-
UNIVERSIDADE FEDERAL DE MINAS GERAIS ESCOLA DE ENGENHARIA
CURSO DE GRADUAO EM ENGENHARIA DE CONTROLE E AUTOMAO PROJETO DE
FIM DE CURSO
APLICAES DE TCNICAS DE CONTROLE AVANADO A UMA MALHA DE CONTROLE
DE pH
Hamilton Guilherme de Oliveira Jnior
Orientador: Prof. Fbio Gonalves Jota Supervisor: Eng Daniel Codo
de Faria
Belo Horizonte 2007
-
2
UNIVERSIDADE FEDERAL DE MINAS GERAIS
ESCOLA DE ENGENHARIA CURSO DE GRADUAO EM ENGENHARIA DE CONTROLE
E AUTOMAO
PROJETO DE FIM DE CURSO
APLICAES DE TCNICAS DE CONTROLE AVANADO A UMA MALHA DE CONTROLE
DE pH
Hamilton Guilherme de Oliveira Jnior
Orientador: Prof. Fbio Gonalves Jota Supervisor: Eng Daniel Codo
de Faria
Belo Horizonte 2007
Monografia submetida banca examinadora designada pelo Colegiado
Didtico do Curso de Engenharia de Controle e Automao da
Universidade Federal de Minas Gerais como requisito parcial obteno
do ttulo de Bacharel em Engenharia de Controle e Automao.
-
3
APLICAES DE TCNICAS DE CONTROLE AVANADO A UMA MALHA DE CONTROLE
DE pH
Hamilton Guilherme de Oliveira Jnior
Monografia submetida banca examinadora designada pelo Colegiado
Didtico do Curso de Engenharia de Controle e Automao da
Universidade Federal de Minas Gerais como requisito parcial obteno
do ttulo de Bacharel em Engenharia de Controle e Automao.
Trabalho aprovado em 27 de junho de 2007
BANCA EXAMINADORA
__________________________________________________________
Fbio Gonalves Jota, PhD, DELT-UFMG
__________________________________________________________
Daniel Codo de Faria, Engenheiro, PPGEE-UFMG
__________________________________________________________
Patrcia Nascimento Pena, Doutora, CNPQ-UFMG
-
4
Agradecimentos
Quero agradecer emprimeiro lugar minha famlia,que sempremedeu
apoio e
fora em todas as decises que tomei, e queme amparava nosmomentos
de incerteza.
Principalmenteaosmeuspais,pormeeducaremdamelhorformapossvel.
Meus amigos tambm foramparte importantenessa caminhada.Tambm
sempre
mediziampalavrasde incentivoquandopensavaqueno
fosseconseguiressavitria.
elesdevopartedasforasportersemprepersistido.
Ao orientador Fbio Jota que, apesar de tantas tarefas, aceitoume
orientar nesse
projeto. Seus ensinamentos foram de grande valia e me ajudaram a
vencer todas as
dificuldades enfrentadasneste trabalho.Ao
supervisorDanielCodopor termedado as
direesiniciaisparaestetrabalho,semasquaisteriaperdidoumtempomuitogrande.
AoGilberto,por
termeauxiliadoporvriasvezesnopreparodassoluescidas
queforamgastasemgrandequantidadeduranteostestes.
ADeus,portermeabenoadoepossibilitadoamimaconclusodestetrabalho.
-
5
Resumo
OcontroledepHusualmenteencontradonombitoindustrial,muitopresente,por
exemplo, emprocessosqumicos,biolgicos, farmacuticos, ena
indstria alimentcia.O
pH,oupotencialdehidrognioinico,umamedidadaconcentraodosonsH+emuma
soluo,sendoigualaologaritmonegativodessaconcentrao.Emoutraspalavras,ovalor
de pH indica o quo cida ou bsica uma soluo, sendo que valores
mais baixos
determinam solues mais cidas. Normalmente trabalhase na faixa de
0 a 14 pH,
indicandoqueaconcentraodosonssupracitadosvariaentre1014e1mol/l.
O controle de pH uma tarefa difcil de ser realizada,
principalmente devido
grandenolinearidadedesteprocesso.Oganhodoprocessopodevariaremmuitasordens
de grandeza dependendo do ponto de operao, o que exige uma
enorme preciso dos
atuadores,dossensoresedocontrolador.Aconstantedetempodoprocessotambmpode
variar,dependendodasvazesdoprocesso,porexemplo.Dentreoutros,estesproblemas
tornam o controle de pH objeto de estudos ainda nos tempos
atuais, principalmente
enfatizandocontroladoresmaisavanadosdoqueossimplesPIDs.
Neste trabalho, foramprojetadose
implementadosdoiscontroladoresadaptativos,
conhecidoscomoGMV(GeneralizedMinimumVariance)eGPC(GeneralizedPredictiveControl)
para tentar atingir um controle satisfatrio em uma planta piloto
localizada no LCPI
UFMG(LaboratriodeControledeProcessosIndustriaisdaUFMG).Umavantagemdestes
controladores a capacidadede adaptar seusparmetros em relao ao
comportamento
atual do processo. Para tanto, foram obtidos modelos do
processo, incluindo uma
modelagem dos efeitos da bomba peristltica existente na planta
piloto, que ainda no
haviasidofeita.Combasenessesmodelos,umsimuladorfoicriado,deformaapropiciar
uma plataforma para projeto e testes preliminares dos
controladores adaptativos. Uma
formadeadaptaros controladores online
foidesenvolvidaparaaplantapilotodevido
ausnciademediodavarivelmanipulada,umadificuldadenoprevistano
inciodo
projeto. Resultados experimentais do controlador GMV aplicado
planta real so
-
6
apresentados e comprovam um bom desempenho da malha de pH,
inclusive
comparativamente ao PID. Esperase que o Controlador Preditivo
Generalizado (GPC)
analisadoe testadoemestudos simuladosapresente,naplanta real,
resultadosprximos
aosdoGMV.
-
7
Abstract
The pH control is usually found in industrial environment, with
considerable
examplesinchemical,biological,pharmaceuticalandfoodprocesses.ThepH,orhydrogen
ionpotential, isameasureofH+ ionconcentrationofasolutionand
itisequivalenttothe
negative logarithmofthisconcentration.Inotherwords,thepHvalue
indicateshowacid
orbasicasolutionis,regardingthatlowerpHvaluesdetermineacidicsolutions.Normally,
pHisconsideredonlyinsidetherange0to14,whichcorrespondstoanionconcentration
thatvariesfrom1014to1mol/l.
ThepHcontrolisadifficulttask,mainlybecauseofthegreatprocessnonlinearity.
Theprocessgaincanvaryinmanyordersofmagnitudedependingontheoperatingpoint,
whichdemandsaconsiderableprecisionforactuators,sensorsandcontrollers.Theprocess
timeconstantcanalsovary,dependingontheprocessinandoutflowsforexample.Among
others, these problemsmake the pH control a target of studies
even nowadays,mainly
emphasizinginmoreadvancedcontrollersinrelationtothesimplePID.
In thiswork, twoadaptivecontrollersweredesignedand
implemented,knownas
GMV (GeneralizedMinimumVariance) andGPC (Generalized
PredictiveControl), in a
tentativetoreachasatisfactorycontrolofapilotplantlocatedatLCPIUFMG(Laboratrio
deControledeProcessos IndustriaisatUFMG).Anadvantageof these
controllers is the
abilityofautomaticallyadapting theirparameters tomatch the
currentprocessbehavior.
For that, processmodels were obtained, including themodeling of
a peristaltic pump
existent in thepilotplant,whichwasnotdonebefore.Basedon
theseprocessmodels,a
simulatorwascreatedinordertoperformasadesignandpreliminarytestingplatformfor
theadaptivecontrollers.Awaytoonlineadaptthecontrollerwasdevelopedforthepilot
plantsince
itdoesnthavethemanipulatedvariablemeasure,adifficultynotpredicted
in
the beginning of thiswork.Experimental results forGMV controller
applied to the real
plantarepresentedandproveagoodperformance for thepH loop
incomparison to the
PIDcontroller.ItisexpectedthattheGPCcontroller,analysedandtestedonlyinsimulated
-
8
studieswillpresent,whenappliedtotherealprocess,resultsthatareclosetothoseonesfor
GMV.
-
9
Sumrio 1. Introduo
.................................................................................................................................151.1.
MotivaodoProjeto
.......................................................................................................151.2.
EscopodoTrabalho..........................................................................................................201.3.
OrganizaodoTexto......................................................................................................22
2. DescriodaPlanta
.................................................................................................................243.
Metodologia..............................................................................................................................293.1.
ModelagemdoProcesso..................................................................................................293.1.1.
ModelagemdoProcessodepH
.............................................................................293.1.2.
ModelagemdoProcessodeNvel
.........................................................................333.1.3.
VariaodaVazodeBaseemRelaoAlturadoTanque
............................343.1.4.
SensordepH.............................................................................................................343.1.5.
BombasPeristlticas
................................................................................................353.1.6.
EfeitosdoAgitador..................................................................................................38
3.2. ControledeNvel
.............................................................................................................413.3.
ProjetodoSimulador
.......................................................................................................413.4.
ImplementaodosControladores................................................................................453.4.1.
EstimaodeParmetros
........................................................................................453.4.2.
ControladorProporcionalIntegralDerivativo(PID)..........................................493.4.3.
ControladordeVarinciaMnimaGeneralizado(GMV)...................................523.4.4.
ControladorPreditivoGeneralizado(GPC).........................................................57
3.5. ObservaesFinais
...........................................................................................................634.
ModelagemdoProcesso
.........................................................................................................644.1.
ModelagemdoProcessodepH......................................................................................644.2.
SensorpH
..........................................................................................................................664.3.
EfeitosdoAgitador
..........................................................................................................664.4.
BombasPeristlticas.........................................................................................................69
5.
SimulaoeImplementaodosControladores................................................................755.1.
Simulador
..........................................................................................................................755.2.
EstimaodeParmetrosOnline...................................................................................765.2.1.
ProblemadeDeterminaodaVazodecido..................................................765.2.2.
AdaptaodaEstimaodeParmetros
..............................................................77
5.3.
ImplementaoPID..........................................................................................................805.4.
ImplementaoGMV.......................................................................................................815.5.
ImplementaoGPC
........................................................................................................825.6.
ImplementaoemDelphi
..............................................................................................84
6. Resultados
.................................................................................................................................856.1.
ResultadosSimulados......................................................................................................856.1.1.
EfeitosdaBombaPeristltica
.................................................................................856.1.2.
ControlepeloPID.....................................................................................................87
-
10
6.1.3.
ControlepeloGMV..................................................................................................926.1.4.
ControlepeloGPC
...................................................................................................97
6.2. ResultadosnaPlantaPiloto
..........................................................................................1026.2.1.
PID............................................................................................................................1026.2.2.
GMV.........................................................................................................................105
6.3. ObservaesFinais
.........................................................................................................1117.
Concluso
................................................................................................................................1137.1.
ComentriosFinais.........................................................................................................1137.2.
SugestesparaTrabalhosFuturos
...............................................................................117
RefernciasBibliogrficas............................................................................................................119ApndiceIRelaodeTransformaoentrepHeY............................................................121ApndiceIIDeterminaoRecursivadosPolinmiosEj(z1)eFj(z1)naFormulaodoGPC...................................................................................................................................................123
-
11
Lista de Figuras FIGURA1
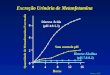
ProcessoIndustrialTpicodeControledepH....................................................16FIGURA2
CurvadeTitulaodeumProcessodeControledepH
...................................18FIGURA3
IlustrativodaPlantaPilotodeControledepH
..................................................25FIGURA4
ComponentesdeumaBombaPeristltica...........................................................37FIGURA5
FluxogramadeSequnciadePassosdeSimulao
...........................................43FIGURA6
DiagramadeBlocosdaMalhadeControleUtilizandoPID.............................51FIGURA7
DiagramadeBlocosdaMalhaFechadacomControladoresAdaptativos
.....53FIGURA8 DegraunoProcesso.
...............................................................................................67FIGURA9
RespostaComplementardaRespostaaoDegraudoProcesso
........................69FIGURA10
VelocidadedasRajadasxAodeControleNormalizadadaBombaPeristlticadeEnviodecidoaoTanquedeMistura.................................................................72FIGURA11
VazoMdiadeSadaxAodeControleNormalizadadaBombaPeristlticadeEnviodecidoaoTanquedeMistura.................................................................72FIGURA12
ConvergnciadosMtodosdeEstimaoOnlinede1em1(emvermelho)ede60em60segundos(emazul)viaSimulao............................................................................80FIGURA13
OscilaesSustentadasobtidasparaoganhocrticoKcu=1.419.600.
.............81FIGURA14
Efeitosdaimplementaodofiltroantispike.(a)antes;(b)depoisdaimplementao..
................................................................................................................................84FIGURA15
Testesimuladoemmanualparaverificaodosefeitosdabombaperistlticacomaodecontroleiguala(a)23%;(b)23,5%;(c)24%.
...........................................................86FIGURA16
RespostadoPIDsemconsiderarosefeitosdabombaperistlticaedosensorcomosparmetrosapresentadosnaTabela5,comrefernciadepHvariandode7,3a9,3.........................................................................................................................................................88FIGURA17
RespostadoPIDconsiderandoapenasosefeitosdabombaperistlticacomosparmetrosapresentadosnaTabela5,comrefernciadepHvariandode7,3a9,3..........89FIGURA18
RespostadoPIDconsiderandoapenasosefeitosdosensorcomosparmetrosapresentadosnaTabela5,comrefernciadepHvariandode7,3a9,3...............89FIGURA19
RespostadoPIDconsiderandoosefeitosdabombaperistlticaedosensorcomosparmetrosapresentadosnaTabela5,comrefernciadepHvariandode7,3a9,3.
90FIGURA20
RespostadoPIDconsiderandoosefeitosdabombaperistlticaedosensorcomosparmetrosapresentadosnaTabela6,comrefernciadepHvariandode7,3a9,3.
91FIGURA21
RespostadoGMVsemconsiderarosefeitosdabombaperistlticaedosensore=2x104.(a)RespostaaodegraudepHvariandode7,3a9,3.(b)PerfildosParmetrosEstimados.
.....................................................................................................................93FIGURA22
RespostadoGMVsemconsiderarosefeitosdabombaperistlticaedosensore=2x104,retirandoseovalordoparmetroddaformulaodocontrolador.
......93FIGURA23
RespostadoGMVconsiderandoapenasosefeitosdabombaperistlticae=2x104.(a)RespostaaodegraudepHvariandode7,3a9,3.(b)PerfildosParmetrosEstimados...........
................................................................................................................................94
-
12
FIGURA24
RespostadoGMVconsiderandoapenasosefeitosdosensore=2x104.(a)RespostaaodegraudepHvariandode7,3a9,3.(b)PerfildosParmetrosEstimados.
.......96FIGURA25
RespostadoGMVconsiderandoosefeitosdabombaperistlticaedosensore=2x104.(a)RespostaaodegraudepHvariandode7,3a9,3.(b)PerfildosParmetrosEstimados........
.................................................................................................................................
..96FIGURA26
RespostadoGPCsemconsiderarosefeitosdabombaperistlticaedosensore=2x104.(a)RespostaaodegraudepHvariandode7,3a9,3.(b)PerfildosParmetrosEstimados........
...................................................................................................................................98FIGURA27
RespostadoGPCconsiderandoapenasosefeitosdabombaperistlticae=2x104.(a)RespostaaodegraudepHvariandode7,3a9,3.(b)PerfildosParmetrosEstimados...........
................................................................................................................................98FIGURA28
RespostadoGPCconsiderandoapenasosefeitosdosensore=2x104.(a)RespostaaodegraudepHvariandode7,3a9,3.(b)PerfildosParmetrosEstimados.
.......99FIGURA29
RespostadoGPCconsiderandoosefeitosdabombaperistlticaedosensore=2x104.(a)RespostaaodegraudepHvariandode7,3a9,3.(b)PerfildosParmetrosEstimados...........
..............................................................................................................................100FIGURA30
RespostadoGPCsemconsiderarosefeitosdabombaperistlticaedosensorparaNU=1e=0,2.(a)RespostaaodegraudepHvariandode7,3a9,3.(b)PerfildosParmetrosEstimados.
...................................................................................................................101FIGURA31
RespostadoGPCsemconsiderarosefeitosdabombaperistlticaedosensorparaNU=2e=0,2.(a)RespostaaodegraudepHvariandode7,3a9,3.(b)PerfildosParmetrosEstimados.
...................................................................................................................101FIGURA32
RespostadoGPCsemconsiderarosefeitosdabombaperistlticaedosensorparaNU=3e=0,2.(a)RespostaaodegraudepHvariandode7,3a9,3.(b)PerfildosParmetrosEstimados.
...................................................................................................................102FIGURA33
RespostadocontroladorPIDaplicadoplantapiloto.
...................................103FIGURA34
RespostadocontroladorPIDaplicadoplantapilotoconsiderandoseavarivelY(diferenadeconcentrao).
.......................................................................................104FIGURA35
IlustraodanolinearidadedosensordepH................................................105FIGURA36
RespostadocontroladorGMVaplicadoplantapiloto.
................................107FIGURA37
Perfildosparmetrosestimadosnoprocessoreal.(a)Geral.(b)Comampliao...........
..............................................................................................................................107FIGURA38
RespostadocontroladorGMVaplicadoplantapilotoconsiderandoseavarivelY(diferenadeconcentrao).
.......................................................................................108FIGURA39
RespostaComplementardoprocesso,comampliao.
................................ 109
-
13
Lista de Tabelas TABELA1
EscolhadoPontodeOperaodoProcesso........................................................65TABELA2
DeterminaodoTamanhodeumaRajada
........................................................70TABELA3
VelocidadedasRajadasemFunodaAodeControle
................................71TABELA4
VazoMdiadecidoemFunodaAodeControle..................................73TABELA5
ParmetrosdoControladorPID
...........................................................................81TABELA6
ParmetrosdoControladorPIDapsresintonia..............................................90
-
14
Lista de Smbolos
PVvariveldeprocesso.MVvarivelmanipulada.PIDcontroladorproporcionalintegralderivativo.ARMAXautoregressivemovingaveragewithexogenousinput.ARIMAXautoregressiveincrementalmovingaveragewithexogenousinput.GMVControladordeVarinciaMnimaGeneralizado.GPCControladorPreditivoGeneralizado.Nhorizontedepredio.NUhorizontedecontrole.pesonosinaldecontrole.zvariveldiscreta.YdiferenadeconcentraoentreosonsH+eOH.Vvolumedotanquedemistura.Fvazodesoluo(l/s).Cconcentraodasoluo(mol/l).constantedetempo.referncia.[H+]concentraodoonH+.[OH]concentraodoonOH.relaodefiltragemparaofiltrodemdiamvel.Tsperododeamostragem.a1a,b0a,dparmetrosdoprocesso.
Lista de Subscritos acido.bbase.kinstantedeamostragem.
-
15
1. Introduo
1.1. Motivao do Projeto
Malhas de controle de pH so usualmente encontradas no mbito
industrial
[Gustaffson e Waller, 1992], bem presentes em processos qumicos,
biolgicos,
farmacuticos,ena
indstriaalimentcia.Comoalgunsexemplosmaisespecficos,podem
sercitadasasestaesdetratamentodeesgoto.KravariseWright(1991)afirmamquepara
se retirarmetaispesadosde fluxos contaminadosdemodo a evitar a
poluiodomeio
ambiente, omtodomais empregado consiste no controle do pH,de tal
forma que seja
minimizadaasolubilidadedosmetais.Tambmque,emprocessosbiolgicos,ocontrolede
pHpodeserutilizadoparapossibilitarocrescimentodeclulas.Aindahojeexistemvrios
estudos na rea demodelagem e de estratgias avanadas de controle
voltadas para os
processosdecontroledepH.
OpH normalmente
controladopormeiodeumprocessodeneutralizao.Um
tpicoprocessoindustrialmostradonaFigura1.Basicamente,quandoumcidoreagecom
umabasecaracterizadaumareaodeneutralizao,representadapor
2H OH H O+ + ,(1.1)
ondeH+ o hidrognio inico, eOH representa o on hidrxil.O pH, ou
potencial de
hidrognioinico,podesercalculadoatravsdaexpresso
log[ ]pH H += ,(1.2)
-
16
FIGURA 1 - Processo Industrial Tpico de Controle de pH FONTE:
[Kravaris e Wright, 1991]
naqual[H+]representaaconcentrao,emmol/l,dosonsdehidrognionasoluo.Agua
temacaractersticadeterovalordepHconsideradoneutro,iguala7.Porexemplo,seem
um meio alcalino ou seja, caracterizado por uma maior presena do
on hidroxila,
portanto ummeio bsico for adicionado um cido, o seu pH ir
diminuir, visto que
aconteceroreaesdeneutralizaoentreosdoisonsqueaumentaroaconcentraode
onshidrognioediminuiroadeonshidroxila.Taisreaessocomprovadastendoem
vista que a constante de equilbrio da gua vale 1014, que igual
ao produto das
concentraesdecidoebase [Yln,2001]. Isso
significaque,emgua,oprodutodestas
concentraessersempreiguala1014.Assim,paraqueaconstantenosejaalterada,aoser
adicionado um concentrado cido, uma parte dos ons de
caracterstica bsica deve ser
consumida na neutralizao. Podese perceber que a concentrao de
ons hidrognio
realmente pode ser aumentada aps uma adio desse tipo devido ao
fato de a reao
mostrada em (1.1) ser bidirecional, evidenciando que nem todos
os ons H+ seriam
consumidosnareao.ValorestpicosdepHgiramentre0e14,paraconcentraesdeH+
entre1e1014mol/l.
-
17
Oprocesso ilustradonaFigura1consistedeum
tanquedemistura,noqualopH
devesercontrolado.AvazoFcorrespondeaoconcentradoasertratadopormeiodavazo
u,denominadavazodetitulao.Porexemplo,avazoFpodeserumconcentradobsico,
pormdevesertornadoneutroparapoderprosseguirnoprocesso.Esseconcentradopode
serneutralizadopormeiodeumasoluocida,quecorresponderiavazou.Tendoem
vistaamedidadopHno tanque,um
controladordeterminariaaaberturadavlvulade
controledavazouparatentlomanteremumacertareferncia.Otanqueagitadopara
garantirrelativahomogeneidadenotanquedemistura,tornando,dessaforma,amedidade
pHrealizadapelosensoremumpontomaisrepresentativadopHmdiodotanque.
primeiravista,pareceumproblemadecontrolecomum.Entretanto,agrandeno
linearidade do processo provoca dificuldades para qualquer
sistema de controle. O
processopossuiganhosquepodemvariaremalgumasordensdegrandeza,dependendo
dopontodeoperao.SegundoGustaffsoneWaller(1992),substnciastampopodemser
adicionadas no tanque para diminuir as nolinearidades. Dessa
forma, estratgias de
controlelinearpodemsermelhorempregadas.
Entretanto, nem todo processo industrial utiliza esse artifcio,
e a simples adio
dessas substncias pode no resolver completamente o problema.
Logo, estratgias de
controle que consideram esta grande nolinearidade devem ser
desenvolvidas. Como
exemplo,aFigura2mostraacurvadetitulaodeumprocessodeneutralizaodeuma
baseforteapartirdeumcidoforte.Ummeiomaiscidoquantomenorforseuvalorde
pH,emaisbsicoquantomaiorforseuvalordepH,sendoambososvaloresemrelaoao
pHneutro.Pormeiodessacurva,podeseperceberqueoganhodoprocessonaregiode
pHiguala7muitomaiordoqueaqueleparavaloresdepHmaioresdoque11emenores
doque3.Essacurva foideterminada teoricamenteporRocha
(2006)paraaplantapiloto
utilizadaparaesteprojeto.Vale
lembrarqueacurvadetitulaonormalmenteexpressa
pela abertura da vlvula de controle x pH,mas que, segundo Rocha
(2006), para um
processocidofortebaseforte,oeixodasabscissaspodeserexpressocomoarazoentrevazes
ouvolumesdecidoebase.
-
18
FIGURA 2 - Curva de Titulao de um Processo de Controle de pH
FONTE: [Rocha, 2006]
Da grande nolinearidade, derivase outro problema que tem impacto
sobre os
atuadoresdoprocesso.Para controlaropHnas regies emqueosganhos
somenores,
visando conseguir promover uma alterao significativa do seu
valor, o atuador deve
proverumaumentorelativamentegrandedavazodetitulaovazodecidooubasea
sermanipuladapelocontroladorparaocontroledepHparasercapazdealteraropH.
Porexemplo,paramudaropHde7para3,avlvuladeverproverumavazodetitulao
1,5 vezes maior que a vazo de base, aproximadamente,
considerandose a Figura 2.
Entretanto,casoocontrolesedna
regiodepHprximoa7,asalteraesnessavazo
devem ser extremamente pequenas, visto quemnimasmudanas na vazo
de titulao
promoverograndesmudanasnovalordepH.Portanto,oatuadordeveria
terumaalta
resoluo aliada a uma grande faixa de operao, caractersticas
difceis de serem
encontradas em conjunto. Alm desses dois, existe um problema
mais raro de
tamponizaodotanque,queconsistenapossibilidadedequeopHaumentemesmoquea
-
19
concentrao de base aumente ou diminua, dependendo da concentrao
de espcies
tampopresentesnomeio[McAvoyetal.,1971].
Para resolver essesproblemas, inmeras estratgiasvm sendo
adotadas.Noque
tange modelagem do processo,modelos vm sendo desenvolvidos para
possibilitar o
controledepHpormeiodeoutrasvariveisdeprocesso,que tm relao
comopHdo
mesmo [Naranayan et al., 1997].Autilizaodestas variveispermite
transformar opH
paravaloresmais lineares,
fazendocomqueocontroledoprocessosejamais fcildeser
projetado. Dentre elas, citada a diferena entre as concentraes
de H+ e OH. A
concentrao dessas espcies varia linearmente com a vazo de
titulao, e pode ser
diretamenterelacionadacomopHatravsdeumaexpressomatemtica,desenvolvidano
ApndiceIRelaodeTransformaoentrepHeY.Sendoassim,opHmedidopodeser
convertido para essa nova varivel, e o controle pode ser
realizado pormeio de seus
valores.OutrasvariveiscitadasporNaranayanecompanheiros(1997)soaconcentrao
deonsdehidrognioeoequivalentedecidoforte,descritocomdetalhesem[Kravarise
Wright,1991].SegundoLohecompanheiros(1995),
jforampropostasmodelagenscaixa
pretaparaprocessosdecontroledepHparecidoscomodestaplantapilotopormeiode
redesneurais,queapresentamdificuldadesdeaproximaodevidoescolhadosvalores
passados de entrada e de sada a serem utilizados. Esse autor
ainda desenvolve uma
propostahbrida,comredesneuraisbaseadasemummodelofsicodoprocesso.
J com relao s estratgias de controle avanado aplicadas no
controle deste
processo, Rocha (2006) cita tcnicas de controle avanado, como
controle adaptativo,
multivarivel,preditivobaseado emmodelo, fuzzy, robusto,baseado
em redesneurais e
timo.EstastcnicassocandidatasevmsendoutilizadasnocontroledepH.Naranayane
companheiros(1997)citamqueestratgiasdecontroleviaIMCadaptativonolinearforam
aplicadas alguns processos, considerando essas variveis
alternativas. Tcnicas de
controle por redes neurais adaptativas com modelo de referncia,
conhecida como
MRANNC(ModelReferenceAdaptiveNeuralNetControl)foramusadasem[Lohetal.,1995].
Almdisso,Tadeoe colaboradores (2000) citamque controladores
linearesadaptativose
-
20
baseadosemmodelotambmvmsendoutilizados,eoptampelodesenvolvimentodeum
controle robustopara esse tipode sistema. J foram empregadas
tambm estratgiasde
controle preditivo baseado emmodelo,MPC, como em [Gomez et al.,
2004].Os autores
comparamodesempenhodeum controledesse tipobaseadoemummodelo
linear com
outrobaseado
emummodelodeWienerdoprocesso,obtidopeloprprioautor.Porm,
seusresultadossocomparadosapenasviasimulaoenosoestendidosumprocesso
real.
Pormeiodestespargrafosiniciais,consegueseteravisogeraldequeoproblema
vemsendobastanteestudado,equeaindanosechegouaumconsensosobreamelhor
estratgiaaseradotada.Todasasnovasestratgiasdecontrolepropostasvmsolucionar
problemasdasestratgiasanteriores,mastambmapresentamlimitaes.Aintenodesse
projeto utilizar estratgias de controle avanado na planta piloto
do Laboratrio de
ControledeProcessosIndustriais,quejseencontraautomatizada,comoobjetivodeobter
umcontrolesatisfatriodopHemvrias
faixasdeoperao.Essaplantaserdescritano
Captulo2.
1.2. Escopo do Trabalho
PelarazodeexistiremtantosproblemasnocontroledepH,estetrabalhotemcomo
principal objetivo desenvolver estratgias de controle avanado
plausveis de serem
aplicadasplantapilotodecontroledepH,descritanoCaptulo2,paratentarresolverum
problemaparecidocomaquelesdescritosnoitemanterior.
Alguns problemas que podem ocorrer no controle de pH nesta
planta so
apresentados, juntamente com formasdeminimizlos.Porm, nem todos
osproblemas
podemserresolvidosdiretamente,porestarem
foradasatribuiesdeumengenheirode
controle e automao. Por exemplo, recomendado por Shinskey eGerry
(2002) que o
tanquedemisturatenhaasmesmasmedidasdelargura,comprimentoealtura.Ocontrole
deumprocesso com esta caractersticadeve ser feitodamelhor
formapossvel,mesmo
-
21
sabendosequeesta limitaoprejudica tal controle.Ou seja,a funodo
engenheirode
controlenoresolverproblemasdeprojetodoprocesso,massimcontrolaroprocessoda
formacomoelelheapresentado.
Amodelagemdoprocesso tambmrealizada.Estudos
jforamrealizadosparaa
obteno desse modelo, mas ainda restam algumas lacunas. Dentre
elas, destacase a
desconsideraodosefeitosdabombaperistltica,atuantenocontroledavazodeentrada
de cidonoprocesso.Essa bomba tem a caractersticade emitir
rajadasdo concentrado
cidoemquesto,comumperododependentedaaodecontroleaplicada.Oefeitodessa
rajadapodedesviarmuitoopHdoseuvalorinicial,principalmenteseaPVestivernafaixa
de pH prxima a 7.Mesmo que esse efeito ainda no tenha sido
descrito em trabalhos
anteriores relativos a esteprocesso, conclusesde grande valia j
foram obtidasno que
tangemodelagemdeoutroselementosdoprocesso,sendoapenas
reapresentadasneste
texto.
Apartirdamodelagemdoprocesso,umsimulador
foidesenvolvido,pormeiodo
software MatLab. Esse simulador capaz de representar
razoavelmente bem o
comportamentodoprocesso,possibilitandoumaplataformade
testespreliminaresparao
projetista,queproporcionaeconomiade
tempoeestudoderesultadosantesdaaplicao
doscontroladoresdesenvolvidosdiretamentenoprocessoreal.
As estratgiasde controleescolhidas foramdesenvolvidas em
linguagemMatLab,
para testes de simulao. Escolheuse implementar dois
controladores adaptativos,
conhecidoscomoGMV(GeneralizedMinimumVariancecontroladordevarinciamnima)e
GPC (Generalized Predictive Control controlador preditivo
generalizado). Aps obtido
sucesso nesses testes, as estratgias foram implementadas
emDelphi, em um programa
responsvelporrealizarainterfaceentreoCLPeoPC,desenvolvidoporRocha(2006).O
CLP,nessecontrole,serveapenascomo
interfaceentreoPCeoprocesso,epara realizar
intertravamentos.AlimitaodeseprojetartaiscontroladoresdiretamentenoCLPvemdo
fato de ele s realizar aritmtica de ponto fixo, o que torna o
custobenefcio de uma
implementao externamuito maior. A ao de controle calculada
diretamente pelo
-
22
algoritmo implementado no PC. Com essa estrutura em pleno
funcionamento, so
realizados testes reais na planta paramedir o desempenho das
estratgias de controle
implementadas.
Aps os testes reais, so realizadas comparaes entre o desempenho
real e o
simulado. Alm disso, os pontos fortes e fracos de cada estratgia
implementada so
explicitados, sendo inclusive apresentadas algumas dificuldades
na implementao das
estratgiasescolhidas.
1.3. Organizao do Texto
O texto est dividido em sete captulos. O Captulo 2 apresenta uma
descrio
detalhada da planta piloto, contendo informaes sobre sua
localizao, estrutura,
atuadores, objetivos de controle e comunicao entre o processo e
o controlador. Os
componentes bsicos da planta so especificados, bem como seu
princpio de
funcionamento.
Ametodologiado trabalho descritanoCaptulo 3.Nele, incluemse
tcnicasde
modelagem para os componentes do processo, e consideraes feitas.
A influncia da
agitao no desempenho do processo mostrada, teoricamente. A
teoria bsica de
implementaodas estratgiasde controle avanado escolhidaspara
serem aplicadas ao
processotambmapresentada,bemcomoaimplementaodeumcontroladorPID.
OCaptulo 4mostra amodelagem desenvolvida para o processo.
Incluimodelos
obtidos para o controle de nvel, do pH do tanque de mistura, e
para os sensores e
atuadoresdoprocesso.Almdisso,apresentaosefeitosdaagitaonomodelodoprocesso.
NoCaptulo5apresentadoosimuladordoprocessoparaocontroledepH.Alm
disso, este captulo detalha as implementaes das estratgias
escolhidas, incluindo o
mtodo de estimao online dos parmetros, do qual dependem os
controladores
adaptativosqueforamimplementados.
OCaptulo6apresentaosresultadosdassimulaesetestesreaisparaocontrolede
pHutilizando as estratgiasde controle implementadas.Comparaes so
feitas entreo
-
23
desempenho das estratgias, tendo em vista seus pontos fortes e
fracos no controle do
processoreal,bemcomoentreodesempenhorealeosimulado,parademonstraronvelde
qualidadedosimulador.OstestesreaissorealizadoscomoscontroladoresPIDeGMV,e
seusresultadostambmsocomparados.
A concluso do presente trabalho, desenvolvida no Captulo 7, faz
alguns
comentriosfinaisedefinenovasdireesnasquaispoderosebasearfuturostrabalhosna
plantapiloto.
-
24
2. Descrio da Planta
A planta piloto utilizada neste projeto localizase no Laboratrio
deControle de
Processos Industriais, LCPI, doDepartamento de Engenharia
Eletrnica, no campus da
UFMG.Nestecaptulodescritoocomportamentodaplanta,bemcomoseuscomponentes.
Outradescriodamesmapodeserencontradaem[Rocha,2006].Aplantatemoobjetivo
desimularumprocessodecontroledepH,noqualumfluxodeconcentradobsicodeve
serneutralizadoporumavazode concentradocido, controladaporuma
estratgiade
controlequalquer.
Uma ilustrao da planta real mostrada na Figura 3.A planta
consiste de trs
tanques,sendodoistanquesdearmazenamentoeumdemistura.Otanquedemistura,da
marcaNalgon,cilndrico,suportatemperaturasat135C,temcapacidadede5lepossui
uma escala demedida de volume, que vai desde 500 a 4500ml, sendo
perfeitamente
indicadopara resistir s
condiesoperacionaisdoprocesso.Osoutrosdois tanques,da
marca Permution,modelo Barrilete, de dimenses iguais a 42 cm de
altura e 16,5 cm de
dimetro, tambm so cilndricos, so construdos em epxi [Permution,
2005], tm
capacidadede20l,possibilitamvisualizaoexternadonvelcomescalaemvolumeetm
utilidadequandodoarmazenamentodas soluesbsicaecida,enviadasao
tanquede
mistura. No tanque de mistura, a agitao realizada por meio de um
agitador
eletromagntico, marca Fisatom, modelo 753, de 50W de potncia e
alimentao 115V.
Maiores detalhes podem ser encontrados em [Fisatom, 2005]. O
nvel de agitao
controladomanualmente, por um potencimetro, cuja escala varia de
0 a 8. O tanque
responsvelporreterasoluobsicaconectadoao
tanquedemisturadiretamentepor
umamangueira.Avazodebaseregulada,semnenhumaformadecontrole,pormeioda
aberturadeumatorneira,localizadanasadadotanque.
-
25
FIGURA 3 - Ilustrativo da Planta Piloto de Controle de pH FONTE:
[Rocha, 2006]
Jotanquecontendoasoluocidasecomunicacomodemisturaatravsdeuma
bomba peristltica, marca Omega, modelo PHP53, tipo T, com 100VA
de potncia e
alimentaode115V,ecomandoeltricodecorrentede4a20mA.Abombatambmpode
sercontroladamanualmentepormeiodeumpotencimetro,opoescolhidapormeiode
umachaveseletora.Essabombafoiescolhidaparatransportarasoluocidaentreosdois
tanques por ser resistente corroso provocada pelo cido. Outras
vantagens e
desvantagensdessetipodebombapodemserencontradosem[Rocha,2006].Umasegunda
bomba, idntica descrita, responsvel por regular a vazo de sada
do tanque de
mistura.Informaestcnicassobreasbombaspodemserencontradasem[Omega,1996].
As duas bombas formam, portanto, o conjunto de atuadores do
processo e a sua
configuraopossibilita:
-
26
1. o controledopHno tanquedemisturapormeiodaprimeirabomba,
cuja
aodecontroleregulaaquantidadedeconcentradocido,atravsdavazo
da soluocida,necessriaparaneutralizaravazodebasequeentrano
tanquedemistura;
2.
ocontroledenveldomesmotanque,condioindispensvelparaocontrole
depH,explicadanoCaptulo4,devidopresenadasegundabomba.
ParamediodopHno
tanquedemistura,osensordepH,marcaOmega,modelo
PHB72[Omega,1988]foiadotado.Temumafaixadeoperaode0a14pH,resoluode
0,001 pH e acurcia de 0,005 pH.A tenso de sada domesmo vai de 0
a 700mV,correspondendo faixade0a14pH [Omega,1988].Aindapossuium
transdutordigital,
sendoumvisordeLEDsde4dgitos,ecompensaoautomticadetemperatura,visto
queamedidadepHmuito influenciadaporesse fator.Neste trabalho,a
compensao
automtica de temperatura no foi utilizada por encontrarse com
defeito. O eletrodo,
responsvelpelamedidadepH,construdocomumasoluo3,5MdeKClecomcorpo
devidro.Essa soluouma refernciaparaqueo sensor consigaproduzirum
sinalde
tensoquesejaproporcionalaopHdasoluomedida.Informaessobreofuncionamento
desensoresdepHpodemserobtidasem[McMillan,1994].OsensordepHposicionado
em um lugar relativamente alto no tanque demistura, por
intermdio de um suporte,
devidoarestriesdesecolocarosensormaisfundonotanque.SegundoShinskeyeGerry
(2002),omais indicadoposicionarosensorprximosadado tanque,oque
tentouse
fazerduranteostestesaosecolocaromesmoemumaposioimediatamentesuperiorada
sadadotanque.
ComooCLPtemumafaixadeentradadesinaisanalgicosde
10V,foinecessriomontarumcircuitoeletrnicoqueamplificasseosinalprovenientedosensordepHantes
que omesmo fosse transmitido ao prprio CLP.O circuito
amplificador constitudo,
basicamente,peloamplificadoroperacionalTL071.DoisdessesCIsforamutilizados.Esse
-
27
circuitodescritocomdetalhesem[Rocha,2006],ondeasvantagensdesteamplificadorso
evidenciadas.
Onveldo tanquedemisturamedido comoauxliodeum
sensorultrassnico,
tambmdamarcaOmega,modeloLV402,com transdutordigitalde4dgitos.A
faixade
operaode15,24a914,4cm,e
forneceumacorrentedesadade4a20mA.Onvel
inferidoapartirdadistnciaentreosensoreasoluodotanque.Essadistnciacalculada
apartirdotempodecorridoparaqueosinalacstico,de30a300KHz,emitidopelosensor
sejarefletidopelasuperfciedasoluoeretorneaoprprio.Portanto,omesmosfunciona
para superfcies refletoras, mas pode servir para medir distncias
diversos tipos de
materiais.OsinaldesadapodeserobtidoatravsdainterfaceRS232presentenosensor.
Maioresdetalhessoapresentadosem[Rocha,2006]e[Omega,1997].Paraligarosinalde
correntedasadadosensoraoCLPfoinecessriaumaadaptao,cujodiagramaeltrico
descritoem[Rocha,2006].
Paracontrolaroprocesso, fazseousodeumPCeumCLP.OCLPresponsvel
porreceberasmedidasdosensorultrassnicoedepH.Comoamedioadvindadosensor
ultrassnico apenas representante da distncia entre o sensor e o
nvel do tanque de
mistura,amesmadeveser
transformadaparaasuacorrespondentedenvel.Almdessa
funo,oCLP fica
responsvelpelocontroledonveldaplantaeporenviarossinaisde
controle calculados pelos algoritmos de controle, implementados
no CLP e no PC, s
respectivasbombas.Porsermaiselaborado,oalgoritmodecontroledepHimplementado
nocomputador,principalmentedevidoaofatodequeoCLPpodeserprogramadoapenas
emlinguagemladder,oquetornaextremamentedifcilaimplementaodasestratgiasde
controleavanadoescolhidasdiretamentenoprprio.
OCLPescolhidodamarcaKeyence,modeloKV300.umminiCLP,compostopor
ummdulo de alimentao, KVU4, outro de I/O analgicos, modelo KVN6,
e outro
mdulo processador com 10 entradas e 4 sadas digitais. Omdulo de
I/O analgicos
consiste de 4 entradas ( 10V, 5V, 0 a 20mA) e 2 sadas analgicas
( 10V, 5V, 4 a20mA).Ovalorde tensonas entradas/sadas
configuradopelousurio.O softwarede
-
28
programaodoCLP,comojdito,ssuportaalinguagemladder,efoidesenvolvidopara
ser executado em ambiente Windows. O CLP se comunica com o
computador por
intermdio de uma porta RS232. Informaes mais detalhadas sobre o
CLP so
apresentadasem[Keyence,1999].
Ocomputador ligadoaoCLP,eambossecomunicampormeiodeumaplacade
aquisiodedados,comconversoresA/DeD/A,de10bits,responsveisportransferiros
sinaisdossensoresparaocomputadoreossinaisdecontrole,calculadospeloPC,parao
CLP, respectivamente.As funesdoPC soasde colhere
filtrarosdadosdoprocesso,
calcularossinaisdecontroleparamanteropHprximoreferncia,enviartaissinaisao
CLPepossibilitaroarmazenamentodosdadosdetestes,contendoasmediesdenvele
pH,ossinaisdeatuao,eosparmetrosestimados.OPCumAMDAthlon1800+,com
512MBdememriaRAM,esistemaoperacionalWindowsXP.
Oobjetivode controlemanter
tantonvelquantopHomaisprximosquantoo
possvel de suas respectivas referncias. A primeira condio, como
j frisado,
fundamental paraum bom controle de pH, visto que omodelo
linearizado obtido para
controleobtidoconsiderandoseumnvelestvel.Essacondiomostradacomdetalhes
noCaptulo4.
-
29
3. Metodologia
Nessecaptulodescrita,brevemente,ametodologiadeexecuodesseprojeto.Em
primeirolugar,serdiscutidaamodelagemdoprocesso.Grandepartedessetrabalhojfoi
feita em [Rocha, 2006]; entretanto, algumas lacunas ainda devem
ser preenchidas. Ser
citadatambmaformadecontroledenveldotanquedemistura,
jabordadaporRocha
(2006).Aspartesmais
importantesdesteprojeto,correspondendoaodesenvolvimentode
um simulador para o processo e implementao de estratgias de
controle avanado,
seroapresentadasemseguida.Ocaptuloencerradocomalgumasconsideraesfinais.
3.1. Modelagem do Processo
3.1.1. Modelagem do Processo de pH
Porserextremamentecomplexo,esteprocessopossuivriosdetalhesquedevemser
levadosemcontaantesdeseelaborarqualquertipodeestratgiadecontrole.Paraentender
algumasdessaspeculiaridadesdevese,primeiramente,compreenderomodelofsicodetal
sistema.
UmadasgrandesdificuldadesqueacompanhamocontroledepH,eamaisvisvel,
residenagrandenolinearidadedoprocesso.Aprincipaldelasreferentemudanade
ganho em vrias ordens de grandeza, como j mostrado na Figura 2.
Essa mudana
impossibilitaqueumsimplescontrole
linearpossaoperaremvriospontosdeoperao,
controlandodiretamenteavarivelpH.
Esforosjvmsendofeitoscomrelaoessaquesto.Naranayanecompanheiros
(1998)abordamousodevariveisauxiliaresparatornaroganhodoprocessomaislinear.
Nessetrabalho,osautorescitamqueadiferenanaconcentraodeonsH+eOHvariade
formapraticamente
linearparaumprocessocidofortebaseforte,queocasoestudado
-
30
naplantapilotodescritanoCaptulo2,comomostradonoCaptulo4.Rocha(2006)derivao
modelodoprocessopormeiodeumbalanosimplesdemassa,modeloestequedadopor
( ) ( ) ( ) ( ) ( ) ( )a a b bdYV F t C t F t C t F t Y tdt
= ,(3.1)
onde:
Vovolumedotanquedemistura(l);
YadiferenanasconcentraesdosonsH+eOH(mol/l);
Faavazodeentradadecidonotanquedemistura(l/s);
Fbavazodeentradadebasenotanquedemistura(l/s);
Caaconcentraodasoluocidadotanquedecido(mol/l);
Cbaconcentraodasoluobsicadotanquedebase(mol/l);
Favazodesadadotanquedemistura(l/s).
A escolhadavarivelYparaamodelagem e controledoprocesso
sedeudevido fcil
transformao entre o pH e seu valor. Tal relao de transformao
encontrada no
ApndiceI.
Paraencontrarafunodetransfernciacorrespondenteparaesseprocesso,setorna
necessriaalinearizaoemtornodeumpontodeoperao.Oobjetivoobterummodelo
emfunodavazodeentradadasoluocida,queserusadanocontroledopH.Rocha
(2006) apresenta tambm essemodelo, lembrando que as variveis
assinaladas com ()
determinamopontodeoperaodaplanta.Afunodetransferncia,ento,
' ( ' ')( )( )( ) 1
a a bpHa
a
C F FY sG sF s s
+= = + ,(3.2)
-
31
queummodelodeprimeiraordem, sem tempomortodevidoao fatodea
reaode
neutralizaoserextremamente rpida,cujo tempode
reaopodeserdesconsiderado,
comconstantedetempoiguala
'' 'a b
VF F
= + .(3.3)
Damesmaforma,podeseobteromodeloquerelacionaadiferenadeconcentrao
comavazodebase
' ( ' ')( )( )( ) 1
b a bpHb
b
C F FY sG sF s s
+= = + .(3.4)
Poressesmodelos,percebeseque,paraaproximaroprocessodeumsistemalinear,
ovolumedo tanquedemisturadeve ser constante,bem
comoasvazesdeentradadas
soluescidaebsica,almdaconcentraodeonsH+eOHnassoluescidaebsica.
Paramanterovolumeconstanteumcontroladordenvelincorporadoaosistema,oqual
deve terumbomdesempenhoparapermitirqueomodelo linearizado
representebemo
processo.Vale
lembrarqueavazodebasereguladapormeiodeumsimplesregistro;
esta varivel ser considerada como perturbao constante para os
controladores
projetados.Rocha(2006)comentaqueaderivaodessemodelosupehomogeneidadeno
tanquedemistura,oqueumaaproximaovlidadadasasdimensesdo
tanqueeas
pequenasvazesdeentrada.Valeaindaobservarque,paralinearizaodomodelo,avazo
de concentrado cido deveria permanecer constante, o que no
acontecer no processo,
vistoqueabombaquereceberaaodecontrolecalculadapelocontroladorresponsvel
poressavazo.Ovalorutilizadonessalinearizaoserescolhidocombaseemumamdia
obtidanasimulaoparaocontroledopHprximoaovalorneutro,7.
-
32
Porltimo,restaobteromodelodiscretizadodoprocesso.Essemodeloimportante
quandodoprojetodosimuladorparaoprocesso.Paraobtlo,bastadiscretizarasfunes
detransfernciacontnuasdadaspor(3.2)e(3.4).Natransformaoparaomodelodiscreto
jseconsideraapresenadeumextrapoladordeordemzero,cujafunomanterovalor
da varivel manipulada constante entre os instantes de
amostragem. A funo de
transfernciadiscretaparaomodelodiferenadeconcentraovazodecidoequivalea
111
1 1
( )( )( ) 1
dapHa
a
K zY zG zF z z
= = ,(3.5a)' (1 )
' 'a
daa b
CKF F
= + ,(3.5b)
ondeST
e = , eTS corresponde ao tempode amostragem escolhido.Damesma
forma,paraomodelodiferenadeconcentraovazodebase:
111
1 1
( )( )( ) 1
dbpHb
b
K zY zG zF z z
= = ,(3.5c)' (1 )
' 'b
dba b
CKF F
= + .(3.5d)
Aescolhadotempodeamostragemdeveconsiderardiversosfatores.Rocha(2006)
recomendasequeomesmosemantenhaentreoslimites
15 10sT < < .(3.6)
-
33
Esses limites evitam o falseamento (aliasing) do sinal no caso,
a varivel de
processo.Maioresdetalhessobreosefeitosdotempodeamostragemsoapresentadosem
[Rocha,2006].AescolhadoperododeamostragemserapresentadanoCaptulo4,eno
Captulo6apresentaseumajustificativadessevalorbaseadaemtestesreais.
3.1.2. Modelagem do Processo de Nvel
Omodelodenveltambmpodeserdeduzidodeumbalanodemassasdosistema
[Rocha, 2006]. Este balano indica que a variao demassa no
sistema igual vazo
mssicadeentradamenosavazomssicadesada.Dessaforma,temosque:
s b a a b b s sdhA F F Fdt
= + ,(3.7)onde:
Sadensidadedasoluodotanquedemistura(kg/l);
Abareadabasedotanquedemistura(m2);
aebsoasdensidadesdassoluescidaebsica,respectivamente(kg/l);
FaeFbsoasvazesvolumtricasdeentradadasoluocidaebsicanotanquedemistura,respectivamente(l/s);
Fsavazodesadadotanquedemistura(l/s);Apartirdessasequaes,Rocha(2006)obtmafunodetransfernciadoprocesso
comosendo
3 3 3a b
s s
10 10 10( ) ( ) ( ) ( )a b sb b b
H s F s F s F sA s A s A s
= + .(3.8)
A constante103encontrasepresenteapenaspara
transformarasunidadesde litrospara
metroscbicos.
-
34
3.1.3. Variao da Vazo de Base em Relao Altura do Tanque
Umadificuldadeadicionalparao controledopH se refere alturado
tanquede
base.DeacordocomAlvarengaeMximo(1999),apressonointeriordolquidovariade
acordocomaalturadomesmonoreservatrio,atravsdarelao
ap p gh= + ,(3.9)
ondepapressonointeriordotanqueemumpontoqualquer,paapressoatmosfrica,
adensidadedolquido,gaaceleraodagravidadeehalturadolquidoemrelao
aopontoaoqualsequerdeterminarp.Essapressoimportantenadeterminaodavazo
desadado
tanquedebase,vistoquealtimanocontrolada,eproporcionadaapenas
porumaaberturadeumavlvula(torneira).Dessaforma,casoapressoaumente,avazo
desadaaumentar.
Nostestesrealizados,onveldotanquedebasefoimantidoconstantemanualmente,
poisnoexiste,noprocesso,umsensorparamedironveldotanquedebaseeumatuador
paracontrolaraaberturadavlvuladesada.Anecessidadedemanterestenvelconstante
vemdaprpriaderivaodas funesde
transfernciadoprocesso,vistoqueavazode
basedevepermanecer constantepara que omodelo
fsicodoprocessodepHpossa ser
linearizadoemtornodeumpontodeoperao.
3.1.4. Sensor de pH
O objetivo dessa etapa verificar a dinmica correspondente ao
sensor de pH.
Dependendodarelaoentreaconstantedetempodoprocessoeaconstantedetempoda
respostadosensor,estepodeinfluirnadinmicapercebidapelocontroleealteraromodelo
doprocesso.
O sensor de pH possui diversas particularidades. Com o tempo,
materiais se
depositamnamembranadomesmo, responsvelpor gerar
adiferenadepotencialque
-
35
dependedopHdoprocesso,ealteramasuamedio,comimpactosgravesnocontroledo
processo [Brandes, 2005].Outro agravante que o sensor deve estar
permanentemente
calibrado (sendo que sua descalibrao ocorre com bastante
freqncia). Segundo
informaesobtidasemumlaboratrioquerealizamediesfrequentes,paraseconseguir
medidas precisas se tornam necessrias calibraes dirias [Resende,
2007]. Entretanto,
processos industriais fazem calibraes com menor freqncia.
Recomendase fazer a
limpezadosensorperiodicamente[Brandes,2005],eestarepresentaumaboaoportunidade
parafazeracalibrao.Almdisso,olquidoderefernciadoeletrododemediodeveser
trocadoconstantemente.TaisfatoresmostramqueosensordepHrequermuitocuidado,e
aqui so mostradas apenas algumas caractersticas peculiares, para
que o leitor se
familiarizecomoproblema.
Rocha (2006) j apresenta omodelo do peagmetro, ou sensor de pH,
da planta
piloto desse projeto. Para tanto, o autor utilizouse domtodo da
resposta ao degrau,
explicitado em seu prprio trabalho.Omodelo derivado corresponde
ummodelo de
primeiraordem,daforma
11pHmetro
Gs= + ,(3.10)
cujaconstantedetempomostradanoCaptulo4.
3.1.5. Bombas Peristlticas
Comojditoanteriormente,asbombasperistlticastmumefeitopreponderanteno
comportamento do processo. Como esse efeito alteramuito a
variabilidade da varivel
controlada, pH, principalmente em regies de elevado ganho,
decidiuse modellas
conformedescritoaseguir.
Para se entender o problema, em princpio, basta considerar o
fato de que uma
bombaperistltica emite rajadasdoproduto a ser bombeado.Essas
rajadas tmvolume
-
36
fixo, cujo valor depende da construo da bomba. O sinal de
controle, manual ou
automtico,quedeterminaaaodabomba,regulaonmeroderajadasporintervalode
tempo que a bomba emite. Considerando que, em um determinado
tanque, se queira
controlaroprocessoparaqueopHsemantenhaem7,porexemplo,equeaadiode6ml
decidofaacomqueopHcaiaparaumvalorprximode4,secadarajadaemitidapela
bombaperistlticaforde6ml,umagrandevariaonaPVserobservada.Esseproblema
ocorrenaplantapilotodesseprojeto,enopodeserresolvido,apenasminimizado.Porse
tratardeumsistemacidofortebaseforte,abombaperistlticaacabaporpromoveruma
variabilidadegrandenocontroledopHemtornodarefernciadesejada,principalmentena
regiodepHprximaa7,comomostradomaisadiantenestetrabalho.
Dessaforma,paraseprojetarumbomsimulador,tornasenecessrioconsideraros
efeitosde talbomba.Provitec (2006)explicaoprincpio fsicodo
funcionamentodeuma
bombaperistltica.Elaconstitudade:
1.
Cabeoteemformadeferradura,paraguiaramangueiradocartuchohidrulico;
2.
Oprpriocartuchohidrulico,queamangueiranaqualcorreoprodutoaserdosado;
3.
Osroletes,montadosnobraoportarolete,quepressionamamangueiradocartuchohidrulicocontrao
cabeote;
4. Oeixocentraldabomba,quegiraobraoportarolete;
5. Conexoparamangueiradeaspiraodabombona(entradadabomba);
6. Conexoparamangueiradeinjeo(sadadabomba);
7.
Motoreltrico,engrenagensdereduo,eletrnicadecontrolecomregulagem,leds,etc.
AFigura4mostraumafoto(diagrama)ilustrandoaconstruodabomba.Osroletes
so comandados pela ao de controle aplicada bomba.Ao girarem
(sentido horrio),
formase um vcuo namangueira de aspirao da bombona, que puxa o
produto para
dentropeloladoesquerdodabomba.Aocontinuargirando,oroletenoladodireitoliberaa
passagemdoprodutoque entroupuxadopelovcuonamangueira,oque
caracteriza a
emissodeumarajada.
-
37
FIGURA 4 - Componentes de uma Bomba Peristltica FONTE:
http://www.provitec.com.br/produtos/peristaltica.html, 2006
Paramodelar os efeitos destemovimento da bomba, necessrio
primeiramente
saberovolumedeumarajada.Paratanto,foirealizadoumprocedimentodecalibraoem
que, durante um intervalo de tempo suficientemente grande
deixouse a bomba em
funcionamento, emitindo as rajadas e acumulando o fluido
bombeado em um tanque.
Contouseonmeroderajadasemitidas,eapartirdovolumefinalnotanque,determinou
seovolumedeumanicarajada,dividindoseovolumefinalpelonmeroderajadas.
Feita a calibrao de rajadas, devese determinar a velocidade de
emisso das
rajadasemfunodosinaldecomandodabomba.Comabombaemmanual,enviaseuma
aodecontroleconhecida(entre4e20mA,correspondentesa0e100%deao).Paraesse
sinal,duranteumintervalodetemposuficientementegrande,contaseonmeroderajadas
emitidas.Dividindoseessevalorpelotempocronometrado,obtmseonmeroderajadas
porsegundoparaaquelaao.Esseprocedimentorepetidoparavriospontosdeformaa
determinaracurvaestticadabomba.
Oterceiroeltimopassoconsisteemtransferiressasinformaesparaasimulao.
Paratanto,umavarivelarmazenaoquantoorolete,mostradonaFigura4,
jgirou.Para
finsdeexplicao,essavarivelser
referidacomoR.Reparequeumgirode180dos
roletescorrespondeemissodeumarajada.Cadaunidadedessavarivelsignificaqueos
-
38
roletes completaram um giro de 180, o que significa que essa
varivel corresponde ao
nmeroderajadasquedevemseremitidas.Paracadainstantedeamostragem,osimulador
l a sada calculadapelo controlador (aode controleda bomba)
e,pormeioda curva
estticada bomba,determina onmerode rajadas a serem lanadas.O
resultadodesse
clculo,somadoaovaloranteriordeR,onmeroderajadasquedevemseremitidasno
instanteatual.
Entretanto, essa varivelpode ser fracionria.Caso isso ocorra, s
aparte inteira
deve ser consideradana simulaodas rajadas,pois a bomba real s
emiteumnmero
inteiroderajadas.OrestantedevepermaneceremR.Porexemplo,seonmero2,5
for
calculado,osimuladordeveemitirumarajadaequivalentea2,eRdevepassaravaler
0,5. Emitir uma rajada equivalente x significa, para fins de
simulao, emitir naquele
instanteumarajadacomvolumexvezesmaiordoqueovolumedeumanicarajada.Essa
abordagemvemdofatodeque,noprocessoreal,podeacontecermaisdeumarajadaentre
duas amostragens, e uma aproximao deste acontecimento na simulao
pode ser
implementadadessamaneira.
Assim,modelasedeformamaisrealsticaosefeitosdabombaperistltica.Somente
abombadeemissodeconcentradocidosermodelada.Paraocontroledenvel,esses
efeitospodemsernegligenciados.AmodelagemdabombaapresentadanoCaptulo4.
3.1.6. Efeitos do Agitador
Oprojetodeumagitadorparaumdadoprocessorequermaiscuidadosdoquese
pode imaginar. Pesquisadores da rea definem um termo, chamado
tempo demistura
(mixingtime),queserefereaotemponecessrioparaqueamisturaatinjaumcertograude
homogeneidade [Delaplace et al,2000].Essesautoresainda citamque,
juntamente coma
potnciaconsumida,otempodemisturadeterminaaeficinciadosistemadeagitao.
Otempodemisturapodesercalculadoapartirdapotnciadoagitadorque,porsua
vez,dependedasdimensesdotanque,velocidadederotao,formatodoagitador,dentre
outros fatores [Nienow, 1997], [Samaras el al, 2006].Dessa
forma, o tipo de processo j
-
39
determinaosmelhoressistemasdeagitaoaseremutilizados.Umbomdimensionamento
do processo resulta em um tempo de mistura dez vezes menor do
que o tempo de
residncia[Samarasetal,2006],querelacionadoconstantedetempodoprocesso.
Outrodetalhedesse sistema que a agitao nodeve ser to forte
aopontode
provocar vrtices.Vrtices so redemoinhos que podem surgir em
correntes de gua e,
segundoPatterson (2005), reduzem a segregao e aumentam os
gradientes relativosde
concentraoentreregiesdefluidosnohomogeneizados.Emoutraspalavras,apresena
de vrtices indica que o sistema est sendomal homogeneizado,
condio vital para a
modelagemdoprocessodepHutilizadanesseprojeto.
Comrelaoplantapiloto,sabesequeaformadoagitadorfoiescolhidadeforma
inadequadaanteriormente,vistoque,emtanquesdemistura,oagitadordeveprovocarum
fluxotransversal,enoradial[McMillan,1994].Fluxoradialsignificaparaleloaoagitador,
e,nocasodaplantapiloto,aofundodotanque,enquantoofluxotransversalparalelos
paredes do tanque. O formato do agitador atualmente presente na
planta, segundo
McMillan (1994), promove um fluxo predominantemente radial,
inadequado para
promoverahomogeneizaodesejada,oquepodedificultaraindamaisocontroledepH
notanque.Essaescolhafoifeitapeloprojetistadeformaatornaraplantapilotoumobjeto
deestudosmaisinteressante.
Para contornar esses problemas, a idia realizar umamodelagem
emprica dos
efeitosdoagitadornoprocesso.Acreditase,porexperimentaonaprpriaplantapiloto,
que a agitao promove uma variao na velocidade de resposta do
processo. Quanto
maioraagitao,maisrpidaseriaaresposta.Alguns
tanques,semelhantesao tanquede
misturadaplantapiloto,soagitadospormeiodeumavazoderecirculaoaoinvsdo
usodeturbinasouagitadores.Quantomaiorarecirculaodentrodeumtanque,maiora
agitaoqueseucontedosofre.Sendoassim,podeserfeitaumaassociaodiretaentrea
velocidadederotaodeumagitadorcomumavazoderecirculaohipottica,naqual
umaumentonavelocidadede
rotaodoagitadorprovocariaumaumentonavazode
recirculao.
-
40
Reconsiderando a constante de tempo do processo,mostrada em
(3.3), tendo em
vista uma vazo de recirculao, podese estabelecer, baseado em
[Jota, 1998], que a
constantedetempodoprocessoseriaiguala
'' ' 'a b r
VF F F
= + + ,(3.11)
ondeFravazoderecirculao,eml/s.Pormeiodessaequao,podeseperceberqueum
aumento da vazo de recirculao diminuiria a constante de tempo do
processo, i.e.,
aumentariaasuavelocidadederesposta.Esseresultadoodesejado,vistoqueavazode
recirculaohipotticadiretamenteproporcionalaonveldeagitao.
Dessa forma, basta modelar os efeitos do agitador como se a
agitao fosse
promovida por vazo de recirculao. O agitador possui um comando
manual, que
determinaavelocidadedeagitao,porumpotencimetrocujaescalavariade0a8,sendo
que,quantomaiorovalor,maioraagitaopromovida.aceitvelqueestevalorchegue
at3,ondese iniciaa
formaodevrtices.Talvaloroescolhidoparaarealizaodos
testes na planta, por promover a mxima homogeneizao sem formar
vrtices
significativos.
Paraadicionarosefeitosdaagitaoaomodelodoprocesso,foirealizadoumteste
de resposta ao degrau no processo real para o nvel de agitao
adotado na planta,
determinadopelocomandomanualdoagitador.Pormeiodarespostadoprocesso,podese
determinar a constante de tempo utilizandose domtodo da Resposta
Complementar,
apresentadoem[Teixeira,2004].EstesresultadossoapresentadosnoCaptulo4.
A constantede tempo terica calculadapara agitaonula,previstapela
equao
(3.3)comparadacomaobtidaparaonveldeagitaoescolhido.Talvalorsubstitudo
naequao(3.11)e,comosvaloresdavazodecido,vazodebaseevolumedotanque
-
41
que determinam o ponto de operao do processo, calculado o valor
da vazo de
recirculaoequivalente.
3.2. Controle de Nvel
Como descrito no item 3.1.1, o volume do tanque demistura deve
sermantido
constanteparaqueoprocessopossaseraproximadoporumsistemalinear.Paraatingirtal
objetivo,foidesenvolvidoumcontroladordenvelporRocha(2006).
Ocontroladorpossuiapenasaoproporcionaleumdesacopladordemalhas,efoi
implementadodiretamentenoCLP,porserrelativamentesimples.Osensordenvel
tem
respostadinmicamuito rpida,e seumodelopode ser considerado
simplesmente como
sendo um ganho. O controle feito mediante um sinal de comando
para a bomba
peristltica que controla a vazo de sada do tanque demistura.As
outras vazes so
consideradas como variveis de perturbao para o controlador.
Maiores detalhes so
encontradosem[Rocha,2006].
Noescopodesseprojetoestincludoocontroledenvel,indispensvelparaobom
comportamento dos controladores avanados que se pretende
implementar. Portanto,
consideraseonvelcomocontrolado,resultandoemumvolumedotanqueconstante,no
desenvolvimentodosimuladoredastcnicasdecontroleaseguir.Contudo,sabesequeo
controladorproporcionaumerronocontroledonveldotanquequandooscontroladores
variamavazodeentradadecido,fazendocomqueopontodeoperaosejamudadoum
poucodevidovariaodovolume.
3.3. Projeto do Simulador
Oobjetivodosimuladorteracapacidadederepresentaroprocessodecontrolede
pHemumpontodeoperaopreviamenteescolhido,quedependedasconcentraesdas
soluescidaebsica,dasvazesdeentradadassoluescidaebsica,edovolumedo
tanque. O simulador foi construdo usando o software MatLab, por
apresentar fcil
manipulao de matrizes. Essa facilidade se mostra bastante
atraente quando da
-
42
implementaodaestimaodeparmetrosedoGPC,mostradosnoitem3.4.1e3.4.3,por
envolveremdiversasoperaesmatriciais.
A sequncia que o simulador dever seguir mostrada na Figura 5.O
primeiro
passoparaoprojetodo simulador
adefiniodopontodeoperaodoprocesso.Tal
pontodeterminadopelaescolhadovolumedotanque,vazesmdiasdeentradadecido
e base, e valores de pH das solues cida e bsica. A segunda etapa
corresponde
derivao da equao de diferenas que representa o processo no ponto
de operao
escolhido. Tal equao depende, inclusive, do valor escolhido para
o perodo de
amostragem.Porsetratardeumprocessodeprimeiraordem,aequaodediferenastem
aforma
1 0( ) ( 1) ( 1)a a a a ay k a y k b F k= + ,(3.12a)1 0( ) ( 1)
( 1)b b b b by k a y k b F k= + ,e(3.12b)( ) ( ) ( )a by k y k y k=
+ ,(3.12c)
onde y(k) o valor da diferena de concentrao entre os onsH+ eOH
no tanque de
mistura, em mol/l; ya(k) o efeito da vazo do concentrado cido
nessa diferena de
concentraoeyb(k)ocorrespondenteemrelaovazodoconcentradobsico.Fa(k)e
Fb(k)sotaiscomoem(3.1).Osparmetrosdasequaesdediferenas(a1a,a1b,b0a,b0b)so
aqueles que refletem os efeitos das escolhas do ponto de operao
e do perodo de
amostragemparaasimulaonarespostadomodelo,epodemsercalculadospelasfunes
de transferncia discretas, mostradas no conjunto de equaes
(3.5). Tais funes de
transfernciassofacilmenteconvertidasparaasequaesdediferenas(3.12a)e(3.12b).
Oterceiropassocorrespondedeterminaodascondiesiniciaisdoprocesso,que
consistemnosvaloresiniciaisdasvazesdecidoedebaseedadiferenadeconcentrao.
AdiferenadeconcentraopodesermapeadasemdificuldadesparaobterovalordopH
notanquedemistura.
-
43
FIGURA 5 - Fluxograma de Sequncia de Passos de Simulao
A partir dessas informaes, o simulador capaz de fazer o clculo
do valor da
diferenadeconcentraonoprimeiro
instantedeamostragem,pormeiodoconjuntode
equaes(3.12)passo4.Apartirdessevalor,podesetambmderivarovalordopHno
tanque.Aestevaloradicionadoumrudocommdiazero.
Nopasso5aconteceaestimaodeparmetros.Essaestimaodependedevalores
passadosdaentrada,Fa(k),edasada,y(k).Omtododeestimaodeparmetrosescolhido
oMnimosQuadradosRecursivoscomFatordeEsquecimento.Essemtodo
temrpida
1 Definio do Ponto de Operao
2 Obteno dos Parmetros da Equao de Diferenas
3 Determinao das Condies Iniciais
4 Clculo da Resposta do Processo
5 Estimao de Parmetros
6 Clculo da Ao de Controle
7 Clculo da Resposta da Bomba
8 Acabou o Tempo de Simulao?
9 FIM
Sim
No
-
44
convergncia,epossibilitaestimarosparmetrosdoprocessoonlineeparauma
janelade
tempo escolhida [Jota, 2006].O funcionamento dessemtodo mostrado
em 3.4.1, bem
comoaformanaqualserimplementadoparaoprocessodecontroledepH.
Opasso6correspondeaocontrolador
implementado.Comooprojetoabordamais
deumtipodecontrolador,osimuladorpermiteaescolhadequaldelessersimuladopor
meio de uma varivel interna.O clculo da ao de controle depende
dos parmetros
estimados no passo 5. Cada controlador possui estrutura e
objetivos prprios, como
descritono item3.4. Ocontroladorescolhidocalculaaaodecontrole,
limitaseuvalor
entre0e50%eenviaosinallimitadobomba.Escolheuseimplementarolimitemximo
em50%porjconseguirsecontrolaroprocessonafaixadesejada,de4a11pH,evitandoo
consumodesnecessriodereagentecido,difcildeserpreparado,duranteostestesreais.
Implementaramseosmesmos limitesna
simulaoparaatingirobjetivosdecomparao
entre os resultados simulados e os reais.O algoritmo de limitao
da ao de controle
tambm corrige o valor de Fa(k) determinado pelo controlador,
utilizado no clculo da
respostadoprocesso.Porexemplo,seovalordeFa(k)forcalculadodetalformaqueexija
uma ao de controle na bombamaior que 50%, o valor corrigido de
tal forma que
correspondaaode50%.Tal correonecessriapoisadiferenade
concentrao
calculadacomasequaesdescritasem(3.12),querequeremavazodecidoenoaao
decontrole.
Opasso7correspondetransformaodaaodecontrolecalculadanopasso6em
uma vazo de concentrado cido, a partir do modelo da bomba
descrito em 3.1.5. A
equao para esta transformao apresentada no Captulo 4.Aps este
passo, caso o
tempodesimulaotenhaatingidoumlimiteprdeterminado,asimulaoencerradae
os resultados relevantes (pHdo tanque, sadada bomba, aode
controle,diferenade
concentrao, dentre outros) so mostrados em grficos. Caso
contrrio, o simulador
retornaaoquartopasso.
-
45
3.4. Implementao dos Controladores
OobjetivomaiordesseprojetocontrolaropHdotanquedemisturadoprocesso.
Como
jditoanteriormente,osconvencionaisPIDnosocapazesdesuprirumcontrole
timo caso o processo varie suas condies operacionais. Por
exemplo, caso o pH da
soluocidavarie,ocontroladorPIDteroseudesempenhoalterado.
AmetodologiadeprojetodecontroladoresPIDadotadamostradano
item3.4.2.
Na tentativadeconseguirummelhorcontrole,sero testadosdois
tiposdecontroladores
adaptativosnaplanta,explicadosnostens3.4.3e3.4.4.Essescontroladoresdependemdos
parmetros estimados da planta. Essa estimao pode ser realizada
online, o que
mostradonoitem3.4.1.
3.4.1. Estimao de Parmetros
O conjuntode equaes (3.12)mostraque esseprocesso
temquatroparmetros a
seremestimados,sendoelesa1a,a1b,b0a,eb0b.Entretanto,comooobjetivoestimaroefeito
dabombadecidonoprocessoeavazodebasepermanecerconstante,omtododeve
ser utilizado para estimar apenas a1a e b0a, considerando que os
outros dois parmetros
fazempartedeumaperturbaoconstantepelomotivodeavazodebasenosealterar.
Talperturbaoresumidanaequao (3.13)aseguirpelo fatord,que
tambmdeveser
estimado,quecorrespondeaummodeloARMAX[Jota,2006],representadopelaequao
dediferenas
1 1 2 2 1 1 2 2 2 2... ...k k k n k n k k k ky a y a y a y b u b
u b u d e = + + + + + ,(3.13)
ondeukaentrada,ykasadaeekorudonoinstantedeamostragemk;dcorrespondea
um fatorque, sediferentedezero, corresponde
introduodeumanolinearidadeno
processo. Os parmetros domodelo podem ser estimados obtendose um
conjunto de
-
46
dadosquereflitaaentrada,Fa(k),easada,y(k),paravriosinstantesdeamostragem.Um
mtodocapazderealizaressatarefaomtododosMnimosQuadrados[Jota,2006].
Essemtodo consiste em determinarum vetor de parmetros que
representam o
processo,,atravsdeseusvetoresdesada,y,edamatrizx.Assadasdoprocessopodem
serdescritaspor
y=x.+e,(3.14a)
1
2
1 10 1 1 0 1 1
2 21 0 2 1 0 2
1
21 2 1 2
n mn
n m
N NN N N n N N N m
m
aa
y ey y y u u u
ay ey y y u u u
by eb
y y y u u u
b
+ +
+ +
= +
#" "" "# #" " " " " " ""
"" #
(3.14b)
onde e o vetor que representa os rudos do processo, e amatriz x
pode sermelhor
entendidaatravsde (3.14b).Aequao (3.14a)nadamaisdoqueuma
representao
vetorialdassadasyiobtidaspormeiode(3.13).
Jota(2006)afirmaqueosparmetrosdoprocessopodem,ento,serestimadospor
LS=(xTx)1xTy.(3.15)
Entretanto,essemtodo requerqueosdados sejam todos
colhidose,apenasaps
essaao,osparmetrospoderiamserestimados.Paraproveracaractersticadeadaptao
docontroladoraoprocesso,odesejvelqueessesparmetrossejamestimadosonline,ou
seja,duranteocontrole.OmtododosMnimosQuadradosRecursivocapazdeestimar
osparmetrosdessaforma,baseadonosltimosvaloresmedidosdasentradasesadado
-
47
processo.Umadesvantagemdesseltimomtodoque,apartirdeumcertonmerode
amostrascolhidas,osvaloresdosparmetrosestimadosnosomaisalterados.
Omtodo dosMnimos Quadrados Recursivo com fator de esquecimento
[Jota,
2006] capaz de considerar apenas uma janela de dados na estimao
dos parmetros,
resolvendoadesvantagemdoltimomtododescritonopargrafoanterior.Jota(2006)cita
queessemtodopermiteaobtenodosparmetrosatravsdasequaes
1{ }T
N N NN
I K x PP = ;(3.16a)1
1 1( )T
N N N N N NK x P x P x = + ;(3.16b)
1 1[ ]TN N NN N NK y x = + ,(3.16c)
nas quais I umamatriz identidade, e corresponde ao fatorde
esquecimento, que se
relacionacomajaneladetempoamostraldesejadapelaequao
1JTAJTA
= ,(3.17)
onde JTA a janelade tempo amostral e xNT corresponderia ltima
linhadamatriz x
mostradaem(3.14b),masparao
instantedeamostragemnoqualaestimaoestsendo
feita.A janeladetempoamostralsignificaquesasltimasJTAamostras
influenciamos
parmetros estimados no instante atual. Por exemplo, se JTA for
escolhida como 100,
comoseapenasosltimos100dadosobtidosdoprocessofossemresponsveispelovalor
atualdosparmetros estimados.Amostras anteriores s 100
amostrasmais recentesno
exerceriam influnciaalguma.AmatrizPN escolhida
aleatoriamenteantesdo incioda
estimao,bemcomoovetordeparmetrosN.Casonosetenhaidiadosparmetrosdo
processo,amatrizPNdeveserescolhidacomvaloreselevados,oquepossibilitaumamaior
-
48
variaonovetordeparmetrosdeumaamostragemparaaoutra.Quantomaisiteraes
sorealizadas,maisosvaloresdessamatrizdiminuem,retirandoaliberdadedeajustedos
parmetrosdoprocessoesignificandoqueoestimadorestsendocapazdedeterminaro
comportamentodoprocesso.Outrosdetalhespodemserencontradosnasnotasdeaulade
Jota(2006).
Devidoconstantenecessidadedemanipulaodematrizes,oquepodeservisto
pelo conjuntode equaes
(3.16),optousepelautilizaodoMatlabparadeterminaros
parmetrosdoprocesso.
Nesse
trabalhoserempregadoomtododosMnimosQuadradosRecursivocom
fatorde esquecimento.A entrada considerada foi avazode
cido,Fa(k).Como sequer
estimary(k)apartirdeFa(k),masFb(k)tambminfluencianessevalor(3.12),deveseestimar
tambmoefeitodeFb(k)emy(k).Comoavazodebaseconstante,apartirdeumcerto
tempoaparceladoefeitodeFb(k)noprocesso tambmse
tornaconstante.Considerando
essaperturbaoconstante,podeseassumirqueoparmetrodnaequao(3.13)capazde
representar esseefeito.Dessa forma,a
inclusodaestimaodoparmetrodnomtodo
tornapossvelumamelhoraproximaodosoutrosdoisparmetros,a1aeb0a,aosvalores
reais.
Paraentendermelhor,considereasomadasequaes(3.12a)e(3.12b)
1 0 1 0( ) ( 1) ( 1) ( 1) ( 1)a a a a b b b by k a y k b F k a y
k b F k= + + .(3.18)
Atravsdaequao(3.12c),temseque
( ) ( ) ( )a by k y k y k= (3.19)
Substituindose(3.19)em(3.18)
-
49
1 0 1 1 0( ) ( 1) ( 1) ( ) ( 1) ( 1)a a a a b b b by k a y k b F
k a a y k b F k= + + + .(3.20)
Pormeiodatransformaoemequaodediferenasdasfunesdetransferncias
dadaspor(3.5a)e(3.5c),sabesequea1aea1btmomesmovalor.Portanto,
1 0 0( ) ( 1) ( 1) ( 1)a a a b by k a y k b F k b F k= + +
,(3.21)
ondeoltimotermocorrespondeaoparmetroddomodeloARMAXdadoem(3.13).
Assim sendo, o mtodo dos Mnimos Quadrados Recursivo com Fator
de
Esquecimentoserutilizadoparaestimarosparmetrosa1a,b0aedpormeiodey(k),Fa(k)ea
unidade,fatormultiplicadordednaequaodomodeloARMAX.Temseento
1 0[ ]T
a aa b d = ,e(3.22a)[ ( 1) ( 1) 1]N ax y k F k= ,(3.22b)
comPNsendoumamatriz3x3,eKNeescalares.
3.4.2. Controlador Proporcional Integral Derivativo (PID)
O controlador PID ser implementado de forma a possibilitar uma
ligeira
comparaoentreodesempenhodoscontroladoresadaptativosescolhidosedoPID.
Tal controlador possui uma formulao simples, que consiste em,
basicamente,
aplicarumaaodecontroleproporcionalaoerroentreovalordesejadorefernciaea
varivel de processo. Essa ao chamada de ganho proporcional. A ao
integral
possibilitaremoveroerroemestadoestacionrio,queapareceaoseutilizarsomenteaao
proporcional,eaaoderivativacapazdediminuirasoscilaesdasada,aumentandoa
velocidadederespostadocontrolador.
Aequaoclssicaparaessecontrolador,emtermosdefunodetransferncia
-
50
1( ) 1 ( ) ( )di
U s K E s sT Y ssT
= + ,(3.23)
ondeU(s) a ao de controle, E(s) o erro e Y(s) a varivel de
processo; K o ganho
proporcional e Ti e Td so os tempos integral e derivativo,
respectivamente. O erro
definidocomo
( ) ( ) ( )E s R s Y s= ,(3.24)
ondeR(s)correspondereferncia.
Para derivar o controlador discreto, necessrio lanar mo de algum
tipo de
discretizao.Escolhendoadiscretizaoretangular,naqual
11
s
zsT
,(3.25)
temseque
1 1 11( ) 1 (1 ) ( )(1 )
s d
i s
T TU z K z E zz T T
= + + ,(3.26)
gerandoaequaodediferenas
0 1 2( ) ( 1) ( ) ( 1) ( 2)u k u k b e k b e k b e k= + + +
,(3.27)
onde
-
51
0 1 s di s
T Tb KT T
= + + ;(3.28a)
1 1 2 ds
Tb KT
= + ;(3.28b)
2d
s
Tb KT
=
.(3.28c)Detalhessobreessadiscretizaopodemserencontradosem[JotaePena,1993].
Amalhafechadadestecontroladornaplantatalcomomostradapelodiagramade
blocos da Figura 6. A referncia dada em pH e linearizada para a
diferena de
concentraopeloblocopH>Y.AmedidadopHtambmlinearizadapelomesmobloco,
esomenteapsessasduastransformaesoerrocalculado.Valeobservarque,pelofato
de a relao entrepH eY,mostradanoApndice I, serno linear,o
erronopode ser
calculadodiretamentepara os valores de pH para ser linearizado
logo depois,poisum
valordiferenteseriaobtido,comprometendoodesempenhodamalhadecontrole.
FIGURA 6 - Diagrama de Blocos da Malha de Controle Utilizando
PID
OmtododesintoniaescolhidoparaestecontroladorfoiomtodoZieglerNichols
semsobreelevao(overshoot)[Jota,1998].Talmtodoconsisteemcolocarotempointegral
eminfinitoeotempoderivativoemzero,oquecorrespondeaanularasduasaes.Aps
esseprocedimento,aumentaseoganhoproporcionalatqueamalha
fechadaapresente
umaoscilao cuja amplitude constante.Oganho crtico,Kcu,
corresponde aovalordo
-
52
ganhoproporcionalquepromoveu taisoscilaes.Operodo
crtico,Pu,equivalenteao
perododaoscilao.Osparmetrosdocontroladorso,ento,dadospor
0, 2 cuK K= ;(3.29a)
2u
iPT = ;e(3.29b)
3u
dPT = .(3.29c)
Apsadeterminaodosparmetros,odesempenhodocontroladorfoitestadoem
simulao,eocontroladorprojetadonosimuladorestendidoaoprocesso
real.Ambosos
resultadossoapresentadosnoCaptulo6.
3.4.3. Controlador de Varincia Mnima Generalizado (GMV)
O GMV, ou Controlador de Varincia Mnima Generalizado, tem por
objetivo
proporcionarumcontroledoprocessode tal
formaqueavarinciadasadasejaamenor
possvel.Almdisso,caractersticassecundriasdeerronuloemestadoestacionrioede
escolha do desempenho do controlador podem ser estabelecidas. A
descrio do
controladoraquiredigidabaseadanasnotasdeauladeJota(2006).AFigura7mostrao
diagramadeblocosdamalhafechadacomestecontrolador.Oelointernocompeamalha
de controle do processo. Tanto a referncia quanto a varivel de
processo so entradas
diretas do controlador, diferentemente do PID. J o elo externo
responsvel pela
estimaoonlinedosparmetrosdoprocessoeajustedosparmetrosdocontrolador,oque
promovecapacidadedeadaptaosmudanasdecomportamentodoprocesso.
-
53
FIGURA 7 - Diagrama de Blocos da Malha Fechada com Controladores
Adaptativos
Primeiramente, considerase que o processo pode ser descrito por
um modelo
ARMAXdotipo
1 1 1( ) ( ) ( )rk k kA z y z B z C z d = + + ,(3.30)
ondekoinstantedeamostragem,rotempomortodoprocessoemamostragens,ka
aodecontrole(MV),ykavariveldeprocesso(PV)ekcorrespondenteaumrudo
branco, no instante de amostragem k.O parmetro d um termo que
indica uma no
linearidadedoprocessocasosejadiferentedezero.A(z1),B(z1)eC(z1)sopolinmiosem
domniodiscreto,sendoqueA(z1)correspondeaosplosdoprocessoemmalhaaberta,e
B(z1), aos zeros. Esse modelo idntico ao descrito pela equao
(3.13),mas agora
apresentadodeoutraforma.
Paratanto,osinaldecontrolekcalculadopelomesmodevesercorrespondenteao
valortimoqueminimizaafunodecustoprestabelecida
*2|{ }k r kJ E += ,(3.31)
naqual
-
54
1 1 1( ) ( ) ( )k k k r k rP z y Q z R z = + .(3.32)
Nessas equaes, kr o valor da referncia no instante kr. P(z1),
Q(z1) e R(z1) so
polinmiosemdomniodiscreto.Apartirdaminimizaode(3.31),possveldeterminara
aodecontroleapartirde
k k dk
CR Fy P dEB CQ
= + ,(3.33)
de onde Pd(z1) corresponde ao denominador de P(z1), e E(z1) e
F(z1) podem ser
determinadosdiretamenteapartirdeC(z1)eA(z1)atravsdaequaodiofantinadadapor
1 1 1 1( ) ( ) ( ) ( )rC z E z A z z F z = + .(3.34)
MaioresdetalhespodemserencontradosnasnotasdeauladeJota(2006).
Aderivaodessasequaesbaseadaemumpreditortimo,cujafunoprevero
valordasadaapsotempomortodoprocesso.Avarinciamnimadoprocesso,ento,
determinadapelorudodoprocesso,consideradoemk,epeloerrodepredio.
O controlador quepossibilitaria realmenteumavarinciamnima seria
aqueleno
qualQ(z1)fosseigualazero.Entretanto,talsituaotornariaocontroladorinstvelcasoa
plantaapresentassezerosdefasenomnima.IssosignificariaqueopolinmioB(z1)seria
instvel,fazendocomqueaequao(3.33)resultasseemumcontroladortambminstvel.
AintroduodeQ(z1)consegue,portanto,estabilizarocontrolador,aocustodeumamaior
varinciada sada. Se for apenasum escalar,Q(z1) funciona
comoumpesono sinalde
controle que, quantomaior, promove umamenor varincia do sinal de
controle e uma
maiordosinaldesada.Emoutraspalavras,esseparmetrofuncionacomoumparmetro
desintoniadocontrolador.Quantomenor,piorodesempenhodocontrolador,eviceversa.
-
55
OutrafunodeQ(z1)proverumaaointegradoranocontroledoprocesso.Aformade
fazerissomostradamaisadiantenestemesmoitem.
Umacuriosidade,percebidapormeiode(3.32),adequeR(z1)podeserescolhido
de forma a prever as referncias futuras na tentativa de melhorar
o desempenho do
controlador.Essepolinmiopodeserelaboradoparater,porexemplo,ocomportamentode
um filtrodemdiamvel.AprevisoprovidaporR(z1)se tornadeextrema
importncia
para reduzir a varincia da sada caso omesmo seja bem
determinado, principalmente
quando a referncia determinadaporum outro controlador, ou seja,
o escravodeum
controleemcascata.
OutrapeculiaridadedoGMVsedemP(z1).Porinfluenciardiretamenteemyk,tal
polinmiopodeserprojetadoparadesempenharopapeldeumfiltronaPV,oquereduza
variaonosinaldecontrole.
Dessa forma, para apliclo na planta de pH, considerase a equao
(3.12a),
correspondente(3.30).Assim,temosque
1 11( ) 1 aA z a z
= + ,(3.35a)1
0( ) aB z b = ,e(3.35b)
1( ) 1C z = .(3.35c)
C(z1) considerado igual unidade pois suamodelagem muito avanada,
e foge ao
escopodesse
trabalho.Talespecificaodevesersuficienteparaproverumbomcontrole
doprocesso.
Pormeiodoconjuntodeequaes(3.35),derivamse
1( ) 1E z = e 1 1( ) aF z a = ,(3.36)
-
56
de forma a respeitar (3.34).Parapermitiruma ao
integradoranoprocesso,demodoa
propiciarumcontrolesemerroemestadoestacionrio,definese
1 1( ) (1 )Q z z = ,(3.37)
onde o parmetro que funciona como um peso no sinal de
controle.Omesmo foi
determinadopormeiode simulaopelomtodode tentativa e
erroparaverificarqual
valorapresentaumarespostatimareferncia,semprejudicarmuitoavarinciafinaldo
pHdotanquedemistura.
Tendoemvistaqueoprocessomantersuarefernciaemummesmovalordurante
umbomintervalodetempo,podeseconsiderar
1( ) 1R z = .(3.38)
AdefiniodopolinmioP(z1)adequeelecorresponderumfiltroButterworth
deprimeiraordem,demodoquesuafrequnciadecortesejadezvezesmaioremrelao
de amostragem, para no influir na dinmica do processo e nem
falsear o sinal da PV.
Dessaforma,asfunesdetransfernciacontnuaediscretadofiltroso
s
s
2 .10/T(2 .10/T ) 1s
+ ;(3.39a)
11
11 dp z
,(3.39b)ondepd1= 2 .10e .
Podese,ento,derivaraequaodocontroladordiscretopormeiode(3.33),como
tempomortoriguala1,comosendo
-
57
1 1 1 0 1 1 2
0
[ ( ) ]k d k k d k d kk
p a y p b Fa p Fa dFab
+ + + + = + .(3.40)
Vale ressaltar apenas que o tempomorto igual unidade devido ao
fato de a
funodetransferncia(3.2)noapresentartempomortoeoextrapoladordeordemzero,
utilizadonastransformaesanalgicadigital,A/D(PVlidapelosensor/discretizadapelo
PLC)edigitalanalgica,D/A,introduzirumtempomortoequivalenteaumaamostragem.
Quando o controlador projetado na simulao apresentou bom
desempenho, o
mesmofoiimplementadoemlinguagemDelphiparaseraplicadonaplanta.Osoftwareque
comunicaosdadosdoCLPcomoPCjexiste,projetadoporRocha(2006),sendoalterado
apenasparacomportaressecontrolador,cujaimplementaofinaldiscutidanoCaptulo
5.
3.4.4. Controlador Preditivo Generalizado (GPC)
OControladorPreditivoGeneralizado,ouGPC(GeneralizedPredictiveControl),vem
comoumanovaalternativaemtermosdecontroleadaptativo.Aocontrriodocontrolador
devarinciamnima,estenoapresentaproblemasemrelaoincertezanotempomorto
doprocesso e sobreparametrizaodomodelo [Jota,2006].Ou
seja,opolinmioB(z1),
descritono itemanterior,poderia
serdeordemmaiorqueaesperada,descontandoseo
tempomorto,queoGPCaindaconverge.Estacaracterstica
tornaocontroladorcapazde
lidartantocomprocessossimpleseconhecidos,quantocomprocessosmaiscomplexosede
maiordificuldadedecontrole,comoosdefasenomnimaetempomortoelevado.Todas
asobservaesrelatadasnesse item
tambmforamretiradasebaseadasnasnotasdeaula
deJota(2006).
Afilosofiadestecontroladorutilizarummodelodoprocesso,oupreditor,capazde
proveraomesmoacapacidadedecalcularasuaaodecontrolebaseadanosomenteem
umaprediodeumpasso frente,mas emuma janeladepredies futuras,
chamada
-
58
horizontedepredio.Paracompreenderessenovoconceito,imagineserummotorista.Os
controladorescomunssecomportamcomosefossemmotoristasqueolhassemapenaspara
o local no qual ospneus tocam o cho. Entretanto, todos
osmotoristas olham paraum
horizonteestendido,queconsideraascurvasqueexistemfrente,apresenadeburacos,
de sinais de trnsito, carros estacionados, pedestres, dentre
outros, para tomar suas
decises.Essaa
idiadohorizontedepredio:definiraaodecontrolequefarcom
queoprocessosigadamelhorformaasuarefernciainstantneaefuturamente.
Outra questo inovadoranesse controlador o fatode que omesmo no
calcula
apenasumaaodecontrole,masvrias,sendocadaumaparauminstantedeamostragem
futuro.Dessa forma,oGPC temmaisgrausde
liberdadeeconsegueproverumcontrole
commelhor desempenho em relao aos demais controladores.O nmero
de aes de
controlequeoGPCcalculadefinidocomosendoohorizontedecontrole,sendoqueas
aescalculadasrespeitamafreqnciadeamostragem.Talhorizontesempremenorque
odeprediobastalembrarqueimpossvelomotoristatomarumadecisosobreoque
fazeraps realizaruma conversoantesde tla realizadoe
saberoqueencontrarpela
frente.Entretanto,asaesnosoaplicadassempreconformeprogramado;acadainstante
deamostragem,osclculos so refeitos.Seoprocesso
tiverumbomcomportamento,ou
seja, caso sejapoucoperturbado, substancialmente as aesde
controle calculadas sero
prximas quelaspreviamenteprogramadas.O clculo em cada
instantedeamostragem
permite ao GPC lidar com perturbaes externas que aconteam entre
um instante de
amostragemeoutro,oquenoaconteceriacasoasaesprogramadasfossemdiretamente
aplicadasnoprocesso.
Paraderivaroclculodaaodecontrole,vriassuposiessofeitas.Aprimeira
delas adeque, apsohorizontede controle,o sinalde controle
mantido constante.
Outrassomostradasnodecorrerdesseitem.
Umadasdiferenasemrelao