Embed Size (px)
Citation preview

BỘ GIÁO DỤC VÀ ĐÀO TẠO
ĐẠI HỌC THÁI NGUYÊN
-----------------***-----------------
Mai Trung Thái
NGHIÊN CỨU ĐIỀU KHIỂN TỐI ƢU CHO HỆ VỚI
THAM SỐ PHÂN BỐ, CÓ TRỄ, PHI TUYẾN
Chuyên ngành: Kỹ thuật điều khiển và tự động hóa
Mã số: 9 52 02 16
TÓM TẮT LUẬN ÁN TIẾN SĨ KỸ THUẬT
Thái Nguyên - 2018
Công trình được hoàn thành tại:
Trường Đại học Kỹ thuật Công Nghiệp Thái Nguyên
Người hướng dẫn khoa học: PGS.TS Nguyễn Hữu Công
Phản biện 1: ………………………………
Phản biện 2: ………………………………
Phản biện 2: ………………………………
Luận án sẽ được bảo vệ trước Hội đồng đánh giá luận án tiến sĩ cấp Trường
họp tại Trường Đại học Kỹ thuật Công nghiệp Thái nguyên
Vào hồi……., giờ…….ngày…….tháng…….năm…………
Có thể tìm hiểu luận án tại:
1. Thư viện Quốc gia Việt Nam
2. Trung tâm học liệu Đại học Thái Nguyên
3. Thư viện Trường Đại học Kỹ thuật Công nghiệp Thái Nguyên
DANH MỤC CÁC CÔNG TRÌNH KHOA HỌC CÓ
LIÊN QUAN ĐẾN LUẬN ÁN
1. Mai Trung Thái, Nguyễn Thị Mai Hương (2013), "Điều khiển tối ưu cho một
hệ với tham số phân bố sử dụng phương pháp Gradient ", Tạp chí Khoa học
Công nghệ - Đại học Thái Nguyên, Số 10, tập 110, tr. 45 - 52.
2. Mai Trung Thai, Nguyen Huu Cong, Nguyen Van Chi, Vu Van Dam,
(2017), “Applying Pade approximation model in optimal control problem for a
distributed parameter system with time delay”, International Journal of
Computing and Optimization, HIKARI Ltd, Vol.4, no.1, 2017, pp. 19-30
3. Mai Trung Thái, Nguyễn Thị Mai Hương (2017), “Hai phương pháp thay
thế đối tượng có trễ trong bài toán điều khiển tối hệ với tham số phân bố”,
ISSN 1859-1531, Tạp chí Khoa học và Công nghệ Đại học Đà nẵng, số 5
(114). 2017 – quyển 1.
4. Cong Huu Nguyen, Mai Trung Thai (2018), “Optimal control for a distributed
parameter system with time-delay, non-linear using the numerical method.
Application to one-sided heat conduction system”, ISSN 2395-0250,
International Journal of Thermal Engineering (IJTE), Vol 4, Issue 1, Jan-Feb
2018

1
MỞ ĐẦU
1. Đặt vấn đề
Lý thuyết điều khiển tối ưu đã được nghiên cứu từ lâu song cho tới nay các tác giả chủ
yếu nghiên cứu bài toán điều khiển tối ưu cho hệ có tham số tập trung mà chưa quan tâm nhiều
tới bài toán điều khiển tối ưu cho hệ với tham số phân bố. Điều khiển tối ưu cho hệ với tham
số phân bố được ứng dụng trong nhiều lĩnh vực khác nhau như: tôi, ram, nhiệt luyện, ủ vật liệu
từ, nung gạch men, cán thép,….Trong một số công nghệ, quá trình gia nhiệt được thực hiện
trong lò nung thường bằng dầu nặng FO, ví dụ như quá trình nung trong cán thép hay nung
phôi khi sản xuất nhôm kính. Trong trường hợp này, hàm truyền của lò nung là khâu quán tính
có trễ, còn mối quan hệ giữa nhiệt độ lò là các phương trình đạo hàm riêng dạng parabolic với
điều kiện biên loại 3. Nếu ta xét bài toán điều khiển tối ưu cho quá trình “nung chính xác
nhất”, lúc này đối tượng điều khiển là hệ với tham số phân bố, có trễ. Với bài toán này, đã
được một số tác giả quan tâm và tìm được lời giải bằng phương pháp biến phân, phương pháp
dùng nguyên lý cực đại của Pontryagin hay phương pháp số như trong [8,10,72]. Trong đó
phương pháp số tỏ ra ưu việt hơn cả. Tuy nhiên trong một số công nghệ khác, lò nung là lò
điện, tức là đốt bằng dây điện trở như quá trình tôi, ram, nhiệt luyện các chi tiết cơ khí, ủ vật
liệu từ, v.v…Lúc này hàm truyền của lò điện trở cũng là khâu quán tính bậc nhất có trễ dạng:
Y( ) .W( )
X( ) ( 1)
ss k es
s s (0.1)
Nhưng, lúc này k là hệ số phụ thuộc vào nhiệt độ trong lò. Thực tế qua việc nhận dạng
lò điện trở thì k thay đổi khá nhiều, ví dụ như trong lò điện trở với dải nhiệt độ thay đổi từ
0-5000C. (Việc này sẽ được chứng minh ở phần sau). Vậy nếu vẫn xét bài toán điều khiển tối
ưu cho quá trình “nung chính xác nhất” thì đây là bài toán điều khiển tối ưu cho đối tượng với
tham số phân bố, có trễ, phi tuyến. Chính sự phi tuyến của k làm cho lời giải của bài toán trở
nên rất phức tạp. Do vậy để bài toán có thể được ứng dụng trong thực tế, luận án này tìm cách
đưa ra lời giải cho bài toán với điểm khác biệt lớn nhất là tính phi tuyến của k . Bài toán điều
khiển tối ưu vẫn được thực hiện bằng phương pháp số. Lời giải cho trường hợp xét tới tính phi
tuyến của k chưa được các tác giả trong và ngoài nước nghiên cứu. Ngoài ra, để mở rộng bài
toán điều khiển tối ưu, luận án cũng xét thêm trường hợp hệ số trễ () của lò điện trở là lớn
đáng kể so với hằng số thời gian (T) của nó.
2. Tính cấp thiết của luận án
Điều khiển tối ưu theo tiêu chuẩn nung chính xác nhất cho hệ với tham số phân bố được
ứng dụng trong nhiều lĩnh vực khác nhau trong các lĩnh vực công nghiệp. Các nghiên cứu
trước đây [10,79] cũng đã giải quyết bài toán điều khiển tối ưu cho hệ với tham số phân bố, có
trễ. Nếu trong lĩnh vực lò nung thì bài toán này đã được áp dụng cho các công nghệ lò đốt bằng
dầu nặng FO. Tuy nhiên, với một số công nghệ như ủ vật liệu từ, tôi ram nhiệt luyện chi tiết
máy thì lò nung được thực hiện bằng lò điện. Vì vậy đây là bài toán điều khiển tối ưu cho hệ
với tham số phân bố, có trễ, phi tuyến. Với bài toán này, hiện nay chưa có sự nghiên cứu của
các tác giả trong và ngoài nước, vì vậy đề tài này có tính cấp thiết và nếu được giải quyết sẽ

2
một mặt bổ sung vào lý thuyết điều khiển cho hệ có tham số phân bố, mặt khác cũng mở ra khả
năng ứng dụng vào thực tế.
3. Mục tiêu của luận án
Xây dựng mô hình toán của đối tượng với tham số phân bố, có trễ, phi tuyến; xét cả
trường hợp có hệ số trễ lớn. Tìm ra lời giải cho bài toán điều khiển tối ưu cho hệ với tham số
phân bố, có trễ, phi tuyến bằng phương pháp số. Hệ này được đặc trưng bằng quá trình gia
nhiệt một phía trong lò điện trở đối với vật dầy. Trong đó quan tâm nhất tới tính phi tuyến
(thay đổi) của hệ số truyền tĩnh k của lò điện trở. Ngoài ra còn quan tâm tới trường hợp thời
gian trễ () là lớn đáng kể so với hằng số thời gian (T) của lò. Mô phỏng và thực nghiệm để
chứng minh tính chính xác và tính ổn định của nghiệm tối ưu.
4. Đối tƣợng, phạm vi và phƣơng pháp nghiên cứu của luận án
- Đối tượng nghiên cứu: Hệ thống điều khiển nhiệt độ lò điện trở và vật nung, đó là một hệ
với tham số phân bố, có trễ, phi tuyến.
- Phạm vi nghiên cứu: Nghiên cứu đối tượng động học có trễ mà có thời gian trễ () là lớn
đáng kể so với hằng số thời gian (T) của nó, tức là khi đối tượng có tỷ số T/ thỏa mãn điều
kiện 6 T/ < 10 [7], sau đó áp dụng vào việc giải bài toán điều khiển tối ưu cho hệ với tham
số phân bố, có trễ, phi tuyến. Lập trình mô phỏng trên máy tính và thí nghiệm trên mô hình vật
lý cụ thể.
- Phương pháp nghiên cứu: Phân tích, đánh giá các công trình nghiên cứu đã được công bố
trên các bài báo, tạp chí, các luận án về điều khiển tối ưu cho hệ với tham số phân bố, có trễ,
phi tuyến nhằm xác định chắc chắn các mục tiêu đề ra. Nghiên cứu các phương pháp giải bài
toán điều khiển tối ưu cho hệ với tham số phân bố, có trễ, phi tuyến. Lập trình mô phỏng trên
Matlab & Simulink để kiểm chứng lại lý thuyết. Tiến hành thí nghiệm kiểm chứng kết quả
nghiên cứu lý thuyết và kết quả mô phỏng trên mô hình vật lý hệ thống phi tuyến cụ thể (lò
điện trở và vật nung).
5. Những đóng góp mới về mặt khoa học và thực tiễn của luận án
Luận án đã có những đóng góp mới như sau:
- Ứng dụng phép biến đổi Laplace, phương pháp tuyến tính hóa từng đoạn và khai triển
Pade đã đưa ra được lời giải tường minh cho bài toán tìm được trường nhiệt độ của vật nung khi
biết điện áp cung cấp cho lò - xét cả trong trường hợp hệ số truyền tĩnh k của lò là phi tuyến và
thời gian trễ của lò lớn.
- Đã tìm ra lời giải cho bài toán điều khiển tối ưu hệ với tham số phân bố, có trễ, phi
tuyến bằng phương pháp số, có tính tới cả điều kiện giới hạn pha – Hệ này ứng dụng cho bài
toán nung chính xác nhất trong quá trình gia nhiệt.
- Đã mô phỏng và tiến hành thực nghiệm để kiểm chứng kết quả nghiên cứu lý thuyết
làm cơ sở cho việc triển khai điều khiển thực tế nung chính xác ở lò điện trở khi gia nhiệt cho
vật nung dạng tấm phẳng.
Những đóng góp trên có ý nghĩa khoa học, có giá trị thực tiễn, có thể áp dụng cho bài
toán nung chính xác nhất trong quá trình gia nhiệt ở lò điện trở, ví dụ áp dụng trong một số lĩnh
vực như quá trình tôi, ram, nhiệt luyện các chi tiết máy, ủ vật liệu từ, v.v…

3
6. Cấu trúc của luận án:
Luận án được trình bày trong 4 chương chính và phần kết luận như sau:
Chương 1: Tổng quan về điều khiển tối ưu cho hệ với tham số phân bố, có trễ, phi tuyến
Chương 2: Đề xuất và giải bài toán điều khiển tối ưu cho hệ với tham số phân bố, có trễ, phi
tuyến bằng phương pháp số sử dụng phép biến đổi Laplace.
Chương 3: Các chương trình tính toán và các kết quả mô phỏng
Chương 4. Thực nghiệm kiểm chứng chất lượng phương pháp đã đề xuất trên mô hình hệ
thống thực.
- Kết luận và kiến nghị
CHƢƠNG 1
TỔNG QUAN VỀ ĐIỀU KHIỂN TỐI ƢU CHO HỆ VỚI THAM SỐ PHÂN BỐ,
CÓ TRỄ, PHI TUYẾN.
1.1. Tổng quan chung
1.2. Tổng quan các công trình nghiên cứu về điều khiển tối ƣu cho hệ với tham số phân
bố, có trễ, phi tuyến trong và ngoài nƣớc.
Lý thuyết về điều khiển tối ưu cho hệ với tham số phân bố (DPS) đã được nghiên cứu từ
thập niên 60 của thế kỷ trước. Buttkovskii và Lerner đã đưa ra bài báo đầu tiên trong lĩnh vực
này vào năm 1960 [36], bắt đầu từ nguyên lý cực đại cho một lớp các hệ thống tham số phân
bố. Điều này đã cho ra một loạt các bài báo từ Butkovskii [32,34,35]. Các nghiên cứu này đã
đề cập đến việc mô tả bài toán và nguyên lý cực đại cho một hệ tham số phân bố được mô tả
bởi một tập các phương trình tích phân phi tuyến. Các kết quả nghiên cứu [29,46,72,86], các
tác giả đã dùng nguyên lí cực đại của Pôntriagin và phương pháp biến phân để đưa ra lời giải
cho bài toán điều khiển tối ưu một hệ với tham số phân bố (cụ thể là bài toán truyền nhiệt một
phía trong lò gia nhiệt). Khi tìm nghiệm tối ưu thường dẫn đến phải giải các phương trình
Fredhom loại một nên rất khó giải, khó khẳng định được sự tồn tại nghiệm. Đặc biệt khi hàm
điều khiển v(t) có kèm theo điều kiện ràng buộc thì việc tìm nghiệm của các phương trình trên
là rất khó khăn. Việc ứng dụng các kết quả này vào thực tế gặp khó khăn vì nghiệm tối ưu v*(t)
là các hàm đổi dấu tức thời, tức là tín hiệu điều khiển thuộc dạng “bang-bang”- xung vuông.
Song v*(t) ở đây chính là nhiệt độ lò nên không thể thay đổi đột ngột được vì có quán tính
nhiệt khá lớn, nhất là khi tần suất thay đổi nhiều.
Ở Việt Nam, vấn đề này đã được một số học giả tiếp cận, nghiên cứu trong khoảng hơn
một thập niên trở lại đây. Các kết quả nghiên cứu chủ yếu là các bài báo, luận văn thạc sỹ của
một số học viên cao học thuộc một số trường Đại học trong cả nước. Theo hiểu biết của tác
giả, hiện nay các công trình nghiên cứu về hệ với tham số phân bố, có trễ, phi tuyến, đặc biệt
khi hệ này được áp dụng cho bài toán truyền nhiệt một phía trong lò nung là lò điện (tức là đốt
bằng dây điện trở áp dụng cho các quá trình tôi, ram, nhiệt luyện các chi tiết cơ khí, ủ vật liệu
từ,…) để điều khiển nhiệt độ cho vật nung có dạng tấm phẳng theo tiêu chuẩn nung chính xác
nhất ở trong nước chưa có tác giả nào nghiên cứu, chủ yếu mới dừng lại ở nghiên cứu về hệ
với tham số phân bố, có trễ, điển hình là một số bài báo và luận án tiến sĩ như [7,8,9,10,11]
4
Đặc biệt, theo [10], luận án nghiên cứu giải bài toán điều khiển tối ưu cho hệ với tham
số phân bố có trễ, hệ này được áp dụng cho hệ thống truyền nhiệt một phía trong lò nung để
điều khiển nhiệt độ cho phôi tấm theo tiêu chuẩn nung chính xác nhất, quá trình gia nhiệt cho
lò nung bằng dầu nặng FO, ví dụ như quá trình nung trong cán thép hay nung phôi khi sản xuất
nhôm kính. [10] đã đưa ra hướng khắc phục nhược điểm của [29,46,72,86] bằng cách không
dùng tác động điều khiển là nhiệt độ lò v(t) mà là công suất p(t) cung cấp cho lò thông qua một
khâu chuyển đổi. Công suất cung cấp cho lò nếu dùng năng lượng điện thì việc đóng mở các
hệ thống cung cấp điện (ví dụ như rơle, công tắc tơ, bộ biến đổi thyristor…) được thực hiện rất
nhanh vì các thiết bị đóng cắt có quán tính nhỏ. Điều này hoàn toàn có thể thực hiện được
trong thực tế. Khâu chuyển đổi biểu thị mối quan hệ giữa công suất cung cấp cho lò và nhiệt
độ lò, nó là một khâu quán tính bậc nhất có trễ, trong đó khâu trễ se đã được xấp xỉ bằng một
khâu quán tính bậc nhất theo xấp xỉ Taylor.
Ngoài ra, [10] xét đối với trường hợp khâu quán tính bậc nhất có trễ có thời gian trễ ()
là khá nhỏ so với hằng số thời gian (T) của nó, cụ thể là tỷ số T/ thỏa mãn điều kiện T/ > 10
[7]. Sau khi đưa thêm vào khâu chuyển đổi, hàm điều khiển tối ưu cần tìm là p*(t) chính là
công suất cung cấp cho lò chứ không phải là nhiệt độ lò v(t). Như vậy, dù hàm điều khiển tối
ưu p*(t) có dạng bang-bang (dạng xung vuông) tức là có dạng biến thiên nhảy cấp thì hoàn
toàn có thể thực hiện được vì quán tính của các phần tử điện là rất nhỏ so với các phần tử
nhiệt.
Nội dung luận án [10] đã giải quyết được một số vấn đề chính như sau:
- Xét với công nghệ gia nhiệt cho các lò nung phôi cán được cung cấp năng lượng bằng
việc đốt nguyên liệu là dầu nặng FO. Việc điều chỉnh công suất cung cấp cho lò là điều chỉnh
lưu lượng dầu để phối hợp với lượng không khí trong quá trình đốt.
- Xét với đối tượng có trễ nhỏ, cụ thể là đối tượng có tỷ số T/ thỏa mãn điều kiện
T/ 10 [7], khâu trễ se được thay thế bằng khâu quán tính bậc nhất theo xấp xỉ Taylor.
- Đã giải được bài toán điều khiển tối ưu cho hệ với tham số phân bố, có trễ khi xét các
hệ số a, , k của lò và vật nung là hằng số.
- Chưa đề cập đến phần phi tuyến, cụ thể là chưa giải bài toán điều khiển tối ưu khi xét
các hệ số a, , k là phi tuyến (thực tế các hệ số này luôn thay đổi theo nhiệt độ của môi trường
không khí trong lò nung, tức là chúng có tính phi tuyến).
1.3. Những vấn đề cần tiếp tục nghiên cứu về điều khiển tối ƣu cho hệ với tham số phân
bố, có trễ, phi tuyến và hƣớng nghiên cứu của luận án
Một số vấn đề tồn tại cần được tiếp tục nghiên cứu hoàn thiện:
Cho đến thời điểm này, tác giả vẫn chưa tìm thấy được nhiều công trình nghiên cứu về
điều khiển tối ưu cho hệ với tham số phân bố, có trễ, phi tuyến, đặc biệt hệ này được áp dụng
cho hệ thống truyền nhiệt một phía trong lò điện trở để điều khiển nhiệt độ cho vật nung có
dạng tấm phẳng theo tiêu chuẩn nung chính xác nhất (áp dụng cho một số công nghệ như ủ vật
liệu từ, tôi ram nhiệt luyện các chi tiết cơ khí,…). Ngoài ra, hiện nay cũng chưa có nhiều công
trình khoa học ở trong và ngoài nước đưa ra một cách chính xác biểu thức toán học mô tả các

5
hệ số a, , k trong phương trình truyền nhiệt là phi tuyến, các hệ số này chủ yếu được xác định
gần đúng thông qua thực nghiệm.
Hướng nghiên cứu mới của luận án là:
- Thành lập bài toán điều khiển tối ưu cho hệ với tham số phân bố, có trễ, phi tuyến
- Nghiên cứu đối tượng có trễ khá lớn, cụ thể là đối tượng có tỷ số T/ thỏa mãn điều kiện
6 T/ < 10 [7]. Thay thế khâu trễ se trong khâu quán tính bậc nhất, có trễ (lò điện trở)
bằng phép xấp xỉ Pade bậc một.
- Phân tích tính phi tuyến của hệ số truyền tĩnh k của lò theo nhiệt độ bằng cách nhận dạng lò
điện trở thực tế.
- Sau đó tiến hành giải bài toán điều khiển tối ưu cho hệ với tham số phân bố, có trễ, phi tuyến
bằng phương pháp số. Hệ này được áp dụng cho hệ thống truyền nhiệt một phía trong lò điện
trở để điều khiển nhiệt độ cho vật nung có dạng tấm phẳng (xét với vật dầy) theo tiêu chuẩn
nung chính xác nhất.
- Lập các chương trình tính và xây dựng các thuật toán, sau đó tiến hành mô phỏng trên Matlab
để kiểm tra lời giải của bài toán điều khiển tối ưu.
- Tiến hành thí nghiệm trên mô hình hệ thống thực là lò điện trở và vật nung để kiểm tra các kết
quả mô phỏng.
1.4. Kết luận chƣơng 1
Chương 1 của luận án đã tập trung nghiên cứu tổng quan về điều khiển tối ưu cho hệ với
tham số phân bố, có trễ, phi tuyến; đề cập và phân tích các công trình, các bài báo của các tác
giả trong và ngoài nước xung quanh vấn đề này. Căn cứ vào việc phân tích, tổng hợp và nghiên
cứu kỹ lưỡng những vấn đề mà các nhà nghiên cứu đã đưa ra, cuối chương tác giả đã đưa ra
những vấn đề cần tiếp tục nghiên cứu về điều khiển tối ưu cho hệ với tham số phân bố, có trễ,
phi tuyến và hướng nghiên cứu mới của luận án.
CHƢƠNG 2
ĐỀ XUẤT VÀ GIẢI BÀI TOÁN ĐIỀU KHIỂN TỐI ƢU CHO HỆ VỚI THAM SỐ
PHÂN BỐ, CÓ TRỄ, PHI TUYẾN BẰNG PHƢƠNG PHÁP SỐ SỬ DỤNG PHÉP
BIẾN ĐỔI LAPLACE
2.1. Thành lập bài toán điều khiển tối ƣu
2.1.1. Mô hình đối tượng
Quá trình đốt nóng một phía cho vật nung có dạng tấm phẳng trong lò điện trở được mô
tả bằng phương trình vi phân đạo hàm riêng [10], [79].
2
2
( , ) ( , )q x t q x ta
tx
(2.1)

6
trong đó: q(x,t) là phân bố nhiệt độ trong vật nung, phụ thuộc vào tọa độ không gian x với
(0 x L) và thời gian t với (0 t tf ), L là bề dầy của vật (m), tf là thời gian nung cho phép
(s), a là hệ số dẫn nhiệt độ (m2/s).
Các điều kiện đầu và điều kiện biên [10,79]:
0( ,0) ( ) onsq x q x c t (2.2)
0
( , )(0, ) ( )
x
q x tq t v t
x
(2.3)
( , )
0x L
q x t
x
(2.4)
Với là hệ số trao đổi nhiệt giữa môi trường không khí trong lò và vật (w/m2.độ); v(t) là
nhiệt độ của môi trường không khí trong lò (0C); q(0,t) là phân bố nhiệt độ tại bề mặt vật;
q0(x) là hàm phân bố nhiệt độ ban đầu của vật (hằng số, coi như bằng nhiệt độ môi trường);
là hệ số dẫn nhiệt của vật (W/m.độ).
Nhiệt độ của môi trường không khí trong lò v(t) là đại lượng trung gian được điều khiển
bởi đầu vào là điện áp cung cấp u(t), phân bố nhiệt độ trong vật q(x,t) được điều khiển thông qua
nhiệt độ của môi trường không khí trong lò v(t), nhiệt độ v(t) này lại được điều khiển bởi điện áp
u(t). Như vậy, thực chất sự phân bố nhiệt trong vật nung q(x,t) sẽ phụ thuộc vào điện áp cung
cấp u(t).
Quan hệ giữa điện áp cung cấp cho lò u(t) và nhiệt độ lò v(t) thường gặp là một khâu
quán tính bậc nhất, có trễ theo phương trình [6,8,10,79]:
. ( ) ( ) ( )T v t v t k u t . (2.5)
trong đó: T là hằng số thời gian của lò (s), là thời gian trễ của lò (s), k là hệ số truyền tĩnh của
lò (hằng số), u(t) là điện áp cung cấp cho lò (hàm điều khiển của hệ thống).
Tuy nhiên, trong biểu thức (2.5), lúc này k là hệ số thay đổi phụ thuộc vào nhiệt độ
trong lò, tức là k là một hàm số theo nhiệt độ v, khi đó hệ số truyền tĩnh có thể được biễu qua
phương trình: ( )k k v , do đó k là một hệ số phi tuyến.
Thực tế qua việc nhận dạng lò điện trở thì k thay đổi khá nhiều, ví dụ như trong lò điện
trở với dải nhiệt độ thay đổi từ 0-5000C. ( Việc này sẽ được chứng minh ở phần sau).
Lúc đó quan hệ giữa u(t) và v(t) có thể được biểu diễn theo phương trình:
. ( ) ( ) ( )v t v t k u t . (2.6)
với k là hệ số truyền tĩnh phi tuyến của lò.
Như vậy, đối tượng điều khiển (lò điện trở - vật nung) được mô tả bằng phương trình vi
phân đạo hàm riêng bậc hai-dạng parabolic (2.1) với các điều kiện đầu và điều kiện biên (2.2),
(2.3), (2.4) kết hợp với phương trình vi phân thường, có trễ, phi tuyến (2.6). Có thể thấy đây là
một dạng bài toán điển hình của một hệ với tham số phân bố, có trễ, phi tuyến.
Tuy nhiên, khi hệ số k là phi tuyến thì rất khó tìm được lời giải và không áp dụng được
phép biến đổi Laplace. Vì vậy, luận án sẽ thực hiện tuyến tính hóa hệ số k thành N giá trị là:
1 2 3, , ,..., Nk k k k . Giả thiết, 1 2 3, , ,..., Nk k k k là các hằng số.

7
2.1.2. Phiếm hàm mục tiêu
Bài toán điều khiển tối ưu được đặt ra như sau: tìm một hàm điều khiển u(t), với
0 t tf sao cho cực tiểu hoá sai lệch nhiệt độ giữa phân bố nhiệt độ mong muốn q*(x) với
nhiệt độ thực của vật tại thời điểm t = tf cho trước q(x,tf ), tức là hàm mục tiêu:
2
*
0
( ) ( , )
L
c fJ q x q x t dx min (2.7)
Trong hàm mục tiêu cần cực tiểu thì q*(x) là phân bố nhiệt độ mong muốn (cho trước),
còn q(x,tf) là hàm chưa biết. Rõ ràng hàm q(x,tf) là giá trị của hàm q(x,t) tại thời điểm t=tf,
được hiểu là cuối quá trình gia nhiệt đảm bảo sự đồng đều nhiệt độ nhất trong toàn bộ vật
nung. Bài toán loại này được gọi là bài toán nung chính xác nhất. Hàm q(x,t) là nghiệm của
phương trình vi phân (2.1) với các điều kiện đầu và điều kiện biên (2.2), (2.3), (2.4), hàm q(x,t)
sau khi tính được chắc chắn phải phụ thuộc vào điện áp cung cấp cho lò u(t).
2.1.3. Điều kiện ràng buộc
2.1.4. Các bước giải
Quá trình tìm lời giải tối ưu gồm hai bước sau:
- Bước 1: Tìm quan hệ giữa phân bố nhiệt độ trong vật nung q(x,t) và tín hiệu điều khiển
điện áp u(t). Đây chính là việc giải phương trình truyền nhiệt (phương trình đạo hàm riêng
Parabolic) với điều kiện biên loại 3 (cho biết quy luật trao đổi nhiệt giữa bề mặt của vật với
môi trường xung quanh và nhiệt độ của môi trường xung quanh) kết hợp với phương trình vi
phân thường có trễ, phi tuyến (quan hệ giữa u(t) và v(t))
- Bước 2: Phân bố nhiệt độ trong vật nung q(x,t) tìm được sẽ phụ thuộc vào hàm điều
khiển u(t). Thay q(x,t) tìm được ở bước 1 vào phiếm hàm mục tiêu (2.7), sau đó dùng phương
pháp số để thay cho việc cần cực tiểu một phiếm hàm thành việc cực tiểu một hàm nhiều biến
để tìm ra nghiệm tối ưu u*(t).
2.2. Giới thiệu phƣơng pháp xấp xỉ Pade
2.2.1. Đặt vấn đề
2.2.2. Phương pháp xấp xỉ Pade
Xét một đối tượng có trễ dạng se được khai triển thành chuỗi lũy thừa:
0 !
ss
e
(2.17)
- Với r = 1, ta có xấp xỉ Pade bậc một (Pade 1):
2
2
s se
s
(2.21)
- Với r = 2, ta có xấp xỉ Pade bậc hai (Pade 2):
2 2
2 2
12 6
12 6
s s se
s s
(2.22)
- Với r = 3,4,...ta có xấp xỉ Pade với bậc cao hơn.
với r là số bậc cần thay thế; là thời gian trễ của đối tượng.
8
2.3. Phƣơng pháp tính gần đúng tích phân xác định
2.4. Nhận dạng mô hình lò điện trở
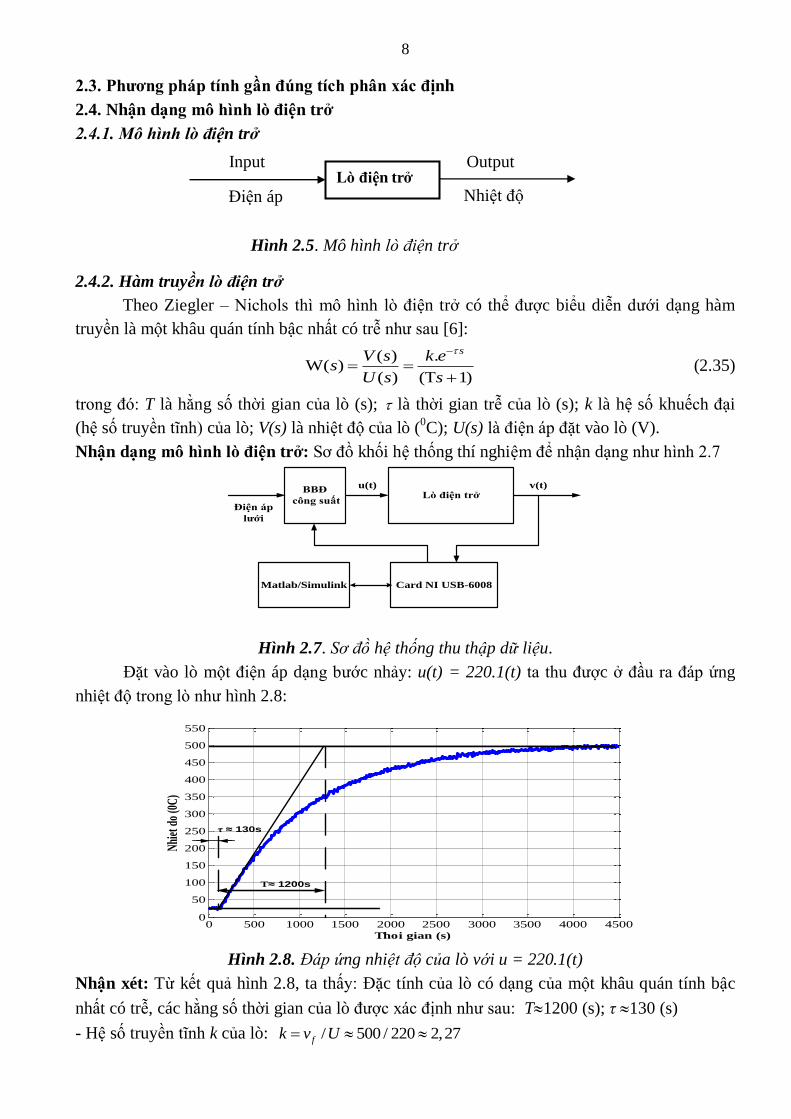
2.4.1. Mô hình lò điện trở
2.4.2. Hàm truyền lò điện trở
Theo Ziegler – Nichols thì mô hình lò điện trở có thể được biểu diễn dưới dạng hàm
truyền là một khâu quán tính bậc nhất có trễ như sau [6]:
( ) .
W( )( ) ( 1)
sV s k es
U s s
(2.35)
trong đó: T là hằng số thời gian của lò (s); là thời gian trễ của lò (s); k là hệ số khuếch đại
(hệ số truyền tĩnh) của lò; V(s) là nhiệt độ của lò (0C); U(s) là điện áp đặt vào lò (V).
Nhận dạng mô hình lò điện trở: Sơ đồ khối hệ thống thí nghiệm để nhận dạng như hình 2.7
Lò điện trởBBĐ
công suất
u(t) v(t)
Card NI USB-6008Matlab/Simulink
Điện áp
lƣới
Hình 2.7. Sơ đồ hệ thống thu thập dữ liệu.
Đặt vào lò một điện áp dạng bước nhảy: u(t) = 220.1(t) ta thu được ở đầu ra đáp ứng
nhiệt độ trong lò như hình 2.8:
0 500 1000 1500 2000 2500 3000 3500 4000 45000
50
100
150
200
250
300
350
400
450
500
550
Thoi gian (s)
Nhi
et d
o (0
C)
T≈ 1200s
τ ≈ 130s
Hình 2.8. Đáp ứng nhiệt độ của lò với u = 220.1(t)
Nhận xét: Từ kết quả hình 2.8, ta thấy: Đặc tính của lò có dạng của một khâu quán tính bậc
nhất có trễ, các hằng số thời gian của lò được xác định như sau: T1200 (s); τ 130 (s)
- Hệ số truyền tĩnh k của lò:
/ 500 / 220 2,27fk v U
Input Output
Điện áp Nhiệt độ
Hình 2.5. Mô hình lò điện trở
Lò điện trở
9
trong đó vf là nhiệt độ đặt, U là điện áp cung cấp cho lò
- Khi nhiệt độ lò v(t) bằng vf thìk const , tuy nhiên v(t) phụ thuộc vào thời gian t, khi v(t) thay
đổi từ nhiệt độ môi trường v0 đến nhiệt độ đặt vf thì k cũng thay đổi phụ thuộc vào v(t), tức là
k const . Để xác định chính xác hệ số k tại mỗi thời điểm t là rất khó khăn
Mục tiêu của luận án là tìm lời giải cho bài toán (2.1), (2.2), (2.3), (2.4) và (2.6) khi
xét hệ số truyền tĩnh k của lò là phi tuyến và coi các hệ số a, của vật là hằng số.
Để phân
tích sự thay đổi hệ số k theo nhiệt độ v(t), về lý thuyết có thể thực hiện như sau:
- Giữ nhiệt độ đặt vf = const, gọi các khoảng thay đổi điện áp là Δu (V), các khoảng thay đổi
của nhiệt độ lò là Δv (0C). Đặt vào lò các điện áp thay đổi theo dạng bậc thang, sau một
khoảng thời gian Δt, điện áp tăng lên một lượng Δu cho tới điện áp u = 220 (V), khi đó hệ số
truyền tĩnh k của lò ứng với mỗi khoảng thời gian Δt có thể được tính:
/i i ik v u ( 1, 2,3,..., )i N (2.36)
Từ (2.36), ta thấy với nhiệt độ đặt vf và điện áp hiệu dụng 220V, ứng với mỗi cặp giá trị
(Δu, Δv) ta sẽ có N giá trị k , do đó khi áp dụng để tìm lời cho bài toán thì khối lượng tính toán
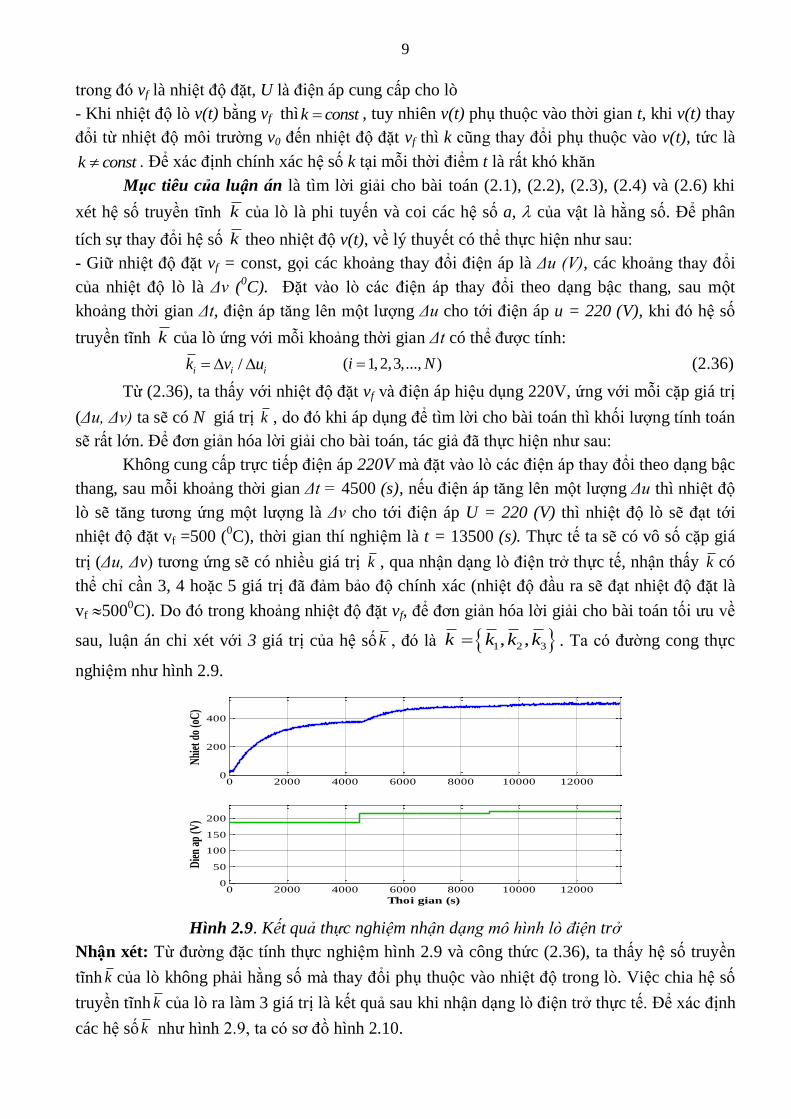
sẽ rất lớn. Để đơn giản hóa lời giải cho bài toán, tác giả đã thực hiện như sau: Không cung cấp trực tiếp điện áp 220V mà đặt vào lò các điện áp thay đổi theo dạng bậc
thang, sau mỗi khoảng thời gian Δt = 4500 (s), nếu điện áp tăng lên một lượng Δu thì nhiệt độ
lò sẽ tăng tương ứng một lượng là Δv cho tới điện áp U = 220 (V) thì nhiệt độ lò sẽ đạt tới
nhiệt độ đặt vf =500 (0C), thời gian thí nghiệm là t = 13500 (s). Thực tế ta sẽ có vô số cặp giá
trị (Δu, Δv) tương ứng sẽ có nhiều giá trị k , qua nhận dạng lò điện trở thực tế, nhận thấy k có
thể chỉ cần 3, 4 hoặc 5 giá trị đã đảm bảo độ chính xác (nhiệt độ đầu ra sẽ đạt nhiệt độ đặt là
vf 5000C). Do đó trong khoảng nhiệt độ đặt vf, để đơn giản hóa lời giải cho bài toán tối ưu về
sau, luận án chỉ xét với 3 giá trị của hệ sốk , đó là 1 2 3, ,k k k k . Ta có đường cong thực
nghiệm như hình 2.9.
0 2000 4000 6000 8000 10000 120000
200
400
Nhi
et d
o (o
C)
0 2000 4000 6000 8000 10000 120000
50
100
150
200
Thoi gian (s)
Die
n ap
(V)
Hình 2.9. Kết quả thực nghiệm nhận dạng mô hình lò điện trở
Nhận xét: Từ đường đặc tính thực nghiệm hình 2.9 và công thức (2.36), ta thấy hệ số truyền
tĩnh k của lò không phải hằng số mà thay đổi phụ thuộc vào nhiệt độ trong lò. Việc chia hệ số
truyền tĩnh k của lò ra làm 3 giá trị là kết quả sau khi nhận dạng lò điện trở thực tế. Để xác định
các hệ số k như hình 2.9, ta có sơ đồ hình 2.10.

10
0 2000 4000 6000 8000 10000 120000
50
100
150
200
250
300
350
400
450
500
550
Thoi gian (s)
Nhi
et d
o (o
C)
Δv1
Δv2
Δv3
Hình 2.10. Đáp ứng nhiệt độ của lò để xác định các Δv .
Từ hình 2.9 và hình 2.10, ta xác định được các khoảng thay đổi nhiệt độ Δv và các
khoảng thay đổi điện áp Δu, từ đó tính được các hệ số truyền tĩnh k của lò ứng với mỗi khoảng
thời gian Δt như sau:
Bảng 2.3. Bảng xác định hệ số truyền tĩnh k
STT Δv (0C) Δu (V) k v u
1 350 185 1,8
2 100 30 3,3
3 25 5 5
Từ hình 2.10 và bảng 2.3, ta thấy hệ số truyền tĩnh k của lò sẽ tăng khi nhiệt độ trong
lò tăng lên theo thời gian. Khi nhiệt độ lò thay đổi từ nhiệt độ môi trường đến khoảng 500 (0C)
thì giá trị của k thay đổi khá lớn.
Như vậy, qua việc phân tích ở trên, ta thấy hệ số truyền tĩnh k thay đổi phụ thuộc vào
nhiệt độ lò v(t) mà nhiệt độ lò v(t) lại thay đổi theo thời gian t tức là hệ số truyền tĩnh k cũng
thay đổi theo thời gian t . Trong khoảng nhiệt độ cho trước, chính sự tuyến tính hóa hệ số k ra
làm 3 giá trị là 1;k 2;k 3k sẽ làm cho lời giải của bài toán trở nên đơn giản hơn mà độ chính xác
có thể chấp nhận được (kết quả của lời giải sẽ được chứng minh ở nội dung chương 3)..
2.5. Lời giải của bài toán tối ƣu
Luận án đề xuất phương án giải bài toán tối ưu cho hệ trên như sau: chia khoảng thời
gian nung vật từ 0÷tf ra làm 3 khoảng thời gian bằng nhau Δt1 = Δt2 = Δt3 và gọi:
+ Δt1 = 0÷t1 ứng với khoảng nhiệt độ lò thay đổi từ v0÷v1 là Δv1, ta có hệ số 1k
+ Δt2 = t1÷t2 ứng với khoảng nhiệt độ lò thay đổi từ v1÷v2 là Δv2, ta có hệ số 2k
+ Δt3 = t2÷tf ứng với khoảng nhiệt độ lò thay đổi từ v2÷vf là Δv3, ta có hệ số 3k
với: 1 / 3;ft t
2 2 / 3;ft t tf là thời nung cho phép; v0 là nhiệt độ môi trường, vf là nhiệt độ xác
lập (nhiệt độ yêu cầu). Cụ thể xét trong khoảng thời gian Δt1 =0÷t1 như sau:

11
2.5.1. Tìm quan hệ giữa q1(x,t) và tín hiệu điều khiển u1(t)
Để tìm quan hệ giữa q1(x,t) và u1(t), ta dùng phép biến đổi Laplace thuận đối với tham
số thời gian t (khi áp dụng phép biến đổi Laplace với tham số thời gian t thì phương trình vi
phân đạo hàm riêng (2.1) đã được đưa về phương trình vi phân thường đối với biến x), sau đó
dùng phương pháp số để đưa ra lời giải cho quá trình truyền nhiệt.
Để giải phương trình đạo hàm riêng (2.1) với các điều kiện đầu và điều kiện biên (2.2),
(2.3), (2.4), áp dụng phép biến đổi Laplace đối với tham số thời gian t, được phương trình:
2
112
( , )( , )
Q x sa sQ x s
x
(2.38)
hoặc
2
112
( , )( , )
Q x s sQ x s
x a
(2.39)
trong đó: 1 1( , ) ( , )Q x s q x tL
Sau khi biến đổi các điều kiện biên (2.3), (2.4), ta được:
11 1
0
( , )(0, ) ( )
x
Q x sQ s V s
x
(2.40)
1( , )
0x L
Q x s
x
(2.41)
Từ phương trình (2.6), dùng phép biến đổi Laplace, trong đó ta coi khâu trễ e-s
được thay thế
gần đúng bằng một khâu xấp xỉ Pade bậc một, ta được:
1 1 1 1 1
12( 1) ( ) . ( ).e . ( )
12
s
s
Ts V s k U s k U ss
(2.42)
Trong đó: 1 1(s) ( )V v tL ; 1 1( ) ( )U s u tL
Nghiệm tổng quát của (2.39) là:
. .
1 1 1( , ) ( ). ( ).
s sx x
a aQ x s A s e B s e
(2.43)
Giải phương trình (2.43), cuối cùng ta được :
. . . .
1 1. . . .
. .( , ) . ( ).
. . .
s s s sL x L x
a a a a
s s s sL L L L
a a a a
e e e eQ x s V s
se e e e
a
(2.58)
Từ (2.42), ta có:
1 1 1
12( ) . ( )
1 12
s
V s k U ss
Ts
(2.59)
Thay (2.59) vào (2.58), ta được:
12
.( ) .( )
1
1 1
. . . .
. 12
( , ) ( )
1 1 . .2
s sL x L x
a a
s s s sL L L L
a a a a
sk e e
Q x s U ss
s aTs e e e e
(2.61)
Đặt:
.( ) .( )
1
1
. . . .
. 12
( , )
1 1 . .2
s sL x L x
a a
s s s sL L L L
a a a a
sk e e
G x ss
s aTs e e e e
(2.62)
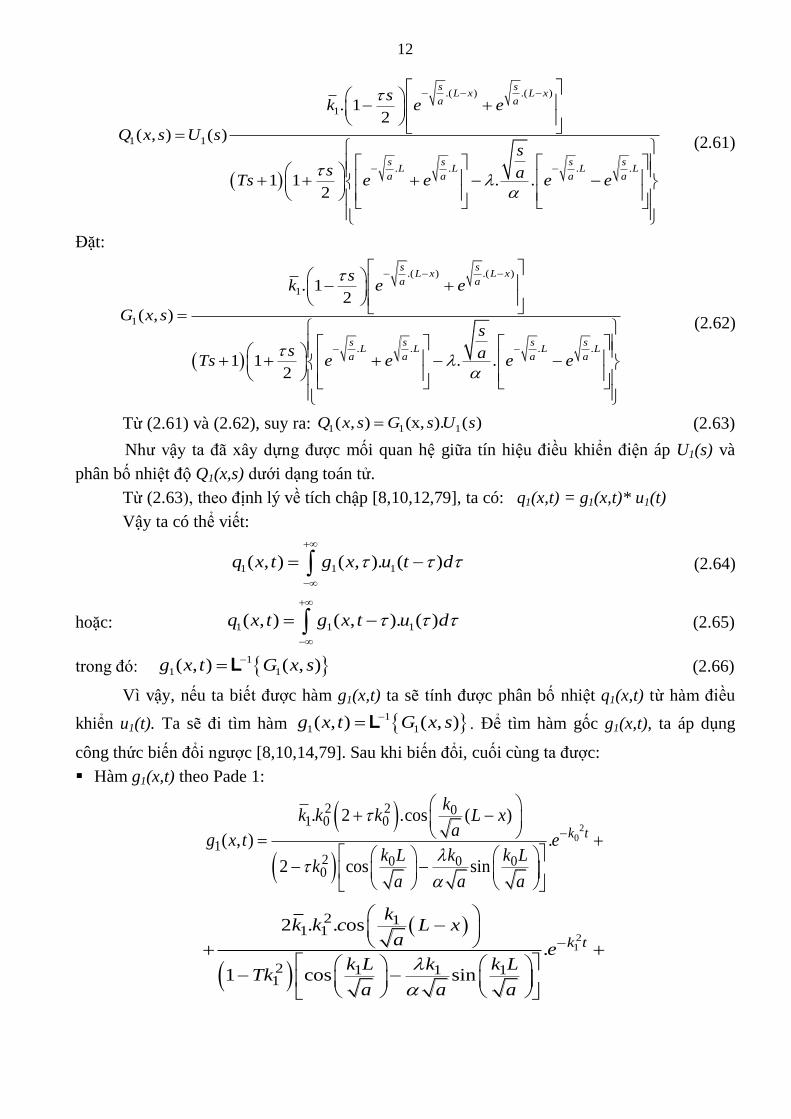
Từ (2.61) và (2.62), suy ra: 1 1 1( , ) (x, ). ( )Q x s G s U s (2.63)
Như vậy ta đã xây dựng được mối quan hệ giữa tín hiệu điều khiển điện áp U1(s) và
phân bố nhiệt độ Q1(x,s) dưới dạng toán tử.
Từ (2.63), theo định lý về tích chập [8,10,12,79], ta có: q1(x,t) = g1(x,t)* u1(t)
Vậy ta có thể viết:
1 1 1( , ) ( , ). ( )q x t g x u t d
(2.64)
hoặc: 1 1 1( , ) ( , ). ( )q x t g x t u d
(2.65)
trong đó: 1
1 1( , ) ( , )g x t G x sL (2.66)
Vì vậy, nếu ta biết được hàm g1(x,t) ta sẽ tính được phân bố nhiệt q1(x,t) từ hàm điều
khiển u1(t). Ta sẽ đi tìm hàm 1
1 1( , ) ( , )g x t G x sL . Để tìm hàm gốc g1(x,t), ta áp dụng
công thức biến đổi ngược [8,10,14,79]. Sau khi biến đổi, cuối cùng ta được:
Hàm g1(x,t) theo Pade 1:
20
2 2 01 0 0
12 0 0 00
. 2 .cos ( )
( , ) .
2 cos sin
k t
kk k k L x
ag x t e
k L k k Lk
a a a
21
2 11 1
2 1 1 11
2 . . os
.
1 cos sin
k t
kk k c L x
ae
k L k k LTk
a a a

13
2
21
2 22
2 2 . os ( )
.. .
1 2 . sin os.
i
ii
t
i iii i
i
k c L xa
eL L L L
T caa a a
(2.94)
Để tìm phân bố nhiệt độ q2(x,t) với t nằm trong khoảng Δt2 =t1÷t2 và phân bố nhiệt độ
q3(x,t) với t nằm trong khoảng Δt3 =t2÷tf , ta cũng biến đổi tương tự như trường hợp tìm q1(x,t),
cuối cùng ta cũng được kết quả như sau:
Hàm g2(x,t) theo Pade 1:
20
2 2 02 0 0
22 0 0 00
. 2 .cos ( )
( , ) .
2 cos sin
k t
kk k k L x
ag x t e
k L k k Lk
a a a
21
2 12 1
2 1 1 11
2 . . os
.
1 cos sin
k t
kk k c L x
ae
k L k k LTk
a a a
2
22
2 22
2 2 . os ( )
.. .
1 2 . sin os.
i
ii
t
i iii i
i
k c L xa
eL L L L
T caa a a
(2.95)
Hàm g3(x,t) theo Pade 1:
20
2 2 03 0 0
32 0 0 00
. 2 .cos ( )
( , ) .
2 cos sin
k t
kk k k L x
ag x t e
k L k k Lk
a a a
21
2 13 1
2 1 1 11
2 . . os
.
1 cos sin
k t
kk k c L x
ae
k L k k LTk
a a a
2
23
2 22
2 2 . os ( )
.. .
1 2 . sin os.
i
ii
t
i iii i
i
k c L xa
eL L L L
T caa a a
(2.96)

14
0 1 / ;k T 1 2 /k ; 1;k 2;k 3k là các hệ số truyền tĩnh của lò ứng với các khoảng thời
gian Δt1; Δt2; Δt3. Trường hợp khâu trễ se được thay thế bằng phép xấp xỉ Taylor thì phương
trình (2.42) trở thành:
11 1 1 1
( )( 1) ( ) . ( ).e
1
s U sTs V s k U s k
s
(2.42)’
Để tìm các hàm gμ(x,t) ( 1 3 ) ứng với 3 trường hợp của hệ số k , ta biến đổi tương tự như
trường hợp Pade 1, cuối cùng ta cũng được kết quả các hàm gμ(x,t) theo khai triển Taylor.
Trong các biểu thức (2.94), (2.95) và (2.96) các i được tính từ công thức:
/ i i a L ; với i là nghiệm của phương trình: . / itg L B ; Bi là hệ số BIO của
vật liệu; là hệ số truyền nhiệt từ không gian lò vào vật (w/m2.độ); là hệ số dẫn nhiệt của
vật cần gia nhiệt (w/m.độ); L là bề dày vật nung (m); a là hệ số dẫn nhiệt độ (m2/s); là thời
gian trễ của lò (s); T là hằng số thời gian của lò (s)
2.5.2. Tìm lời giải cho hàm phân bố trường nhiệt độ q(x,t)
Tại mỗi thời điểm t (0 ≤ t ≤ tf ), hàm q(x,t) được tính tương ứng với 3 trường hợp:
+ Nếu 0 ≤ t ≤ t1 thì:
1
0
( , ) ( , ). ( )
t
q x t g x t u d (2.116)
+ Nếu t1 ≤ t ≤ t2 thì:
1
1
1 2
0
( , ) ( , ). ( ) ( , ). ( )
t t
t
q x t g x t u d g x t u d (2.117)
+ Nếu t2 ≤ t ≤ tf thì:
1 2
1 2
1 2 3
0
( , ) ( , ). ( ) ( , ). ( ) ( , ). ( )
t t t
t t
q x t g x t u d g x t u d g x t u d (2.118)
o Kết luận: Ta đã giải được một hệ thống gồm phương trình vi phân đạo hàm riêng dạng
Parabolic với điều kiện biên loại 3 (quan hệ giữa v(t) và q(x,t)) kết hợp với phương trình vi
phân thường có trễ, phi tuyến (quan hệ giữa u(t) và v(t)). Như vậy, nếu chưa quan tâm tới bài
toán tối ưu thì ta có thể tính được trường nhiệt độ trong vật nung khi biết điện áp cung cấp cho
lò (bài toán biết vỏ tìm lõi).
Trường hợp tổng quát: Quan hệ giữa điện áp cung cấp cho lò u(t) và phân bố trường
nhiệt độ trong vật nung q(x,t) được tính theo các công thức (2.116), (2.117) và (2.118) tương
ứng với 3 miền thời gian phân chia theo hệ số ik (i=1,2,3).
2.5.3. Lời giải bài toán điều khiển tối ưu
2.5.3.1. Đặt bài toán
Sau khi tìm được quan hệ giữa q(x,t) và u(t) dưới dạng phương trình tích phân như ở
mục 2.5.2, bài toán được đặt ra: Hãy xác định hàm điều khiển tối ưu u*(t) với (0 t tf ) sao
cho làm cực tiểu phiếm hàm mục tiêu:

15
2
0
J *( ) ( , t )
L
c fq x q x dx (2.119)
trong đó q*(x) là phân bố nhiệt độ cho trước còn q(x,tf ) là phân bố nhiệt độ trong vật nung tại
thời điểm cuối quá trình nung t = tf.
Thay t = tf vào công thức (2.118) sẽ được hàm q(x,tf ):
1 2
1 2
1 2 3
0
( , t ) ( , ). ( ) ( , ). ( ) ( , ). ( )
ftt t
f f f f
t t
q x g x t u d g x t u d g x t u d (2.120)
trong đó các hàm g1(x,t), g2(x,t) và g3(x,t) được tính từ các công thức (2.94), (2.95) và (2.96),
với tf là thời gian nung cho phép tính bằng giây (s).
Thay (2.120) vào (2.119) sẽ có dạng thức của Jc.
2.5.3.2. Tìm tín hiệu điều khiển tối ưu u*(t) bằng phương pháp số
Để tìm u*(t) ta phải cực tiểu hoá phiếm hàm (2.121):
2
0
J *( ) ( , t )
L
c fq x q x dx
1 2
1 2
2
1 1 2 2 3 3
0 0
*( ) ( , ). ( ) ( , ). ( ) ( , ). ( )
ftt tL
f f f
t t
q x g x t u d g x t u d g x t u d dx
(2.121)
Trước hết ta dùng phương pháp tích phân số [10,11,13,15], áp dụng công thức Simson
đối với tích phân vế trái của phiếm hàm (2.121). Khoảng không gian là bề dày tấm từ 0 đến L
ta chia làm n phần bằng nhau (n là một số chẵn).
Lúc đó ta có thể biểu thị hàm mục tiêu Jc như sau:
2
0
J [ *] *( ) ( , t )n
c i i i f
i
u L q x q x
(2.122)
trong đó: i là các trọng số gán cho giá trị của hàm dưới dấu tích phân tại điểm xi . Các giá trị xi
và trọng số i là biết trước với mỗi công thức tích phân. Nếu dùng công thức Simson, các giá
trị của xi và i được xác định như sau [10,79]:
0
1 3 1
2 4 2
/
1/ 3
4 / 3
2 / 3
i
n
n
n
x iL n
n
n
n
với 0,1,...,i n và n là một số chẵn (2.123)
Do q(xi,tf ) trong (2.122) được xác định theo (2.120) nên để tính [ *]cJ u ta áp dụng một
lần nữa công thức tích phân số Simson và áp dụng tương tự đối với vế phải của (2.121).
Khoảng thời gian từ 0 đến tf được chia ra ba khoảng thời gian bằng nhau là 0÷t1; t1÷t2 và t2÷tf ,
trong đó: - Khoảng thời gian từ 0 đến t1 ta chia ra thành m1 khoảng bằng nhau.
- Khoảng thời gian từ t1 đến t2 ta chia ra thành m2 khoảng bằng nhau.
- Khoảng thời gian từ t2 đến tf ta chia ra thành m3 khoảng bằng nhau.
(với m1 , m2 , m3 cũng là một số chẵn).

16
Khi đó giá trị của q(xi,tf ) được tính :
1 2
1 1 1 2 2 2
1 2
1 1 1 2 1 2 2
0 0
( , ) ( , ). ( ) ( ) ( , ). ( )m m
i f j i f j j j i f j j
j j
q x t t g x t u t t g x t u
3
3 3 3
3
2 3 3
0
( ) ( , ). ( )m
f j i f j j
j
t t g x t u
(2.124)
trong đó: các giá trị của 1j
;2j
;3j
và 1j
;2j
;3j
được xác định như sau:
1
1
1
1
1 1 1
0 1
1 3 1 1
2 4 2 1
/
1/ 3
4 / 3
2 / 3
j
m
m
m
j t m
m
m
m
2
2
2
2
2 2 1 2
0 2
1 3 1 2
2 4 2 2
( ) /
1/ 3
4 / 3
2 / 3
j
m
m
m
j t t m
m
m
m
3
3
3
3
3 2 3
0 3
1 3 1 3
2 4 2 3
( ) /
1/ 3
4 / 3
2 / 3
j f
m
m
m
j t t m
m
m
m
(2.125)
với 1 10,1,...,j m ; 2 20,1,...,j m ; 3 30,1,...,j m .Đặt:1 1 11ij 1 1. . ( , );j i f jc t g x t
2 2 22ij 2 1 2( ). . ( , );j i f jc t t g x t
3 3 33ij 2 3( ). . ( , );f j i f jc t t g x t
1 11 j( )ju u ;
2 22 j( )ju u ;3 33 j( )ju u ;
1 2 3jj j ju u u u ;**( )i iq x q (2.126)
1 1 1m mu u là điểm nối điện áp điều khiển tại thời điểm t1 .
1 2 1 21 2m m m mu u là điểm nối điện áp điều khiển tại thời điểm t2.
thay (2.124); (2.125) và (2.126) vào (2.122), ta được :
31 2
1 1 2 2 3 3
1 2 3
2
* *
1ij j 2ij j 3ij j
0 0 0 0
J [ ] . . .mm mn
c i i
i j j j
u L q c u c u c u
(2.127)
Ràng buộc của hàm điều khiển (giới hạn điện áp cung cấp cho lò) được viết là:
U1 uj U2 (j = 0,1,2,…,m ) với m = m1 + m2 + m3 (2.128)
trong đó: U1 là giới hạn dưới điện áp, U2 là giới hạn trên điện áp
Như vậy, bài toán được đặt ra là hãy tìm cực tiểu của hàm (2.127) với mj+1 biến uj tuân theo
ràng buộc (2.128). Bài toán trở thành bài toán quy hoạch bậc hai [8,10,79]. Bài toán này có thể tìm
nghiệm đúng bằng phương pháp số sau một số hữu hạn phép lặp.
2.6. Tính toán các giới hạn khi giải bài toán nung chính xác nhất.
2.7. Tính toán nhiệt độ lò v(t) và sự phân bố nhiệt độ trong vật q(x,t)
2.7.1. Đặt vấn đề
2.7.2. Tính toán nhiệt độ lò v(t)
Nhiệt độ lò v(t) được tính như sau:
1 2 3 1 2 3.( ). ( 1) ( 1).[ ( )]( )
k l l l j v j T l l lv j
u
T
(2.170)
với 0,1,2... ;j m 1 1 1/ ;l t m 2 2 1 2( ) / ;l t t m 3 2 3( ) / ;fl t t m
1 / 3;ft t 2 2 / 3ft t ; tf là thời gian nung cho phép (s), max 3k k k ;
m1 , m2 , m3 là số khoảng thời gian tương ứng với khoảng thời gian t1 ; t2 ;t3.
T là hằng số thời gian của lò (s).
Như vậy khi đã biết u*(t) ta có thể tính được v(t) từ phương trình (2.170).

17
2.7.3. Tính toán phân bố nhiệt độ trong vật nung q(x,t)
Để tính q(x,t) khi biết u*(t) ta cũng dùng phương pháp số [8,10,13,15].
Phân bố nhiệt độ trong toàn bộ vật nung trong khoảng thời gian từ 0 tf được tính như sau:
1 2
1 1 1 1 1 2 2 2 2 21 2
0 0
( , ) . ( , ). ( ) . ( , ). ( )j j
i i iq x t j l g x j l j l g x j lu u
3
33 3 3 3 3
0
. ( , ). ( )j
ij l g x j ul
(2.83)
với 0 ft t ; 1 / 3ft t ; 2 2 / 3ft t .
2.8. Kết luận chƣơng 2:
Chương 2 là nội dung trọng tâm (đóng góp chính thứ nhất) của luận án, chương này đã
giải quyết được một số vấn đề sau:
- Thành lập bài toán điều khiển tối ưu cho hệ với tham số phân bố, có trễ, phi tuyến
- Nhận dạng mô hình lò điện trở và phân tích tính phi tuyến của hệ số truyền tĩnh k của lò.
- Đã thay thế khâu trễ se trong khâu quán tính bậc nhất, có trễ (lò điện trở) bằng phép xấp xỉ
Pade 1 khi đối tượng điều khiển có tỷ số T/ thỏa mãn điều kiện 6 T/ < 10 [7].
- Đã đưa ra được lời giải tường minh cho bài toán tìm trường nhiệt độ của vật nung (dạng tấm
phẳng) khi biết điện áp cung cấp cho lò - xét cả trong trường hợp hệ số truyền tĩnh k của lò là
phi tuyến và thời gian trễ của lò lớn.
- Đã tìm ra lời giải cho bài toán điều khiển tối ưu hệ với tham số phân bố, có trễ, phi tuyến
bằng phương pháp số – Hệ này ứng dụng cho bài toán nung chính xác nhất trong quá trình
gia nhiệt.
- Đã tính toán các điều kiện giới hạn của bài toán tối ưu cũng như đưa ra các thuật toán để tính
nhiệt độ lò v(t) và phân bố nhiệt độ trong vật nung q(x,t).
CHƢƠNG 3
CÁC CHƢƠNG TRÌNH TÍNH TOÁN VÀ CÁC KẾT QUẢ MÔ PHỎNG
3.1. Đặt vấn đề
3.2. Các chƣơng trình tính
3.2.1 Chương trình tính các giá trị i
3.2.2 Tính giá trị hàm g(x,t)
3.2.3 Chương trình tính hàm g1(x,t-)
3.2.4. Chương trình giải bài toán tối ưu
3.3. Các kết quả mô phỏng chính
3.3.1- Mô phỏng với mẫu Samot
= 60 (w/m2
độ); = 0.955 (w/mđộ); a = 4.86.10-7
(m2/s); L = 0.03 (m); T = 1200 (s);
= 130 (s); 1 1,8;k 2 3,3;k 3 5k ; q* = 300
0C; tf = 4200 (s); U1 = 125 V; U2 = 205 V.
.L/ 60.0,03/ 0.955 1,9Bi ; 6 / 1200 /130 9,2 10T

18
Đây là vật dầy vì có hệ số Bi >> 0,5. Chọn số lớp không gian là n=4, số khoảng thời gian
m1 =m2=m3=m= 16. Sau khi chạy chương trình ta được kết quả như hình 3.2
Hình 3.2: Thực hiện chế độ nung tối ưu với mẫu Samot (sai số e 0)
3.3.2- Mô phỏng với mẫu Diatomite
= 60 (w/m2
độ); = 0.2 (w/mđộ); a = 3.6.10-7
(m2/s); L = 0.04 (m); T = 1200 (s);
= 130 (s); 1 1,8;k 2 3,3;k 3 5k ; q* = 400
0C; tf = 4500 (s); U1 = 125 V; U2 = 220 V.
.L/ 60.0,04 / 0.2 12Bi ; 6 / 1200 /130 9,2 10T
Đây cũng là vật dầy vì có Bi >> 0,5. Chọn số lớp không gian là n=10, số khoảng thời gian
m1 =m2=m3=m= 100.
Sau khi chạy chương trình ta được kết quả như hình 3.15
Hình 3.15: Thực hiện chế độ nung tối ưu với mẫu Diatomite (sai số e 0.003)
Nhận xét: Trên hình 3.2 và hình 3.15 thì U*(t) là tín hiệu điều khiển tối ưu (điện áp tối ưu);
v(t) là nhiệt độ lò; q(x,t) là trường nhiệt độ trong vật nung (đồ thị biểu diễn nhiệt độ của bề mặt,
nhiệt độ các lớp bên trong và nhiệt độ lớp dưới cùng của vật), e là sai số của hàm mục tiêu Jc.
Tại thời điểm cuối của quá trình nung t = tf , phân bố nhiệt độ tại các lớp trong vật nung q(x,tf )
đều xấp xỉ nhiệt độ đặt q*.
Như vậy lời giải tối ưu đã được kiểm chứng.
v(t)
U*(t)
q(x,t)
q(x,tf)=q*
q*=q*=
v(t)
U*(t)
q(x,t)
q*
q(x,tf)

19
So sánh nghiệm tối ưu khi thay thế khâu trễ se bằng phép xấp xỉ Taylor và phép
xấp xỉ Pade bậc một (phần mở rộng của luận án).
Kết quả mô phỏng với mẫu Samot được thể hiện ở hình 3.3 và hình 3.4.
Hình 3.3: Thực hiện chế độ nung tối ưu với mẫu Samot với n=6, m1=m2=m3=40
Sai số e = 3.9104.e-08 (Theo Taylor)
Hình 3.4: Thực hiện chế độ nung tối ưu với mẫu Samot với n=6, m1=m2=m3=40
Sai số e =5.8559.e-10 (Theo Pade 1)
Nhận xét: Kết quả mô phỏng trên hình 3.3 và hình 3.4 ta thấy, khi khâu trễ se được
thay thế gần đúng bằng phép xấp xỉ Pade 1 thì sai số của hàm mục tiêu Jc (e =5.8559.e-10) nhỏ
hơn so với trường hợp khi khâu trễ được thay thế gần đúng bằng phép xấp xỉ Taylor với
(e = 3.9104.e-08), nghĩa là bài toán tối ưu có độ chính xác cao hơn.
v(t)
U*(t)
q(x,t)
q(x,tf) q*
v(t)
U*(t)
q(x,t)
q(x,tf)
q*
20
3.4. Kết luận chƣơng 3
Như vậy, thông qua các kết quả mô phỏng có thể khẳng định rằng việc giả thiết tuyến tính
hóa hệ số truyền tĩnh k trong khoảng nhiệt độ cho trước vf ra thành 3 giá trị là 1;k 2;k 3k và khi
áp dụng phương pháp số để giải bài toán điều khiển tối ưu như ở chương 2 thì độ chính xác của
lời giải có thể chấp nhận được, tức là sai lệch (e) giữa phân bố nhiệt độ tại các lớp trong vật nung
q(x,t) so với phân bố nhiệt độ cho trước q* tại thời điểm cuối quá trình nung t=tf là rất nhỏ, đặc
biệt với đối tượng nhiệt thì việc sai số nhiệt độ như trên hoàn toàn chấp nhận được. Nội dung
trong chương 3 là đóng góp chính thứ hai của luận án.
CHƢƠNG 4
THỰC NGHIỆM KIỂM CHỨNG CHẤT LƢỢNG PHƢƠNG PHÁP ĐÃ ĐỀ XUẤT
TRÊN MÔ HÌNH HỆ THỐNG THỰC
4.1. Giới thiệu mô hình hệ thống thí nghiệm
Thí nghiệm nhằm mục đích kiểm tra tính đúng đắn của các thuật toán, chương trình tối ưu
đã được tính toán bằng mô phỏng và để kiểm tra độ chính xác mô hình toán học của đối tượng
cũng như các thông số vật lý của lò nhiệt và vật nung.
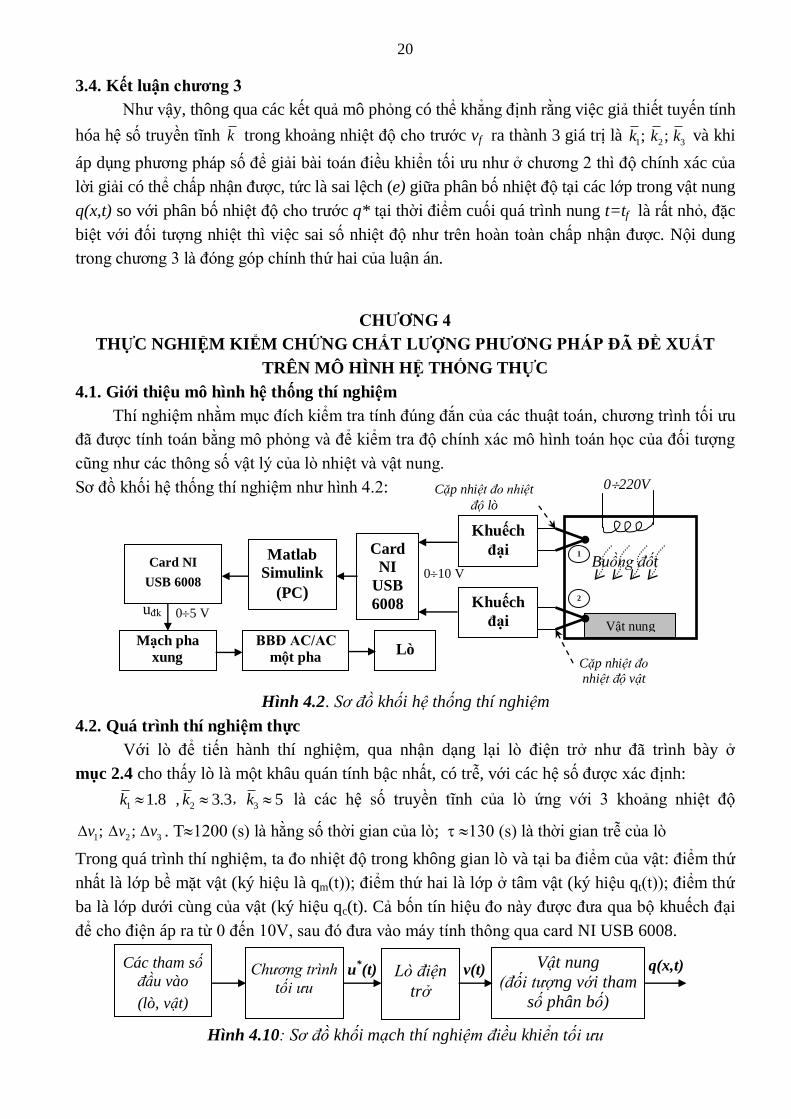
Sơ đồ khối hệ thống thí nghiệm như hình 4.2:
Hình 4.2. Sơ đồ khối hệ thống thí nghiệm
4.2. Quá trình thí nghiệm thực
Với lò để tiến hành thí nghiệm, qua nhận dạng lại lò điện trở như đã trình bày ở
mục 2.4 cho thấy lò là một khâu quán tính bậc nhất, có trễ, với các hệ số được xác định:
1 1.8k , 2 3.3k , 3 5k là các hệ số truyền tĩnh của lò ứng với 3 khoảng nhiệt độ
1;v 2 ;v 3v . T1200 (s) là hằng số thời gian của lò; 130 (s) là thời gian trễ của lò
Trong quá trình thí nghiệm, ta đo nhiệt độ trong không gian lò và tại ba điểm của vật: điểm thứ
nhất là lớp bề mặt vật (ký hiệu là qm(t)); điểm thứ hai là lớp ở tâm vật (ký hiệu qt(t)); điểm thứ
ba là lớp dưới cùng của vật (ký hiệu qc(t). Cả bốn tín hiệu đo này được đưa qua bộ khuếch đại
để cho điện áp ra từ 0 đến 10V, sau đó đưa vào máy tính thông qua card NI USB 6008.
Hình 4.10: Sơ đồ khối mạch thí nghiệm điều khiển tối ưu
Các tham số
đầu vào
(lò, vật)
Chương trình
tối ưu Lò điện
trở
Vật nung
(đối tượng với tham
số phân bố)
u*(t) v(t) q(x,t)
0220V
Vật nung
Buồng đốt
Khuếch
đại
Khuếch
đại
Cặp nhiệt đo
nhiệt độ vật
Cặp nhiệt đo nhiệt
độ lò
Card
NI
USB
6008
010 V
Matlab
Simulink
(PC)
Card NI
USB 6008
Mạch pha
xung
BBĐ AC/AC
một pha
Lò
05 V uđk
1
2

21
Trong sơ đồ khối hình 4.10 thì các tham số của lò và vật đã biết còn chương trình tối ưu
đã được tính toán từ lời giải của bài toán tối ưu, chương trình này tạo ra điện áp tối ưu đặt vào
lò. Đường điện áp tối ưu u*(t) có dạng xung vuông, tiếp theo là lò điện trở (đối tượng có trễ, phi
tuyến), cuối cùng là vật nung (đối tượng với tham số phân bố). Từ sơ đồ khối hình 4.10, ta có
sơ đồ mạch thí nghiệm thực như hình 4.11.
Hình 4.11: Sơ đồ mạch thí nghiệm thực
4.3. Một số kết quả thí nghiệm
4.3.1. Thí nghiệm với mẫu Samot
4.3.1.1. Thí nghiệm 1. Tiến hành thí nghiệm với một mẫu Samot có các thông số sau:
L = 0,03 (m); a = 4,86.10-7
(m2/s); = 0.955 (W/m.độ); q
* = 300
0C; tf =4200 (s)
U1 = 125 (V); U2 =205 (V). Kết quả thí nghiệm thực như hình 4.12
Hình 4.12: Kết quả thí nghiệm với mẫu Samot (q
*=300
0C)
v(t)
U*(t)
qm(t)
qt(t) qc(t)
q*
22
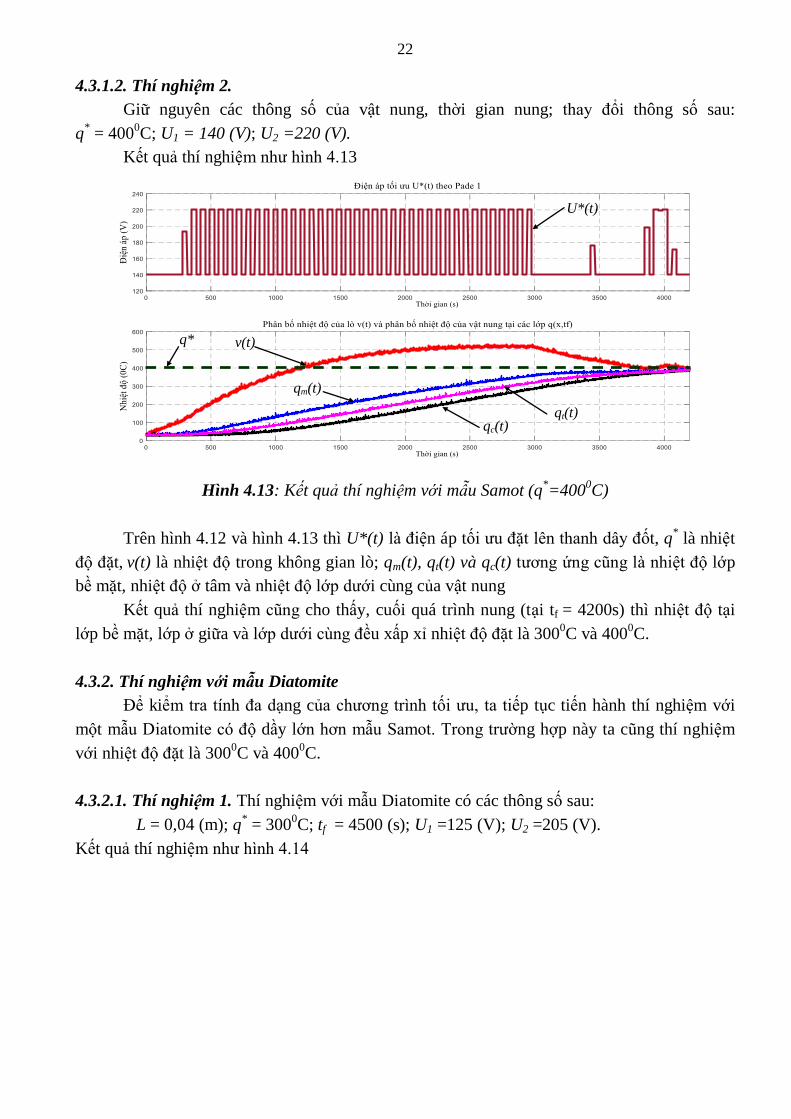
4.3.1.2. Thí nghiệm 2.
Giữ nguyên các thông số của vật nung, thời gian nung; thay đổi thông số sau:
q* = 400
0C; U1 = 140 (V); U2 =220 (V).
Kết quả thí nghiệm như hình 4.13
Hình 4.13: Kết quả thí nghiệm với mẫu Samot (q
*=400
0C)
Trên hình 4.12 và hình 4.13 thì U*(t) là điện áp tối ưu đặt lên thanh dây đốt, q* là nhiệt
độ đặt, v(t) là nhiệt độ trong không gian lò; qm(t), qt(t) và qc(t) tương ứng cũng là nhiệt độ lớp
bề mặt, nhiệt độ ở tâm và nhiệt độ lớp dưới cùng của vật nung
Kết quả thí nghiệm cũng cho thấy, cuối quá trình nung (tại tf = 4200s) thì nhiệt độ tại
lớp bề mặt, lớp ở giữa và lớp dưới cùng đều xấp xỉ nhiệt độ đặt là 3000C và 400
0C.
4.3.2. Thí nghiệm với mẫu Diatomite
Để kiểm tra tính đa dạng của chương trình tối ưu, ta tiếp tục tiến hành thí nghiệm với
một mẫu Diatomite có độ dầy lớn hơn mẫu Samot. Trong trường hợp này ta cũng thí nghiệm
với nhiệt độ đặt là 3000C và 400
0C.
4.3.2.1. Thí nghiệm 1. Thí nghiệm với mẫu Diatomite có các thông số sau:
L = 0,04 (m); q* = 300
0C; tf = 4500 (s); U1 =125 (V); U2 =205 (V).
Kết quả thí nghiệm như hình 4.14
v(t)
U*(t)
qt(t) qc(t)
q*
qm(t)
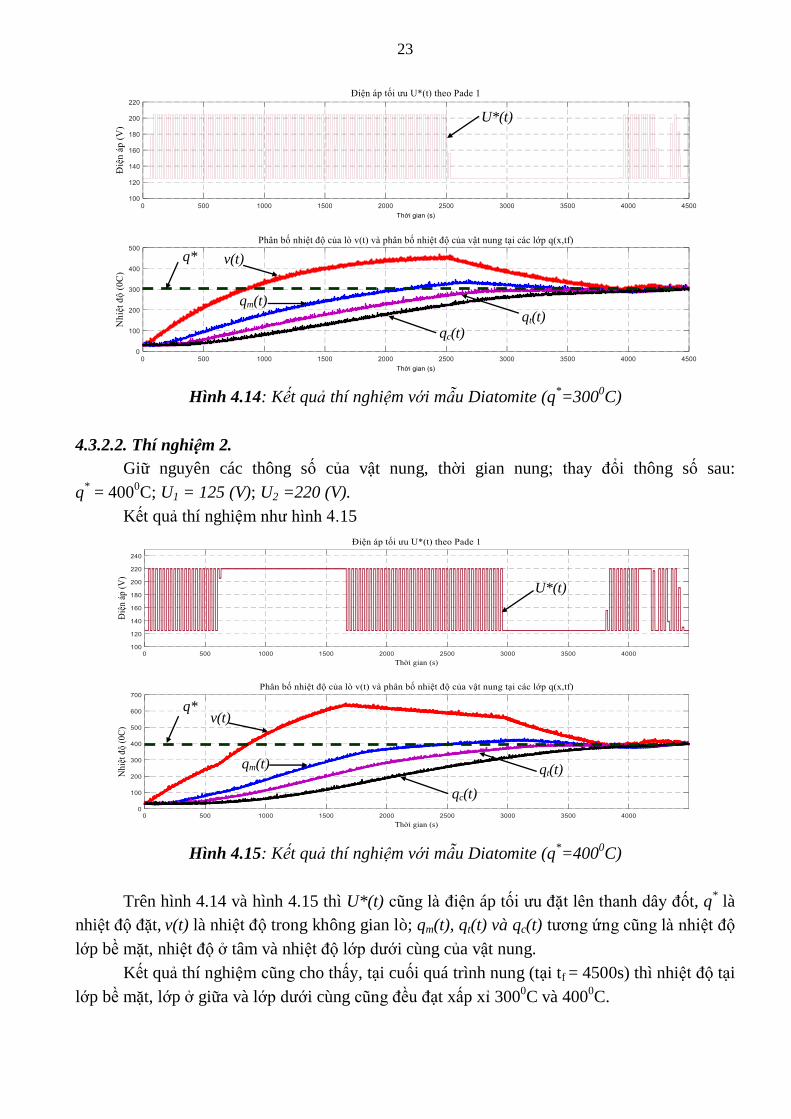
23
Hình 4.14: Kết quả thí nghiệm với mẫu Diatomite (q
*=300
0C)
4.3.2.2. Thí nghiệm 2.
Giữ nguyên các thông số của vật nung, thời gian nung; thay đổi thông số sau:
q* = 400
0C; U1 = 125 (V); U2 =220 (V).
Kết quả thí nghiệm như hình 4.15
Hình 4.15: Kết quả thí nghiệm với mẫu Diatomite (q*=400
0C)
Trên hình 4.14 và hình 4.15 thì U*(t) cũng là điện áp tối ưu đặt lên thanh dây đốt, q* là
nhiệt độ đặt, v(t) là nhiệt độ trong không gian lò; qm(t), qt(t) và qc(t) tương ứng cũng là nhiệt độ
lớp bề mặt, nhiệt độ ở tâm và nhiệt độ lớp dưới cùng của vật nung.
Kết quả thí nghiệm cũng cho thấy, tại cuối quá trình nung (tại tf = 4500s) thì nhiệt độ tại
lớp bề mặt, lớp ở giữa và lớp dưới cùng cũng đều đạt xấp xỉ 3000C và 400
0C.
v(t)
U*(t)
qm(t) qt(t)
qc(t)
q*
v(t)
U*(t)
qm(t) qt(t)
qc(t)
q*

24
4.4. Kết luận chƣơng 4
Sau khi tiến hành thí nghiệm thực trên hai mẫu vật nung là Samot và Diatomite để kiểm
chứng một số các kết quả mô phỏng ta có một số kết luận sau:
- Từ các kết quả thí nghiệm, ta thấy phân bố nhiệt độ q(x,tf) tại các lớp trong vật nung tại
thời điểm cuối của quá trình nung đều đạt gần giá trị nhiệt độ mong muốn q*, tức là thỏa mãn
yêu cầu của bài toán nung chính xác nhất.
- Kết quả thí nghiệm phản ánh chính xác các thuật toán và chương trình tối ưu đã được
tính toán.
- Kết quả thí nghiệm đã chứng minh tính chính xác và tính ổn định của nghiệm tối ưu.
Kết quả chương 4 là đóng góp chính thứ ba của luận án.
KẾT LUẬN
Với mục tiêu tìm ra lời giải cho bài toán điều khiển tối ưu cho hệ với tham số phân bố,
có trễ, phi tuyến bằng phương pháp số. Hệ này được đặc trưng bằng quá trình truyền nhiệt một
phía trong lò điện trở để điều khiển nhiệt độ cho vật nung có dạng tấm phẳng (xét với vật dầy)
theo tiêu chuẩn nung chính xác nhất.
Kết quả nghiên cứu của luận án đã có một số kết quả đóng góp mới như sau:
1. Ứng dụng phép biến đổi Laplace, phương pháp tuyến tính hóa từng đoạn và khai triển Pade
đã đưa ra lời giải tường minh cho bài toán tìm được trường nhiệt độ của vật nung khi biết
điện áp cung cấp cho lò - xét cả trong trường hợp hệ số truyền tĩnh k của lò là phi tuyến và
thời gian trễ của lò lớn.
2. Tìm ra lời giải cho bài toán điều khiển tối ưu hệ với tham số phân bố, có trễ, phi tuyến bằng
phương pháp số, có tính tới cả điều kiện giới hạn pha – Hệ này ứng dụng cho bài toán nung
chính xác nhất trong quá trình gia nhiệt.
3. Đã mô phỏng và tiến hành thực nghiệm để kiểm chứng kết quả nghiên cứu với mô hình lò
điện trở gia nhiệt một phía cho vật nung dạng tấm phẳng.
HƢỚNG NGHIÊN CỨU TIẾP THEO
Nghiên cứu bài toán điều khiển tối ưu quá trình gia nhiệt theo mục tiêu nung chính xác nhất
trong lò nung tĩnh với các hình dạng khác nhau như: hình trụ, hình xuyến, hình ovan…
Nghiên cứu bài toán truyền nhiệt theo ba chiều (ba phía) để giảm thời gian nung.
Giải bài toán điều khiển tối ưu cho hệ với tham số phân bố, có trễ, phi tuyến khi xét các hệ
số a, của vật là phi tuyến.





























