Embed Size (px)
Citation preview

Actas de las XXXV Jornadas de Automática, 3-5 de septiembre de 2014, ValenciaISBN-13: 978-84-697-0589-6 © 2014 Comité Español de Automática de la IFAC (CEA-IFAC)
Estudio de la navegacion de un planeador autonomo submarino
Gimenez Martınez, J.∗, Loeff, E.∗, Garcıa Moreno, E.†
Resumen
En este artıculo se presentara el conjunto de un sis-tema de navegacion para un Planeador AutonomoSubmarino (PAS). Para ello hay 2 sistemas princi-pales; primero esta el actuador, que en el caso deun PAS es un variador de flotabilidad, ya que unPAS no lleva motor pero utiliza fundamentalmentelos deslizamientos descendentes y ascendentes paramoverse, y en segundo lugar esta el sistema de posi-cionamiento, que suele consistir de un modulo GPSpara determinar la posicion del PAS cuando salga ala superficie. Para este trabajo se ha estudiado difer-entes formas de variacion de flotabilidad y en vez desolamente la determinacion de la posicion medianteGPS, incorporar una Unidad de Medicion Inercial(UMI) para la navegacion bajo el agua, puesto quela forma principal de navegacion del PAS es por es-tima, y el GPS solo actuara para corregir la posicioncuando se encuentre en la superficie.
Palabras clave: Planeador Autonomo Submarino,Flotabilidad, Estudio comparativo, Unidad deMedicion Inercial, piston simple.
1 Introduccion
Igual que un planeador aereo, que se mueve por elaire sin motor, el Planeador Autonomo Submarino(PAS) se mueve por el agua sin propulsion propia.Utiliza la variacion de la flotabilidad para moversepor el agua verticalmente, y con ayuda de unas alas,aprovecha la componente de avance horizontal de losmovimientos de deslizamiento. Cambiando el bal-
∗Estudiantes del Master Universitario en Sensorespara Aplicaciones Industriales, Escuela Tecnica Supe-rior de Ingenierıa del Diseno, Universitat Politecnica deValencia, Camino de Vera S/N, 46022 Valencia, Espana.Email: [email protected], [email protected]
† Departamento de Ingenierıa de Sistemas y Au-tomatica, Universitat Politecnica de Valencia, Caminode Vera S/N, 46022 Valencia, EspanaEmail: [email protected]
asto y moviendo el angulo de las alas, permite unamayor movilidad. Ası describio Henry Stommel elSlocum[6] en 1989 en la revista cientıfica Oceanog-raphy y introdujo ası el termino al la comunidadoceanografica.
En el ano 2005, no solamente se habıa mostrado elfuncionamiento del modelo de Stommel, basada enla energıa termica (Slocum Thermal) por Webb Re-search, tambien fueron desarrollados otros PAS porotras instituciones con una autonomıa y una eficien-cia impresionante. El Seaglider [1] de la Universidadde Washington y el Spray [5] de Scripps Institutionof Oceanography son unos ejemplos de ellos.
2 Flotabilidad
2.1 Teorıa
Variando la relacion peso/volumen de un cuerpo, sepuede variar la flotabilidad de este, resultando enuna flotabilidad positiva, negativa o neutra. Puesbien centrandonos en nuestro problema, cuandotengamos el tanque de lastre lleno, decimos quetenemos una flotabilidad negativa (el PAS estasumergiendose), en el momento en que el tanque delastre este vacıo, tendremos una flotabilidad positiva(PAS ascendiendo hacia la superficie o en la superfi-cie). Para ellos podemos ver distintos metodos queseran comentados a continuacion.
2.2 Metodos de control de flotabilidad
En la actualidad, existen diversos metodos para elcontrol de la flotabilidad, pero son dos los escogidosa priori para nuestro PAS.
Bomba hidraulica
Este sistema [4] consta de un deposito de aceite con-tenido en el casco de presion (VBT:Tanque de lastrevariable) y el vejiga del aceite se muestra en la figura1.

Actas de las XXXV Jornadas de Automática, 3-5 de septiembre de 2014, ValenciaISBN-13: 978-84-697-0589-6 © 2014 Comité Español de Automática de la IFAC (CEA-IFAC)
Figura 1: Ejemplo de un tanque de lastre variable
La figura 2 muestra de una manera muy grafica estesistema, en un primer momento el PAS se encuentraen la superficie, y para comenzar el descenso es de-cir, flotabilidad negativa, en ese momento el aceitese esta moviendo del VBT a la vejiga y por tanto elPAS esta descendiendo, una vez la vejiga esta com-pletamente llena, es decir el PAS se ha sumergido350 metros, comienza el proceso inverso, es decirla bomba que movıa el aceite desde la VBT a lavejiga, invierte su polaridad y ahora mueve al sen-tido contrario desde la vejiga al VBT logrando unaflotabilidad negativa y que el PAS ascienda a la su-perficie, Es decir, la funcion de la vejiga es la de ex-pulsar agua o coger agua, cuando este comience lainmersion la bomba movera el aceite hacia el tanquefijo, la vejiga comenzara a contraerse dejando entraragua en el interior consiguiendo ası la inmersion delmismo y cuando el PAS requiera expulsar esa aguapara ascender, la bomba movera el aceite hacıa lavejiga, inflandola y expulsando el agua, con lo cualeste comenzara a ascender. Cabe destacar que elPAS, no desciende sin control hacia el fondo marinosino, esta programado para mantener una distanciade seguridad sobre el fondo marino.
Piston de un solo efecto
Este sistema pasa por ser el mas sencillo de los dospero por el contrario de lo que pueda parecer esel menos practico, pero esto lo discutiremos en el
Figura 2: Movimiento del PAS
apartado de conclusiones.
Este sistema consta de, un cilindro de simple efecto yun motor. En primer lugar el motor gira y hace girarel elemento de tornillo sin fin situado en su eje. Esteelemento, a su vez esta en contacto con los dientes deun engranaje situado en el eje donde se encuentrael sistema pinon cremallera. Al girar el elementotornillo sin fin, gira todo el eje y convertimos unmovimiento angular en un movimiento longitudinal.Como vemos, este simple sistema de transmision demovimiento permite pasar del movimiento angularproveniente del motor al movimiento transversal de-seado para el movimiento del piston.
Figura 3: Llenado del tanque de lastre
Como podemos observar en la figura 3, el giro delmotor hace mover todo el sistema de engranajes,con ellos movemos el piston de manera que se llenade agua el tanque de lastre situado en la cabeza delPAS, logrando ası flotabilidad negativa, es decir, elPAS comienza su inmersion.
Por otro lado si se quiere ascender el PAS, el motor
Actas de las XXXV Jornadas de Automática, 3-5 de septiembre de 2014, ValenciaISBN-13: 978-84-697-0589-6 © 2014 Comité Español de Automática de la IFAC (CEA-IFAC)
se pone en marcha pero como en el caso anteriorinvirtiendo su polaridad, de esa manera expulsa elpiston, expulsa el agua del tanque de lastre, y lograascender, obteniendo flotabilidad positiva.
2.3 Especificaciones tecnicas de cadametodo
Para el estudio de la bomba hidraulica mas ade-cuada, hemos escogido los siguientes modelos, am-bos dos modelos del fabricante aleman HAWE, quetras hacer un estudio de mercado, este fabricante,era el que mejor se ajusta nuestras expectativas cal-idad/precio. Este tipo de bombas compactas con-stan de una carcasa (tanque) con motor integrado ybomba, de manera que en un mismo sistema incor-poramos dos equipos.
Opcion A: NPC 11
Caracterısticas tecnicas:Tipo de bomba: bomba de pistones radiales o deengranajesPresion maxima (Pmax): 750 barCaudal maximo (Qmax): 1.36 l/mTension nominal: 12VDC/24VDCPotencia nominal: 0.1/0.3 kWPeso: 6 kg
Figura 4: Bomba NPC 11
Opcion B: K60m Bomba De pistones axialesy caudal fijo
Caracterısticas tecnicas: Tipo de bomba: bomba depistones radiales o de engranajes Presion maxima(Pmax): 400 barCaudal maximo (Qmax, 500 rpm):5,8 l/mCaudal maximo (Qmax, 1000 rpm):12 l/mCaudal maximo (Qmax, 1500 rpm):18,3 l/mTension nominal: 12VDC/24VDCPotencia nominal: 12WPeso: 8.1 kg
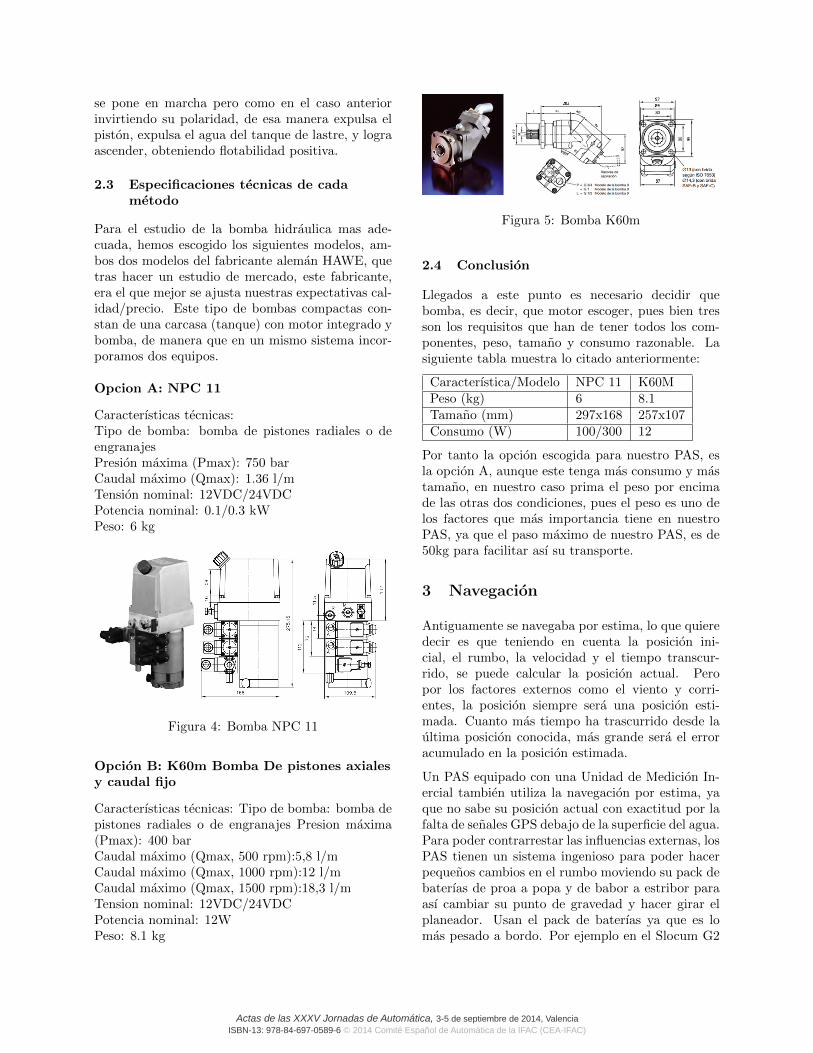
Figura 5: Bomba K60m
2.4 Conclusion
Llegados a este punto es necesario decidir quebomba, es decir, que motor escoger, pues bien tresson los requisitos que han de tener todos los com-ponentes, peso, tamano y consumo razonable. Lasiguiente tabla muestra lo citado anteriormente:
Caracterıstica/Modelo NPC 11 K60MPeso (kg) 6 8.1Tamano (mm) 297x168 257x107Consumo (W) 100/300 12
Por tanto la opcion escogida para nuestro PAS, esla opcion A, aunque este tenga mas consumo y mastamano, en nuestro caso prima el peso por encimade las otras dos condiciones, pues el peso es uno delos factores que mas importancia tiene en nuestroPAS, ya que el paso maximo de nuestro PAS, es de50kg para facilitar ası su transporte.
3 Navegacion
Antiguamente se navegaba por estima, lo que quieredecir es que teniendo en cuenta la posicion ini-cial, el rumbo, la velocidad y el tiempo transcur-rido, se puede calcular la posicion actual. Peropor los factores externos como el viento y corri-entes, la posicion siempre sera una posicion esti-mada. Cuanto mas tiempo ha trascurrido desde laultima posicion conocida, mas grande sera el erroracumulado en la posicion estimada.
Un PAS equipado con una Unidad de Medicion In-ercial tambien utiliza la navegacion por estima, yaque no sabe su posicion actual con exactitud por lafalta de senales GPS debajo de la superficie del agua.Para poder contrarrestar las influencias externas, losPAS tienen un sistema ingenioso para poder hacerpequenos cambios en el rumbo moviendo su pack debaterıas de proa a popa y de babor a estribor paraası cambiar su punto de gravedad y hacer girar elplaneador. Usan el pack de baterıas ya que es lomas pesado a bordo. Por ejemplo en el Slocum G2
Actas de las XXXV Jornadas de Automática, 3-5 de septiembre de 2014, ValenciaISBN-13: 978-84-697-0589-6 © 2014 Comité Español de Automática de la IFAC (CEA-IFAC)
Glider las baterıas representan una tercera parte delpeso total de 54kg, por tanto en el presente apartadose van a estudiar diferentes opciones para la nave-gacion submarina del PAS, con el objetivo de selec-cionar el sensor mas adecuado para la navegacionsubmarina del mismo.
3.1 Medidas inerciales
Una Unidad de Medicion Inercial o UMI, es undispositivo electronico que mide e informa sobrela velocidad de una nave, la orientacion y lasfuerzas gravitacionales, utilizando una combinacionde acelerometros y giroscopios, y a veces mag-netometros tambien. Una UMI se utiliza normal-mente para maniobrar una aeronave, incluidos losvehıculos aereos no tripulados (UAVs), entre mu-chos otros, naves espaciales, incluidos los satelitesy los aterrizadores. Una UMI permite a sistemade posicionamiento trabajar cuando las senales GPSno estan disponibles, como por ejemplo en tuneles,dentro de los edificios, o cuando hay interferen-cia electronica presente. Debajo del agua tampocohay disponibilidad de una senal GPS. Gernot[3] en-contro experimentalmente que una pelıcula de sola-mente 1mm de agua ya resulta en una atenuacionde la senal GPS de 9.4 dB. Por ello una Unidadde Medicion Inercial sera una adicion ideal para unPlaneador Autonomo Submarino.
Una unidad de medicion inercial funciona de-tectando la velocidad actual de aceleracion uti-lizando uno o mas acelerometros, y detecta cambiosen los atributos de rotacion como el cabeceo, bal-anceo y guinada usando uno o mas giroscopios.
Los sistemas de navegacion inercial contienenUnidades de Medicion Inerciales que tieneacelerometros angulares y lineales (por cam-bios en la posicion); algunos UMI incluyen unelemento giroscopico (para mantener una referenciaangular absoluta).
Los acelerometros angulares miden como el vehıculoesta girando en el espacio. En general, hay por lomenos un sensor para cada uno de los tres ejes: elcabeceo (nariz hacia arriba y hacia abajo), guinada(nariz izquierda y derecha) y el guinada (giro alrede-dor del eje longitudinal).
Los acelerometros lineales miden aceleraciones nogravitacionales del vehıculo. Dado que puedemoverse en tres ejes (arriba y abajo, izquierday derecha, adelante y hacia atras), hay unacelerometro lineal para cada eje.
Un ordenador calcula continuamente la posicion ac-tual del vehıculo. En primer lugar, para cada uno delos seis grados de libertad (x, y, z y θx, θy y θz), seintegra en el tiempo la aceleracion detectada, juntocon una estimacion de la gravedad, para calcular lavelocidad actual. A continuacion se integra la ve-locidad para calcular la posicion actual.
Sistemas de orientacion inercial generalmente secombinan con los sistemas de navegacion por satelitea traves de un sistema de filtrado digital. El sis-tema inercial proporciona los datos a corto plazo,mientras que el sistema de satelites corrige erroresacumulados del sistema inercial.
3.1.1 Giroscopios
Un giroscopio es un dispositivo para medir o man-tener la orientacion y actitud, y funciona segun losprincipios del momento angular. El mas conocidoes el modelo clasico que aprovecha el principio derigidez giroscopica de un disco giratorio en un en-torno donde el eje es libre de asumir cualquier ori-entacion, pero desde entonces se han encontradomuchas formas de hacer giroscopios para una var-iedad amplia de productos. Se muestran algunos enla figura 6 ordenados por tamano y precision.
Figura 6: Tipos de giroscopios
La orientacion del dispositivo permanece casi fijo,con independencia del movimiento de la plataformade montaje, ya que montar el dispositivo en uncardan minimiza el par externo.
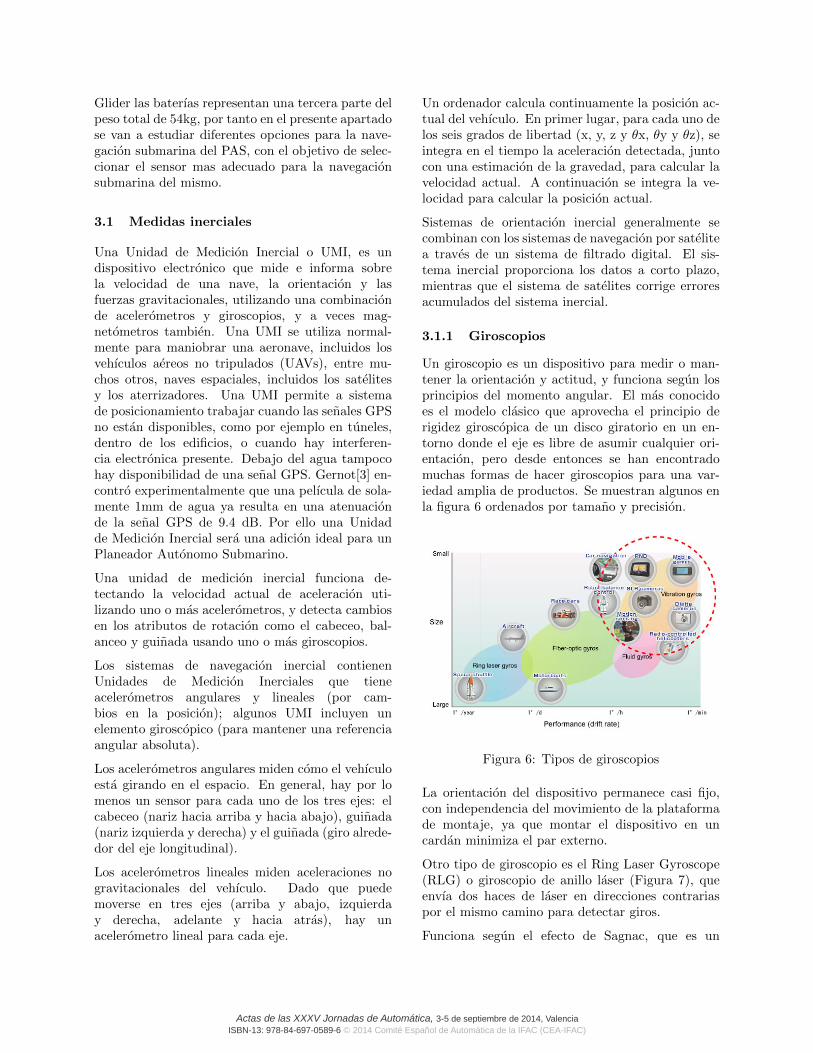
Otro tipo de giroscopio es el Ring Laser Gyroscope(RLG) o giroscopio de anillo laser (Figura 7), queenvıa dos haces de laser en direcciones contrariaspor el mismo camino para detectar giros.
Funciona segun el efecto de Sagnac, que es un
Actas de las XXXV Jornadas de Automática, 3-5 de septiembre de 2014, ValenciaISBN-13: 978-84-697-0589-6 © 2014 Comité Español de Automática de la IFAC (CEA-IFAC)
Transmitter
Receiver
Mirror Mirror
Mirror
Half Mirror
Figura 7: Funcionamiento de un RLG
fenomeno que se ha encontrado en interferometrıaque se produce por la rotacion. El efecto Sagnacse manifiesta en una configuracion llamada inter-ferometrıa de anillo. Un haz de luz se divide endos cada haz se hace seguir una trayectoria en di-recciones opuestas. Para actuar como un anillo, latrayectoria debe formar un anillo cerrado. Al volveral punto de entrada de los haces, se dejan salir delanillo de tal forma que se obtiene un patron de inter-ferencia. La posicion de las franjas de interferenciadepende de la velocidad angular de la instalacion.Esta disposicion tambien se llama un interferometrode Sagnac.
El efecto Sagnac es la contraparte electromagneticade un giroscopio mecanico. Sin embargo, los princip-ios subyacentes de los dos dispositivos son diferentes.Un giroscopio utiliza el principio de conservacion delmomento angular, mientras que el interferometro seve afectado por fenomenos relativistas.
El giroscopo de estructura vibrante es un tipo degiroscopio que funciona de manera similar a los hal-terios presentes en algunos insectos. El principiofısico subyacente es que un objeto vibrante tiendea continuar vibrando en el mismo plano que girasu apoyo. En la literatura de ingenierıa, este tipode dispositivos se conocen como ”giroscopio de vi-bracion de Coriolis”, debido a que a medida que elplano de oscilacion gira, la respuesta detectada porel transductor resulta del termino de Coriolis pre-sente en sus ecuaciones de movimiento (”fuerza deCoriolis”).
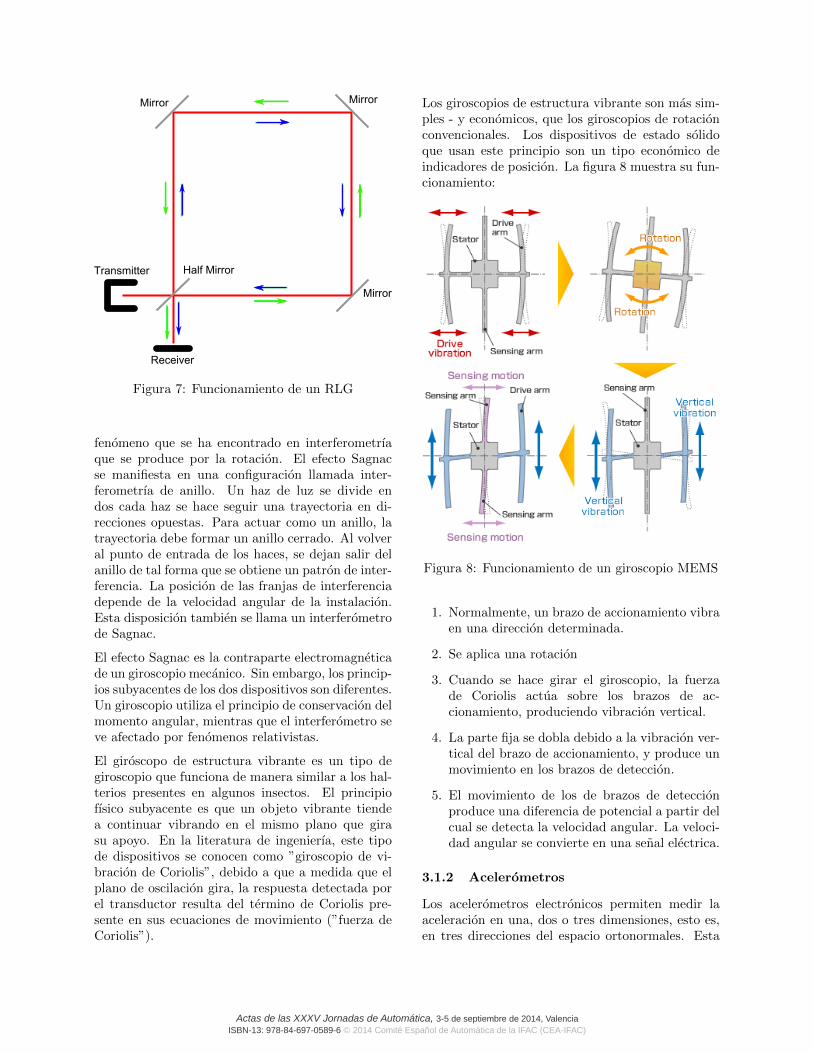
Los giroscopios de estructura vibrante son mas sim-ples - y economicos, que los giroscopios de rotacionconvencionales. Los dispositivos de estado solidoque usan este principio son un tipo economico deindicadores de posicion. La figura 8 muestra su fun-cionamiento:
Figura 8: Funcionamiento de un giroscopio MEMS
1. Normalmente, un brazo de accionamiento vibraen una direccion determinada.
2. Se aplica una rotacion
3. Cuando se hace girar el giroscopio, la fuerzade Coriolis actua sobre los brazos de ac-cionamiento, produciendo vibracion vertical.
4. La parte fija se dobla debido a la vibracion ver-tical del brazo de accionamiento, y produce unmovimiento en los brazos de deteccion.
5. El movimiento de los de brazos de deteccionproduce una diferencia de potencial a partir delcual se detecta la velocidad angular. La veloci-dad angular se convierte en una senal electrica.
3.1.2 Acelerometros
Los acelerometros electronicos permiten medir laaceleracion en una, dos o tres dimensiones, esto es,en tres direcciones del espacio ortonormales. Esta
Actas de las XXXV Jornadas de Automática, 3-5 de septiembre de 2014, ValenciaISBN-13: 978-84-697-0589-6 © 2014 Comité Español de Automática de la IFAC (CEA-IFAC)
caracterıstica permite medir la inclinacion de uncuerpo, puesto que es posible determinar con elacelerometro la componente de la aceleracion provo-cada por la gravedad que actua sobre el cuerpo.
Un acelerometro tambien es usado para determinarla posicion de un cuerpo, pues al conocerse su acel-eracion en todo momento, es posible calcular los de-splazamientos que tuvo. Considerando que se cono-cen la posicion y velocidad original del cuerpo bajoanalisis, y sumando los desplazamientos medidos sedetermina la posicion.
3.1.3 MEMS
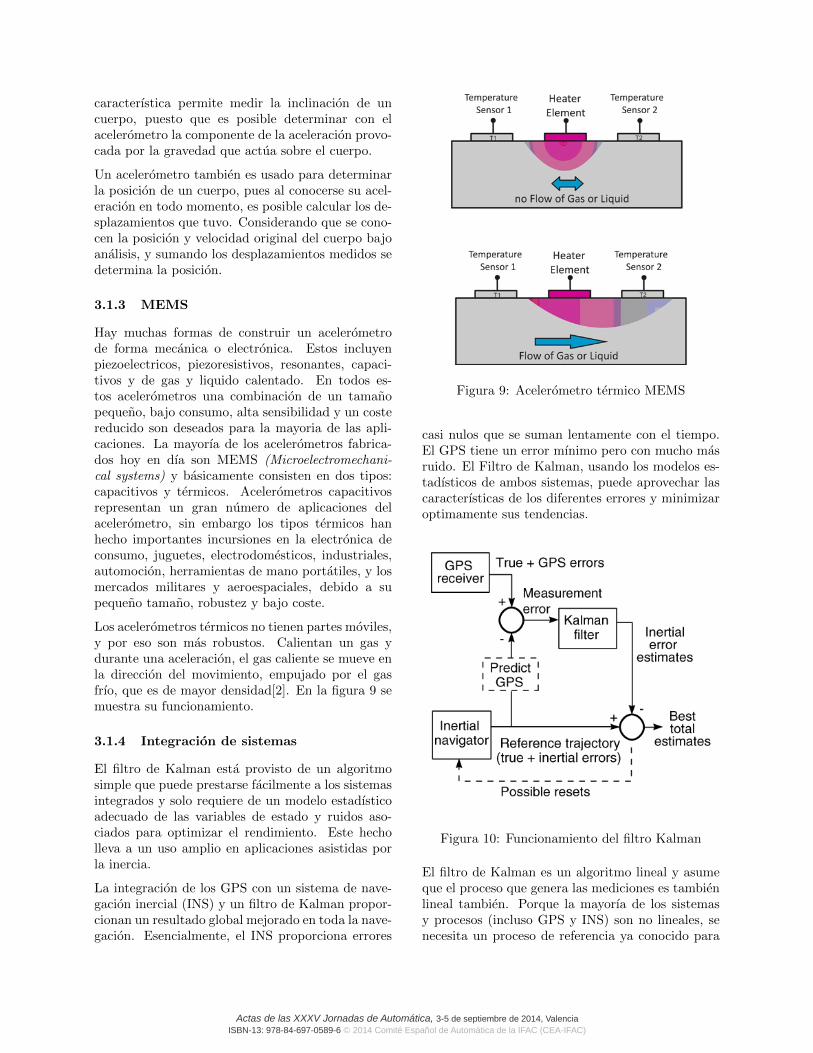
Hay muchas formas de construir un acelerometrode forma mecanica o electronica. Estos incluyenpiezoelectricos, piezoresistivos, resonantes, capaci-tivos y de gas y liquido calentado. En todos es-tos acelerometros una combinacion de un tamanopequeno, bajo consumo, alta sensibilidad y un costereducido son deseados para la mayoria de las apli-caciones. La mayorıa de los acelerometros fabrica-dos hoy en dıa son MEMS (Microelectromechani-cal systems) y basicamente consisten en dos tipos:capacitivos y termicos. Acelerometros capacitivosrepresentan un gran numero de aplicaciones delacelerometro, sin embargo los tipos termicos hanhecho importantes incursiones en la electronica deconsumo, juguetes, electrodomesticos, industriales,automocion, herramientas de mano portatiles, y losmercados militares y aeroespaciales, debido a supequeno tamano, robustez y bajo coste.
Los acelerometros termicos no tienen partes moviles,y por eso son mas robustos. Calientan un gas ydurante una aceleracion, el gas caliente se mueve enla direccion del movimiento, empujado por el gasfrıo, que es de mayor densidad[2]. En la figura 9 semuestra su funcionamiento.
3.1.4 Integracion de sistemas
El filtro de Kalman esta provisto de un algoritmosimple que puede prestarse facilmente a los sistemasintegrados y solo requiere de un modelo estadısticoadecuado de las variables de estado y ruidos aso-ciados para optimizar el rendimiento. Este hecholleva a un uso amplio en aplicaciones asistidas porla inercia.
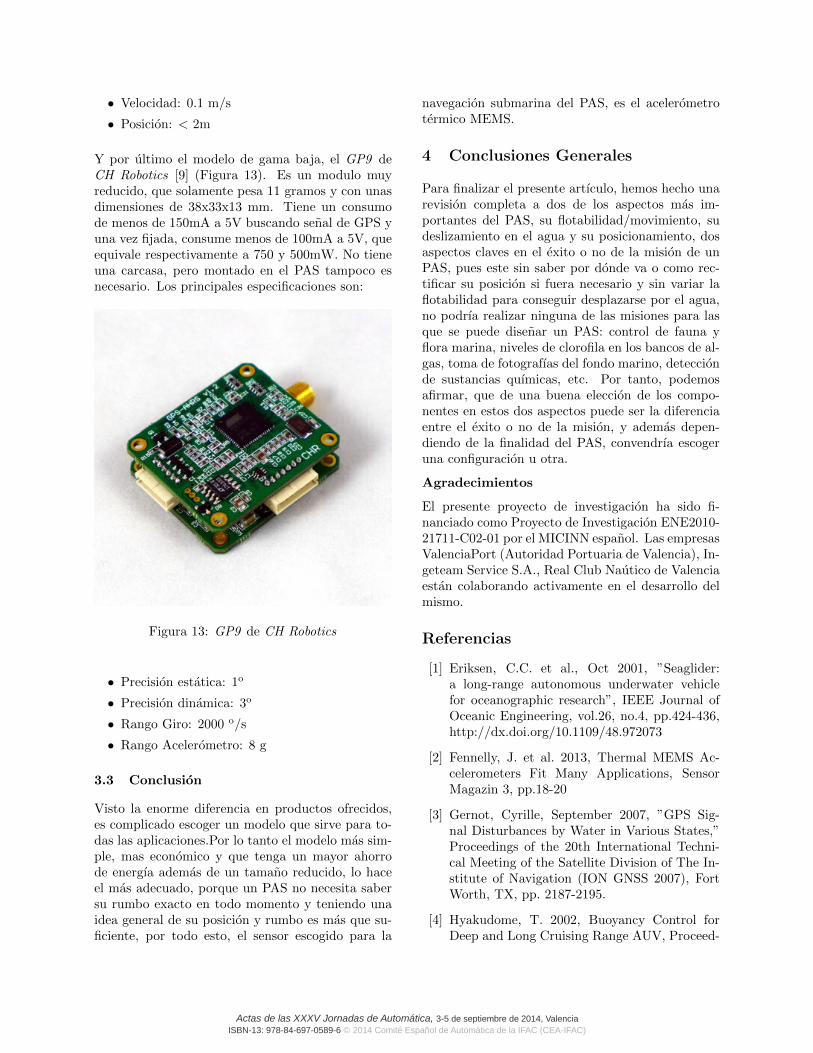
La integracion de los GPS con un sistema de nave-gacion inercial (INS) y un filtro de Kalman propor-cionan un resultado global mejorado en toda la nave-gacion. Esencialmente, el INS proporciona errores
Figura 9: Acelerometro termico MEMS
casi nulos que se suman lentamente con el tiempo.El GPS tiene un error mınimo pero con mucho masruido. El Filtro de Kalman, usando los modelos es-tadısticos de ambos sistemas, puede aprovechar lascaracterısticas de los diferentes errores y minimizaroptimamente sus tendencias.
Figura 10: Funcionamiento del filtro Kalman
El filtro de Kalman es un algoritmo lineal y asumeque el proceso que genera las mediciones es tambienlineal tambien. Porque la mayorıa de los sistemasy procesos (incluso GPS y INS) son no lineales, senecesita un proceso de referencia ya conocido para

Actas de las XXXV Jornadas de Automática, 3-5 de septiembre de 2014, ValenciaISBN-13: 978-84-697-0589-6 © 2014 Comité Español de Automática de la IFAC (CEA-IFAC)
utilizarlo como metodo de linealizacion.
La figura 10 ilustra la solucion para integrar GPSy navegadores inerciales. Note que los valores ver-daderos de cada sistema se cancelan mutuamentecuando se miden en el filtro Kalman en el que solo elGPS y los errores inerciales necesitan ser modelados.La trayectoria de referencia, se espera sea lo suficien-temente cercano a lo verdadero de tal forma que losmodelos de error sean lineales y el filtro Kalman seaoptimo. Para la mayorıa de las aplicaciones del GPSeste es el caso.
Hay 3 tipos de arquitectura para la integracionGPS/INS: Desacoplada, acoplamiento flexible yfuertemente acoplada. Ya que en este articulo esta-mos analizando las posibilidades para un PAS, quedurante la mayorıa del tiempo estara debajo de lasuperficie del agua, y sin recepcion GPS, la opcionmas adecuada sera la arquitectura desacoplada. Deesta forma solamente usa el GPS como dispositivoauxiliar para determinar su posicion en el momentoen que se encuentra en la superficie.
3.2 Comparacion
Existen una multitud de Unidades de Medidas In-erciales en el mercado. Cada uno con un metodode funcionamiento y precision, de 3, 6, 9 e incluso10 grados de libertad (GDL). Existen tantos queserıa imposible mostrarlos todos, por eso se haceuna comparacion de 3 tipos; una de alta gama (su-perior a 10k$), una de gama media (alrededor de5k$) y la ultima de gama baja (menos de 500$).
El UMI que se ha escogido de la gama alta es elSpatial FOG de Advanced Navigation[7] (Figura 11)que tiene unas dimensiones de 90x90x95 mm y unpeso de 665 gramos y combina un giroscopio de fibraoptica con 3 acelerometros, 3 magnetometros y GPSpara tener 10 grados de libertad. Su precio estimadoes de unos 35.000$. Su consumo es de 550mA a 12V,o sea 6.6 vatios.
Sus principales caracterısticas de precision son:
• Horizontal: 0.8m
• Vertical: 1.5m
• Horizontal(con SBAS): 0.5m
• Vertical(con SBAS): 0.8m
• Horizontal(con RTK): 0.008m
• Vertical(con RTK): 0.015m
• Velocidad: 0.007 m/s
Figura 11: Spatial FOG de Advances Navigation
• Balanceo y cabeceo: 0.01o
• Rumbo: 0.05o
El modelo de gama media es el IG-500N de SBGSystems[8] (Figura 12). Cuesta unos 3500$. Eneste caso contiene 3 giroscopios, 3 acelerometro, 3magnetometros un sensor de temperatura, un sen-sor de presion y un receptor de GPS y esta com-puesto completamente por modulos MEMS. El pesoes de 44 gramos, mide 49x36x22 mm y el consumoes de 800mW a 5V. El modelo estandar tiene lassiguientes caracterısticas:
Figura 12: IG-500N de SBG Systems
• Balanceo y cabeceo: 0.35o
• Rumbo: 1o
Actas de las XXXV Jornadas de Automática, 3-5 de septiembre de 2014, ValenciaISBN-13: 978-84-697-0589-6 © 2014 Comité Español de Automática de la IFAC (CEA-IFAC)
• Velocidad: 0.1 m/s
• Posicion: < 2m
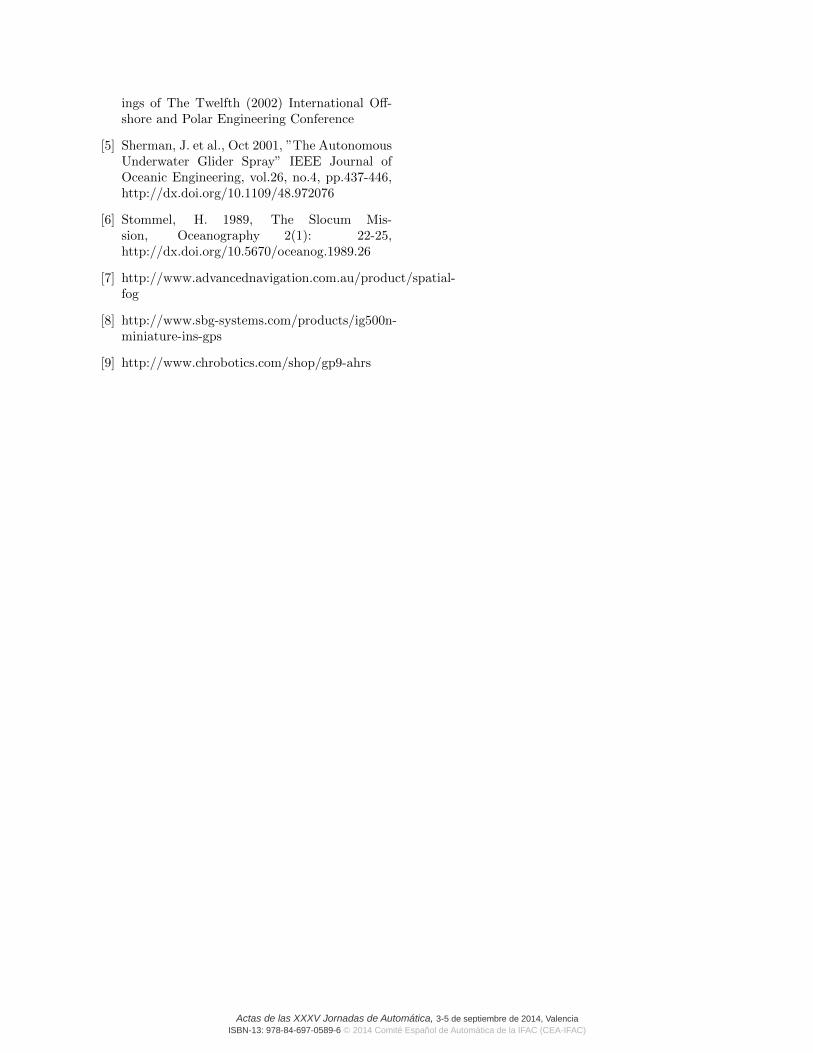
Y por ultimo el modelo de gama baja, el GP9 deCH Robotics [9] (Figura 13). Es un modulo muyreducido, que solamente pesa 11 gramos y con unasdimensiones de 38x33x13 mm. Tiene un consumode menos de 150mA a 5V buscando senal de GPS yuna vez fijada, consume menos de 100mA a 5V, queequivale respectivamente a 750 y 500mW. No tieneuna carcasa, pero montado en el PAS tampoco esnecesario. Los principales especificaciones son:
Figura 13: GP9 de CH Robotics
• Precision estatica: 1o
• Precision dinamica: 3o
• Rango Giro: 2000 o/s
• Rango Acelerometro: 8 g
3.3 Conclusion
Visto la enorme diferencia en productos ofrecidos,es complicado escoger un modelo que sirve para to-das las aplicaciones.Por lo tanto el modelo mas sim-ple, mas economico y que tenga un mayor ahorrode energıa ademas de un tamano reducido, lo haceel mas adecuado, porque un PAS no necesita sabersu rumbo exacto en todo momento y teniendo unaidea general de su posicion y rumbo es mas que su-ficiente, por todo esto, el sensor escogido para la
navegacion submarina del PAS, es el acelerometrotermico MEMS.
4 Conclusiones Generales
Para finalizar el presente artıculo, hemos hecho unarevision completa a dos de los aspectos mas im-portantes del PAS, su flotabilidad/movimiento, sudeslizamiento en el agua y su posicionamiento, dosaspectos claves en el exito o no de la mision de unPAS, pues este sin saber por donde va o como rec-tificar su posicion si fuera necesario y sin variar laflotabilidad para conseguir desplazarse por el agua,no podrıa realizar ninguna de las misiones para lasque se puede disenar un PAS: control de fauna yflora marina, niveles de clorofila en los bancos de al-gas, toma de fotografıas del fondo marino, deteccionde sustancias quımicas, etc. Por tanto, podemosafirmar, que de una buena eleccion de los compo-nentes en estos dos aspectos puede ser la diferenciaentre el exito o no de la mision, y ademas depen-diendo de la finalidad del PAS, convendrıa escogeruna configuracion u otra.
Agradecimientos
El presente proyecto de investigacion ha sido fi-nanciado como Proyecto de Investigacion ENE2010-21711-C02-01 por el MICINN espanol. Las empresasValenciaPort (Autoridad Portuaria de Valencia), In-geteam Service S.A., Real Club Nautico de Valenciaestan colaborando activamente en el desarrollo delmismo.
Referencias
[1] Eriksen, C.C. et al., Oct 2001, ”Seaglider:a long-range autonomous underwater vehiclefor oceanographic research”, IEEE Journal ofOceanic Engineering, vol.26, no.4, pp.424-436,http://dx.doi.org/10.1109/48.972073
[2] Fennelly, J. et al. 2013, Thermal MEMS Ac-celerometers Fit Many Applications, SensorMagazin 3, pp.18-20
[3] Gernot, Cyrille, September 2007, ”GPS Sig-nal Disturbances by Water in Various States,”Proceedings of the 20th International Techni-cal Meeting of the Satellite Division of The In-stitute of Navigation (ION GNSS 2007), FortWorth, TX, pp. 2187-2195.
[4] Hyakudome, T. 2002, Buoyancy Control forDeep and Long Cruising Range AUV, Proceed-
Actas de las XXXV Jornadas de Automática, 3-5 de septiembre de 2014, ValenciaISBN-13: 978-84-697-0589-6 © 2014 Comité Español de Automática de la IFAC (CEA-IFAC)
ings of The Twelfth (2002) International Off-shore and Polar Engineering Conference
[5] Sherman, J. et al., Oct 2001, ”The AutonomousUnderwater Glider Spray” IEEE Journal ofOceanic Engineering, vol.26, no.4, pp.437-446,http://dx.doi.org/10.1109/48.972076
[6] Stommel, H. 1989, The Slocum Mis-sion, Oceanography 2(1): 22-25,http://dx.doi.org/10.5670/oceanog.1989.26
[7] http://www.advancednavigation.com.au/product/spatial-fog
[8] http://www.sbg-systems.com/products/ig500n-miniature-ins-gps
[9] http://www.chrobotics.com/shop/gp9-ahrs



















![STAG-4 QBOX,QNEXT,STAG-300 QMAX - Instrukcja_ver1_7_4[07-01-2016]_PL](https://img.pdfslide.tips/doc/110x75/56d6be221a28ab301690c4fe/stag-4-qboxqnextstag-300-qmax-instrukcjaver17407-01-2016pl.jpg)