9
III. TEORI DASAR
3.1 Hukum NewtonDasar dari metode gayaberat adalah hukum Newton
tentang gayaberat dan teori medan potensial. Newton menjelaskan
bahwa besar gaya tarik menarik antara dua buah partikel yang
mempunyai massa m1 dan m2 dengan jarak antara dua titik pusat
partikel tersebut r terlihat pada Gambar 5 (Grant dan West, 1965).
(1)dimana: = Gaya antara benda m1 dan m2 G = Konstanta Gayaberat
(6,672 x 10-11 m3kg-1s-2) r = Jarak antara m1 dan m2
rM2M1
Gambar 5. Gaya tarik menarik antara dua bendaMelalui persamaan
(1) dapat diketahui besarnya medan gayaberat di m2, yaitu dengan
membagi F dengan m2, dapat dinyatakan sebagai berikut. (2) 3.2
Potensial GayaberatSuatu massa yang terdapat dalam sistem ruang
tertentu akan menimbulkan medan potensial di sekitarnya. Medan
potensial untuk gayaberat bersifat konservatif, artinya usaha yang
dilakukan dalam suatu medan gayaberat tidak tergantung pada
lintasan yang ditempuhnya, tetapi tergantung pada posisi awal dan
akhir dan memenuhi persamaan berikut. (3)dimana: U = potensial
scalar = gayaberat (vector)Gaya yang timbul dapat diturunkan dari
suatu fungsi potensial scalar U (x,y,z) berikut.(4)Kemudian ditulis
dalam kordinat bola menjadi: (5)(6)Dengan mensubtitusikan , maka
persamaan dalam bentuk scalar menjadi: (7)Apabila suatu massa tiga
dimensi bentuk sembarang terdistribusi secara kontinyu dengan rapat
massa (,,), maka potensial gravitasi di titik P (x,y,z) di atas dan
di luar distribusi rapat massa tersebut diberikan oleh (Kadir,
1997) sebagai berikut.(8)Komponen gravitasi vertikal akibat
distribusi rapat massa di atas diperoleh dengan mendiferensialkan
persamaan terhadap z. (9) (10)Dimana g adalah anomali gayaberat
yang diamati, adalah kontras densitas, G adalah konstanta gravitasi
umum, (x,y,z) dan (,,) masing-masing adalah sisitem koordinat
stasiun dan sumber benda. Dari persamaan 4 tampak bahwa percepatan
gravitasi bervariasi dan hanya bergantung pada distribusi massa di
bawah permukaan. Gayaberat yang diukur di permukaan adalah
merefleksikan besar tarikan benda anomali bawah permukaan dengan
arah pusat bumi dan merupakan turunan dari gaya sesuai dengan hukum
Newton.
3.3 Pengukuran Gayaberat3.3.1 Pengukuran AbsolutPengukuran
absolut dilakukan di labolatorium, sukar untuk mendapatkan harga
bayaberat absolut yang akurat, karena banyaknya kendala yang sangat
mempengaruhi hasil pengukuran (Sarkowi, 2009). Oleh karena itu
pengukuran absolut ini jarang sekali digunakan karena terlalu sukar
dan melibatkan banyak faktor dan alat. Cara pengukuran absolut ini
menggunakan pendulum, jatuh bebas, dan gravimeter.
3.3.2 Pengukuran RelatifPengukuran relatif pada data gayaberat
adalah dengan membandingkan hasil pengukuran titik yang tidak
diketahui nilai gayaberatnya dengan titik yang sudah diketahui
nilai dan telah diikat kepada titik referensialnya, misal Postdam,
IGSN, dan lain sebagainya.
3.3.3 Alat - Alat Pengukur Percepatan Gayaberata.
Pendulum(11)Ketelitian alat pendulum maksimum hanya 0.1mgalb.
Pengukuran Gayaberat Benda Jatuh (12) Karena V0 = 0 maka:
(13)Ketelitian pengukuran mencapai 10-7 gal.c. Pengukuran Relatif
Menggunakan GravimeterGravimeter adalah alat pengukur Gaya berat
relatif yang prinsip kerjanya didasarkan atas memanjangnya pegas
akibat perbedaan gaya tarik yang berlaku pada beban, bila sebuah
Gravimeter dibawa kedua tempat yang berbeda harga gaya beratnya,
pergeseran tersebut dibaca pada mistar sekala. Ada dua macam alat
gravimeter yaitu tipe stabil dan unstabil,tipe yang unstabil saat
ini lebih banyak digunakan karena tinggi harga ketelitian dan
akurasinya,contoh dari tipe ini adalah Worden, Scintrex Autograv
dan Lacoste Romberg Gravimeter.
3.3.4 Pengukuran di LapanganPengukuran di lapangan membentuk
suatu loop yang akan mulai dan berakhir di titik yang sama. Yang
pertama dilakukan adalah mencari lokasi yang tepat untuk peletakan
stasiun pertama, sebagai titik ikat untuk dibandingkan dengan hasil
pengukuran di tiitk lain. Kecermatan pengukuran sangat ditentukan
oleh data pengukuran topografi setiap stasiun.
3.4 Koreksi Data GayaberatHarga gayaberat observasi hasil survei
gayaberat akan berbeda satu tempat dengan yang lain disebabkan
oleh:1. Pemampatan dan rotasi bumi2. Perbedaan jarak dari pusat
bumi3. Perbedaan ketinggian maupun kedalaman di setiap titik
pengukuran terhadap bidang datum (Mean Sea Level)4. Adanya efek
tarikan massa antara bidang datum dan stasiun pengukuran5. Efek
topografi permukaan yang relatif kasar dengan perbedaan elevasi
yang besar.Untuk menghilangkan perbedaan pembacaan harga g, maka
harus dilakukan koreksi gayaberat, koreksi-koreksi tersebut adalah
sebagai berikut:3.4.1 Koreksi Tidal
Gambar 6. Pengaruh gravitasi bulan di titik P (Kadir,
2000).Koreksi Pasang Surut (Tidal Correction) adalah untuk
menghilangkan gaya tarik yang dialami bumi akibat bulan dan
matahari, sehingga di permukaan bumi akan mengalami gaya tarik naik
turun. Hal ini akan menyebabkan perubahan nilai medan gravitasi di
permukaan bumi secara periodik. Koreksi pasang surut juga
tergantung dari kedudukan bulan dan matahari terhadap bumi. Koreksi
tersebut dihitung berdasarkan perumusan (Longman, 1959) dan
diperlihatkan oleh Gambar 6. `(14)dimana: c = jarak rata-rata ke
bulan. R = Jarak pusat bumi ke pusat bulan.r = jari-jari bumi.G =
Konstanta gayaberat.3.4.2 Koreksi Drift (apungan)Koreksi ini
dilakukan untuk menghilangkan pengaruh perubahan kondisi alat
(gravity meter) terhadap nilai pembacaan. Koreksi apungan muncul
karena gravimeter selama digunakan untuk melakukan pengukuran akan
mengalami goncangan, sehingga akan menyebabkan bergesernya
pembacaan titik nol pada alat tersebut. Koreksi ini dilakukan
dengan cara melakukan pengukuran dengan metode looping, yaitu
dengan pembacaan ulang pada titik ikat (base station) dalam satu
kali looping, sehingga nilai penyimpangannya diketahui. Pada Gambar
berikut memperlihatkan perhitungan gayaberat di satu titik
pengukuran dalam waktu yang berbeda disertai rumus 15 untuk
menghitung nilai gayaberat pada titik tersebut.
Harga Gayaberat di base station 8.10 12.4016.35 Waktu (jam)Drift
pd12.40Drift pd16.35mGalGambar 7. Perhitungan drift nilai gayaberat
observasi (Sarkowi, 2009).(15)dimana: gakhir = nilai gayaberat pada
pengukuran terakhir g0 = nilai gayaberat pada pengukuran pertama t
akhir = waktu pengukuran terakhir tn = waktu pada pengukuran ke-n
t0 = waktu pada pengukuran pertama
3.4.2 Koreksi LintangBentuk bumi tidaklah bulat sempurna
melainkanbentuk sferoid dan pepat di kedua kutubnya, sehingga
besarnya harga gayaberat dikutub dan khatulistiwa tidaklah sama
diperlihatkan oleh Gambar 8. Untuk itu diperlukan adanya koreksi
Lintang dengan rumusan (Blakely, 1995) sebagai berikut. (16)
Gambar 8. Pengaruh Lintang terhadap Nilai Gayaberat.
3.4.4 Koreksi Udara BebasKoreksi udara bebas merupakan koreksi
akibat perbedaan ketinggian sebesar h dengan mengabaikan adanya
massa yang terletak diantara titik amat dengan sferoid referensi.
Koreksi ini dilakukan untuk mendapatkan anomali medan gayaberat di
topografi. Untuk mendapat anomali medan gayaberat di topografi maka
medan gayaberat teoritis dan medan gayaberat observasi harus
sama-sama berada di topografi, sehingga koreksi ini perlu
dilakukan. Nilai gayaberat pada muka air laut dengan menganggap
bentuk bumi yang ideal spheroid, tidak berotasi dan massa
terkonsentrasi ke pusat adalah: (17)Dimana g0 adalah gayaberat bumi
dengan bentuk spheroid, r adalah jari-jari bumi.
Menurut (Kadir, 2000), nilai gayaberat pada suatu titik
pengukuran berada pada elevasi h meter diatas muka air laut adalah:
(18)Selisih nilai gayaberat pada muka air laut dan pada ketinggian
h meter disebut koreksi udara bebas, diberikan oleh perumusan
(Telford, 1990) berikut. Dimana diketahui bahwa nilai g0 = 9817855
mgal, r = 6.371.000 meter. Maka besarnya koreksi udara bebas adalah
sebagai berikut. (19)
Gambar 9. Penampang topografi titik pengukuran (Keary dkk,
2002).3.4.5 Koreksi BouguerKoreksi Bouguer merupakan koreksi yang
dilakukan untuk menghilangkan perbedaan ketinggian dengan tidak
mengabaikan massa di bawahnya. Perbedaan ketinggian tersebut akan
mengakibatkan adanya pengaruh massa di bawah permukaan yang
mempengaruhi besarnya percepatan gayaberat di titik amat.
Untuk menjabarkan koreksi Bouguer, ditinjau dengan sebuah
silinder dengan jari-jari r dan tinggi h seperti gambar 10
berikut.Pertama, dicari nilai g pada sumbu sebuah piringan setebal
dl, dengan memperhatikan sebuah elemen cincin setebal dr. Massa
dari cincin adalah: (20)Dengan adalah rapat massa silinder.
Sehingga efek gayaberat diberikan oleh: (21)Untuk menghitung efek
total piringan, dapat diperoleh dengan pengintegralan dari 0 sampai
arctan (r/h), sehingga diperoleh : (22)Dengan mengintegralkan
terhadap l dan z sampai z+l, akan diperoleh efek untuk seluruh
silinder: (23) (24)Bila r = , akan diperoleh : .Apabila diketahui
nilai G = 6,672 x 10-11 m3kg-1s-2, = densitas batuan, h =
ketinggian terhadap titik datum (h=L), maka nilai koreksi Bouguer
diberikan oleh (Reynolds, 1997).KB = 2Gh = 0,04185 h
(mgal/m)(25)
Bidang datumdrdllgrhGambar 10. Perhitungan Koreksi Bouguer
(Telford , 1990).
3.4.6 Koreksi Medan
Gambar 11. Efek topografi dalam komponen arah vertikal (Sarkowi,
2009).Koreksi medan digunakan untuk menghilangkan pengaruh efek
massa disekitar titik observasi. Adanya bukit dan lembah disekitar
titik amat akan mengurangi besarnya medan gayaberat yang
sebenarnya. Karena efek tersebut sifatnya mengurangi medan
gayaberat yang sebenarnya di titik amat maka koreksi medan harus
ditambahkan terhadap nilai medan gayaberat. Salah satu cara untuk
mengetahui nilai koreksi medan adalah dengan menggunakan Hammer
Chart (Gambar 12).
Gambar 12. (a)Hammer Chart, (b)Cincin silinder yang terbagi 8
segmen (Reynolds, 1997).
Secara matematis koreksi tersebut dapat dituliskan dengan
pendekatan cincin silinder dapat dilihat pada Gambar 12 sebagai
berikut: (21)dengan: G = Konstanta gaya berat (6,673 x 10-8 dyne
cm2gr-2).rL dan rD = radius luar dan radius dalam kompartemen.z =
perbedaan elevasi rata-rata kompartemenn = jumlah segmen dalam zona
tersebut = densitas batuan rata-rata.
3.4.7 Anomali BouguerSetelah dilakukan koreksi terhadap data
gayaberat, maka diperoleh anomali gayaberat, sebagai berikut
(Blakely, 1995):(22)dimana:gABL = Anomali Bouguer LengkapGobs=
Gayaberat Observasig= Koreksi LintangKUB= Koreksi Udara BebasKB=
Koreksi BouguerKM= Koreksi Medan
3.5 Estimasi Rapat MassaRapat massa batuan merupakan besaran
fisik yang sangat penting dalam metode gayaberat. Pada perhitungan
anomali Bouguer diperlukan harga rapat massa rata-rata didaerah
survey. Untuk itu nilai densitas rata-rata di daerah tersebut harus
ditentukan dengan baik. Ada beberapa cara yang dapat digunakan
untuk menentukan rapat massa rata-rata, yaitu:1. Metoda Nettleton2.
Metoda Parasnis3.5.1 Metoda NettletonMetoda Nettleton adalah
korelasi antara elevasi dan nilai gayaberat observasi diperlihatkan
oleh Gambar 13 berikut.
profil terbaik = 1,8Anomali BouguertopografiGambar 13. Estimasi
rapat massa dengan metode Nettleton (Telford, 1990).Metoda ini
didasarkan pada pengertian tentang koreksi Bouguer dan koreksi
Medan dimana jika rapat massa yang digunakan sesuai dengan rapat
massa permukaan, maka penampang atau profil anomali gayaberat
menjadi smooth.
Dalam aplikasi, penampang dipilih melalui daerah topografi kasar
dan tidak ada anomali gayaberat target. Secara kuantitatif,
estimasi rapat massa permukaan terbaik dapat diitentukan dengan
menerapkan korelasi silang antara perubahan elevasi terhadap suatu
referensi tertentu dengan anomali gayaberatnya. Sehingga rapat
massa terbaik diberikan oleh harga korelasi silang terkecil sesuai
dengan persamaan sebagai berikut. Dengan N adalah jumlah stasiun
pada penampang tersebut.(23)3.5.2 Metoda ParasnisEstimasi rapat
massa metoda ini diturunkan dari anomali gayaberat dituliskan
sebagai berikut.(24)Dimana suku terakhir bagian kanan adalah
koreksi medan dengan c nilai koreksi medan sebelum dikalikan dengan
rapat massa. Dari persamaan tersebut didapat:(25)Atau (26)Dari
persamaan tersebut, maka rapat massa dapat diperoleh dari gradient
garis-garis lurus terbaik. Dimana ABL diasumsikan sebagai
penyimpangan terhadap garis lurus tersebut (Sarkowi, 2009).Gambar
14. Grafik yang menunjukkan hubungan antara dan .
3.6 Pemisahan Anomali Regional dan ResidualSebelum melakukan
pemisahan anomali regional dan residual, perlu dilakukan proses
analisis spektrum yaitu suatu proses untuk mendapatkan estimasi
kedalaman suatu anomali gayaberat dan menentukan lebar jendela yang
dianggap sebagai filter yang paling baik untuk digunakan dalam
pemisahan anomali regional dan residual. Penjelasan lengkapnya
dibahas pada sub-bab berikut.
3.6.1 Analisa SpektrumAnalisa spektrum dilakukan untuk
mengestimasi lebar jendela dan kedalaman dari anomali gayaberat.
Analisa spektrum dilakukan dengan mens-transformasi fourier
lintasan-lintasan yang telah ditentukan.Transformasi Fourier
anomali gayaberat pada bidang horizontal diberikan oleh: (27)(28)
(29) (30)dimana:gz = anomali gayaberatk = bilangan gelombangG =
konstanta gayaberat = rapat massa batuanz0 = ketinggian titik amat
z= kedalaman benda anomaliUntuk menghasilkan estimasi yang optimal
adalah dengan cara melogaritmakan spektrum amplitudo dari
transformasi Fourier sehingga memberikan persamaan garis lurus
(komponen k dan spektrum amplitudo). Untuk hasil dari tranformasi
Fourier akan diperoleh bilangan riil dan imajiner,
bilangan-bilangan inilah yang akan menghasilkan ln A melalui
persamaan berikut.(31)r merupakan bilangan real, i merupakan
bilangan imajiner dan A adalah amplitudo. Melalui regresi linier
diperoleh batas antara orde satu dan dua sehingga nilai k dijadikan
penentu lebar jendela.Hubungan (panjang gelombang) dengan k
diperoleh dari persamaan berikut (Blakely, 1995).(32)(33)n adalah
lebar jendela. Untuk estimasi kedalaman diperoleh dari gradien
persamaan garis lurus berikut.
Gambar 15. Kurva Ln A dan k.3.6.2 FilteringSalah satu cara untuk
memisahkan anomali regional dan anomali residual adalah dengan
metode Moving Average, metode ini dilakukan dengan cara
merata-ratakan nilai anomalinya. Hasil dari perata-rataan ini
merupakan anomali regionalnya. Sedangkan anomali residualnya
didapatkan dengan mengurangkan data hasil pengukuran gravitasi
dengan anomali regionalnya. Secara matematis persamaan moving
average untuk 1 dimensi adalah sebagai berikut. (34)dimana , dan N
harus bilangan ganjil. Setelah didapatkan , maka harga dapat
dihitung dengan menggunakan persamaan berikut.
(35)dimana: = besarnya anomali residual = besarnya anomali
bouguer = besarnya anomali residual Persamaan 34 merupakan dasar
dari metode ini, dari persamaan tersebut akan dapat dihitung nilai
anomali regional pada sebuah titik penelitian. Dimana nilai anomali
regional pada sebuah titik penelitian, sangat tergantung pada nilai
anomali yang terdapat di sekitar titik penelitian. Sehingga nilai
anomali regional pada sebuah titik merupakan hasil rata-rata dari
nilai anomali-anomali di sekitar daerah penelitian (Purnomo dkk.,
2013).
3.7 Second Vertical DerivativeMetode second vertical derivative
dapat digunakan untuk membantu interpretasi struktur dan jenis
struktur tersebut dari data anomali residual yang diakibatkan oleh
adanya struktur sesar turun atau sesar naik. Metode ini bersifat
high pass filter, sehingga dapat menggambarkan anomali residual
yang berasosiasi dengn struktur dangkal yang dapat digunakan untuk
mengidentifikasi jenis patahan. Formula dasar diturunkan dari
persamaan Laplace untuk anomali gayaberat di permukaan,
yaitu:(36)Selanjutnya, untuk suatu penampang (2-D), anomali second
vertical derivative diberikan oleh (Darby dkk, 1967): (37)Untuk
menentukan jenis struktur patahan suatu daerah menggunakan
perumusan berikut (Reynolds, 1997): untuk sesar turun(38)untuk
sesar naik(39)3.8 Pemodelan Tiga Dimensi (3D)Pada penelitian ini
pemodelan data anomali Bouguer dilakukan dengan metode inversi
menggunakan perangkat lunak Grav3D versi 2.0, dengan model benda
didekati dengan benda berbentuk susunan prisma tegak dengan spasi x
dan y. Dari susunan prisma tersebut selanjutnya dilakukan
perhitungan respon gayaberatnya. Untuk menghitung respon
gayaberatnya digunakan metode perumusan yang dilakukan oleh Plouff
(1976): (40)dimana: (41) (42)Untuk mendapatkan pola struktur bawah
permukaan dari data gayaberat, maka anomali Bouguer hasil
perngukuran dan perhitungan harus dilakukan pemodelan baik dengan
metode foward modelling atau inversion modelling sehingga akan
diketahui distribusi densitas dan struktur di daerah penelitian.
Selanjutnya berdasarkan distribusi densitas tersebut dilakukan
interpretasi dengan menggabungkan data-data geologi yang ada
didaerah tersebut sehingga akan diperoleh struktur bawah permukaan
di daerah tersebut.
3.9 Sistem PerminyakanSistem perminyakan merupakan seluruh
elemen dan proses pada suatu cekungan sedimen yang dibutuhkan untuk
terakumulasinya hidrokarbon.
3.9.1 Batuan Induk Batuan induk adalah batuan sedimen yang
berukuran butir halus (biasanya serpih) berwarna gelap, kaya akan
zat organik diendapkan dalam lingkungan darat maupun laut
(Koesoemadinata, 1980).
3.9.2 Batuan Reservoir Batuan reservoir adalah batuan yang
berpori yang dapat mengandung hidrokarbon. Ruang penyimpanan
hidrokarbon dalam batuan reservoir berupa rongga-rongga atau pori
yang terdapat di antara butiran mineral atau di dalam rekahan
batuan. Setiap batuan dapat bertindak sebagai batuan reservoir asal
mempunyai kemampuan untuk dapat menyimpan dan melepaskan
hidrokarbon, maka untuk itu batuan reservoir harus mempunyai
porositas yang memberikan kemampuan untuk menyimpan (porositas) dan
meluluskan (permeabilitas) fluida (Koesoemadinata, 1980).
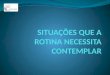
3.9.3 MigrasiGambar 16. Migrasi (Iffredista, 2012).
Migrasi adalah proses bergeraknya tetes-tetes minyak dan gas
bumi dari batuan induk kedalam batuan reservoir (Koesoemadinata,
1980). Proses migrasi berawal dari migrasi primer (primary
migration), yakni transportasi dari source rock ke reservoir secara
langsung. Lalu diikuti oleh migrasi sekunder (secondary migration),
yakni migrasi dalam batuan reservoir nya itu sendiri (dari
reservoir bagian dalam ke reservoir bagian dangkal).
Proses migrasi hidrokarbon berdasarkan pada prinsip tekanan
fluida, dimana fluida mengalir dari daerah dengan tekanan tinggi
menuju daerah dengan tekanan rendah (Rizka dkk., 2011). Prinsip
dasar identifikasi jalur-jalur migrasi hidrokarbon adalah dengan
membuat peta reservoir. Kebalikannya dari air sungai di permukaan
bumi, hidrokarbon akan melewati punggungan (bukit-bukit) dari
morfologi reservoir. Daerah yang teraliri hidrokarbon disebut
dengan drainage area (Analogi Daerah Aliran Sungai di permukan
bumi). Jika perangkap tersebut telah terisi penuh (fill to spill)
sampai spill point, maka hidrokarbon tersebut akan tumpah (spill)
ke tempat yang lebih dangkal. Beberapa parameter yang dapat
digunakan untuk membantu prediksi jalur migrasi, antara
lain:a.Hidrokarbon bermigrasi ke arahup-dipkecuali ada tekanan
ekstrim yang menghalanginya.b.Hidrokarbon bermigrasi secara lateral
dan vertikal tergantung pada kondisi geologi yang dipengaruhi oleh
konfigurasi struktur dan stratigrafi.c.Hidrokarbon cenderung
bermigrasi dengan jalur yang terpendek.
3.9.4 Perangkap Hidrokarbon 1. Perangkap Struktur Perangkap
struktur merupakan perangkap yang paling umum dijumpai dalam
pemerangkapan hidrokarbon. Terbentuknya perangkap struktur
dikendalikan oleh aktivitas tektonik atau struktur, misalnya
perlipatan dan pensesaran (Koesoemadinata, 1980).
2. Perangkap Lipatan Perangkap yang disebabkan perlipatan ini
merupakan perangkap yang pertama kali dikenal dalam perusahaan
minyak dan gas bumi. Unsur yang mempengaruhi pembentukan perangkap
ini ialah lapisan penyekat dan penutup yang berada di atasnya dan
dibentuk sedemikian rupa sehingga minyak tidak bisa lari ke mana
mana (Koesoemadinata, 1980).
3. Perangkap Sesar Sesar dapat juga bertindak sebagai penyekat
minyak dalam penyaluran pergerakan minyak dan gas. Ada beberapa
unsur yang harus dipenuhi untuk terjadinya suatu perangkap yang
hanya disebabkan karena sesar: 1. Adanya kemiringan lapisan
sehingga minyak dan gas akan 2. terakumulasi dan terperangkap oleh
sesar 3. Harus ada paling sedikit 2 patahan yang berpotongan. 4.
Kombinasi dengan struktur lipatan. 5. Pelengkungan patahannya
sendiri dan kemiringan lapisan. 3.9.5 Batuan Penutup Batuan penutup
umumnya batuan sedimen yang berukuran halus (biasanya serpih atau
batulempung) yang memiliki porositas dan permeabilitas yang sangat
kecil. Fungsi dari batuan penutup ini adalah sebagai penyekat
supaya minyak atau gas bumi tidak dapat bergerak kemanamana lagi.
Selain itu sistem penyekatan hidrokarbon dapat berupa bidang sesar
apabila memiliki ruangan rekahan yang kecil dan terisi oleh
material halus atau kedap sehingga hidrokarbon tersebut tidak dapat
berpindah lagi (Koesoemadinata, 1980).6