Embed Size (px)
Citation preview

8/3/2019 Geometrija UM
http://slidepdf.com/reader/full/geometrija-um 1/7
Improving the Technical Quality of a Universal Motor
Using an Evolutionary Approach
Barbara Koroušić-Seljak, Gregor Papa Boris Benedič ič , Tomaž Kmecl Computer Systems Department Strategic R&D Department
"Jožef Stefan" Institute Domel d.d.Jamova 39, 1000 Ljubljana, Slovenia Otoki 21, 4228 Železniki, Slovenia
E-mail: [email protected] , E-mail: [email protected] ,[email protected] [email protected]
Abstract
This paper presents a new procedure for designing the
rotor and the stator of a universal motor for home
appliances that is based on a genetic algorithm (GA).
The GA was employed in order to optimize the
independent geometric parameters of the rotor/stator
lamination with the aim to reduce the main motor's
power losses, i.e. the losses occurring in the iron and the
copper. Using this procedure the motor's technical
quality, expressed as efficiency (i.e. the ratio of the
motor's output power to its input power), can be
significantly improved. The GA proved to be a simple
and efficient search-and-optimization method for solving this day-to-day design problem in industry. It
significantly outperformed a conventional 'direct' design
procedure that had been used before.
1. Introduction
Most home appliances with small motors, such as vacuumcleaners or mixers, are driven by a universal motor (Fig.1). This is an AC series motor in which the samecurrent passes through both the armature windings (rotor)and the field-excitation windings (stator) (Fig.2). A
universal motor can operate either with an AC or a DC power supply.Because of the widespread use of the universal motor,
it is very important that the energy consumption of themotor (input power) is as low as possible, while stillsatisfying the needs of the user (output power). Hence weneed to improve the technical quality or efficiency of theuniversal motor, which is defined as the ratio of output power to input power. The efficiency depends on variouslosses, these include iron losses, copper losses as well as
Figure 1. Universal motor used in vacuum cleaners.
brush losses, friction losses and ventilation losses. Theiron losses include the hysteresis losses and the eddy-current losses, primarily in the armature core and in thesaturated parts of the stator core. The copper losses arethe joule losses in the windings of the stator and the rotor.
Figure 2. Rotor and stator parts of a universal
motor used in home appliances.

8/3/2019 Geometrija UM
http://slidepdf.com/reader/full/geometrija-um 2/7
The main losses, i.e. those from the iron and thecopper, can be reduced by optimizing the geometry of therotor and stator. Because of the high magnetic saturation
of the iron in universal motors, this is a highly non-linear problem. Due to the complexity of the solutionoriginating in this non-linearity, the GA [1] was used tooptimize the geometry of the rotor and stator.
2. Geometry of the Rotor and the Stator
The geometry of the rotor and the stator was defined parametrically. There were three parameter types (shownin Fig.3 and Fig.4): Invariable (constant): Among several constant
parameters one was extremely important from themotor-manufacturer’s point of view, namely the
stator's outer radius. This roughly defined the amountof material (iron and copper) used for the motor andconsequently also the price of the motor. By holdingthe amount of material constant during theoptimization, all the optimized motor solutions had asimilar mass.
Variable:- Mutually independent : like the external radius of the rotor, the rotor-pole width, the rotor-jag diameter,the stator-jag radius, etc.- Dependent : e.g. the stator's inner radius. Thesewere defined indirectly from the constant and theindependent parameters.
Only mutually independent variable parameters werealtered using the GA.
3. Design Procedure for the Rotor and the
Stator
In a conventional (‘direct’) motor design procedure the
initial estimation of the geometry of the rotor and thestator is based on experience. The appropriateness of thisgeometry is then usually analyzed by means of anumerical simulation of the electromagnetic field. In our case, the analysis was performed with ANSYScommercial software [2], which applies a finite-elementmethod with an automatic finite-element mesh generation.When the results of the numerical simulation show aninconvenient electromagnetic field structure, the ‘direct’design procedure is repeated until the motor geometry isoptimized.
The new motor design procedure described in this paper is also a ‘direct’ system, but it is based on the GA.
This is a stochastic process providing a robust and yetflexible search in the wide and complex space of the problem solutions in order to find the optimum globalsolution in a short time. The concept of the applied designsystem can be roughly explained as follows (see Fig.5):the GA provides a set of problem solutions (i.e. differentconfigurations of rotor-and-stator independentgeometrical parameters). To enable the calculation of afitness value, each geometrical configuration is analyzedusing the finite-element program. After the calculation of the fitness, the reproduction of individuals and theapplication of genetic operators to a new population are
Detail A
Figure 4. Geometrical parameters of the rotor.
Figure 3. Geometrical parameters of the stator.

8/3/2019 Geometrija UM
http://slidepdf.com/reader/full/geometrija-um 3/7
made. The GA repeats this procedure until a predefinednumber of iterations are accomplished.
4. Calculation Of Copper, Iron And Other
Losses
In order to solve the electromagnetic problem, the finite-
element program needs the following data: well-defined geometry of the analyzed element, appropriate finite-element mesh, material properties (iron B-H function, copper
specific resistance), density of the electric current in the conductor area.
A typical run for such a numerical problem takes about30 iterations and needs approximately 7 minutes on aPentium III Computer Station to achieve a convergentnumerical solution. The result of the solution is amagnetic vector potential on every node of the finite-element mesh. From this potential we can calculate thevalues of flux density, field strength, and magnetic
energy. With a special module, we can also calculate theelectromagnetic torque on selected regions (rotor). Theoutput power of a motor is a product of theelectromagnetic torque and the angular velocity.
4.1. Calculation of copper losses
Copper losses per slot (stator and rotor) are calculated bythe following equations:
A
N I J
⋅= (1)
turnCuSlot l A J R I P ⋅⋅⋅=⋅= ρ
22
(2)
J .......... current density I........... current N .........number of turns A.......... slot area ρ ..........specific resistance of copper turn........ length of winding turn
The overall copper losses are as follows:
∑=i
iCuSlot Cu P P , (3)
4.2. Calculation of iron losses
Because of the nonlinear magnetic characteristic, the iron-loss calculation is less exact. The iron losses are separatedinto two components: the hysteresis loss and the eddy-current loss. An empirical formula for the hysteresis lossis defined as follows:
m f Bk P n
hh⋅⋅⋅= (4)
k h .........eddy-current material constant at 50 Hz B.......... maximum magnetic flux density f........... frequencym .........massn .......... exponent between 1.6 and 2.0 (material
dependent)
The eddy-current loss is defined as follows:
m f Bk P ee
⋅⋅⋅=22 (5)
k e .........hysteresis material constant at 50 Hz
The frequency of the magnetic field density in a stator is 50 Hz (the frequency of the power supply), while in a
rotor the frequency is much higher and depends on themotor's speed. If the motor was running at 50.000 min-1,the main rotor frequency would be 833 Hz. Since theeddy-current losses depend on the square of thefrequency, and the hysteresis losses increase linearly withthe frequency, the main iron losses of the rotor are theeddy-current losses. Since these losses depend on thesquare of the flux density, and the hysteresis losses in therotor are neglected, the iron losses of the rotor can becalculated using (5), where B
2 is obtained from the finite-element solution for each node.
Genetic algorithm
Finite-element program
Repeat until time-out
Solution candidates
Lamination’s geometry
Power losses (fitness)
for each candidate
Initial lamination’sgeometry
Optimizedlamination’s
geometry
Decode each candidate
Figure 5. New design procedure for the rotor and
stator.

8/3/2019 Geometrija UM
http://slidepdf.com/reader/full/geometrija-um 4/7
As a result, the overall B2 of the rotor is calculated asan average of the B2 values of all the rotor nodes.
When calculating the stator losses, the hysteresis loss
and the eddy-current loss must be added together. Inaddition, we must roughly estimate the factor n. Since theoverall stator losses are approximately five times smaller than the rotor losses, even a non-exact estimation of thefactor n does not have a significant influence on theoverall iron-loss calculation. Consequently, the iron lossof a motor can be expressed by the following formula (6):
stat stat h stat stat e
rot rot e Fe
m f Bk m f Bk
m f Bk P
⋅⋅⋅+⋅⋅⋅+
+⋅⋅⋅=
222
22
(6)
The sum of the iron and copper losses ( P CuFe)represents a so-called objective function for the GA.
Cu FeCuFe P P P += (7)
4.3. Calculation of other losses
Besides the iron and copper losses, there are threeadditional types of losses in a universal motor. These are:
P Brush ........ brush losses P Vent ..........ventilation losses P Frict ..........friction losses
All three types of losses mainly depend on the motor
speed. Since the motor speed is equal for all solutions,these losses are considered as constant in our analysis.
Taking into account all the above-mentioned losses,the overall efficiency of a universal motor is defined asfollows:
CuFe Frict Vent Brush P P P P P
P
++++=
2
2η (8)
P 2 .............output power
Consequently, the goal of the present investigation isto maximize this efficiency.
5. Genetic Algorithm (GA)
The GA was proposed by J.H. Holland in 1975 [3] as aheuristic search-and-optimization method. Since then ithas been applied with great success to variousoptimization and classification problems, in areas rangingfrom economics and game theory to control-systemdesign [4,5].
The GA manipulates strings representing the problem's potential solutions in a way that is analogous to the role
played by DNA in evolution. Each solution correspondsto a sample point in a search space. The initial set of sample points (i.e. the population of strings) is randomly
generated. New sample points are generated byrecombining the information from two 'parent' stringsdrawn from the current population. Another key elementof the GA is the use of selective pressure to allocatereproductive trails. Allowing strings that represent above-average solutions in the current population to 'reproduce'more often than strings that represent below-averagesolutions (i.e. the elitism strategy), the GA allocates moretrials to regions in a hyperspace that tend to containabove-average solutions.
The GA mechanism is as follows:
It has been proved that the GA outperforms traditionalsearch-and-optimization methods in several aspects: It requires little information to search effectively in a
large and complex search space. The GA is capable of performing a global search of a
space because to guide the search it relies onhyperplane sampling instead of searching along thegradient of a function.
Its intristic parallelism (in evaluation function,selections) allows working from a broad database of solutions in the search space simultaneously,climbing many peaks in parallel. Thus, the risk of converging to a local optimum is low.
The random decisions made in the GA can bemodeled using Markov chain analysis to show thateach finite GA will always converge to its global
Step 1. Encode parameters of the problem's
search space as finite-length strings over somefinite alphabet. The GA works with a codingof the parameter set, not the parametersthemselves!
Step 2. Initialize the population of strings.Step 3. Calculate the fitness for each member in
the population using an objective function.This information is used to perform aneffective search for better solutions. There isno need of other auxiliary knowledge!
Step 4. Select and reproduce individuals to form anew population according to each member'sfitness. The GA tends to take advantage of thefittest solutions by giving them greater weight,and concentrating the search in the regions othe search space with likely improvement.
Step 5. Perform genetic operators (i.e., probabilistic transition rules) such as crossover
and mutation on the population.Step 6. Go to step (3) until some condition is
satisfied.

8/3/2019 Geometrija UM
http://slidepdf.com/reader/full/geometrija-um 5/7
optimum region (but sometimes it has troublereaching the exact optimum location) [6].
It can be applied to a non-linear problem.
Therefore we decided to apply the GA to increase theefficiency of a universal motor with respect to thegeometry of its rotor and stator unit.
5.1. Genetic algorithm in the design procedure of
the rotor and stator
The most important job when putting the new design procedure for the rotor and the stator into practice was todefine the encoding method of the solution candidates, thegenetic operators and the termination criteria. We had toselect a method for evaluating the relative performance of the solution candidates for identifying the better solutions.
5.2. Encoding
The parameters of the problem's search space were codedas strings over the alphabet — of real (floating-point)values. Using a symbolic presentation of a string with 11characteristics (rotor-and-stator independent geometric parameters) gives:
S= s1 s2 s3 s4 s5 s6 s7 s8 s9 s10 s11
Here, each si represents a geometrical parameter of asingle stator or rotor, where each characteristic may takeon a real value from —. For example, in the particular string:
...0315.00340.00070.00078.0 ⊥⊥⊥⊥
s1 is 7.8E-003, s2 is7.E-003, etc.The rotor-and-stator independent geometric parameters
of an existing universal motor were used to form astarting string, which was reproduced (n-1) times togenerate an initial population of n strings. A random valuedistributed linearly on ∆± was added to eachcharacteristic value of the starting string to define areproduced string.
Each characteristic had its lower and upper limitdefined. If its value exceeded either limit, it was set to theclosest one.
Roughly speaking, the strings of this 'artificial geneticsystem' are analogous to the chromosomes in biologicalsystems. In natural terminology, chromosomes arecomposed of genes, which may take on some number of values called alleles. The entire set of strings upon whichthe GA operated was called a population.
5.3. Genetic operators
To allow the best solution candidate to evolve, the GA
employed the genetic operators of selection, crossover and mutation for manipulating the strings in a population.The GA used these operators to combine the strings of the population in different arrangements, seeking a string thatmaximizes the objective function. This combination of strings resulted in a new population.
The first genetic operator used by the GA for creatinga new generation was selection. To create two new strings(or children) two strings had to be selected from thecurrent population as parents. Most fit strings wereselected for reproduction. We had applied the elitism strategy, where a randomly selected number of least-fitmembers of the current population were interchangedwith an equal number of the best-ranked strings.
Crossover proceeded in two steps. First, strings weremated randomly, using a given probability, pc, to pair off the couples. Second, mated string couples crossed over,using a random probability to select the one-pointcrossing sites. An integer position, k , was selected between 1 and the string length minus one [1 ,l-1].Swapping all characteristic values between the positionsk+1 and l inclusively created two new strings. For example, considering strings A and B:
A= a1a2a3a4|a5a6 a7 a8a9a10a11
B= b1b2b3b4|b5b6 b7 b8b9b10b11
Suppose, choosing a random number between 1 and10, we obtained k =4. The resulting crossover yielded twonew strings A' and B' :
A'= a1a2a3a4| b5b6 b7 b8b9b10b11 B'= b1b2b3b4| a5a6 a7 a8a9a10a11
Moreover, we might use a constant probability, pr , toselect a case in which the values of the swappedcharacteristics were calculated as a mean (average) valueof the parent characteristic values.
While the first crossover approach ensured that thechild solutions preserved the 'genetic material' from both
parents, the second one helped to seek for other solutionsnear to solutions that appeared to be good.Mutation was a process by which the strings resulting
from selection and crossover were perturbed. It served tocreate random diversity in the population.
Each string was subjected to the mutation operator.Mutation was performed on a characteristic-by-characteristic basis, each characteristic mutating with a probability pm. Assuming that pm is a constant of 0.001,with eleven characteristic positions we expected11◊0.001=0.011 characteristics to undergo mutationduring a given population. However, since a high

8/3/2019 Geometrija UM
http://slidepdf.com/reader/full/geometrija-um 6/7
mutation rate resulted in a random walk through the GAsearch space, pm had to be chosen to be somewhatsmaller.
There was also a possibility of annealing the mutationrate, where pm was a variable mutation probability thatwas decreasing linearly with each new population. Inanother words, we assumed that each new population wasgenerally more fit than the previous one. Such anapproach was used to overcome a possible disruptiveeffect of mutation, and to speed up the convergence of theGA to the optimum solution.
5.4. Fitness evaluation
Following selection and reproduction, crossover, andmutation, the new population was ready to be evaluated.To do this, each new string (solution candidate) created by the GA was decoded into a set of the independentgeometrical parameters for the rotor and stator, and itsfitness was estimated by running the finite-element program (ANSYS). First, a finite-element numericalsimulation was performed. Then, the power losses of theiron and the copper (using the equations of (6) and (3),respectively) were calculated. Their sum (see (7))corresponded to the solution's fitness. The fitness of above-average strings corresponded to the lowest power (iron and copper) losses.
5.5. Termination criteria
The GA operated repetitively, with the idea that, onaverage, the solutions of the population defining thecurrent generation had to be as good (or better) atmaximizing the fitness function as those of the previousgeneration. When a certain number of populations had been generated and evaluated, the system was assumed to be in a non-converging state. This criterion was a 'time-out' approach. The fittest member of the currentgeneration at the time the GA terminated was taken to bethe solution of the design problem.
5.6. Parameter settings
Finding good settings for the parameters of the GA thatworked for the problem was not a trivial task. Robust parameter settings had to be found for population size,number of generations, selection criteria and geneticoperator probabilities: If the population was too small, the GA converged
too quickly to a local optimum solution and might notfind the best solution. On the other hand, large populations required a long time to converge to aregion of the search space with significantimprovement.
By applying the elitism strategy, fitter solutions had agreater chance of reproducing. But when the number of least-fit solutions to be exchanged with best-fit
ones (the selection criteria) was too high, the GA wastrapped too quickly in a local optimum solution.However, this number was subject to the populationsize.
Too high a mutation rate introduced too muchdiversity and took a longer time to reach the optimumsolution. Too low a mutation rate tended to misssome near-optimum solutions. Using the annealingstrategy (a linearly decreasing mutation probabilityrate with each new generation) the effects of a toohigh or too low mutation rate could be overcome.
6. Evaluation
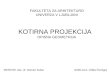
First, the efficiency of an existing universal motor wascalculated. An outline of the rotor/stator lamination of thismotor is shown in Fig.6. The power losses of this motor were 313W and the output power was 731W. In theoutline, the levels of magnetic flux density through therotor/stator lamination are shown, expressed as T. Thedarkest grey color indicates areas with the highest level of magnetic flux density, which results in a high iron loss.
Figure 6. Existing rotor/stator lamination.
After several runs of the GA, a set of promisingsolution candidates was collected. For each candidate afinite-element numerical simulation followed by thecalculation of the objective function value (fitness) was performed. Most of the solutions show a significantreduction of power losses in comparison with the losses inthe existing motor. The best solution results in a power-loss reduction of 16%, and gives us a motor with copper and iron losses of 264W (see Fig.7).
A comparison of the magnetic flux densities in theexisting and the optimized motors shows a clear reduction

8/3/2019 Geometrija UM
http://slidepdf.com/reader/full/geometrija-um 7/7
Figure 7. Optimized lamination.
of areas with the highest levels of magnetic flux density inthe optimized motor.
The iron and copper losses of the initial and theoptimized lamination design are shown in Tab.1. In thenew (optimized) lamination, the copper losses in the rotor and the stator are significantly lower than in the initiallamination. On the other hand, the iron losses are higher than in the initial lamination. The reason for this effect isthat the slot area in the stator of the optimized laminationis larger. The number of ampere-turns in the optimizedlamination that are necessary for obtaining the required
torque are lower in comparison with the initial laminationdue to the optimized lamination design. If J in (2) issubstituted with (1), the equation is as follows:
( )turnCuSlot
l A
N I P ⋅⋅
⋅= ρ
2
(9)
From the equation above it is clear that the copper losses increase with the square of the number of ampere-turns and are inversely proportional to the slot area. In therotor, the slot area is slightly decreased, but the effect of reducing I ⋅ N is much stronger, and this results in lower copper losses in the rotor. The iron losses are increased in
both the rotor and the stator, mainly because of theslightly larger iron area in the optimized design. Themagnetic flux density in the stator remains in the samerange as in the initial design. In rotor, the magnetic fluxdensity is decreased, but the iron area of the rotor islarger. Overall, the optimized design has a much better torque capability, and this results in a total loss reductionof 16%.
We next made a prototype of the motor and measuredthe real losses and efficiency of the motor. These valuesare shown in Tab.1 and are slightly different from thecalculated ones. The main reason for the difference is the
Table 1. Evaluation results.
non-exact iron losses.
7. Conclusion
In this paper, an evolutionary optimization technique for designing a universal motor for home appliances, withconstraints on the geometry of the rotor/stator lamination,is presented. An approach that uses the GA at a very earlystage of the motor design when an optimum configurationof the geometrical parameters has to be found, isdescribed. The GA generates sets of solution candidates,which are evaluated using the finite-element method. Wedemonstrated that by repeating the process by which theGA generates sets of solutions an optimum configurationwith reduced power losses can be found in a very shorttime.
Using the GA the iron and copper losses of an existinguniversal motor were reduced by at least 10%. Increasingthe GA running time or setting its parameters moreappropriately could improve this result, still further,
however, the additional effects of other motor components should also be investigated.
References
[1] D.E.Goldberg, Genetic Algorithms in Search, Optimization,and Machine Learning . Addison-Wesley Publishing Company,Inc., 1989.[2] ANSYS User's Manual, ANSYS version 5.6, 2000.[3] J.H. Holland, Adaptation in natural and artificial systems.Ann Arbor: The University of Michigan Press, 1975.[4] G.Papa, Using Simulated Annealing and Genetic Algorithmin the Automated Synthesis of Digital Systems, Nikos E.Mastorakis (editor), Recent advances in Circuits and Systems,
World Scientific, Singapore, 1998, pp. 377-381.[5] B.Koroušić-Seljak, Heuristic Methods for a CombinatorialOptimization Problem - Real-Time Task Scheduling Problem, InC.H.Dagli et al (editors): Smart Engineering System Design:
Neural Networks, Fuzzy Logic, Evolutionary Programming,
Data Mining, and Complex Systems, ASME Press Series onIntelligent Engineering Systems through Artificial Neural
Networks, Volume 9, 1999, pp. 1041-1046. [6] C.L. Karr et al, Solving inverse initial-value, boundary-value
problems via genetic algorithm, Engineering Applications of
Artificial Intelligence, Volume 13, Number 6, December 2000, pp. 625-633.
analyticcalculation
prototypemeasurement
initial new initial newinput power (W) 1044 1037 1100 1100efficiency (%) 70.0 74.5 69.7 72.6output power (W) 731 773 767 799iron&copper losses (W) 313 264 333 301