Embed Size (px)
Citation preview

Fracture Modeling in Computer Graphics
Lien Muguercia, Carles Bosch1, Gustavo Patow
ViRVIG-UdG, Universitat de Girona, Spain
Abstract
While object deformation has received a lot of attention in Computer Graphics in recent years, with several good surveys thatsummarize the state-of-the-art in the field, a comparable comprehensive literature review is still needed for the related problem ofcrack and fracture modeling. In this paper we present such a review, with a special focus on the latest advances in this area, and acareful analysis of the open issues along with the avenues for further research. With this survey, we hope to provide the communitynot only a fresh view of the topic, but also an incentive to delve into and explore these unsolved problems further.
Keywords: crack modeling, fracture modeling, simulation, survey
1. Introduction1
Physically plausible object deformation and fracture have2
been of central importance in many fields, and particularly in3
Computer Graphics since more than 25 years ago [1, 2]. Differ-4
ent areas, such as architecture and fabrication, usually require5
very precise simulations, for which numerical models have been6
devised using a combination of continuum mechanics, dynam-7
ics, differential geometry, calculus and Computer Graphics, among8
others. As a body can undergo many physical phenomena, frac-9
tures are essential to the movie and video game industries be-10
cause of the explosions or shattering bodies required. In gen-11
eral, the phenomena we study in this survey can be considered12
as ubiquitous, as can be observed in almost every structure,13
from crystals to entire buildings.14
In spite of its importance, the study of fractures is still a15
non-closed problem, with several open issues to be dealt with,16
most of which result from the many approximations and sim-17
plifications introduced to simulate the intrinsic complexities of18
this phenomenon. Advances in this field would open new fron-19
tiers for applications such as simulation and prototyping of frag-20
ile objects, resistance assessment and model resilience studies.21
There are a number of good reviews on deformable models22
in Computer Graphics [1, 3] as well as aging/weathering tech-23
niques [4] that touch on the topic of fracture processes. How-24
ever, we feel that a deep review of the current state-of-the-art25
in crack and fracture modeling techniques is missing. Thus, in26
this paper we aim to fill this gap with a comprehensive review27
of the work done thus far, and, to improve understanding and28
strengthen the relationships among the different works carefully29
classifying them according to several criteria.30
2. Overview31
After an introduction to the mathematical background needed32
to understand the basic principles of object deformation and the33
phenomenon of fracture (Section 3), we present our principal34
classification of the different methods involved in the fracture35
process:36
• Physically-based methods (Section 4), are those that fol-37
low a simulation-based approach to compute the fracture38
opening, propagation and appearance. Among these, we39
sub-classify the state-of-the-art in the field into:40
– Mass-spring models (Section 4.1), where the object41
is approximated by a finite set of masses, pairwise42
joined by springs, each with its own defining pa-43
rameters.44
– Finite element methods (Section 4.2), that partition45
the object into a set of disjoint elements (e.g., tetra-46
hedrons) joining at discrete points. When the prob-47
lem is formulated in terms of these points, then it is48
converted into a set of simpler algebraic equations,49
which are then solved to establish the behavior of50
the system.51
– Meshless methods (Section 4.3), where the model is52
approximated with a set of unconnected calculation53
points that are simulated. The value for any other54
point in the model is obtained by interpolation.55
– Other approaches (Section 4.4) cover those, which56
do not fall into the previous categories, but rather57
follow physical principles for their simulations of58
the fracture process.59
• Geometry-based methods (Section 5), also known as pro-60
cedural methods, seek plausible patterns but are not inter-61
ested in a physically accurate phenomena description.62
• Example-based methods (Section 6) try to mimic real-63
world fractures by copying the behavior observed in real64
phenomena. These methods, which build on both Com-65
puter Vision and Computer Graphics techniques, usually66
extract parameters from images and then apply these to67
generate a new fracture.68
Preprint submitted to Computers & Graphics October 16, 2014

Finally, in our conclusions (Section 7), we present compar-69
isons and further classification schemes to ensure the reader has70
a comprehensive view of the most recent developments in this71
area. This includes Table 2, which provides further details of72
the main techniques reviewed in this survey. Some avenues for73
future research are also outlined at the end.74
3. Background75
In this section we will briefly introduce the main physical76
concepts behind generating and propagating fractures.77
3.1. Stress and Strain78
In continuum mechanics, we define the physical quantities79
of an object as a continuous function in space (and time). In80
general, we define the rest shape of an undeformed object as81
the connected subspace M ⊂ R3 [1, 3, 5]. Each point x ∈ M82
has its own properties defined at its coordinates x inside the ob-83
ject, called material coordinates. When we deform the object,84
we apply forces that move its x points to their new positions x’.85
With the old and new positions we can define the displacement86
vector field on M as u(x) = x’ − x, which represents the posi-87
tional differences between the current point and rest positions.88
Refer to Figure 1 for a graphical representation.89
Figure 1: The displacement vector field u(x).
We usually measure deformation in terms of the so-calledstrain, which we often define as a normalized measure of thebody deformation. This measure represents the displacementbetween particles in the body relative to a reference length. Ba-sically, the strain measures the local deviation of a given de-formation from a rigid-body deformation. As the deformationin different directions might be different, the strain is generallyexpressed as a tensor. In three dimensions, this tensor is of or-der 2. Given the field u(x), we can compute the elastic strainε of a point at a given time, simply by relating it to the gradi-ent ∇u. Observe that ∇u is a 3 × 3 matrix of the derivatives
(∇u)i j = ∂ jui. In Computer Graphics the strain is usually de-fined for small deformations as one of
εG =12
(∇u + [∇u]T + [∇u]T∇u)
εC =12
(∇u + [∇u]T )
The first one (i.e., εG) is called the Green-Lagrange’s strain ten-90
sor and εC the Cauchy strain tensor, is its linearized counterpart.91
Based on the strain tensor, we can compute the stress tensorσ ∈ R3×3, which provides information about the forces actingon a point when the body is deformed. Of course, this relation-ship strongly depends on the properties of the material, and canbe quite complex. In Computer Graphics it is customary to useHook’s law:
σ = E · ε
where E is a rank 4 tensor which relates both tensors σ andε in a linear way, which is useful for small deformations. Onthe other hand, other definitions of stress are required for largedeformations, such as the Piola-Kirchhoff stress tensor, whichexpresses the stress relative to the reference configuration (incontrast to the Cauchy stress tensor that expresses the stress rel-ative to the present configuration); the Biot stress tensor, whichexpresses the forces due to stretch only applied in the unde-formed body per unit undeformed area; or the Kirchhoff stresstensor, which is widely used when there is no change in volumeduring plastic deformation [6]. Another possibility is the SaintVenant-Kirchhoff model:
σ = λTr(εG)I3 + 2µεG
where λ and µ are constants specific to each material and de-92
fine the way it is deformed, and I3 is the 3 × 3 identity ma-93
trix. For more information on these tensors, we refer the inter-94
ested reader to the works authored by Bonet and Wood [6] and95
Chakrabarty [7].96
In general, the stress tensor σ is a symmetric 3 × 3 matrix,97
so it has 3 real eigenvalues. These eigenvalues correspond to98
the stresses in the principal directions, represented by its re-99
spective eigenvectors to the principal stress directions. Positive100
eigenvalues indicate tension, while negative eigenvalues repre-101
sent compression.102
It is possible to compute the body force f for each pointfrom σ as:
f (x, t) = ∇ · σ(x, t)
whose elements are fi =∑
j ∂ jσi j. With these forces f (x, t),we can model deformation using the equations of motion. Ingeneral, these equations are posed in terms of the density ρ ofthe material, which again is a function of position x and time t:
ρ(x, t)∂2
∂t2 x = fi(x, t)
However, for general cases it is almost impossible to find an103
analytical solution, and we must resort to numerical methods,104
which are the subject of the following sections.105
2

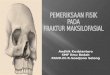
Figure 2: Brittle (a) vs. ductile (b) fracture, from O’Brien et al. [8]. (imagecopyright ACM 2002)
3.2. Brittle and ductile fractures106
We can define an elastic material as one that will return to107
its original shape when the external forces on it cease to exist.108
To the contrary, a plastic material, will not go back to its orig-109
inal configuration. Real materials usually have a limited elas-110
tic behavior, and if deformed beyond a certain threshold (called111
elastic limit or yield point), they will undergo a plastic deforma-112
tion. If the material is deformed further, there is another limit,113
called the failure threshold σmax, which is the point at which the114
material fractures. This failure threshold is a material-specific115
parameter. If the elastic limit and the failure threshold are close116
to each other, then the material will undergo a small (almost117
negligible) elastic deformation before fracturing, and the ma-118
terial is termed brittle. A brittle fracture releases most of its119
elastic energy thus allowing the crack to proceed further into120
the material and reducing the energy required to break it. As a121
consequence, brittle objects generally shatter.122
On the other hand, if the thresholds are adequately sepa-123
rated, such that the failure threshold is much larger than the124
elastic limit, then the object undergoes an elastic deformation,125
followed by a plastic one, before being fractured. In this case126
the material is termed ductile (Refer to Figure 2).127
Examples of ductile materials include structural steel, as128
well as many alloys of other metals. They usually exhibit a129
very linear stress-strain relationship up to the well defined yield130
point, as shown in Figure 3. The stress value plotted in curve131
(A) was obtained by dividing the load P by the cross-sectional132
area A0 of the specimen measured before any deformation had133
taken place (compare to its tensorial version defined above).134
The linear portion of the curve shown in the left is the elastic135
region, and the slope is the modulus of elasticity or Young’s136
Modulus. The curve typically decreases slightly after passing137
the yield point (Point 2 in the figure). As deformation contin-138
ues, the stress increases on account of strain hardening until139
it reaches the ultimate strength (Point 1 in the figure). Until140
this point, the cross-sectional area decreases uniformly and ran-141
domly. However, beyond this point a neck forms where the lo-142
cal cross-sectional area decreases more quickly than the rest of143
the sample, which results in an increased true stress. Since the144
cross-sectional area of the specimen decreases as P increases,145
the stress plotted in curve (A) does not represent the true stress146
in the specimen, shown as curve (B). The difference between147
this engineering stress (P/A0) and the true stress (P/A) becomes148
apparent in ductile materials after yield has started. While the149
engineering stress, which is directly proportional to the load150
P, decreases with P during the necking phase, the true stress,151
which is proportional to P but also inversely proportional to A,152
is observed to keep increasing until fracture of the specimen oc-153
curs (at point 3 in the figure). The actual fracture point is in the154
same vertical line as the visual fracture point. It is easily appre-155
ciated that ductile fractures require greater amounts of energy156
to break as the result of the considerable energy used for plas-157
tic deformation, so in fact these objects usually tear [9]. For-158
mally, we can say that fracture will happen, in both cases, when159
the maximum stress is greater than the failure threshold σmax.160
Other factors, such as material density and damping factors, are161
usually taken into account to simulate fracture processes.162
Figure 3: Approximate stress vs. strain. Left: typical curve for steel. Here,(A) is the apparent curve (computed with σ = P/A0, where P is the load andA0 the cross section of the sample before any deformation) and (B) is the realcurve (computed with σ = P/A, with A the real cross section of the samblebeing deformed). Right: brittle material [9]. In the figures, numbered regionsrepresent: 1. Ultimate Strength; 2. Yield Strength; 3. Fracture point (at σmax);4. Strain hardening region; 5. Necking region. Adapted from [10]
To simplify computations, it is customary to split the totalstrain ε into its elastic and plastic parts, as ε = εe + εp. As aconsequence, one option commonly used for the yield point isthe von Mises yield criterion [11], defined as
γ1 <∣∣∣∣∣∣εe −
Tr(εe)3
I3∣∣∣∣∣∣ (1)
3

where γ1 is the yield threshold, Tr(.) is the trace of a matrix,and ||.|| is the Frobenius norm. Basically, this last expressionmeasures the deviation of the elastic strain from an initial ref-erence configuration. The second term, to the right, essentiallyeliminates any dilation effect, concentrating only on shape dis-tortions. For strains beyond this point, plastic deformation oc-curs. To handle the plastic part of the deformation, O’Brien [8]proposes measuring the change in the plastic strain as
∆εp =||ε′|| − γ1
||ε′||ε′
where ||ε′|| is the right hand side of Equation 1. Then, the limiton the maximum plastic deformation can be enforced by updat-ing the plastic strain with the threshold γ2 as
εp := (εp + ∆εp)min(1,
γ2
||εp + ∆εp||
)Thus, the difference between the total strain and the plastic163
strain is the current elastic strain. By introducing γ2 we are164
limiting the plastic strain, but not the total strain, which can be165
larger and produce fracture.166
Both brittle and ductile fracture have been widely addressed167
in Computer Graphics, although their different properties often168
led to the use of different methods to simulate their behavior.169
Refer to Section 4 for further details.170
3.3. Visual aspects of fracture simulation171
The presence of cracks and fractures on objects may provide172
a great deal of information on their properties, interactions with173
other objects, usage or history. Objects being impacted by other174
objects are expected to show deformation and/or fracture, and175
crack patterns are also very common on aged environments sub-176
ject to fatigue conditions. Properly simulating this phenomenon177
is thus important to improving the perceived realism of virtual178
environments.179
Physically-based simulation is especially effective for mod-180
eling and animating fractured objects, which tend to have many181
degrees of freedom. Animating these phenomena with keyfram-182
ing and motion capture would be much more difficult [12]. Most183
simulation techniques reviewed in this survey draw heavily from184
the field of fracture mechanics and its literature, which abstracts185
the micro-scale nature of fracture to a macroscopic level based186
on a continuum model. The requirements of engineering ap-187
plications, however, are different from the ones in graphics ap-188
plications. In Computer Graphics, simulation techniques rely189
on simplifications that would be unacceptable in an engineer-190
ing context. In the continuum approach, the scale of the ef-191
fects being modeled is significantly greater than the scale of the192
materials composition. Even if macroscopic fractures can be193
significantly influenced by effects occurring at the microscale,194
ignoring the microscopic effects in favour of a macroscopic de-195
scription is often reasonable, as our interest is on the graphical196
appearance rather than its physical correctness. Similarly, nu-197
merical accuracy is less important compared to issues such as198
visual appearance, ease of use, or computational efficiency.199
In order to achieve good visual quality, we must rely on200
representations able to capture realistic fracture patterns. A201
common limitation present in earlier approaches is to limit the202
propagation of fractures to the boundaries of the initial mesh,203
which tends to create visible artifacts. Irregular shaped shards204
can only be achieved by allowing fractures to propagate in ar-205
bitrary directions. Rendering realistic fractures from the results206
of a simulation may also pose its own problems. In particular,207
when the fracture is not represented by the boundaries of the208
original mesh elements, then we have a dissociation that results209
in two different meshes being used: a simulation mesh and a210
rendering mesh. In such situations, special care is needed to211
maintain consistency between both representations.212
3.4. Related reading material213
For a more in-depth review of the related background, the214
interested reader is referred to some previous surveys. In partic-215
ular, the works by Gibson and Mirtich [1] and Nealen et al. [3]216
present the most significant contributions for physically-based217
deformable models in recent decades. Akin to our classifica-218
tion, they also focus on finite element methods, mass-spring-219
based methods, meshfree methods, coupled particle systems220
and reduced deformable models based on modal analysis. They221
also make a particular connection with the fundamental con-222
cept of time discretization, and present a number of application223
areas such as cloth, hair, virtual surgery, deformation and frac-224
ture. The background in the recent thesis by Glondu [5] should225
also be taken into account, as model deformation is presented226
and previous work is carefully classified. Finally, the survey by227
Merillou and Ghazanfarpour [4] presents a very detailed sur-228
vey on aging and weathering techniques where methods dealing229
with crack formation are also reviewed.230
4. Physically-based methods231
Effective simulation of fracture processes is one of the most232
accurate ways of approaching the problem. The main tech-233
niques usually used to solve this complex problem are mass-234
spring models, finite element methods and meshless methods.235
In general, an analytical solution is not possible, so we must236
resort to numerical approximations to solve the equations for237
the material. One option is explicit integration schemes, which238
provide explicitly the values for a given time step in function of239
the previous step. These are usually not unconditionally stable:240
they converge only for small values of the integration step. Two241
examples are the explicit Euler integration [13] and the Runge-242
Kutta integration [14]. To the contrary, implicit schemes pose243
a system of equations that must be solved, but provide stability244
for larger time steps, some even arbitrarily large. An example245
of these is the implicit Euler method [13]. The choice made be-246
tween the two has implications not only on the stability of the247
system but also on its computational time.248
4.1. Mass-spring models249
Mass-spring models are one of the simplest ways to modela deformable body. Mass-spring models are characterized bydiscretizing M into a finite set of particles {pi; 1 ≤ i ≤ n}. Eachparticle pi has its own mass mi and position xi, and are pairwise
4

connected with springs, each with its own stiffness, dampingfactor and rest length. Each particle is set to a classic equilib-rium equation relating the internal forces (the springs) and theexternal forces (gravity, collisions) with its mass:
ρi∂2xi
∂t2 = fi ,
where fi is the sum of the forces acting on the particle pi, andρi is the mass associated with the i-th particle. In general, fiis described as the sum of two main terms: the external forces(e.g., gravity or collisions) and the internal forces, which comefrom the springs attached to the particle pi. In general, springsfollow Hooke’s law [15], which can be stated as:
fi = k(|∆xi j| − li j)∆xi j
||∆xi j||,
with k being the spring constant that characterizes its stiffness,250
li j its original or rest length, and ∆xi j = xi−x j its current length,251
measured as the difference between the particle positions. As252
all the particles are connected through the springs, the equa-253
tions lead to a system of coupled ordinary differential equations,254
which is solved through numerical integration methods. When255
the limit of a spring exceeds a given threshold, the breakage is256
simply performed by removing the corresponding connection257
between the particles.258
In Computer Graphics, some of the first approaches for sim-259
ulating fracture relied on mass-spring representations [16, 17,260
18, 19, 20]. Norton et al. [16], for instance, place lattices of261
cubic cells around the surface of objects and connect them with262
several spring configurations. They simulate brittle fracture due263
to impacts and stretching effects by removing an entire cube of264
springs at once, which may produce visible artifacts. For the265
final surface, they classify the faces of the model as belonging266
to the interior or the fracture surface, generating and rendering267
a polygon in the latter.268
Hirota et al. [17, 18] focus on the simulation of drying ma-269
terials and their temporal cracking. A set of shrinking and270
contraction effects modify the physical properties of a material271
based on a set of measurements, which results in the opening272
and propagation of cracks (Refer to Figure 4 for an example).273
For this, both a bi-layered representation [17] and a 3D mass-274
spring model [18] have been examined. For visualization, Hi-275
rota et al. rely on a marching tetrahedra-like algorithm that uses276
the broken points on the springs to compute the crack shape.277
Aoki et al. [21] later incorporate a moisture diffusion model to278
guide the drying process. Federl and Prusinkiewicz [19, 20]279
also use a similar bi-layered approach for modeling tree bark,280
but based on wedge elements and element removal.281
Mazarak et al. [22] simulate fractures and debris produced282
by explosions based on a similar strategy, where objects are283
modeled with voxels connected through rigid links, represent-284
ing infinitely stiff springs (Refer to Figure 5). Based on the285
strength of a spherical blast wave and a set of heuristics, the286
yield limit of each link is subsequently decreased until fracture287
appears. The spring-based model is later improved on [23] by288
using adaptive voxel shapes and including rotational forces.289
Figure 4: Comparison between the cracks obtained on a real drying clay (top)and the corresponding simulation (bottom), from [18]. (image copyrightSpringel-Verlag 2000)
Figure 5: Graph representation of the connected voxel model, from Mazarak etal. [22]. (image copyright Mazarak 1999)
Smith et al. [24] propose a system that connects point-masses290
with distance-preserving constraints rather than a grid of stiff291
springs. Instead of computing displacements, they evaluate the292
forces that these constraints exert in response to the impulses,293
and use strength thresholds to indicate when and where objects294
will break. In contrast to explicit methods and the use of elas-295
tic meshes, these rigid constraints coupled with a quasi-static296
approach allow them to quickly compute a solution. Figure 6297
shows a table broken using this approach.298
Figure 6: Breaking table from Smith et al. [24]. (image copyright CGF 2001)
Mass-spring models and similar approaches are sometimes299
preferred because of their simplicity and faster results, which300
is especially true for real-time fracture. However, these ap-301
5

proaches suffer from several limitations in terms of mechanical302
behavior and visual quality. They do not provide a direct way303
of resisting shear or bending, and it is difficult to express im-304
portant material properties such as the stress-strain relationship.305
Furthermore, the exact location and orientation of the fracture306
are unknown, and fracture surfaces are often restricted to the307
boundaries in the initial mesh structure, exhibiting directional308
artifacts (Refer to Figure 4). As a result, these techniques can309
only realistically model effects that occur on a scale much larger310
than the inter-node spacing. Continuous models such as the311
Finite Element Method, as described in the following section,312
directly account for most of these issues.313
4.2. Finite element methods314
The Finite Element Methods (FEM) partition the model M315
into a set of disjoint elements (usually tetrahedrons). These el-316
ements join at discrete points, usually called node points. The317
FEM method proceeds by defining the problem on the finite set318
of node points, instead of on the original mesh, resulting in a319
set of algebraic equations that are solved numerically. Rather320
than solving a continuous problem, these methods look to solve321
the discrete positions of the node points. First, the unknown x322
is approximated by x =∑
i xibi, where xi are the positions of323
the node points and bi are fixed nodal basis functions that are324
1 at node i and 0 everywhere else. While replacing x in the325
above equations for motion results in a set of simpler algebraic326
equations, no sets of basis functions will yield the solution in327
the general case, so all methods aim at reducing the error in-328
troduced by the approximations employed. This approximation329
error is measured by replacing the resulting approximation into330
the original equations. One example is the Galerkin method331
[25] that treats finding xi as an optimization problem where the332
error is minimized. Refer to Swenson and Ingrafiea [26] for333
further theoretical details about Galerkin methods.334
In their pioneering work, Terzopoulos and Fleisher [2, 27]335
model viscoelastic, plastic and fracture behaviors based on a336
continuous formulation, where both FEM and finite differences337
are proposed for their discretization. One of their formulations338
is based on a hybrid decomposition of the model into rigid and339
deformable components which, in turn, improves the numeri-340
cal conditioning of rigid objects. This enables a wide range of341
deformable behaviors from highly elastic to nearly rigid to be342
covered, while fracture is shown on torn paper and cloth sheets.343
Later, O’Brien and Hodgins [28] propose a model that uses344
FEM with the theory, which has found widespread use in the345
graphics literature, developed by Griffith [29] and Irwin [30].346
Their approach is based on linear elastic fracture mechanics and347
non-linear finite element analysis, where 3D objects are repre-348
sented as tetrahedral elements, refer to Figure 7. A separation349
tensor is used to decide where and how fractures should appear350
or propagate. The separation tensor is built from tensile and351
compressive forces obtained from the stress tensor. Remeshing352
is finally applied in order to enable unconstrained crack paths,353
thus achieving high visual quality.354
The same approach has been applied to simulate shattering355
due to explosions [31] and later extended to incorporate plastic356
deformation [12, 8]. By means of an additive model, the total357
Figure 7: FEM discretization into tetrahedra. Surface (a) and object interior(b); O’Brien [28]. (image copyright ACM 1999)
strain is separated into elastic and plastic components, easily358
allowing the simulation of ductile fracture. Muller et al. [32]359
include a further co-rotational formulation that avoids visible360
artifacts during large deformations. As a result, the rotation on361
a per-element basis is factored out, allowing for linear deforma-362
tion analysis independent of rotation.363
For real-time purposes, common solutions rely on instanta-364
neous fracture models, which combine rigid bodies with quasi-365
static stress analysis [33, 34, 35]. Such a hybrid approach treats366
objects as rigid bodies between collisions, while using static367
FEM during collision events. Instantaneous fracture models368
can be appropriate for stiff materials, which tend to exhibit369
small deformations. However, the elastic stiffness matrix can370
have null spaces (rigid translations and rotations that do not de-371
form the model) that may affect computations. Muller et al. [33]372
address this issue by anchoring elements far from the collision373
event, while Bao et al. [34] directly identify and eliminate them374
during the solution; typically based on the conjugate gradient375
method. Refer to Figure 8 for an example of FEM-based frac-376
ture from [34]. In the context of sound simulation, Zheng and377
James [35] propose a sparse least-squares solver to produce378
fracture sounds at near audio rates, which they combine with379
Voronoi-based fracture patterns. Iben and O’Brien [36] use a380
quasi-static system for simulating elastic relaxation and shrink-381
age after cracking, while the stress field is defined heuristically,382
thus providing substantial control for the user in terms of the383
position and patterns of the cracks.384
Figure 8: An example of a FEM-based fracture with copious small shards; Baoet al. [34]. (image copyright IEEE 2007)
Methods based on quasi-static analysis are much cheaper385
than a fully dynamic simulation, but ignoring the elastic en-386
ergy released during fracture, which might produce unrealistic387
fracture patterns. Parker and O’Brien [37] propose a simplified388
version of previous FEM techniques [8, 32] for use in video-389
games and real-time simulations. Their approach relies on a390
6

linearized semi-implicit solver and a parallelized implementa-391
tion of the conjugate gradient method, where objects are parti-392
tioned into islands and processed independently. This leads to393
a fast and robust simulation of fracture on stiff and soft mate-394
rials. Another common approach is to use a simplified model,395
which can be embedded into the original mesh for the simula-396
tion [32, 38, 37], which allows the use of lower resolutions and397
simpler representations in order to obtain faster results without398
compromising visual quality. Refer to Figure 9 for a represen-399
tation of an embedded mesh.400
Figure 9: An embedded object mesh representation; Parker and O’Brien [37].The simulated mesh is based on tetrahedrons, while a triangle-based represen-tation models the final fracture patterns. (image copyright ACM 2009)
While continuous remeshing offers high visual quality it has401
many limitations in terms of performance and simulation sta-402
bility. Stability can be guaranteed by limiting the directions of403
cracks [28], but the model can easily grow in complexity and404
become computationally expensive. Wicke et al. [39] propose405
a conservative local re-meshing algorithm that tries to replace406
as few tetrahedra as possible. This maintains high tetrahedron407
quality and limits the accumulation of numerical error. For vi-408
sualization (and collision detection), they keep track of a sec-409
ond mesh which shares the topology with the simulation mesh,410
but introduce different nodal positions. The rendering mesh411
also needs to be remeshed to maintain an appropriate geometric412
quality. Refer to Figure 10 to see an example of re-meshing.413
Other approaches simply split the mesh along element bound-414
aries [33] or even remove whole elements [20, 40], which, while415
they can be very fast, compromise visual accuracy. Embed-416
ded methods may help in mitigating these effects, as the qual-417
ity of the simulation does not need to match the visual quality418
[37, 32, 38]. Molino et al. [41] propose a virtual node algorithm419
that relies on a lattice for modeling the extra geometry, which420
serves to avoid the generation of ill-conditioned elements. The421
material within an element is fragmented by creating several422
Figure 10: Adaptive mesh refinement helps a ball to crash through differentductile plates; Wicke et al. [39]. (image copyright ACM 2010)
replicas of the element and assigning a portion of material to423
each one. These elements can then be directly used for vi-424
sualization purposes. However, the geometry increases with425
both the subdivision and the added hidden nodes, thus affect-426
ing the performance. The approach by Molino et al. can be427
seen as a generalization of extended FEM (XFEM) [42], and428
has been used in other works [34] (see Figure 8). Level sets429
can be also very effective for handling topological changes, as430
demonstrated by Hegemann et al. [43]. Here, the level set is de-431
fined in the undeformed configuration of the object, and evolves432
in material space to represent the transition from undamaged to433
failed material. The tetrahedralization is done in a regular lat-434
tice and the elements are duplicated to handle both damaged435
and healthy regions. Refer to Figure 11 for an embedded mesh436
representation.437
Figure 11: Embedded Lagrangian mesh stages for their material; Hegemann etal. [43]. (image copyright SCM 2013)
4.3. Meshless methods438
Meshless methods appear as an alternative to enhance FEMs,where M is discretized in a set of points without connectivityinformation between them. In these methods, the value at anypoint in the interior of the body is retrieved through the inter-polation of these calculation points. Basically, if we have com-puted certain values ξi at the calculation points xi, we can obtainthis value at any other point x by computing
φ(x) =∑
i
ωri (x)ξi ,
where the ωri are a set of kernel functions that allow us to com-439
pute the interpolation at point x from the values ξi at points xi.440
Usually, these kernel functions depend on a parameter r that is441
1 at the evaluation point and goes to 0 at range r.442
7

There are a number of features of these methods that make443
them favorable for fracture simulation, such as avoiding the444
complex re-meshing operations and the problems associated to445
element cutting and mesh alignment common to FEM, as de-446
scribed in the work by Belytschko et al. [44]. In the field of447
mechanics, Sukumar et al. [45] proposed a particle-based ap-448
proach to model the physical behavior around a crack; while449
Belytschko and Tabbara [46] resort entirely to meshless meth-450
ods. The methods later developed in the field of computer451
graphics were based on these seminal works.452
Muller et al. [47] introduce a meshless framework for the453
animation of elastic and plastic deformation, which supports454
a wide range of materials. The spatial derivatives of the dis-455
placement field are computed using a Moving Least Squares456
(MLS) [48] procedure based on a linear basis. These deriva-457
tives are subsequently used to obtain strains, stresses and elastic458
forces at each simulated point. Topological changes are handled459
with resampling, in order to deal with undersampled and over-460
sampled regions. Pauly et al. [49] build from the method by461
Muller et al. to include brittle and ductile fractures, which is462
achieved by continuously adding surface samples during crack463
propagation and dynamically adapting the shape functions around464
them. Resampling is also conducted around the fracture sur-465
faces, as shown in Figure 12.466
Figure 12: Volume sampling: Octree decomposition (a), initial adaptive oc-tree sampling (b), sampling after local repulsion (c), and dynamic re-samplingduring fracture process (d); Pauly et al. [49]. (image copyright ACM 2005)
Liu et al. [50] propose a quasi-static solution for stiff ma-467
terials by treating brittle objects as fully rigid bodies. The lo-468
cal Petrov-Galerkin method (MLPG) [25] is used in order to469
avoid dealing with large neighborhoods of point masses, and a470
simple damage-based fracture model is proposed. This model471
clusters particles previously classified as damaged or undam-472
aged to generate the new fragments. Chen et al. [51] focus on473
a similar problem but using Smoothed Particle Hydrodynamics474
(SPH) [52]. Their formulation is used to analyze local stress475
tensors induced by collisions. Based on a tetrahedralization of476
the material, particles are linked with up to four neighborhood477
particles and fracture is simulated by breaking these links ap-478
propriately. A clustering approach is also conducted to group479
damaged points, in order to resample the point set before gener-480
ating the fracture surface. Even with the resampling, directional481
artifacts are easily spotted.482
Efficiently dealing with proximity information is paramount483
for meshless approaches. Preliminary approaches proposed the484
use of spatial hashing to retrieve neighboring points within a485
specific distance, or a local caching scheme for exploiting tem-486
poral coherence [47, 49]. Steinemann et al. [53] use a visibility487
graph instead, which is applied both for cutting and fracturing488
deformable objects. Figure 13 shows an object splitted using489
this approach.490
Figure 13: Pumpkins splitted into pieces, from Steinemann et al. [53]. (imagecopyright ACM 2006)
In terms of rendering, Pauly et al. [49] adapt a CSG ren-491
dering technique for point-sampled surfaces [54], while Liu et492
al. [50] embed a detailed triangle mesh into the particles, where493
the triangles move with the particles using the same rigid body494
parameters.495
Despite all the advantages of Meshless methods, the fact496
that essential boundary conditions cannot be as straightforwardly497
implemented as mesh-based methods can be a problem given498
that its shape functions are not interpolating. Eventually, the499
computational cost would be higher than in FEM. One thing500
these methods have in common is that again we find the disasso-501
ciation between the simulation representation and the geometry502
used for rendering (e.g., the rendering mesh). In general, these503
methods have to generate that mesh from the set of sampling504
points, and the number of points can grow in an unpredictable505
manner, which can pose serious problems to the process.506
4.4. Other approaches507
This section covers fracture methods that rely on physically-508
based approaches but do not belong to any of the above classi-509
fications.510
Glondu et al. [55, 56], for instance, use modal analysis to511
simulate real-time brittle fracture. They base the fracture initi-512
ation method on this analysis and use a fast energy-based frac-513
ture propagation algorithm. To generate the fragments and their514
geometric surfaces, they rely on an implicit representation that515
efficiently models the surfaces obtained. Refer to Figure 14 for516
a representacion of a crack propagation, from [55]. The gen-517
erated mesh is constructed by evaluating the type of fractured518
surface in a way very similar to a marching-tetrahedra algo-519
rithm; mean while the deviations of the cracks are handled with520
a noise function. As modal analysis uses an analytical solution521
for computing deformation, no integration method is necessary.522
As a result, modal analysis leads to very fast deformable simu-523
lations, although the range of deformation tends to be limited.524
Ning et al. [57] handle heterogeneous materials using a mov-525
able cellular automata (MCA) approach [58]. The object is dis-526
cretized into spherical particles, called the MCA, which react527
to the deformation. In order to obtain accurate simulations, a528
large number of automata are often needed, which results in a529
significant computational cost. Ning and colleagues use CUDA530
to achieve real-time performance.531
8

Figure 14: Propagation of one crack in a coarse mesh. The colored section rep-resents a fracture that cut the body straight through the physical mesh; Glonduet al. [55]. (image copyright IEEE 2012)
5. Geometry-based methods532
Geometry-based methods, also known as procedural tech-533
niques, are able to produce patterns of cracks and fractures that534
are visually plausible but without relying on the actual physical535
process or its accurate simulation. Physical simulation is of-536
ten considered to be computationally demanding and does not537
provide sufficient control over fracture propagation. Procedural538
methods, on the other hand, rely on tools that offer considerable539
control of the patterns of cracks obtained as well as the size and540
shape of the fragments. This often translates in the generation541
of customized patterns by means of a simple set of parameters.542
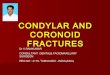
Figure 15: Real (left) and synthetic (right) bark; Lefebvre and Neyret [67].(image copyright The Eurographics Association 2002)
In the context of fragmentation induced by explosions, Neff543
and Fiume [59] propose a simple recursive pattern generator544
that divides a planar region into polygonal shards, where cracks545
fork according to a user-specified angle. Gobron and Chiba546
[60] propose a semi-physical approach to simulate cracks on547
layered surfaces. These layers are divided into cells and a 2D548
directional stress distribution is assigned to each one based on a549
set of geometric properties. Cracks then open based on a clas-550
sical stress threshold and propagate using a relaxation process551
and a set of heuristics. For rendering, the crack segments are552
projected onto the cells. Then, each cell crossed by a segment553
is divided into micro-cells, and these are used for anti-aliased554
rendering while taking into account shading and refraction ef-555
fects. A similar strategy has been used for propagating cracks556
on layered surfaces in the context of paint cracking and peeling557
[71]. Lefebvre and Neyret [67] also rely on a semi-physical ap-558
proach for bark generation, refer to Figure 15. They model the559
bark with a set of strips parallel to the growing direction, where560
the epidermal elements are treated as semi-rigid. The fracture561
criterion is based on the relative lengthening of elements and562
which corresponds to the Griffith energetic approach [29]. Once563
generated, the bark surface can be rendered directly from any564
viewpoint.565
Some authors focus on non-photorealistic (NPR) techniques566
for simulating cracking on images. Wyvill [70], for instance,567
simulates crack patterns on images of wax paintings, where568
their placement is based on a Distance Transformation along569
with a set of heuristics. Mould [72] simulates cracks by means570
of Voronoi regions and weighted edges. For rendering cracks,571
two approaches are proposed: texture transfer, which involves572
extracting the texture from one image for its application into573
another; and the modulation of an existing texture based on the574
distance from the crack locations. Figure 16 shows two crack575
patterns generated by this method.576
Figure 16: Different crack patterns by manipulating the site distributions, asshown in [72]. (image copyright ACM 2005)
Martinet et al. [61] propose an interactive approach for mod-577
eling both cracks and fractures on 3D objects. Their patterns are578
modeled using a set of skeletons that are applied onto the object579
by means of a set of Boolean operations. Cracks also include580
an associated profile curve that is swept along the pattern before581
its subtraction from the object. Once generated, fragments are582
converted into polygons for fast rendering. Refer to Figure 17583
for a comparison between a real object and a synthetic model.584
A similar representation is also used in [64], but storing the pat-585
terns into an atlas for their later application and animation.586
Figure 17: A real clay vase (left) and a synthetic model (right). Martinet et al.[61]. (image copyright IEEE 2004)
For real-time fracture, especially in computer games, a com-587
mon approach is to rely on pre-fracturing, also known as pre-588
scoring. Objects are fractured during the modeling stage, and589
9

Behavior 2D 3D Pre-fractured Not pre-fractured Voronoi Semi-physicalBrittle [59] [60] [61] [62] [63] [64] [65] [63] [66] [59] [60] [62] [63] [60] [67]
[67] [68] [64] [65] [66] [62] [69] [68] [67] [61] [66] [65] [68]Ductile [70] - - [70] - -
Table 1: Summary of geometry-based methods exposed in Section 5.
the pre-fractured versions replace the original objects based on590
impacts and similar events happening at run-time. This ap-591
proach is very fast and provides a lot of control for the artists,592
but the obtained patterns tend to be fixed. Most of these pat-593
terns habitually rely on a Voronoi partitioning of the object594
[65, 63, 66, 62], and are readily available in software such as595
Maya [73] or Houdini [74].596
In order to handle non-centered events, pre-fractured pat-597
terns can be aligned with specific locations or even adapted598
to a specific object or bounding-box [69, 62]. These patterns599
ease the modeling stage, as only a small set of (user-provided)600
generic fracture patterns is necessary, but it does require a dy-601
namic cutting of the mesh. In order to cut the mesh, Muller et602
al. [62] propose fast boolean operations while Oh et al. resort to603
recursive spatial decompositions [66]. The approach from Oh604
et al. further interconnects fragments as in [24], where connec-605
tions can be dynamically broken based on relative velocities.606
With respect to the visualization aspects, as with other meth-607
ods, Muller et al. [62] further relie on a second mesh for render-608
ing, represented by an approximate convex hull decomposition.609
Su et al. [69] incorporate a level set into the fractured object610
that is combined with the target object for collision purposes.611
The level set is triangulated by either fast dual-contouring or612
by marching cubes. Figure 18 shows an overview of the pre-613
fractured patterns aligniation proposed by [62].614
Figure 18: Overview of Muller et al. [62] fracture algorithm. (image copyrightACM 2013)
Along the same lines, Valette et al. [68] use pre-scoring for615
modeling cracks on soils. Cracks propagate inside a voxelized616
representation of the terrain according to a precomputed pattern617
of paths, where shrinkage is incorporated to guide the progres-618
sion. Rendering is performed by transforming the terrain into619
a mesh, and then incorporating the cracks as surface polygons.620
An interesting aspect of this work is its validation against real621
patterns. The validation is based on a set of statistics taken over622
area densities and the length and connectivity of these patterns,623
which could be used for validating other methods.624
In order to avoid expensive physical computations authors625
tend to bank on a procedural technique. However, the freedom626
to make some assumptions and provide the user with tools to627
control and guide the processes, can bring physical limitations628
with non-real behaviors and visual limitations. To avoid some629
of these assumptions, an example-based method could be ap-630
plied, where the idea is to extract information from examples in631
order to reproduce or guide the fracture. Refer to Section 6 for632
further details.633
Given the large variety of procedural solutions, Table 1 sum-634
marizes the various papers that were presented in this section635
and classified according to different criteria. This includes sim-636
ulated behavior (brittle vs. ductile), whether they are 2D or 3D,637
pre-fractured or not, based on a Voronoi diagram, and whether638
they rely on a semi-physical approach. Notice how ductile frac-639
ture has barely been addressed in this context.640
6. Example-based methods641
Example-based techniques build from both Computer Vi-642
sion and Computer Graphics fields. In the case of cracks and643
fractures, the purpose is to use real examples, often in the form644
of photographs, to obtain similar patterns or to guide the fractur-645
ing process itself. For a comprehensive review of image-based646
techniques we refer the reader to Shum and Kang [75].647
The direct mapping of crack patterns onto 3D models has648
been addressed by Hsien-Hsi and Wen-Kai [76]. Given an im-649
age of a crack pattern, they vectorize the image and extract the650
corresponding pattern in the form of a graph. The graph can651
then be interactively projected onto the surface from a parabolic652
bounding volume, rendered as two projected quads for each653
crack edge, and enhanced with bump mapping. Note that other654
procedural techniques could also be useful for mapping crack655
patterns [61, 64]. Wang et al. [77] focus on reconstructing656
tree bark from an input image, where bark features are seg-657
mented using texton analysis. An interactive system is pro-658
posed to transform these features into a height-field represen-659
tation, which is then used for rendering.660
Figure 19: Paint cracking, with context of paint thickness on a frog; [78]. (im-age copyright ACM 2007)
Texture synthesis is a standard practice for mapping gen-661
eral example-based textures [79]. Synthesis techniques may662
rely on many types of input data and can be performed in both663
space and time. Enrique et al. [80], for instance, rely on time-664
lapse images to synthesize temporal phenomena including paint665
10

Figure 20: Overview of the optimization process from [81]. Parameter vectorp is optimized iteratively. After each simulation, the statistics of the simulationare compared to the statistics of the reference image. (image copyright TheAuthors 2012)
cracking. Lu et al. [78] resort to similar data but to analyze666
how these phenomena might be influenced by a set of context667
parameters. These parameters are measured during the acqui-668
sition process and include local geometrical properties of the669
object. Given a target 3D object, these kinds of properties serve670
to guide the placement of features like cracks. Refer to Figure671
19 for an example.672
More recently, Glondu et al. [81] proposed using real ex-673
amples to guide a physical simulation of fracture. Rather than674
matching the input pattern, they focus on matching a set of675
statistics captured from the example. By means of a user study,676
they evaluate which statistics are more relevant for visual simi-677
larity, using measures similar to [68]. Using an extension from678
[55], these statistics are then used in an inverse procedure to679
estimate the simulation parameters that generate such patterns.680
Refer to Figure 20 for an overview of this process.681
7. Conclusions682
It is well known that creating good and realistic motion,683
whatever the field of application, is a challenging task due to684
its complexity. Our survey addresses the particular problem of685
simulating and animating cracks and fractures, and provides a686
survey of the most relevant techniques proposed in the litera-687
ture.688
There is no single generic solution or representation that689
can cover all cases well because the behavior of each mate-690
rial can vary in various ways, depending on multiple factors.691
Thus, our classification is based on the way the simulation of692
these phenomena is performed. One section was dedicated to693
physically-based works, which can be classified according to694
the simulation method. A further section was dedicated to those695
approaches that renounce physical accuracy preferring to select696
a procedural technique in order to gain a more interactive ap-697
plication. The final classifications focus on approaches based698
on examples (i.e., data, images, etc). Theses approaches are699
looking to replicate observed patterns, consequently avoiding700
tedious physical experiments and computations.701
We can see that FEM methods are some of the most pop-702
ular techniques, while meshless approaches are gaining more703
and more relevance. This is surely because of their ability to704
correctly represent cracks and fracture patterns. Models derived705
from the equations of continuum mechanics are important as it706
is possible to quantify the precision of the simulation, since the707
parameters of the model can be obtained from experiments con-708
ducted on real world objects, even if it is not trivial to obtain all709
the necessary quantities. Some authors, on the other hand, still710
prefer to work on representations that limit their accuracy but711
provide the user with more freedom and interactivity. Geomet-712
ric approaches are one such example.713
In Table 2, we provide a comparison of the main techniques714
reviewed in this paper; which can help the reader to easily eval-715
uate the differences between them. For each method, we report716
the dimensions the method operates on, the underlying repre-717
sentation, the simulated behavior, the method or solver used718
by the technique, and the estimated performance. The latter719
represents the speed of a method on simulating a fracture pat-720
tern, where a higher number of dots represents a better perfor-721
mance/speed. This classification is roughly based on timings722
provided by the authors as well as other considerations such723
as model size or hardware specifications. Methods with higher724
performance (5 dots) are able to simulate fractures in the order725
of a few milliseconds, while slower methods (1 dot) may take726
several seconds or minutes. Please note that this performance727
can only be considered as a very rough indication of the real728
performance. The timings reported by these methods depend729
on many aspects, including the parameters chosen for the simu-730
lations, the numerical approach, the number of iterations, or any731
code optimizations. The main purpose of this score is thus to732
provide an intuitive way to compare their behavior rather than733
a precise estimation.734
Finally, we devise some current challenges and open prob-735
lems regarding the simulation of fracture in Computer Graph-736
ics.737
Scalability. Despite recent advances in the field, physically-738
based methods are still too time consuming to deal with large739
scenes. Real-time approaches either rely on fast geometric ap-740
proaches or on reducing the physical accuracy to obtain greater741
performance. Even with these approximations, the complexity742
of the simulated objects is still limited, so there is a need to deal743
with very complex scenes such as outdoor scenarios.744
Parameter tweaking. Obtaining a specific pattern often745
implies trial and error of the parameters offered by each method,746
which can be tedious for artists. Image-based methods are able747
to directly map real patterns onto the objects, although they748
often lack physical validity. There is a need to provide more749
intuitive ways to edit these patterns and to capture them from750
measured data. A recent approach [81] represents a first step751
towards combining both approaches and capturing such param-752
eters from images, although there is still a great deal of room753
for improvement.754
Fracture Surface. Generating fracture surface is an impor-755
tant challenge that needs specific solutions. Little of the pre-756
11

Type/Method Dim. Representation Behavior Method/Solver PerformanceMass-spring[16] 3D deformed lattices brittle Euler n/a[17] 2D two-layer brittle n/a ••
[18] 3D lattice (cubic cells) brittle n/a ••
[21] 3D tetrahedra brittle finite diff (moisture) + quantum mechanics ••
[22] 3D interconnected voxels brittle Euler ••••
[23] 3D arbitrarily shaped voxels brittle Euler •••••
[24] 3D lattice w/ rigid constraints brittle quasi-static •••
FEM[2] 2D mesh ductile semi-implicit n/a[28, 8] 3D tetrahedra brit./duct. Euler or 2nd-order Taylor •
[33] 3D tetrahedra brittle rigid body (Euler) + quasi-static ••••
[20] 2.5D wedge elements brittle static •
[41] 2D/3D thin sells/tetrahedra ductile Newmark ••
[32] 3D tetrahedra ductile implicit Euler ••••
[38] 3D surface + cube mesh brittle implicit Euler •••
[34] 3D mesh/tetrahedra + level set ductile rigid body + quasi-static •••
[36] 2D triangle mesh brittle Euler ••
[37] 3D tetrahedra ductile backward Euler •••••
[35] 3D tetrahedra brittle quasi-static •
[43] 3D tetrahedra + level set ductile Euler •••
Meshless[47] 2D/3D point-based ductile Leap-Frog / implicit •••
[49] 3D point-based + surfels ductile Leap-Frog •••
[50] 3D point-based + mesh brittle quasi-static (Local Petrov-Galerkin) ••
[51] 3D point-based + tetrahedra brittle SPH ••••
Others[57] 3D spherical particles brittle movable cellular automata ••••
[55] 3D mesh + implicit brittle modal analysis •••••
Geometry-based[59] 2D flat mesh + grid brittle iterative propagation •••
[60] 2.5D mesh + multi-layer cells brittle cellular automata ••
[67] 2.5D bark slices brittle procedural + quasi-static ••
[72] 2D image - Voronoi ••••
[61] 2D/3D mesh + implicit brittle manual + boolean operations ••••
[64] 2.5D mesh + implicit brittle manual + boolean operations ••
[70] 2D image ductile distance transform •••••
[68] 2.5D height map + implicit brittle quasi-static + precomputed paths •••
[69] 3D mesh + level set brittle pre-scoring •••••
[66] 3D mesh brittle recursive decomposition + SPH •••
[62] 3D mesh brittle pre-scoring + convex decomposition ••••
Example-based[77] 2.5D image - texton analysis + user assistance ••
[76] 2D image - vectorization + projection n/a[78] 2D mesh + texture - texture synthesis •
[81] 3D mesh + implicit brittle optimization + simulation •••
Table 2: Comparison between different fracture methods. Refer to the text for a detailed description.
vious work has resolved this problem in an elegant way. For757
instance, in FEM methods, element cutting and local remesh-758
ing are time consuming and may lead to sliver elements. Even759
the use of virtual nodes cannot be regarded as a perfect defini-760
tive solution. In general, they all have artifacts that appear and761
that are related to the size of elements. Hence, there is still a762
pending issue crucial to this point.763
Validation. Fracture methods proposed in Computer Graph-764
ics are rarely validated against real physical data or even from a765
perceptual point of view. This is common for most simulation766
approaches as well as aging/weathering techniques [4]. Some767
of the very few works that deal with validation are Valette et768
12

al. [82], who compare their patterns obtained in lab conditions769
against real patterns, or Ramanarayanan et al. [83], who pro-770
vided a framework to link physically accurate to visually accu-771
rate models using a Visual Equivalence Predictor. Having a set772
of standard tests based on real-life examples could clearly help773
here.774
Implementation. Developing a fracture technique often775
implies starting from scratch and the techniques available are776
rarely made public. This also makes the comparison with pre-777
vious approaches much more difficult. Given the complexity778
of some of these methods, promoting the availability of such779
techniques and the reusability of libraries would help to further780
advance the field.781
Fracture simulation is still a very active research area, and782
we believe this will continue to be so in the future. Given its783
applications in many areas, there is a lot of interest in develop-784
ing new techniques that offer more realism and greater interac-785
tivity. In this survey, we have revised the state-of-the-art in the786
field and we have provided insights on its present circumstances787
as well as on some of the problems that still have to be faced.788
We hope this field will further evolve and provide us with more789
exciting results.790
Acknowledgements791
We would like to thank the anonymous reviewers for their792
valuable comments. This work was partially funded by the793
TIN2013-47137-C2-2-P project from Ministerio de Economıa794
y Competitividad, Spain, and a Beatriu de Pinos grant from the795
Catalan Government, Spain.796
Bibliography797
[1] Gibson, S.F., Mirtich, B.. A survey of deformable modeling in computer798
graphics. Tech. Rep. TR-97-19; MERL, Cambridge, MA; 1997.799
[2] Terzopoulos, D., Fleischer, K.. Modeling inelastic deforma-800
tion: Viscolelasticity, plasticity, fracture. SIGGRAPH Comput Graph801
1988;22(4):269–278.802
[3] Nealen, A., Muller, M., Keiser, R., Boxerman, E., Carlson, M.. Physi-803
cally Based Deformable Models in Computer Graphics. Computer Graph-804
ics Forum 2006;25(4):809–836.805
[4] Merillou, S., Ghazanfarpour, D.. A survey of aging and weathering phe-806
nomena in computer graphics. Computers & Graphics 2008;32(2):159–807
174.808
[5] Glondu, L.. Physically-based and real-time simulation of brittle fracture809
for interactive applications. Ph.D. thesis; INRIA Rennes - Ens Cachan,810
France; 2012.811
[6] Bonet, J., Wood, R.. Nonlinear Continuum Mechanics for Finite Element812
Analysis. Cambridge University Press; 2008. ISBN 9781139467544.813
[7] Chakrabarty, J.. Theory of Plasticity. Elsevier Science; 2006. ISBN814
9780080481364.815
[8] O’Brien, J.F., Bargteil, A.W., Hodgins, J.K.. Graphical model-816
ing and animation of ductile fracture. ACM Transactions Graphics817
2002;21(3):291–294.818
[9] Beer, F., Jr. Johnston, E., DeWolf, J., Mazurek, D.. Mechanics of819
Materials. McGraw-Hill Education; 2011. ISBN 9780073380285.820
[10] Wikipedia, . Stressstrain curve. 2014. [accessed 14-August-2014]; URL821
http://en.wikipedia.org/wiki/Stress-strain curve.822
[11] von Mises, R.. Mechanik der festen Korper im plastisch- deformablen823
Zustand. Nachrichten von der Gesellschaft der Wissenschaften zu824
Gottingen, Mathematisch-Physikalische Klasse 1913;1913:582–592.825
[12] O’Brien, J.F., Hodgins, J.K.. Animating fracture. Commun ACM826
2000;43(7):68–75.827
[13] Hairer, E., Nørsett, S., Wanner, G.. Solving Ordinary Differential Equa-828
tions I Nonstiff problems. Springer; 2000.829
[14] Atkinson, K.E.. An Introduction to Numerical Analysis. New York:830
Wiley; 1978.831
[15] Petroski, H.. Invention by design : How Engineers Get from Thought to832
Thing. Harvard University Press,; 1996.833
[16] Norton, A., Turk, G., Bacon, R., Gerth, J., Sweeney, P.. Animation of834
fracture by physical modeling. The Visual Computer 1991;7:210–219.835
[17] Hirota, K., Tanoue, Y., Kaneko, T.. Generation of crack patterns with a836
physical model. The Visual Computer 1998;14(3):126–137.837
[18] Hirota, K., Tanoue, Y., Kaneko, T.. Simulation of three-dimensional838
cracks. The Visual Computer 2000;16:371–378.839
[19] Federl, P., Prusinkiewicz, P.. A texture model for cracked surfaces,840
with an application to tree bark. In: In Proceedings of Western Computer841
Graphics Symposium. 1996, p. 23–29.842
[20] Federl, P., Prusinkiewicz, P.. Modelling fracture formation in bi-layered843
materials, with applications to tree bark and drying mud. In: In Proceed-844
ings of Western Computer Graphics Symposium. 2002, p. 29–35.845
[21] Aoki, K., Dong, N.H., Kaneko, T., Kuriyama, S.. Physically based sim-846
ulation of cracks on drying 3d solids. Computer Graphics International847
Conference 2004;:357–364.848
[22] Mazarak, O., Martins, C., Amanatides, J.. Animating exploding objects.849
In: In Proceedings of Graphics Interface. Morgan Kaufmann Publishers850
Inc; 1999, p. 211–218.851
[23] Martins, C., Buchanan, J., Amanatides, J.. Visually believable explo-852
sions in real time. Computer Animation, 2001 The Fourteenth Conference853
on Computer Animation Proceedings 2001;.854
[24] Smith, J., Witkin, A.P., Baraff, D.. Fast and controllable simulation of855
the shattering of brittle objects. Comput Graph Forum 2001;20(2):81–90.856
[25] Mikhlin, S.. Variational methods in mathematical physics. International857
series of monographs in pure and applied mathematics; Pergamon Press;858
[distributed by Macmillan, New York]; 1964.859
[26] Swenson, D.V., Ingrafiea, A.R.. Modeling mixed-mode dynamic crack860
propogation using finite elements- theory and applications. vol. 3. 1988,861
p. 381–397.862
[27] Terzopoulos, D., Fleischer, K.. Deformable models. The Visual Com-863
puter 1988;4(6):306–331.864
[28] O’Brien, J., Hodgins, J.. Graphical model and animation of brittle frac-865
ture. In: In Proceedings of SIGGRAPH’99. 1999, p. 137–146.866
[29] Griffith, A.. The Phenomena of Rupture and Flow in Solids. Philosophi-867
cal Transactions of the Royal Society, London 1921;A221:163–198.868
[30] Irwin, G.R.. Analysis of Stresses and Strains Near the End of a Crack869
Traversing a Plate. J Appl Mech 1957;.870
[31] Yngve, G.D., O’Brien, J.F., Hodgins, J.K.. Animating explosions. In:871
Proceedings of ACM SIGGRAPH 2000. 2000, p. 29–36.872
[32] Muller, M., Gross, M.. Interactive virtual materials. In: GI ’04- Pro-873
ceedings of Graphics Interface 2004. 2004, p. 239–246.874
[33] Muller, M., McMillan, L., Dorsey, J., Jagnow, R.. Real-time simu-875
lation of deformation and fracture of stiff materials. In: Proceedings of876
the Eurographic workshop on Computer animation and simulation. New877
York, NY, USA: Springer-Verlag New York, Inc. ISBN 3-211-83711-6;878
2001, p. 113–124.879
[34] Bao, Z., Hong, J.M., Teran, J., Fedkiw, R.. Fracturing rigid materials.880
IEEE Trans Vis Comput Graph 2007;13(2):370–378.881
[35] Zheng, C., James, D.L.. Rigid-body fracture sound with precom-882
puted soundbanks. ACM Transactions on Graphics (Proceedings of SIG-883
GRAPH 2010) 2010;29(3).884
[36] Iben, H.N., O’Brien, J.F.. Generating surface crack patterns. Graph885
Models 2009;71:198–208.886
[37] Parker, E.G., O’Brien, J.F.. Real-time deformation and fracture in a game887
environment. In: Symposium on Computer Animation. ACM; 2009, p.888
165–175.889
[38] Muller, M., Teschner, M., Gross, M.. Physically-based simulation890
of objects represented by surface meshes. In: Proc. Computer Graphics891
International. 2004, p. 156–165.892
[39] Wicke, M., Ritchie, D., Klingner, B.M., Burke, S., Shewchuk, J.R.,893
OBrien, J.F.. Dynamic local remeshing for elastoplastic simulation.894
ACM Trans Graph 2010;29:49–1–49–11.895
[40] Federl, P., Prusinkiewicz, P.. Finite element model of fracture formation896
on growing surfaces. In: In Proceedings of International Conference on897
Computational Science. 2004,.898
13

[41] Molino, N., Bao, Z., Fedkiw, R.. A virtual node algorithm for changing899
mesh topology during simulation. ACM Trans Graph 2004;23:385–392.900
[42] Moes, N., Dolbow, J., Belytschko, T.. A finite element method for crack901
growth without remeshing. International Journal for Numerical Methods902
in Engineering 1999;:131–150.903
[43] Hegemann, J., Jiang, C., Schroeder, C., Teran, J.M.. A level set904
method for ductile fracture. In: Proceedings of the 12th ACM SIG-905
GRAPH/Eurographics Symposium on Computer Animation. SCA ’13;906
New York, NY, USA: ACM; 2013, p. 193–201.907
[44] Belytschko, L.T., Organ, D., Krongauz, Y.. A coupled finite element- el-908
ementfree galerkin method. Computational Mechanics 1995;17(3):186–909
195.910
[45] Sukumar, N., Moran, B., Black, T., Belytschko, L.T.. An element-911
free galerkin method for three-dimensional fracture mechanics. Compu-912
tational Mechanics 1997;:170–175.913
[46] Belytschko, L.T., Tabbara, M.. Element-free galerkin method for wave914
propogation and dynamic fracture. Computer Methods in Applied Me-915
chanics and Engineering 1995;126(1-2):131–153.916
[47] Muller, M., Keiser, R., Nealen, A., Pauly, M., Gross, M., Alexa, M..917
Point based animation of elastic plastic and melting objects. In: Proceed-918
ings of the 2004 ACM SIGGRAPH/Eurographics symposium on Com-919
puter animation. SCA 2004; Eurographics Association. ISBN 3-905673-920
14-2; 2004, p. 141–151.921
[48] Levin, D.. The approximation power of moving least-squares. Math922
Comput 1998;67(224):1517–1531.923
[49] Pauly, M., Keiser, R., Adams, B., Dutre, P., Gross, M., Guibas,924
L.J.. Meshless animation of fracturing solids. ACM Trans Graph925
2005;24(3):957–964.926
[50] Liu, N., He, X., Li, S., Wang, G.. Meshless simulation of brittle927
fracture. Journal of Visualization and Computer Animation 2011;22(2-928
3):115–124.929
[51] Chen, F., Wang, C., Xie, B., Qin, H.. Flexible and rapid anima-930
tion of brittle fracture using the smoothed particle hydrodynamics for-931
mulation. Journal of Visualization and Computer Animation 2013;24(3-932
4):215–224.933
[52] Gingold, R.A., Monaghan, J.J.. Smoothed particle hydrodynamics -934
Theory and application to non-spherical stars. Mon Not Roy Astron Soc935
1977;181:375–389.936
[53] Steinemann, D., Otaduy, M.A., Gross, M.. Fast arbitrary split-937
ting of deforming objects. In: Proceedings of the 2006 ACM SIG-938
GRAPH/Eurographics symposium on Computer animation. SCA ’06; Eu-939
rographics Association; 2006, p. 63–72.940
[54] Wicke, M., Teschner, M., Gross, M.H.. Csg tree rendering for point-941
sampled objects. In: Pacific Conference on Computer Graphics and Ap-942
plications. IEEE Computer Society; 2004, p. 160–168.943
[55] Glondu, L., Marchal, M., Dumont, G.. Real-time simulation of brittle944
fracture using modal analysis. IEEE Transactions on Visualization and945
Computer Graphics 2013;19(2):201–209.946
[56] Glondu, L., Schvartzman, S.C., Marchal, M., Dumont, G., Otaduy,947
M.A.. Fast collision detection for fracturing rigid bodies. IEEE Transac-948
tions on Visualization and Computer Graphics 2013;99(PrePrints):1.949
[57] Ning, J., Xu, H., Wu, B., Zeng, L., Li, S., Xiong, Y.. Modeling950
and animation of fracture of heterogeneous materials based on cuda. The951
Visual Computer 2013;29(4):265–275.952
[58] Psakhie, S., Horie, Y., Korostelev, S., Smolin, A., Dmitriev, A.,953
Shilko, E., et al. Method of movable cellular automata as a tool for954
simulation within the framework of mesomechanics. Russian Physics955
Journal 1995;38(11):1157–1168.956
[59] Neff, M., Fiume, E.. A visual model for blast waves and fracture. In: In957
Proc. of Graph. Interface. 1999, p. 193–202.958
[60] Gobron, S., Chiba, N.. Crack pattern simulation based on 3d surface959
cellular automaton. The Visual Computer 2001;17:287–309.960
[61] Martinet, A., Galin, E., Desbenoit, B., Hakkouche, S.. Procedural mod-961
eling of cracks and fractures. In: Shape Modelling International (Short962
Paper ). Genova, Italy; 2004, p. 346–349.963
[62] Muller, M., Chentanez, N., Kim, T.Y.. Real time dynamic fracture964
with volumetric approximate convex decompositions. ACM Trans Graph965
2013;32(4):115:1–115:10.966
[63] Hellrung, J., Selle, A., Shek, A., Sifakis, E., Teran, J.. Geometric967
fracture modeling in bolt. In: ACM SIGGRAPH Talks (Sketch). 2009,.968
[64] Desbenoit, B., Galin, E., Akkouche, S.. Modeling cracks and fractures.969
The Visual Computer 2005;21(8-10):717–726.970
[65] Raghavachary, S.. Fracture generation on polygonal meshes using971
voronoi polygons. In: ACM SIGGRAPH 2002 Conference Abstracts and972
Applications. New York, NY, USA: ACM; 2002, p. 187–187.973
[66] Oh, S., Shin, S., Jun, H.. Practical simulation of hierarchical brittle974
fracture. Journal of Visualization and Computer Animation 2012;23(3-975
4):291–300.976
[67] Lefebvre, S., Neyret, F.. Synthesizing bark. In: Gibson, S., De-977
bevec, P.E., editors. 13th Eurographics Workshop on Rendering Tech-978
niques (EGSR ’02); vol. 28. Pisa, Italy: Eurographics Association; 2002,979
p. 105 – 116.980
[68] Valette, G., Prevost, S., Lucas, L., Leonard, J.. A dynamic model of981
cracks development based on a 3d discrete shrinkage volume propagation.982
Comput Graph Forum 2007;27(1):47–62.983
[69] Su, J., Schroeder, C., Fedkiw, R.. Energy stability and fracture for984
frame rate rigid body simulations. In: Proceedings of the 2009 ACM SIG-985
GRAPH/Eurographics Symposium on Computer Animation. New York,986
NY, USA: ACM; 2009, p. 155–164.987
[70] Wyvill, B., van Overveld, K., Carpendale, S.. Rendering cracks in batik.988
In: Proceedings of the 3rd international symposium on Non-photorealistic989
animation and rendering. NPAR ’04; New York, NY, USA: ACM. ISBN990
1-58113-887-3; 2004, p. 61–149.991
[71] Paquette, E., Poulin, P., Drettakis, G.. The simulation of paint cracking992
and peeling. In: Graphics Interface 2002. 2002, p. 59–68.993
[72] Mould, D.. Image-guided fracture. In: GI ’05- Proceedings of Graphics994
Interface 2005. 2005, p. 219–226.995
[73] Fracture FX. 2014. URL http://www.fracture-fx.com.996
[74] Houdini. 2014. URL http://www.sidefx.com.997
[75] Shum, H., Kang, S.B.. Review of image-based rendering techniques.998
Proc SPIE 2003;4067:2–13.999
[76] Hsien-Hsi, H., Wen-Kai, T.. A straightforward and intuitive approach on1000
generation and display of crack-like patterns on 3d objects. In: Computer1001
Graphics International. 2006, p. 554–561.1002
[77] Wang, X., Wang, L., Liu, L., Hu, S., Guo, B.. Interactive modeling of1003
tree bark. 11th Pacific Conference on Computer Graphics and Applica-1004
tions 2003;.1005
[78] Lu, J., Georghiades, A.S., Glaser, A., Wu, H., Wei, L.Y., Guo, B.,1006
et al. Context-aware textures. ACM Trans Graph 2007;26(1):3.1007
[79] Wei, L.Y., Lefebvre, S., Kwatra, V., Turk, G., et al. State of the art in1008
example-based texture synthesis. In: Eurographics 2009, State of the Art1009
Report, EG-STAR. 2009, p. 93–117.1010
[80] Enrique, S., Koudelka, M., Belhumeur, P., Dorsey, J., Nayar, S.,1011
Ramamoorthi, R.. Time-varying textures: definition, acquisition, and1012
synthesis. In: ACM SIGGRAPH 2005 Sketches. ACM; 2005, p. 130.1013
[81] Glondu, L., Muguercia, L., Marchal, M., Bosch, C., Rushmeier, H.,1014
Dumont, G., et al. Example-based fractured appearance. Computer1015
Graphics Forum 2012;31(4):1547–1556.1016
[82] Valette, G., Herbin, M., Lucas, L., Leonard, J.. A preliminary approach1017
of 3d simulation of soil surface degradation by rainfall. In: NPH. 2005,1018
p. 41–49.1019
[83] Ramanarayanan, G., Ferwerda, J., Walter, B., Bala, K.. Visual equiv-1020
alence: Towards a new standard for image fidelity. ACM Trans Graph1021
2007;26(3).1022
14