Embed Size (px)
Citation preview

MISIONES ESPACIALES México 2017
Critical Design Review (CDR)
IPN CANUCK
1

ÍNDICE 1. Portada………………………………………………………………………………………..1
2. Índice………………………………………………………………………………………….2
4. Requerimientos de la misión ……………………………………………………………….3
5.Diagrama de flujo de la misión …………………………………………………………..….4
3. Estimación de pesos……………………………………………………………………….. 5-7
5. Bases para modelo teórico para proceso de diseño……………………………………..8-24 5.1 Innovación………………….………………………………………………………22-23
6. Proporción del propelente…………………………………………………………………..25-28
7. Cálculo explícito para cumplir con los requerimientos de la misión………………........29-54
8. Diseño basado en el modelo y cálculos realizados……………………………………...55-61
9. Sistema de recuperación……………………………………………………………….......62-68 9.1 bonus………………………………………………………………………………69-72
8. Planos del diseño…………………………………………………………………………….73-78
9. Costos………………………………………………………………………………………....79-84 2

Requerimientos de la misión Requerimientos ingenieriles
Variable Medida mínima Medida requerida Medida Máxima
Altura de vuelo [m] 20 60 +/- 5 100
Presión del tanque [psi] Libre Libre 110
Costo [MXN] Libre Libre 4000 *
Volumen total del tanque Libre Libre Libre
Cohete
Masa total del cohete [g] Libre Libre Libre
Volumen total del cohete Libre Libre Libre
Carga Útil
Masa de carga útil [g] 400 400 400
Volumen para carga útilAEM (Forma cilíndrica)
Altura: 15cmDiámetro: 8cm
Altura: 15cmDiámetro: 8cm
Altura: 15cmDiámetro: 8cm
Masa de carga útil extra** Libre Libre Libre3

Diagrama de flujo
4

Estimación de Masa
Estructura
Componente Masa (g) Fuente
Tanque (botella) 80 +/- 5 Estimación
Nariz (PET ) 20 +/- 5 Estimación
Fuselaje (PET) 35 +/- 5 Estimación
Sistema de liberación (Servo 9g, bisagra) 25 +/- 5 Estimación
Aletas (4) 50 +/- 10 Estimación
Alambre de acero 40 +/- 5 Estimacion
Total 250 +/- 30
5

Sistema de recuperación y carga útil
Componente Masa (g) Fuente
Carga útil 400 Requisito
Paracaídas 55 +/- 5 Estimación
Arduino nano 5.2 Medido
Cámara 7.3 Medido
BMP180 2 Medido
Batería 44 Medido
Total 517.5 +/- 5
Estimación de Masa
6

Sistema de recuperación y carga útil
Estructura 210 +/- 30
Sistema de recuperación & Payload 517.5 +/- 5
Total 727.5 +/- 25
Estimación de Masa
7

Bases del ModeloTeórico
8

Modelo teórico
Como base de los cálculos descriptivos del cohete se utilizó el Teorema de transporte de Reynolds aplicado en el flujo de cantidad de energía, para flujo estable, incompresible, unidimensional y sin fricción en un volumen de control.
Donde e contiene todos los tipos de energía disponibles en el sistema a diseñar, resultando, bajo las suposiciones previamente mencionadas, en la ecuación de Bernoulli:
Dinámica de fluidos
9

Modelo teórico
A partir de la ecuación de Bernoulli, se obtuvo la velocidad del chorro de salida del agua en el volumen de control:
La ecuación de Bernoulli puede también ser escrita de la siguiente manera:
10

Modelo teórico
La presión del aire dentro del tanque, al ser liberada, ocurre como proceso adiabático y, por lo tanto, isentrópico, ya que el tiempo de expulsión es muy pequeño y una transferencia de calor no despreciable, no es llevada a cabo. Deduciendo así, que a cada instante a partir del lanzamiento, y hasta la completa expansión, la presión del aire será diferente.
Donde k es el exponente adiabático para el aire (k=1.4), Po y Vo son la presión y el volumen del aire dentro del tanque, antes del lanzamiento.Así, sustituyendo en la ecuación encontrada para la velocidad de salida del agua y sabiendo que la velocidad de salida del chorro cambiará en función de la presión del aire, también variable, la siguiente ecuación diferencial fue obtenida:
11

Modelo teórico
Posteriormente, para la estimación del flujo másico en el sistema, fue utilizado nuevamente el Teorema de transporte de Reynolds, esta vez aplicado en el flujo de cantidad de masa:
Donde fue asumido que el flujo de agua es estable e incomprensible. La velocidad del chorro de agua es representada por el vector V.n, que en todo momento es normal a la sección de escape, flujo másico también será diferente en cada instante durante la propulsión, resultando en la siguiente ecuación diferencial:
12

Modelo teórico
Conociendo la ecuación diferencial del flujo másico, es posible aproximar la variación de tiempo utilizando el promedio de la variación del flujo másico y la masa instantánea del sistema de la siguiente manera:
La aceleración del cohete puede ser estimada utilizando la segunda ley de newton y el Teorema de transporte de Reynolds aplicado en el flujo de cantidad de movimiento de un volumen de control. La curva de empuje del motor también fue obtenida mediante este teorema:.
13
Modelo teórico
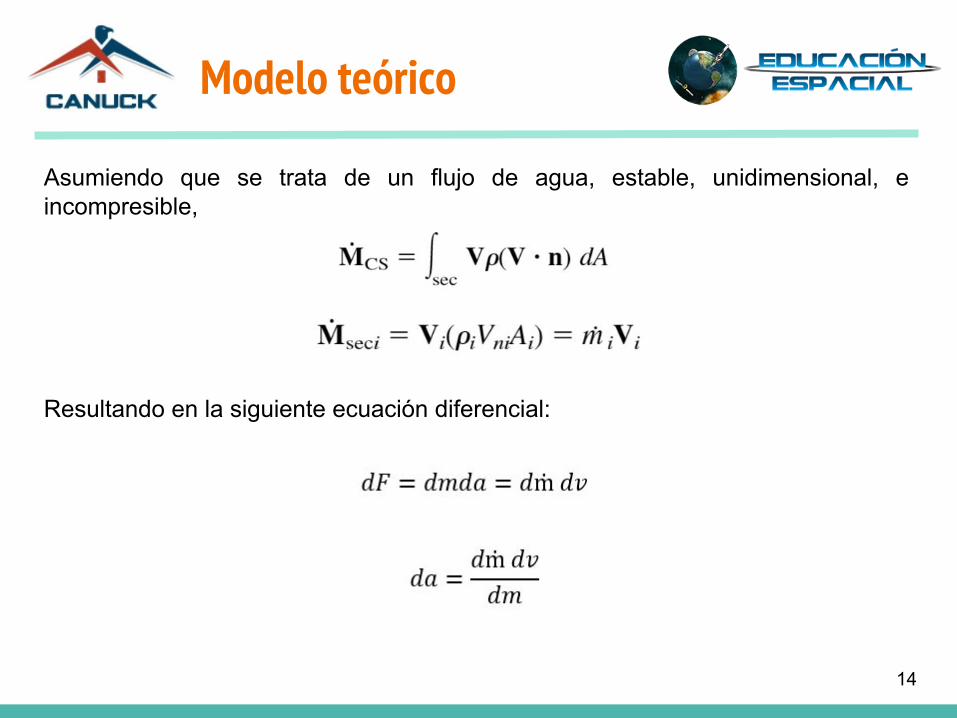
Asumiendo que se trata de un flujo de agua, estable, unidimensional, e incompresible,
Resultando en la siguiente ecuación diferencial:
14
Modelo teórico
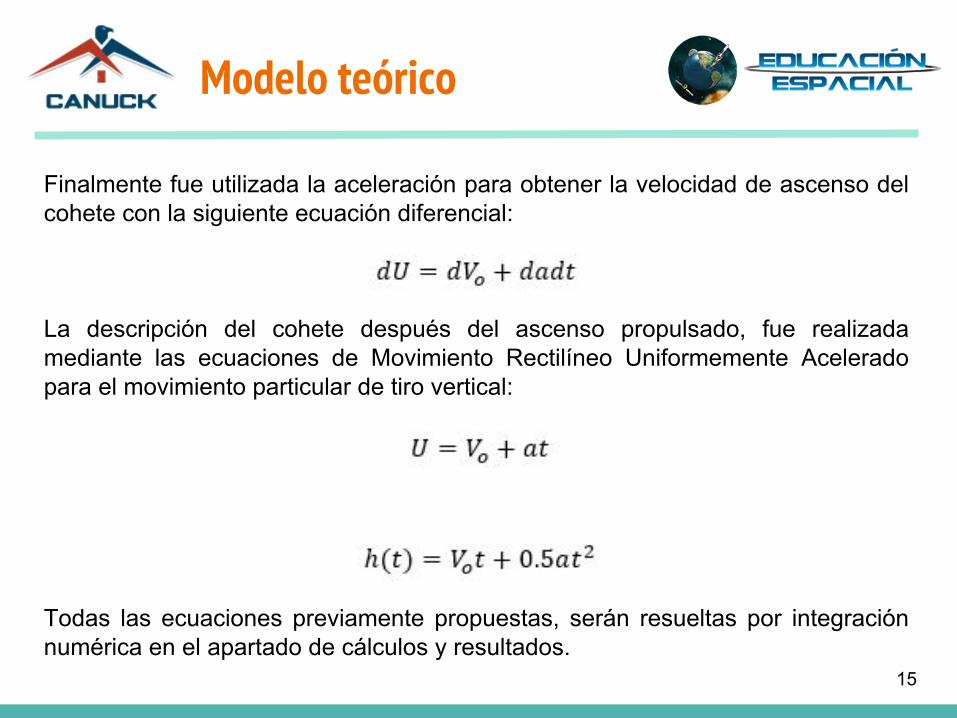
Finalmente fue utilizada la aceleración para obtener la velocidad de ascenso del cohete con la siguiente ecuación diferencial:
La descripción del cohete después del ascenso propulsado, fue realizada mediante las ecuaciones de Movimiento Rectilíneo Uniformemente Acelerado para el movimiento particular de tiro vertical:
Todas las ecuaciones previamente propuestas, serán resueltas por integración numérica en el apartado de cálculos y resultados.
15
Modelo teórico
El propósito de la estabilidad reside en la necesidad de que el modelo vuelva a su posición de equilibrio cuando éste se vea afectado o modificado por una perturbación como las ráfagas de viento.
La estabilidad del cohete es simétrica en todos sus planos. Definimos como plano a las aletas opuestas entre sí, por ello, solo se mostrará el fundamento teórico para un solo plano. Los demás deberían comportarse idénticamente.
Para lograr la estabilidad direccional, un momento restaurador debe ser generado por superficies sustentadoras, que tenderá a regresar al cohete a su posición de equilibrio.
Estabilidad
16

Modelo teórico
Un momento consiste en el producto de una fuerza por la distancia entre el punto de aplicación y el de rotación. La fuerza, en las ecuaciones de estabilidad, es representada por el levantamiento generado por los estabilizadores y su distancia del centro de gravedad del modelo,
Resultando en la siguiente ecuación adimensional:
17

Modelo teórico
18

Modelo teórico
Los siguientes 4 planos de aletas estabilizadoras fueron propuestos:
19

opciones ventajas y desventajas
razones imagen
Cuadrado Fácil construcciónAlto arrastre Estas formas fueron
consideradas porque son las más comunes entre los paracaídas. La forma octogonal es la que proporciona la menor resistencia por lo que se eligió, El círculo no fue considerado debido a la gran cantidad de hilos necesarios para mantener su forma, lo que puede hacer que se enreden
Hexagonal Fácil ConstrucciónMenos arrastrar
Octagonal Fácil ConstrucciónReducción considerable de la resistencia
Modelo teórico
Paracaídas
20

Cuando se ha abierto el paracaídas
El paracaidista está sometido a la acción de su peso y de una fuerza de rozamiento proporcional al cuadrado de la velocidad.ma=-mg+kv2
La constante de proporcionalidad k=ρAδ/2r es la densidad del aire. Aunque la densidad del aire
varía con la altura, en este cálculo aproximado se utilizará su valor al nivel del mar de 1.29 kg/m3.
A es el área de la sección transversal frontal expuesta al aire,
d es un coeficiente que depende de la forma del objeto
Modelo teórico
21

Cuando el paracaidista en caída libre abre el paracaídas, reduce bruscamente su velocidad hasta alcanzar una velocidad límite constante vl, que se obtiene cuando el peso es igual a la fuerza de rozamiento, es decir, cuando la aceleración es cero.
-mg+kv2=0
Como el paracaidista es menos aerodinámico que una esfera, pero más aerodinámico que un disco de frente, tomamos para el coeficiente de forma el promedio de los valores, es decir, d=0.8.
Modelo teórico
22

GENERADOR DE VÓRTICES
Un dispositivo que puede reducir eficazmente la resistencia al avance, sería aquel que crea turbulencias en la capa límite de modo que el flujo presente más energía.
En la separación del flujo, el arrastre de presión es el responsable de la mayoría de la fuerza de arrastre. A fin de reducir el arrastre del objeto, la región de la estela detrás del mismo debe reducirse.
Los generadores de vórtices son rampas o cuñas que se colocan justo en la zona anterior al punto de separación de la capa límite.
23

Tipos de VG
Rectangular
El generador de vórtices rectangular es simplemente una placa plana en la cual la zona perpendicular es también una placa plana de mayor superficie en la cual se monta.
Delta
El siguiente tipo de generador de vórtices son los llamados delta. Este tipo de generador provoca que se pueda extender la capa límite sin crear demasiado arrastre ya que carece de mucha superficie.
24

Proporción del propelente.
25

Condiciones iniciales
Por medio de la variación de los datos característicos del cohete, y condiciones atmosféricas, se obtuvieron las gráficas mostradas en las siguientes diapositivas.
26

Proporción de propelente
La optimización en el porcentaje de propelente se determinó a partir de la velocidad máxima alcanzada**.
Siendo omitidas las cantidades superiores al 60% debido al estancamiento de agua que ocurre en la botella, invalidando completamente el modelo teórico deducido.
**Datos obtenidos a 70 PSI
27

Proporción de propelente
Derivando el polinomio de aproximación de la curva, se obtuvo como valor óptimo, el 45.89% de cantidad de propelente dentro del tanque. 28

Cálculo explícito
29

Cálculos
Todas las ecuaciones diferenciales previamente obtenidas, fueron resueltas mediante integración numérica, utilizando como herramienta, una hoja de cálculo de excel.La integración numérica nos permite conocer el estado del cohete en cada intervalo de tiempo, y permite visualizar de una mejor manera la información obtenida.
Sumario de ecuaciones:
Dinámica de fluidos
30

Condiciones iniciales
Por medio de la variación de los datos característicos del cohete, y condiciones atmosféricas, se obtuvieron las gráficas mostradas en las siguientes diapositivas.
31

Integración de ecuaciones
Las ecuaciones diferenciales de presión y velocidad de salida del chorro de agua fueron resueltas en la presente tabla, diferenciando el volumen relativo de aire durante la expansión adiabática y la altura del fluido, aunque su contribución es muy pequeña.
32

Integración de ecuaciones
Curva de presión característica de un proceso adiabático.33

Integración de ecuaciones
34

Integración de ecuaciones
A partir de las fórmulas mostradas, se obtuvo el flujo másico y la cantidad de agua presente en el sistema a cada instante, con lo que se estimaron los diferenciales de tiempo.
A partir de estos resultados, se observa que el tiempo de propulsión no va más allá de 0.2 segundos, lo que confirma la correcta suposición de un proceso adiabático. 35

Integración de ecuaciones
El teorema de transporte de Reynolds y la Segunda ley de Newton nos permitieron obtener la aceleración y velocidad del modelo en cada instante de propulsión.
La curva de empuje del motor también fue obtenida por medio del Teorema de transporte de reynolds aplicado en el flujo de cantidad de movimiento, mostrada a continuación:
36

Desempeño
El comportamiento característico de la aceleración se debe a la disminución de la masa del sistema.
37

Desempeño
38

Bajo las condiciones iniciales tanto atmosféricas como del cohete, cantidad de agua y presión del tanque, se logró un ascenso de 33 m durante la propulsión.
Desempeño
39

Integración de ecuaciones
Se analizó el modelo después de la propulsión, que fue considerado como movimiento de tiro vertical, logrando un ascenso libre de 33 metros.
El análisis durante y después de la propulsión, fue combinado para visualizar el comportamiento del cohete durante el tiempo total de la misión.
40

Desempeño
41

Desempeño
42

Cálculos
El análisis de estabilidad fue realizado para los 4 tipos de aletas propuestas, tomando en cuenta únicamente la contribución de momento de las mismas. La ecuación utilizada fue deducida en el apartado de modelo teórico, nuevamente presentada:
Los siguientes datos son propios de cada par de aletas. Fue decidido que la distancia utilizada entre el centro de gravedad y la fuerza aerodinámica sería la que está presente después de la propulsión, ya que el tiempo de expulsión del agua es muy corto y sus efectos en el cambio direccional son despreciables.
Estabilidad
43

Perfil aerodinámico
Se decidió utilizar el perfil simétrico NACA 0008 para las aletas estabilizadoras, debido al flujo laminar que genera al paso del aire y al extremadamente bajo arrastre que produce.
44

Cálculos
AerodinámicaEl perfil aerodinámico fue analizado en XFLR5 para obtener sus características aerodinámicas de flujo bidimensional para alas infinitas, en un rango del número de Reynolds desde 20 000 a 90 000 debido a la pequeña cuerda de cada plano de aletas
45

Cálculos
Las siguientes gráficas polares fueron obtenidas:
Polar de coeficiente de levantamiento contra coeficiente de arrastre 46

Cálculos
Polar de coeficiente de levantamiento contra ángulo de ataque
47

Cálculos
Polar de coeficiente de momento contra ángulo de ataque
48

Curvas de levantamiento
Las curvas de levantamiento para cada plano de aletas fue obtenido mediante el Método Vortex Lattice, siendo analizadas como alas finitas, a continuación mostradas:
49

Curvas de levantamiento
50

Curvas de levantamiento
51

Curvas de levantamiento
52

Considerando la distribución de coeficientes de levantamiento a lo largo de la envergadura de las aletas seleccionadas, se calcularon las dimensiones exactas de la sección transversal, para una deflexión máxima de 3% relativa a la longitud de la aleta.A partir de los valores de distribución, se analizó como una viga en voladizo con carga distribuida.
Diseño estructural
53

El material considerado para este diseño estructural fue acero.
Basado en factores de seguridad, se consideró una deflexión máxima de 3% en longitud, lo que nos permite conocer el valor del momento de inercia necesario para la sección transversal.
Considerando una sección transversal circular, se obtuvieron las dimensiones mostradas.
Diseño estructural
54

Diseño basado en el modelo y cálculos
realizados.
55
Análisis de estabilidad
Los datos recaudados en nuestros cálculos no pueden culminar sin una estabilidad adecuada por lo cual tiene un prioridad.
Para la estabilidad del cohete la mejor elección fueron el tipo de aletas número #4 el cual nos muestran un mejor desempeño, junto con el perfil seleccionado; a continuación se realizan los cálculos de estabilidad obteniendo el mejor performance.
56

Análisis de estabilidad
Obteniendo los polinomios de aproximación de cada curva y derivando, fue obtenida la pendiente de levantamiento dCL/da de cada plano estabilizador, que fueron comparadas para decidir cuál generaría un mayor momento restaurador, ya que es lo que se desea en el modelo.
Determinando así que las Aletas 4, al tener una pendiente muy superior a las demás dCL/da= 0.0712, sería el conjunto ideal para estabilizar el modelo.
57

Análisis de estabilidadEl alto valor de la pendiente de levantamiento se debe a que el plano 4 presenta un alargamiento de 4.9, mayor al del resto de planos, la teoría de alas finitas, sugiere un flujo tridimensional del aire sobre las superficies, y que mientras mayor sea el alargamiento de un ala, más cortas serán sus cuerdas de punta, produciendo vórtices de punta de baja magnitud, y consiguientemente, un valor muy bajo de arrastre inducido. La imagen presente, muestra prácticamente la baja magnitud de vórtices de punta, y una superficie con baja presión aerodinámica
58

Análisis de estabilidad
La estimación de los centros de gravedad y el de presión se realizó mediante el software de uso libre OpenRocket, siendo necesario para este análisis, únicamente el de gravedad. Sin embargo, la teoría fundamental de la estabilidad de cohetes, sugiere que para lograr la estabilidad, el centro de gravedad debe estar por arriba del de presión, a lo largo del eje vertical, lo cual es corroborado por el software.
59

Análisis de estabilidad
Finalmente se obtuvieron los valores del coeficiente de momento a diferentes ángulos de ataque que podrían ser generados por perturbaciones de tipo ambiental como ráfagas de viento.
60

Análisis de estabilidad
La pendiente positiva de la gráfica, muestra el comportamiento que tendrá el cohete al modificar su ángulo de ataque. Por ejemplo, si alcanzara un ángulo de -5°, las aletas estabilizadoras generarían un momento negativo, en dirección de las manecillas del reloj, restaurando el ángulo de equilibrio, que es igual a 0°, donde el momento es nulo.
61

Sistema de recuperación
62

Para obtener el área de nuestro paracaídas se consideró una velocidad de 3m/s con una densidad de ρ=0.987kg/m^3, la masa total m=1.455kgy la gravedad g=9.81m/s^2.
k=ρAd/2……….(1) -mg+kv2=0…..……(2)
Sustituimos k de la ecuación 1 en la ecuación 2.
-mg+(ρAd/2)v2=0……..(3)
Despejamos el área de la ecuación 3
A=(m*g*2)/(v^2*ρ*d)como resultado se obtuvo
A=4.017m^2
Paracaídas
63

Para tener las medidas de nuestro paracaídas necesitamos conocer el apotema y la longitud de sus lados para ello tenemos las siguientes ecuaciones.
iniciamos despejando L de la ecuación de área y como resultado.
L= .9121m
Para obtener el apotema solo aplicamos la fórmula.
ap=1.101m
Paracaídas
64

Software
El software del sistema de recuperación se diseñó con base en el método estadístico de regresión lineal. Siendo un modelo matemático usado para aproximar la relación de dependencia entre una variable dependiente Y y las variables independientes Xi.
Dentro de la misión la altitud h actúa como variable dependiente mientras que el tiempo t actúa como variable independiente.
65

Software
Por medio de un sensor de altitud el procesador obtiene los valores dependientes a una frecuencia de 5 Hz.
Con el uso del método de regresión lineal el procesador obtiene el valor de la pendiente cada segundo.
Lo que nos permite distinguir los estados de ascenso y descenso durante la misión
66

Software
Por medio de la evaluación del valor de la pendiente cada segundo, el procesador puede detectar y comparar el estado del cohete para así tomar decisiones de accionamiento del mecanismo de despliegue.
Una vez que el procesador detecta un cambio en la pendiente (ascenso a descenso) nos indica que el cohete alcanzó su apogeo. Lo que nos indica que es el momento adecuado para accionar el mecanismo (servomotor) permitiendo la liberación del paracaídas.
67

Software
Altura máxima a partir de la cual el software detecta una pendiente negativa y activa el mecanismo de liberación.
68

Bonus
Como elemento adicional; se decidió hacer uso de una cámara tipo llavero, la cual podrá ser controlada desde el código programado en el microcontrolador con la ayuda de dos transistores NPN.
Esto con el fin de tener almacenada la trayectoria del cohete durante cada lanzamiento en formato de video.
Dicha información será recuperada al final de los lanzamientos
Razones:
La obtención de video es muy útil en la recopilación de información de la misión.
Este modelo de cámara añade muy poco peso por lo que no afectaría considerablemente el desempeño del cohete.
69

Bonus
Los transistores NPN permiten tener control sobre el encendido, apagado y disparo de la cámara a través de señales lógicas mandadas desde el microcontrolador en base al código programado
La señal lógica excita la base del transistor, lo que permite el paso de la corriente entre el colector y emisor, los cuales actúan como interruptor de encendido/apagado e interruptor de disparo
70

Circuito de carga útil
71

Circuito de carga útil
*Dimensionado de PCB utilizada en el circuito del sistema de recuperación
72

Planos del diseño.
73

Planos del diseño
74

Base de lanzamiento
La base fue diseñada pensando en dos características principales: el acoplamiento de la botella con el tubo de inyección de aire (se ha buscado que la boquilla de la botella entra lo más ajustado posible para que no exista una fuga de aire por esta parte), así como un sistema de liberación de aire, por si surge una emergencia y se tiene que abortar la misión de lanzamiento.
A continuación se muestra el diseño de la base de lanzamiento, así como el dimensionado de la misma.
75

Base de lanzamiento
Llave para la liberacion de presion.
Válvula de llanta para la inyección de aire.
Tubería para la distribución de aire a lo largo de la base.
Conexiones tipo T y L para la unión de la tubería.
76

Base de lanzamiento
Dimensiones de la base de lanzamiento
77

Base de lanzamiento
CAD de la base de lanzamiento completo.
Distribuidor de aire al tanque del cohete, así
como también pilar para su lanzamiento.
78
Costos.
79

Estimación de Costos (Cohete)
Componente Material Obtención Precio (MXN)
Tanque - PET Reciclado 20
Fuselaje y nariz PET Reciclado 20
Aletas (4) Madera Balsa Compra 200
Alambre de 2mm acero compra 20
Generadores de vórtices
Madera Balsa Compra 50
Total 310
80

Estimación de Costos (Sistema de Recuperación)
Componente Material Obtención Precio (MXN)
Paracaídas - Nylon Compra 120
Bisagra Acero Compra 5
Bateria de 9 V ------ Compra 50
Servo 9g- ------ Compra 40
BMP180 Donación 90
Arduino nano ------ Donación 85
Regulador 7805 ------ Compra 10
Total 400
81

Estimación de Costos (Base de lanzamiento)
Componente Material Obtención Precio (MXN)
Tubo PVC Reciclado 70
Válvula de llanta ----- Comprado 35
Pegamento de PVC ----- Compra 35
Empaques (5) Hule Compra 10 (2 C/U)
Codos (5) PVC Compra 40 (8 C/U)
Tapones (3) PVC Compra 15 (5 C/U)
Llave PVC Compra 20
Cintillos de plástico 16 Plástico Compra 16 (1 C/U)
Total 241
82

Estimación de Costos (Bonus)
Componente Material Obtención Precio (MXN)
Cámara - Compra 150
Transistor 2N2222 (2)
- Compra 10
Total 160
83

Estimación de Costos (Total)
Componente Precio (MXN)
Cohete 310
Sistema de recuperación 400
Base de lanzamiento 241
Bonus 160
Total 1111
84