Embed Size (px)
Citation preview

http://support.automation.siemens.com/WW/view/de/108986658
FAQ 09/2014
Linearmotoren LinMotP10-70 an SINAMICS S120 inBetrieb nehmenS120 CONTROL UNIT CU320 / SIMOTION DRIVE-BASED CONTROL UNIT
IBS LinMot P10-70 an SINAMICSBeitrags-ID: 108986658, V1.3, FAQ-03UQCU8S, 09/2014 2
Siem
ens
AG20
14Al
lrig
hts
rese
rved
Dieser Beitrag stammt aus dem Siemens Industry Online Support. Es gelten diedort genannten Nutzungsbedingungen (www.siemens.com/nutzungsbedingungen).
Security-hinweise
Siemens bietet Produkte und Lösungen mit Industrial Security-Funktionen an,die den sicheren Betrieb von Anlagen, Lösungen, Maschinen, Geräten und/oderNetzwerken unterstützen. Sie sind wichtige Komponenten in einemganzheitlichen Industrial Security-Konzept. Die Produkte und Lösungen vonSiemens werden unter diesem Gesichtspunkt ständig weiterentwickelt. Siemensempfiehlt, sich unbedingt regelmäßig über Produkt-Updates zu informieren.
Für den sicheren Betrieb von Produkten und Lösungen von Siemens ist eserforderlich, geeignete Schutzmaßnahmen (z. B. Zellenschutzkonzept) zuergreifen und jede Komponente in ein ganzheitliches Industrial Security-Konzeptzu integrieren, das dem aktuellen Stand der Technik entspricht. Dabei sind aucheingesetzte Produkte von anderen Herstellern zu berücksichtigen.Weitergehende Informationen über Industrial Security finden Sie unterhttp://www.siemens.com/industrialsecurity.
Um stets über Produkt-Updates informiert zu sein, melden Sie sich für unserenproduktspezifischen Newsletter an. Weitere Informationen hierzu finden Sieunter http://support.automation.siemens.com.
Inhaltsverzeichnis1 Aufgabe............................................................................................................... 3
2 Lösung ................................................................................................................ 4
3 Anschlußschema Motorleitung ........................................................................ 6
4 Anschluß Geberleitung an SMC ....................................................................... 7
5 Anschluß Geberleitung an SME ....................................................................... 8
6 Achse Anlegen ................................................................................................... 9
7 Konfigurationsskript ....................................................................................... 12
8 Motordaten ....................................................................................................... 16
9 Parametrierung Temperaturfühler ................................................................. 19
10 Parametrierung i²T-Modell .............................................................................. 20
11 Kontrolle der Grenz- und Bezugswerte ......................................................... 21
12 Optimierung des Stromreglers ....................................................................... 22
13 Optimierung des Geschwindigkeitsreglers .................................................. 23
14 Dokument-Historie ........................................................................................... 24

1 Aufgabe
IBS LinMot P10-70 an SINAMICSBeitrags-ID: 108986658, V1.3, FAQ-03UQCU8S, 09/2014 3
Siem
ens
AG20
14Al
lrig
hts
rese
rved
1 Aufgabe
Dieses Dokument beschreibt die Motorinbetriebnahme von Linearmotoren derFirma LinMot Serie P10-70 an einem Siemens FrequenzumrichterSINAMICS S120, wie er in den Gerätevarianten SIMOTION D4xx-2 bzw.SINAMICS CU320-2 verfügbar ist.
2 Lösung
IBS LinMot P10-70 an SINAMICSBeitrags-ID: 108986658, V1.3, FAQ-03UQCU8S, 09/2014 4
Siem
ens
AG20
14Al
lrig
hts
rese
rved
2 LösungAbgrenzung
Dieses Dokument enthält keine Beschreibung von: Allgemeinem Vorgehen bei einer Antriebsoptimierung Einbindung des Antriebes als technologische Achse in SIMOTION sicherheitsbezogenen Parametrierungen des SINAMICS Einsatz einer Achserweiterungsbaugruppe SINAMICS CX32-2
Vorausgesetzte KenntnisseGrundlegende Kenntnisse über die Arbeit mit SCOUT/STARTER undSIMOTION/SINAMICS S120 werden vorausgesetzt.
Diese Applikation ist gültig für SCOUT 4.2 oder höher STARTER 4.2 oder höher SINAMICS S120 FW 4.6.0.3 oder höher Konfigurationsskript LinMotAuswahl.txt Version 1.3
Die Applikation wurde mit den nachfolgenden Komponenten getestet: SCOUT 4.3.1.17 D445-2 DP/PN mit Version 4.3 SINAMICS-FW 4.5.0.6;
Bestell-Nr. 6AU1445-2AD00-0AA0 Regelungsbaugruppe CU320-2 PN SINAMICS-FW 4.6.0.3;
Bestell-Nr. 6SL3040-1MA01-0Axx Geberauswertung SMC20; Bestell-Nr. 6SL3055-0AA0-5Bxx Leistungsteil Single Motor Module 4,8 kW 9,0 A;
Bestell-Nr. 6SL3420-1TE21-0Axx Einspeisung ALM 16 kW Bestell-Nr. 6SL3130-7TE21-6Axx Netzfilter AIM 400V 16 kW Bestell-Nr. 6SL3100-0BE21-6AB0 Linearmotor Linmot P10-70x320U
Die notwendigen Informationen wurden dem aktuellen Datenblatt der Fa. LinMot, demListenhandbuches LH1 sowie dem Gerätehandbuches GH1 SINAMICS S120 entnommen.
Zur Baureihe LinMot P10-70 gehören die Baugrößen 80, 160, 240, 320 und 400.
Zu jeder Baugröße ist aus drei möglichen Kühlungsarten zu wählen:1. Wasserkühlung2. Fremdbelüftet (Lüfterkühlung)3. Selbstkühlung (passive Kühlung)

2 Lösung
IBS LinMot P10-70 an SINAMICSBeitrags-ID: 108986658, V1.3, FAQ-03UQCU8S, 09/2014 5
Siem
ens
AG20
14Al
lrig
hts
rese
rved
Für die Inbetriebnahme als Linearmotor ist es erforderlich, abhängig von Baugröße und Küh-lungsart eine Reihe von Antriebsparametern anzupassen. Diese Änderungen betreffeninsbesondere Motormodell und Geberkonfiguration und könnten einfach manuell odervorzugsweise skriptunterstützt eingegeben werden.
3 Anschlußschema Motorleitung
IBS LinMot P10-70 an SINAMICSBeitrags-ID: 108986658, V1.3, FAQ-03UQCU8S, 09/2014 6
Siem
ens
AG20
14Al
lrig
hts
rese
rved
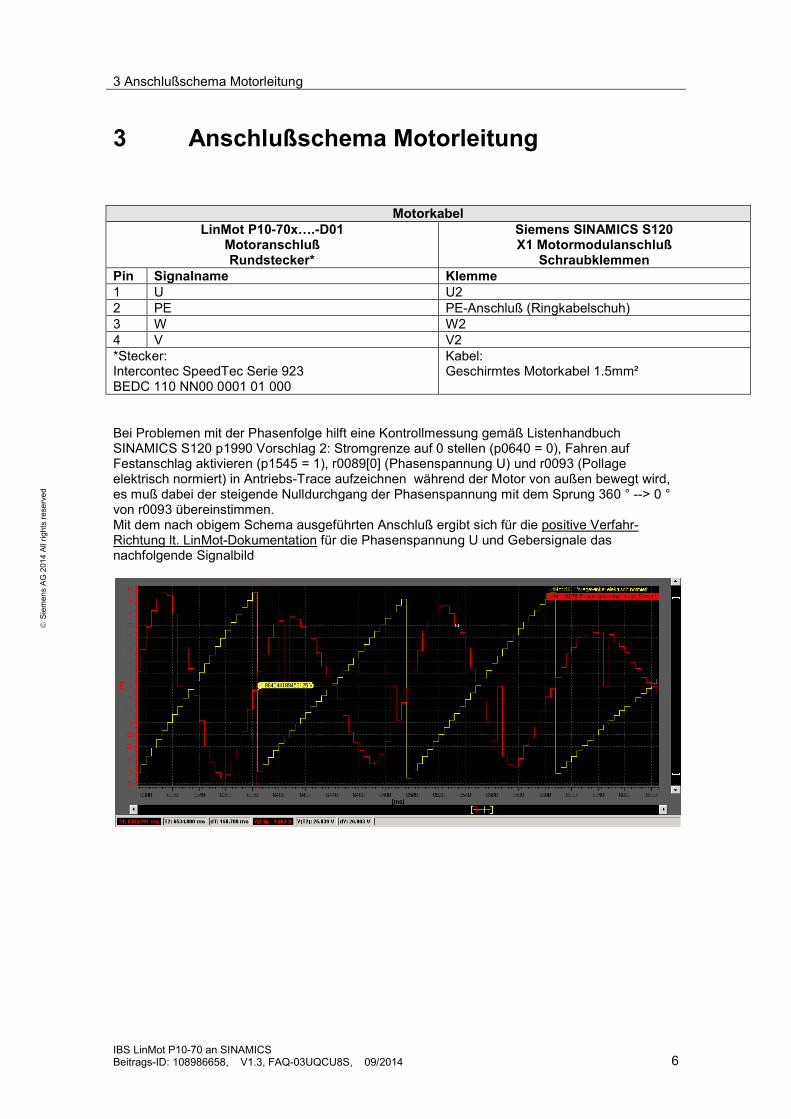
3 Anschlußschema Motorleitung
MotorkabelLinMot P10-70x….-D01
MotoranschlußRundstecker*
Siemens SINAMICS S120X1 Motormodulanschluß
SchraubklemmenPin Signalname Klemme1 U U22 PE PE-Anschluß (Ringkabelschuh)3 W W24 V V2*Stecker:Intercontec SpeedTec Serie 923BEDC 110 NN00 0001 01 000
Kabel:Geschirmtes Motorkabel 1.5mm²
Bei Problemen mit der Phasenfolge hilft eine Kontrollmessung gemäß ListenhandbuchSINAMICS S120 p1990 Vorschlag 2: Stromgrenze auf 0 stellen (p0640 = 0), Fahren aufFestanschlag aktivieren (p1545 = 1), r0089[0] (Phasenspannung U) und r0093 (Pollageelektrisch normiert) in Antriebs-Trace aufzeichnen während der Motor von außen bewegt wird,es muß dabei der steigende Nulldurchgang der Phasenspannung mit dem Sprung 360 ° --> 0 °von r0093 übereinstimmen.Mit dem nach obigem Schema ausgeführten Anschluß ergibt sich für die positive Verfahr-Richtung lt. LinMot-Dokumentation für die Phasenspannung U und Gebersignale dasnachfolgende Signalbild
4 Anschluß Geberleitung an SMC
IBS LinMot P10-70 an SINAMICSBeitrags-ID: 108986658, V1.3, FAQ-03UQCU8S, 09/2014 7
Siem
ens
AG20
14Al
lrig
hts
rese
rved
4 Anschluß Geberleitung an SMC
LinMot P10-70x….-D01GeberanschlußRundstecker*
Siemens SMC20Gebermodulanschluß
DSUB 25Pin Signalname Aderfarbe Pin Signalname1 3…13 VDC weiß 1 P-Encoder2 GND braun 2 M-Encoder3 Supply Sense +5V grün 14 P-Sense4 Supply Sense GND gelb 16 M-Sense5 n.c.6 n.c.7 Sin+ grau 7 B*8 Sin - rosa 6 B9 Cos+ blau 4 A*10 Cos- rot 3 A11 Ref.+ schwarz 17 R12 Ref.- lila 18 R*13 Hall U grau/rosa14 Hall V rot/blau15 Hall W weiß/grün16 Temp+ gb/bn od. bn/gn 13 +Temp17 Temp- weiß/gelb 25 -Temp
n.c. gb/bn od. bn/gn
*Stecker :IntercontecSpeedTec, Serie 617,AEDA 874 NN00 0005 1A 000
Geberleitung:doppelt geschirmt mit paarweise verdrilltenDoppeladern
5 Masse Innerer Schirm (A/A*)8 Masse Innerer Schirm (B/B*)9 Reserviert, nicht belegen10 Clock (Takt EnDat, SSI)11 Reserviert, nicht belegen12 Clock* (Takt EnDat, SSI)15 Data (Daten EnDat, SSI)19 C20 C*21 D22 D*23 Data* (Daten EnDat, SSI)24 Masse Innerer Schirm
(R/R*)
5 Anschluß Geberleitung an SME
IBS LinMot P10-70 an SINAMICSBeitrags-ID: 108986658, V1.3, FAQ-03UQCU8S, 09/2014 8
Siem
ens
AG20
14Al
lrig
hts
rese
rved
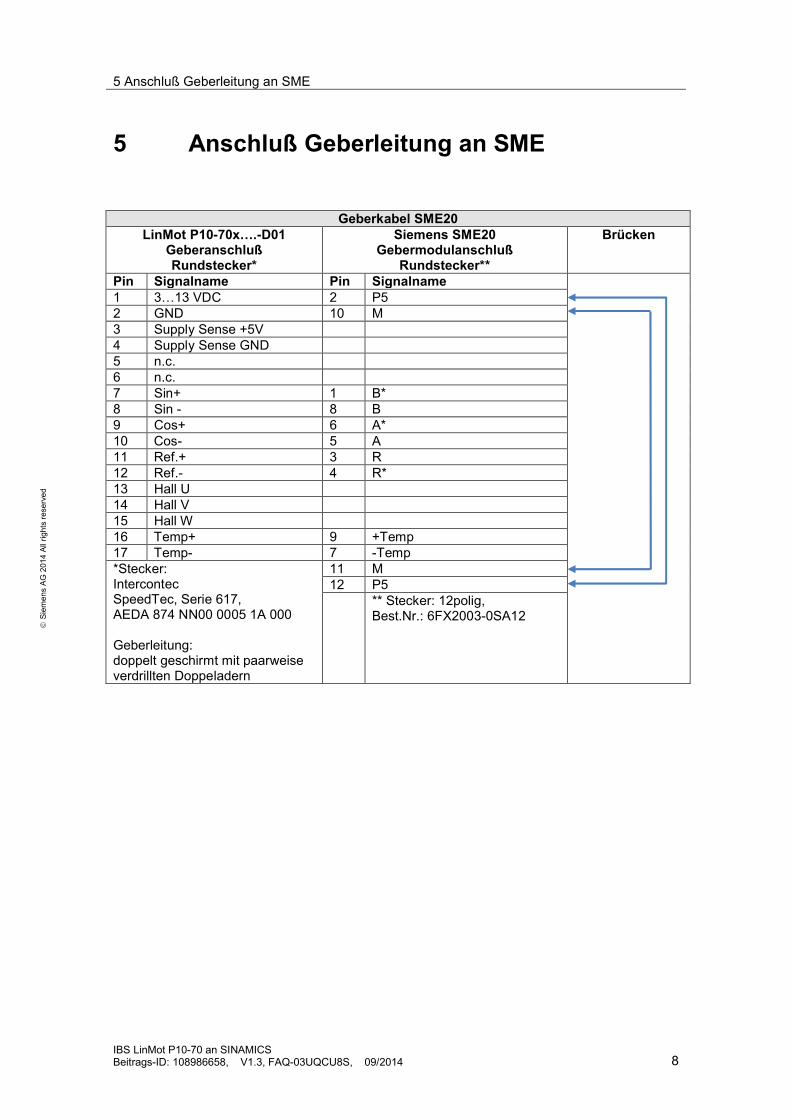
5 Anschluß Geberleitung an SME
Geberkabel SME20LinMot P10-70x….-D01
GeberanschlußRundstecker*
Siemens SME20Gebermodulanschluß
Rundstecker**
Brücken
Pin Signalname Pin Signalname1 3…13 VDC 2 P52 GND 10 M3 Supply Sense +5V4 Supply Sense GND5 n.c.6 n.c.7 Sin+ 1 B*8 Sin - 8 B9 Cos+ 6 A*10 Cos- 5 A11 Ref.+ 3 R12 Ref.- 4 R*13 Hall U14 Hall V15 Hall W16 Temp+ 9 +Temp17 Temp- 7 -Temp*Stecker:IntercontecSpeedTec, Serie 617,AEDA 874 NN00 0005 1A 000
Geberleitung:doppelt geschirmt mit paarweiseverdrillten Doppeladern
11 M12 P5
** Stecker: 12polig,Best.Nr.: 6FX2003-0SA12
6 Achse Anlegen
IBS LinMot P10-70 an SINAMICSBeitrags-ID: 108986658, V1.3, FAQ-03UQCU8S, 09/2014 9
Siem
ens
AG20
14Al
lrig
hts
rese
rved
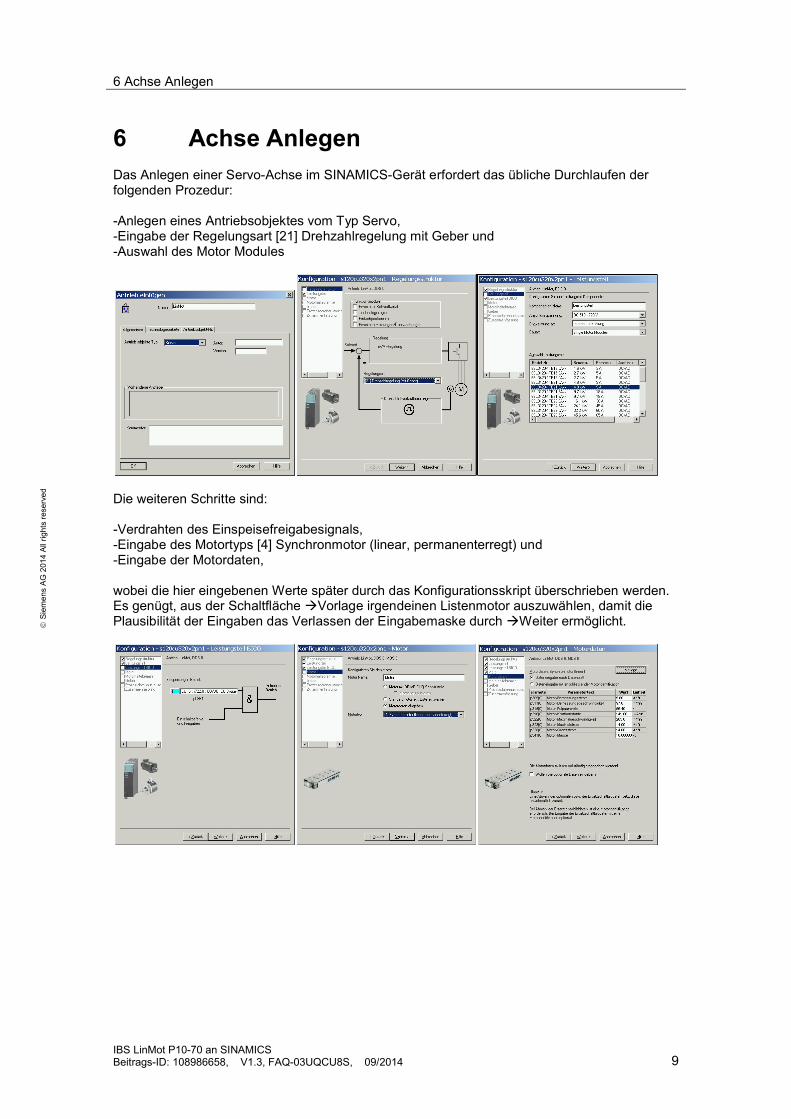
6 Achse AnlegenDas Anlegen einer Servo-Achse im SINAMICS-Gerät erfordert das übliche Durchlaufen derfolgenden Prozedur:
-Anlegen eines Antriebsobjektes vom Typ Servo,-Eingabe der Regelungsart [21] Drehzahlregelung mit Geber und-Auswahl des Motor Modules
Die weiteren Schritte sind:
-Verdrahten des Einspeisefreigabesignals,-Eingabe des Motortyps [4] Synchronmotor (linear, permanenterregt) und-Eingabe der Motordaten,
wobei die hier eingebenen Werte später durch das Konfigurationsskript überschrieben werden.Es genügt, aus der Schaltfläche Vorlage irgendeinen Listenmotor auszuwählen, damit diePlausibilität der Eingaben das Verlassen der Eingabemaske durch Weiter ermöglicht.
6 Achse Anlegen
IBS LinMot P10-70 an SINAMICSBeitrags-ID: 108986658, V1.3, FAQ-03UQCU8S, 09/2014 10
Siem
ens
AG20
14Al
lrig
hts
rese
rved
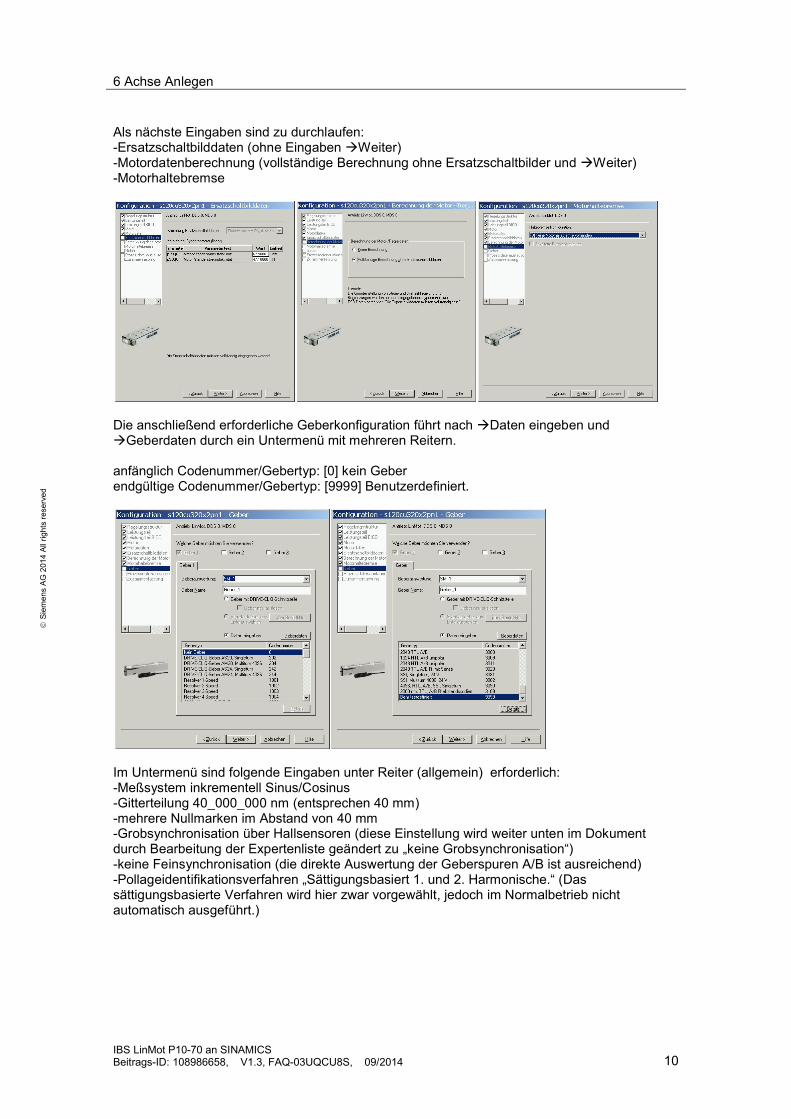
Als nächste Eingaben sind zu durchlaufen:-Ersatzschaltbilddaten (ohne Eingaben Weiter)-Motordatenberechnung (vollständige Berechnung ohne Ersatzschaltbilder und Weiter)-Motorhaltebremse
Die anschließend erforderliche Geberkonfiguration führt nach Daten eingeben undGeberdaten durch ein Untermenü mit mehreren Reitern.
anfänglich Codenummer/Gebertyp: [0] kein Geberendgültige Codenummer/Gebertyp: [9999] Benutzerdefiniert.
Im Untermenü sind folgende Eingaben unter Reiter (allgemein) erforderlich:-Meßsystem inkrementell Sinus/Cosinus-Gitterteilung 40_000_000 nm (entsprechen 40 mm)-mehrere Nullmarken im Abstand von 40 mm-Grobsynchronisation über Hallsensoren (diese Einstellung wird weiter unten im Dokumentdurch Bearbeitung der Expertenliste geändert zu „keine Grobsynchronisation“)-keine Feinsynchronisation (die direkte Auswertung der Geberspuren A/B ist ausreichend)-Pollageidentifikationsverfahren „Sättigungsbasiert 1. und 2. Harmonische.“ (Dassättigungsbasierte Verfahren wird hier zwar vorgewählt, jedoch im Normalbetrieb nichtautomatisch ausgeführt.)
6 Achse Anlegen
IBS LinMot P10-70 an SINAMICSBeitrags-ID: 108986658, V1.3, FAQ-03UQCU8S, 09/2014 11
Siem
ens
AG20
14Al
lrig
hts
rese
rved
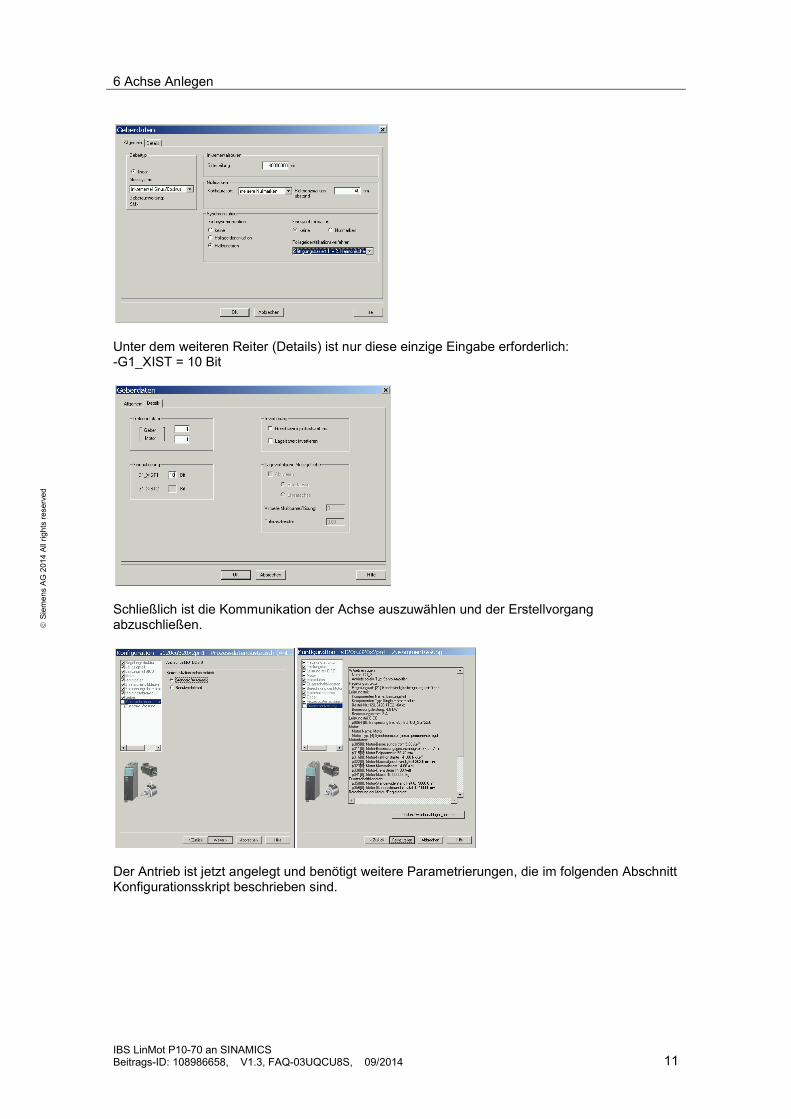
Unter dem weiteren Reiter (Details) ist nur diese einzige Eingabe erforderlich:-G1_XIST = 10 Bit
Schließlich ist die Kommunikation der Achse auszuwählen und der Erstellvorgangabzuschließen.
Der Antrieb ist jetzt angelegt und benötigt weitere Parametrierungen, die im folgenden AbschnittKonfigurationsskript beschrieben sind.
7 Konfigurationsskript
IBS LinMot P10-70 an SINAMICSBeitrags-ID: 108986658, V1.3, FAQ-03UQCU8S, 09/2014 12
Siem
ens
AG20
14Al
lrig
hts
rese
rved
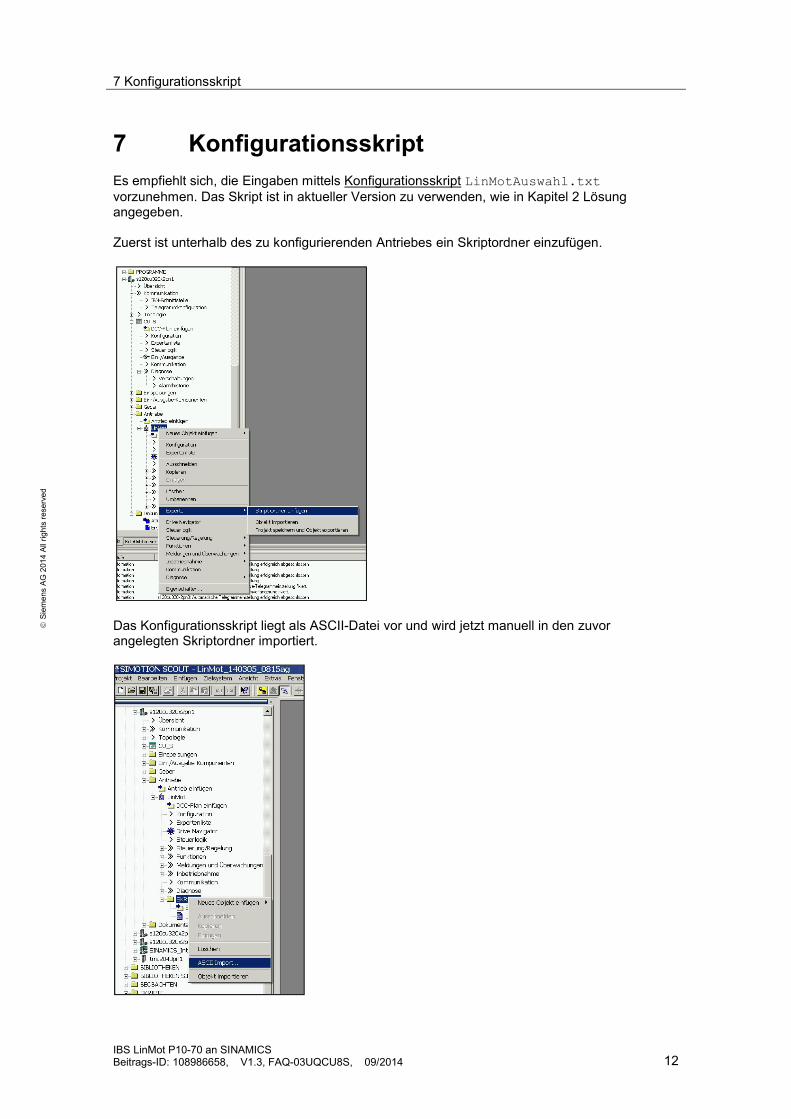
7 KonfigurationsskriptEs empfiehlt sich, die Eingaben mittels Konfigurationsskript LinMotAuswahl.txtvorzunehmen. Das Skript ist in aktueller Version zu verwenden, wie in Kapitel 2 Lösungangegeben.
Zuerst ist unterhalb des zu konfigurierenden Antriebes ein Skriptordner einzufügen.
Das Konfigurationsskript liegt als ASCII-Datei vor und wird jetzt manuell in den zuvorangelegten Skriptordner importiert.
7 Konfigurationsskript
IBS LinMot P10-70 an SINAMICSBeitrags-ID: 108986658, V1.3, FAQ-03UQCU8S, 09/2014 13
Siem
ens
AG20
14Al
lrig
hts
rese
rved
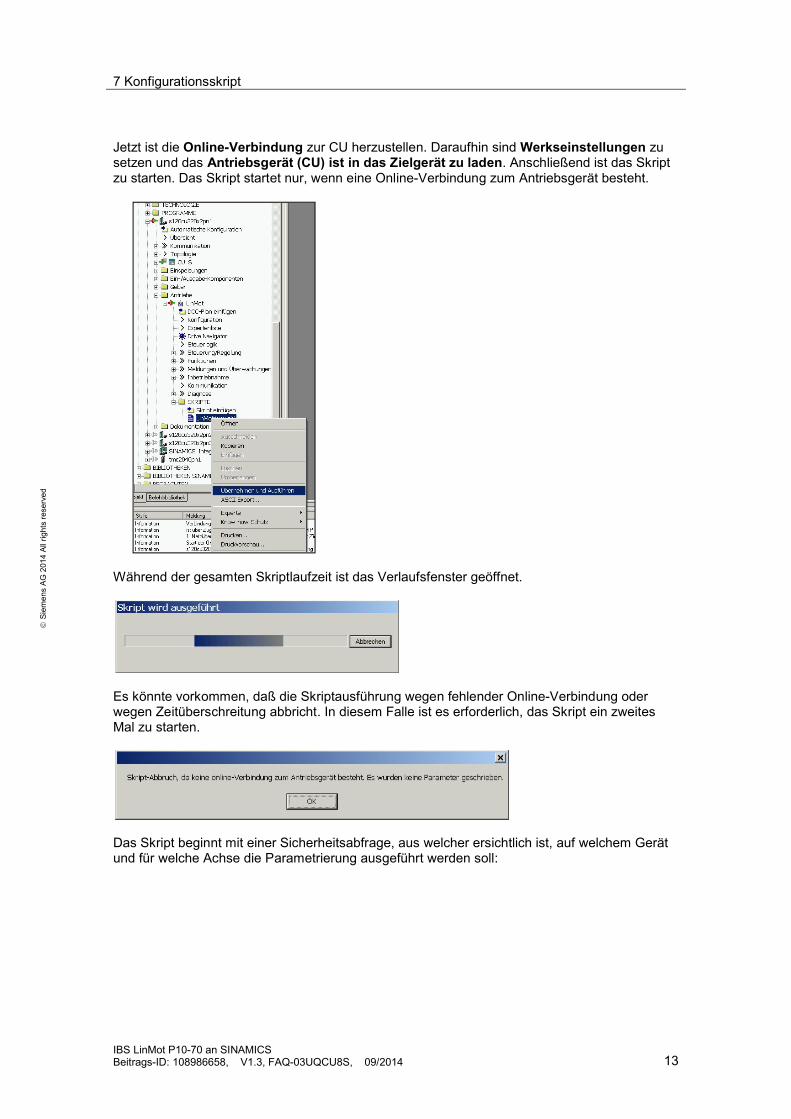
Jetzt ist die Online-Verbindung zur CU herzustellen. Daraufhin sind Werkseinstellungen zusetzen und das Antriebsgerät (CU) ist in das Zielgerät zu laden. Anschließend ist das Skriptzu starten. Das Skript startet nur, wenn eine Online-Verbindung zum Antriebsgerät besteht.
Während der gesamten Skriptlaufzeit ist das Verlaufsfenster geöffnet.
Es könnte vorkommen, daß die Skriptausführung wegen fehlender Online-Verbindung oderwegen Zeitüberschreitung abbricht. In diesem Falle ist es erforderlich, das Skript ein zweitesMal zu starten.
Das Skript beginnt mit einer Sicherheitsabfrage, aus welcher ersichtlich ist, auf welchem Gerätund für welche Achse die Parametrierung ausgeführt werden soll:
7 Konfigurationsskript
IBS LinMot P10-70 an SINAMICSBeitrags-ID: 108986658, V1.3, FAQ-03UQCU8S, 09/2014 14
Siem
ens
AG20
14Al
lrig
hts
rese
rved
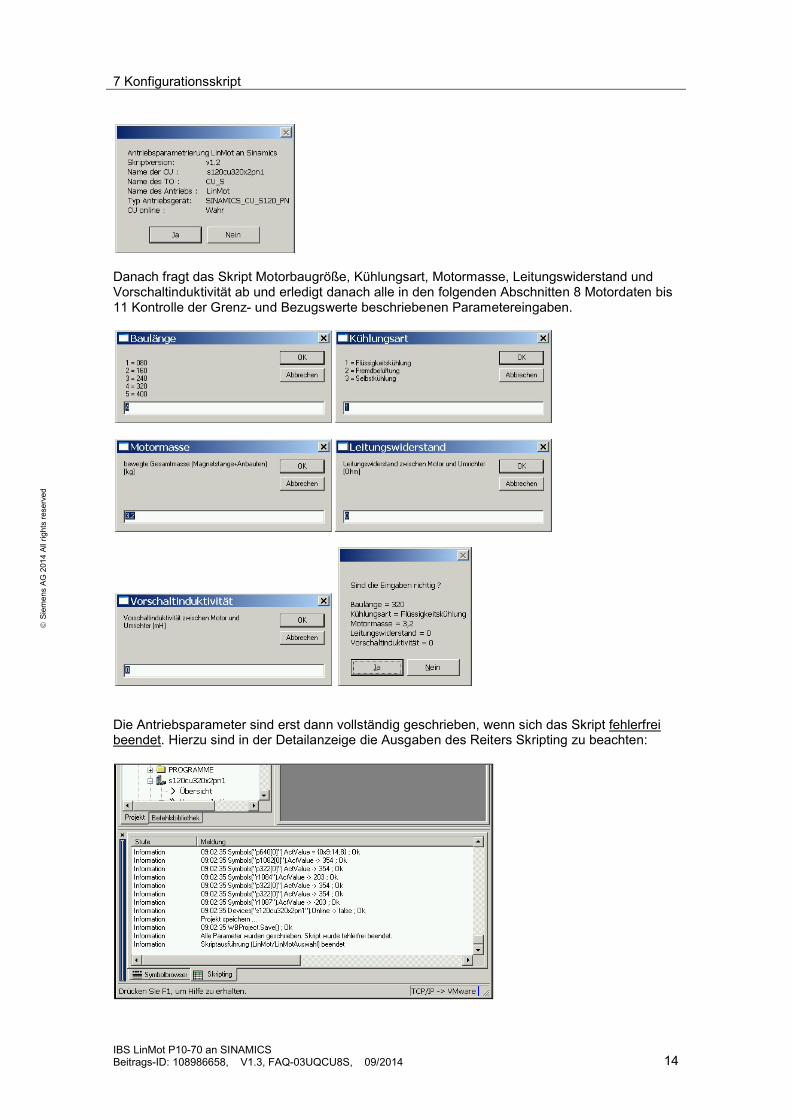
Danach fragt das Skript Motorbaugröße, Kühlungsart, Motormasse, Leitungswiderstand undVorschaltinduktivität ab und erledigt danach alle in den folgenden Abschnitten 8 Motordaten bis11 Kontrolle der Grenz- und Bezugswerte beschriebenen Parametereingaben.
Die Antriebsparameter sind erst dann vollständig geschrieben, wenn sich das Skript fehlerfreibeendet. Hierzu sind in der Detailanzeige die Ausgaben des Reiters Skripting zu beachten:
7 Konfigurationsskript
IBS LinMot P10-70 an SINAMICSBeitrags-ID: 108986658, V1.3, FAQ-03UQCU8S, 09/2014 15
Siem
ens
AG20
14Al
lrig
hts
rese
rved
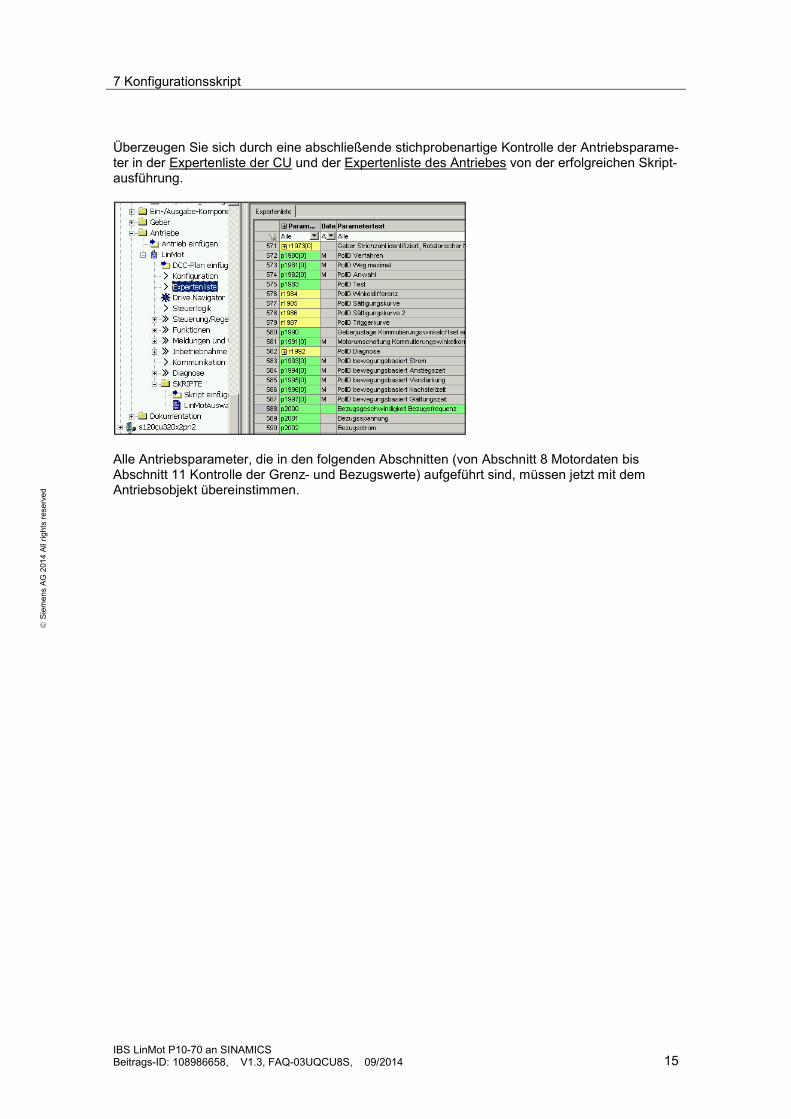
Überzeugen Sie sich durch eine abschließende stichprobenartige Kontrolle der Antriebsparame-ter in der Expertenliste der CU und der Expertenliste des Antriebes von der erfolgreichen Skript-ausführung.
Alle Antriebsparameter, die in den folgenden Abschnitten (von Abschnitt 8 Motordaten bisAbschnitt 11 Kontrolle der Grenz- und Bezugswerte) aufgeführt sind, müssen jetzt mit demAntriebsobjekt übereinstimmen.
8 Motordaten
IBS LinMot P10-70 an SINAMICSBeitrags-ID: 108986658, V1.3, FAQ-03UQCU8S, 09/2014 16
Siem
ens
AG20
14Al
lrig
hts
rese
rved
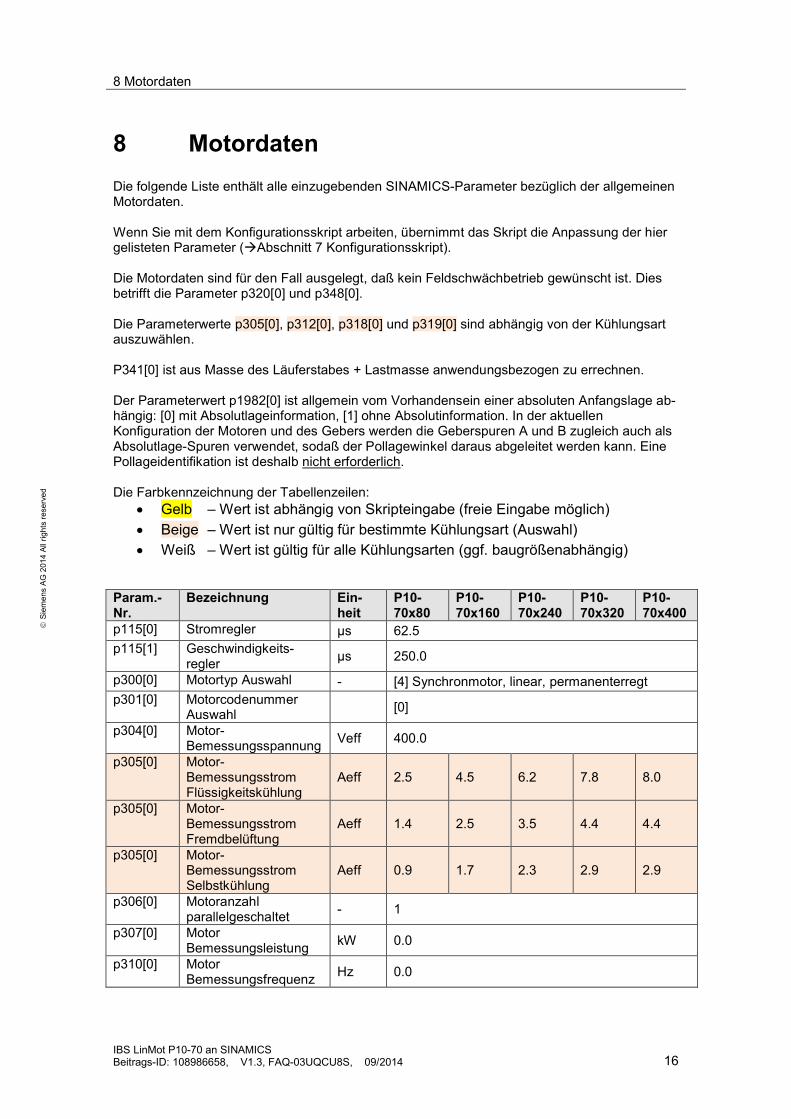
8 MotordatenDie folgende Liste enthält alle einzugebenden SINAMICS-Parameter bezüglich der allgemeinenMotordaten.
Wenn Sie mit dem Konfigurationsskript arbeiten, übernimmt das Skript die Anpassung der hiergelisteten Parameter ( Abschnitt 7 Konfigurationsskript).
Die Motordaten sind für den Fall ausgelegt, daß kein Feldschwächbetrieb gewünscht ist. Diesbetrifft die Parameter p320[0] und p348[0].
Die Parameterwerte p305[0], p312[0], p318[0] und p319[0] sind abhängig von der Kühlungsartauszuwählen.
P341[0] ist aus Masse des Läuferstabes + Lastmasse anwendungsbezogen zu errechnen.
Der Parameterwert p1982[0] ist allgemein vom Vorhandensein einer absoluten Anfangslage ab-hängig: [0] mit Absolutlageinformation, [1] ohne Absolutinformation. In der aktuellenKonfiguration der Motoren und des Gebers werden die Geberspuren A und B zugleich auch alsAbsolutlage-Spuren verwendet, sodaß der Pollagewinkel daraus abgeleitet werden kann. EinePollageidentifikation ist deshalb nicht erforderlich.
Die Farbkennzeichnung der Tabellenzeilen: Gelb – Wert ist abhängig von Skripteingabe (freie Eingabe möglich) Beige – Wert ist nur gültig für bestimmte Kühlungsart (Auswahl) Weiß – Wert ist gültig für alle Kühlungsarten (ggf. baugrößenabhängig)
Param.-Nr.
Bezeichnung Ein-heit
P10-70x80
P10-70x160
P10-70x240
P10-70x320
P10-70x400
p115[0] Stromregler µs 62.5p115[1] Geschwindigkeits-
regler µs 250.0
p300[0] Motortyp Auswahl - [4] Synchronmotor, linear, permanenterregtp301[0] Motorcodenummer
Auswahl [0]
p304[0] Motor-Bemessungsspannung Veff 400.0
p305[0] Motor-BemessungsstromFlüssigkeitskühlung
Aeff 2.5 4.5 6.2 7.8 8.0
p305[0] Motor-BemessungsstromFremdbelüftung
Aeff 1.4 2.5 3.5 4.4 4.4
p305[0] Motor-BemessungsstromSelbstkühlung
Aeff 0.9 1.7 2.3 2.9 2.9
p306[0] Motoranzahlparallelgeschaltet - 1
p307[0] MotorBemessungsleistung kW 0.0
p310[0] MotorBemessungsfrequenz Hz 0.0
8 Motordaten
IBS LinMot P10-70 an SINAMICSBeitrags-ID: 108986658, V1.3, FAQ-03UQCU8S, 09/2014 17
Siem
ens
AG20
14Al
lrig
hts
rese
rved
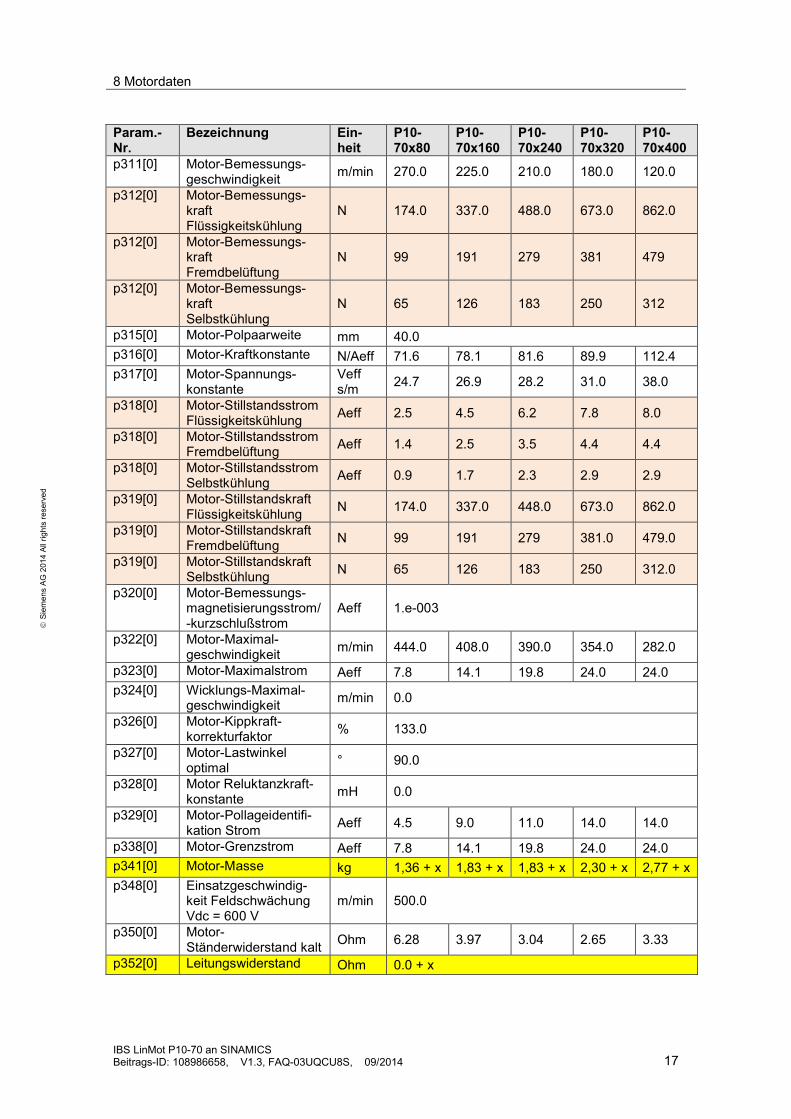
Param.-Nr.
Bezeichnung Ein-heit
P10-70x80
P10-70x160
P10-70x240
P10-70x320
P10-70x400
p311[0] Motor-Bemessungs-geschwindigkeit m/min 270.0 225.0 210.0 180.0 120.0
p312[0] Motor-Bemessungs-kraftFlüssigkeitskühlung
N 174.0 337.0 488.0 673.0 862.0
p312[0] Motor-Bemessungs-kraftFremdbelüftung
N 99 191 279 381 479
p312[0] Motor-Bemessungs-kraftSelbstkühlung
N 65 126 183 250 312
p315[0] Motor-Polpaarweite mm 40.0p316[0] Motor-Kraftkonstante N/Aeff 71.6 78.1 81.6 89.9 112.4p317[0] Motor-Spannungs-
konstanteVeffs/m 24.7 26.9 28.2 31.0 38.0
p318[0] Motor-StillstandsstromFlüssigkeitskühlung Aeff 2.5 4.5 6.2 7.8 8.0
p318[0] Motor-StillstandsstromFremdbelüftung Aeff 1.4 2.5 3.5 4.4 4.4
p318[0] Motor-StillstandsstromSelbstkühlung Aeff 0.9 1.7 2.3 2.9 2.9
p319[0] Motor-StillstandskraftFlüssigkeitskühlung N 174.0 337.0 448.0 673.0 862.0
p319[0] Motor-StillstandskraftFremdbelüftung N 99 191 279 381.0 479.0
p319[0] Motor-StillstandskraftSelbstkühlung N 65 126 183 250 312.0
p320[0] Motor-Bemessungs-magnetisierungsstrom/-kurzschlußstrom
Aeff 1.e-003
p322[0] Motor-Maximal-geschwindigkeit m/min 444.0 408.0 390.0 354.0 282.0
p323[0] Motor-Maximalstrom Aeff 7.8 14.1 19.8 24.0 24.0p324[0] Wicklungs-Maximal-
geschwindigkeit m/min 0.0
p326[0] Motor-Kippkraft-korrekturfaktor % 133.0
p327[0] Motor-Lastwinkeloptimal ° 90.0
p328[0] Motor Reluktanzkraft-konstante mH 0.0
p329[0] Motor-Pollageidentifi-kation Strom Aeff 4.5 9.0 11.0 14.0 14.0
p338[0] Motor-Grenzstrom Aeff 7.8 14.1 19.8 24.0 24.0p341[0] Motor-Masse kg 1,36 + x 1,83 + x 1,83 + x 2,30 + x 2,77 + xp348[0] Einsatzgeschwindig-
keit FeldschwächungVdc = 600 V
m/min 500.0
p350[0] Motor-Ständerwiderstand kalt Ohm 6.28 3.97 3.04 2.65 3.33
p352[0] Leitungswiderstand Ohm 0.0 + x
8 Motordaten
IBS LinMot P10-70 an SINAMICSBeitrags-ID: 108986658, V1.3, FAQ-03UQCU8S, 09/2014 18
Siem
ens
AG20
14Al
lrig
hts
rese
rved
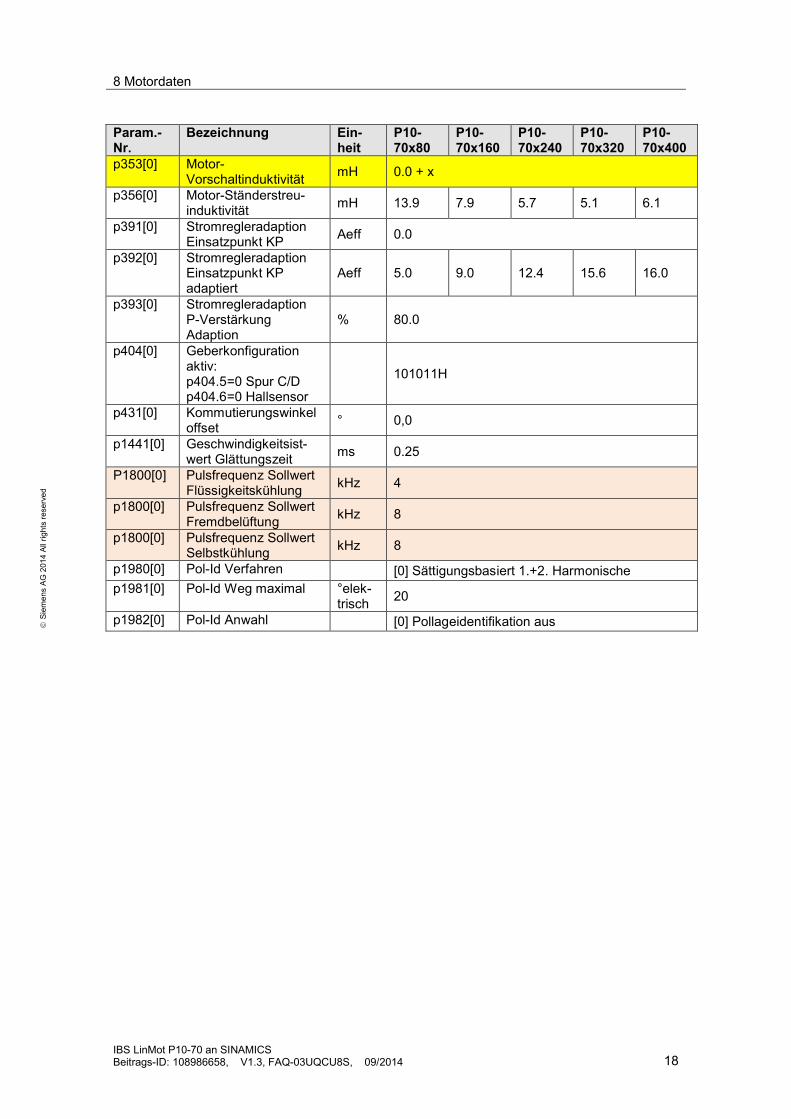
Param.-Nr.
Bezeichnung Ein-heit
P10-70x80
P10-70x160
P10-70x240
P10-70x320
P10-70x400
p353[0] Motor-Vorschaltinduktivität mH 0.0 + x
p356[0] Motor-Ständerstreu-induktivität mH 13.9 7.9 5.7 5.1 6.1
p391[0] StromregleradaptionEinsatzpunkt KP Aeff 0.0
p392[0] StromregleradaptionEinsatzpunkt KPadaptiert
Aeff 5.0 9.0 12.4 15.6 16.0
p393[0] StromregleradaptionP-VerstärkungAdaption
% 80.0
p404[0] Geberkonfigurationaktiv:p404.5=0 Spur C/Dp404.6=0 Hallsensor
101011H
p431[0] Kommutierungswinkeloffset ° 0,0
p1441[0] Geschwindigkeitsist-wert Glättungszeit ms 0.25
P1800[0] Pulsfrequenz SollwertFlüssigkeitskühlung kHz 4
p1800[0] Pulsfrequenz SollwertFremdbelüftung kHz 8
p1800[0] Pulsfrequenz SollwertSelbstkühlung kHz 8
p1980[0] Pol-Id Verfahren [0] Sättigungsbasiert 1.+2. Harmonischep1981[0] Pol-Id Weg maximal °elek-
trisch 20
p1982[0] Pol-Id Anwahl [0] Pollageidentifikation aus
9 Parametrierung Temperaturfühler
IBS LinMot P10-70 an SINAMICSBeitrags-ID: 108986658, V1.3, FAQ-03UQCU8S, 09/2014 19
Siem
ens
AG20
14Al
lrig
hts
rese
rved
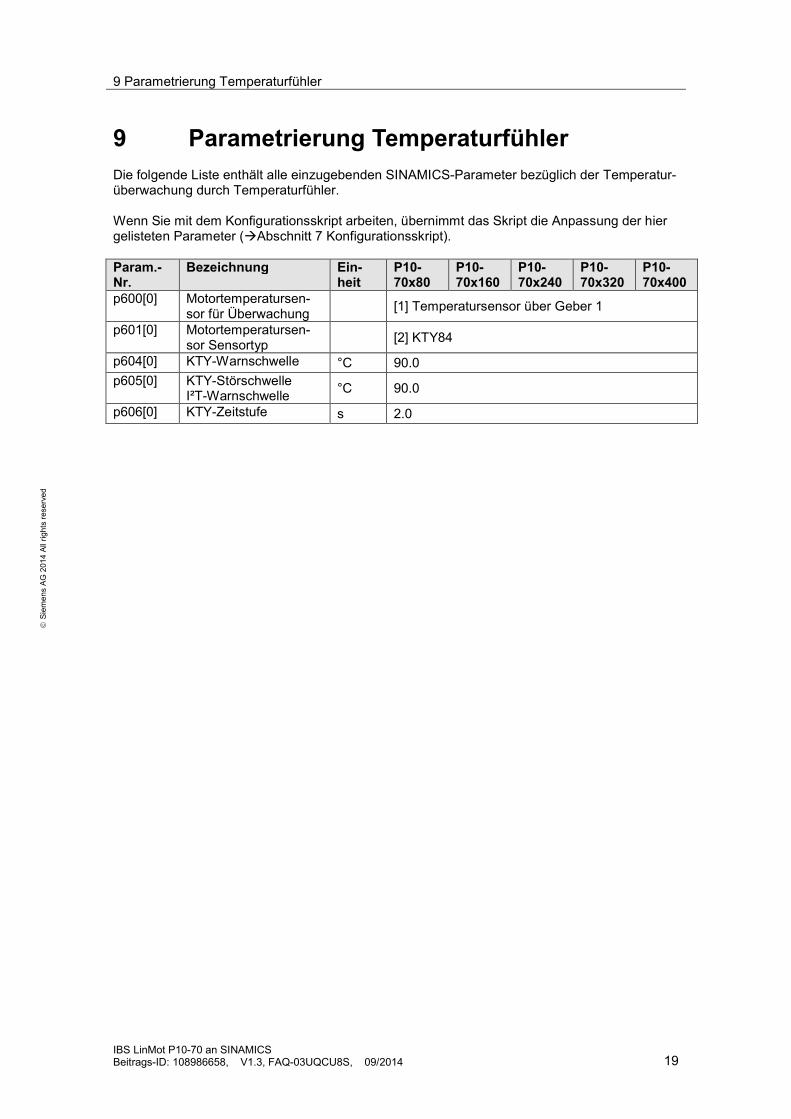
9 Parametrierung TemperaturfühlerDie folgende Liste enthält alle einzugebenden SINAMICS-Parameter bezüglich der Temperatur-überwachung durch Temperaturfühler.
Wenn Sie mit dem Konfigurationsskript arbeiten, übernimmt das Skript die Anpassung der hiergelisteten Parameter ( Abschnitt 7 Konfigurationsskript).
Param.-Nr.
Bezeichnung Ein-heit
P10-70x80
P10-70x160
P10-70x240
P10-70x320
P10-70x400
p600[0] Motortemperatursen-sor für Überwachung [1] Temperatursensor über Geber 1
p601[0] Motortemperatursen-sor Sensortyp [2] KTY84
p604[0] KTY-Warnschwelle °C 90.0p605[0] KTY-Störschwelle
I²T-Warnschwelle °C 90.0
p606[0] KTY-Zeitstufe s 2.0
10 Parametrierung i²T-Modell
IBS LinMot P10-70 an SINAMICSBeitrags-ID: 108986658, V1.3, FAQ-03UQCU8S, 09/2014 20
Siem
ens
AG20
14Al
lrig
hts
rese
rved
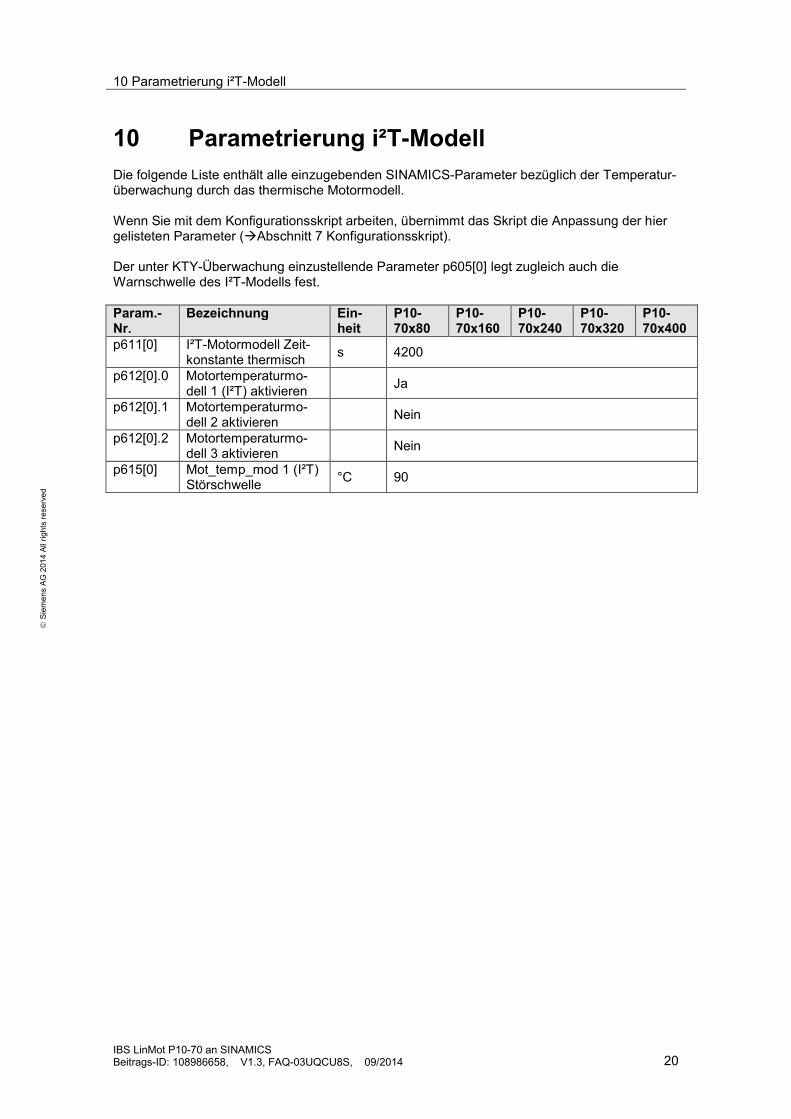
10 Parametrierung i²T-ModellDie folgende Liste enthält alle einzugebenden SINAMICS-Parameter bezüglich der Temperatur-überwachung durch das thermische Motormodell.
Wenn Sie mit dem Konfigurationsskript arbeiten, übernimmt das Skript die Anpassung der hiergelisteten Parameter ( Abschnitt 7 Konfigurationsskript).
Der unter KTY-Überwachung einzustellende Parameter p605[0] legt zugleich auch dieWarnschwelle des I²T-Modells fest.
Param.-Nr.
Bezeichnung Ein-heit
P10-70x80
P10-70x160
P10-70x240
P10-70x320
P10-70x400
p611[0] I²T-Motormodell Zeit-konstante thermisch s 4200
p612[0].0 Motortemperaturmo-dell 1 (I²T) aktivieren Ja
p612[0].1 Motortemperaturmo-dell 2 aktivieren Nein
p612[0].2 Motortemperaturmo-dell 3 aktivieren Nein
p615[0] Mot_temp_mod 1 (I²T)Störschwelle °C 90
11 Kontrolle der Grenz- und Bezugswerte
IBS LinMot P10-70 an SINAMICSBeitrags-ID: 108986658, V1.3, FAQ-03UQCU8S, 09/2014 21
Siem
ens
AG20
14Al
lrig
hts
rese
rved
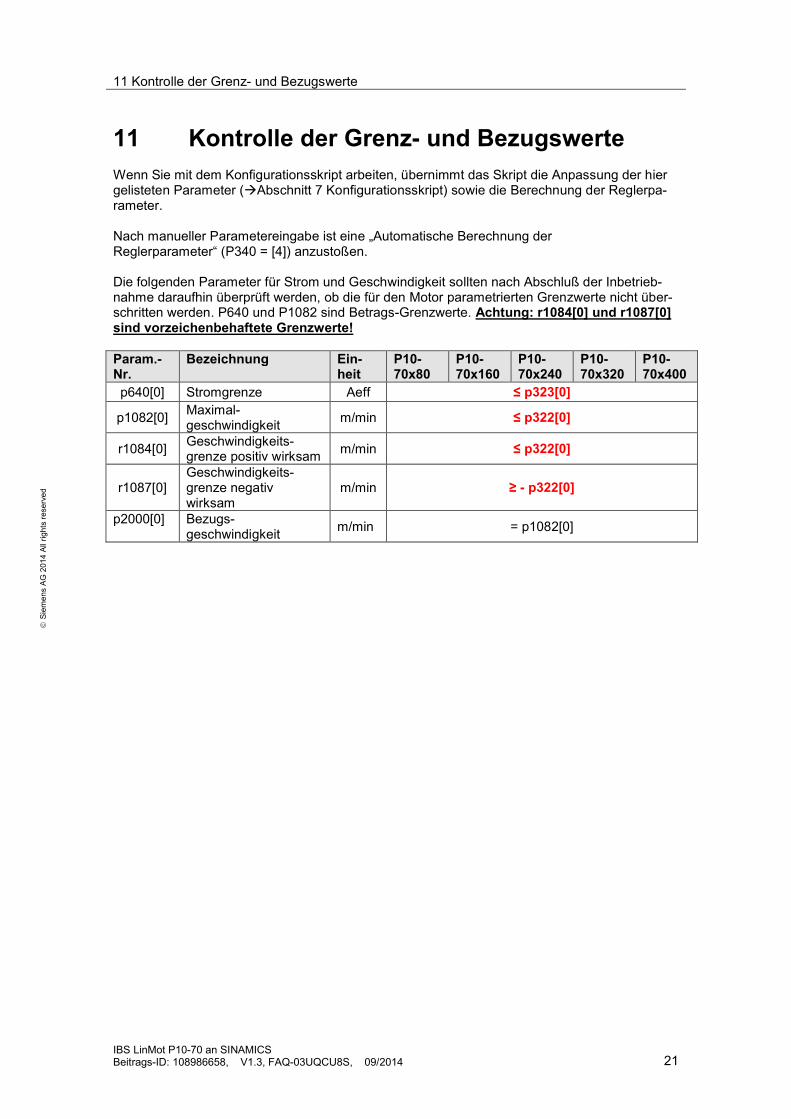
11 Kontrolle der Grenz- und BezugswerteWenn Sie mit dem Konfigurationsskript arbeiten, übernimmt das Skript die Anpassung der hiergelisteten Parameter ( Abschnitt 7 Konfigurationsskript) sowie die Berechnung der Reglerpa-rameter.
Nach manueller Parametereingabe ist eine „Automatische Berechnung derReglerparameter“ (P340 = [4]) anzustoßen.
Die folgenden Parameter für Strom und Geschwindigkeit sollten nach Abschluß der Inbetrieb-nahme daraufhin überprüft werden, ob die für den Motor parametrierten Grenzwerte nicht über-schritten werden. P640 und P1082 sind Betrags-Grenzwerte. Achtung: r1084[0] und r1087[0]sind vorzeichenbehaftete Grenzwerte!
Param.-Nr.
Bezeichnung Ein-heit
P10-70x80
P10-70x160
P10-70x240
P10-70x320
P10-70x400
p640[0] Stromgrenze Aeff p323[0]
p1082[0] Maximal-geschwindigkeit m/min p322[0]
r1084[0] Geschwindigkeits-grenze positiv wirksam m/min p322[0]
r1087[0]Geschwindigkeits-grenze negativwirksam
m/min - p322[0]
p2000[0] Bezugs-geschwindigkeit m/min = p1082[0]
12 Optimierung des Stromreglers
IBS LinMot P10-70 an SINAMICSBeitrags-ID: 108986658, V1.3, FAQ-03UQCU8S, 09/2014 22
Siem
ens
AG20
14Al
lrig
hts
rese
rved
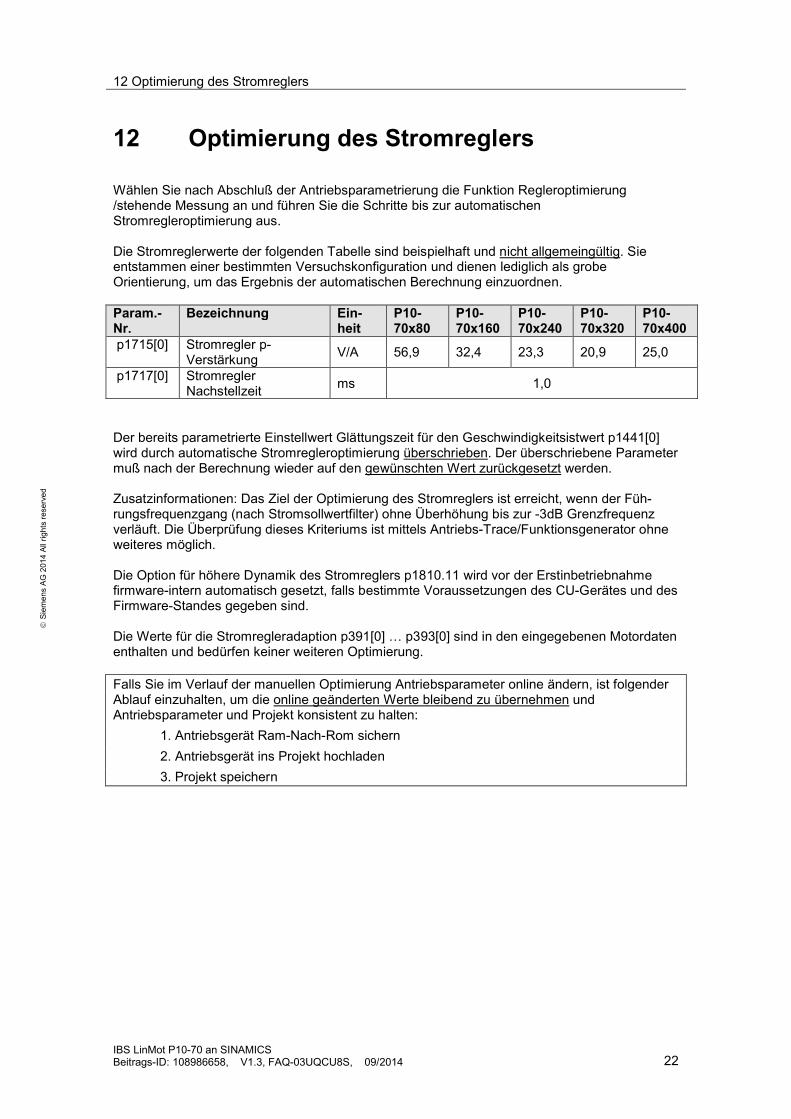
12 Optimierung des Stromreglers
Wählen Sie nach Abschluß der Antriebsparametrierung die Funktion Regleroptimierung/stehende Messung an und führen Sie die Schritte bis zur automatischenStromregleroptimierung aus.
Die Stromreglerwerte der folgenden Tabelle sind beispielhaft und nicht allgemeingültig. Sieentstammen einer bestimmten Versuchskonfiguration und dienen lediglich als grobeOrientierung, um das Ergebnis der automatischen Berechnung einzuordnen.
Param.-Nr.
Bezeichnung Ein-heit
P10-70x80
P10-70x160
P10-70x240
P10-70x320
P10-70x400
p1715[0] Stromregler p-Verstärkung V/A 56,9 32,4 23,3 20,9 25,0
p1717[0] StromreglerNachstellzeit ms 1,0
Der bereits parametrierte Einstellwert Glättungszeit für den Geschwindigkeitsistwert p1441[0]wird durch automatische Stromregleroptimierung überschrieben. Der überschriebene Parametermuß nach der Berechnung wieder auf den gewünschten Wert zurückgesetzt werden.
Zusatzinformationen: Das Ziel der Optimierung des Stromreglers ist erreicht, wenn der Füh-rungsfrequenzgang (nach Stromsollwertfilter) ohne Überhöhung bis zur -3dB Grenzfrequenzverläuft. Die Überprüfung dieses Kriteriums ist mittels Antriebs-Trace/Funktionsgenerator ohneweiteres möglich.
Die Option für höhere Dynamik des Stromreglers p1810.11 wird vor der Erstinbetriebnahmefirmware-intern automatisch gesetzt, falls bestimmte Voraussetzungen des CU-Gerätes und desFirmware-Standes gegeben sind.
Die Werte für die Stromregleradaption p391[0] … p393[0] sind in den eingegebenen Motordatenenthalten und bedürfen keiner weiteren Optimierung.
Falls Sie im Verlauf der manuellen Optimierung Antriebsparameter online ändern, ist folgenderAblauf einzuhalten, um die online geänderten Werte bleibend zu übernehmen undAntriebsparameter und Projekt konsistent zu halten:
1. Antriebsgerät Ram-Nach-Rom sichern2. Antriebsgerät ins Projekt hochladen3. Projekt speichern

13 Optimierung des Geschwindigkeitsreglers
IBS LinMot P10-70 an SINAMICSBeitrags-ID: 108986658, V1.3, FAQ-03UQCU8S, 09/2014 23
Siem
ens
AG20
14Al
lrig
hts
rese
rved
13 Optimierung des GeschwindigkeitsreglersBitte führen sie jetzt die Funktion automatische Drehzahlreglereinstellung aus.
Die Werte der folgenden Tabelle sind beispielhaft und nicht allgemeingültig. Sie entstammeneiner bestimmten Versuchskonfiguration und dienen lediglich als grobe Orientierung, um dasErgebnis der automatischen Berechnung einzuordnen.
Param.-Nr.
Bezeichnung Ein-heit
P10-70x80
P10-70x160
P10-70x240
P10-70x320
P10-70x400
p1460 [0] Geschwindigkeits-regler p-Verstärkung Ns/m 834,0
p1462[0] Geschwindigkeits-regler Nachstellzeit ms 3,05
Nach Ausführen dieser Optimierung sind die Grenzwerte gemäß Abschnitt 11 „Kontrolle derGrenz- und Bezugswerte“ erneut zu überprüfen.
14 Dokument-Historie
IBS LinMot P10-70 an SINAMICSBeitrags-ID: 108986658, V1.3, FAQ-03UQCU8S, 09/2014 24
Siem
ens
AG20
14Al
lrig
hts
rese
rved
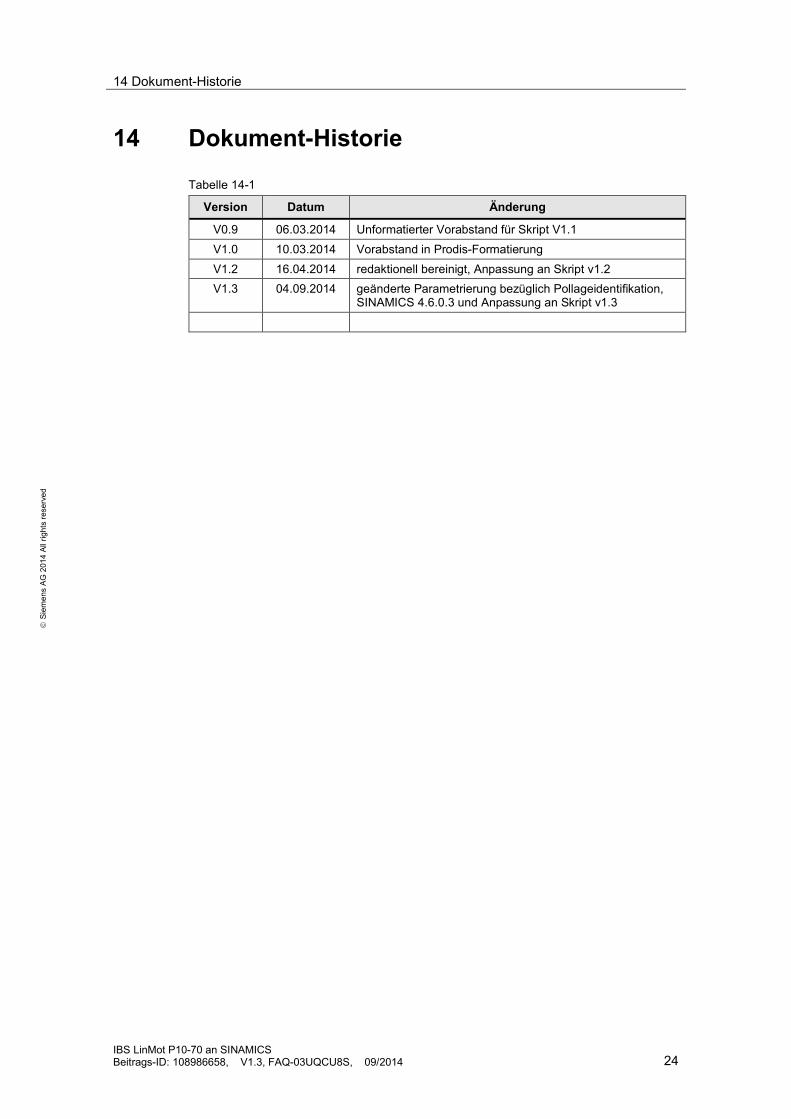
14 Dokument-Historie
Tabelle 14-1
Version Datum Änderung
V0.9 06.03.2014 Unformatierter Vorabstand für Skript V1.1V1.0 10.03.2014 Vorabstand in Prodis-FormatierungV1.2 16.04.2014 redaktionell bereinigt, Anpassung an Skript v1.2V1.3 04.09.2014 geänderte Parametrierung bezüglich Pollageidentifikation,
SINAMICS 4.6.0.3 und Anpassung an Skript v1.3


















![[MODULOS] - Controle_Documentos P10](https://img.pdfslide.tips/doc/110x75/557212b0497959fc0b90bbd7/modulos-controledocumentos-p10.jpg)










