Embed Size (px)
Citation preview
Chương 3
Hàm vectơ
3.1. Một số hệ tọa độ trong R2 và R3 ..................................................................................83 3.1.1. Hệ tọa độ cực .................................................................................................................. 84 3.1.2. Tọa độ trụ và tọa độ cầu.................................................................................................. 86
3.2. Hàm vectơ một biến .....................................................................................................88 3.2.1. Khái niệm........................................................................................................................ 88 3.2.2. Giới hạn và tính liên tục.................................................................................................. 89 3.2.3. Đạo hàm .......................................................................................................................... 91 3.2.4. Ý nghĩa hình học và cơ học của đạo hàm .................................................................... 92 3.2.5. Hàm khả vi và công thức Taylor ..................................................................................... 93 3.2.6. Tích phân......................................................................................................................... 94
3.3. Hàm vectơ nhiều biến....................................................................................................96 3.3.1. Khái niệm........................................................................................................................ 96 3.3.2. Ma trận Jacobi ................................................................................................................. 98 3.3.3. Ánh xạ khả vi .................................................................................................................. 99 3.3.4. Định lý ánh xạ ngược .................................................................................................... 103 3.3.5. Hàm ẩn .......................................................................................................................... 106 3.3.6. Hessian .......................................................................................................................... 108 3.3.7. Cực đại và cực tiểu........................................................................................................ 110 3.3.8. Ánh xạ đơn điệu và hàm lồi .......................................................................................... 112
3.4. Hàm phức sơ cấp.......................................................................................................... 115 3.4.1. Điểm lại số phức ........................................................................................................... 115 3.4.2. Dãy và chuỗi phức ........................................................................................................ 118 3.4.3. Hàm phức ...................................................................................................................... 119 3.4.4. Hàm chỉnh hình ............................................................................................................. 120 3.4.5. Một số hàm sơ cấp ........................................................................................................ 122
84 Giải tích các hàm nhiều biến
3.1. Một số hệ tọa độ trong R2 và R3
3.1.1. Hệ tọa độ cực
Trong không gian R2 chúng ta đã biết tới hệ tọa độ trực chuẩn Descartes mà
trong đó mỗi điểm được biểu diễn bởi cặp số (a,b) với a là tọa độ trên trục x còn b là tọa độ trên trục y. Ngoài hệ tọa độ trực chuẩn nói trên thường người ta còn dùng hệ tọa độ cực để biểu diễn các điểm trong R2. Hệ
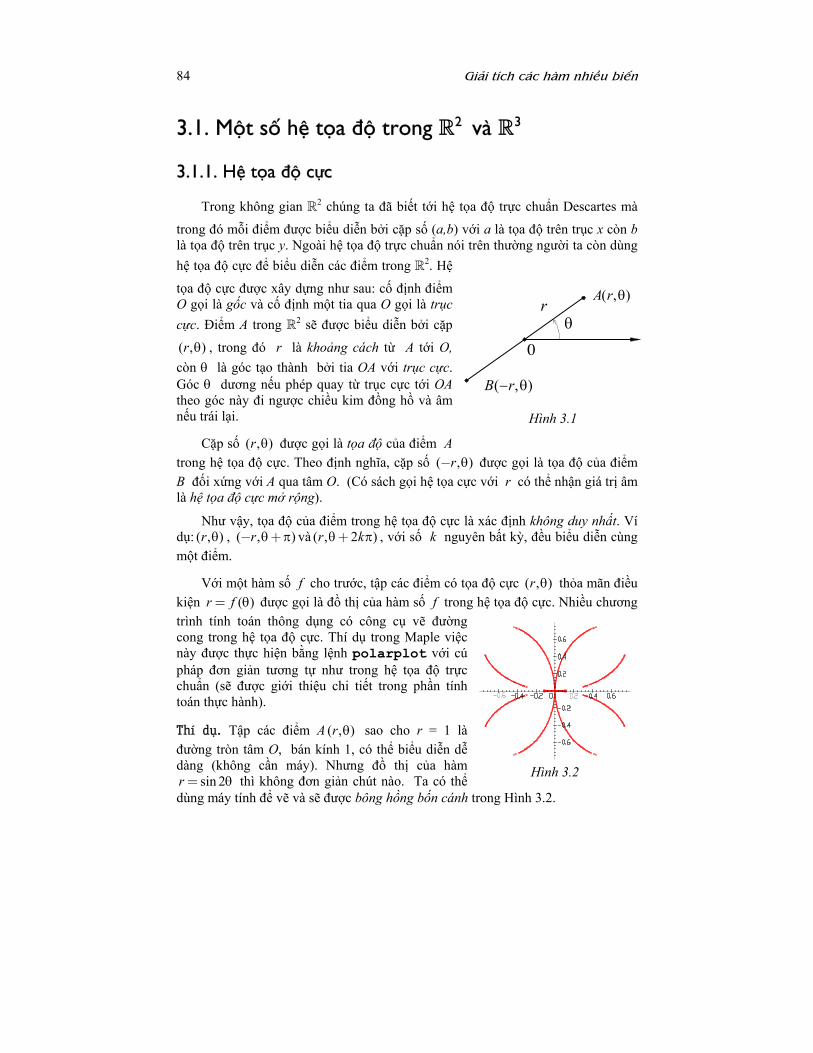
tọa độ cực được xây dựng như sau: cố định điểm O gọi là gốc và cố định một tia qua O gọi là trục cực. Điểm A trong R2 sẽ được biểu diễn bởi cặp
( , )r θ , trong đó r là khoảng cách từ A tới O, còn θ là góc tạo thành bởi tia OA với trục cực. Góc θ dương nếu phép quay từ trục cực tới OA theo góc này đi ngược chiều kim đồng hồ và âm nếu trái lại.
Cặp số ( , )r θ được gọi là tọa độ của điểm A trong hệ tọa độ cực. Theo định nghĩa, cặp số ( , )r θ− được gọi là tọa độ của điểm B đối xứng với A qua tâm O. (Có sách gọi hệ tọa cực với r có thể nhận giá trị âm là hệ tọa độ cực mở rộng).
Như vậy, tọa độ của điểm trong hệ tọa độ cực là xác định không duy nhất. Ví dụ: ( , )r θ , ( , )r θ π− + và ( , 2 )r kθ π+ , với số k nguyên bất kỳ, đều biểu diễn cùng một điểm.
Với một hàm số f cho trước, tập các điểm có tọa độ cực ( , )r θ thỏa mãn điều kiện ( )r f θ= được gọi là đồ thị của hàm số f trong hệ tọa độ cực. Nhiều chương trình tính toán thông dụng có công cụ vẽ đường cong trong hệ tọa độ cực. Thí dụ trong Maple việc này được thực hiện bằng lệnh polarplot với cú pháp đơn giản tương tự như trong hệ tọa độ trực chuẩn (sẽ được giới thiệu chi tiết trong phần tính toán thực hành).
Thí dụ. Tập các điểm A ( , )r θ sao cho r = 1 là đường tròn tâm O, bán kính 1, có thể biểu diễn dễ dàng (không cần máy). Nhưng đồ thị của hàm
sin 2r θ= thì không đơn giản chút nào. Ta có thể dùng máy tính để vẽ và sẽ được bông hồng bốn cánh trong Hình 3.2.
r),( θrA
θ
),( θ−rB
0
Hình 3.1
Hình 3.2
Chương 3. Hàm vectơ 85
Với một hàm hai biến F cho trước, tập các điểm có tọa độ cực ( , )r θ thỏa mãn điều kiện ( , ) 0F r θ = được xem là một đường cong trong hệ tọa độ cực, và
( , ) 0F r θ = là phương trình của đường cong này.
Liên hệ với hệ tọa độ trực chuẩn
Giả thiết trong R2 có hai hệ tọa độ: hệ tọa độ trực chuẩn xy và hệ tọa độ cực
rθ với điểm gốc O và trục cực trùng với Ox. Mỗi điểm A ∈ R2 sẽ có tọa độ là
( , )x y trong hệ tọa độ trực chuẩn và tọa độ là ( , )r θ trong hệ tọa độ cực.
Ta có cossin
x ry r
θθ
= = . (1)
Nếu r = 0 thì x = 0 và y = 0. Như vậy, (1) chính là công thức biến đổi từ tọa độ cực sang tọa độ trực chuẩn.
Từ công thức (1) có thể tìm được cách biến đổi ngược từ hệ tọa độ trực chuẩn sang hệ tọa độ cực. Trước hết ta thấy ngay rằng 2 2 2r x y= + . Tiếp theo ta có
tan yxθ= , khi 0x ≠ . Với 0x= thì sgn( ) 2
2y kπθ π= + nếu chọn | |r y= , và
sgn( ) 22 y kπθ π= − + nếu chọn | |r y=− , trong đó k là số nguyên.
Thí dụ
1) Phương trình đường thẳng 1x y+ = trong hệ tọa độ cực được suy ra dễ dàng nhờ công thức (1). Thật vậy, bằng phép thế trực tiếp ta có (cos sin ) 1r θ θ+ = .
2) Phương trình của đường cong sin cosr θ θ= + trong hệ tọa độ cực cũng có thể dễ dàng chuyển sang hệ tọa độ trực chuẩn nhờ công thức (1). Thật vậy, ta có
sin xr
θ= , cos yrθ= . Thế vào phương trình đường cong ta có yxr r r= + , và để ý
2 2 2r x y= + ta suy ra phương trình cần tìm là 2 2 ( ) 0x y x y+ − + = . Trong hệ
y
Br
xr < 0
θ
A(x,y)
Hình 3.4
y
A
r
xr > 0
θ
Hình 3.3
86 Giải tích các hàm nhiều biến
tọa độ trực chuẩn, đây là phương trình của đường tròn tâm tại điểm ( )1 1,2 2 , bán
kính 22
.
3.1.2. Tọa độ trụ và tọa độ cầu
Trong không gian R3 ngoài hệ tọa độ trực chuẩn quen biết còn có hai loại tọa
độ thông dụng nữa: hệ tọa độ trụ và hệ tọa độ cầu.
1. Hệ tọa độ trụ
Giả sử trong R3 ta có hệ tọa độ trực chuẩn xyz với gốc tọa độ O. Khi ấy một
điểm A bất kỳ được biểu diễn bởi bộ ba ( , , )r zθ , trong đó z là cao độ Descartes của A theo trục Oz còn ( , )r θ là tọa độ cực của hình chiếu của A lên mặt phẳng tọa độ xy. Bộ ba ( , , )r zθ được gọi là tọa độ của điểm A trong hệ tọa độ trụ.
Ta sẽ luôn giả thiết rằng trục cực của hệ tọa độ cực trong mặt phẳng xy trùng với Ox. Khi ấy, các công thức biến đổi từ tọa độ trụ sang tọa độ trực chuẩn sẽ là
.cos.sin
x ry rz z
θθ
= = =
.
Từ đây ta có 2 2 2r x y= + , và công thức biến đổi ngược được dễ dàng suy ra từ công thức này tương tự như đối với hệ tọa độ cực.
Thí dụ
1) Tìm phương trình của mặt phẳng 2 2x y z+ + = trong hệ tọa độ trụ.
Giải. Áp dụng công thức biến đổi trên ta có ngay (sin cos ) 2 2r zθ θ+ + = .
2) Tìm phương trình của đồ thị của 4sinr θ= trong hệ tọa độ trực chuẩn.
Giải. Từ công thức biến đổi suy ra sin yrθ= . Thế vào phương trình ta có
4 yr r= , hay 214y r= .
Do 2 2 2r x y= + nên 2 21 ( ) 04 x y y+ − = , hay 2 2 4 0x y y+ − = . Đây là phương
trình mặt trụ có trục song song trục Oz. Đường chuẩn là đường tròn tâm (0,2,0) bán kính 2.
Chương 3. Hàm vectơ 87
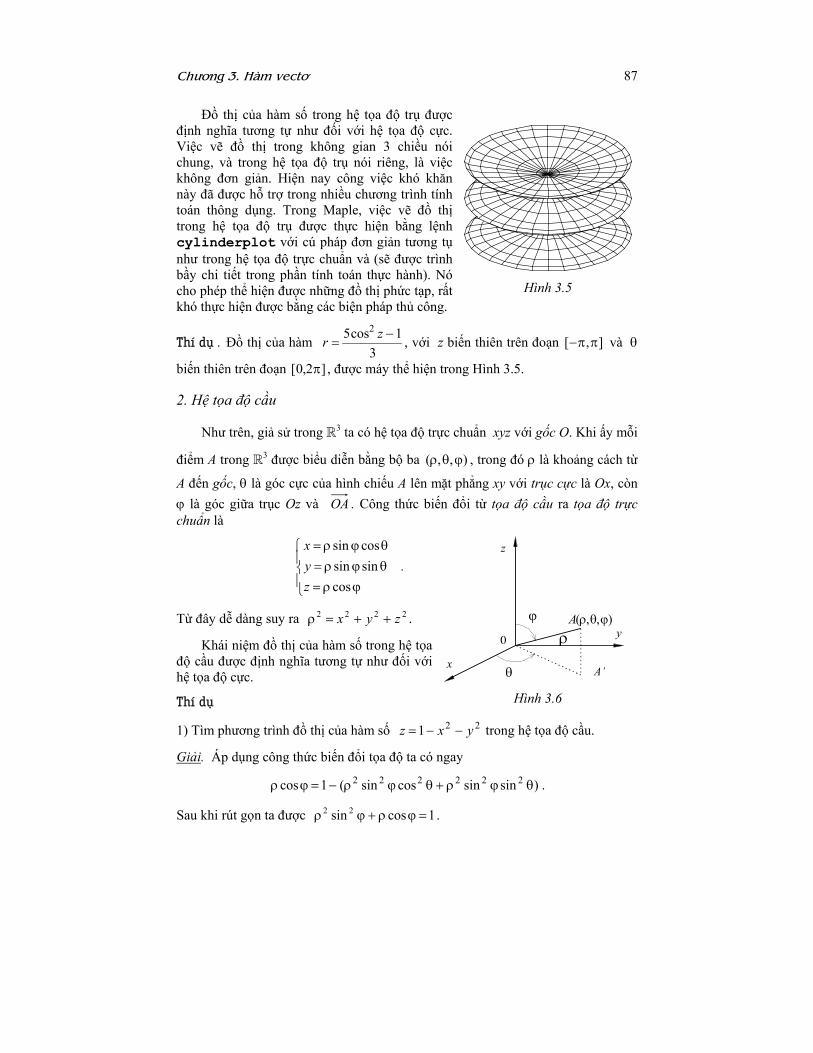
Đồ thị của hàm số trong hệ tọa độ trụ được định nghĩa tương tự như đối với hệ tọa độ cực. Việc vẽ đồ thị trong không gian 3 chiều nói chung, và trong hệ tọa độ trụ nói riêng, là việc không đơn giản. Hiện nay công việc khó khăn này đã được hỗ trợ trong nhiều chương trình tính toán thông dụng. Trong Maple, việc vẽ đồ thị trong hệ tọa độ trụ được thực hiện bằng lệnh cylinderplot với cú pháp đơn giản tương tụ như trong hệ tọa độ trực chuẩn và (sẽ được trình bầy chi tiết trong phần tính toán thực hành). Nó cho phép thể hiện được những đồ thị phức tạp, rất khó thực hiện được bằng các biện pháp thủ công.
Thí dụ . Đồ thị của hàm r z=
−5 13
2cos , với z biến thiên trên đoạn [ , ]−π π và θ
biến thiên trên đoạn [ , ]0 2π , được máy thể hiện trong Hình 3.5.
2. Hệ tọa độ cầu
Như trên, giả sử trong R3 ta có hệ tọa độ trực chuẩn xyz với gốc O. Khi ấy mỗi
điểm A trong R3 được biểu diễn bằng bộ ba ),,( ϕθρ , trong đó ρ là khoảng cách từ
A đến gốc, θ là góc cực của hình chiếu A lên mặt phẳng xy với trục cực là Ox, còn ϕ là góc giữa trục Oz và OA . Công thức biến đổi từ tọa độ cầu ra tọa độ trực chuẩn là
ϕρ=θϕρ=θϕρ=
cossinsincossin
zyx
.
Từ đây dễ dàng suy ra 2222 zyx ++=ρ .
Khái niệm đồ thị của hàm số trong hệ tọa độ cầu được định nghĩa tương tự như đối với hệ tọa độ cực.
Thí dụ
1) Tìm phương trình đồ thị của hàm số 221 yxz −−= trong hệ tọa độ cầu.
Giải. Áp dụng công thức biến đổi tọa độ ta có ngay
)sinsincossin(1cos 222222 θϕρ+θϕρ−=ϕρ .
Sau khi rút gọn ta được 1cossin 22 =ϕρ+ϕρ .
Hình 3.5
z
x
y
A’
),,( ϕθρAϕ
0 ρ
θ Hình 3.6
88 Giải tích các hàm nhiều biến
2) Tìm phương trình biểu diễn đồ thị của ϕ=ρ cos4 trong hệ tọa độ trực chuẩn.
Giải. Từ phương trình ta suy ra z4cos42 =ϕρ=ρ , hay 04222 =−++ zzyx .
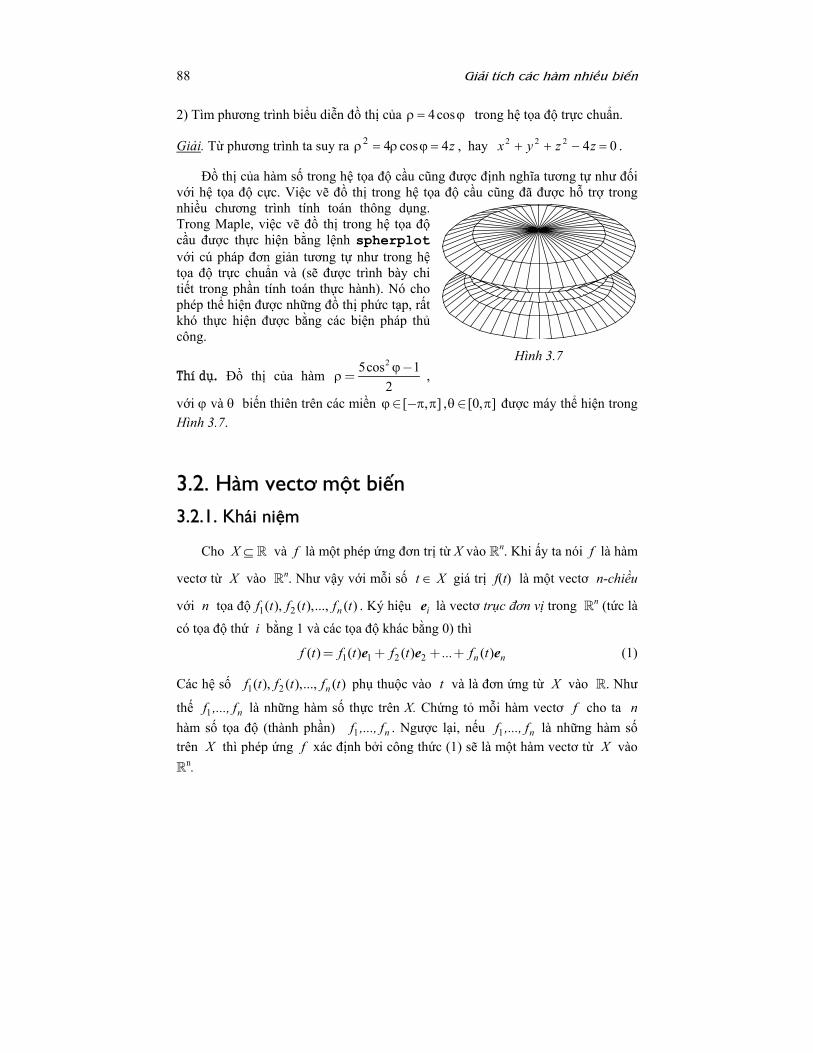
Đồ thị của hàm số trong hệ tọa độ cầu cũng được định nghĩa tương tự như đối với hệ tọa độ cực. Việc vẽ đồ thị trong hệ tọa độ cầu cũng đã được hỗ trợ trong nhiều chương trình tính toán thông dụng. Trong Maple, việc vẽ đồ thị trong hệ tọa độ cầu được thực hiện bằng lệnh spherplot với cú pháp đơn giản tương tự như trong hệ tọa độ trực chuẩn và (sẽ được trình bày chi tiết trong phần tính toán thực hành). Nó cho phép thể hiện được những đồ thị phức tạp, rất khó thực hiện được bằng các biện pháp thủ công.
Thí dụ. Đồ thị của hàm 25cos 12ϕ
ρ−= ,
với ϕ và θ biến thiên trên các miền [ , ] , [0, ]ϕ π π θ π∈ − ∈ được máy thể hiện trong Hình 3.7.
3.2. Hàm vectơ một biến 3.2.1. Khái niệm
Cho X ⊆ R và f là một phép ứng đơn trị từ X vào Rn. Khi ấy ta nói f là hàm
vectơ từ X vào Rn. Như vậy với mỗi số t ∈ X giá trị f(t) là một vectơ n-chiều
với n tọa độ 1 2( ), ( ),..., ( )nf t f t f t . Ký hiệu ie là vectơ trục đơn vị trong Rn (tức là
có tọa độ thứ i bằng 1 và các tọa độ khác bằng 0) thì
1 1 2 2( ) ( ) ( ) ( )n nf t f t f t ... f t= + + +e e e (1)
Các hệ số 1 2( ), ( ),..., ( )nf t f t f t phụ thuộc vào t và là đơn ứng từ X vào R. Như
thế 1 nf ,..., f là những hàm số thực trên X. Chứng tỏ mỗi hàm vectơ f cho ta n hàm số tọa độ (thành phần) 1 nf ,..., f . Ngược lại, nếu 1 nf ,..., f là những hàm số trên X thì phép ứng f xác định bởi công thức (1) sẽ là một hàm vectơ từ X vào Rn.
Hình 3.7
Chương 3. Hàm vectơ 89
Khi hệ vectơ tọa độ 1 n,...,e e ∈Rn đã được xác
định, ta viết 1 2( ) ( ( ), ( ),..., ( ))nf t f t f t f t= có nghĩa là hàm vectơ f của biến t được cho bởi công thức (1), trong đó 1 nf ,..., f là những hàm số trên X ⊆ R .
Thí dụ
1) Trong không gian R3, ký hiệu i = e1, j = e2, k =
e3 trong hệ tọa độ trực chuẩn. Hàm vectơ một biến ( ) ( cos , sin , )f t a t a t bt= với a và b là những hằng
số cho ta phép ứng
( cos ) ( sin ) ( )t a t a t bt+ +i j k ,
với mỗi t∈R. Điểm cuối của vectơ f(t) tạo thành đường hình lò xo (như Hình 3.8).
2) Trong thí dụ trên nếu bỏ tọa độ thứ 3 thì ta sẽ có hàm vectơ biến t với giá trị trong mặt phẳng (không gian R2):
( ) ( cos , sin ) ( cos ) ( sin )f t a t a t a t a t= = +i j .
Điểm cuối của vectơ f(t) tạo thành đường tròn tâm O, bán kính |a|.
3.2.2. Giới hạn và tính liên tục
Cho f(t) là một hàm vectơ biến t ∈ R với giá trị trong Rn (n ≥ 2). Ta nói rằng
vectơ 1( )nv v ,...,v= ∈ Rn là giới hạn của ( )f t khi 0t t→ và viết
0lim ( )t t
f t v→
= (2)
nếu như, với mọi ε > 0, tồn tại δ > 0 để ( )f t v ε− < mỗi khi 00 t t δ< − < .
Mệnh đề. Cho 1 2( ) ( ( ), ( ),..., ( ))nf t f t f t f t= là hàm vectơ biến t ∈ R.. Khi ấy
01lim ( ) ( ,..., )nt t
f t v v→
= khi và chỉ khi 0
lim ( )i it tf t v
→= , với mọi i = 1,...,n.
Chứng minh. Theo định nghĩa, 0
lim ( )t t
f t v→
= thì với mọi ε > 0 đều tồn tại δ > 0
để ( ) ( )2 21 1( ) ... ( )n nf t v f t v ε− + + − < với mọi t thoả mãn 00 t t δ< − < .
Chứng tỏ ( )i if t v ε− < xảy ra mỗi khi 00 t t δ< − < . Vậy 0
lim ( )i it tf t v
→= , với
mọi i = 1,...,n.
(a,0,0)
Hình 3.8

90 Giải tích các hàm nhiều biến
Trái lại, nếu (2) đúng thì với 0ε> cho trước, lấy i nεε = , ta sẽ tìm được
iδ để ( )i i if t v ε− < mỗi khi 00 it t δ< − < . Chọn 1min{ ,..., }nδ δ δ= , ta có
( ) ( )2 22 2
1 1( ) ( ) ... ( ) ...n nf t v f t v f t v n nε ε ε− = − + + − < + + =
mỗi khi 00 t t δ< − < . Chứng tỏ0
lim ( )t t
f t v→
= . Mệnh đề được chứng minh xong.
Nhận xét. Từ mệnh đề trên việc khảo sát giới hạn của hàm vectơ một biến hoàn toàn có thể đưa về việc xét giới hạn của hàm số mà chúng ta đã học trong giáo trình Giải tích một biến. Nhiều tính chất về giới hạn của hàm vectơ có thể chứng minh tương tự như trường hợp hàm số. Thí dụ như:
a) 0
lim ( )t t
f t v→
= khi và chỉ khi 0
lim( ( ) )t t
f t v→
− = 0 (ở đây 0 là vectơ có các tọa
độ bằng 0).
b) 0
lim ( )t t
f t v→
= khi và chỉ khi ( ) ( )f t v tα= + , trong đó ( )tα là vectơ vô cùng
bé khi 0t t→ theo nghĩa 0
lim ( )t t
tα→
= 0 .
c) Nếu ( )f t và ( )g t là hai hàm vectơ và 0
lim ( )t t
f t v→
= , 0
lim ( )t t
g t u→
= thì
0lim( ( ) ( ))t t
f t g t v u→
+ = + .
d) Nếu c là hằng số và 0
lim ( )t t
f t v→
= thì 0
lim ( )t t
cf t cv→
= .
e) Nếu ( )c t là một hàm số và 0
lim ( )t t
c t c→
= , 0
lim ( )t t
f t v→
= thì 0
lim ( ) ( )t t
c t f t cv→
= .
f) Nếu ( )f t và ( )g t là hai hàm vectơ và 0
lim ( )t t
f t v→
= , 0
lim ( )t t
g t u→
= thì
0lim ( ), ( ) ,t t
f t g t v u→< >=< > (tích vô hướng).
0lim ( ) ( )t t
f t g t v u→
× = × (tích vectơ trong trường hợp 3 chiều).
Nhắc lại rằng người ta định nghĩa tích vectơ của 2 vectơ 1 2 3( , , )x x x x= và
1 2 3( , , )y y y y= là vectơ 2 3 3 2 1 3 3 1 1 2 2 1( , , )x y x y x y x y x y x y− − − .
Định nghĩa. Hàm vectơ gọi là liên tục tại 0t nếu 0
0lim ( ) ( )t t
f t f t→
= , tức là với
mọi 0ε> sẽ tồn tại 0δ> sao cho
0( ) ( )f t f t ε− < mỗi khi 00 t t δ< − < .
Hệ quả. Hàm vectơ 1 2( ) ( ( ), ( ),..., ( ))nf t f t f t f t= liên tục tại 0t khi và chỉ khi các hàm tọa độ 1 2( ), ( ),..., ( )nf t f t f t liên tục tại 0t .

Chương 3. Hàm vectơ 91
Chứng minh. Suy ra ngay từ mệnh đề trên.
Từ kết quả này ta thấy rằng những tính chất về tính liên tục của hàm vectơ hoàn toàn tương tự như trường hợp hàm số.
3.2.3. Đạo hàm
Định nghĩa. Cho f(t) là hàm vectơ. Khi ấy nếu 0
( ) ( )limt
f t t f tt∆
∆∆→
+ − tồn tại
thì giới hạn đó được gọi là đạo hàm của f tại t và được ký hiệu là f’(t) hay ( )df t
dt hay ( )f t .
Mệnh đề sau cho phép tính đạo hàm của f qua các hàm số thành phần.
Mệnh đề. Hàm vectơ 1 2( ) ( ( ), ( ),..., ( ))nf t f t f t f t= có đạo hàm tại t0 khi và chỉ khi 1 2( ), ( ),..., ( )nf t f t f t khả vi tại t0 và khi ấy ta có công thức
0 1 0 2 0 0'( ) ( ( ), ( ),..., ( ))nf t f t f t f t′ ′ ′= .
Chứng minh. Áp dụng công thức tính giới hạn hàm vectơ ta có
0 00
( ) ( )limt
f t t f tt∆
∆∆→
+ − = v , với 1( )nv v ,...,v= ,
khi và chỉ khi
0 00
( ) ( )lim i iit
f t t f t vt∆
∆∆→
+ − = , với mọi i = 1,...,n
và suy ra ngay kết quả.
Sau đây là một số công thức tính đạo hàm.
Mệnh đề. Cho f(t) và g(t) là hai hàm vectơ có đạo hàm và c là một hằng số. Khi ấy
(i) (f(t)+g(t))’ = f’(t)+g’(t) ;
(ii) (cf’(t)) = cf’(t) ;
(iii) ( ( ), ( ) ) ( ), ( ) ( ), ( )f t g t f t g t f t g t′ ′ ′< > =< >+< > ;
(iv) (f(t)×g(t))’ = f(t)×g’(t) + f’(t)×g(t) (trong trường hợp 3 chiều).
Chứng minh. Ta sẽ chứng minh công thức (iii) còn các công thức khác chứng minh tương tự. Vì 1 2( ) ( ( ), ( ),..., ( ))nf t f t f t f t= và 1 2( ) ( ( ), ( ),..., ( ))ng t g t g t g t= , cho nên
1 1( ), ( ) ( ) ( ) ... ( ) ( )n nf t g t f t g t f t g t< >= + + .
Dùng công thức tính đạo hàm của tổng và tích của các hàm số ta thu được
92 Giải tích các hàm nhiều biến
( ) ( ) ( )1 1( ) ( ) ( ) ( ) ( ) ( )n nf t ,g t f t g t ... f t g t =′ ′ ′< > = + +
1 1 1 1( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )n n n nf t g t + f t g t ... f t g t + f t g t′ ′ ′ ′= + + =
1 1 1 1( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )n n n n= f t g t .... f t g t f t g t ... f t g t =′ ′ ′ ′+ + + + +
( ) ( ) ( ) ( )f t ,g t f t ,g t′ ′=< >+< > .
Mệnh đề được chứng minh xong.
Thí dụ
1) Cho hàm vectơ f(t) sao cho độ dài vectơ ||f(t)|| là hằng số. Chứng minh rằng f’(t) vuông góc với f(t) tại mọi t.
Giải. Ta có 2( ), ( ) || ( ) || constantf t f t f t< >= = . Áp dụng công thức tính đạo hàm
0 ( ( ), ( ) ) ( ), ( ) ( ), ( )f t f t f t f t f t f t′ ′ ′= < > =< >+< > .
Suy ra ( ), ( )f t f t′< > = 0, chứng tỏ f’(t) vuông góc với f(t).
2) Cho hàm vectơ ( )f t có hướng hằng, tức là tồn tại hướng cố định v và hàm ( )tα sao cho ( ) ( )f t tα ν= . Khi ấy '( ) '( )f t tα ν= cũng là hàm vectơ có hướng
hằng trùng với hướng của ( )f t .
Chú ý. Nếu hàm vectơ ( )f t có đạo hàm thì đạo hàm '( )f t cũng là hàm vectơ. Nếu hàm vectơ '( )f t có đạo hàm thì đạo hàm của nó được ký hiệu là ''( )f t và được gọi là đạo hàm cấp 2 của hàm ( )f t . Tương tự ta có thể định nghĩa đạo hàm cấp m của ( )f t và ký hiệu là ( ) ( )mf t .
3.2.4. Ý nghĩa hình học và cơ học của đạo hàm
1. Ý nghĩa hình học
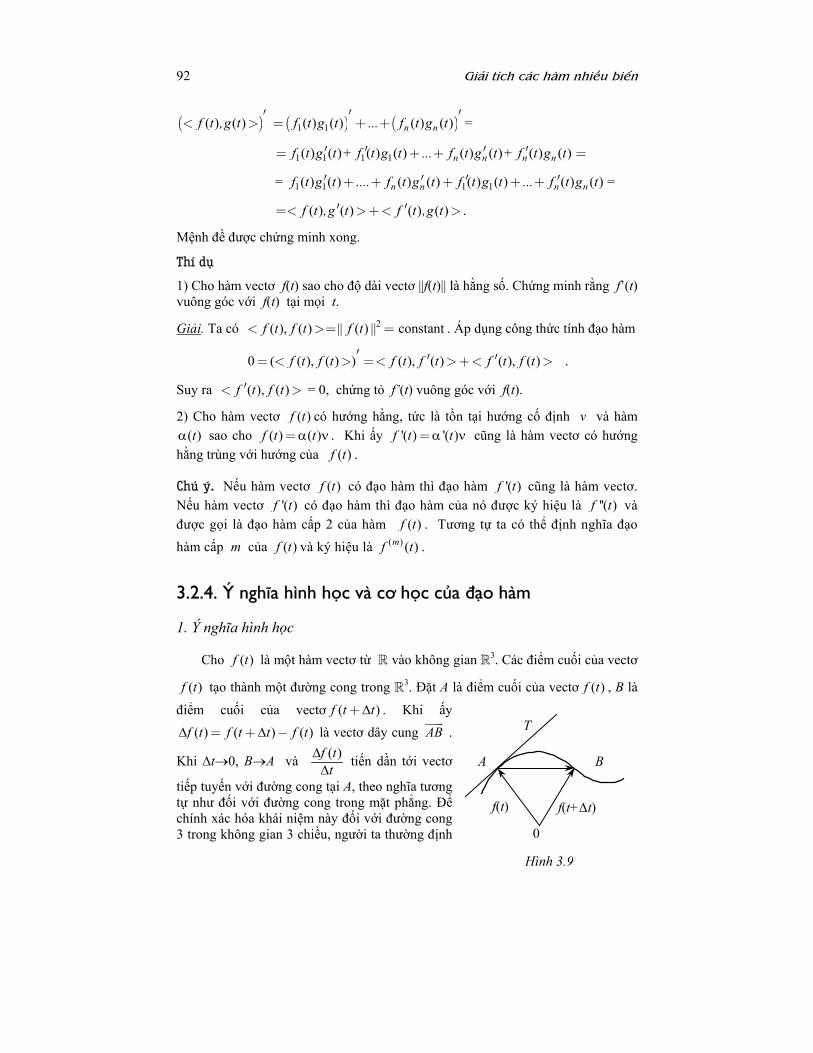
Cho ( )f t là một hàm vectơ từ R vào không gian R3. Các điểm cuối của vectơ
( )f t tạo thành một đường cong trong R3. Đặt A là điểm cuối của vectơ ( )f t , B là
điểm cuối của vectơ ( )f t t∆+ . Khi ấy ( ) ( ) ( )f t f t t f t∆ ∆= + − là vectơ dây cung AB .
Khi ∆t→0, B→A và ( )f tt
∆∆
tiến dần tới vectơ
tiếp tuyến với đường cong tại A, theo nghĩa tương tự như đối với đường cong trong mặt phẳng. Để chính xác hóa khái niệm này đối với đường cong 3 trong không gian 3 chiều, người ta thường định
f(t) f(t+∆t)
A B
T
0
Hình 3.9
Chương 3. Hàm vectơ 93
nghĩa vectơ tiếp tuyến với đường cong tại A là vectơ cùng phương với '( )f t .
Thí dụ. Cho ( ) (cos ,sin ,0)f t t t= là hàm vectơ từ R vào R3. Tập ảnh là đường
tròn đơn vị trên mặt phẳng xy. Ta có '( ) ( sin ,cos ,0)f t t t= − . Đây là hướng tiếp
tuyến với đường tròn tại mọi điểm (cos ,sin ,0)t t , t∈R.
2. Ý nghĩa cơ học
Giả sử điểm vật chất chuyển động trong không gian phụ thuộc vào thời gian t theo công thức 1 2 3( ) ( ( ), ( ), ( ))f t f t f t f t= . Tại thời điểm t, vị trí điểm vật chất sẽ là
điểm cuối của vectơ ( )f t . Khi ấy ( )f tt
∆∆
biểu thị tốc độ của chuyển động trung
bình trong thời gian từ t đến t t∆+ (điểm vật chất di chuyển từ A tới B). Như vậy '( )f t sẽ là vectơ vận tốc chuyển động tại thời điểm t. Tương tự ''( )f t là vectơ gia
tốc của chuyển động tại thời điểm t.
3.2.5. Hàm khả vi và công thức Taylor
Hàm vectơ ( )f t được gọi là khả vi tại t nếu số gia của hàm tại điểm này có thể biểu diễn dạng
( )f t t∆ ν∆ α= + (1)
trong đó v là vectơ hằng, α là một hàm vectơ nhỏ vô cùng khi 0t∆ → .
Trong trường hợp này đại lượng vectơ v∆t được gọi là vi phân của f tại t và ký hiệu ( )df t . Nhận xét rằng nếu ( )f t khả vi tại t thì có đạo hàm tại điểm đó và
'( )f tν= . Như vậy ( ) '( )df t f t t∆= . Để tiện người ta viết dt thay cho ∆t: ( ) '( )df t f t dt= . Công thức tính vi phân của hàm vectơ theo các thành phần là
1( ) ( ( ),..., ( ))ndf t df t df t= .
Giả thiết '( )f t khả vi tại t. Khi ấy, tương tự như đối với hàm số, người ta định nghĩa vi phân cấp 2 của ( )f t tại t là 2 2( ) ( )d f t f t dt′′= . Vi phân cấp cao hơn được định nghĩa tương tự.
Nhận xét. Từ công thức (1) ta thấy ngay vi phân của f tại t là xấp xỉ tuyến tính của hàm tại lân cận điểm này. Ngoài ra, vì ( )df t chỉ sai khác '( )f t một thừa số dt nên ( )df t có hướng trùng với hướng tiếp tuyến của ( )f t tại t.
Định lý Taylor sau đây cho phép tính xấp xỉ giá trị của f trong lân cận của t0 thông qua các đạo hàm của f tại t0.
Định lý. Giả thiết ( )f t có đạo hàm cấp m tại t0. Khi ấy ta có công thức Taylor

94 Giải tích các hàm nhiều biến
( )0 0 0 0
1( ) ( ) ( ) ... ( )!m m mf t t f t f t t f t t tm∆ ∆ ∆ α∆′+ = + + + + ,
trong đó α là đại lượng vectơ vô cùng bé khi ∆t dần tới 0.
Chứng minh. Áp dụng công thức Taylor cho từng hàm thành phần ( )if t ta có
( )0 0 0 0
1( ) ( ) ( ) ... ( )!m m m
i i i i if t t f t f t t f t t tm∆ ∆ ∆ α ∆′+ = + + + + , với i= 1,2,...,n,
trong đó iα là các đại lượng vô cùng bé khi 0t∆ → . Vì 0 1 0 0( ) ( ( ),..., ( ))nf t f t f t= , ( )( ) ( )
0 1 0 0( ) ( ( ),..., ( ))kk knf t f t f t= và vectơ 1( ,..., )nα α cũng là đại lượng vectơ vô
cùng bé khi 0t∆ → nên ta suy ra ngay công thức Taylor cho hàm vectơ.
Chú ý. Trong công thức Taylor, thành phần dư mmR tα∆= nói chung không thể
biểu diễn dưới dạng Lagrange như đối với hàm số trong trường hợp ( )f t có đạo hàm cấp m+1 mà chỉ có thể đánh giá như sau: tồn tại ( )1,..., 1,1nλ λ ∈ − sao cho
( )( 1) ( 1)0 1 01
1 ( ),..., ( )( 1)!mm m
m n nR t f t t f t tm ∆ λ ∆ λ ∆+ += + ++ .
Thông thường 1,..., nλ λ là những hằng số khác nhau nên các đạo hàm cấp (m+1) của các hàm thành phần được đánh giá tại những điểm khác nhau quanh t0.
Hệ quả. Giả thiết f khả vi tại mọi điểm của [a,b] và || '( ) ||f t α≤ với mọi [ , ]t a b∈ . Khi ấy
( ) ( )f b f a b aα− ≤ − .
Chứng minh. Đặt ( ) ( )u f b f a= − và xét hàm số ( ) : ( ),t f t uϕ =< > . Hàm này khả vi trên đoạn [ , ]a b cho nên áp dụng công thức Taylor ta tìm được số ( , )t a b∈ để
( ) ( ) '( ), ( )b a f t u b aϕ ϕ− =< > − . Từ đây ta có đánh giá 2( ) ( ) ( ) ( ) '( ), .( ) '( ) . .( )f b f a b a f t u b a f t u b aϕ ϕ− = − =< > − ≤ − ≤
( ) ( ) .( )f b f a b aα≤ − −
và suy ra bất đẳng thức cần tìm.
3.2.6. Tích phân
1. Khái niệm Đối với hàm vectơ ( )f t , việc định nghĩa tích phân xác định hoàn toàn tương
tự như trường hợp hàm số. Từ định nghĩa chúng ta có ngay công thức tích phân của hàm vectơ thông qua tích phân của các hàm thành phần: ( )f t khả tích trên [a,b] khi và chỉ khi 1( ),..., ( )nf t f t khả tích trên [a,b] và
Chương 3. Hàm vectơ 95
1( ) ( ) ,..., ( )b b b
na a a
f t dt f t dt f t dt =
∫ ∫ ∫ (1)
Hàm vectơ ( )F t gọi là nguyên hàm (hay phản đạo hàm) của hàm ( )f t nếu '( ) ( )F t f t= .
Tương tự như hàm số, công thức Leibniz tính tích phân qua nguyên hàm cho hàm vectơ là
( ) ( ) ( )b
a
f t dt F b F a= −∫
Nếu một nguyên hàm của ( )f t là ( )F t thì với mọi vectơ hằng v, hàm ( )F t ν+ cũng là nguyên hàm của ( )f t . Ta viết
( ) ( )f t dt F t v= +∫
và gọi là tích phân bất định của ( )f t . Cũng như công thức (1), công thức tính tích phân bất định là
( )1( ) ( ) ,..., ( )nf t dt f t dt f t dt=∫ ∫ ∫ .
2. Ứng dụng
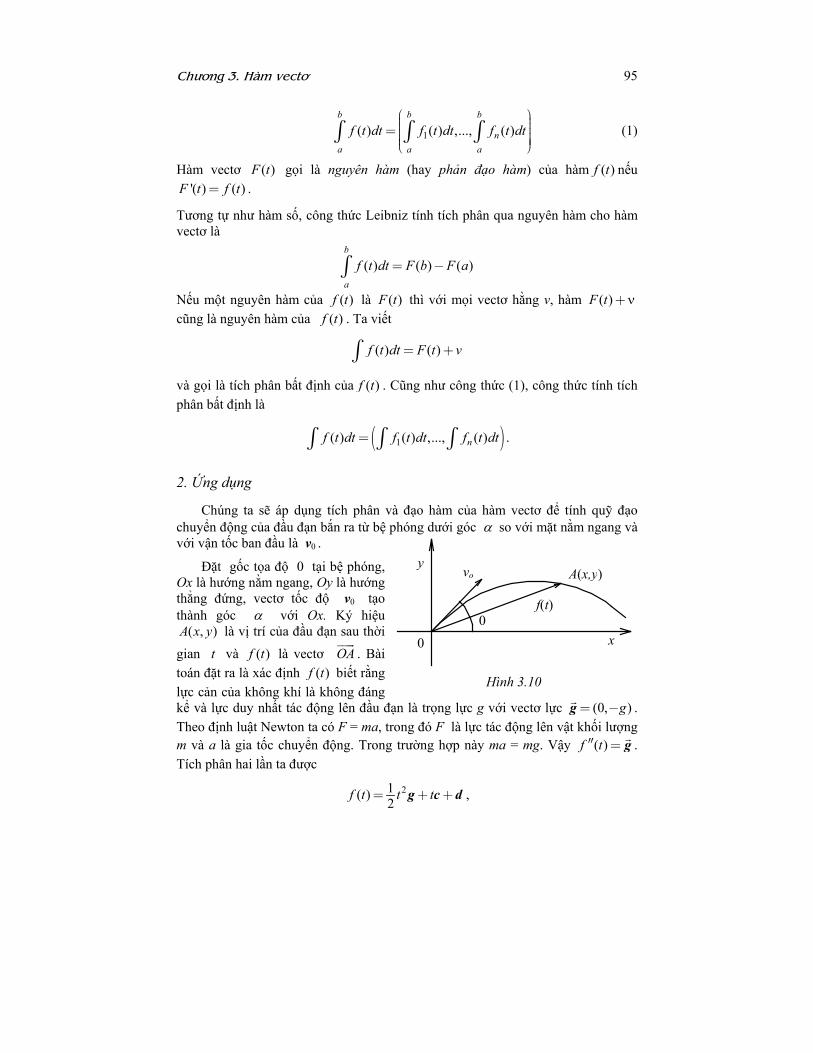
Chúng ta sẽ áp dụng tích phân và đạo hàm của hàm vectơ để tính quỹ đạo chuyển động của đầu đạn bắn ra từ bệ phóng dưới góc α so với mặt nằm ngang và với vận tốc ban đầu là v0 .
Đặt gốc tọa độ 0 tại bệ phóng, Ox là hướng nằm ngang, Oy là hướng thẳng đứng, vectơ tốc độ v0 tạo thành góc α với Ox. Ký hiệu
( , )A x y là vị trí của đầu đạn sau thời gian t và ( )f t là vectơ OA . Bài toán đặt ra là xác định ( )f t biết rằng lực cản của không khí là không đáng kể và lực duy nhất tác động lên đầu đạn là trọng lực g với vectơ lực (0, )g= −g . Theo định luật Newton ta có F = ma, trong đó F là lực tác động lên vật khối lượng m và a là gia tốc chuyển động. Trong trường hợp này ma = mg. Vậy ( )f t′′ = g . Tích phân hai lần ta được
21( ) 2f t t t= + +g c d ,
0
y
x
f(t)
vo A(x,y)
0
Hình 3.10

96 Giải tích các hàm nhiều biến
trong đó vectơ hằng c và d được xác định bởi các điều kiện khởi đầu (0) 0f = và 0'(0)f ν= . Kết quả thu được là
20
1( ) 2f t t t= +g v .
Vì 0 0 0( cos , sin )α α=v v v , các thành phần của ( )f t sẽ là
( )20 0
1cos , sin2t gt tα α− +v v .
Để xác định khi nào đầu đạn rơi chạm đất, ta chỉ cần giải phương trình
22 0
1( ) || || sin 0, 02f t t t tα=− + = >g v ,
để tìm ra t rồi thay vào
1 0( ) ( cos )f t tα= v
và tìm khoảng cách xa nhất mà đầu đạn đi được (kết quả là 2
0 sin 2g
αv).
3.3. Hàm vectơ nhiều biến 3.3.1. Khái niệm
Cho X ⊆ Rm và f là một phép ứng đơn trị từ X vào Rn. Nếu m = 1 thì f
là hàm vectơ một biến đã xét ở phần trước. Nếu 1m> và n = 1 thì f là hàm số nhiều biến đã trình bày ở Chương 2. Khi 1m> và 1n> ta nói f là hàm vectơ nhiều biến. Để cho gọn và dễ phân biệt ta sẽ dùng từ “ánh xạ” để chỉ hàm vectơ nhiều biến (đơn trị).
Nếu cố định một hệ tọa độ của Rn (hệ tọa độ Descartes được xem là hệ tọa độ
mặc định) thì với mỗi X∈x , giá trị ( )f x là một vectơ trong Rn có n tọa
độ: ( )1 2( ) ( ), ( ),..., ( )nf f f f=x x x x . Những tọa độ này là hàm số biến x, xác định trên X và được gọi là những hàm tọa độ (hay hàm thành phần) của f. Như vậy mỗi ánh xạ f từ X vào Rn có n hàm tọa độ 1 2, ,..., nf f f . Ngược lại, cho n hàm số
1 2, ,..., nf f f xác định trên tập X ta sẽ có một ánh xạ duy nhất f từ X vào Rn
nhận 1 2, ,..., nf f f là những hàm tọa độ (với đúng thứ tự trên) và ánh xạ này được cho bởi công thức
( )1 2( ) ( ), ( ),..., ( )nf f f f=x x x x với mọi x∈X.

Chương 3. Hàm vectơ 97
Từ mối liên quan trên giữa ánh xạ và các hàm tọa độ chúng ta có thể khảo sát ánh xạ thông qua tính chất của các hàm nhiều biến như khi khảo sát hàm vectơ một biến ở phần trước vậy. Ví dụ, 1( ,..., )ny y=y ∈ Rn là giới hạn của ( )f x khi x dần
tới x0 khi và chỉ khi với mọi 1,...,i n= , iy là giới hạn của ( )if x khi x dần tới x0; f liên tục tại x0 khi và chỉ khi 1 2, ,..., nf f f liên tục tại điểm này. Sau đây là một vài thí dụ hàm vectơ nhiều biến.
Thí dụ
1) Lấy X = Rm, A là ma trận cỡ (n×m) và b là một vectơ trong Rn. Khi ấy
• f(x) = b với mọi x ∈ Rm là một ánh xạ hằng;
• f(x) = Ax với mọi x ∈ Rm là một ánh xạ tuyến tính;
• f(x) = Ax+b với mọi x ∈ Rm là một ánh xạ affine.
2) Cho ( ){ }2 2 21 2 1 2, : 1X x x R x x= ∈ + ≤ là hình tròn đơn vị trong R2. Khi ấy
2 21 2 1 2 1 2( , ) ( , , 1 ( ) )f x x x x x x= − − +
với mọi 1 2( , )x x X∈ là một ánh xạ từ X vào R3. Các hàm thành phần của f là
1 1 2 1
2 1 2 2
2 23 1 2 1 2
( , ) ,( , ) ,
( , ) 1 ( ) .
f x x xf x x x
f x x x x
=−=
= − +
3) Lấy X = R2 và R3 được trang bị hệ tọa độ trụ ( , , )r zθ . Xét các hàm
2 21 1 2 1 2( , )f x x x x= + ,
21
12 1 2
2 1
arctan 0( , )
sgn( ) 02
x xxf x xπ x x
khi
khi
≠ = =
,
3 1 2( , ) 0f x x = .
Khi ấy 1 2 3( , , )f f f f= là ánh xạ đồng nhất từ R2 vào mặt phẳng z = 0 trong R3.
98 Giải tích các hàm nhiều biến
3.3.2. Ma trận Jacobi
Cho f là ánh xạ từ Rm vào Rn với các hàm tọa độ 1,..., nf f . Giả thiết rằng
các hàm tọa độ if có đạo hàm riêng i
j
fx
∂∂
. Khi ấy ma trận
1 1
1
1
( ) ( )......
......( ) ( )......
m
n n
m
f fx x
f fx x
∂ ∂∂ ∂
∂ ∂∂ ∂
x x
x x
được gọi là ma trận Jacobi của f tại x và ký hiệu là ( )fJ x .
Nhận xét rằng hàng của ma trận Jacobi chính là gradient của các hàm 1 2, ,..., nf f f . Do vậy ta có thể viết ma trận Jacobi như sau
1grad ( )( )
grad ( )f
n
fJ
f
=
xx
x
Thí dụ
1) Xét ánh xạ affine ( )f = +x Ax b , ta có ngay ( )fJ =x A với mọi x ∈ Rn.
2) Ma trận Jacobi của ánh xạ f trong Thí dụ 2 sẽ là
1 2
1 22 2 2 21 2 1 2
1 0( , ) 0 1
1 ( ) 1 ( )
fJ x xx x
x x x x
− = − − − + − +
với mọi (x1,x2) thỏa mãn 2 21 2 1x x+ < .
3) Xét ánh xạ f từ R3 vào R3 cho bởi công thức sau trong hệ tọa độ cực
( , , ) ( cos sin , sin sin , cos )f r r r rθ ϕ θ ϕ θ ϕ ϕ= .
Khi ấy ma trận Jacobi của f tại ( , , )r θ ϕ sẽ là

Chương 3. Hàm vectơ 99
cos sin sin sin cos cos( , , ) sin sin cos sin sin cos
cos 0 sinf
r rJ r r r
r
θ ϕ θ ϕ θ ϕθ ϕ θ ϕ θ ϕ θ ϕ
ϕ ϕ
− = − .
3.3.3. Ánh xạ khả vi
Giả sử f là một ánh xạ từ tập mở X ⊆ Rm vào Rn. Ta nói f là khả vi tại
điểm x ∈ X nếu tồn tại một ánh xạ tuyến tính A từ Rm vào Rn sao cho với mọi h
∈Rm, X+ ∈x h , ta có
( ) ( ) ( )f f α+ = + +x h x Ah h , (1)
trong đó ( )α h thỏa mãn điều kiện
0
( )lim
α→h
hh
= 0 . (2)
Ánh xạ tuyến tính A trong biểu thức (1) được gọi là đạo hàm của f tại x và thường được ký hiệu là '( )f x .
Khi ∆=h x là đủ nhỏ thì đại lượng ∆A x có tên gọi là vi phân của ánh xạ f tại x ứng với số gia ∆x và được ký hiệu là ( )df x . Với ánh xạ đồng nhất f(x)=x ta có A là ma trận đơn vị, nên d ∆=x x . Suy ra, trong trường hợp chung, ta có
( ) '( )df f d∆= =x A x x x .
Nhận xét rằng nếu f khả vi tại x thì từ (1) ta thấy có thể được xấp xỉ bởi ánh xạ affine ( ) ( )f′ ′+ −x x A x x với độ sai khác là ( )α ′−x x , một đại lượng vô cùng bé so với ′−x x khi x’ đủ gần x.
Thí dụ. 1) Xét ánh xạ affine ( )f = +x Ax b . Với ánh xạ tuyến tính A này và ánh xạ α đồng nhất bằng 0, ta thấy (1) và (2) thỏa mãn. Vậy f khả vi tại mọi điểm x và đạo hàm '( )f =x A .
2) Ánh xạ f từ R2 vào R2 cho bởi công thức
1 2 1 2( , ) ( , )f x x x x= .
Chúng ta khảo sát tính khả vi của f tại điểm x = (0,0). Nếu như f khả vi tại điểm
này thì ta phải tìm được ánh xạ tuyến tính cho bởi ma trận cấp hai a bc d
và ánh
xạ 1 2 1 1 2 2 1 2( , ) ( ( , ), ( , ))x x x x x xα α α= sao cho
( ) ( )1 2 1 2 1 1 2 2, ( ), ( )h h ah bh h ch dh hα α= + + + +

100 Giải tích các hàm nhiều biến
với mọi 1 2( , ) h h=h ∈ R2 , trong đó 1( )|| ||
α hh và 2 ( )
|| ||α h
h dần tới 0 khi ||h|| dần
tới 0. Từ đẳng thức trên lấy h2 = 0 ta có a = 1, c = 0. Nếu lấy h1 = 0 thì b = 0 và d = 1 khi 2 0h > ; d = -1 khi 2 0h < . Điều này không thể được vì ánh xạ tuyến tính A trong (1) không phụ thuộc vào h. Chứng tỏ f không khả vi tại điểm (0,0).
Định lý sau đây cho phép chúng ta xem xét tính khả vi và cách tính đạo hàm của ánh xạ thông qua các hàm tọa độ.
Định lý. Giả thiết 1( ,..., )nf f f= là một ánh xạ từ tập mở X ⊆ Rm vào Rn. Khi
ấy f khả vi tại X∈x nếu và chỉ nếu các hàm tọa độ 1,..., nf f khả vi tại x và ta có
1( )( )
( )n
ff
f
′ ′ = ′
xx
x. (3)
Chứng minh. Nếu f khả vi tại x thì ta có (1). Ký hiệu 1,..., nA A và 1,..., nα α là những hàm tọa độ của A và α. Khi ấy với mọi i ta có
( ) ( ) ( ) ( )i i i if f A α+ = + +x h x h h (4)
với mọi h ∈ Rm. Ngoài ra (2) cũng kéo theo
0
|| ( ) ||lim || ||iα
→h
hh = 0 , (5)
nó chứng tỏ if khả vi tại x0 với đạo hàm ( )i if A′ =x . Công thức (3) là hiển nhiên vì '( )f =x A .
Ngược lại, giả thiết 1,..., nf f khả vi tại x. Khi ấy (4) và (5) đúng, trong đó iA là đạo hàm của if tại x. Xét ánh xạ tuyến tính A với các hàm tọa độ 1,..., nA A và ánh xạ α với các hàm tọa độ 1,..., nα α . Từ (4) có ngay (1) và từ (5) có ngay (2). Chứng tỏ f là khả vi tại x và đạo hàm của nó được cho bởi công thức (3). Định lý được chứng minh xong.
Áp dụng định lý cho ánh xạ trong Thí dụ 8 ta sẽ thấy ngay là ánh xạ này không khả vi tại x = 0 vì hàm tọa độ thứ hai không khả vi tại đó.
Hệ quả sau đây cho ta một số tính chất quan trọng của đạo hàm tương tự như trường hợp hàm số.
Hệ quả. Giả thiết 1( ,..., )nf f f= khả vi tại x. Khi ấy
i) f liên tục tại x; ii) Đạo hàm '( )f x là duy nhất;

Chương 3. Hàm vectơ 101
iii) Các hàm tọa độ 1,..., nf f có đạo hàm riêng tại x và ma trận Jacobi của f trùng với ma trận của đạo hàm '( )f x ;
iv) Với mỗi λ ∈ và mọi ánh xạ g:X→Rn khả vi tại x , các ánh xạ
, .f f gλ và f g+ khả vi tại x và ta có
( ) ( ) ( )f fλ λ′ ′=x x ;
( ) ( ) ( ) ( )f g f g′ ′ ′+ = +x x x ;
( . ) '( ) '( ).[ ( )] ( ).[ '( )]T Tf g f g f g= +x x x x x ,
trong đó TA là ký hiệu ma trận chuyển vị của ma trận A.
Chứng minh. Suy trực tiếp từ định lý và từ các tính chất tương ứng của hàm nhiều biến khả vi (Chương 2).
Lưu ý rằng, cũng như đối với hàm nhiều biến, một ánh xạ liên tục không nhất thiết phải khả vi (xem thí dụ trên) và sự tồn tại của ma trận Jacobi cũng không kéo theo tính khả vi của ánh xạ. Thí dụ đơn giản sau đây sẽ minh họa điều đó.
Nếu ánh xạ f là khả vi tại mọi điểm trên tập mở X thì ta nói nó là khả vi trên X. Khi ấy, nếu đạo hàm của các hàm thành phần '(.)if là những ánh xạ liên tục trên X thì ta nói f là ánh xạ khả vi liên tục trên X.
Thí dụ. Xét ánh xạ f từ R2 vào R2 cho bởi công thức
1 1 2
1 22 1 2
1 1 2
( , ) 0 ,0 ,
( , ) .
f x xx x
f x xx x x
= ≠= =
nÕu
nÕu
Rõ ràng f1 và f2 có đạo hàm riêng tại 0 và ma trận Jacobi của f tại điểm này là ma trận đồng nhất bằng 0. Thế nhưng f không khả vi tại 0.
Ngoài hai công thức tính đạo hàm của ánh xạ nêu trong hệ quả iv), quy tắc dây xích dưới đây rất hữu ích trong việc tính đạo hàm của ánh xạ hợp. Quy tắc này là mở rộng của kết quả trong Mục 2.1.4 (Chương 2).
Định lý. Giả thiết f là ánh xạ từ tập mở X ⊆ Rm vào tập mở Y ⊆ Rn, khả vi tại
x ∈ X và g là ánh xạ từ Y vào Rl, khả vi tại ( ) f=y x . Khi ấy ánh xạ hợp g f
từ X vào Rl khả vi tại x và đạo hàm của nó được tính theo công thức
( ) '( ) ( ) ( )g f g f′ ′=x y x .

102 Giải tích các hàm nhiều biến
Chứng minh. Vì f và g khả vi nên tồn tại các ánh xạ α (từ Rm vào Rn ) và β
(từ Rn vào Rl ) sao cho:
( ) ( ) ( )( ) ( ), ,
( ) ( ) ( )( ) ( ), ,
m
n
f f f
g g g
α
β
víi
víi
′+ = + + ∈′+ = + + ∈
x h x x h h h
y u y y u u u (1)
và
0 0
( ) ( )lim 0, lim 0|| || || ||
α β→ →
= =h u
h uh u .
Đặt ( )( ) ( )h f α′= +u x h h , ( ) ( )( ( )) ( )hgγ α β′= +h y h u , ( ) ( )g f′ ′=A y x .
Khi ấy ta có những nhận xét sau
0lim 0h→
=h
u ,
0lim ( )h f→
′≤h
ux
h.
Từ những nhận xét này và (1) suy ra, với mọi h ∈ Rm ,
( )( ) ( ) ( ) ( )g f g γ+ = + +x h y A h h ,
trong đó 0 0
( ) ( ) ( ) lim lim ( ) . 0h h
hg
γ α β→ →
′ ≤ + = h h
h h u uy
h h u h. Điều này chứng
tỏ ánh xạ hợp g f khả vi tại x với đạo hàm bằng A. Định lý được chứng minh xong.
Chú ý. Định lý cho ta một điều kiện đủ để nhận biết tính khả vi của ánh xạ hợp. Tuy nhiên đây không phải là điều kiện cần. Thí dụ, xét ánh xạ hằng ( ) 0g y = thì với mọi f, ánh xạ hợp g f đều khả vi.
Thí dụ. Cho f từ R2 vào R3 và g từ R3 vào R2 xác định theo công thức
2 21 2 1 2 1 2
1 2 3 1 2 3
( , ) ( 1, , ) ,
( , , ) ( , ) .
f x x x x x x
g y y y y y y
= + +
= +
Tính đạo hàm của hàm hợp g f tại (0,0).
Giải. Nhận xét rằng (0,0) (1,0,0)f = ; ánh xạ f khả vi tại mọi điểm còn g khả vi tại mọi điểm với 1 0y > , nói riêng tại (0,0)y f= . Như vậy g f khả vi tại (0,0) và đạo hàm ( ) '(0,0)g f là

Chương 3. Hàm vectơ 103
( )0 01 0 00 02(0,0) 0 0
1 10 1 1 1 1g f
′ = = .
3.3.4. Định lý ánh xạ ngược
Trong giáo trình Giải tích một biến chúng ta đã biết nếu hàm số f liên tục và tăng (hoặc giảm) trong khoảng ( , )a b ⊆R thì sẽ tồn tại hàm ngược 1f − liên tục,
tăng từ khoảng ( ( ), ( ))f a f b vào (a,b). Ngoài ra nếu f khả vi với đạo hàm khác 0 trên khoảng (a,b) thì 1f − cũng khả vi trên khoảng ( ( ), ( ))f a f b với
1 1( ) '( )( )
f xf x
− = ′ . Đối với ánh xạ, khái niệm tăng hay giảm không còn thích hợp
cho nên việc xác định ánh xạ ngược đòi hỏi những điều kiện ngặt nghèo hơn. Trước hết ta nhắc lại khái niệm ánh xạ ngược. Cho U và V là hai tập mở trong Rn và f là ánh xạ từ U vào V. Ta nói rằng f có ánh xạ ngược 1f − từ V vào U
nếu 1f f − và 1f f− là những ánh xạ đồng nhất trên V và trên U.
Thí dụ
1) Xét phép tịnh tiến f từ Rn vào Rn cho bởi công thức ( )f = +x x a , trong đó
a là một vectơ hằng. Khi ấy 1( )f − = −x x a cũng là một phép tịnh tiến (bởi vectơ -a ).
2) Giả sử f từ Rn vào Rn là ánh xạ tuyến tính cho bởi ma trận vuông không suy
biến ( )f =x Ax . Khi ấy 1 1( )f − −=x A x , trong đó 1−A là ma trận nghịch đảo của ma trận A.
3) Xét ánh xạ f từ Rn vào Rn cho bởi công thức
1 2( ,..., ) (0, ,..., )n nf x x x x=
với mọi 1( ,..., )nx x ∈Rn. Khi ấy f không có ánh xạ ngược. Thật vậy, nếu tồn tại 1f − thì lấy (1,0,...,0)=y và giả sử 1
1 2( ) ( , ,..., )nf a a a− =y , ta có
12( ) (0, ,..., )nf f a a− =y
là một vectơ khác y. Điều này mâu thuẫn với định nghĩa.
Nói chung, việc xác định tường minh ánh xạ ngược của một ánh xạ cho trước là công việc rất khó khăn. Tuy nhiên trong nhiều bài toán người ta chỉ cần xem ánh xạ cho trước có ánh xạ ngược hay không. Định lý quan trọng sau đây cho ta một điều kiện bảo đảm sự tồn tại của ánh xạ ngược.

104 Giải tích các hàm nhiều biến
Định lý. (Ánh xạ ngược) Giả thiết f là ánh xạ khả vi liên tục từ tập mở 0U
trong Rn vào Rn sao cho ma trận Jacobi 0( )fJ x không suy biến với mọi 0 0U∈x .
Khi ấy tồn tại lân cận 0U U⊆ của điểm x0 và lân cận V của điểm f(x0) sao cho f có ánh xạ ngược 1f − từ V vào U khả vi tại mọi điểm y ∈ V với
( ) ( )( ) 11 1( ) ( )f f f−− −′
′=y y .
Chứng minh. Ký hiệu A là ma trận Jacobi của ánh xạ f tại 0x . Theo giả thiết det 0≠A , nên A là song ánh. Ký hiệu ánh xạ ngược của A là 1−A , S là mặt cầu đơn vị và B là hình cầu đơn vị trong Rn. Trước hết chúng ta có những nhận xét
sau:
1) Tồn tại 0ε> để 2A ε>v v với mọi 0≠ν .
Thật vậy, nếu điều này sai thì, do A là tuyến tính, với 1kε= tìm được , 1k k =v v
để 2k k≤Av . Do S compact nên ta có thể xem như kv hội tụ tới v ∈ S khi
k →∞ . Ta có ngay 0=Av trái với tính song ánh của A.
2) Với 0ε> đã biết, tìm được 0δ> sao cho với mọi 0 Bδ∈ +x x và mọi 0≠ν , ta có
( )( ) 2f ε′ − <x v Av v , ( )( )f ε′ >x v v ;
tức là '( )f x đủ gần A.
Thật vậy bất đẳng thức đầu suy từ tính liên tục của ánh xạ đạo hàm ( )f ′x x còn bất đẳng thức sau suy từ tính liên tục nêu trên và nhận xét thứ nhất.
3) Trong khuôn khổ của nhận xét trên, với mọi 0, Bδ′ ∈ +x x x ta có
( ) ( ) 2f f ε′ ′− > −x x x x ,
nghĩa là hàm f có tính chất dãn. Thật vậy, xét hàm ( ) ( )f f= −x x Ax . Từ nhận
xét trên ta có ( )( ) 2f ε′ <x v v , với mọi 0 Bδ∈ +x x và mọi v∈Rn. Theo hệ quả
của công thức Taylor:
( ) ( ) ( ) ( ) ( ) 2f f f f ε′ ′ ′ ′− = − − − ≤ −x x x x A x x x x .
Mặt khác cũng theo nhận xét trên ta có
( ) ( ) ( ) ( ) ( ) ( )f f f f′ ′ ′ ′− − − ≥ − − − >x x A x x A x x x x
Chương 3. Hàm vectơ 105
( ) ( )f fε ′ ′> − − −x x x x
Kết hợp những bất đẳng thức này ta có điều mong muốn.
4) Tồn tại 0r> để 0 0( ( ) 2 ) ( )f rB f Sδ+ ∩ + =∅x x . Thật vậy, do f liên tục nên tập ảnh 0( )f Sδ+x là compact. Từ nhận xét 3) ta thấy 0 0( ) ( )f f Sδ∉ +x x cho nên tìm được r>0 đủ nhỏ để 0 0( ( ) 2 ) ( )f rB f Sδ+ ∩ + =∅x x như yêu cầu.
Bây giờ ta xây dựng các tập U, V và ánh xạ 1f − như sau. Lấy
0( ) int( )V f rB= +x ,
{ }0 int( ) : ( )U B f Vδ= ∈ + ∈x x x ,
trong đó int(...) ký hiệu phần trong của tập trong ngoặc.
Vì f liên tục nên { } 10 int( ) ( )U B f Vδ −= + ∩x là tập mở. Để xây dựng 1f −
ta phải chỉ ra rằng với mọi y ∈ V tồn tại duy nhất một x ∈ U để ( )f =x y , và khi ấy phép ứng →y x chính là ánh xạ ngược 1f − cần tìm.
Trước hết ta chứng minh sự tồn tại của x (với y ∈ V cố định bất kỳ). Muốn thế xét hàm số
2( ) ( )fϕ = −z y z .
Đây là hàm khả vi liên tục trên tập compact 0 Bδ+x nên sẽ đạt cực tiểu tại một điểm x nào đó. Điểm x không thể nằm trên biên của tập 0 Bδ+x vì với z trên biên tập này ta có
( )22 2 20 0 0( ) ( ) ( ) ( ) ( ) ) (2 ) ( ( ))f f f f r r r fϕ ϕ= − = − − − ≥ − = >z y z x z x y x .
Như vậy U∈x và áp dụng định lý về điều kiện cần của cực tiểu đối với hàm nhiều biến ta có
0 ( ) 2 ( )( ( ))f fϕ′ ′= =− −x x y x .
Do '( )f x là song ánh nên điều này chỉ xảy ra khi ( )f=y x . Như vậy, với mỗi V∈y cho trước, ta đã tìm được U∈x như yêu cầu. Tính duy nhất của x suy
ngay từ Nhận xét 3). Cũng từ nhận xét này ta thu được tính liên tục của 1f − .
Công việc còn lại là chứng minh 1f − khả vi tại 0 0( )f=y x . Tính khả vi tại
các điểm khác của V được chứng minh tương tự. Cho h∈Rn bất kỳ thỏa mãn
0 V+ ∈y h . Đặt 10 0( )f −= + −u y h x . Vì f khả vi tại x0 , tồn tại ánh xạ α từ
Rn vào Rn sao cho
0 0( ) ( ) ( ) ( ) f f α+ = + +x v x A v v ,

106 Giải tích các hàm nhiều biến
với mọi n∈v , 0 U+ ∈x v và ( )α ν là đại lượng vô cùng nhỏ của v.
Đặt 1( ) ( ( ))β α−=−h A u , trong đó 10 0( )f −= + −u y h x . Khi ấy
1 1 10 0( ) ( ) ( ) ( )f f β− − −+ = + +y h y A h h .
Từ tính liên tục của 1f − , tính liên tục của ánh xạ 1A− và từ nhận xét 3) ta thấy 0→h kéo theo các đại lượng sau tiến dần tới 0:
11 1
( ( ))( )( ) ( ) ; ;f f
αα−
− −+ −A uu
y h yu u
.
Chứng tỏ 0
( )lim 0
β→
=h
hh
và do đó 1f − khả vi tại x0 với đạo hàm đúng bằng
1−A . Định lý được chứng minh xong.
Thí dụ. Xét hàm vectơ f từ R3 vào R3 cho bởi công thức 2( , , ) (sin , ,2 )f x y z x y y z z x= + + + .
Tại điểm (0,0,0) , giá trị của hàm là (0,0,0) và ma trận Jacobi là 1 1 0
(0,0,0) 0 1 10 0 2
fJ =
.
Ma trận này không suy biến, nên theo định lý hàm ngược, tại lân cận đủ nhỏ của gốc tọa độ, tồn tại hàm ngược 1f − (mặc dù không có biểu thức tường minh), và ma trận Jacobi của hàm ngược tại (0,0,0) là
11
1 1 1/ 2(0,0,0) [ (0,0,0)] 0 1 1/ 2
0 0 1/ 2ffJ J−
− − = = −
.
3.3.5. Hàm ẩn
Giả sử f là ánh xạ từ tập mở n mZ ⊆ × vào Rm và 0 0( , ) Z∈x y là điểm
sao cho
0 0( , )f =x y 0 .
Nếu như tồn tại ánh xạ ϕ trong lân cận nào đó của 0x vào Rm sao cho
0 0( )ϕ =x y và với mọi x trong lân cận đó
( , ( ))f ϕ =x x 0 ,
thì ta nói ϕ là hàm ẩn xác định bởi f.

Chương 3. Hàm vectơ 107
Thí dụ
1) Xét f từ R2 vào R cho bởi công thức 2 2( , ) 2f x y x y= + − . Lấy 0 01, 1x y= =
thì (1,1) 0f = . Phương trình ( , ) 0f x y = có thể giải để tìm y theo x
22y x=± − .
Hàm 22y x= − là hàm ẩn thỏa mãn 0 0( )y x y= và ( , ) 0f x y = với mọi x gần 1 ( 2x ≤ ).
2) Xét f từ R3 vào R2 cho bởi công thức
2( , , ) ( , ) (2,3)f x y z x z x y z= + + + − .
Lấy 0 0 01, ( , ) (1,1)x y z= = , ta thấy (1,1,1) 0.f = Giải phương trình ( , , ) 0f x y z =
ta tìm được ánh xạ ϕ từ R vào R2 cho bởi công thức
2 2( ) (1 ,2 )x x x xϕ = − + −
là hàm ẩn được xác định bởi ( , ( )) 0f x xϕ = .
Trong thí dụ trên bằng cách giải phương trình theo ẩn x ta có thể tìm được hàm ẩn. Tuy nhiên việc giải phương trình không phải lúc nào cũng thực hiện được. Trong nhiều trường hợp chúng ta chỉ cần xác định xem có tồn tại hàm ẩn hay không. Định lý sau cho chúng ta một điều kiện đủ để tồn tại hàm ẩn và cách tính đạo hàm của nó.
Định lý. (Hàm ẩn) Giả thiết f là ánh xạ khả vi liên tục từ tập mở
0n mU ⊆ × vào m và 0 0 0( , ) U∈x y là điểm thỏa mãn những điều kiện sau
(i) 0 0( , )f =x y 0 ;
(ii) Ma trận Jacobi của ánh xạ f đối với biến thứ hai y tại điểm 0 0( , )x y không suy biến.
Khi ấy tồn tại lân cận X của x0 trong Rn và ánh xạ khả vi ϕ từ X vào Rm sao
cho a) 0 0( )ϕ =x y ;
b) ( , ( ))f ϕ =x x 0 , với mọi X∈x .
Chứng minh. Xét ánh xạ F từ U0 vào Rn × Rm cho bởi công thức
( , ) ( , ( , )) F f=x y x x y , với mọi 0( , ) U∈x y .
Ma trận Jacobi của F sẽ có dạng
108 Giải tích các hàm nhiều biến
( , )( , ) ( , )F yx
f fJ
J J
=
I 0x y
x y x y,
trong đó I là ma trận đơn vị cấp n, 0 là ma trận cỡ n×m với các thành phần bằng 0; ( , )x
fJ x y là ma trận Jacobi của ánh xạ (., )f y đối với biến x khi y cố định và
( , )yfJ x y là ma trận Jacobi của ánh xạ ( ,.)f x đối với biến y khi x cố định. Vì
0 0( , )yfJ x y không suy biến (Điều kiện (ii)), 0 0( , )FJ x y không suy biến. Áp dụng
định lý ánh xạ ngược ta tìm được ánh xạ khả vi 1F− từ lân cận mở V của
0 0( , )F x y vào lân cận mở 0U U⊆ của 0 0( , )x y . Ánh xạ ngược 1F− có hai thành
phần (ứng với Rn và Rm) và ta có thể viết
1( , ) ( , ( , ))F g− =x v x x v ,
trong đó g là hàm tọa độ thứ hai ứng với Rm. Đặt ( ) ( , ).gϕ =x x 0 Khi ấy một mặt
1( , ( )) ( , ( , )) ( ( , )) ( , )F F g F Fϕ −= = =x x x x 0 x 0 x 0 .
Mặt khác theo định nghĩa
( , ( )) ( , ( , ( ))).F fϕ ϕ=x x x x x
Cho nên ( , ( ))f ϕ =x x 0 . Khi 0=x x , do 10 0 0( , ) ( , )F− =x 0 x y , ta có
0 0 ( )ϕ =x y . Vì 1F− khả vi nên g và ϕ đều là những ánh xạ khả vi. Định lý được chứng minh xong.
Chú ý. Từ định lý trên ta có công thức tính đạo hàm của ϕ như sau: từ b) suy ra ( , ( )) . ( )x yf fϕ ϕ′ ′ ′+ =x x x 0 .
Vậy ( )1( ) ( , ( )) ( , ( )y xf fϕ ϕ ϕ
− ′ ′ ′= − x x x x x . Viết dưới dạng ma trận Jacobi công
thức trên sẽ là
( )1( ) ( , ( )) ( , ( )y x
ffJ J Jϕ ϕ ϕ− = − x x x x x .
3.3.6. Hessian
Giả thiết f là một hàm số xác định trên tập mở U ⊆ Rn. Nếu f khả vi thì:
grad : grad ( )f fx x
là ánh xạ từ U vào Rn.
Chương 3. Hàm vectơ 109
Nếu ánh xạ grad f khả vi thì ta nói f khả vi hai lần và đạo hàm (grad ) '( )f x được gọi là Hessian của f và ký hiệu là ( )fH x . Thực ra (grad ) '( )f x chính là ma trận Jacobi của grad f tại x. Vậy:
2
grad( ) ( ) ( )f fi j
fH J x x∂
∂ ∂
= = x x x .
Nếu các hàm 2
( )i i
fx y∂
∂ ∂x x liên tục thì ta nói f khả vi liên tục hai lần. Từ
định nghĩa của Hessian ta có thể xem phép ứng ( )fHx x
là ánh xạ từ Rn vào Rn×Rn với các hàm tọa độ là
2( ), , 1,...,
i j
f i j nx x∂
∂ ∂=x
và có thể định nghĩa chuẩn của Hessian là 1 222
, 1( ) ( )
n
fi ji j
fH x x∂
∂ ∂=
= ∑x x .
Lưu ý rằng với mỗi x cố định, Hessian ( )fH x cho ta dạng toàn phương trên
R theo công thức: 2
, 1( )( , ) ( )
n
f i ji ji j
fH u u x x∂
∂ ∂==∑x u v x .
Người ta nói dạng toàn phương này là nửa xác định dương nếu:
( )( , ) 0fH ≥x u u , với mọi u∈ Rn ,
và là xác định dương nếu bất đẳng thức trên là ngặt khi u ≠ 0 . Nếu dấu đẳng thức trên đổi chiều thì ta có dạng toàn phương nửa xác định âm hoặc xác định âm.
Thí dụ. Cho hàm hai biến 2 3( )f x, y x xy y= + + .
Khi ấy gradient của f tại (x,y) là
2grad ( , ) ( , )( , ) (2 , 3 )f ff x y x y x y x yx y∂ ∂∂ ∂
= = + + .

110 Giải tích các hàm nhiều biến
Hessian của f tại (x,y) là:
2 2
2
2 2
2
2 1( , ) ( , )
1 6f
f fx yxH x y x y
yf fy x y
∂ ∂∂ ∂∂
∂ ∂∂ ∂ ∂
= =
.
Từ giáo trình Đại số tuyến tính ta biết ma trận trên là xác định dương khi 112y>
và nửa xác định đương khi 112y ≥ .
3.3.7. Cực đại và cực tiểu
Bây giờ chúng ta sẽ sử dụng Hessian để tìm điều kiện cần và đủ cho cực trị địa phương. Nhắc lại rằng x0 ∈ U được gọi là cực đại (cực tiểu) địa phương của hàm f nếu tìm được quả cầu B tâm x0 bán kính 0ε> trong U sao cho:
0 0( ) ( ) ( ( ) ( ))f f f f≥ ≤x x x x với mọi x ∈ B.
Định lý. Giả thiết f khả vi liên tục hai lần trên tập U. Khi ấy, nếu x0 ∈ U là cực tiểu địa phương của hàm f thì:
(i) 0grad ( ) 0f =x .
(ii) 0( )fH x là nửa xác định dương.
Ngược lại, x0 là cực tiểu địa phương của f nếu điều kiện (i) thỏa mãn và
(iii) Tồn tại 0ε> để tại mọi điểm x ∈ U với 0 ε− <x x , Hessian 0( )fH x là nửa xác định dương.
Chứng minh. Giả thiết x0 là cực tiểu địa phương của f. Khi ấy (i) là điều kiện cần đã được chứng minh ở Chương 2. Giả sử điều kiện (ii) không thỏa mãn, tức là tìm được vectơ u∈Rn để 0( )( , ) 0fH <x u u . Xét hàm số 0( ) ( )t f tϕ = +x u với t đủ
nhỏ để 0 t U+ ∈x u . Đây là hàm số từ một lân cận của 0 trong R vào R, thuộc lớp
C2 vì nó là hợp của hàm tuyến tính 0t x tu+ và hàm f. Áp dụng khai triển Taylor (cho hàm 1 biến) ta có
21 1( ) (0) '(0) (0) ( )2 2t t t tϕ ϕ ϕ ϕ α′′= + + + , (*)
trong đó ( )tα là một đại lượng vô cùng nhỏ so với t2, tức là
20
( )lim 0t
tt
α→
= .
Áp dụng quy tắc dây xích ta có
0'( ) grad ( ),t f tϕ =< + >x u u ,

Chương 3. Hàm vectơ 111
0 0''( ) ( ). , ( )( , )f ft H t H tϕ =< + >= +x u u u x u u u .
Lấy giá trị của các đạo hàm trên tại 0t= với điều kiện (i), ta thu được từ (*) biểu thức sau
20 0 0
1 1( ) ( ) ( )( , ) ( )2 2ff t f H t tα+ = + +x u x x u u .
Từ đây suy ra 0 0( ) ( )f t f+ <x u x khi t đủ nhỏ, và điều này mâu thuẫn với tính cực tiểu của 0x .
Để chứng minh phần đảo chúng ta hãy xét công thức Taylor bậc 2 (Chương 2) cho hàm f tại x0:
20 0 0 0
1( ) ( ) grad ( ) ( ( ))2f f f D f τ= + + + −x x x x x x , (**)
trong đó 0 1τ≤ ≤ và D2 là một toán tử vi phân. Ta biết rằng
2 20 0 0 0 0 0( ( )) ( ( ))( , )fD f Hτ τ τ+ − = + − − −x x x x x x x x x x .
Do đó, theo (iii), với mọi x sao cho 0 ε− <x x ta có:
0 0 0( )τ ε+ − − <x x x x
và
0 0 0 0( ( ))( , ) 0fH τ+ − − − ≥x x x x x x x .
Kết hợp bất đẳng thức này với điều kiện (i), công thức (**) cho ta:
0( ) ( ) 0f f− ≥x x , với mọi x ∈ U thỏa mãn 0 ε− <x x .
Như vậy x0 là cực tiểu địa phương của f. Định lý chứng minh xong.
Chú ý
1) Điều kiện (iii) trong định lý có thể thay bằng điều kiện mạnh hơn sau đây:
(iii’) 0( )fH x xác định dương.
Thật vậy, nếu 0( )fH x là xác định dương thì do tính liên tục của các hàm tọa độ 2
( )i j
fx x∂
∂ ∂x , ta sẽ tìm được 0ε> để 0( )fH x cũng là xác định dương mỗi khi
0 ε− <x x . Do đó điều kiện (iii) thỏa mãn.
2) Điều kiện (i) và điều kiện 0( )fH x là nửa xác định dương chưa đủ để kết luận
0x là cực tiểu địa phương như ta đã biết ngay cả khi f là hàm một biến.
3) Đối với cực đại địa phương, các điều kiện được phát biểu tương tự nhưng (nửa) xác định dương được thay bởi (nửa) xác định âm.
112 Giải tích các hàm nhiều biến
Thí dụ. Chứng minh rằng điểm (0,0) là cực tiểu địa phương của hàm 2 2( , )f x y x xy y= + + , nhưng không phải là cực tiểu địa phương của hàm 2 2( , )g x y x xy y= + − .
Giải. Đối với hàm f, ta có grad (0,0) (0,0)f = và
2 1(0,0)
1 2fH =
.
Hiển nhiên là (0,0)fH là xác định dương và f khả vi liên tục hai lần nên điều kiện của định lý trên (xem nhận xét) thỏa mãn. Do đó (0,0) là cực tiểu địa phương của f.
Đối với hàm g ta có grad (0,0) (0,0)g = và
2 1(0,0)
1 2gH = −
.
Hiển nhiên (0,0)gH không phải là nửa xác định dương. Theo định lý, điểm (0,0) không phải là cực tiểu địa phương của g.
3.3.8. Ánh xạ đơn điệu và hàm lồi
Trong giáo trình Giải tích một biến, chúng ta đã biết dùng đạo hàm để khảo sát tính đơn điệu và tính lồi của hàm một biến. Bây giờ, chúng ta sẽ mở rộng cho hàm nhiều biến.
Cho F là ánh xạ từ Rn vào Rn. Ta nói F là đơn điệu nếu
( ).( ) ( ).( ) 0F F− + − ≥x x y y y x , với mọi x,y∈Rn .
Nếu n = 1 thì từ định nghĩa trên suy ra ( ) ( )F x F y≥ với mọi x,y ∈R, x y≥ , có
nghĩa F là hàm không giảm.
Thí dụ
1) Cho 1 11 2
− = − A và ( )F =x Ax , với mọi x ∈R2. Khi ấy F là ánh xạ đơn
điệu. Thật vậy, với mọi x,y ∈R2 ta có:
( )( ) ( )( ) ( ). ( ). 0− + − = + ≥Ax x y Ay y x Ax x Ay y
(vì A là ma trận đối xứng và xác định dương).

Chương 3. Hàm vectơ 113
2) Ánh xạ 2 21 2 1 1 2( ) (2 3 ,3 ), ( , )F x x x x x= − = ∈x x không đơn điệu. Thật vậy,
lấy (1, 1), (0,0)= − =x y , ta có:
( )( ) ( )( ) (2 3,3).(1, 1) 4F F− + − = − − =−x x y y y x .
Chứng tỏ F không phải là đơn điệu.
Mệnh đề. Ánh xạ khả vi liên tục F từ Rn vào Rn là đơn điệu khi và chỉ khi ma
trận Jacobi của F tại mọi điểm là nửa xác định dương.
Chứng minh. Điều kiện cần. Giả thiết trái lại, tồn tại x0 ∈Rn để 0( )FJ x không
phải là nửa xác định dương, tức là tìm được vectơ u ∈Rn sao cho
0( )( , ) 0FJ <x u u .
Do các thành phần của ma trận Jacobi liên tục, tồn tại 0ε> để 0( )( , ) 0FJ t+ <x u u u với mọi t ∈ [0, ε] . (*)
Xét hàm số một biến 0( ) ( ).t F tϕ = +x u u , t ∈ [0, ε].
Đây là hàm khả vi, do đó theo định lý giá trị trung bình tồn tại τ ∈ (0, ε) để ( ) (0) '( ).ϕ ε ϕ ϕ τ ε− =
tức là
0 0 0 0( ) ( ), ( ). , ( )( , )F FF F J Jε τ τ< + − >=< + >= +x u x u x u u u x u u u .
Từ (*) ta suy ra 0 0( ) ( ), 0F Fε< + − ><x u x u , và bất đẳng thức này có thể viết thành
0 0 0 0 0 0( )(( ) ) ( )( ( )) 0F Fε ε ε+ + − + − + <x u x u x x x x u .
Điều này có nghĩa F không phải là đơn điệu.
Điều kiện đủ. Ngược lại, giả thiết ( )FJ x là nửa xác định dương tại mọi điểm.
Khi ấy, với mọi , n∈x y , ta đặt
( ) ( ( )),t F tϕ =< + − − >x y x y x .
Đây là hàm số một biến, khả vi. Áp dụng định lý giá trị trung bình ta tìm được τ ∈ [0,1] sao cho
[ ( ) ( )]( ) (1) (0) '( ) ( ( ))( ) 0FF F Jϕ ϕ ϕ τ τ− − = − = =< − − − >≥y x y x x y x y x .
Nó chứng tỏ F là đơn điệu, điều cần chứng minh.
Thí dụ. Trong phần thứ 2 của thí dụ trên, ma trận Jacobi của F là
21 2
2 6( , )
3 0Fx
J x x − =
.
114 Giải tích các hàm nhiều biến
Rõ ràng tại (1,-1) ma trận này không phải là nửa xác định dương, do đó F không phải là đơn điệu.
Cho f là một hàm số trên Rn. Ta nói f là lồi nếu với mọi x,y ∈Rn, 0 1t≤ ≤ , bất
đẳng thức sau luôn luôn thỏa mãn ( (1 ) ) ( ) (1 ) ( )f t t tf t f+ − ≤ + −x y x y .
Thí dụ. Hàm 2 21 2 1 2( , )f x x x x= + là lồi trên R2.
Thật vậy, với 21 2 1 2( , ), ( , )x x y y= = ∈x y và 0 1t≤ ≤ ta có
2 21 1 2 2( (1 ) ) ( (1 ) ) ( (1 ) )f t t tx t y tx t y+ − = + − + + −x y
2 2 2 21 1 2 2 (1 ) (1 ) ( ) (1 ) ( )tx t y tx t y tf t f≤ + − + + − ≤ + −x y .
Vậy f là hàm lồi. Mệnh đề. Hàm khả vi liên tục f là lồi khi và chỉ khi gradf là ánh xạ đơn điệu.
Chứng minh. Điều kiện cần. Từ tính lồi của f suy ra ( ( )) ( ) ( ) ( )f t f f ft+ − − ≤ −x y x x y x ,
( ( )) ( ) ( ) ( )f t f f ft+ − − ≤ −y y x y x y
với mọi x,y ∈Rn, 0 < t < 1. Qua giới hạn vế trái khi t dần tới 0 và cộng hai bất
đẳng thức ta có grad ( )( ) grad ( )( ) 0f f− + − ≤x y x y x y .
Chứng tỏ grad f là ánh xạ đơn điệu.
Điều kiện đủ. Nếu f không lồi thì sẽ tìm được x,y ∈Rn và t0 ∈ (0,1) sao cho
0 0 0 0( (1 ) ) ( ) (1 ) ( )f t t t f t f+ − > + −x y x y .
Đặt 0 0(1 )t t= + −z x y và giả sử rằng ( ) ( )f f≥x y (trường hợp ( ) ( )f f≤x y chứng minh tương tự). Xét hàm một biến
( ) [ (1 )] [ ( ) (1 ) ( )]t f t t tf t fϕ = + − − + −x x y .
Đây là hàm khả vi liên tục và 0(0) 0, (1) 0, ( ) 0tϕ ϕ ϕ= = < . Áp dụng định lý giá trị trung bình trên từng đoạn 0[0, ]t và 0[ ,1]t ta tìm được số 0(0, )tα∈ , 0( ,1)tβ∈ sao cho
0 0'( ) ( ) (0) 0t tϕ α ϕ ϕ= − < ,
0 0'( )(1 ) (1) ( ) 0t tϕ β ϕ ϕ− = − > .
Suy ra

Chương 3. Hàm vectơ 115
grad ( (1 ) ).( ) [ ( ) ( )] 0f f fα α+ − − − − <x y x y x y
- grad ( (1 ) ).( ) [ ( ) ( )] 0f f fβ β+ − − + − <x y x y x y .
Cộng hai bất đẳng thức trên ta thu được
grad ( (1 ) ).( ) grad ( (1 ) ).( ) 0f fα α β β+ − − − + − − >x y x y x y x y . (*)
Đặt (1 )α α= + −x x y , (1 )β β= + −y x y và lưu ý rằng tồn tại số 0t α β= − < sao cho
( )t− = −x y x y ,
nên bất đẳng thức (*) kéo theo
grad ( )( ) grad ( )( ) 0f f− + − <x x y y y x ,
trái với tính đơn điệu của grad f . Mệnh đề chứng minh xong.
Hệ quả. Hàm f khả vi liên tục hai lần là lồi khi và chỉ khi Hessian ( )fH x tại mọi điểm là nửa xác định dương.
Chứng minh. Suy ra trực tiếp từ hai mệnh đề trên.
Thí dụ. Chứng minh 2 21 2 1 2 1 2( , )f x x x x x x= + + là hàm lồi.
Giải. Bằng tính toán trực tiếp ta có
2 1( )
1 2fH =
x .
Đây là ma trận xác định dương. Vậy theo hệ quả, f là hàm lồi.
3.4. Hàm phức sơ cấp 3.4.1. Điểm lại số phức
Chúng ta đã được biết đơn vị ảo i là số thỏa mãn 2 1i =− , và số phức là số có dạng a bi+ , trong đó a và b là những số thực.
Tập tất cả các số phức được ký hiệu là C. Với số phức z = a + bi bất kỳ, ta
ký hiệu
Re(z) = a phần thực của z;
Im(z) = b phần ảo của z; 2 2z a b= + module hay giá trị tuyệt đối của z;
116 Giải tích các hàm nhiều biến
z a bi= − liên hợp của z.
Những phép tính cơ bản trong C là phép cộng (+), phép trừ (-), phép nhân (*) và
phép chia (:). Cụ thể là, với 1 1 1 2 2 2,z a b i z a b i= + = + ,
ta định nghĩa
1 2 1 2 1 2( ) ( )z z a a b b i+ = + + + ,
1 2 1 2 1 2( ) ( )z z a a b b i− = − + − ,
1 2 1 2 1 2 1 2 2 1* ( ) ( )z z a a b b a b a b i= − + + .
Phép cộng và phép nhân thỏa mãn những quy luật thông thường của số học như:
- luật kết hợp:
1 2 3 1 2 3( ) ( )z z z z z z+ + = + + và 1 2 3 1 2 3* ( * ) ( * ) *z z z z z z= ;
- luật phân phối: 1 2 3 1 2 1 3*( ) * *z z z z z z z+ = +
1 2 3 1 3 2 3( ) * * *z z z z z z z+ = + ;
- luật giao hoán: 1 2 2 1* *z z z z= và 1 2 2 1z z z z+ = + .
• Số 1: 1* z z= .
• Số 0: 0* 0z= và ( 1)* 0z z+ − = .
• Nghịch đảo: Nếu z ≠ 0, nghịch đảo của z ký hiệu là 1z− và là số sao cho 1* 1z z− = .
Ta có ngay 12
zzz
− = .
Nhận xét. Như vậy các phép toán trên số phức có mọi tính chất tương tự như các phép toán trên số thực, và chính xác hơn, trong trường hợp số phức có phần ảo bằng 0 thì chúng chính là các phép toán số học thông thường. Vì vậy, không cần thiết phải phân biệt các phép toán trên trường số phức với các phép toán trên trường số thực, và từ đây ta viết tích của hai số phức 1z và 2z một cách đơn giản là 1 2.z z (thay vì 1 2*z z ).
Thí dụ
1) (1 ).(2 3 ) 5i i i+ − = − .
2) 2.z z z= vì nếu z a bi= + thì z a bi= − và 22 2.z z a b z= + = .
3) Tính (2 ) : (2 )i i+ − . Đặt thương này là z a bi= + . Khi ấy:

Chương 3. Hàm vectơ 117
(2 ) (2 )( ) (2 ) (2 )i i a bi a b b a i+ = − + = + + − .
Suy ra 2 2 a b= + và 1 2b a= − . Chứng tỏ 3 4,5 5a b= = và 3 45 5z i= + .
Chúng ta đã biết tập số thực R có thể biểu diễn bằng trục số Ox. Nếu như trên
mặt phẳng R2 với hệ tọa độ trực chuẩn (Ox,Oy) ta đồng nhất số 1 với điểm (1,0)
và đơn vị ảo i với điểm (0,1), thì mọi số phức z a bi= + có thể đồng nhất với điểm (a,b)∈R2. Mặt phẳng R2 với Ox biểu diễn trục thực và Oy biểu diễn trục ảo còn
được gọi là mặt phẳng phức C.
Nếu dùng hệ tọa độ cực trong R2, thì điểm (a,b) ≠ 0 sẽ có dạng:
( cos , sin )r rθ θ với 2 2r a b= + , cos arθ= .
Như vậy số phức z a bi= + được viết dưới dạng cực là:
(cos sin )z z iθ θ= + .
Số θ được gọi là argument của z, ký hiệu Arg zθ= sai lệch 2kπ (k là số nguyên). Giá trị chính của argument là θ thỏa mãn π θ π− < ≤ và được ký hiệu là arg z.
Trường hợp đặc biệt: Khi 1z = , ta định nghĩa
cos sinie iθ θ θ= + .
Đồng thời, với số phức z a bi= + bất kỳ, ta định nghĩa số mũ phức:
.z a ibe e e= .
Mệnh đề sau sẽ cho thấy số mũ phức có tính chất giống như số mũ thực.
Mệnh đề. Với hai số phức z1 và z2 bất kỳ, ta luôn có:
1 2 1 2.z z z ze e e+ = .
Chứng minh. Giả sử 1 1 1z a ib= + , 2 2 2z a ib= + . Theo định nghĩa: 1 2z ze + = 1 2 1 2 1 2 1 2( ) ( ) ( )a a i b b a a i b be e e+ + + + += = 1 2
1 2 1 2(cos( ) (sin( ))a ae e b b i b b+ + + = = 1 2
1 2 1 2 1 2 2 1(cos cos sin sin (sin cos sin cos ))a ae e b b b b i b b b b− + + =
= 1 21 1 2 2(cos sin ). (cos sin )a ae b i b e b i b+ + = 1 1 2 2a ib a ibe e e e = 1 2.z ze e .
Mệnh đề được chứng minh xong.
Biểu diễn cực của số phức cũng như kết quả trên về số mũ phức cho phép thực hiện nhiều phép tính của số phức một cách đơn giản.
Thí dụ
118 Giải tích các hàm nhiều biến
1) Tính tích z1.z2 dưới dạng cực.
Giải. Ta có 11 1
iz z e θ= , 22 2
iz z e θ= . Vậy 1 2( )1 2 1 2. iz z z z e θ θ+= và có quy tắc
sau: Tích hai số phức z1 và z2 có giá trị tuyệt đối bằng tích các giá trị tuyệt đối của từng thừa số và có argument bằng tổng các argument.
2) Tìm một số phức z sao cho 4 24 iz e π= . Giải. Áp dụng mệnh đề ta có ngay 82 iz e π= .
3) Cho z0 = 1, tìm những số phức z để 0nz z= .
Giải. Biểu diễn z0 dưới dạng cực ta có 20
iz e π= . Khi ấy (2 )i k nkz e π= , k =
0,1,...,n-1 đều là những số phức khác nhau thỏa mãn 0nz z= .
3.4.2. Dãy và chuỗi phức Cho dãy số phức { }nc với n n nc a ib= + . Số phức 0 0 0c a ib= + gọi là giới
hạn của dãy nếu với mọi 0ε> tìm được N để 0nc c ε− < với mọi n N≥ . Khi ấy ta viết:
0lim nnc c
→∞= hay 0nc c→ .
Mệnh đề sau cho phép khảo sát dãy phức bằng các dãy thực và thiết lập các tính chất của dãy phức hội tụ.
Mệnh đề. Dãy phức { }n na ib+ hội tụ tới 0 0a ib+ khi và chỉ khi các dãy thực { }na và { }nb hội tụ tương ứng tới 0a và 0b .
Chứng minh. Theo định nghĩa 2 20 0 0( ) ( )n n nc c a a b b− = − + − , cho nên
{ }0 0 0 0 0max , n n n n na a b b c c a a b b− − ≤ − ≤ − + − .
Do đó sự hội tụ của { }nc tới 0c hoàn toàn tương đương với sự hội tụ của { }na tới
0a và { }nb tới 0b . Mệnh đề được chứng minh xong.
Bây giờ chúng ta xét chuỗi phức:
1 21
...nn
c c c∞
== + +∑
Các tổng riêng 1
n
n kk
u c=
=∑ tạo thành dãy phức { }nu . Nếu dãy tổng riêng hội tụ tới
0u thì ta nói chuỗi hội tụ và tổng của chuỗi 1
nn
c∞
=∑ bằng 0u . Nếu dãy tổng riêng
không hội tụ, ta nói chuỗi phân kỳ.

Chương 3. Hàm vectơ 119
Mệnh đề. Chuỗi 1( )n n
na ib
∞
=+∑ hội tụ khi và chỉ khi các chuỗi số
1n
na
∞
=∑ và
1n
nb
∞
=∑ hội tụ và ta có:
1 1 1( ) ( )n n n n
n n na ib a i b
∞ ∞ ∞
= = =+ = +∑ ∑ ∑ .
Chứng minh. Suy ra trực tiếp từ mệnh đề về hội tụ của dãy.
Với kết quả này, mọi tính chất của chuỗi số thực hội tụ đều đúng với chuỗi phức hội tụ.
3.4.3. Hàm phức
Giả sử Z là tập con trong C và f là đơn ứng từ Z vào C. Khi ấy ta nói f là
hàm phức với biến phức trên tập Z.
Thí dụ
1) ( ) , ( ) arg( ), ( ) , ( ) Re( ),...f z z f z z f z z f z z= = = = là những hàm phức chúng ta đã biết trong phần trước.
2) 0( ) ...nnf z c z c= + + , trong đó 0 ,..., nc c là những hằng số phức, là hàm đa
thức.
Với mỗi z x iy= + , ta có ( )f z u iv= + , và như vậy các giá trị thành phần u và v là những hàm số của z hay của x và y.
Ta nói ( )f z hội tụ tới số phức c khi z dần tới 0z Z∈ nếu với mọi 0ε> tồn tại 0δ> để ( )f z c ε− < mỗi khi 0 0,z z z zδ− < ≠ . Khi ấy ta viết
00lim ( ) ( )
z zf z f z
→= .
Mệnh đề. Khi 0 0 0z x iy= + và 0 0c a ib= + thì:
i) 0
lim ( )z z
f z c→
= khi và chỉ khi 0 0
0( , ) ( , )lim ( , )
x y x yu x y a
→= và
0 00( , ) ( , )
lim ( , )x y x y
v x y b→
= ;
ii) f liên tục tại z0 khi và chỉ khi u và v liên tục tại (x0, y0).
Chứng minh. Hoàn toàn tương tự như trong chứng minh sự hội tụ của dãy phức.
Bằng cách chứng minh trực tiếp ta thấy ngay những hàm phức trong các Thí dụ 1) và 2) là những hàm liên tục.

120 Giải tích các hàm nhiều biến
Các tính chất của hàm phức liên tục tương tự như hàm thực.
3.4.4. Hàm chỉnh hình
Giả sử f là hàm phức xác định trên tập Z ⊆C.
Ta nói f khả vi phức tại z0 ∈ Z nếu tồn tại số c0 ∈C và hàm phức α sao
cho:
0 0 0( ) ( ) ( )f z h f z c h hα+ = + + , (1)
với mọi h có giá trị tuyệt đối đủ nhỏ để 0z h Z+ ∈ và 0
( )lim 0h
hh
α→
= .
Số c0 được gọi là đạo hàm của f tại z0 và ký hiệu là 0'( )f z hoặc 0( )df zdz .
Nếu f khả vi tại mọi điểm z0 ∈ Z, ta nói f khả vi trên Z. Hàm phức khả vi còn được gọi là hàm chỉnh hình. Nhận xét rằng (1) tương đương với:
0 000
( ) ( )limh
f z h f z ch→
+ − = . (2)
Thí dụ
1) Cho ( ) Re( )f z z z= .
Tại z = 0, hàm khả vi vì 0 0
( ) (0) .Re( )lim lim 0h h
f h f h hh h→ →
− = = .
Tại z = 1, hàm không khả vi vì 0 0
(1 ) (1) (1 )Re(1 ) 1lim limh h
f h f h hh h→ →
+ − + + −=
không tồn tại.
2) Hàm ( )f z z= không khả vi tại mọi điểm vì:
• Với h x= (thực) , 0 0( ) ( ) 1f z h f zh
+ − = ;
• Với h iy= (ảo), 0 0( ) ( ) 1f z h f zh
+ − =− , nên giới hạn (2) không tồn tại.
Dưới đây là một tiêu chuẩn đơn giản để kiểm tra tính khả vi của hàm phức thông qua các hàm thành phần.
Định lý. (Cauchy-Riemann) Giả sử f là hàm phức xác định trên miền mở Z ⊆C
và ( , ) Re( ( )), ( , ) Im( ( ))u x y f x iy v x y f x iy= + = + . Khi ấy f khả vi tại
0 0 0z x iy= + khi và chỉ khi u và v khả vi tại 0 0( , )x y và:

Chương 3. Hàm vectơ 121
0 0 0 0( , ) ( , )u vx y x yx y∂ ∂=∂ ∂ , 0 0 0 0( , ) ( , )u vx y x yy x
∂ ∂=−∂ ∂ . (3)
Chứng minh. Trước hết ta nhận xét rằng hàm phức 1 2( ) ( , ) ( , )z x y i x yα α α= + thỏa mãn
0
( )lim 0z
zz
α→
=
khi và chỉ khi
1
( , ) 0
( , )lim 0
( , )x y
x yx y
α→
= và 2
( , ) 0
( , )lim 0
( , )x y
x yx y
α→
= . (4)
Vì vậy, nếu 0 0 0c a ib= + và 1 2( ) ( , ) ( , )h x y i x yα α α= + với 1 2h h ih= + , thì biểu thức (1) tương đương với:
0 1 0 2 0 0 0 0 1 2 1( , ) ( , ) ( , ),( , ) ( , )u x h y h u x y a b h h x yα+ + = +< − >+
0 1 0 2 0 0 0 0 1 2 2( , ) ( , ) ( , ),( , ) ( , )v x h y h v x y b a h h x yα+ + = +< >+ .
Từ (4) và hai đẳng thức này ta có ngay kết quả: f khả vi tại z0 khi và chỉ khi u và v khả vi tại 0 0( , )x y và (3) thỏa mãn vì:
0 0 0 0'( , ) ( , )u x y a b= − và 0 0 0 0'( , ) ( , )v x y b a= .
Định lý được chứng minh xong.
Hệ quả. Nếu f khả vi tại z0 thì đạo hàm 0'( )f z được tính theo các công thức:
0'( )f z = 0 0 0 0 0 0 0 0( , ) ( , ) ( , ) ( , )u v v ux y i x y x y i x yx x y y∂ ∂ ∂ ∂+ = −∂ ∂ ∂ ∂
= 0 0 0 0 0 0 0 0( , ) ( , ) ( , ) ( , )u v v vx y i x y x y i x yx y y x∂ ∂ ∂ ∂− = +∂ ∂ ∂ ∂ .
Chứng minh. Suy ra ngay từ các công thức trong chứng minh của định lý.
Từ định lý ta cũng có các quy tắc tính đạo hàm đối với các hàm khả vi f và g tại z0:
0 0 0( ) '( ) '( ) '( )f g z f z g z+ = + ;
0 0( ) '( ) '( )f z f zλ λ= ;
0 0 0 0 0( ) '( ) '( ) ( ) ( ) '( )fg z f z g z f z g z= + ;
0 0 0 00 2
0
'( ) ( ) ( ) '( )( ) '( )( )
f z g z f z g zf g zg z−= , nếu 0( ) 0g z ≠ .

122 Giải tích các hàm nhiều biến
Ngoài ra, nếu f xác định trên tập mở Z ⊆C, khả vi tại z0 và g xác định trên tập
mở Z ⊆C, khả vi tại 0( )f z Z∈ , thì hàm hợp g f khả vi tại z0 và
0 0 0( ) ' '( ( )) '( )g f z g f z f z= .
3.4.5. Một số hàm sơ cấp
a) Hàm mũ: Hàm mũ trên C được định nghĩa theo công thức:
(cos sin )z x iy xe e e y i y+= = + .
Đôi khi người ta viết exp(z) thay cho ze . Như vậy
( )exp( ) cos sinxz e y i y= + . (1)
Các hàm thành phần khả vi và thỏa mãn điều kiện Cauchy-Riemann, nên hàm mũ khả vi tại mọi điểm và ( ) 'z ze e= .
Một số tính chất của hàm mũ:
• 1 2 1 2z z z ze e e+ = , với z1, z2 ∈ C.
• Hàm mũ là hàm tuần hoàn với chu kỳ 2πi (vì 2z i ze eπ+ = ).
Chú ý. Có thể định nghĩa hàm mũ bằng tổng của chuỗi hội tụ 1
1 !n
n
zn
∞
=+∑ và cũng đi
đến công thức (1) và những tính chất khác như đã nêu ở trên.
b) Hàm logarit: Hàm logarit (ký hiệu là Ln) là hàm ngược của hàm mũ, tức là nếu ze ω= thì Ln( )z ω= . Để chứng minh sự tồn tại của hàm này khi 0ω≠ , ta biểu
điễn
[cos( ) sin( )]z xe e y i y= + , [cos( ) sin( )]iω ω θ θ= + ,
và thu được lnx ω= (loga số thực),
2y kθ π= + (k là số nguyên).
Như vậy, với mọi 0, Ln( )ω ω≠ tồn tại và được cho bởi công thức
Ln( ) ln Arg ln arg 2i i k iω ω ω ω ω π= + = + + .

Chương 3. Hàm vectơ 123
Nhánh chính của hàm này là nhánh ứng với k = 0 và được ký hiệu là ln ω . Từ định lý hàm ngược ta suy ra hàm logarit liên tục và khả vi tại mọi điểm 0ω≠ với đạo hàm tính theo công thức
1 1 1(ln ) '( ) 'z ze e
ωω
= = = .
c) Hàm lũy thừa: Với số α∈ cố định, hàm lũy thừa phức zα được cho bởi công thức
Ln zz eα α= .
Nhánh chính của hàm này là ln zz eα α= . Nó là hàm hợp của những hàm khả vi cho nên cũng khả vi và có đạo hàm là
1( ) 'z zα αα −= .
Hàm lũy thừa phức có những tính chất tương tự như hàm lũy thừa thực, đặc biệt là:
.z z zα β α β+= .
d) Các hàm lượng giác:
Các hàm lượng giác được định nghĩa như sau
1cos( ) ( )2
iz izz e e−= + , 1sin( ) ( )2
iz izz e ei−= − .
Theo định lý hàm hợp, các hàm lượng giác trên là khả vi và
[cos( )]' sin( )z z=− , [sin( )]' cos( )z z= .
Từ hai hàm lượng giác cơ bản này, ta có thể định nghĩa các hàm lượng giác khác như tan(z), cot(z), sh(z), ch(z), ... và cả những hàm lượng giác ngược như arcsin(z), arccos(z), ... như trong trường hợp hàm ngược thực.
Chú ý. Hàm sin và cos trên tập số thực luôn bị chặn bởi -1 và 1, nhưng trên tập số phức chúng không bị chặn.
Thí dụ
1) 1cos( ) ( ) ch( )2x xix e e x−= + = ;
1sin( ) ( ) sh( )2
x xix e e i xi−= + = .
2) Tìm số phức z sao cho cos( ) 3z = .
Giải. Giả sử z x iy= + . Điều kiện cos( ) 3z = kéo theo
124 Giải tích các hàm nhiều biến
3 cos( ) cos( )cos( ) sin( )sin( )x iy x iy x iy= + = − = cos( )ch( ) sin( )sh( )x y i x y− .
Nghĩa là
sin( ).sh( ) 0x y = .
Suy ra x kπ= hoặc 0y= , và cos( )ch( ) 3x y = .
Nếu 0y= thì cos( ) 3x = , điều này không thể xảy ra.
Như vậy 0y ≠ và x kπ= . Khi ấy ch( ) 3y = .
Vậy Argch(3)y= và Argch(3)z k iπ= + với k là số nguyên bất kỳ.




















![[Revit] Lấy tọa độ cho file Revit link](https://img.pdfslide.tips/doc/110x75/587287841a28abc7068b76d5/revit-lay-toa-do-cho-file-revit-link.jpg)