Embed Size (px)
DESCRIPTION
Laboratorio Máquinas Asíncronas de Rotor Bobinadoa
Citation preview
LABORATORIO N° 2
“MOTOR DE ROTOR BOBINADO”
GRUPO N° 2:
- ASPILCUETA NARVAEZ, ALVARO 20110067G- CUBA PALOMINO, HAIROQ 20082602D- GUEVARA HINOJOSA, LUIS MIGUEL 20092002J- RAMOS ESPINOZA, ALEJANDRO 20110073G- RIVERA CAMARENA, MANUEL 20097010K- SIBLESZ CURAY, JORGE 20092034I
FECHA : 20/04/15
2015-I
1
INTRODUCCION
Las máquinas asíncronas de rotor bobinado se utilizan en aplicaciones donde el torque de las cargas son muy exigentes, su construcción es mucho más compleja que los motores tipo jaula de ardilla. Los motores de anillos rozantes constan de:
• Un arrollamiento trifásico correspondiente al estator.• Un arrollamiento trifásico correspondiente al rotor, que es una imagen
reflejada del devanado del estator, generalmente se conectan en estrella y sus extremos van a los anillos rozantes los mismos que puede colocarse en cortocircuito a través de las escobillas para trabajo normal.
• También se puede insertar un banco de resistencias para que en el momento del arranque se limite la corriente y se eleve el torque. Asimismo se puede regular la velocidad modificando la característica Par-Velocidad del motor.
En los terminales del rotor se induce una tensión alterna sinusoidal a manera de transformador, cuya tensión es función de la relación entre el número de espiras del estator y del rotor, con la frecuencia idéntica a la fuente.
2
OBJETIVOS
Los objetivos del presente laboratorio son:
Hacer conocer la constitución electromecánica de los motores asíncronos. Familiarizarse con la simbología y conexionado de las máquinas eléctricas
de nuestro laboratorio en los ensayos según las normas establecidas. Conexión y puesta en servicio del motor. Inversión del sentido de giro (utilizando un conmutador manual) A partir de los ensayos realizados obtener el circuito monofásico
equivalente. Registro de los valores característicos y curvas características (FP, EF,
Torque) de funcionamiento específicas de las máquinas asíncronas. Evaluación de las mediciones realizadas y registradas. Presentación del protocolo de pruebas según normas establecidas.
FUNDAMENTO TEORICO
3
Principio de Funcionamiento de las Máquinas Asíncronas o de Inducción Trifásicas
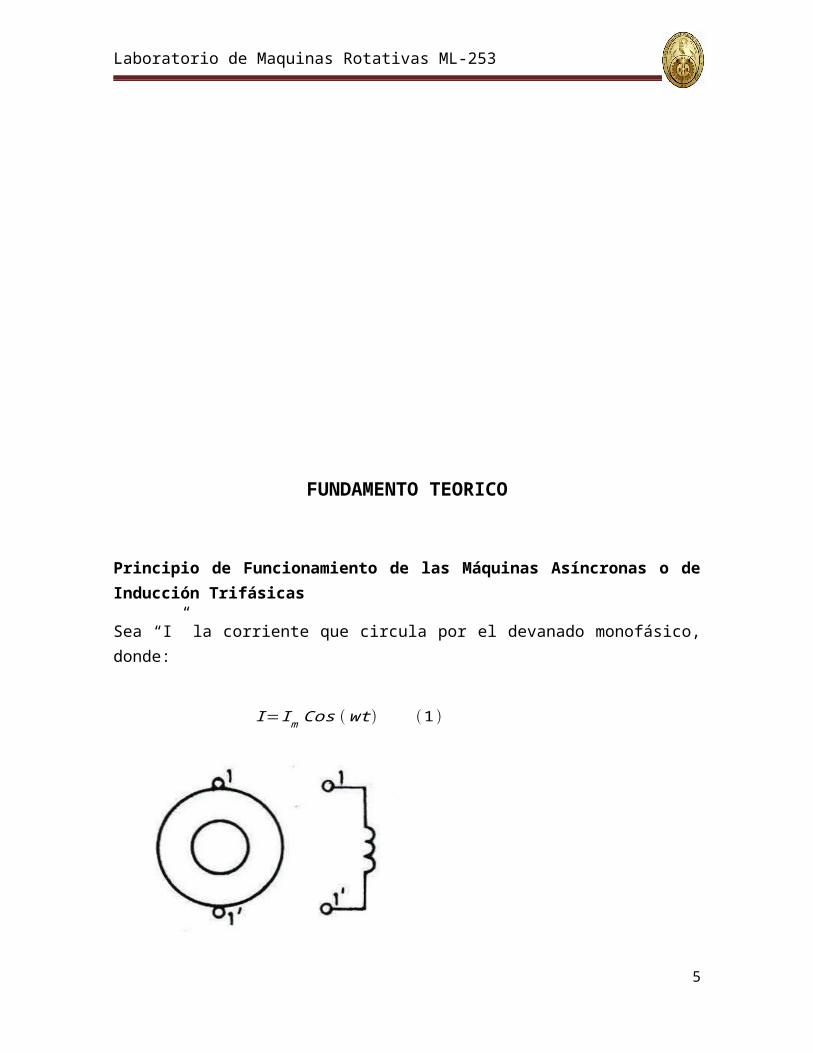
Sea “I” la corriente que circula por el devanado monofásico, donde:
El campo magnético generado por una sola fase, tiene la siguiente forma:
Donde, “P” es el número de pares de polos de la máquina.
Reemplazando, la ecuación (1) en (2), se tendrá:
El cual representa a un campo magnético alterno o pulsante.
Campo Magnético Generado por una Fase.
Requisitos para Generar un Campo Magnético Giratorio
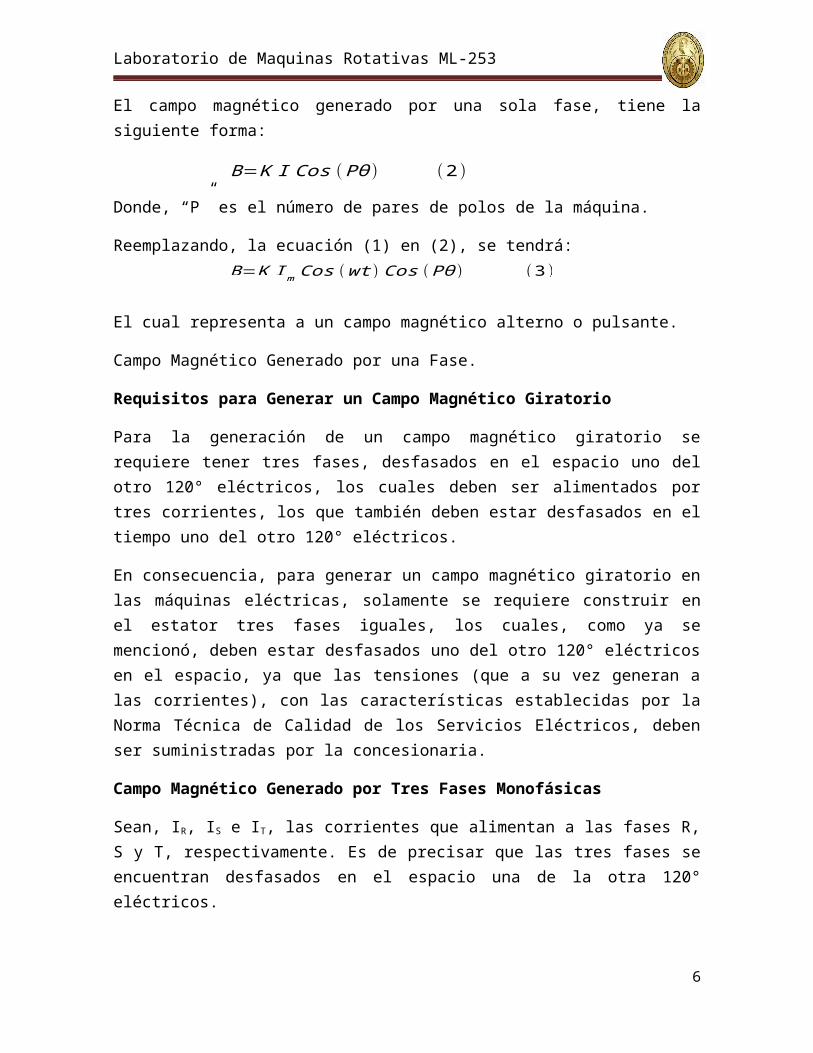
Para la generación de un campo magnético giratorio se requiere tener tres fases, desfasados en el espacio uno del otro 120° eléctricos, los cuales deben ser alimentados por tres corrientes, los que también deben estar desfasados en el tiempo uno del otro 120° eléctricos.
En consecuencia, para generar un campo magnético giratorio en las máquinas eléctricas, solamente se requiere construir en el estator tres fases iguales, los cuales, como ya se mencionó, deben estar desfasados uno del otro 120° eléctricos en el espacio, ya que las tensiones (que a su vez generan a las corrientes), con
4
I=Im Cos (wt ) (1 )
B=K I Cos (Pθ) (2 )
B=K Im Cos (wt ) Cos (Pθ) (3)
las características establecidas por la Norma Técnica de Calidad de los Servicios Eléctricos, deben ser suministradas por la concesionaria.
Campo Magnético Generado por Tres Fases Monofásicas
Sean, IR, IS e IT, las corrientes que alimentan a las fases R, S y T, respectivamente. Es de precisar que las tres fases se encuentran desfasados en el espacio una de la otra 120° eléctricos.
Dónde:
Los campos que generan las corrientes IR, IS e IT, serán:
Cabe reiterar que las fases R, S y T, se encuentran desfasados uno con respecto al otro 120 ° eléctrico.
El campo magnético generado por las tres fases es BTotal, se obtiene sumando los campos de las tres fases; es decir:
5
IR=Im Cos (wt )
IT=Im Cos (wt−240 °)
I S=Im Cos (wt−120 ° )
BR=K Im Cos (wt ) Cos (Pθ)
BS=K Im Cos (wt−120 ° ) Cos (Pθ−120 ° )
BT =K Im Cos (wt−240° ) Cos (Pθ−240 °)
BTotal=BR+BS+BT=32K Im Cos (Pθ−wt )
Esta fórmula representa la ecuación de un campo magnético giratorio y puede representarse de la siguiente forma:
BTotal=Bmáximo Cos (Pθ−wt )
En consecuencia, el campo magnético generado por tres fases desfasados 120° eléctricos en el espacio y alimentados por corrientes desfasadas en el tiempo 120° eléctricos, es del tipo giratorio, con lo cual se demuestra que el motor de inducción trifásico tiene par de arranque.
Velocidad del Campo Magnético Giratorio
Sabemos que:
Dónde: P: Número de pares de polos=p/2
Para un punto del campo magnético:
La velocidad a la que gira el campo magnético giratorio (w) (llamado también velocidad síncrona), se halla de la siguiente manera:
6
TSRTotal BBBB
)()( PCoswtCosIKB mR
)120()120( PCoswtCosIKB mS
)240()240( PCoswtCosIKB mT
)(2
3wtPCosIKBBBB mTSRTotal
BTotal=Bmáximo Cos (Pθ−wt )
Cos(Pθ−wt )=Cte .⇒Pθ−wt=Cte .
p2θ−wt=Cte .
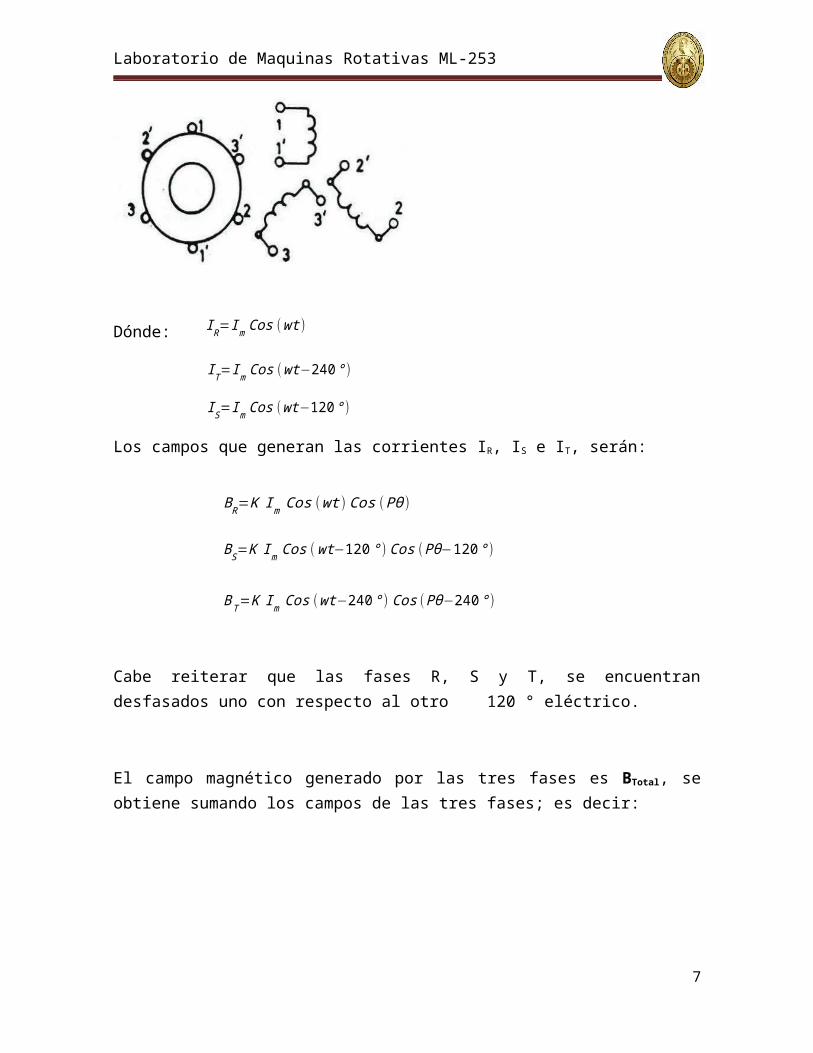
Como se mencionó, el estator está formado por tres (3) fases iguales desfasados en el espacio 120° eléctricos, tal como se muestra:
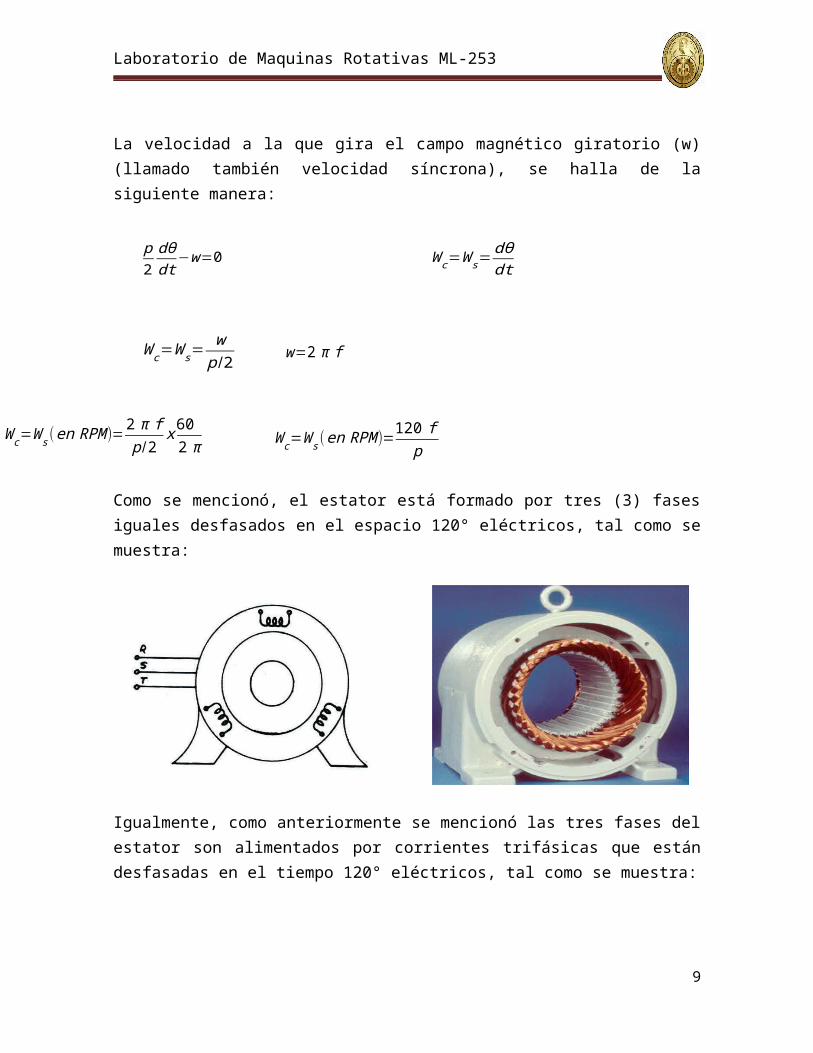
Igualmente, como anteriormente se mencionó las tres fases del estator son alimentados por corrientes trifásicas que están desfasadas en el tiempo 120° eléctricos, tal como se muestra:
7
p2dθdt
−w=0 W c=W s=dθdt
W c=W s=wp /2
w=2 π f
W c=W s( en RPM )=2 π fp /2
x602 π
W c=W s( en RPM )=120 fp

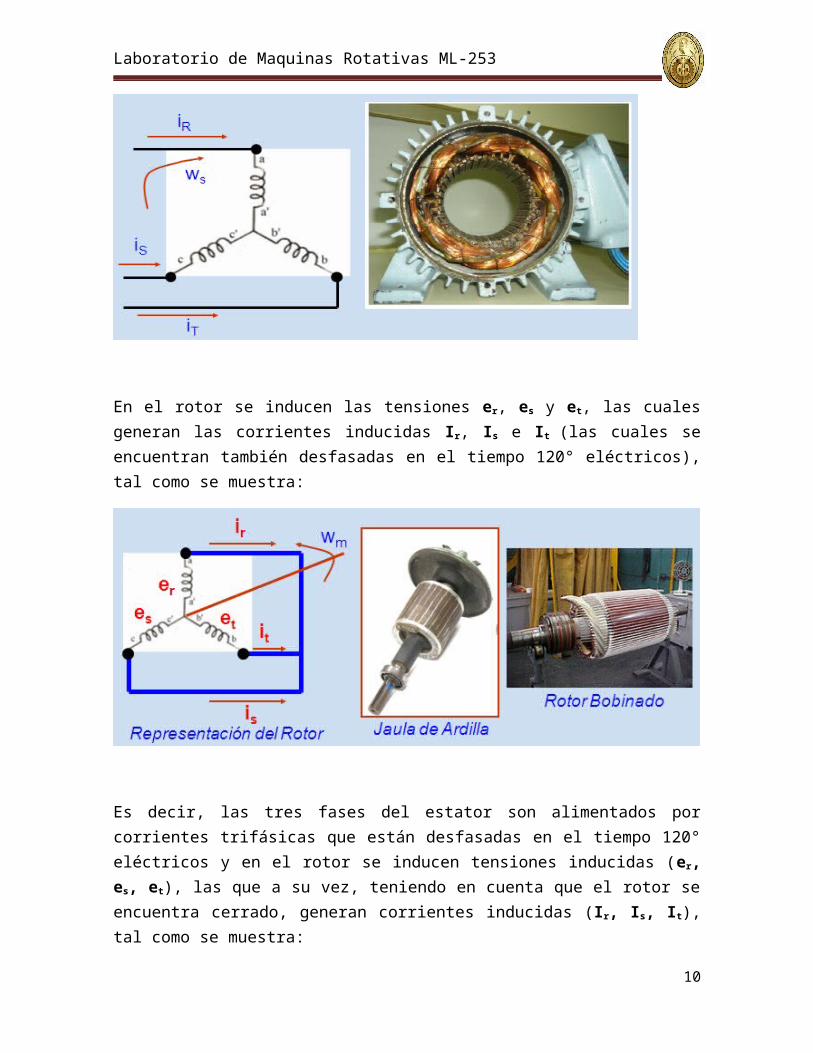
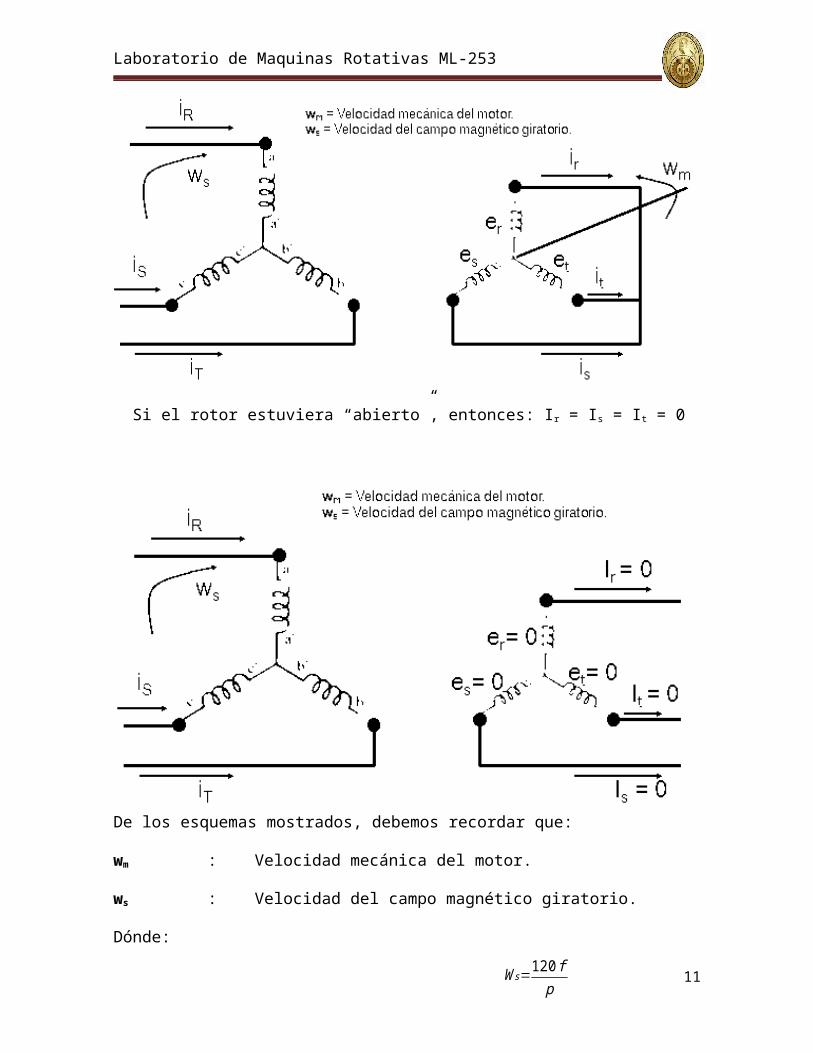
En el rotor se inducen las tensiones er, es y et, las cuales generan las corrientes inducidas Ir, Is e It (las cuales se encuentran también desfasadas en el tiempo 120° eléctricos), tal como se muestra:
Es decir, las tres fases del estator son alimentados por corrientes trifásicas que están desfasadas en el tiempo 120° eléctricos y en el rotor se inducen tensiones inducidas (er, es, et), las que a su vez, teniendo en cuenta que el rotor se encuentra cerrado, generan corrientes inducidas (Ir, Is, It), tal como se muestra:
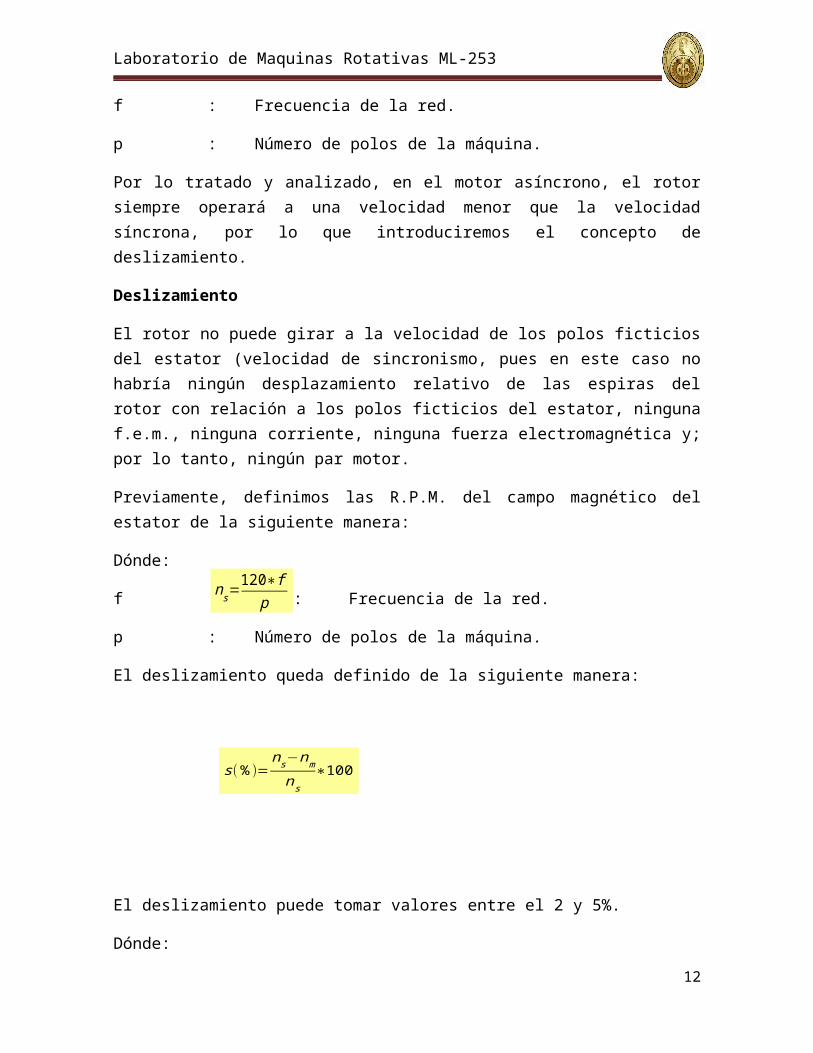
Si el rotor estuviera “abierto”, entonces: Ir = Is = It = 0
8
De los esquemas mostrados, debemos recordar que:
wm : Velocidad mecánica del motor.
ws : Velocidad del campo magnético giratorio.
Dónde:
f : Frecuencia de la red.
p : Número de polos de la máquina.
Por lo tratado y analizado, en el motor asíncrono, el rotor siempre operará a una velocidad menor que la velocidad síncrona, por lo que introduciremos el concepto de deslizamiento.
Deslizamiento
El rotor no puede girar a la velocidad de los polos ficticios del estator (velocidad de sincronismo, pues en este caso no habría ningún desplazamiento relativo de las espiras del rotor con relación a los polos ficticios del estator, ninguna f.e.m., ninguna corriente, ninguna fuerza electromagnética y; por lo tanto, ningún par motor.
Previamente, definimos las R.P.M. del campo magnético del estator de la siguiente manera:
Dónde:
9
W s=120 fp
ns=120∗fp
f : Frecuencia de la red.
p : Número de polos de la máquina.
El deslizamiento queda definido de la siguiente manera:
El deslizamiento puede tomar valores entre el 2 y 5%.
Dónde:
ns : Velocidad de sincronismo o velocidad del campo magnético giratorio.
nm : Velocidad del motor (velocidad del rotor).
Tipos de motores asíncronos trifásicos o de inducción
Como se mencionó las máquinas asíncronas trifásicas o de inducción generalmente se utilizan como motores; por este motivo, en el curso solamente analizaremos a este tipo de máquinas como motores. Los tipos de motores asíncronos trifásicos o de inducción, se deben al tipo de sus rotores.
Existen dos tipos de rotores para los motores asíncronos o de inducción trifásicos: Jaula de Ardilla y Anillos Rozantes, por lo que los motores, dependiendo del tipo de su rotor, serán Motores de Jaula de Ardilla y Motores de Anillos Rozantes (llamado también motores de rotor bobinado), respectivamente.
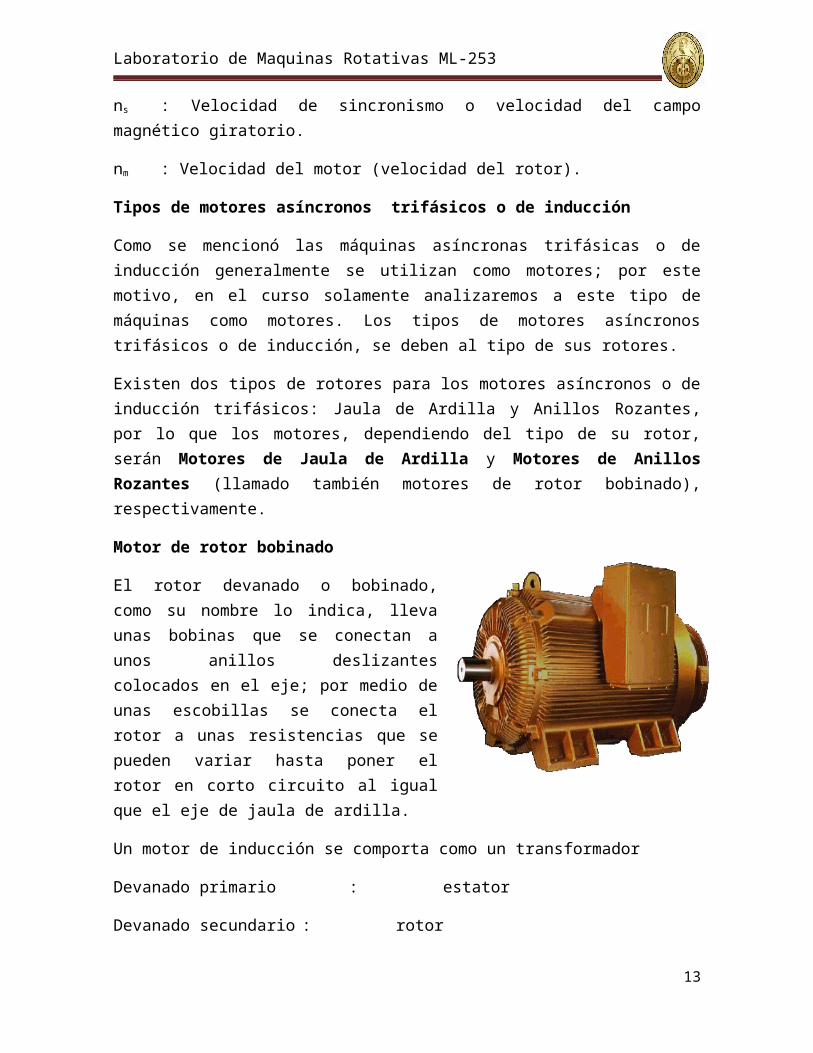
Motor de rotor bobinado
El rotor devanado o bobinado, como su nombre lo indica, lleva unas bobinas que se conectan a unos anillos deslizantes colocados en el eje; por medio de unas escobillas se conecta el rotor a unas resistencias que se pueden variar hasta poner el rotor en corto circuito al igual que el eje de jaula de ardilla.
10
s(%)=ns−nmns
∗100
Un motor de inducción se comporta como un transformador
Devanado primario : estator
Devanado secundario : rotor
La corriente del devanado primario (estator) crea un campo magnético giratorio, el cual induce una corriente en el devanado secundario (rotor). La corriente del rotor junto con el campo magnético inducido provoca una fuerza, que es la causa de la rotación del motor.
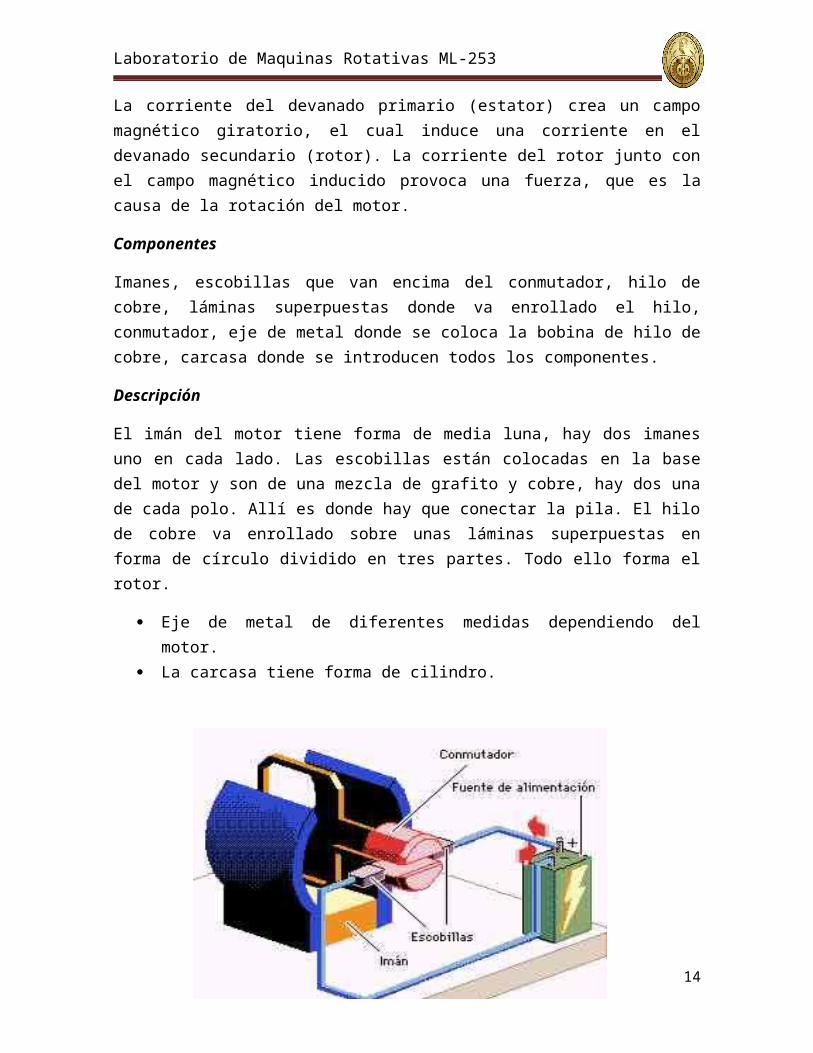
Componentes
Imanes, escobillas que van encima del conmutador, hilo de cobre, láminas superpuestas donde va enrollado el hilo, conmutador, eje de metal donde se coloca la bobina de hilo de cobre, carcasa donde se introducen todos los componentes.
Descripción
El imán del motor tiene forma de media luna, hay dos imanes uno en cada lado. Las escobillas están colocadas en la base del motor y son de una mezcla de grafito y cobre, hay dos una de cada polo. Allí es donde hay que conectar la pila. El hilo de cobre va enrollado sobre unas láminas superpuestas en forma de círculo dividido en tres partes. Todo ello forma el rotor.
Eje de metal de diferentes medidas dependiendo del motor. La carcasa tiene forma de cilindro.
11
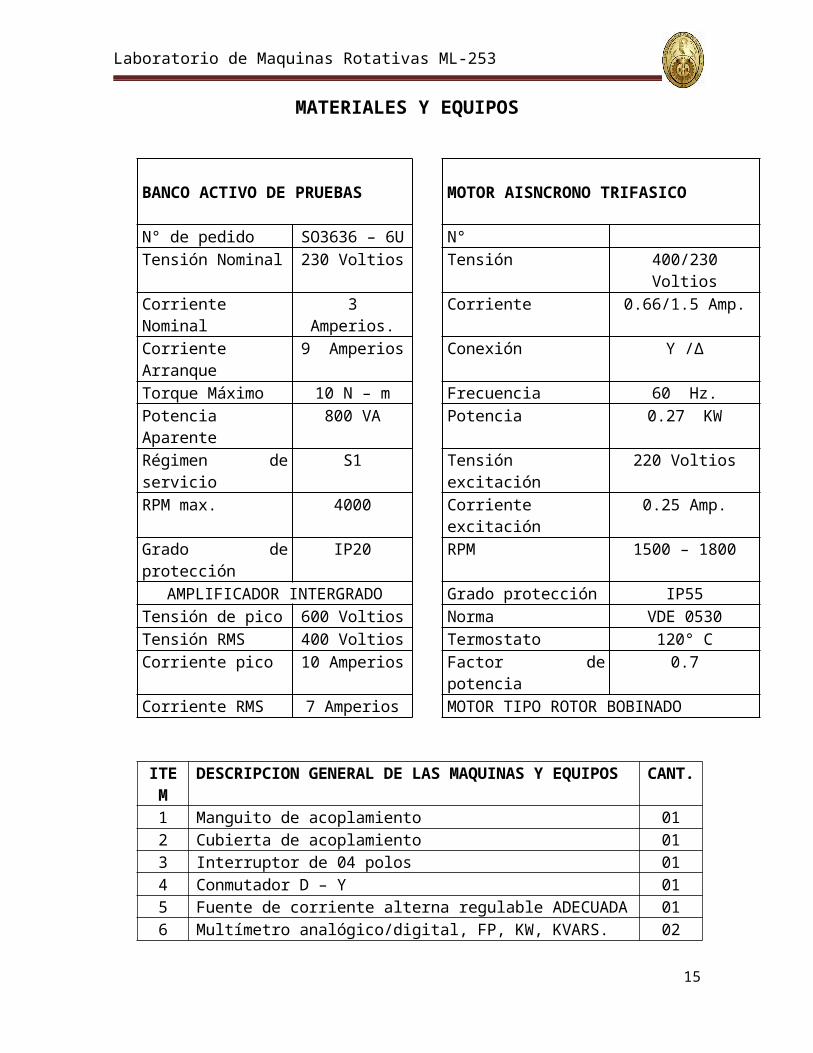
MATERIALES Y EQUIPOS
BANCO ACTIVO DE PRUEBAS MOTOR AISNCRONO TRIFASICO
N° de pedido SO3636 – 6U N°Tensión Nominal 230 Voltios Tensión 400/230 VoltiosCorriente Nominal 3 Amperios. Corriente 0.66/1.5 Amp.Corriente Arranque 9 Amperios Conexión Y /ΔTorque Máximo 10 N – m Frecuencia 60 Hz.Potencia Aparente 800 VA Potencia 0.27 KWRégimen de servicio S1 Tensión excitación 220 VoltiosRPM max. 4000 Corriente excitación 0.25 Amp.Grado de protección IP20 RPM 1500 – 1800
AMPLIFICADOR INTERGRADO Grado protección IP55Tensión de pico 600 Voltios Norma VDE 0530Tensión RMS 400 Voltios Termostato 120° CCorriente pico 10 Amperios Factor de potencia 0.7Corriente RMS 7 Amperios MOTOR TIPO ROTOR BOBINADO
ITEM
DESCRIPCION GENERAL DE LAS MAQUINAS Y EQUIPOS CANT.
1 Manguito de acoplamiento 012 Cubierta de acoplamiento 013 Interruptor de 04 polos 014 Conmutador D – Y 015 Fuente de corriente alterna regulable ADECUADA 016 Multímetro analógico/digital, FP, KW, KVARS. 027 Multímetro digital FLUKE 018 Unidad condensadora 019 Conectores de seguridad 0410 Juego de cables de 4 mm² 25
12
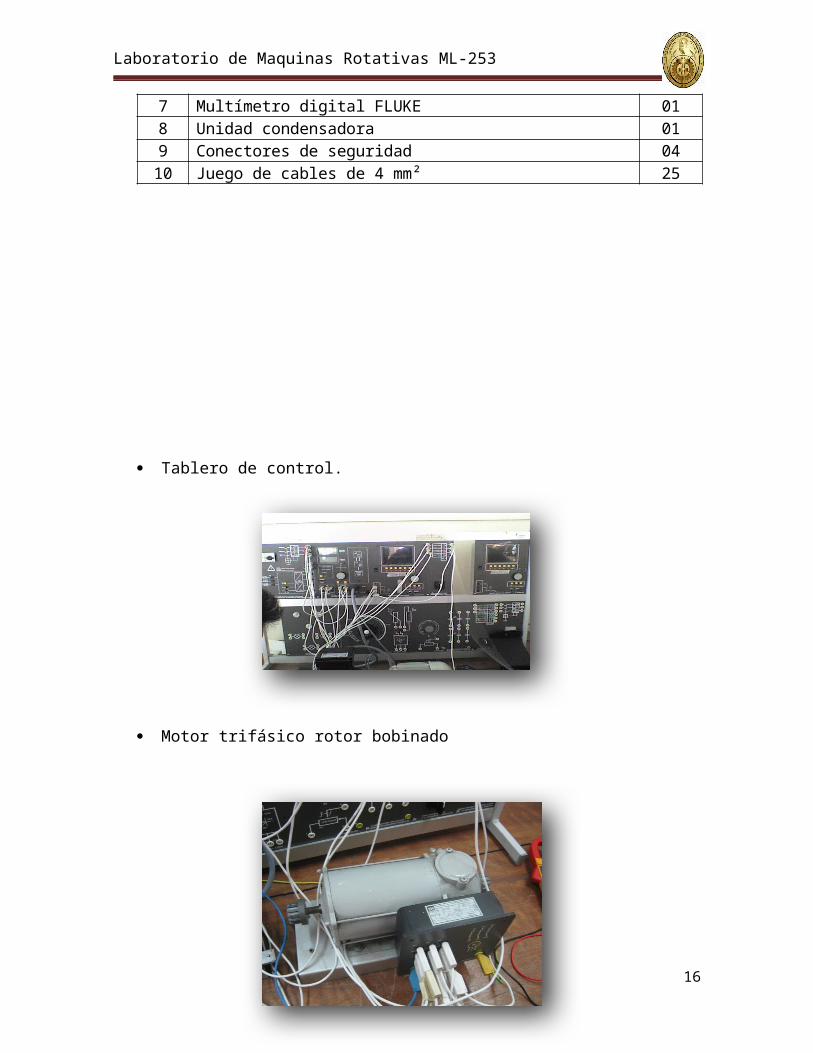
Tablero de control.
Motor trifásico rotor bobinado
13
Fuente de alimentación.
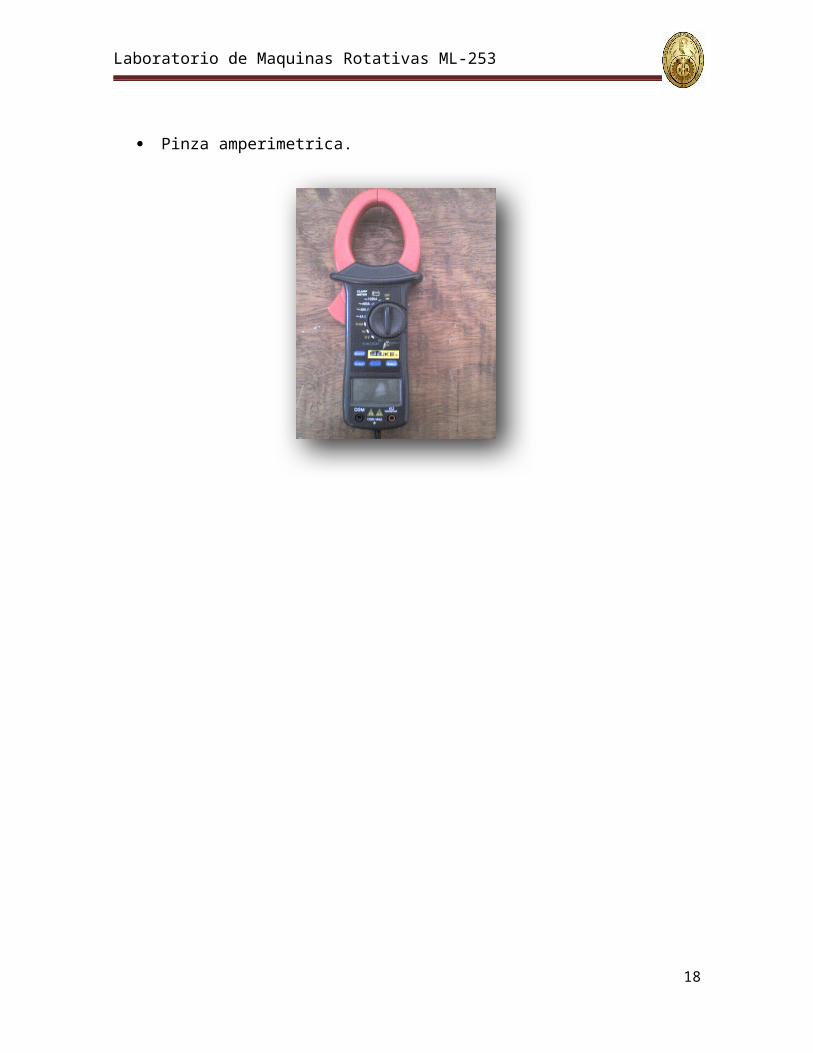
Pinza amperimetrica.
14
15
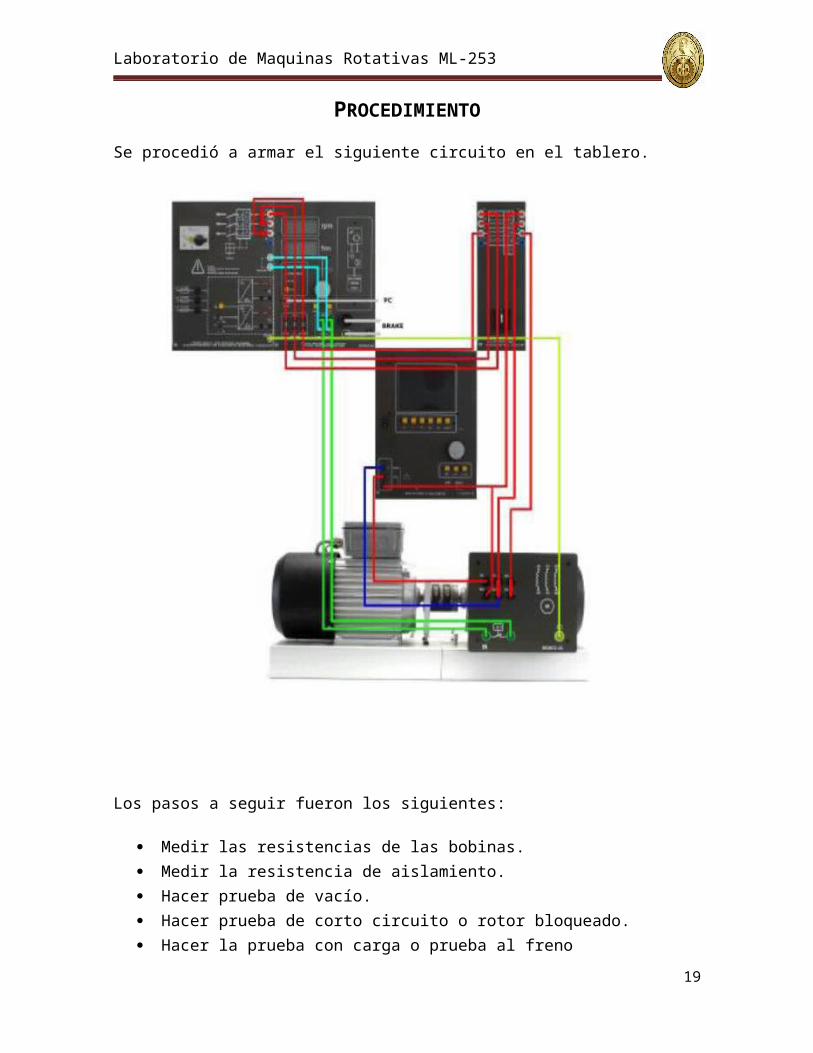
PROCEDIMIENTO
Se procedió a armar el siguiente circuito en el tablero.
Los pasos a seguir fueron los siguientes:
Medir las resistencias de las bobinas. Medir la resistencia de aislamiento. Hacer prueba de vacío. Hacer prueba de corto circuito o rotor bloqueado. Hacer la prueba con carga o prueba al freno
16

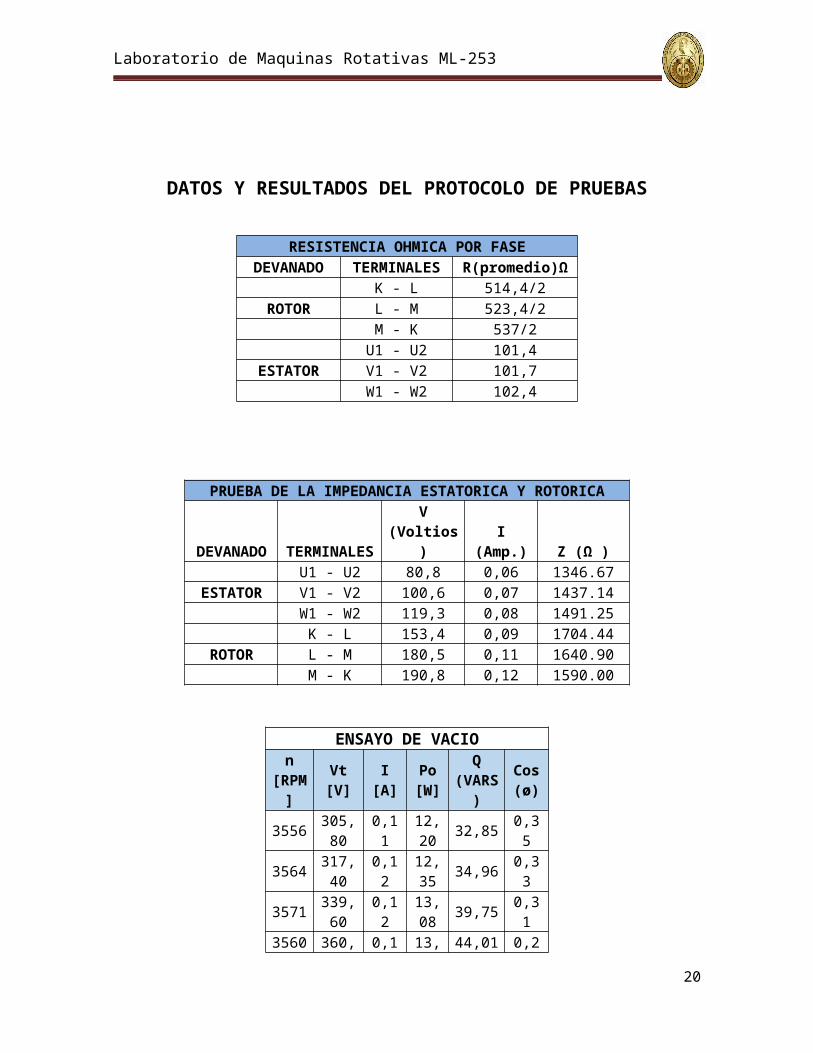
DATOS Y RESULTADOS DEL PROTOCOLO DE PRUEBAS
ENSAYO DE VACIOn
[RPM]
Vt [V]
I [A]Po [W]
Q (VARS
)
Cos (ø)
3556305,8
00,11
12,20
32,85 0,35
3564317,4
00,12
12,35
34,96 0,33
3571339,6
00,12
13,08
39,75 0,31
3560360,9
00,13
13,14
44,01 0,29
3565382,2
00,13
14,23
49,02 0,28
3568399,3
00,14
14,28
53,36 0,26
17
RESISTENCIA OHMICA POR FASE
DEVANADO TERMINALES R(promedio)Ω
K - L 514,4/2
ROTOR L - M 523,4/2
M - K 537/2
U1 - U2 101,4
ESTATOR V1 - V2 101,7
W1 - W2 102,4
PRUEBA DE LA IMPEDANCIA ESTATORICA Y ROTORICADEVANAD
OTERMINALE
S V (Voltios) I (Amp.) Z (Ω )U1 - U2 80,8 0,06 1346.67
ESTATOR V1 - V2 100,6 0,07 1437.14W1 - W2 119,3 0,08 1491.25
K - L 153,4 0,09 1704.44ROTOR L - M 180,5 0,11 1640.90
M - K 190,8 0,12 1590.00
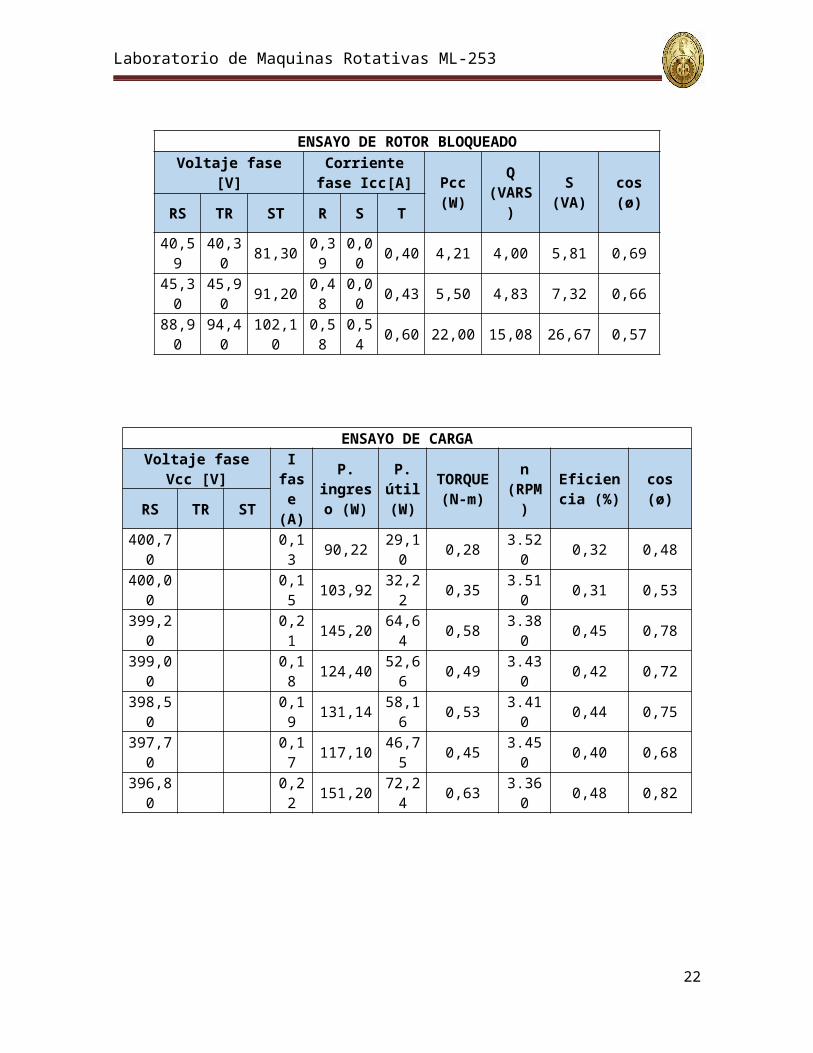
ENSAYO DE ROTOR BLOQUEADO
Voltaje fase [V]Corriente fase
Icc[A] Pcc (W)
Q (VARS
)S (VA) cos (ø)
RS TR ST R S T
40,59 40,30 81,300,39
0,00
0,40 4,21 4,00 5,81 0,69
45,30 45,90 91,200,48
0,00
0,43 5,50 4,83 7,32 0,66
88,90 94,40 102,100,58
0,54
0,60 22,00 15,08 26,67 0,57
ENSAYO DE CARGAVoltaje fase Vcc [V] I
fase (A)
P. ingreso
(W)
P. útil (W)
TORQUE (N-m)
n (RPM)
Eficiencia (%)
cos (ø)RS TR ST
400,70 0,13 90,22 29,10 0,28 3.520 0,32 0,48400,00 0,15 103,92 32,22 0,35 3.510 0,31 0,53399,20 0,21 145,20 64,64 0,58 3.380 0,45 0,78399,00 0,18 124,40 52,66 0,49 3.430 0,42 0,72398,50 0,19 131,14 58,16 0,53 3.410 0,44 0,75397,70 0,17 117,10 46,75 0,45 3.450 0,40 0,68396,80 0,22 151,20 72,24 0,63 3.360 0,48 0,82
18
CUESTIONARIO
1. Enumere y defina las características nominales de las máquinas rotativas de inducción rotor bobinado. Además tome las características de placa del motor utilizados en su experiencia.
Es un motor que tiene estator igual al de jaula de ardilla y el rotor viene bobinado en estrella cuyos terminales van conectados a tres (3) anillos colectores rozantes fijados en el eje del motor. Los anillos colectores se conectan a un control de velocidad conformado por resistencias rotatorias y hace el oficio de arrancador. La puesta en marcha se hace en 2,3,5 tiempos, según el caso por eliminación de las resistencias intercaladas en el circuito del rotor .
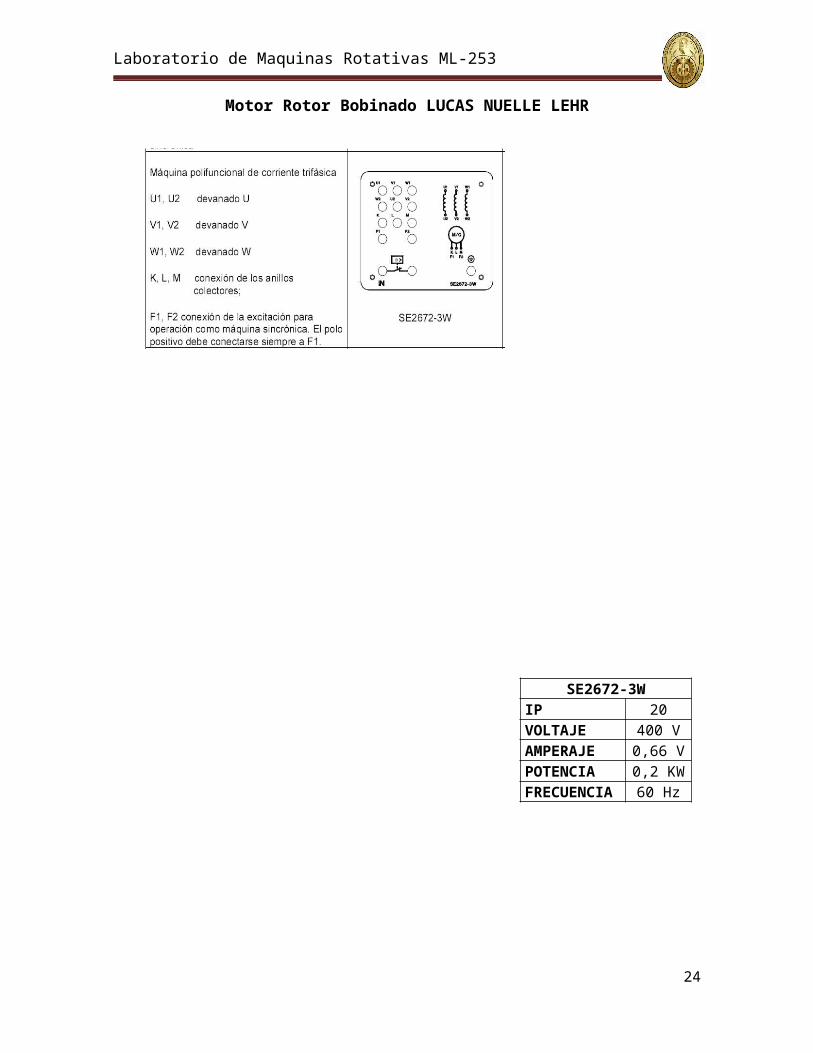
Motor Rotor Bobinado LUCAS NUELLE LEHR
19
SE2672-3WIP 20VOLTAJE 400 VAMPERAJE 0,66 VPOTENCIA 0,2 KWFRECUENCIA 60 Hz
2. Cómo se invierte el sentido de giro de éste motor asíncrono y cuantas posibilidades tengo de hacerlo. Haga las conexiones que Ud. ha realizado.
Para invertir el sentido de giro de un motor asíncrono trifásico, basta con invertir el sentido de giro del campo magnético giratorio, para lo cual hay que intercambiar dos fases cualesquiera entre sí, de tal forma que si las corrientes trifásicas equilibradas son de la forma:
Ia= Io·cos (ω1×t ) se introduce por el devanado a
Ib= Io·cos (ω1×t-2π
3) se introduce por el devanado c
Ic= Io·cos (ω1×t+2π
3); se introduce por el devanado b
Estas corrientes generan los siguientes campos magnéticos:
Ia ⇒ Ba= K· ia·cos (θ)
Ib ⇒ Bb= K· ib·cos (θ + 2·π/3)
Ic ⇒ Bc= K· ic·cos (θ - 2·π/3)
El campo magnético resultante es:
Btotal= Ba + Bb + Bc = (3/2)· K·I0· Cos (p·θ + ω1·t),
Que es un campo giratorio de amplitud constante, (3/2)·K·I0 , y de velocidad de giro, alrededor del rotor, también constante y de valor, pero en sentido contrario al anterior caso:
20

3. Realice todos los cálculos necesarios que le conduzca a construir el diagrama equivalente monofásico valorado, referido al estator con sus valores registrados y calculados en los ensayos de vuestros laboratorios.
Con los valores promedio del ENSAYO A VACIO y asumiendo valores de las pérdidas obtenemos:
Rp (Ω) 5241,92Xm (Ω) 1602,45
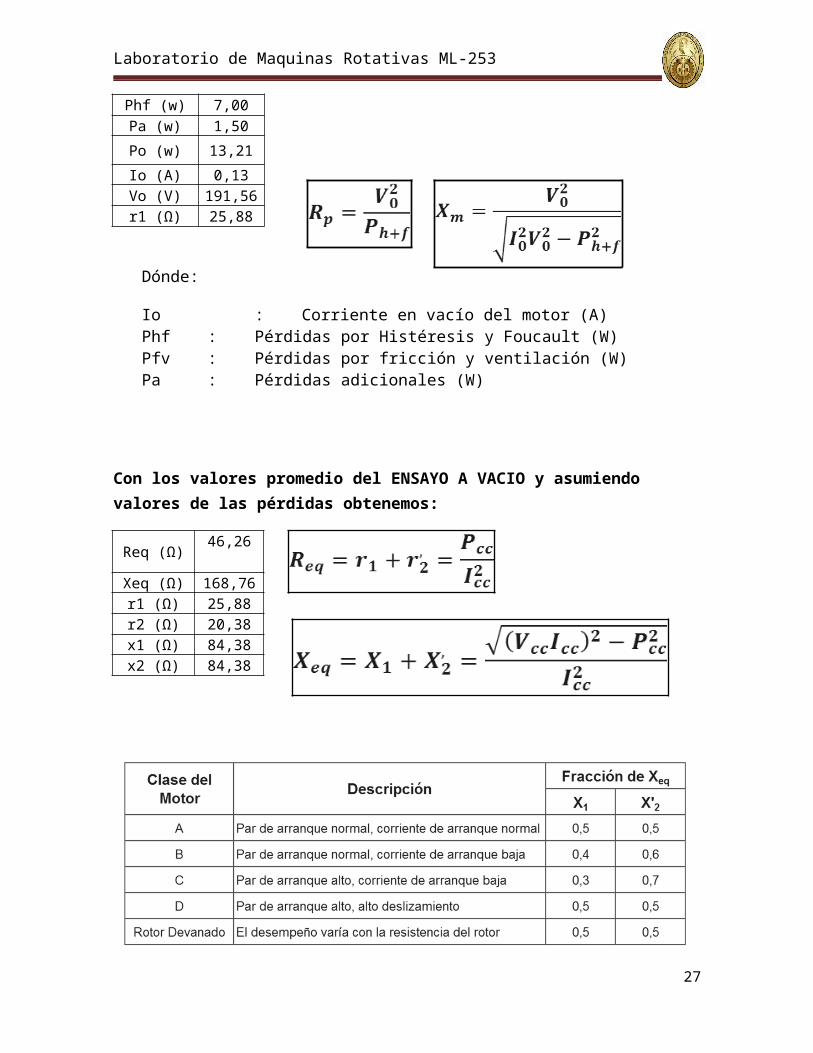
Pfv (w) 3,50
Phf (w) 7,00
Pa (w) 1,50
Po (w) 13,21
Io (A) 0,13
Vo (V) 191,56r1 (Ω) 25,88
Dónde:
Io : Corriente en vacío del motor (A)Phf : Pérdidas por Histéresis y Foucault (W)Pfv : Pérdidas por fricción y ventilación (W)Pa : Pérdidas adicionales (W)
21
Con los valores promedio del ENSAYO A VACIO y asumiendo valores de las pérdidas obtenemos:
Req (Ω)46,26
Xeq (Ω) 168,76r1 (Ω) 25,88r2 (Ω) 20,38
x1 (Ω) 84,38x2 (Ω) 84,38
22

4. Graficar VLINEA vs I1, PNUCLEO vs I1.
0.11 0.12 0.12 0.13 0.13 0.140.00
50.00
100.00
150.00
200.00
250.00
300.00
350.00
400.00
450.00
Vlinea Vs. Ilinea
Vlinea Vs. Ilinea
No se grafico I1, PNUCLEO vs I1 para efectos de calcular los parámetros del circuito equivalente se asumió este valor promedio.
5. Determinar las pérdidas rotacionales en el motor probado.
Se asumieron estos valores para efecto de cálculos:
Phf : Pérdidas por Histéresis y Foucault (W)Pfv : Pérdidas por fricción y ventilación (W)Pa : Pérdidas adicionales (W)
23
6. Graficar las curvas T, EF y FP vs velocidad.
3,520 3,510 3,380 3,430 3,410 3,450 3,3600.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
TORQUE
TORQUE
n (RPM)
TORQ
UE (N
-m)
3,520 3,510 3,380 3,430 3,410 3,450 3,3600.00
10.00
20.00
30.00
40.00
50.00
60.00
EFICIENCIA
ECICIENCIA
n (RPM)
n (%
)
24
3,520 3,510 3,380 3,430 3,410 3,450 3,3600.000.100.200.300.400.500.600.700.800.90
FDP
FDP
n (RPM)
FDP
7. Elabore un formato del protocolo de pruebas que Ud. realizaría en las máquinas eléctricas tipo rotor bobinado.
TABLA N° 3.- PRUEBA DE VACIO
V FASE
( VOLTIOS )
I FASE
( AMPERIOS )
P
( VATIOS )
TORQUE
N - m
Q
(VARs)
VELOCID.
RPM
COS
25
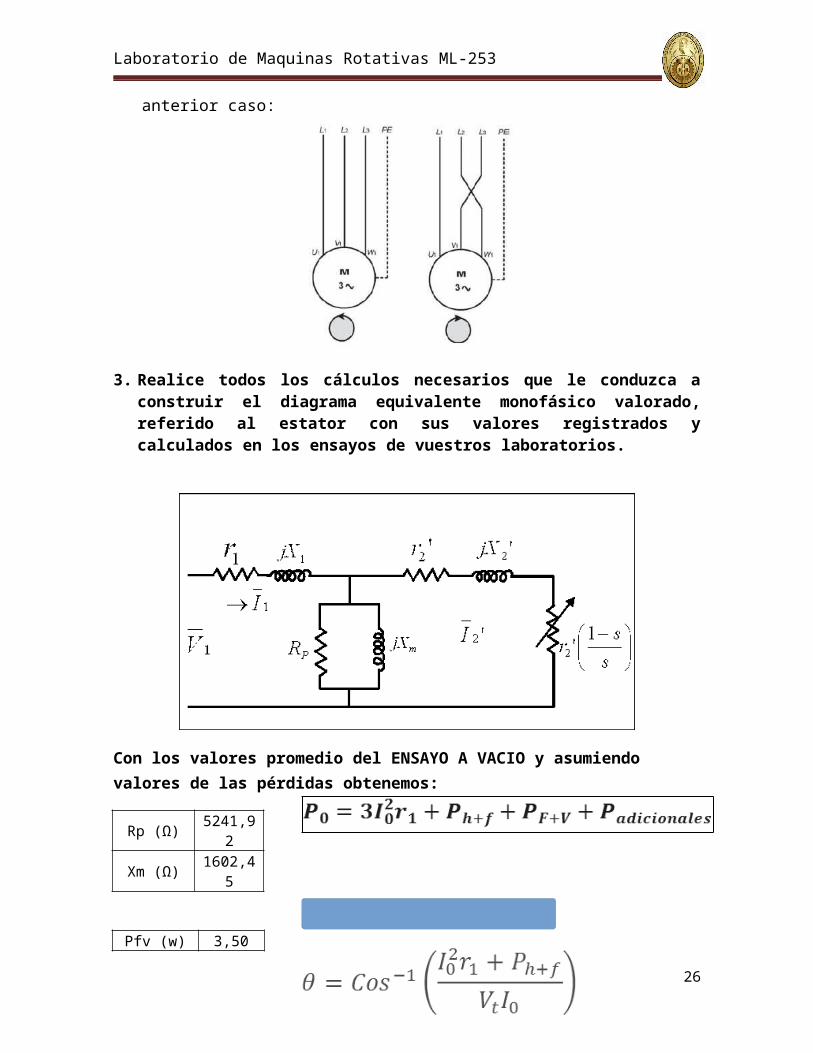
TABLA N° 2.- PRUEBA DE CORTO CIRCUITO ( ROTOR BLOQUEADO )
V FASE
( VOLTIOS )I FASE ( AMPERIOS ) P Q S COS
RS RT ST R S T VATIOS VARS VOLT-AMP.
TABLA N° 5.- PRUEBA CON CARGA ( PRUEBA AL FRENO )
VRS
VOL
VST
VOL
VRT
VOL
IR
A
P INGR.
VATIOS
P UTIL
VATIOS
TORQUE
N-m
VELOC
RPM
EF
(%)
COS
26
CONCLUSIONES
1. Se observa en las gráficas en las curvas deficiencia de puntos, se puede concluir que efectivamente, se cumple en gran medida las curvas obtenidas experimentalmente con las teóricas
2. Las eficiencia (%) calculadas son relativamente menores a los estándares conocidos de los motores eléctricos.
3. Se ve en la necesidad de contar con un motor de mayor capacidad en cuanto a amperaje, de manera que se pueda obtener más puntos y así obtener una mejor gráfica
27

BIBLIOGRAFIA
Maquinas Eléctricas Chapman 5ta Edición.
Apuntes de clases de Maquinas Eléctricas Rotativas.
es.wikipedia.org
Informes Pasados de Laboratorios.
monografias.com.
28