5353 -2791,5426
26 2 10 100 -0,5 -11,5353 -2307,06
27 2 9 81 -0,5 -11,5353 -1868,7186
28 2 8,2 67,24 -0,5 -11,5353 -1551,267144
29 2 7,7 59,29 -0,5 -11,5353 -1367,855874
30 2 7 49 -0,5 -11,5353 -1130,4594
31 2 6,5 42,25 -2 -13,0353 -1101,48285
32 2 6 36 -4 -15,0353 -1082,5416
33 2 5,5 30,25 -0,5 -11,5353 -697,88565
34 2 5 25 -0,5 -11,5353 -576,765
35 2 4 16 -0,5 -11,5353 -369,1296

x1 x1/c1 ∆x w w^2 ∂ε/∂α* ∂ε/∂α prodotto 70,8 1,722627737 2 4 16 0,3 0,32216561 42,3093
68,8 1,673965937 2 7 49 0,35 0,37585987 134,8343
66,8 1,625304136 2 9 81 0,4 0,42955414 231,5878
64,8 1,576642336 2 11 121 0,45 0,48324841 358,9461
62,8 1,527980535 2 13 169 0,5 0,53694268 519,4866
60,8 1,479318735 2 14 196 0,524 0,56271592 612,5846
58,8 1,430656934 2 15 225 0,548 0,58848917 714,8201
56,8 1,381995134 2 16 256 0,572 0,61426242 826,5024
54,8 1,333333333 2 17 289 0,596 0,64003567 947,9406
52,8 1,284671533 2 17,5 306,25 0,62 0,66580892 1020,308
50,8 1,236009732 2 18 324 0,644 0,69158217 1096,145
48,8 1,187347932 2 18,5 342,25 0,668 0,71735541 1175,53
46,8 1,138686131 2 19 361 0,692 0,74312866 1258,539
44,8 1,090024331 2 19,5 380,25 0,716 0,76890191 1345,25
42,8 1,04136253 2 20 400 0,74 0,79467516 1435,74
40,8 0,99270073 40,8 20 400 0,76 0,81615287 29639,61
x1 x1/c1 ∆x w w^2 (∂ε/∂α)2 ∂ε/∂α prodotto38,1 0,927007299 38,1 20 400 0,61 -0,8469722 2332,144
43,1 1,0486618 5 20 400 0,61 -0,8268898 346,2204
48,1 1,170316302 5 19 361 0,61 -0,8068074 348,7126
53,1 1,291970803 5 18 324 0,61 -0,786725 345,5055
58,1 1,413625304 5 17 289 0,61 -0,7666426 337,2014
63,1 1,535279805 5 15 225 0,61 -0,7465602 285,1197
68,1 1,656934307 5 13,6 184,96 0,61 -0,7264779 252,9533
73,1 1,778588808 5 11 121 0,61 -0,7063955 177,6307
75,1 1,827250608 2 9 81 0,61 -0,6983625 48,86527
77,1 1,875912409 2 10 100 0,61 -0,6903296 61,93409
79,1 1,924574209 2 8,9 79,21 0,61 -0,6822966 50,33057
81,1 1,97323601 2 7 49 0,61 -0,6742636 31,92216
83,1 2,02189781 2 6 36 0,61 -0,6662307 24,03139
85,1 2,070559611 2 6,3 39,69 0,61 -0,6581977 27,13226
87,1 2,119221411 2 5 25 0,61 -0,6501648 17,49176
89,1 2,167883212 2 4 16 0,61 -0,6421318 11,45178
91,1 2,216545012 2 3,5 12,25 0,61 -0,6340989 8,964578
93,1 2,265206813 2 2,2 4,84 0,61 -0,6260659 3,619682
95,1 2,313868613 2 1,8 3,24 0,61 -0,618033 2,475146

97,1 2,362530414 2 1 1 0,61 -0,61 0,78
Sostituendo i valori approssimati degli integrali, otteniamo i seguenti risultati:
( ) 20018,00 −=∆ fusMc
contributo delle gondole
Parte ∆x w w2 iCL iCL+α0-ala w2(iCL+α0-ala)∆x 1 2 11 121 0 -12,0353 -2912,5426
2 2 11,9 141,61 0 -12,0353 -3408,637666
3 2 12,4 153,76 0 -12,0353 -3701,095456
4 2 12,5 156,25 0 -12,0353 -3761,03125
5 2 11,9 141,61 0 -12,0353 -3408,637666
6 2 11,3 127,69 0 -12,0353 -3073,574914
7 2 10,8 116,64 0 -12,0353 -2807,594784
8 3 9,7 94,09 0 -12,0353 -3397,204131
9 2 7 49 0 -12,0353 -1179,4594
10 2 5,5 30,25 0 -12,0353 -728,13565
11 0,8 5 25 0 -12,0353 -240,706
12 2 3,5 12,25 0 -12,0353 -294,86485
13 2 1,5 2,25 0 -12,0353 -54,15885
E considerando anche il termine di upwash:
x1 x1/c1 ∆x w w^2 ∂ε/∂α* ∂ε/∂α prodotto18 0,437956204 2 11 121 1,4 1,50343949 605,8324
16 0,389294404 2 11,9 141,61 1,6 1,71821656 769,8533
14 0,340632603 2 12,4 153,76 1,7 1,8256051 868,9301
12 0,291970803 2 12,5 156,25 1,9 2,04038217 950,1194
10 0,243309002 2 11,9 141,61 2,2 2,36254777 952,3408
8 0,194647202 2 11,3 127,69 2,56 2,7491465 957,457
6 0,145985401 2 10,8 116,64 3 3,22165605 984,8279
3 0,072992701 3 9,7 94,09 3,8 4,08076433 1434,147

Ancora sostituendo i valori approssimati e moltiplicando per le due gondole,otteniamo i
seguenti risultati:
( ) 009762,00 −=∆ gonMc
Otteniamo così:
CMfus = 0,012323α - 0,20018
CMgond = 0,002012α - 0,009762
Che ci forniscono un
( ) 2099,00 −=∆ TOTMc
Con questi dati utilizzando le formule proposte otteniamo:
∆xc.a. = -0,09092
xc.a.vp=0,2741
CMc.a.vp=-0,31924

EQUILIBRIO E STABILITA’ STATICA
LONGITUDINALE del VELIVOLO
COMPLETO
introduzione
Dalle equazioni scritte, ma soprattutto dai conti effettuati è facile dedurre quali siano le
principali limitazioni dei velivoli che corrispondono allo schema di ala isolata
(sostanzialmente non sono muniti dell’impennaggio orizzontale), Per variare il CL di volo,
per essi è necessario, o variare il CMca (con rotazioni di superfici mobili del bordo d’uscita),
o variare la posizione del baricentro. Quest’ultima tecnica però, anche se trovò
applicazione nei primordi dell’aviazione, presenta l’inconveniente di far variare l’indice di
stabilità al variare del CL di volo, e non si presta certamente ad un agevole controllo del
velivolo (è la tecnica utilizzata nei deltaplani). L’impiego di superfici mobili del bordo
d’uscita, ha l’inconveniente di precludere l’impiego degli ipersostentatori in fase di
atterraggio (dato che il loro abbassamento provocherebbe sicuramente un CMca negativo),
e comporta una serie di limitazioni al valore del massimo CL ottenibile dato che la
rotazione verso l’alto delle superfici mobili ha peraltro un elevato effetto iposostentatore.
Abbiamo visto che passando al velivolo parziale le cose non sono migliorate.
La soluzione classica è quella di disporre posteriormente al baricentro del velivolo una
superficie di coda che, dato il suo braccio rilevante rispetto a questo, sia in grado di fornire
cospicui momenti baricentrica, grazie a forze portanti o deportanti, anche di limitata entità.
Detta SC la superficie in questione, d la distanza tra il bordo d’attacco dell’ala e il centro
aerodinamico CAC della superficie SC (misurata parallelamente alla direzione di portanza
nulla) e CLC il suo coefficiente di portanza, il momento baricentrica dovuto alla coda,
risulta:
( )C
CGCCLCCG VxdScM
−−= 2**
21 ρ

supponendosi trascurabile il momento dovuto alla resistenza in confronto a quello dovuto
alla portanza, e pure trascurabile il contributo del momento rispetto al CAC (in moltissimi
casi del resto, la coda è su profili biconvessi simmetrici, e il suo momento aerodinamico
focale è rigorosamente nullo).
Il coefficiente di portanza dell’impennaggio orizzontale si può calcolare dalla seguente:
( ) EL
CSc
LE
LC
C
LCL
ci
cccc δ
δεα
αδ
δα
α
∂∂
+−−
∂∂
=
∂∂
+
∂∂
=
essendo
• αC, l’incidenza dell’impennaggio orizzontale rispetto al vento relativo, e misurata a
partire dalla direzione di portanza nulla del piano di coda;
• α, l’incidenza dell’ala rispetto al suo vento relativo e misurata rispetto alla direzione
di portanza nulla;
• ε, il termine di downwash valutato in corrispondenza del CAC; questo angolo è
diretta conseguenza del fatto che l’ala produce una forza portante e per reazione
esercita una forza uguale e contraria sull’aria che la investe, deviandola verso il
basso. Tale angolo è espresso dalla relazione
• ααεεε
∂∂
+= 0
essendo 0ε il valore della deviazione della corrente che si ha quando l’ala non
fornisce portanza, funzione a sua volta del campo aerodinamico della fusoliera,
dell’interferenza ala-fusoliera e della geometria dei raccordi ala-fusoliera. Una
valutazione di 0ε non è possibile con le tecniche comunemente note, ed è
praticamente indispensabile ricorrere a prove in galleria per poter determinare il
valore di quest’angolo. In mancanza di dati sperimentali, assumeremo 0ε = 0;
• CSi l’angolo formato tra la direzione di portanza nulla dell’ala e la direzione di
portanza nulla della coda (angolo di calettamento dello stabilizzatore);
• La pendenza della curva di portanza dell’impennaggio orizzontale, dato il ridotto
allungamento di quest’ultimo e gli spesso vistosi effetti di interferenza della
fusoliera, non viene in genere calcolato con le vistose tecniche seguite per l’ala, ma
viene valutata sulla base di dati semiempirici;
• Eδ l’angolo di deflessione dell’equilibratore.

Possiamo scrivere:
( )C
CGCCSC
LCCG VxdSi
cM
−−−
∂∂
−= 2**
21)( ρεα
α
che possiamo adimensionalizzare dividendo questa espressione per la pressione
dinamica di riferimento dell’ala, per la superficie di riferimento dell’ala e per la corda media
aerodinamica dell’ala ( MAc = l). Otteniamo:
( )
−−−
∂∂
−=V
Vx
ld
SS
ic
c CCG
CCS
c
LCGM
ρ
ρεα
α21
21
*2
o anche:
ητδεαεα
α
−
+−−
∂∂
−
∂∂
−= CGC
ECSc
LCGM x
ld
SS
ic
c *1 0
dove si sono introdotti due nuovi simboli:
• η rappresenta il rapporta tra la pressione dinamica della corrente che investe la
coda e la pressione dinamica della corrente che investe l’ala; è compreso di norma
0,9 e 1,1: è maggiore di 1 se il flusso arriva in coda accelerato dal soffio delle eliche
(non è il nostro caso), è minore di 1 se il flusso arriva in coda rallentato dalla
resistenza dell’ala e della fusoliera;
• τ è un parametro che evita di sistemare la variazione di Lc della coda per una
deflessione unitaria dell’equilibratore. Infatti:
∂∂
∂∂
=αδ
τ LL cc
ed è funzione del rapporto tra la superficie della parte mobile della coda
(equilibratore) e quella della parte fissa (stabilizzatore).

La quantità
− CG
C xld
SS * è di estrema importanza nello studio della stabilità
longitudinale. Essa prende il nome di rapporto volumetrico di coda e il suo valore, di
norma, è compreso tra 0,5 e 1.
Derivando rispetto all’incidenza α l’equazione otteniamo l’espressione dell’indice di
stabilità della coda:
ηαε
αα
−
∂∂
−
∂∂
−=
∂
∂CG
C
c
L
C
CGM xld
SScc *1
Abbiamo già visto l’espressione dell’indice di stabilità del velivolo parziale: a questo punto
possiamo scrivere l’espressione dell’indice di stabilità del velivolo completo
( ) ηαε
ααα
−
∂∂
−
∂∂
−−
∂∂
=
∂
∂CG
C
c
LVPCACG
VP
L
VC
CGM xld
SSc
xxcc *1
In questa equazione il contributo del velivolo parziale è sicuramente positivo, e quindi
instabilizzante.
Il contributo della coda, invece, è negativo, e pur di scegliere un valore appropriato del
rapporto volumetrico di coda, riesce a rendere negativa tutta l’espressione, cioè è
possibile assicurare la stabilità di un aereo, anche per valori di CGx decisamente superiori
ad VPCAx .
E’ inoltre interessante notare come:
• la stabilità non dipenda da α , da Eδ e da VPCAMc , : questo significa che fissata una
posizione del baricentro, una volta che la stabilità sia assicurata per una condizione
di volo definita dai valori α e Eδ , la stabilità resta automaticamente soddisfatta per
qualsiasi altra condizione di volo;
• L’adozione per l’ala di profili aventi linee medie più o meno curve ( e quindi con
diversi valori di CAMc ) non ha alcun effetto sulla stabilità longitudinale.

Abbiamo già determinato i valori che caratterizzano l’escursione baricentrica. Possiamo
andare a rintracciare quali siano le posizioni più avanzate e più arretrate del baricentro.
Risulta:
xCG AV=0,18
xCG AR=0,28
Queste posizioni sono raggiunte in corrispondenza della modalità di carico 100% fuel, due
passeggeri in quarta fila, la prima, e con 0% fuel, tutti i passeggeri seduti.
stabilità statica longitudinale a comandi bloccati
Cominciamo col definire le caratteristiche geometriche del piano di coda, la cui
conoscenza è necessaria per i successivi calcoli. Le caratteristiche in questione sono
riassunte nella seguente
tabella:
SC [ft2] 1024
SE [ft2] 420
SE / SC 0,41015
SC / S 0,21333
bC [ft] 64
AR C 4
TR C 0,45045
cROOT,c [ft] 22,2
cTIP,c [ft] 10
Sweptback(c/4) [degrees] 37,5
Sweptback(b.a.) [degrees] 40
cMA C [ft] 16,97
cL,α c 0,059

Questa tabella rappresenta la geometria finale del piano di coda orizzontale Questi valori
dei parametri geometrici, ci portano a considerare i parametri aerodinamici, come si può
dedurre dalle tabelle e dai diagrammi:
u = 0,957
τ = 0,61
Altri parametri sono necessari per definire completamente la geometria dei piani di coda e
la loro posizione rispetto all’ala.
Riprendiamo i risultati riguardanti il velivolo parziale in configurazione pulita. In particolare
ricordiamo i seguenti:
VPCAx = 0,2762
VPCAMc , = -0,1830
VP
lc
∂∂α
= 0,0774
In questa configurazione inoltre definiamo i seguenti parametri relativi al piano di coda
orizzontale:
MAcd = 5,8318
CSi = 8°
essendo d la distanza tra il centro aerodinamico del piano di coda orizzontale e il bordo
d’attacco della corda media aerodinamica (d = 99 ft); il calettamento dello stabilizzatore è
scelto in modo che la deflessione dell’equilibratore sia nulla in crociera.
Infine riprendiamo i termini di downwash, e poniamo:

0ε = 0
αε
∂∂ = 0,52
Riprendiamo i risultati riguardanti il velivolo parziale con ipersostentatori deflessi. In
particolare ricordiamo i seguenti:
VPCAx = 0,2741
VPCAMc , = -0,3192
VP
lc
∂∂α
= 0,0843
In questa configurazione inoltre definiamo i seguenti parametri relativi al piano di coda
orizzontale:
MAcd = 5,7140
CSi = 11,03°
essendo d la distanza tra il centro aerodinamico del piano di coda orizzontale e il bordo
d’attacco della corda media aerodinamica (d = 97 ft); si è adottato un piano di coda a
calettamento variabile e non si è scelto un calettamento maggiore dello stabilizzatore per
evitare fenomeni di stallo dello stesso.
Infine riprendiamo i termini di downwash, e poniamo:
0ε = 0
αε
∂∂ = 0,52.
L’analisi di stabilità longitudinale a comandi bloccati ci porta a definire un limite posteriore
per il baricentro del velivolo. Tale limite posteriore coincide con il centro aerodinamico del
velivolo completo VCCAx . Calcoliamo pertanto la posizione del centro aerodinamico per
mezzo della formula:

( ) ( )
( ) ( )SS
cc
SS
cdcxc
xC
CCLVPL
C
CMACLVPCAVPL
VCCA
η
ηαε
αα
αα
+
∂∂
−+=
1
Risulta
VCCAx = 0,6291 per configurazione pulita
VCCAx = 0,5948 per configurazione ipersostentata
Questo valore mi garantisce “abbondantemente” che la posizione del baricentro più
arretrata sia dentro il margine imposto dalle normative.
Valutata perciò la posizione del centro aerodinamico tramite la (10), possiamo calcolare i
margini di stabilità nelle varie configurazioni. Si trova:
Configurazione pulita
VCCAx = 0,6291
AVCGVCCA xx − = 43,98%
ARCGVCCA xx − = 34,93%
Ipersostentatori estesi
VCCAx = 0,5948
AVCGVCCA xx − = 40,55%
ARCGVCCA xx − = 31,51%

Diagrammi del Crocco
Mettiamo ora in grafica i risultati ottenuti mediante i diagrammi del Crocco, sia per il
velivolo completo in configurazione pulita che con ipersostentatori deflessi. Precisiamo che
le isocline sono state ricavate per mezzo dell’equazione:
( ) ( )VCBAMMA
VPCAMA
VPLVPCAMMA
VCL cdc
xcdcc
dc
c ,, **
*−+
−+= αα
mentre le rette di barra hanno equazione:
( ) ( ) ( )VCBAMVCCA
CCVPCA
MACSCLVPCAM
VCCAVCL c
xSS
xcdicc
xc ,0,
1*1−+
−−++= ητδεα
Infine, le baricentriche sono rette di equazione:
( )VCBAMCG
VCL cx
c ,1
−=
Configurazione pulita
CL-VC = -0,039055 + 0,072837 α - 0,2134 CMba-VP
CL-VC = 0,358397 - 0,063491 α -1,58945 CMba-VP
CL-VC = -1,589451 CMba-VP

diagramma di Crocco
-1-0,8-0,6-0,4-0,2
00,20,40,60,8
11,21,41,61,8
22,22,42,62,8
3-1
-0,8
-0,6
-0,4
-0,2 0
0,2
0,4
0,6
0,8 1
1,2
1,4
-CM ba
CL
vc
baricentriche CL-VC
isoclina con angolo 0°
isoclina con angolo 10
isoclina con angolo20,658°retta di barra con delta 0
retta di barra con delta -10°
Ipersostentatori estesi
CL-VC = -0,06989 + 0,079239 α - 0,21893 CMba-VP
CL-VC = 0,30389 -0,066073 α -1,681076 CMba-VP
CL-VC = -1,681076 CMba-VP

diagramma di Crocco
-1-0,8-0,6-0,4-0,2
00,20,40,60,8
11,21,41,61,8
22,22,42,62,8
3-1
-0,8
-0,6
-0,4
-0,2 0
0,2
0,4
0,6
0,8 1
1,2
1,4
-CM ba
CL
vc
baricentriche CL-VC
isoclina con angolo 0°
isoclina con angolo 10
isoclina con angolo20,568°retta di barra con delta 0
retta di barra con delta -10°retta di barra con delta -25°
curva cL-α e polare del velivolo completo
Abbiamo ora tutto ciò che serve per valutare la curva di portanza e la polare del velivolo
completo in configurazione pulita, sia con il baricentro avanzato che arretrato. Per il
coefficiente di portanza si utilizzerà la relazione:
bac VCL
−=α
con
( )
−
−=
VPCAMA
VPL
VPCAM
xcdc
ca
*,
α

( )
−
−=
VPCAMA
VPL
CGMA
xcdc
xcd
b*
*
α
Si noti che la pendenza della retta di portanza per il velivolo completo vale
( )b
cVCL
1=α
Per quel che riguarda invece il coefficiente di resistenza si porrà:
SS
ccc CCCDiVPDVCD η+=
con
uc
c CLCDi πλ
2
=
e dove CLc è dato dalla
( )SScc
cCC
VPLVCLCL η
−=
Sottolineiamo infine che le curve di portanza vengono linearizzate, e come angolo
d’incidenza massimo si considera quello dato dal rapporto:
( )VPL
VPMAXLMAX c
c
α
α ,=
Graficando le seguenti equazioni:
per xCG=0,26
CLVC=0,077116 α + 0,04135

per xCG=0,18
CLVC=0,075747 α + 0,040616
per xCG=0,28
CLVC=0,077466 α + 0,041538
CL alfa velivolo completo
-0,5
0
0,5
1
1,5
2
-10 -5 0 5 10 15 20 25 30
alfa
CL
vc
0,180,280,26CL VP

Polare equilibrata
-0,5
0
0,5
1
1,5
2
0 0,02 0,04 0,06 0,08 0,1 0,12
CD
CL
0,260,180,38CDVP

STABILITA’ DI MANOVRA A COMANDI
BLOCCATI E A COMANDI LIBERI
stabilità di manovra a comandi bloccati
Nella trattazione del centraggio della stabilità statica longitudinale fin qui svolta, si è
costantemente assunto che il volo dell’aereo fosse orizzontale e stazionario, e si è potuto
constatare come, doti di stabilità a comandi liberi e a comandi bloccati comportino
rispettivamente, spostamenti all’indietro dalla barra per aumentare la portanza (e
viceversa) e sforzi di barra pure all’indietro per incrementare il CL (e viceversa).
L’ottenimento delle caratteristiche citate è di fondamentale importanza perché su di esse è
basata la capacità del pilota di “percepire” il modo di volere del velivolo.
Nel caso di volo accelerato (che viene ricondotto ai due casi di richiamata e virata corretta)
è altrettanto importante che il pilota possa avere, attraverso gli spostamenti della barra,
una precisa percezione delle accelerazioni cui è sottoposto l’aereo nell’esecuzione della
manovra:
• spostamenti e sforzi di barra troppo elevati possono rendere addirittura impossibili
le manovre in questione;
• spostamenti e sforzi di barra troppo esigui rendono difficoltosa la dosatura delle
azioni di governo, potendo giungere ad imporre all’aereo fattori di carico troppo
elevati.
Sotto l’ipotesi che le variazioni di velocità del velivolo siano solo in direzione e non in
modulo, e che quindi le accelerazioni cui il velivolo è sottoposto siano solo di tipo
centrifugo, si sono esaminate le due manovre di richiamata e virata corretta. L’essere in
manovra, rispetto alla condizione di VORU, provoca due effetti:
• dato che L = nQ, sarà ( )( )22 VSWnc VCL ρ=
• per effetto della velocità angolare di beccheggio q, l’incidenza dell’impennaggio
orizzontale risulta diminuita di un angolo Cα∆ , che vale:

( )Vxd
q CGC
−=∆α .
Per soddisfare la condizione di equilibrio dei momenti rispetto all’asse baricentrica di
beccheggio, vincendo appunto l’effetto di smorzamento conseguente alla velocità angolare
di beccheggio, è quindi necessario incrementare la deflessione dell’impennaggio di un
certo angolo Eδ∆ , che si ricava appunto imponendo che l’incremento di VCLc sia nullo.
Possiamo scrivere:
( ) ( ) ECLSCLCL ccc δα δα ∆+∆=∆ = 0 ⇒ τ
αδ 1SE ∆−=∆
inoltre questo incremento di deflessione si somma ad un termine che è quello classico di
centraggio del velivolo, ma valutato in corrispondenza di un VCLc che è pari ad n volte
quello di VORU.
Risulta quindi in caso di manovra
EVCLE fce δδ ∆++=
essendo e ed f due coefficienti che ci hanno consentito di risolvere il problema del
trimmaggio nel capitolo precedente (vedi appunti teoria). f, in particolare, dipende dalla
posizione del baricentro.
L’espressione scritta è del tutto generale, e va specializzata alla manovra che si vuol
trattare. In genere, compare il fattore di carico al quale si sta compiendo la manovra, come
variabile. Derivando l’equazione rispetto al fattore di carico, otteniamo un indice molto
importante per valutare la stabilità di manovra a comandi bloccati: il gradiente di
deflessione dell’impennaggio orizzontale al variare del fattore di carico.
Ricaviamo per la richiamata:

( )2,
*1
V
lxldng CGE
rm τ
δδ
−−−
= ;
per la virata corretta:
2,
*1
V
lxld
nng CGE
vm τ
δδ
−
−−
= ;
Derivando le equazioni rispetto al fattore di carico n, dopo aver sostituito le espressioni per
e per f, si ottiene:
per la richiamata:
( )( ) 22
*
2V
lxldg
VSWf
n
CG
r
E
τρδ
−
−=
∂∂
per la virata corretta:
( )( ) 2
2
2
1*
2V
nnlx
ldg
VSWf
n
CG
r
E
τρδ
−
−
−=
∂∂
Uguagliando le equazioni a zero, e risolvendo rispetto alla posizione del baricentro, si
ottengono le condizioni di centraggio che rendono nulle le due derivate. Queste condizioni
sono assolutamente indesiderabili, in quanto per esse possono verificarsi anche vistosi
incrementi del fattore di carico, senza che la deflessione dell’impennaggio debba variare e
potendo quindi giungere alla rottura dell’aereo in volo senza che il pilota agisca in alcun
modo sui comandi. Queste condizioni di centraggio prendono il nome di PUNTI NEUTRI
DI MANOVRA A COMANDI BLOCCATI (ce n’è uno per ogni manovra).
Richiamata a quota z = 0 m e con il carico alare massimo

CM-α CG VP= -0,0529 + 0,08419XCG
f = -20,406 + 32,4736XCG
∂δ/∂n = -1,0763 + 1,702XCG
XPNMCB,R = 0,6323
-80
-70
-60
-50
-40
-30
-20
-10
00 100 200 300 400 500
Velocità
Gra
dien
te d
i def
less
ione
Richiamata a quota di crociera e con il carico alare medio
CM-α CG VP = -0,0529+0,08419XCG
f = -20,406 + 32,4736XCG
∂δ/∂n = -1,0025 + 1,5853XCG
XPNMCB,R= 0,6323

ddelt/den
-90-80-70-60-50-40-30-20-10
00 100 200 300 400 500
Velocità
Gra
dien
te d
i fle
ssio
ne
stabilità di manovra a comandi liberi
Nella trattazione a comandi liberi, si valuta lo sforzo di barra che il pilota deve applicare
per effettuare una manovra ad un assegnato valore del fattore di carico. Eguaglio il lavoro
del momento sull’equilibratore al lavoro effettuato dal pilota per muovere la barra,
considerando i valori medi:
δCMFs =
Definendo il rapporto di trasmissione ( skt δ= ), ottengo:
hmmC
tC clSVkMs
F
== 2
21 ρδ
In particolare, considerando la variazione di forza rispetto al VORU da applicare per
effettuare la manovra, ricavo la seguente relazione:
( )EhShmmt cclSVkF δαρ δα ∆+∆=∆ 2
21
In questa espressione gli incrementi di deflessione dell’equilibratore e di incidenza che
servono per effettuare la manovra, sono dati dalla somma di due termini:

• per quanto riguarda Eδ∆ , un primo incremento di deflessione dell’equilibratore, è
tale da consentire l’equilibrio dei momenti ad un Lc più elevato di n volte, rispetto a
quello corrispondente alle condizioni di VORU alla medesima velocità; un secondo
contributo serve per bilanciare l’effetto della variazione d’incidenza della coda,
conseguente alla rotazione del velivolo attorno all’asse di beccheggio con una
velocità angolare q;
• per quanto riguarda Sα∆ , un primo termine rappresenta la variazione d’incidenza
del velivolo per passare dal Lc che si aveva nel volo orizzontale rettilineo uniforme,
ad uno n volte maggiore; il secondo termine è invece dovuto alla rotazione del
velivolo con velocità angolare q.
Omettendo i passaggi intermedi otteniamo la formula proposta a lezione:
µηα
kVCCMAdxx hCVCLnm +=
e sostituendo i valori per il nostro velivolo in condizioni di VORU abbiamo:
xn = 0,2468
Come possiamo notare xn<xm e questo vuol dire che in VORU il velivolo è stabile
Sforzi di barra
Per il calcolo degli sforzi di barra applichiamo una formula data a lezione.
)(12 BCAC
VnCSqKF nnmmCTT δα +−
=
con:
CMAgKXCMAd
SQ
CA CG
L
−+
∂∂
−=− α
ερα
121
CMAgKXCMAd
SQfB CG
−−=
τρ12
con i nostri valori otteniamo:

FT = 693 N
Come potevamo prevedere, senza servosistemi il velivolo non può essere pilotato. La
forza richiesta sarebbe troppa per una persona capace di tirare “solo” 30 kg per braccio.

STABILITA’ LATERO - DIREZIONALE
introduzione
Mentre la presenza di un piano di simmetria permette lo studio della stabilità longitudinale
del velivolo in assetti simmetrici indipendentemente da quella laterale (attorno all’asse di
rollio) e direzionale (attorno all’asse d’imbardata), lo studio di queste, a rigore, non può
essere separato, in quanto in genere, ad ogni rollata corrisponde un’imbardata ed una
derapata; ad ogni derapata una rollata e un’imbardata; indipendentemente dalla causa che
abbia provocato la rollata, la derapata o l’imbardata iniziale.
La stabilità direzionale, cioè la stabilità dell’equilibrio alla rotazione attorno all’asse Z (asse
principale d’inerzia d’imbardata, positivo se diretto verso il basso), è nei velivoli ad
architettura classica assicurata dall’impennaggio verticale che consta di una parte fissa
(deriva) e di una parte mobile (timone). Quest’ultimo ha la funzione specifica di assicurare
la manovrabilità direzionale, cioè la possibilità di impedire o di provocare la rotazione del
velivolo attorno all’asse Z, mentre alla deriva è demandato il compito di assicurare la
stabilità.
La stabilità direzionale, seppure non necessaria al volo in modo assoluto come quella
longitudinale, è altamente desiderabile, per non obbligare il pilota ad intervenire
continuamente sui comandi per correggere le deviazioni del velivolo dalla rotta prescelta.
La manovrabilità direzionale è poi indispensabile per dare al pilota la possibilità di
effettuare variazioni o correzioni della direzione della traiettoria, nonché di compiere
manovre (virata) o di mantenere l’equilibrio in particolari condizioni (vento laterale, volo
con trazione asimmetrica,ecc…).
E’ bene notare che i moti attorno all’asse X (rollio) e Z (imbardata) non sono indipendenti,
ma ad ogni rollata corrisponde un’imbardata per annullare la quale occorre intervenire
sugli organi di governo direzionale, e viceversa. In questo capitolo però supporremo che i
momenti di rollio che si generano in seguito ad un’imbardata siano annullati istante per
istante da un’opportuna manovra degli alettoni, contemporanea a quella del timone di
direzione, e che la manovra degli alettoni abbia un’influenza trascurabile sui momenti
imbardanti, onde non complicare eccessivamente la trattazione.

indice di stabilità direzionale
La stabilità direzionale del velivolo è quella caratteristica che si manifesta quando l’aereo,
per effetto di una qualunque causa perturbatrice, non vola più mantenendo il proprio asse
di simmetria tangente al vettore velocità del suo baricentro, ma assume un assetto deviato
caratterizzato da un angolo di derapata β .
Convenzioni: la terna di assi corpo è una terna destra principale baricentrica:
• l’asse longitudinale X (rollio) appartiene al piano di simmetria del velivolo ed è
positivo se diretto verso il muso del velivolo;
• l’asse Y (beccheggio) è diretto perpendicolarmente al piano di simmetria del
velivolo ed è positivo se diretto verso la semi ala destra;
• l’asse Z (imbardata) appartiene al piano di simmetria del velivolo e forma con gli
altri due una terna destra.
• Forze e spostamenti sono positivi se diretti come gli assi in questione.
• I momenti (attorno a ciascuno dei tre assi) sono positivi se seguono la regola della
mano destra.
Quando il velivolo è investito da un vento relativo diretto come in figura la risultante delle
forze aerodinamiche non giace più nel piano di simmetria del velivolo ma ammette una
componente normale al piano X-Z oltre alle due componenti secondo gli assi X e Z.
β
V

Al momento di beccheggio quindi si aggiungono in generale un momento di rollio dovuto
principalmente alla presenza di un diedro alare ed un momento imbardante attorno
all’asse Z.
E’ questo che interessa soprattutto nello studio della stabilità direzionale.
Per valore nullo dell’angolo di derapata , data la simmetria aerodinamica del velivolo, il
momento imbardante ha generalmente valore nullo, sicché la condizione 0=N è
automaticamente soddisfatta (detto N per l’appunto il momento imbardante).
Se si scosta il velivolo da tale posizione di equilibrio, nasce in generale un momento
imbardante, funzione di β . Si dirà che il velivolo possiede una stabilità direzionale se tale
momento tende a ricondurlo nella condizione di equilibrio iniziale. Ciò equivale a dire con
le convenzioni adottate che un velivolo è stabile direzionalmente se
0<
∂∂βN
E’ possibile in prima approssimazione valutare le caratteristiche di stabilità direzionale di
un velivolo considerando separatamente i vari elementi e poi sommandoli (cercando di
tenerne in conto ove possibile i fenomeni di interferenza), analogamente a quanto fatto per
la stabilità longitudinale. Passando poi dal momento N al relativo coefficiente Cn definito
da :
SbV
NCn2
21 ρ
=
il criterio di stabilità diviene:
0, <=
∂∂ ββ
CnCn
La quantità βnC , prende il nome di indice di stabilità direzionale.

E’ possibile, in prima approssimazione valutare le caratteristiche di stabilità direzionale di
un velivolo, considerando separatamente i vari elementi e poi sommandoli (cercando di
tenere in conto, se possibile, i fenomeni d’interferenza), analogamente a quanto fatto per
la stabilità longitudinale. Occorre quindi esaminare separatamente i vari contributi.
contributo dell’ala
Il contributo dell’ala è di entità relativamente piccola. Esso dipende soprattutto dall’angolo
di freccia, il cui effetto si può intuire osservando che al crescere dell’angolo di derapata (o
deriva) la semi ala che arretra viene a presentare al vento relativo una superficie frontale
minore della semi ala che avanza. Angoli con freccia positiva sono quindi stabili. Una
valutazione di prima approssimazione è data da:
alaCn β, = -0.00012 Λ
dove Λ espresso in radianti è l’angolo di freccia espresso in gradi, e misurato tra la
normale al piano di simmetria del velivolo e l’asse focale dell’ala, che nel nostro caso vale
30°.
Da cui alaCn β, = -0,00032
contributo della fusoliera
fusCn β, = 312
21
3,5796,0
bfbf
HfHf
bSLfSfK
dove:
Sf = 384,45 m2 superficie laterale della fusoliera
Lf = 63,7032 m lunghezza della fusoliera
S = 445,93 m2 superficie alare
b = 64,6176 m apertura alare
1Hf = 6,096 m altezza della fusoliera al 25% di Lf

2Hf = 5,7912 m altezza della fusoliera al 75% di Lf
1bf = 6,096 m larghezza della fusoliera al 25% di Lf
2bf = 5,7912 m larghezza della fusoliera al 75% di Lf
Inoltre il coefficiente K è definito dalla seguente relazione:
105,075,0max3,0 −⋅+=Lf
HfLfLcgK
dove:
maxHf = 6,096 m altezza massima della fusoliera
Lcg = 29,87 m distanza del baricentro limite posteriore dal naso della
fusoliera
Sostituendo i valori del mio velivolo si ottiene K = 0,10744 da cui
fusCn β, = 0,001649
Commento:
β,Cn è positivo, questo significa che la fusoliera ha contributo instabilizzante dal punto di
vista della stabilità latero direzionale. il coefficiente K dipendendo dalla distanza del
baricentro limite posteriore dal naso del velivolo vuole evidentemente tener conto
dell’effetto di interferenza tra ala e fusoliera, effetto che è funzione della posizione mutua
delle due parti in senso longitudinale. Il β,Cn del complesso ala + fusoliera è diverso dalla
somma dei due contributi calcolati finora e tale differenza è generalmente in senso
favorevole, cioè stabilizzante. Per tener conto, oltre che della posizione longitudinale,
anche della posizione in altezza dell’ala rispetto alla fusoliera il Perkins suggerisce la
seguente correzione da apportare alla somma dei due contributi:
ala alta β,Cn∆ = -0,0002
ala media β,Cn∆ = -0,0001
ala bassa β,Cn∆ = 0

Nel nostro caso, avendo assunto un’ala bassa per il velivolo, non devo apportare alcuna
correzione.
contributo delle gondole
Il contributo della singola gondola si valuta con il medesimo procedimento seguito per la
fusoliera:
gonCn β, = 312
21
3,5796,0
bgbg
HgHg
bSLgSgK
dove:
Sg = 21,572 m2 superficie laterale della gondola
Lg = 7,8638 m lunghezza della gondola
S = 445,93 m2 superficie alare
b = 64,6176 m apertura alare
1Hg = 3,81 m altezza della gondola al 25% di Lg
2Hg = 1,6764 m altezza della gondola al 75% di Lg
1bg = 3,81 m larghezza della gondola al 25% di Lg
2bg = 1,6764 m larghezza della gondola al 75% di Lg
Inoltre il coefficiente K è definito dalla seguente relazione:
105,075,0max3,0 −⋅+=Lg
HgLgLcgK
dove:
maxHg = 3,81 m altezza massima della fusoliera
Lcg = 23,77 m distanza del baricentro limite posteriore dal naso della
gondola

Sostituendo i valori del mio velivolo si ottiene K = 1,1653 da cui
gonCn β, = 0,000207
A questo punto basta moltiplicare per due il contributo della singola gondola per ottenere
gontotCn β, = 0,000414
Commento:
il coefficiente K dipendendo dalla distanza del baricentro limite posteriore dal naso delle
gondole vuole evidentemente tener conto dell’effetto di interferenza tra ala e gondola,
effetto che è funzione della posizione mutua delle due parti in senso longitudinale.
Adesso ci accorgiamo che la somma dei tre termini (ala, fusoliera, gondola) fin qui ricavati
è positiva, cioè un velivolo con architettura tradizionale ha un’intrinseca stabilità statica
direzionale che rende necessaria l’aggiunta di una superficie stabilizzante, e ciò non solo
per compensare l’instabilità delle altre parti, ma anche per dare al velivolo il grado di
stabilità/controllabilità desiderato. Il velivolo completo presenterà quindi anche uno
impennaggio verticale, posto dietro il baricentro del velivolo e quanto più possibile lontano
da esso. Il contributo dell’impennaggio orizzontale può essere valutato in due distinte
condizioni: si può ragionare a comandi bloccati, cioè si suppone il timone solidale alla
deriva oppure a comandi liberi, cioè si suppone che il timone possa ruotare attorno al suo
asse di cerniera, libero di assumere la sua posizione di equilibrio sotto l’azione del vento
relativo.
Il piano di coda verticale
Corda media aerodinamica
Già nei capitoli precedenti avevo calcolato le caratteristiche geometriche del piano di coda
orizzontale:
croot = 25,5 ft
ctip = 10,2 ft

Λ = 45°
Sh = 571 ft2
b = 32 ft
L’andamento della corda aerodinamica lungo l’altezza è:
c(y) = -0,4781 y +25,5
La corda media aerodinamica vale :
( )∫=2b
0
2 dxxc2S
1CMA
ottenendo per il piano di coda il valore:
CMAtail = 18,94 ft
Come per l’ala, calcolo la posizione del bordo d’attacco della corda media
aerodinamica dei piani di coda orizzontali:
2/S
dy)y(c)y(xx
2/b
0ba
CMA,ba
∫ ⋅=
Integrando :
xbaCMA-tail = 13,714 ft
Il contributo del piano verticale di coda si calcola quindi con la formula sottoportata nel
caso di considerare i comandi del timone liberi.
∂∂
∆+
∂∂
−=
∂∂
βη
αβn
cvvL
v
n CSblSCC
2
ed il coefficiente che compare per ultimo è pari a -0,003.

Abbiamo così che il contributo risulta essere pari a:
timonetotCn β, = -0,000556
Allora abbiamo che:
TOTCn β, = -0,00382
Controllabilità latero-direzionale in caso di piantata
motore
Si rende necessaria la possibilità di allineamento del velivolo in caso di piantata del
motore. Il momento attorno all’asse di imbardata dovuto alla spinta asimmetrica deve
quindi essere equilibrato dal momento generato dalla forza aerodinamica agente sul piano
di coda verticale per una deflessione del timone inferiore o al limite uguale a quella
massima.
Yv= V
V
2
21 ρ VS V
V
Cl δδ
∂∂ =
2
21 Vρ Vη VS τ V
V
Cl δα
∂∂
Nv = Yv * Xv momento imbardante dovuto alla manovra del timone
aT ⋅ momento imbardante dovuto all’asimmetria di trazione
Deve quindi essere verificata la seguente disuguaglianza:
aT ⋅ ≤
2
21 Vρ Vη VS τ V
V
Cl δα
∂∂
da cui si ricava:

Vδ ≥XvClSV
aT
VVV
∂∂
⋅
ατηρ 2
21
La condizione più critica risulta essere la riattaccata in fase di avvicinamento. In tal caso la
velocità assume il valore della velocità di avvicinamento pari a VsfoV *3,1= e la spinta
disponibile è pari alla massima possibile (con un motore). abbiamo già indicato in
precedenza tutti i parametri necessari al calcolo, dobbiamo ricordare solo il braccio della
trazione che è pari a a = 1,628 m . Sostituendo le quantità necessarie al calcolo nella
relazione otteniamo l’escursione angolare del timone in caso di piantata del motore:
Vδ ≥ 18,04°
Ed è un valore accettabile, in quanto deve essere minore di 20°
Controllabilità latero-direzionale in caso di vento
laterale
Anche in questo caso si rende necessaria la possibilità di allineamento del velivolo in caso
di vento laterale. Il momento attorno all’asse di imbardata dovuto alla spinta asimmetrica
deve quindi essere equilibrato dal momento generato dalla forza aerodinamica agente sul
piano di coda verticale per una deflessione del timone inferiore o al limite uguale a quella
massima.
Abbiamo da applicare la formula:
lSqCTl
vvL
TV
βτδ =
con CLβ ricavato con la formula del Raymer:
( )( )
++Γ
−=λλα
β 13212
4L
LC
C = 0,000264
Assumendo un angolo beta pari a 30°, otteniamo così il valore:
Vδ ≥ -29,15°