Embed Size (px)
Citation preview

ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ ТА АВТОМАТИЗАЦІЯ. ЕЛЕКТРИЧНІ МАШИНИ І АПАРАТИ. ЕНЕРГЕТИКА
Вісник КрНУ імені Михайла Остроградського. Випуск 1/2013 (78). 11
УДК 621.31.83.52
АНАЛИЗ СИСТЕМ ВЕКТОРНОГО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯМИ ПЕРЕМЕННОГО ТОКА
Б. И. Фираго Белорусский национальный технический университет просп. Независимости, 65, г. Минск, 220013, Беларусь. E–mail: [email protected] Проанализированы существующие системы векторного управления электродвигателями переменного тока с
выявлением характерных признаков классификации и оценкой свойств, а также приведены математические мо-дели и структурные схемы векторного управления асинхронным двигателем (АД) с ориентированием оси х сис-темы координат х–у вдоль вектора потокосцепления ротора, взаимоиндукции и статора. Показано, что наиболее простые соотношения получаются при ориентировании оси х системы координат х–у вдоль вектора потокосце-пления ротора. Представленные в работе математические модели и структурные схемы асинхронного двигателя позволяют понять сущность векторного управления и могут быть использованы при составлении функциональ-ных схем соответствующего вида векторного управления.
Ключевые слова: векторное управление, асинхронный двигатель, потокосцепление, координатные оси.
АНАЛІЗ СИСТЕМ ВЕКТОРНОГО КЕРУВАННЯ ЕЛЕКТРОДВИГУНАМИ ЗМІННОГО СТРУМУ
Б. І. Фіраго Білоруський національний технічний університет просп. Незалежності, 65, м. Мінськ, 220013, Білорусь. E–mail: [email protected] Проаналізовані існуючі системи векторного керування електродвигунами змінного струму з виявленням ха-
рактерних ознак класифікації і оцінкою властивостей, а також наведені математичні моделі і структурні схеми векторного керування асинхронним двигуном з орієнтацією осі х системи координат х–у уздовж вектора пото-козчеплення ротора, взаємоіндукції і статора. Показано, що найбільш прості співвідношення отримуємо при орієнтації сі х системи координат х–у вздовж вектора потокозчеплення ротора. Наведені в роботі математичні моделі і структурні схеми асинхронного двигуна дозволяють зрозуміти сутність векторного керування і можуть бути використані при складанні функціональних схем відповідного виду векторного керування.
Ключевые слова: векторное управление, асинхронный двигатель, потокосцепление, координатные оси.
АКТУАЛЬНІСТЬ РОБОТИ. Из большого разно-образия электродвигателей, применяемых в различ-ных отраслях промышленности, на транспорте, в коммунальном хозяйстве и бытовой технике, преоб-ладающими являются электродвигатели переменно-го тока, главным образом, асинхронные двигатели (АД), которые составляют более 75 % общего числа. Это связано, в первую очередь, с их меньшей стои-мостью и большей надежностью в работе по сравне-нию с электродвигателями постоянного тока [1]. Но электродвигатели постоянного тока независимого возбуждения (ДПТ НВ) обладают хорошей управ-ляемостью. Поэтому уже давно стремились придать электродвигателям переменного тока такую же управляемость, которую имеют ДПТ НВ, сохранив при этом высокие технико-экономические показате-ли двигателей переменного тока. Долгое время это-го не удавалось достичь из-за отсутствия полностью управляемых силовых полупроводниковых преобра-зователей и быстродействующего информационного их обеспечения.
В 70-е годы прошлого столетия Блашке Ф. [2] создал первую систему асинхронного частотного электропривода с векторным управлением, показав пути ее технической реализации.
Частотный асинхронный электропривод с век-торным управлением обладает по управляемости та-кими же свойствами, как и электропривод с ДПТ НВ, который имеет независимые каналы управления магнитным потоком и электромагнитным моментом. В связи с этим, целью всех разрабатываемых систем векторного управления электродвигателями пере-
менного тока стало создание условий, подобных ус-ловиям, существующим в ДПТ НВ:
1) перпендикулярное расположение векторов, формирующих электромагнитный момент;
2) возможность независимого регулирования магнитного потока и электромагнитного момента.
Хотя АД имеет преимущество перед ДПТ НВ в отношении размеров, КПД, максимальной скорости, надежности, стоимости и т.д., его нелинейная дина-мическая модель требует более сложных систем управления по сравнению с ДПТ НВ. Общая дина-мическая модель АД может быть представлена уравнением 6-го порядка. Более того, стоимость преобразователя частоты (ПЧ) для регулирования скорости АД в 3–5 раз превышает стоимость самого двигателя [1]. Однако в настоящее время проявляет-ся тенденция в снижении этой стоимости, в связи с этим расширяется область применения векторного управления АД в регулируемых электроприводах с высокими требованиями к диапазону регулирования скорости и динамическим показателям.
Имеется большое число литературных источни-ков по векторному управлению электродвигателями переменного тока, рассматривающих теоретические или технические аспекты векторного управления. Однако число видов векторного управления уже превышает 20 [3], и возникают проблемы в иденти-фикации вида векторного управления, что влияет на понимание сущности конкретного векторного управления, его возможностей применения и даль-нейшего совершенствования. К сожалению, обоб-щающие публикации по этому вопросу очень редки.

ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ ТА АВТОМАТИЗАЦІЯ. ЕЛЕКТРИЧНІ МАШИНИ І АПАРАТИ. ЕНЕРГЕТИКА
Вісник КрНУ імені Михайла Остроградського. Випуск 1/2013 (78). 12
Цель работы состоит в кратком анализе сущест-вующих видов векторного управления с выявлени-ем характерных признаков, которые могут быть по-ложены в основу классификации систем векторного управления.
МАТЕРИАЛ И РЕЗУЛЬТАТЫ ИССЛЕДОВА-НИЙ. Виды векторного управления АД. Чтобы иметь возможность независимого регулирования магнит-ного потока и электромагнитного момента АД, не-обходимо вводить компенсирующие напряжения в систему ПЧ–АД, а также осуществлять прямые и обратные координатные и фазные преобразования переменных [1, 3, 4].
Для формирования систем векторного управле-ния АД используют следующие векторы потокосце-пления: ротора, взаимоиндукции и статора. В ре-зультате такого подхода можно получить три вида векторного управления. Указанные векторы пото-косцеплений можно определить непосредственно или косвенно. В связи с этим различают прямое и косвенное векторное управление АД. При прямом векторном управлении АД вектор потокосцепления измеряют или, чаще всего, вычисляют по величине, а также определяют его угловое положение.
Вычисление величины вектора потокосцепления и его положения осуществляется по моделям маг-нитного потока. С целью повышения точности вы-числений обычно в модели вводят обратные связи, и тогда эти модели преобразуются в наблюдатели.
Прямое векторное управление может быть реа-лизовано с машинным датчиком скорости двигателя или без него, т.е. с косвенным определением скоро-сти двигателя по модели.
Таким образом, можно различать: 1) прямое векторное управление с датчиком по-
токосцепления и с датчиком скорости; 2) прямое векторное управление с вычислителем
потокосцепления и датчиком скорости; 3) прямое бездатчиковое векторное управление,
когда потокосцепление и скорость вычисляются. При косвенном векторном управлении применя-
ется математическая модель АД, на основе которой выявляются внутренние связи, используемые затем в управлении.
Различают косвенное векторное управление с машинным датчиком скорости и без него. Каждое из указанных видов векторного управления может от-личаться применением различных векторов пото-косцеплений: статора, взаимоиндукции и ротора.
Следовательно, на основании изложенного мож-но насчитать 15 видов векторного управления АД. Как указывает профессор Питер Вас, в настоящее время насчитывается более 20 видов векторного управления АД [3].
Кроме того, применяется векторное управление синхронными двигателями с электромагнитным возбуждением и постоянными магнитами [4, 5].
Наиболее простым и распространенным является бездатчиковое, косвенное векторное управление АД, но точность его реализации значительно ниже, чем при использовании машинных датчиков, по скоро-сти точность примерно в 100 раз меньшая. Частично погрешность уменьшают за счет введения автома-
тической подстройки параметров. Тем не менее, со-временные бездатчиковые системы векторного управления АД не позволяют управлять моментом двигателя при нулевой скорости, а такое управление при нулевой скорости требуется в электроприводах грузоподъемных механизмов.
И еще одна особенность косвенного векторного управления состоит в том, что мощность АД и ПЧ не должны отличаться более, чем в три раза.
В широком понимании к векторному управле-нию можно отнести прямое управление электромаг-нитным моментом АД, которое делится на класси-ческую и модернизированную систему [3, 4, 6]. Из-за существенных недостатков (шумы, вибрации, ко-лебания скорости в установившемся режиме) клас-сическая система прямого управления моментом АД имеет ограниченное применение [4, 6].
Более распространенной сейчас является модер-низированная система прямого управления момен-том, когда в переходном процессе используют клас-сическую систему (релейные регуляторы и таблицу выбора включений транзисторов инвертора), а в ус-тановившемся режиме применяют векторное управ-ление (линейные регуляторы) с формированием век-тора напряжения посредством пространственной векторной широтно-импульсной модуляции.
Математические модели и структурные схемы, применяемые в системах векторного управления АД. Математические модели и построенные на их основе структурные схемы показывают взаимосвязь переменных и формирование электромагнитного момента двигателя для выбранного вектора пото-косцепления.
В системах векторного управления АД в каналах задания потокосцепления (ротора, взаимоиндукции, статора) и составляющих вектора тока статора ис-пользуется синхронно-вращающаяся система коор-динат x–y, где все электрические и магнитные вели-чины являются сигналами постоянного тока. Поэто-му рассмотрим общую математическую модель эк-вивалентного двухфазного АД в осях x–y [4]:
,iiiiLp23M
,iLiL,iLiL
;iLiL;iLiL
,dt
dRi0
,dt
dRi0
,dt
dRiu
,dt
dRiu
y2x1x2y112п
y112y22y2
x112x22x2
y212y11y1x212x11x1
x2эл1y2
2y2
y2эл1x2
2x2
x11y1
1y1y1
y11x1
1x1x1

ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ ТА АВТОМАТИЗАЦІЯ. ЕЛЕКТРИЧНІ МАШИНИ І АПАРАТИ. ЕНЕРГЕТИКА
Вісник КрНУ імені Михайла Остроградського. Випуск 1/2013 (78). 13
,iiiiLp23M
,iLiL,iLiL
;iLiL;iLiL
,dt
dRi0
,dt
dRi0
,dt
dRiu
,dt
dRiu
y2x1x2y112п
y112y22y2
x112x22x2
y212y11y1x212x11x1
x2эл1y2
2y2
y2эл1x2
2x2
x11y1
1y1y1
y11x1
1x1x1
, (1)
где
,LLL,LLL
2122
1121 , (2)
LL 12 – наибольшее значение взаимной индук-тивности для трехфазной обмотки АД; 1L , 2L – индуктивности рассеяния статора и ротора; 1R , 2R – активные сопротивления фаз обмотки статора и ро-тора (приведенное сопротивление); xu1 , yu1 – на-
пряжения статора АД по осям x–y; xi1 , yi1 – токи
статора АД по осям x–y; x1 , y1 – потокосцепления
статора АД по осям x–y; xi2 , yi2 – приведенные токи
ротора АД по осям x–y; x2 , y2 – потокосцепления
ротора по осям x–y; 11 2 f – угловая частота из-
менения напряжения статора АД; – механическая угловая скорость ротора; пp – число пар полюсов АД; пpэл – электрическая угловая скорость ротора; М – электромагнитный момент эквивалент-ного двухфазного АД; t – время.
Далее рассмотрим математические модели и структурные схемы эквивалентного двухфазного АД при ориентировании оси х системы координат х–у вдоль векторов потокосцеплений: ротора 2 , взаи-моиндукции m , статора 1 . При построении структурных схем к математическим моделям АД добавляем уравнение движения электропривода:
dtdJММ с
, (3)
где сМ – статический момент; J – момент инерции электропривода, приведенный к валу двигателя.
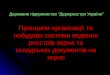
1) Ориентирование оси х вдоль вектора пото-косцепления ротора 2 .
Как следует из векторной диаграммы АД (рис. 1) и математической модели (1), в этом случае:
02 xi ; xx iL 1122 , (4)
011222у2 yу iLiL , (5)
откуда
yy iLLi 1
2
122 . (6)
Рисунок 1 – Векторная диаграмма АД в комплексной плоскости

ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ ТА АВТОМАТИЗАЦІЯ. ЕЛЕКТРИЧНІ МАШИНИ І АПАРАТИ. ЕНЕРГЕТИКА
Вісник КрНУ імені Михайла Остроградського. Випуск 1/2013 (78). 14
В результате уравнения математической модели (1) могут быть преобразованы к виду [4]:
,ikpM
iL
,iLdt
diLRiu
,iLdt
diLRiu
yxr
xx
xxy
yy
yx
xx
12п
1122
21111
1111
1111
1111
23
,
(7)
где
21
2121LL
L , (8)
2
12
LL
kr , (9)
– коэффициент рассеяния; rk – коэффициент магнитной связи ротора.
В уравнениях (7) присутствуют ЭДС вращения:
,iLe,iLe
xxy
yx
21111
1111
(10)
обусловленные вращением системы координат х-у относительно неподвижной системы координат α-β.
Чтобы была возможность независимо задавать токи xi1 и yi1 , которые определяют потокосцепле-ние ротора и электромагнитный момент двигателя, необходимо компенсировать ЭДС вращения хе1 ,
уе1 , вводя компенсирующие напряжения:
xeu 1кx , yкy eu 1 . После этого получаем «развязанные» состав-
ляющие вектора напряжения статора:
,dt
diTiRuuu
,dt
diTiRuuu
yyyyy
xxxxx
1111кy11
1111кx11
(11)
где
1
11 R
LT x
; 1
11 R
LT y
. (12)
С помощью напряжений хu1 и
yu1 можно неза-
висимо задавать «намагничивающую» з1 ,xi и «мо-
ментную» з1 ,yi составляющие вектора 1i тока стато-ра.
Определив з1 ,xi и з1 ,yi через задаваемые в систе-
ме управления величины з,х2 и зМ , возвращаемся к исходным уравнениям статора с ЭДС вращения:
,iLdt
diLRiu
,iLdt
diLRiu
з,х,x,y
,yз,у
,y,x
,xз,х
2з111з1
11з11
з111з1
11з11
(13)
по которым вычисляется амплитуда первой гармо-ники задаваемого фазного выходного напряжения ПЧ:
2з1
2з1з1 ,y,x,m uuU . (14)
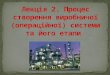
На основании математической модели (7) и уравнения (3) составляем структурную схему экви-валентного двухфазного АД при ориентировании оси х вдоль вектора потокосцепления ротора
2 (рис. 2).
Рисунок 2 – Структурная схема эквивалентного двухфазного АД в осях x–y при ориентировании оси х
вдоль вектора потокосцепления ротора 2

ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ ТА АВТОМАТИЗАЦІЯ. ЕЛЕКТРИЧНІ МАШИНИ І АПАРАТИ. ЕНЕРГЕТИКА
Вісник КрНУ імені Михайла Остроградського. Випуск 1/2013 (78). 15
2) Ориентирование оси х вдоль вектора пото-косцепления взаимоиндукции m .
При таком ориентировании оси х, как следует из векторной диаграммы АД (рис. 1), имеем соотношения:
.,
my
mxm
012 . (15)
Соответственно потокосцепление ротора по осям x-y получает выражение:
.iL
,iL
yy
xmхх
222
222
(16)
Потокосцепление взаимоиндукции mx опреде-ляется намагничивающим током:
,iii xxx 21 (17)
т.е.
.iiL xxmx 2112 (18)
Обратим внимание, что в данном случае xi2 не равен нулю, как это было при ориентировании оси х
вдоль вектора 2 . С учетом соотношений (15) из (1) может быть
получена математическая модель АД:
.pRL
RkRR
,iiLip
,iTdtid
Ti
,iLdt
diLRiu
,iLdt
diLRiu
эл
r
xxmxymx
yx
x
хmxэлy
yy
yx
эxx
пэл1эл
2
2221э1
21121п
12эл2
22
1111
11э11
1111
1111
;
;T;
;23M
(19)
По математической модели (19) и (3) строим струк-турную схему (рис. 3).
Рисунок 3 – Структурная схема эквивалентного двухфазного АД в осях x–y при ориентировании оси х вдоль вектора потокосцепления взаимоиндукции m
3) Ориентирование оси х вдоль вектора пото-
косцепления статора 1 . Такое ориентирование оси х приводит к соотно-
шениям (рис. 1):
,ik
iLLi
,iLiL
ys
yy
yy
yх
1112
12
21211
111
1
0
;0;
, (20)
где 1
12
LL
ks - коэффициент магнитной связи статора
АД. Используя (20) в системе уравнений (1), получим
математическую модель АД в виде:

ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ ТА АВТОМАТИЗАЦІЯ. ЕЛЕКТРИЧНІ МАШИНИ І АПАРАТИ. ЕНЕРГЕТИКА
Вісник КрНУ імені Михайла Остроградського. Випуск 1/2013 (78). 16
.RRa
),LLa(LL;
RLT;
RLT
;RLL
RR
;;ip23M
,dt
diTiL
,iLdt
diLRiu
,T
iLdt
diLRiu
2ээ2
2э2
элэлyxп
xxэx
xэлxэлy
эyy
xyэлx
эxx
2
1
2
12
2
22
1
2
11
111
1121
1111
1211
12
111
12111
(21)
По модели (21) и (3) построена структурная схе-ма (рис. 4). Анализ приведенных математических моделей АД, используемых для векторного управ-ления, показывает, что наиболее простые соотноше-ния для задаваемых величин получаются при ориен-
тировании оси х системы координат х–у вдоль век-тора потокосцепления ротора. Ориентирование оси х вдоль вектора потокосцепления взаимоиндукции и вектора потокосцепления статора осложняет опре-деление задаваемых составляющих вектора тока статора и вектора напряжения.
Поэтому в системах векторного управления АД (как прямых, так и косвенных) преобладает ориен-тирование оси х вдоль вектора потокосцепления ро-тора, хотя вычисление вектора потокосцепления статора или взаимоиндукции проще, чем вычисле-ние вектора потокосцепления ротора. В системах прямого управления электромагнитным моментом АД, которые в широком смысле относятся к вектор-ным, применяется вычисление вектора потокосцеп-ления статора.
Следует заметить, что вычисление угловой ско-рости двигателя при бездатчиковом векторном управлении осуществляется по моделям, где ис-пользуются составляющие вектора потокосцепле-ния, которые участвуют в формировании электро-магнитного момента двигателя.
Рисунок 4 – Структурная схема эквивалентного двухфазного АД в осях x–y при ориентировании оси х вдоль вектора потокосцепления статора 1
ВЫВОДЫ. 1. Приведенный анализ показал
большое разнообразие векторных систем управле-ния с выявлением их основных свойств.
2. Представленные математические модели и структурные схемы АД позволяют уяснить сущ-ность векторного управления и могут быть исполь-зованы при составлении функциональных схем со-
ответствующего вида векторного управления.
ЛИТЕРАТУРА 1. Boldea I., Nasar S.A. Electric Drives. – CRC
Press Boca London, 1999. – 350 p. 2. Блашке Ф. Принцип ориентации по полю –
основа системы регулирования асинхронных машин

ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ ТА АВТОМАТИЗАЦІЯ. ЕЛЕКТРИЧНІ МАШИНИ І АПАРАТИ. ЕНЕРГЕТИКА
Вісник КрНУ імені Михайла Остроградського. Випуск 1/2013 (78). 17
// Автоматизированный электропривод. – М.: ВИНИТИ, 1972. – № 2. – С. 1–10.
3. Peter Vas. Sensorless Vector and Direct Torque Control. – Oxford University Press, 1998. – 729 p.
4. Фираго Б.И., Павлячик Л.Б. Регулируемые электроприводы переменного тока: монография. – Мн.: Техноперспектива, 2006. – 363 с.
5. Фираго Б.И. Расчет характеристик и показа-телей трехфазных вентильных двигателей перемен-ного тока // Вiсник Кременьчуцького державного унiверситету iменi Мiхайла Остроградьского. – 2010. – Вип. 3/2010 (62), част. 1. – С. 48–52.
6. Andrzej M. Trzynadlowski. Control of induction motors. – Academic Press, N.Y., 2001. – 228 p.
THE ANALYSIS OF AC MOTOR VECTOR CONTROL
B. Firago Belarusian National Technical University prosp. Nezavisimosti, 65, Minsk, 220013, Belarus. E–mail: [email protected] The paper considers existing systems of vector control of alternating current motors, identifies the peculiar features
for their classification and analyzes their properties. Mathematical models and functional charts of vector control of in-duction motor (IM) with the “x” axis orientation of the “x-y” coordinate system along the rotor flux linkage, self induc-tion and stator are described. It is found that the simplest relations can be obtained with “x” axis orientation in the “x-y” coordinate system along with the rotor flux linkage. The mathematical models and functional charts of induction motor resented in this paper allow understanding the core principle of vector control and can be used for compiling of the functional diagrams appropriately related to the specified type of vector control.
Key words: vector control, induction motor, flux linkage, coordinate axes.
REFERENCES 1. Boldea I., Nasar S.A. Electric Drives. – CRC
Press Boca London, 1999. – 350 p. 2. Blashke F. The field orientation principle – the
basis of the systems of induction machine regulation // Avtomatizirovannyi elektroprivod. – Мoscow: VINI-TY, 1972, №2. – PP. 1-10. [in Russian]
3. Peter Vas. Sensorless Vector and Direct Torque Control. – Oxford University Press, 1998. – 729 p.
4. Firago B. Pavlichjak L. Reguliruemye elektro-privody peremennogo toka [Regulated alternating cur-rent electric drives]: Monograph.– Minsk: Technoper-spective, 2006. – 363 p. [in Russian]
5. Firago B. The calculation of the characteristics and features of three-phase alternating current SRM motors. // Transactions of Kremenchuk Mykhailo Os-trohradskyi State University. – Kremenchuk: KrNU, 2010. – Iss. 3/2010 (62), chastina 1. – PP. 48–52. [in Russian]
6. Andrzej M. Trzynadlowski. Control of induc-tion motors. – Academic Press, N.Y., 2001. – 228 p.
Стаття надійшла 15.02.2013.