Embed Size (px)
Citation preview
Estudos de Controle – Análise de Resposta Transitória e de Regime Estacionário
1
Sinais de Teste
• Sinais de entrada usados para projetar o sistema de controle.
• Geralmente, são suficientes para modelar o comportamento do sistema para outras entradas.
• Possibilitam a comparação de desempenho dos sistemas em relação a uma mesma base.
• São funções de tempo muito simples: degrau, rampa, impulso, senoidais e outras.
2
Resposta Temporal
• Constituída de duas partes:
• Resposta transitória: do estado inicial ao estado final.
• Resposta estacionária: comportamento a medida que o tempo tende ao infinito.
𝑐 𝑡 = 𝑐𝑡𝑟 𝑡 + 𝑐𝑠𝑠(𝑡)
3
Estabilidade
• Estabilidade absoluta:
• Se o sistema é estável ou instável.
• Sistema de controle linear e invariante no tempo:
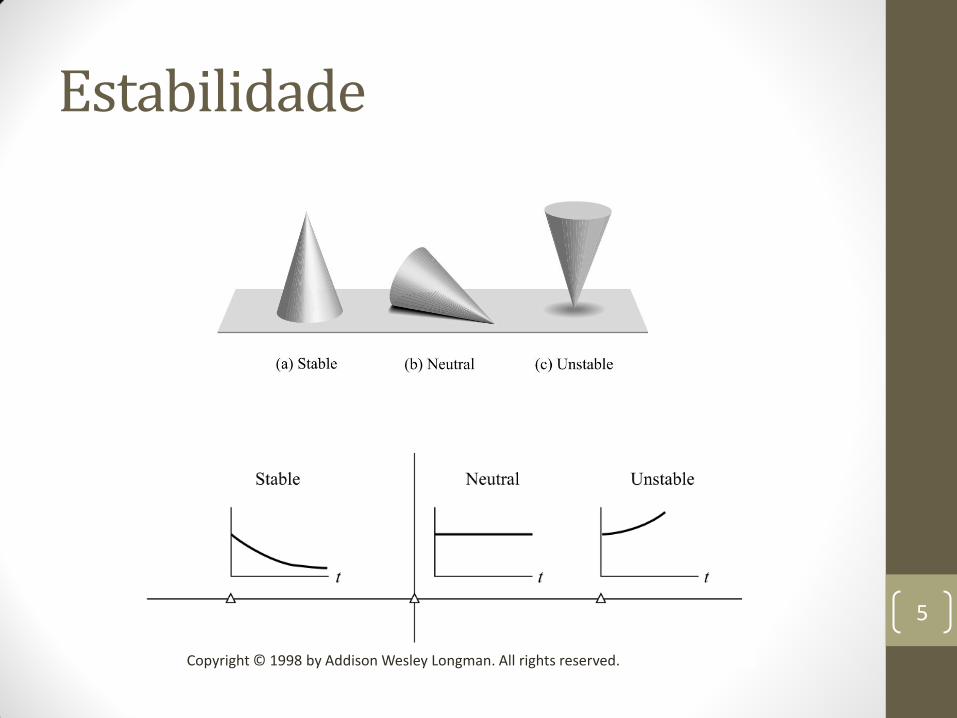
• Estável se a saída sempre retorna ao estado de equilíbrio a partir de uma condição inicial.
• Criticamente estável se as oscilações do sinal de saída se repetirem de maneira contínua a partir de uma condição inicial.
• Instável se a saída divergir sem limites a partir de uma condição inicial.
4
Estabilidade
5
Copyright © 1998 by Addison Wesley Longman. All rights reserved.
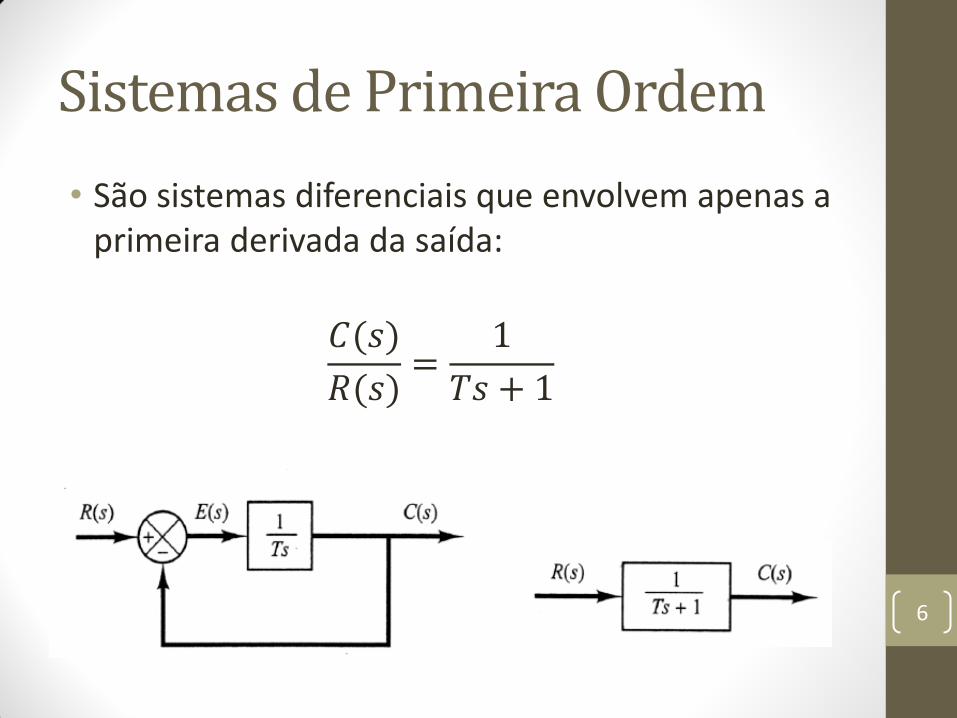
Sistemas de Primeira Ordem
• São sistemas diferenciais que envolvem apenas a primeira derivada da saída:
𝐶(𝑠)
𝑅(𝑠)=
1
𝑇𝑠 + 1
6
Sistemas de Primeira Ordem
• Resposta ao degrau unitário:
• Degrau unitário:
𝑢 𝑡 = 0, 𝑡 < 01, 𝑡 ≥ 0
𝑈 𝑠 = 1
𝑠
• Ou seja, fazendo 𝑅 𝑠 = 1
𝑠 , temos:
𝐶 𝑠 = 1
𝑇𝑠 + 1×1
𝑠
7
Sistemas de Primeira Ordem
• Resposta ao degrau unitário:
• Para analisar a resposta no tempo, devemos obter a transformada inversa de Laplace.
• Expandindo em frações parciais:
𝐶 𝑠 = 1
𝑠−
1
𝑠 + (1 𝑇 )
• Inversa:
𝑐 𝑡 = 1 − 𝑒−𝑡 𝑇 , para t ≥ 0
8
Sistemas de Primeira Ordem
• Resposta ao degrau unitário:
𝑐 𝑡 = 1 − 𝑒−𝑡 𝑇 , para t ≥ 0
9
Sistemas de Primeira Ordem
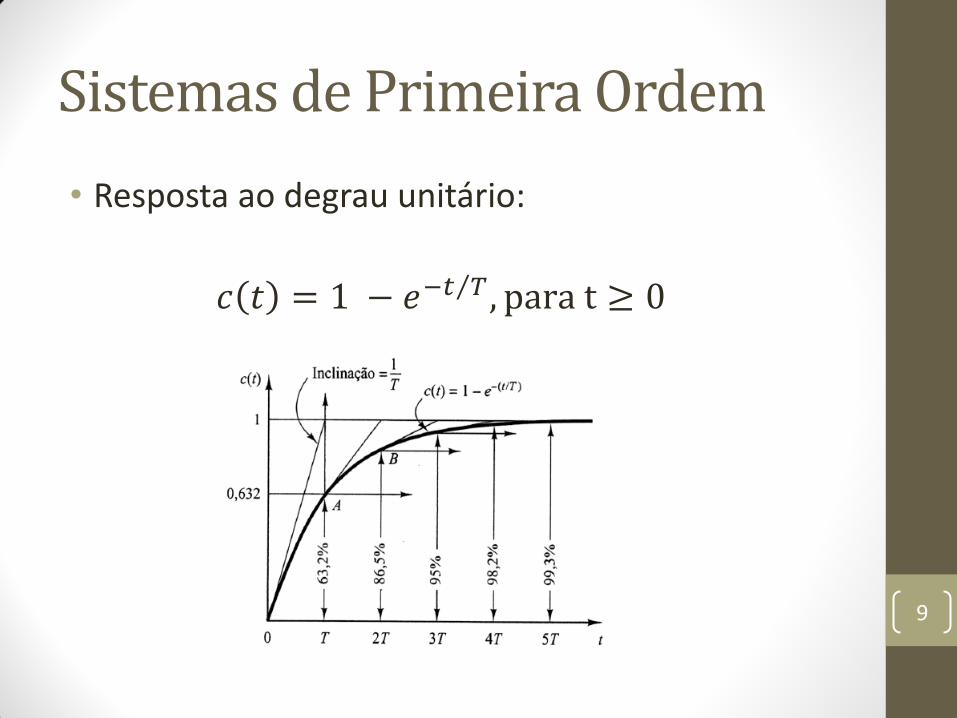
• Resposta ao degrau unitário:
𝑐 𝑡 = 1 − 𝑒−𝑡 𝑇 , para t ≥ 0
• Analisando a resposta, podemos observar:
• Varia de 0 a 1.
• Em t = T, o valor de c(T) é 0,632, o que representa 63,2% da sua variação total.
• Quanto menor o T, mais rapidamente o sistema responde.
• A derivada em t=0 é 1/T. Ou seja, se fosse mantida a velocidade inicial de resposta, o valor final seria alcançado em t=T.
10
Sistemas de Primeira Ordem
• Resposta à rampa unitária:
• Rampa unitária:
𝑢 𝑡 = 0, 𝑡 < 0𝑡, 𝑡 ≥ 0
𝑈 𝑠 = 1
𝑠2
• Ou seja, fazendo 𝑅 𝑠 =1
𝑠2 , temos:
𝐶 𝑠 = 1
𝑇𝑠 + 1×1
𝑠2
11
Sistemas de Primeira Ordem
• Resposta à rampa unitária:
• Expandindo em frações parciais:
𝐶 𝑠 = 1
𝑠2−𝑇
𝑠+
𝑇2
𝑇𝑠 + 1
• A transformada de Laplace inversa é:
𝑐 𝑡 = 𝑡 − 𝑇 + 𝑇𝑒−𝑡 𝑇 , para t ≥ 0
12
Sistemas de Primeira Ordem
• Resposta à rampa unitária:
𝑐 𝑡 = 𝑡 − 𝑇 + 𝑇𝑒−𝑡 𝑇 , para t ≥ 0
13
Sistemas de Primeira Ordem
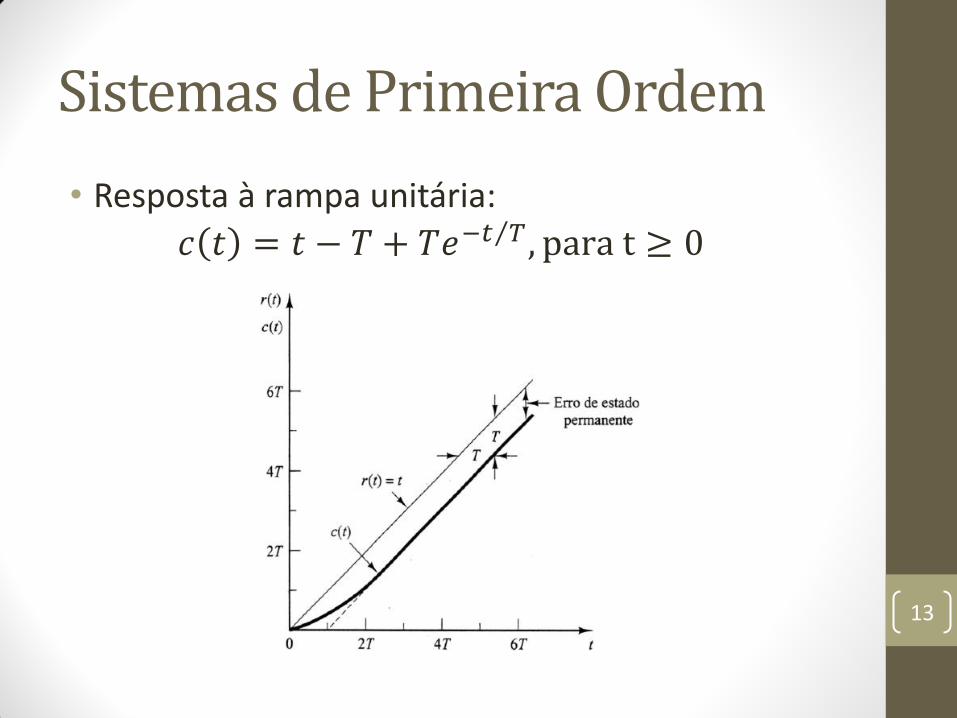
• Resposta à rampa unitária:
𝑐 𝑡 = 𝑡 − 𝑇 + 𝑇𝑒−𝑡 𝑇 , para t ≥ 0
• Analisando a resposta, podemos observar:
• Existe um erro estacionário:
𝑒 𝑡 = 𝑟 𝑡 − 𝑐 𝑡 = 𝑇(1 − 𝑒−𝑡 𝑇 )
• Conforme t tende ao infinito, o erro se aproxima de T.
• Quanto menor a constante T, menor o erro.
14
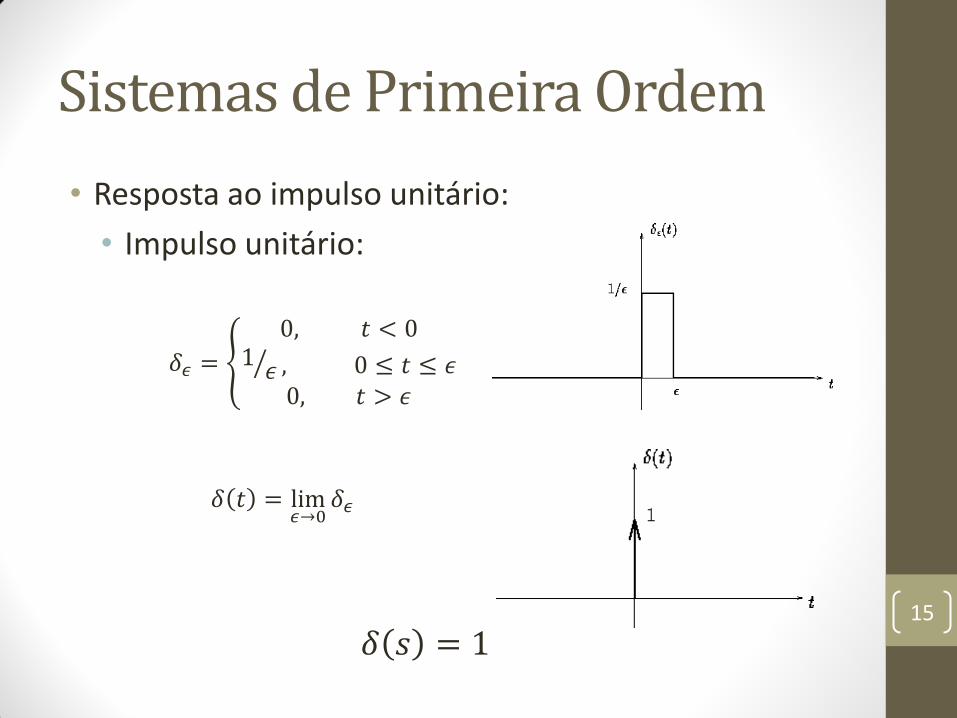
Sistemas de Primeira Ordem
• Resposta ao impulso unitário:
• Impulso unitário:
𝛿𝜖 =
0, 𝑡 < 01𝜖 , 0 ≤ 𝑡 ≤ 𝜖0, 𝑡 > 𝜖
𝛿 𝑡 = lim
𝜖→0𝛿𝜖
𝛿 𝑠 = 1
15
Sistemas de Primeira Ordem
• Resposta ao impulso unitário:
• Ou seja, fazendo 𝑅 𝑠 = 1 , temos:
𝐶 𝑠 = 1
𝑇𝑠 + 1
• A transformada de Laplace inversa é:
𝑐 𝑡 =1
𝑇𝑒−𝑡 𝑇 𝑝𝑎𝑟𝑎 𝑡 ≥ 0
16
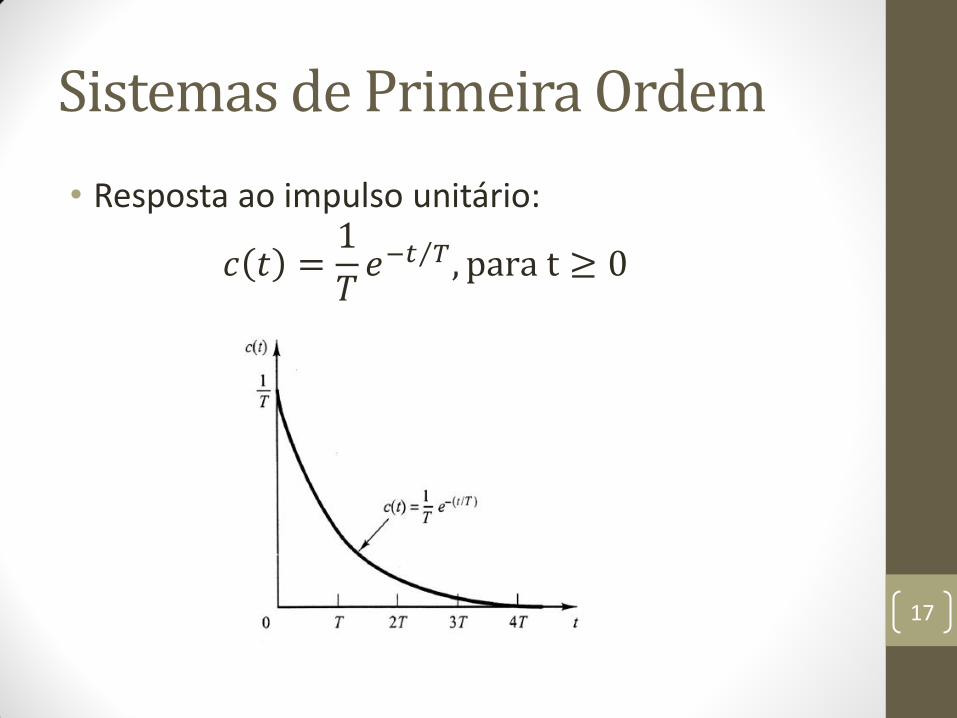
Sistemas de Primeira Ordem
• Resposta ao impulso unitário:
𝑐 𝑡 =1
𝑇𝑒−𝑡 𝑇 , para t ≥ 0
17
Sistemas de Primeira Ordem
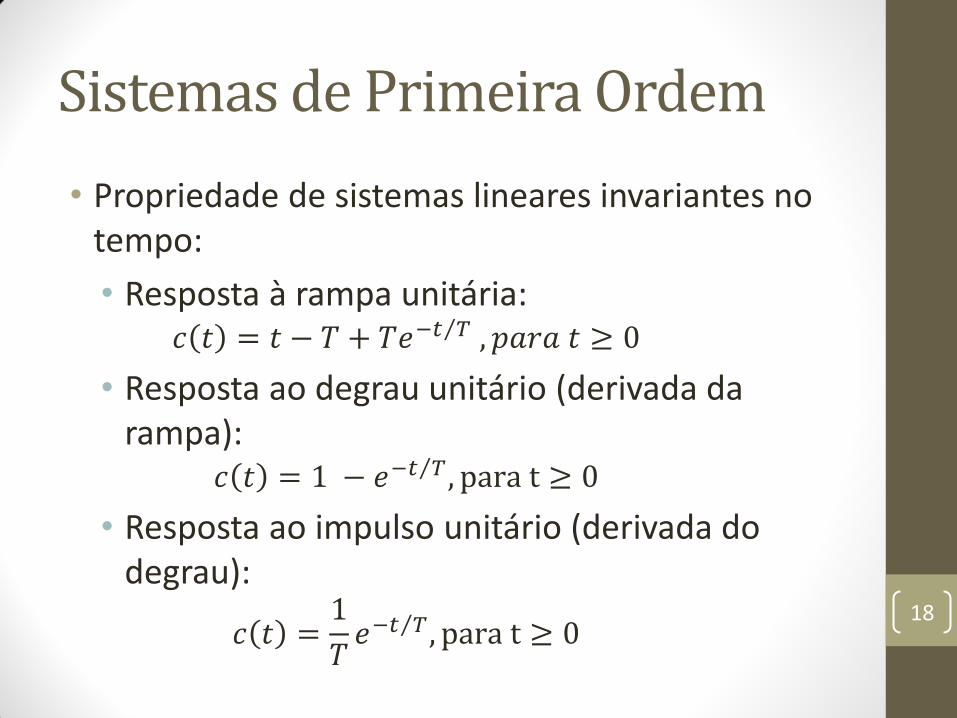
• Propriedade de sistemas lineares invariantes no tempo:
• Resposta à rampa unitária: 𝑐 𝑡 = 𝑡 − 𝑇 + 𝑇𝑒−𝑡 𝑇 , 𝑝𝑎𝑟𝑎 𝑡 ≥ 0
• Resposta ao degrau unitário (derivada da rampa):
𝑐 𝑡 = 1 − 𝑒−𝑡 𝑇 , para t ≥ 0
• Resposta ao impulso unitário (derivada do degrau):
𝑐 𝑡 =1
𝑇𝑒−𝑡 𝑇 , para t ≥ 0
18
Sistemas de Primeira Ordem
• Propriedade de sistemas lineares invariantes no tempo:
• A resposta à derivada de um sinal pode ser obtida diferenciando-se a resposta do sinal original.
• A resposta à integral do sinal original pode ser obtida pela integração da resposta do sinal original e pela determinação da constante a partir da condição inicial de resposta nula.
19
Sistemas de Primeira Ordem
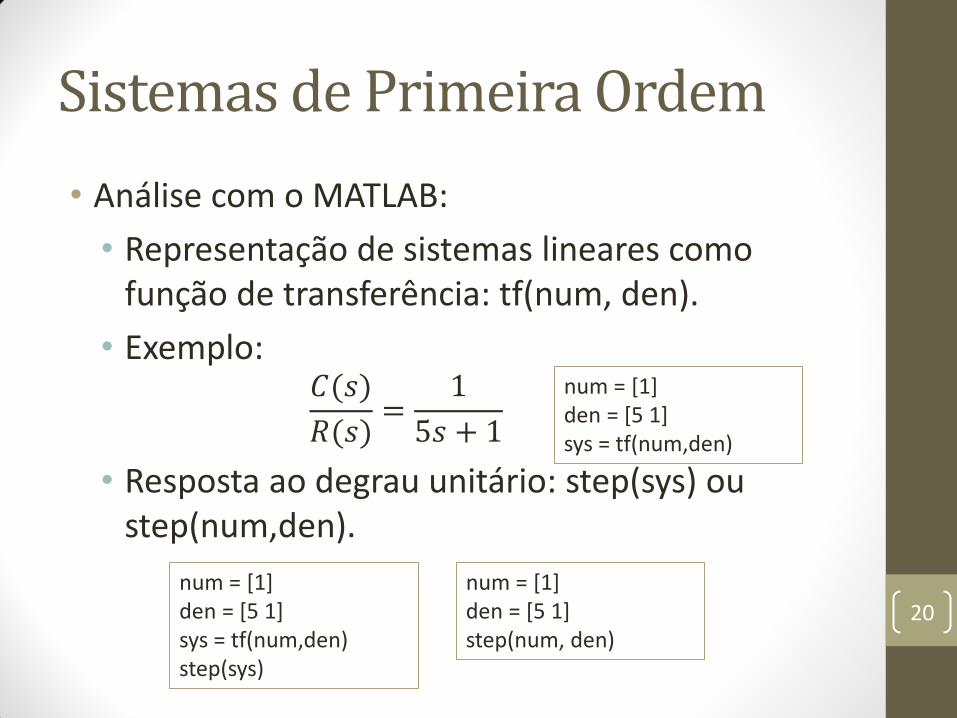
• Análise com o MATLAB:
• Representação de sistemas lineares como função de transferência: tf(num, den).
• Exemplo: 𝐶(𝑠)
𝑅(𝑠)=
1
5𝑠 + 1
• Resposta ao degrau unitário: step(sys) ou step(num,den).
20
num = [1] den = [5 1] sys = tf(num,den)
num = [1] den = [5 1] sys = tf(num,den) step(sys)
num = [1] den = [5 1] step(num, den)
Sistemas de Primeira Ordem
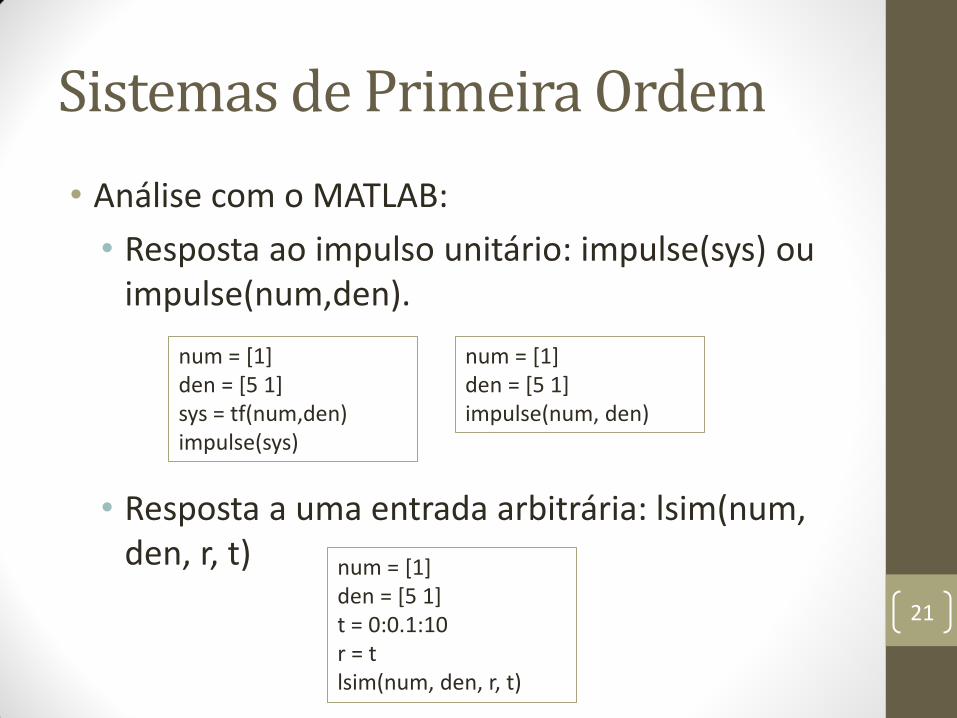
• Análise com o MATLAB:
• Resposta ao impulso unitário: impulse(sys) ou impulse(num,den).
• Resposta a uma entrada arbitrária: lsim(num, den, r, t)
21
num = [1] den = [5 1] sys = tf(num,den) impulse(sys)
num = [1] den = [5 1] impulse(num, den)
num = [1] den = [5 1] t = 0:0.1:10 r = t lsim(num, den, r, t)