Embed Size (px)
Citation preview

1er CONGRESO ESTATAL DE ROBÓTICA 27-28 de noviembre de 2014
INCREMENTO DE LOS CANALES ANALÓGICOS DE VOLTAJE DE BAJA
FRECUENCIA EN UN SISTEMA INDUSTRIAL SIN MODIFICACIÓN
DEL CABLEADO DE PLANTA
Rodríguez-Olivares N.A., Maganda-Carvajal J.A., Lugo-Pérez J.G., Herrera J. M., Leal E. y Morelos
J.M.
Universidad Tecnológica de Querétaro, Av. Pie de la Cuesta 2501, Unidad Nacional, 76148 Querétaro,
Qro., México
{noeamir}@gmail.com, {jaime.maganda,glugo}@uteq.edu.mx,
{maury.zea85,enriqueleal6,jmmoreloslopez}@gmail.com
Resumen
Este trabajo presenta el desarrollo de un sistema electrónico para enviar 3 señales analógicas de voltaje de
baja frecuencia en un 1 sólo hilo. El principio de operación del sistema se basa en la división de frecuencia y
la aplicación de los filtros pasa bajas, pasa bandas y pasa altas de tipo activo de primer y segundo orden.
Este sistema industrial permite incrementar los canales analógicos de un sistema de control industrial ya
instalado sin tener que ampliar o modificar el cableado ya utilizado. El diseño de esta aplicación se
desarrolla por análisis de bode en Matlab®, y se realizan pruebas experimentales en laboratorio, aplicando
ajuste de regresión mediante Minitab®. Este desarrollo industrial es útil en procesos industriales dónde
aumentar el cableado resulta complejo, así como en ampliaciones de sistemas instrumentados, como lo son
los robots, dónde el cableado de más sensores en ocasiones resulta demasiado complejo por el espacio que
se tiene para maniobrar.
Palabras clave: Señal analógica, Filtro activo.
ABSTRACT
This work presents the development of an electronic system to send 3 analog voltage signals of low
frequency in 1 wire only. The operating principle of the system is based on frequency division and applying
low pass filters, band pass and pass band. The filters are active type of first and second order. This industrial
system allows increasing the analog channels of industrial control system already installed without having to
extend or modify the wiring and used. The design for this application is developed by Bode analysis in
Matlab®, and experimental laboratory tests performed by applying the regression fit using Minitab®. This
industrial development is useful in industrial processes where increasing the wiring is complex, as well as
extensions of instrumented systems, such as robots, where more sensors wiring is sometimes too complex
for the space you have to maneuver.
KEYWORDS: Analog signal, Active filter.

1er CONGRESO ESTATAL DE ROBÓTICA 27-28 de noviembre de 2014
1. INTRODUCCIÓN
En un sistema de comunicación de datos industrial, tres características son importantes para determinar la
aplicación de las redes de comunicación entre los elementos, estas características son el volumen de datos,
la velocidad de transmisión y la velocidad de respuesta [6]. La pirámide de las comunicaciones determina los
cuatro niveles de comunicación existentes para las redes de datos, algunas de las redes más importantes
son Ethernet [14] a nivel de oficina, Profinet [18] a nivel de planta, Profibus [19] a nivel de célula y AS-I [7] a
nivel de campo; se considera campo, al área de producción o fabricación, dónde se localizan las máquinas y
transmisores, junto con sus sensores y actuadores [21].
El uso de señales analógicas de voltaje es muy común en procesos industriales a nivel de campo, los valores
más utilizados de voltaje positivo son de 0 a +5V, de +1 a +5V o de 0 a +10V y rangos que consideran valores
negativos como por ejemplo de -5 a +5V, y de -10 a 10V [10]. Para el envío de señales análogas de voltaje
emitidas de un sensor, comúnmente se utiliza un cable blindado [20] que actúa como jaula de Faraday
aislando electromagnéticamente a las señales internas del conductor a lo largo de toda su longitud. Los
cables blindados se utilizan predominantemente en aplicaciones relativamente de alta velocidad [1], sin
embargo, este tipo de cable tiene un costo relativamente alto y en un proceso o sistema industrial ya
instalado, el realizar una ampliación de la cantidad de sensores resulta en un trabajo complejo y costoso.
Algunas soluciones al problema de la ampliación de sensores en un sistema ya instalado se han desarrollado
mediante buses de campo, como el bus CAN [8], SDS [13] y AS-I [4], estos buses a pesar de ser soluciones de
gran flexibilidad para dispositivos simples; funcionando en aplicaciones de tiempo real y agrupando los
datos en una zona de una planta; comprenden capas físicas y de enlace del modelo OSI [12], por lo cual,
requieren de señales físicas y patrones de bits para las tramas de datos [7]. Una solución práctica es la
multiplexación de señales, muy utilizada en sistemas de telefonía y radiodifusión [2] [15], las tres técnicas
básicas de multiplexado son: por división de frecuencia (FDM) [9], por división de longitud de onda (WDM)
[22] y por división de tiempo (TDM) [17]. La técnica más usada en el multiplexado de señales, es por división
de frecuencia, sin embargo, las aplicaciones desarrolladas en esta técnica se han dirigido a utilizar la fibra
óptica como método de transmisión [5]. El resto de este trabajo se encuentra organizado de la siguiente
manera. En la sección 2 se presenta el diseño del sistema electrónico y las consideraciones técnicas para su
implementación, en la sección 3 se muestran los circuitos implementados y las pruebas realizadas en
laboratorio, en la sección 4 se presenta la discusión de los resultados y finalmente, se presentan las
conclusiones de este trabajo.

1er CONGRESO ESTATAL DE ROBÓTICA 27-28 de noviembre de 2014
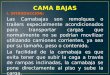
Figura 1. Ampliación del número de sensores análogos en el mismo campo.
2. DISEÑO DEL SISTEMA ELECTRÓNICO
A pesar de no presentar excelente respuesta para frecuencias altas, el cable blindado puede trabajar en el
rango de los KHz; siendo este rango de frecuencias el campo de aplicación de los filtros activos [11], los
cuales se componen de resistencias, capacitores y amplificadores operacionales. La principal ventaja de los
filtros activos es que permiten tener ganancia en potencia, y son relativamente fáciles de sintonizar. La
Figura 1 muestra el problema que se alcanza a resolver con la aplicación desarrollada en este trabajo, los
convertidores analógico digital (ADC) pueden corresponder a entradas análogas de un controlador lógico
programable (PLC), o cualquier sistema de control con entradas analógicas; los 3 sensores pueden enviar
señales de 0 a 10V, el Emisor basado en Filtros Activos (FAE) cuenta con 3 entradas y una salida dónde se
multiplexan por división de frecuencia (FDM) las tres señales de los sensores mediante la técnica de
amplitud modulada (AM); el Receptor basado en Filtros Activos (FAR) cuenta con 1 entrada y 3 salidas,
dónde se demultiplexan las señales de los sensores.
2.1 Diseño del emisor
En la Figura 2 se muestra como se compone el emisor (FAE), que multiplexa tres señales analógicas,
provenientes de 3 sensores con emisión de voltaje positivo de 0 hasta 10V, que son ajustados en amplitud
por un coeficiente K1 de 1/3. La señal del sensor 1 se pasa directamente después del ajuste de amplitud; la
señal del sensor 2 es enviada por una frecuencia moduladora f1 de 2 KHz y la señal del sensor 3 es
modulada por una frecuencia f2 de 15 KHz. Las 3 señales son sumadas dando como resultado una sola
señal portadora, que es enviada por el cable blindado.

1er CONGRESO ESTATAL DE ROBÓTICA 27-28 de noviembre de 2014
Figura 2. Generación de la señal portadora.
Figura 3. Demultiplexación de señales y ajuste de amplitud.
2.2 Diseño del receptor
La Figura 3 presenta el demulltiplexor desarrollado; la primera señal se recupera mediante un filtro pasa
bajas, con el cual se separa la señal del sensor 1 de la señal portadora, posteriormente, pasa por un circuito
que obtiene el valor medio absoluto de la señal (MAV). La señal del sensor 2 se obtiene de implementar un
filtro pasa banda, y la señal del sensor 3 es obtenida mediante un filtro pasa altas; las dos señales también
pasan por un circuito MAV y una ganancia constante que permite recuperar la amplitud de 0 a 10V de la
señal.
Para el diseño de la etapa de filtrado, se considera que las señales de los sensores llegarán a un convertidor
analógico digital (ADC) de 8 bits, con un rango máximo de 10V. Se toma como error máximo permitido el
valor de +/- 1 bit, el error permitido se puede calcular mediante la siguiente fórmula.
(1)

1er CONGRESO ESTATAL DE ROBÓTICA 27-28 de noviembre de 2014
Figura 4. Respuesta del filtro pasa bajas para distinto orden
Dónde err es el error permitido, que es equivalente a la resolución del ADC de n bits, Verf+ consiste en el
valor máximo que puede tomar la señal de los sensores, y Vref- al valor mínimo de las señales.
Considerando el rango máximo de los 10V, y los 8 bits, el error máximo es de 0.039 Volts, equivalente a 1 bit
de 255.
2.2.1 Diseño del filtro pasa bajas
Para el sensor 1, se considera como rango de frecuencias un máximo de 20 Hz. De esta manera, es
necesario calcular la frecuencia de corte que permita tener un error menor a 0.039 Volts para los 20 Hz. La
frecuencia de corte Wc se puede calcular mediante el uso de las asíntotas de aproximación [16]:
√
(2)
Dónde, w es la frecuencia de la señal que se desea obtener, de 125 rad/s, equivalente a los 20 Hz, K es la
magnitud de la amplitud de la señal normalizada de 0 a 1, dónde 1 equivale al 100% de la señal; tomando K
un valor de 0.9960 debido al voltaje de error de 0.039 Volts, equivalente a una caída de 0.034 dB y Wc es la
frecuencia de corte del filtro en rad/s. Aplicando la ecuación 2, se obtiene como frecuencia de corte 223 Hz.
El tipo de filtro a implementar es de tipo Butterworth, ya que produce la respuesta más plana posible hasta
la frecuencia de corte. Teniendo una caída de 20n dB por década, dónde n corresponde al orden del filtro.
La Figura 4 muestra el diagrama de Bode para filtros pasa bajas de distinto orden, con un filtro pasa bajas
de orden 3, se tiene una caída de 57.2 dB, lo que equivale a 1 milésima de la amplitud de la frecuencia de la
señal del sensor 2. Así que con un filtro de orden 3 se considera suficiente para la eliminación de las señales
2 y 3.

1er CONGRESO ESTATAL DE ROBÓTICA 27-28 de noviembre de 2014
Figura 5. Filtro de banda estrecha sintonizable, con ancho de banda constante [11].
2.2.2 Diseño del filtro pasa banda
El filtro pasa bandas utilizado es un filtro de banda estrecha, con una ganancia de tensión de valor unidad,
este circuito permite variar la frecuencia central para encontrar la señal deseada, mientras se mantiene
constante el ancho de banda [11], mostrado en la Figura 5. Para el cálculo del filtro, solamente es necesario
determinar el ancho de banda deseado BW, expresado en la ecuación 3. Se propone un ancho de banda de
160 Hz para permitir encontrar con facilidad la señal de 2 KHz.
(3)
Figura 6. Diagrama de bode de filtro pasa altas de orden 3.

1er CONGRESO ESTATAL DE ROBÓTICA 27-28 de noviembre de 2014
Figura 7. Circuito para el cálculo del valor medio absoluto [3].
2.2.3 Diseño del filtro pasa altas
Para el diseño del filtro pasa altas se utilizan criterios similares a los del filtro pasa bajas. La Figura 6 muestra
la respuesta en magnitud del filtro pasa altas de tercer orden del tipo Butterworth. Se aprecia en la figura 6
que la magnitud de la señal de 15 KHz, solo pierde 0.0327 dB, un valor por debajo de los 0.034 dB
planteados originalmente. La frecuencia de corte para obtener este valor es de 750 Hz.
2.2.4 Diseño del circuito para el valor medio absoluto
Para recuperar la señal de cada sensor, una vez pasada la señal por los filtros, se calcula el valor promedio
de cada señal rectificada. La figura 7 muestra el circuito que permite calcular el valor medio absoluto. Para
las ondas cuadradas de amplitud modulada y referencia en 0V [3], el MAV permite obtener la amplitud
media, actuando como una segunda etapa de filtrado.
3. SIMULACIÓN Y RESULTADOS
Las pruebas se dividieron de manera que se pudieran validar la señal recuperada de cada sensor.
3.1 Recuperación de la señal del sensor 1
El filtro de tercer orden implementado es el mostrado en la Figura 8, la primera etapa es de segundo orden
basado en un filtro Sallen Key, y la segunda etapa es de orden 1. Los dos filtros tienen como frecuencia de
corte un valor de 225 Hz. La Tabla 1 muestra la prueba realizada, “Vo de señal del sensor” es el voltaje

1er CONGRESO ESTATAL DE ROBÓTICA 27-28 de noviembre de 2014
Figura 8. Filtro pasa bajas de tercer orden
Tabla 1. Valores de entrada y salida, filtro pasa bajas
Vo de señal del sensor Vout del MAV
0.996 V 0.853 V
1.518 V 1.373 V
2.008 V 1.854 V
2.507 V 2.338 V
3.008 V 2.824 V
3.505 V 3.247 V
tomado una vez pasada la ganancia K1, que reduce en amplitud de 0 a 3.3V, “Vout del MAV” es la señal de
salida, procedente del MAV una vez pasada la señal por el filtro pasa bajas. Una vez adquiridos los datos, se
procede a realizar un análisis de regresión lineal mediante el software Minitab, por la técnica de mínimos
cuadrados, la cual dio un R cuadrado ajustado del 99.9%. Dando como resultado la ecuación 4, validando el
comportamiento lineal de entrada a la salida; En la ecuación 4, Vsen es el voltaje de salida del sensor,
ajustado en amplitud de 0 a 3.3V, y Vmav corresponde al voltaje de salida que se obtiene del MAV.
(4)
Del ajuste por regresión, se obtiene como resultado que para recuperar la información del sensor 1 con
mejor precisión, es necesario adicionar una operación de resta, en la que se sustrae el valor de 0.0805V, y el
factor de amplificación es de 0.960.
3.2 Recuperación de la señal del sensor 2
Para la recuperación del sensor 2, se implementó el filtro de banda estrecha mostrado en la Figura 9. Se
midieron los valores de salida del MAV y el voltaje pico a pico (Vpp) de la señal modulada f1 de 2 KHz. La
Tabla 2 muestra los valores tomados de la prueba.

1er CONGRESO ESTATAL DE ROBÓTICA 27-28 de noviembre de 2014
Figura 9. Filtro de banda estrecha, sintonizable, con valores de los componentes.
Tabla 2. Valores de entrada y salida, filtro pasa banda
Vpp de señal modulada de 2 KHz
Vout del MAV
1.0 V 0.198 V
1.5 V 0.277 V
1.95 V 0.365 V
2.45 V 0.441 V
2.95 V 0.524 V
3.47 V 0.634 V
Con los valores de la Tabla 2 se aplica la regresión, utilizando la técnica de mínimos cuadrados. De esta
manera se encuentra un R cuadrado ajustado del 99.8%, validando la linealidad del comportamiento, y
encontrando los parámetros para reducir el error. Dando como resultado, la ecuación de regresión:
(5)
Dónde Vmav corresponde al voltaje de salida que se obtiene del MAV, Vpp corresponde al voltaje pico-pico
de la señal portadora de frecuencia de 2 KHz. Con este resultado, se puede determinar la relación existente
entre la señal de entrada y de salida, y se aprecia un error de 0.0107 V. Además, al aplicar la regresión se
obtiene la ecuación que permite recuperar la señal del sensor 2.

1er CONGRESO ESTATAL DE ROBÓTICA 27-28 de noviembre de 2014
Figura 10. Filtro pasa altas de tercer orden.
3.3 Recuperación de la señal del sensor 3
Para el sensor 3, se implementó el filtro pasas alta mostrado en la Figura 10, compuesto de una etapa de
segundo orden mediante la estructura Sallen-Key, y una etapa de primer orden. Con este Filtro se realiza la
misma experimentación que la aplicada para recuperar la señal del sensor 2.
4. CONCLUSIONES
En este trabajo la multiplexación y demultiplexación de 3 señales de sensores analógicos de 0 a 10V es
implementado, las señales son demultiplexadas mediante filtros activos. Las etapas de diseño se basan en
interpretación de los diagramas de Bode, y el análisis de los sistemas analógicos a utilizar para tener el
mejor ajuste. Los resultados son medidos de forma experimental. Se realizan ajustes de regresión que
permiten obtener la relación de las señales de entrada y salida, y así encontrar las configuraciones
electrónicas que hacen falta para recuperar con alta fidelidad las señales. En base a la regresión determina
que hace falta una configuración de amplificador operacional en modo sumador y otro en modo
multiplicador, para reducir el error a la hora de recuperar las señales.
5. BIBLIOGRAFÍA
[1] Brunker, D. L., & Crane, B. j. (22 de Septiebre de 1992). Estados Unidos Patente nº US5149915 A.
[2] Carbrey, R. L. (11 de Diciembre de 1979). Unites States Patente nº 4,178,480.
[3] Coughlin, R. F. (1999). Amplificadores operacionales y circuitos integrados lineales. Pearson
Educación.

1er CONGRESO ESTATAL DE ROBÓTICA 27-28 de noviembre de 2014
[4] Cuji, C., Patricio, J., & Manobanda, R. &. (2014). Diseño e implementación de un módulo para
controlar un equipo ASI Bus integrado a una red de comunicación por radio, sobre Ethernet.
[5] Grattan, K. T., & & Sun, T. (2000). Fiber optic sensor technology: an overview. Sensors and Actuators
A. Physical, 82(1), 40-61.
[6] Jimenez, V. G., & Yuste, R. Y. (2012). Comunicaciones industriales Siemens. Marcombo.
[7] Kaschel, I. H. (2001). Análisis del estado del arte de los buses de campo aplicados al control de
procesos industriales. Ciencia abierta, 19.
[8] Kashel, H. &. (2005). Análisis protocolar del bus de campo CAN.
[9] Kuroda, K., Sakaguchi, K., Takada, J. I., & & Araki, K. (2002). FDM based MIMO Spatio-Temporal
Channel Sounder. Wireless Personal Multimedia Communications, 2, págs. 559-562.
[10] Maloney, T. J. (2006). Electrónica industrial moderna. Pearson Educación.
[11] Malvino, A. (2007). Principios de electronica. España: Mc Graw Hill.
[12] Marin Moreno, W. (2003). El Modelo OSI.
[13] McFarlane, A. (1997). Fieldbus review. Sensor Review, 17(3), 204-210.
[14] Metcalfe, R. M. (1976). Ethernet distributed packet switching for local computer networks.
Communications of the ACM, 19(7), 395-404.
[15] Negishi, S., & Tahara, K. &. (2 de Julio de 2002). United Sates Patente nº 6,414,970.
[16] Ogata, K. (2006). Ingeniería de Control Moderna (Cuarta ed.). (I. Capella, Ed.) Madrid, España:
Prentice Hall.
[17] Okada, A., Curri, V., Gemelos, S. M., & & Kazovsky, L. G. (1998). Reduction of four-wave mixing
crosstalk using a novel hybrid WDM/TDM technique. Optical Communication,, (págs. 289-290).
European Conference on.
[18] Pigan, R. &. (2008). Automating with PROFINET.
[19] Tovar, E. &. (1999). Real-time fieldbus communications using Profibus networks. Industrial
Electronics, IEEE Transactions on, 6(46), 1241-1251.
[20] Tovar, E. y. (2008). Un instrumento Virtual Sencillo de Adquisición de Datos y Control de
Temperatura para la deterinación Experimental de Calores de Vaporización. Revista colombiana de
Física, 40(2), 349-351.

1er CONGRESO ESTATAL DE ROBÓTICA 27-28 de noviembre de 2014
[21] Villajulca, j. (Julio de 2010). Obtenido de instrumentacionycontrol:
http://www.instrumentacionycontrol.net/cursos-libres/automatizacion/curso-supervision-
procesos-por-computadora/item/271-los-buses-de-campo-directo-al-grano.html
[22] Yoo, S. B. (1996). Wavelength conversion technologies for WDM network applications. Lightwave
Technology, 14(6), 955-966.