SISTEM MAGNETNE LEVITACIJE (Princip rada magnetne levitacije)1.
U V O DInteres za analizom procesa stabilnog lebdenja metalne kugle
u magnetnom polju datira jo iz tridesetih godina prolog veka. Sem
izuzetnog vizuelnog efekta, proces moe da poslui za ilustraciju
brojnih fundamentalnih principa iz oblasti elektromagnetizma i
elektrodinamike, teorije upravljanja, projektovanja analognih i
digitalnih kola. Bitna prednost sistema aktivnog veanja u magnetnom
polju je rad bez trenja i habanja. Otuda ova tehnologija danas
nalazi brojne primene u industriji, za potrebe brzog transporta,
kod izrade magnetnih leajeva i slino. Pri upravlajnju takvim
sistemima, najvei problem je opis sloenog dinamikog ponaanja
elektromagneta i postojeih sila. tavie, taan opis je i nemogu,
budui da se postie nelinearnim diferencijalnim jednainama
beskonanog reda, a takav model svakako nije podesan pri sintezi
upravljakog sistema. Sistem elektromagnetne levitacije je jako
nelinearan objekat bez upravljanja u povratnoj sprezi inherentno
nestabilan. Na slici 1. prikazan je laboratorijski instrument koji
slui za demonstraciju efekata i upravljanje levitacijom kugle u
magnetnom polju nasuprot dejstvu sile gravitacije, uz mogunost
praenja unapred zadate trajektorije.
Primenjeni upravljaki signal je naponski, koji se unutar
mahanike jedinice konvertuje u strujni, da bi se zatim u blizini
postojeeg elektromagneta formiralo upravljivo magnetno polje.
Pozicija kugle, koja se kree du vertikalne ose elektromagneta,
odreuje se sistemom infracrvenih detektora. Laboratorijski
instrument magnetne levitacije sa slike 1. moe da radi samostalno,
uz jednostavno analogno upravljanje, kao i u sprezi sa PC raunarom
u MATLAB-Simulink okruenju, gde je mogue implementirati razliite
digitalne upravljake zakone pozicioniranja i praenja.
Magnetna levitacija je tehnologija bazirana na magnetiznu u
kojoj jedan objekat lebdi (levitira) nad drugim bez ikakve mehanike
potpore, ve samo uz pomo magnetnog polja. U njemu se dejstvo
gravitacione sile ponitava dejstvom elektromagnetne sileistog
inteziteta i pravca ali suprotnog smera ime se postie lebdenje.Da
bi se ovakav sistem odrao stabilnim neophodna je elektronska
stbilizacija magnetne levitacije.Jedan od praktinih primera ove
tehnologije jesu MAGLEV vozovi.
MAGLEV vozoviMAGLEV (skraeno od magnetska levitacija) vozovi
predstavljaju posebnu vrstu brzih vozova iji je princip rada
zasnovan na tzv. magnetskoj levitaciji. To u praksi znai da sam voz
zahvaljujui dejstvu elektromagnetske sile lebdi (levitira) nad
posebnom vrstom ina, to znai da ne postoji sila trenja izmeu voza i
ina. Na taj nain je voz u svom kretanju suoen samo sa silom otpora
vazduha koja je mnogo manja u odnosu na silu trenja izmeu klasinih
vozova i ina, ime se kod MAGLEV vozova postie drastino vea brzina.
Ovaj sistem je za sada i dalje u fazi ispitivanja. Jedina za sada
operativna MAGLEV eleznica nalazi se u angaju (Slika 2.) i povezuje
grad sa aerodromom Pudong u duini od 30 km na kojoj je najvea
zabeleena brzina 501 km/h. Pored toga irom sveta postoji nekoliko
eksperimentalnih trasa na kojima je najvea do sada zabeleena brzina
581 km/h, a naunici pretpostavljaju da je teorijski mogue dostii
brzine od oko 900 km/h. Jedna od najveih mana ovog sistema je
visoka cena izgradnje, zbog koje je gradnja MAGLEV eleznica
isplativa samo na deonicama na kojima se prevozi velika koliina
putnika i dobara, iako je cena samog odravanja (kako vozova, tako i
pruge) nakon izgradnje izuzetno niska.
Slika 2. Maglev voza u angaju
Maglev sistem - sistem transporta za putnike i visokovrednovani
kargo saobraaj, prvi je fundamentalno inovacioni sistem u sistemu
eleznice jos od konstrukcije prve eleznike pruge.Tehnologija bez
kontakta korienje elektronike umesto mehanikih komponenti po prvi
put prevazilazi kako tehnike tako i ekonomske granice tehnologije
na tokovima. Ovo je potpuno drugaiji pristup u pokretanju
elektrinih motora. Kako je za potrebe razvijanja velikih brzina
potrebno smanjiti otpore koji se opiru kretanju, inenjeri su
pristupili reavanju ovog problema. Posebnu panju je trebalo
obratiti na stalne otpore pri kretanju (u leajevima, usled
kotrljanja pogonskog toka i usled otpora vazduha) i na povremene
otpore kretanja (otpore u krivini i otpore pri usponu).Otpor
vazduha je umanjen time to su vozila konstruisana tako da budu
podesnih oblika i malih koeficijenta trenja za vazduh. Reenje za
ostale otpore je vieno u primeni magnetne levitacije. Dok kod
obinih elektrinih motora imamo statini deo, stator i rotirajui deo,
rotor kod takozvanih linearnih motora zasnovanih na MAGLEV
tehnologiji nita ne rotira. Ipak vozilo pokretano na ovaj pogon se
itekako kree. Ne postoji bre prevozno sredstvo u kopnenom saobraaju
od MAGLEV voza.
Novi elezniki sistemi omoguavaju visok stepen sigurnosti i
komfora putnika, zadovoljavaju ekoloke standarde, ne zagauju
okolinu, tihi su. Bezkontaktna tehnologija ovih vozova je takoe
veoma ekonomina zato to nema habanja i trenja. Zahteva veoma malu
koliinu energije. Takoe, upravljaki trokovi su manji od trokova kod
tradicionalnih eleznikih sistema. Dok su trokovi izgradnje skoro
isti. Udobno putovanje omoguava krae vreme putovanja i nije
preterano skupo.
MAGLEV voz je najbitnija inovacija u eleznikom saobraaju jo od
konstrukcija prvih eleznica. Super brzi maglev sistemi nemaju
tokove. Oni koristi bezkontaktnu tehnologiju za levitaciju,
upravljanje i vuu, nehabajuu elektroniku umesto mehanikih sistema.
Nema tokove, prenosne mehanizme, reduktore, zupanike, osovine kao
ni pantograf.
Glavne karakteristike maglev sistema su: Lebdenje bez kontakta i
bez trenja, tehnologija voenja i pogona koja je nezavisna od
trenja; Sinhroni uzduni linearni motor integrisan u voicu; Visok
nivo sigurnosti i komfor pri svim brzinama putovanja; Visoka mo
ubrzanja i koenja; Fleksibilno podeavanje ruta voice zahvaljujui
malom preniku zakrivljenosti i visokom stepenu sposobnosti penjanja
(10%); Nizak nivo buke; Niski utroci energije i mali operativni
trokovi.
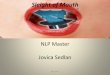
Tehnologija
Slika 3. Transrapid, presek voza
MAGLEV voz je tii, ekonominiji i troi manje energije od bilo kog
drugog eleznikog sistema. Praktino, ne postoji mogunost da voz
ispadne iz ina, a udobnost je vrhunska pri svim brzinama. Voica
puta zahteva manje prostora od standardnih pruga i moe se
fleksibilno podeavati kako bi se prilagodila postojeim prirodnim
predelima i terenu. Za pogon se koristi linearni motor. Sinhroni
uzduni linearni motor slui i kao sistem za vonju i kao sistem za
koenje. Linearni motor radi na istom principu kao i motor sa
obrtnim rotorom. Linearni elektromotor je poseban oblik
elektromotora bez rotirajuih delova, odnosno rotora. Moe se
zamisliti da je klasini motor uzduno prerezan sve do ose rotacije,
te su se onda rotor i stator razvili. Izmeu tako dobijene statorske
i rotorske povrine, umesto obrtnog momenta deluje linearna sila (po
kojoj je nazvan), ijim dejstvom dolazi do linearnog kretanja i
vrenja mehanikog rada. Stator je razvuen preko cele duine pruge.
Naizmenina struja generie magnetno polje koje pokree vozilo bez
kontakta. Magneti koji se nalaze u vozilu imaju ulogu rotora.
Magnetno obrtno polje se prostire samo u jednom smeru, tako se
praktino postie nemogunost sudara. Na jednoj sekciji nalazi se samo
jedan voz koji se kree u datom smeru. Ovakvi vozovi zahtevaju malo
energije, svi sistemi se napajaju iz energije harmoninih oscilacija
magnetskog polja statora linearnog motora koji se nalazi na pruzi.
U sluaju prekida napajanja vozovi su snabdeveni baterijama koji
odravaju levitaciju odreeno vreme. Voz se ne oslanja na ine ve
preko visoko pouzdanog, elektronskog sistema kontrole lebdi na
prosenom rastojanju od oko 10 mm od njegovih voica. Rastojanje
izmeu vrha voice i donje strane vozila tokom lebdenja je 150 mm, to
za posledicu ima tu prednost da pree i preko nekih sitnijih
objekata ili sloja snega.
Sistem levitacijeMAGLEV funkcionie po principu elektromagnetnog
lebdenja. Koriste se sile privlaenja izmeu individualnih,
elektronski kontrolisanih elektromagneta u samom vozilu i
feromagnetske reakcije ina koje su instalirane na donjoj strani
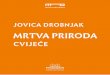
voica. Magneti oslonci podiu vozilo na gore sve do voica, dok ga
magneti za voenje dre bono na trakama (Slika 4.). Magneti
oslanjanja i voenja su postavljeni sa obe strane du cele duine
vozila (Slika 5.). Sistem levitacije je napajan baterijama u vozilu
koji je nezavisan od vunog sistema. Vozilo moe da lebdi do jednog
asa bez eksternog napajanja. U toku vonje baterije za levitaciju se
dopunjuju.
Slika 4. Poloaj magneta
Slika 3.1.2 Presek voza sa poloajem magneta za voenje i
potporu
PogonLinearni motor maglev sistema se koristi kako za vuu tako i
koenje. Brzina moe biti konstantno regulisana menjanjem frekvencije
struje. Ako je pravac kretanja obrnut, motor postaje generator koji
koi vozilo bez kontakta. Elektrina energija moe biti
rekuperirana.
Slika 6. Putujue vuno polje
VozilaMAGLEV vozovi su fleksibilno napravljeni kako bi
zadovoljili razne primene. Delovi voza (vagoni) su napravljeni od
lake, modularne konstrukcije i mogu se kombinovati u vozove poevi
od bar dve sekcije sa po proseno 90 sedita. Zavisno od zahteva
saobraaja mogue je sastaviti i do 10 sekcija (Slika 7). Pored
putnika, mogu se prevoziti i visokovrednovani kargo teret u
specijalno projektovanim kargo delovima vagona. Teina prenesenog
tereta moe biti do 15t. Ovi delovi se mogu koristiti za specijalne
super-brze kargo vozove ili se mogu prikljuiti na putnike vozove i
na taj nain formirati kombinovani servis. Ovi vozovi su
konstruisani sa znaajnim akcentom na aerodinamici. Zbog toga
postoje vrlo male vazdune turbulencije kada proe pored vas.
Distribucija pritiska kroz samo vozilo i njegov uticaj na nadolazee
vozilo je sraunata na osnovu metoda razvijenih u aeronautikoj
industriji. Komfor putovanja nije naruen ak ni kada se dva vozila
mimoilaze jer je unutranjost zaptivena za spoljanji pritisak.
Slika 7. Izgled sekcija
TrasaPoto ovi vozovi lebde iznad zemlje, koliina zemljanih
radova koja je potrebna za temelje voica zavisi od lokalnih uslova
zemljita. Stubovi trase mogu biti montirani ili na zemlji, ili pak
na tankim elinim ili betonskim stubovima (Slika 8). U svim
sluajevima, temelji lee otprilike 30 cm ispod povrine. Sa svojim
parametrima fleksibilnog postavljanja rute i putanje, ove voice
mogu se prilagoditi izgledu okolne sredine i pejzau. Zbog toga su
tuneli retko i potrebni, ak i na brdovitim terenima.
Slika 3.4 Dimenzije trase
NapajanjePodstanice koje sadre sve potrebne komponente za pogon,
napajanje i operacioni sistem su vaan deo Maglev tehnologije.
Maksimalna razdaljina izmedju dve podstanice na trasi je 50km. Ali
stvarna razdaljina zavisi od izgleda i topologije trase.
1.Visokonaponsko razvodno postrojenje sa visokonaponskim
transformatorom
Slika 9. Povezivanje na VN prenosnu mreu
Ovakav pogon je preko svog glavnog transformatora povezan na
visokonaponsku prenosnu mreu (Slika 9.).2. Ulazni razvodni
ureaj
Slika 10. Ulazni razvodni ureaj
Povezuje tranformatore pretvaraa na sabirnice srednjeg napona i
ima sopstvenu kontrolu (Slika 10.). 3. Linijski ispravljai
Slika 11. Linijski ispravljai
Ispravljai kovertuju trofazni napon napajanja u jednosmerni
napon (Slika 11.). Oni su napravljeni tako da mogu preko
samokontrolisanih poluprovodnikih elemenata po potrebi vraati
energiju u mreu.
4. Sistem za hlaenje pretvaraa
Slika 12. Oprema za hlaenje pretvaraa
Pretvarai su hlaeni vodom kako bi se ostvarilo to efikasnije
hlaenje. Sistem za hlaenje pretvaraa disipira toplotu izgubljenu u
poluprovodnicima (Slika 12.). 5. Motorni invertor
Slika 13. Izgled invertora
U motornom invertoru (Slika 13.) jednosmerni napon sa DC linka
prevodi se u odgovarajui naizmenini, potrebne odnosno zahtevane
frekvencije i napona. Kao takav se prosleuje na trasu preko
izlaznog transformatora. Jednosmerni napon se konvertuje tako da se
obezbedi varijabilan napon i frekvencija koji su kao takvi potrebni
za napajanje motora. Takav se dovodi na trasu preko izlaznog
transformatora. Ovi invertori sadre sam okontroli sane
poluprovodnike elemente - IGCT (Integrated Gate Commutated
Thyristors) tiristore. 6.Izlazni transformator
Slika 14. Izlazni trafo
Izlazni transformator (Slika 14.) dovodi napon invertora na
trasu. Transformator je konstruisan da moe da radi kako sa niskim,
tako i sa visokim uestanostima. 7. Sistem kontrole pogona (PRC)
Slika 15. Orman sa opremom za PRC
Srce MAGLEV pogonskog sistema (Slika 15.) je tzv. Propulsion
control system (PRC). Kao kontrolni sistem odgovoran je za korektno
funkcionisanje pogonskog sistema. Bazine funkcije su mu kontrola
vozila, kontrola napajanja preko transvektorskog principa i
kontrola voica. 8. Linijski prekidai
Slika 16. Linijski prekidai
20kV vakuumski kontaktori su integrisani u linijske prekidae
(Slika 16.).Oni su specijalno razvijeni da zadovolje visoke zahteve
u pogledu dielektrine vrstoe, uestanosti prekidanja i jaine
struje.
9. Prekidaka stanica Prekidake stanice (Slika 17.) du trase
osiguravaju da je sekcija na koju vozilo nailazi, odnosno koju
naputa, prikljuena odnosno iskljuena sa napajanja (Slika 18.).
Zatitna oprema kablovskog sistema je takoe integrisana u toj
stanici.
Slika 17. Izgled prekidake stanice
Slika 18. Napajanje sekcija
Slika 3.5.11 Principska ema napajanja trase Transrapid-a