Embed Size (px)
Citation preview

ITS・自動運転を巡る最近の動向(2018年春以降の動き)
平成30年12月5日内閣官房IT総合戦略室
参考資料5
(注)本資料の一部は、報道情報等に基づき事務局が作成したもの。

目次
<自動運転車の市場化、実証を巡る最近の動向> 国内外での開発・市場化を巡る動向 海外での実証実験を巡る動向 海外(中国)での実証実験を巡る動向 日本における実証実験を巡る動向
<自動運転車の政策を巡る最近の動向> 米国における政策動向 欧州における政策動向(イギリス・ドイツ) 日本における政策動向

企業名 概要トヨタ 自動運転コンセプト「Mobility Teammate Concept」を発表し、それに基づき、
自動車専用道路の入口から出口までを自動走行することが可能な「Highway Teammate」(レベル2~3相当)を2020年頃に実用化することを発表
日産 2016年に自動車専用道路の単一車線自動運転技術「プロパイロット」を市場投入 2018年に自動車専用道路の複数車線自動運転技術「プロパイロット2.0」を市場化予定 2020年に街中の交差点を自動走行できる技術「プロパイロット3.0」を市場化予定
ホンダ 2020年に高速道路でレベル3に相当する自動運転技術を実用化その後、利用できる範囲を一般道に拡大
2025年をめどにレベル4自動運転を技術的に確立
国内外での開発・市場化を巡る動向 各自動車メーカーから市場化時期に関する方針が発表されている。 市場化に向けて、実証実験の動きが加速している。
国内自動車メーカーの動き
国内外での開発・市場化を巡る動向
海外自動車メーカー等の動き
企業名 概要
Waymo(Google)
2018年11月、12月にアリゾナ州で無人の自動運転車による有料配車サービスを開始することを発表。 カリフォルニア州内の公道でドライバーのいない無人運転試験を行う許可を同州車両管理局から取得。 2019年にはカリフォルニア州にも無人の自動運転車による有料配車サービスを拡大する予定との報道あり。
GM 2018年1月、ライドシェアやタクシー市場へ、2019年に無人自動運転の量産車を実用化すると発表。 2018年10月、ホンダがGM及びクルーズと自動運転車開発で協業すると発表。
Tesla 2017年7月、モデル3(既に発売済のレベル2対応の廉価版)の販売を開始。自動運転機能を利用するためのハードウェアが5,000ドルで購入可能。今後バージョンアップにより完全自動運転に近づける公算。
Audi(VWグループ)
2017年に世界初となるレベル3の機能(但し時速60km以下の高速道路上の交通渋滞時対応のみ)を搭載した新型「A8」を発表したが、レベル3に対応した車両安全基準が策定されていないため、レベル3の機能は利用できない形で発売。
より高機能化したレベル3の「ハイウェイパイロット」(制限速度内の自動走行)を2020年から2021年に導入する予定。
事業者向けには、早ければ2021年度に自動運転レベル4の車両の提供開始を目指している。
BMW 完全自動運転車の開発促進に向け、米Intel社、イスラエルMobileye社、米Delphi Automotive社、独Continental社、米FCA社と提携している。
2021年までに複数の完全自動運転車が連携して稼働するシステムの実現を目指している。

海外での実証実験を巡る動向
自動運転車によるタクシーサービスや配送サービス等、自動運転車の商用化を見据えたサービス提供に関する実証実験が増加。
企業名 概要GM • 米サンフランシスコ等の都市部での実証実
験を継続して実施中。
Ford • 2018年11月、Walmartと提携し自動運転車による商品配送サービスを実施すると発表。
企業名 概要Waymo • 2018年10月、米カリフォルニア州で初めてドライ
バーなしの自動運転車による公道実証実験の許可を取得。
• 2018年10月、米アリゾナ州にて自動運転によるタクシー配車サービスを年内に開始することを発表。
• 2018年10月に自動運転車による走行距離が1,000万マイルを突破したと発表。
Lyft • 2018年5月、自動運転技術を開発するAptiv社と連携し、ラスベガスにて自動運転車による配車サービスを開始、8月に配車回数が5,000回突破。
Uber • 2018年3月の死亡事故を受け実証実験を中止していたが、8月より米ピッツバーグ市等で再開。
• 2018年8月、自動運転トラック開発の凍結を発表。Embark • 2018年2月、自動運転トラックによる初のアメリカ大
陸横断に成功。
自動車メーカー IT・新興企業<米国>
企業名 概要ダイムラー
• 2018年8月、ボッシュと提携し2019年後半に米カリフォルニア州サンノゼで自動運転車による配車サービスを実施すると発表。
Audi • 2018年9月、中国江蘇省無錫市でレベル4自動運転の実証実験ライセンスを取得。2019年度第1四半期に開始予定。
フォルクスワーゲン
• 2018年10月、モービルアイ社と連携し、2019年からイスラエルにて自動運転車による配車サービスの実証を行うと発表。
<欧州>
<米国>
企業名 概要EasyMile(仏)
• 2018年11月、シンガポール国立大学内の混在交通下でシャトルバスサービスを開始。
NavyaTechnology(仏)
• 2018年11月、フランス・ドローム県の交通事業者と連携し、2019年1月より地方でのモビリティ確立のための実証実験を実施予定。
<欧州>

自動運転の実証実験への懸念(海外)
自動運転の実証実験が進むアメリカにおいて、安全性への懸念等を示す声も存在。
• 2017年10月、GMは2018年初期にマンハッタンにてレベル4の自動運転車の実証実験を行うと発表。
• ニューヨーク州のアンドリュー・クオモ知事は歓迎のコメントを発表したが、ニューヨーク市のビル・デブラシオ市長は「安全性を非常に懸念している。実証実験を阻止するよう働きかける」とコメント。
• 2018年11月現在、GMによるニューヨーク市内での実証実験は行われていない。
<米ニューヨーク州・ニューヨーク市>
参考:https://www.cbsnews.com/news/driverless-cars-new-york-city-andrew-cuomo/https://nypost.com/2017/10/19/de-blasio-crusades-against-self-driving-car-initiative/
<米イリノイ州・シカゴ市>• 市議会運輸委員会の委員長が、安全への懸念やタクシー運転手などの雇用に影響が出る可能性を理由に、自動運転車の導入阻止を表明している。
• 一方、イリノイ州は、全国に先駆けた自動運転の導入を目的に、産官学連携の実証実験プログラム「Autonomous Illinois」を発表。
参考:https://www.wsj.com/articles/self-driving-cars-encounter-political-roadblocks-1542623400http://chicagoist.com/2016/09/14/aldermen_are_trying_to_stop_uber_se.phphttp://www.idot.illinois.gov/autonomous
<米ペンシルベニア州・ピッツバーグ市>• ピッツバーグ市は、2018年3月のUberによる事故を受けて、同7月に「自動運転車の安全性の監視強化に関するガイドライン」を発表。法的拘束力はないものの、時速25マイル以上で走行する場合は運転席だけでなく助手席にも保安要員のエンジニアを同乗させることを義務づけるなど、厳格な内容。
• また、地元経済への貢献を明確化するため、実証実験によりもたらされる雇用や、新たに導入される施設に関する情報について、提出を求めている。
参考:https://www.penndot.gov/pages/all-news-details.aspx?newsid=514https://triblive.com/local/allegheny/13915736-74/self-driving-car-companies-muted-on-updated-penndot-guidelines

海外(中国)での実証実験を巡る動向
大きく2つの方向性で実証実験を推進している。① 中国のIT系企業が欧米の自動車メーカーと組んだ実証実験② 国が関与して都市全体を自動運転向けにデザインする構想
企業名 概要百度 • 2018年10月、フォードと組んで中国国内で自動運転車の共同実証実験を行うことを発表。
2年間の契約期間中にレベル4に相当する高度自動運転技術を検証する。まずは年内に北京で実証実験を始める。
ファーウェイ • アウディとレベル4の走行実験を成功したと報道。ファーウェイ開発の車載モジュールを搭載。• 2018年11月、ボッシュとも提携することが明らかになった。
広州市公共交通集団広州汽車集団
• 2018年11月、中国初とされる自動運転タクシーの実証実験を広東省広州市で開始。運転は自動だが、安全確保のため係員が同乗する仕組み。今後実験の範囲や時間を広げて、将来的には同市全域での実施を目指す。
都市名 概要雄安新区(河北省)
• 自動運転車と交通システムの双方を開発して、交通事故のない街を一から作るという構想。東京都の面積に匹敵する土地に総額約100兆円を投資して、インフラ設備等を整え、インフラ協調型の自動運転を目指している。百度などの企業が開発に取り組んでいる。
企業による実証実験
自動運転向け都市における実証実験

企業名 概要DeNA、日産自動車
• 2018年3月、みなとみらいにおいて自動運転車を使った交通サービス「EasyRide」の実証実験を実施。
• 自動運転物流サービスを目指す「ロボネコヤマト」プロジェクトを実施。
SBドライブ・先進モビリティ
• 福島第一原発構内(Navya)や江の島大橋(日野ポンチョ)など、各地でバス実証実験を実施。
• 2018年7月、中国・Baidu社の自動運転バス「Apolong」の日本導入に向けた協業について合意。
ZMP・日の丸交通
• 2018年8月、大手町~六本木間の公道において世界初となる自動運転タクシーの営業走行実験を実施。
NTTドコモ、NEDO
• 2018年10月、スマートフォン等で観光施設等の検索や当該施設までの移動サービスを提供する「AI運行バス」の実証実験を開始。
日本における実証実験を巡る動向 自動運転車の走行を目的とした実証実験だけでなく、自動運転車を使った交通サービスの提供を目指した実証実験が行われ始めている。
IT・新興企業
大学・地方自治体団体等 概要
愛知県 • 2018年11月、豊橋市で1人が2台の自動運転車を同時に遠隔監視する実証実験を実施。
群馬大学 • 2018年9月、NTTデータ、大和自動車交通と共同でオンデマンド移動サービスの公道実証実験を実施。
金沢大学 • 2015年2月以降、珠洲市内の公道で実証実験を継続中。
府省 概要内閣府 • 2017年10月から大規模実証実験を開始。国内外の
自動車メーカー等が参加し、ダイナミックマップなどの実験を2019年3月にかけて行う。
国土交通省 • 2018年度は全国13箇所において、道の駅等を拠点とした自動運転サービスの実証実験を実施。
• 2018年11月、福岡県みやま市において、ビジネスモデル構築等を目的にした長期間(50日)の実験を開始。
産総研、経産省、国交省
• 2018年11月、福井県永平寺町にて世界で初めて、遠隔ドライバー1名が2台の自動運転車を公道で運用する実証を実施。
JARI、経産省、国交省
• 2018年11月、東京・台場にて自動バレーパーキングの実証実験を実施。
国主導プロジェクト団体名 概要自工会 • 2020年7月、羽田空港地域のバス、羽田空港から臨海副都
心・都心部の高速道路、臨海副都心地域においてレベル2~4相当の実証実験を行う予定。
自動車メーカー、関係団体

米国における政策動向①
これまで、自動運転車に係る規制は各州独自に法制化を進めてきたが、州ごとに要件が異なっていたことから、米国統一ルールとして連邦法の制定が検討されている。
2017年9月6日、連邦法「SELF DRIVE Act」が米国下院にて法案可決。 上院においては、「SELF DRIVE Act」にいくつかの変更を加えた「AV START Act」として議論されているが、Uberによる事故の影響で未だ成立していない。
<「SELF DRIVE Act」(概要)> 商用車と既に発売済の自動車は当該法案の対象外。 車両登録、運転免許、保険、道路交通法等は現行通り、州の権限とする。 「連邦自動車安全基準」の見直しを行う。 メーカーに「安全性評価証明書」の提出を義務付け、安全性能を担保する。
(※運輸長官は、本法案の制定日から24ヵ月以内に 「安全性評価証明書」の提出を義務付ける規則を発行する。) メーカーがサイバーセキュリティーに係る方針を策定しない限り、販売や米国への輸入はできない。 安全性が証明されれば、連邦の安全基準に合致していない自動車でも、一定台数(1年目は25,000台)まで公道試験が可能。
「高度自動化車両諮問委員会」を設置し、自動運転車の車両データの取扱いやプライバシー、障がい者、高齢者の公共交通へのアクセス改善等について、ベストプラクティスを検討する。
<「AV START Act」の「SELF DRIVE Act」との主な相違点>①サイバーセキュリティの脆弱性、情報開示の奨励、②プライバシー保護対策の具体化、③公道での実験走行のために連邦自動車安全基準から免除される高度自動化車両の台数(下院案より縮減)④消費者への情報提供の具体化、⑤現行基準と高度自動化車両との不一致の解決、⑥高度自動化車両データアクセス諮問委員会の設置等

米国における政策動向②
2018年10月にNHTSA(運輸省国家道路交通安全局)が、改訂版ガイドライン(3.0)を発表。ポイントは以下の通り。 昨年のガイドライン(2.0)を前提に、「自動運転政策及びプログラム策定の指針となる6原則」及びその実行にあたっての5戦略を提示
自動運転導入に係る利害関係者を細分化し、従来記載のあった政府部門や州政府だけでなく、民間部門や公共交通機関等も含め、果たすべき役割やベストプラクティスを提示
自動運転政策及びプログラム策定の指針となる6原則① 安全性の重視:自動走行技術に起因する安全面のリスクへ対応② 技術中立性の維持:安全性、モビリティ及び経済目標を達成するため、フレキシブルかつ技術中立的な競争・イノベーション推進政
策の導入③ 規制の見直し:技術開発を妨げる規制の見直しまたは廃止。長期にわたって利用可能なフレキシブルなアプローチ、及び、コンセン
サスに基づく自主的技術基準の開発。更に、「運転手」及び「オペレーター」の定義を再考し、新定義を人間だけでなく自動システムにも適用
④ 一貫した規制・運用環境の奨励:州・地方政府によって異なる法規制は、混乱を招き、順守上の課題がある。運輸省は、全米各地での円滑な普及を狙い、規制の統一化に向けて、州・地方政府の運輸機関及び業界利害関係者と協力
⑤ 自動化への積極対応:運輸省は、パートナー機関・企業による、自動化に関する投資及び計画設定に役立つガイダンス、ベストプラクティス、パイロット計画等を提供
⑥ 米国人が享受する自由の保護及び強化:消費者ニーズに適したモビリティを選択する自由、障害者及び高齢者が利用できる安全な単独移動手段を拡充し、個人の移動を支える自動化技術の支援
上記 6 原則を行動に移す5 戦略① 自動化に起因する課題に対応するため、利害関係者及び一般市民と協働② 利害関係者を支援するため、ベストプラクティス及び政策方針を提供③ 利害関係者及び標準検討機関(SDO) と協力し、自主的技術基準を促進④ 将来の政策決定及び施行に情報を提供するために必要な、的を絞った(targeted) 技術研究の実施⑤ 自動運転車を陸上輸送システムへ統合する際に課題となり得る、既存の連邦規制及び基準の見直し

欧州における自動運転に係る政策動向(イギリス)
2018年7月、イギリス議会において「自動運転と電気自動車に関する法律」が可決。 本法は、強制自動車保険の対象を自動運転車まで拡大し、保険請求を迅速、公平、容易に行うことを可能にすることが狙い。
条件を満たす車両(自動運転車)の型式を運輸大臣がリストに掲載、更新、公表する。(どの自動車が当該法案の適用範囲であるか把握可能にしている。)
自動運転中に事故が起きた場合、保険会社は車内外の被害者及び負傷した運転者に対して一次的に補償する責任を負う。
保険を付保していない場合には、上記責任を車両所有者が負う。
自動運転車の事故についても過失相殺の原則を適用。
違法改造が行われた場合や、安全性において重要なソフトウェアの更新を行わなかったことに起因する損害について、保険会社はその支払責任の一部または全部を免れることができる。
事故の原因となった者に対する保険会社等の請求権を定めている。
<これまでの経緯>• 英国運輸省は2016年7月、自動運転車の法整備に係る政府方針を公表し、パブコメを実施。
• 同省は、パブコメ結果等を踏まえ、2017年1月、自動車強制保険の見直しを含む修正方針を公表。
• 同省は2017年2月に「自動車技術と航空に関する法案(Vehicle Technology and Aviation Bill)」を議会に提出。
• 2017年5月、総選挙の結果により法案は事実上の廃案となる。
• 2017年6月、クイーンズスピーチで「自動運転と電気自動車に関する法案(Automated and Electric Vehicles Bill)」が言及され、今期国会の法案に盛り込まれることとなる。
• 2017年10月、運輸省は上記法案を下院議会に提出。
• 2018年1月、上院議会での議論が開始。• 2018年7月19日、法案が可決。
<自動運転と電気自動車に関する法律(概要)>

欧州における自動運転に係る政策動向(ドイツ) ドイツでは、限定的なレベル3相当の実用化を認める道路交通法を2017年6月から施行しており、Audiからレベル3相当の機能(高速道路での渋滞時における自動走行機能)を搭載した車が発売されている。
一方、ドイツでは公道走行には、国連WP29(自動車基準調和世界フォーラム)において当該機能に係る国際的な車両安全基準の策定が必要であり、現時点で公道走行はできない。
高速道路における自動車線維持機能(レベル3)については、2018年2月よりWP29で検討が開始しており(赤枠)、早ければ2019年後半までに国際基準案の策定を目指す。
• ドイツ連邦政府は、2015年9月、インフラ、法、技術革新、情報通信、サイバーセキュリティ・データ保護の5分野に関する「自動運転戦略」を発表。
• Audiは、2016年9月、2017年に発売する新型「A8」で、世界初となるSAEレベル3の機能(時速60km以下の高速道路上の交通渋滞時に限定された機能:Traffic Jam Pilot)を搭載予定と発表。
• ドイツ連邦政府は、2017年1月25日、SAEレベル3相当の自動運転を実用化する観点から、道路交通法の改正案を閣議決定(2月20日、議会提出)。
• 2017年5月ドイツ議会で改正案を可決。• 2017年6月公布・施行。• 2017年7月、Audiは新型「A8」を発売。
<ドイツにおける道路交通法改正の経緯> <自動車線維持機能の国際基準の検討状況>(自動運転に係る制度整備大綱SWG(2018年11月7日)国交省資料)

欧州における自動運転に係る政策動向(ドイツ)
PEGASUSプロジェクトは、2016年にドイツ経済エネルギー省により設立された、産官学17団体によるプロジェクト。安全性の評価フレームワークを定義することを目的としている。
安全認証プロセスを実現することで、ドイツが自動運転の分野で主導権を握ることが狙い。
<プロジェクト概要> 期間:2016年1月~2019年6月 パートナー:自動車メーカー(Audi, BMW, Daimler等)、 Tier-1サプライヤ、
研究機関、中小企業、科学機関等(17団体) 予算:3,450万ユーロ
<プロジェクトの目的> 自動運転車両にはどの程度の性能が期待されるのか? 要求される性能の達成をどのように確認するのか?➡自動運転システムのテストと実験における標準化された手順を定義。➡自動運転機能を保護するための、システムの開発。➡開発プロセス初期段階におけるテスト条件の統一。
参照:http://www.pegasus-projekt.info/
PEGASUSProject for the Establishment of Generally Accepted quality criteria, tools and methods as well as Scenarios and Situations for the release of highly-automated driving functions

日本における自動運転に係る政策動向(1/2) 自動運転の実現に向けた制度整備やビジネスモデル検討、社会受容性醸成に関する動きが加速している。
<政府の主な取り組み><制度面、ビジネスモデル、社会受容面等の検討> 「自動運転に係る制度整備大綱サブワーキンググループ」(内閣官房 IT総合戦略室)
• 自動運転に係る制度整備大綱のフォローアップ 「自動走行に係る官民協議会」(内閣官房 経済再生総合事務局)
• 官民連携の下、実証プロジェクトの進捗管理、実証の成果・データの共有、必要な制度整備等について協議(2017年8月~) 「産官協議会 次世代モビリティ/スマートシティ」(内閣官房 経済再生総合事務局)
• 「移動弱者ゼロ、混雑解消」を目指し、地方における移動の足の確保や都市での混雑解消に係る方策を検討(2018年10月~) 「技術開発の方向性に即した自動運転の実現に向けた調査検討委員会」等(警察庁)
• 道路交通法に関連する課題を検討(2015年10月~) 「自動走行の民事上の責任及び社会受容性に関する研究」(経済産業省・国土交通省)
• 自動走行に関するユーザー期待と技術のギャップ、事故時の責任関係を整理し、社会受容性を検証(2016年10月~) 「自動走行ビジネス検討会」 (経済産業省・国土交通省)
• 産官学オールジャパンで検討が必要な協調領域重要10分野を選定、各種検討や実証実験を推進(2015年2月~) 「自動運転車両安全対策ワーキンググループ」(国土交通省)
• 自動運転車両の安全技術ガイドラインを2018年9月に策定済 「自動運転等先進技術に係る制度整備小委員会」(国土交通省)
• 道路運送車両法に関連する課題を検討(2018年9月~) 「都市交通における自動運転技術の活用方策に関する検討会」(国土交通省)
• 将来的な自動運転の活用に向け、自動運転技術の都市への影響可能性の整理や活用を検討(2017年11月~) 「中山間地域における道の駅等を拠点とした自動運転ビジネスモデル検討会」(国土交通省)
• 「道の駅」等を拠点とした自動運転移動サービスの2020年までの社会実装を目指しビジネスモデルを検討(2017年7月~)

日本における自動運転に係る政策動向(2/2)
<政府の主な取り組み><研究開発と技術面での検討> SIP自動走行システム(第1期:内閣府)
• 大規模実証実験を開始(2017年10月) SIP自動運転(システムとサービスの拡張)(第2期:内閣府)
• 自動運転の実用化を一般道へ拡張および、自動運転技術を活用した物流・移動サービスの実現を目指す(2018年度~) 第6期先進安全自動車(ASV)推進検討会(国土交通省)
• 自動運転の実現に向けたASVの推進を検討(2016年11月~)
<MaaS等の新たなモビリティサービスの検討> IoTやAIが可能とする新しいモビリティサービスに関する研究会(経済産業省)
• 新しいモビリティサービスに関する我が国の現状と課題を整理しつつ、官民が取り組むべき方策について検討(2018年6月~) 都市と地方の新たなモビリティサービス懇談会(国土交通省)
• 都市・地方が抱える交通サービスの諸課題を解決することを目指し、我が国における望ましいMaaSのあり方、バス・タクシー分野でのAI・自動運転の活用に当たっての課題抽出・今後の取組の方向性などを検討(2018年10月~)
<G7とその対応等の検討> G7交通大臣会合(国土交通省)
• 高度自動運転技術の実用化に向けて、WP29における国際的なレベルでの協力を目指すことに合意(2017年6月) 国土交通省自動運転戦略本部(国土交通省)
• G7交通大臣会合、未来投資会議等の議論等を踏まえつつ、的確に対応するため設置(2016年12月~)
内閣府のSIP自動走行システム(第1期)、SIP自動運転(第2期)を中心とした研究開発がさらに加速している。
さらに、MaaS等の新たなモビリティサービスについても検討を開始。
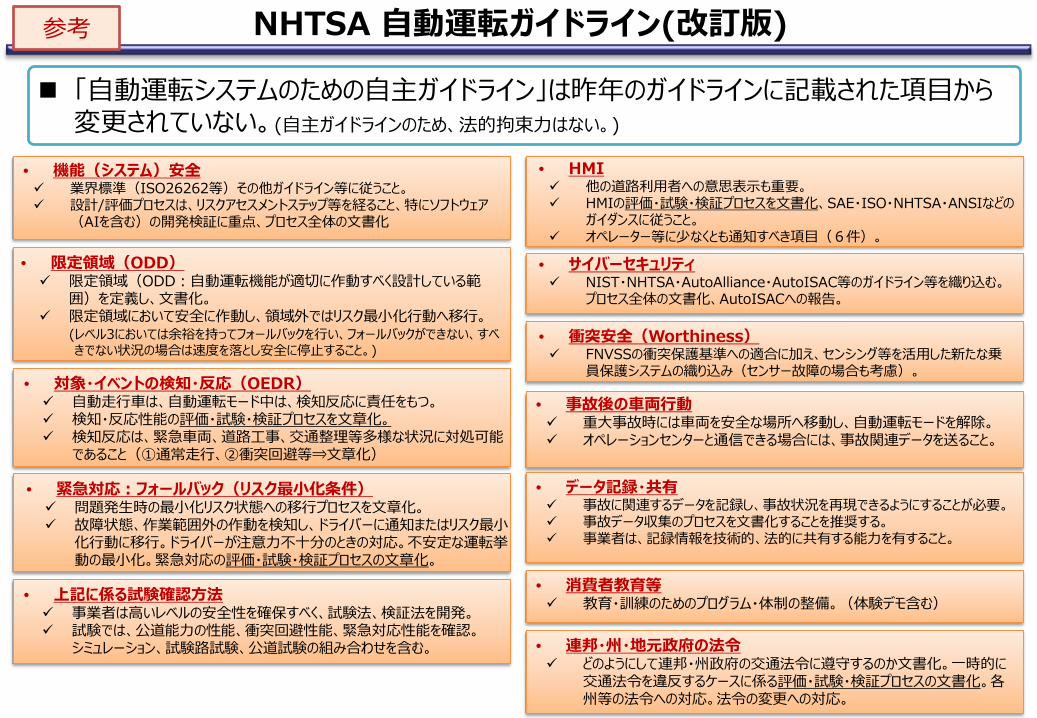
• HMI 他の道路利用者への意思表示も重要。 HMIの評価・試験・検証プロセスを文書化、SAE・ISO・NHTSA・ANSIなどの
ガイダンスに従うこと。 オペレーター等に少なくとも通知すべき項目(6件)。
• データ記録・共有 事故に関連するデータを記録し、事故状況を再現できるようにすることが必要。 事故データ収集のプロセスを文書化することを推奨する。 事業者は、記録情報を技術的、法的に共有する能力を有すること。
• 衝突安全(Worthiness) FNVSSの衝突保護基準への適合に加え、センシング等を活用した新たな乗
員保護システムの織り込み(センサー故障の場合も考慮)。
• 消費者教育等 教育・訓練のためのプログラム・体制の整備。(体験デモ含む)
• 事故後の車両行動 重大事故時には車両を安全な場所へ移動し、自動運転モードを解除。 オペレーションセンターと通信できる場合には、事故関連データを送ること。
• 連邦・州・地元政府の法令 どのようにして連邦・州政府の交通法令に遵守するのか文書化。一時的に
交通法令を違反するケースに係る評価・試験・検証プロセスの文書化。各州等の法令への対応。法令の変更への対応。
• 機能(システム)安全 業界標準(ISO26262等)その他ガイドライン等に従うこと。 設計/評価プロセスは、リスクアセスメントステップ等を経ること、特にソフトウェア
(AIを含む)の開発検証に重点、プロセス全体の文書化
• 限定領域(ODD) 限定領域(ODD:自動運転機能が適切に作動すべく設計している範
囲)を定義し、文書化。 限定領域において安全に作動し、領域外ではリスク最小化行動へ移行。
(レベル3においては余裕を持ってフォールバックを行い、フォールバックができない、すべきでない状況の場合は速度を落とし安全に停止すること。)
• 対象・イベントの検知・反応(OEDR) 自動走行車は、自動運転モード中は、検知反応に責任をもつ。 検知・反応性能の評価・試験・検証プロセスを文章化。 検知反応は、緊急車両、道路工事、交通整理等多様な状況に対処可能
であること(①通常走行、②衝突回避等⇒文章化)
• 上記に係る試験確認方法 事業者は高いレベルの安全性を確保すべく、試験法、検証法を開発。 試験では、公道能力の性能、衝突回避性能、緊急対応性能を確認。
シミュレーション、試験路試験、公道試験の組み合わせを含む。
• 緊急対応:フォールバック(リスク最小化条件) 問題発生時の最小化リスク状態への移行プロセスを文章化。 故障状態、作業範囲外の作動を検知し、ドライバーに通知またはリスク最小
化行動に移行。ドライバーが注意力不十分のときの対応。不安定な運転挙動の最小化。緊急対応の評価・試験・検証プロセスの文章化。
NHTSA 自動運転ガイドライン(改訂版)
「自動運転システムのための自主ガイドライン」は昨年のガイドラインに記載された項目から変更されていない。(自主ガイドラインのため、法的拘束力はない。)
• サイバーセキュリティ NIST・NHTSA・AutoAlliance・AutoISAC等のガイドライン等を織り込む。
プロセス全体の文書化、AutoISACへの報告。
参考





























