Embed Size (px)
Citation preview
유비쿼터스 홈에서의
Zigbee개발동향 및 적용사례
2008 년 7월
㈜ 씨브이네트
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서과제추진 배경
□ 기술개발의 필요성
□ 독립적으로 운용되는(출입통제, CCTV 등)시스템과 위치기반 기술의 상호연계를
통하여 관련된 부가 서비스가 필수적으로 요구되고 있음.
□ 따라서 유비쿼터스 아파트에서 USN(Ubiquitous Sensor Network)을 이용하여
위치기반 서비스 제공을 위한 선행적인 시스템 개발 및 검증 필요.
□ 당사 주택부문의 핵심 상품인 유비쿼터스 아파트에 본 기술을 적용 및 상용화하여
기술력 향상과 첨단 이미지 제고 필요.
• 현장 근로자(입주자)의 안전과 편의를 위해 위치기반 서비스 요구는 점점 높아지는 추세임.
• 출입통제, 보안, 위급상황, 위치확인 등의 다양한 서비스 및 상품 개발 가능
<USN>
USN은 각종 센서로 부터 사물 및 환경 정보를 감지 및 저장하고 상황인식 정보를 언제, 어디서나, 누구나 자유롭게 이용할 수 있는 지능형 사회를
위한 기반 인프라.
2
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서과제추진 배경
□ 최종목표
□ 위치정보 수집을 위한 USN인프라 설계 및 구성모듈 개발
□ 수집된 위치정보를 토대로 독립적으로 운용되는(출입통제, CCTV 등)시스템과
상호연계 서비스를 위한 위치기반 서비스 엔진 개발
□ 위치정보 확인에 있어 환경적인 문제(구조물에 의한 장애 등)에 대한 다양한 적용 및
기술 검증
• 위치정보 확인을 위한 휴대용 무선 센서모듈 개발
• 휴대용 무선 센서모듈과 통신을 위한 집중기(라우터) 개발
• 무선 센서 인프라(USN) 관리 시스템 개발
• 타 시스템과 상호연계를 위한 I/F 개발
• 주택 신상품발표회 및 응용분야 BMT 실시
• ’08年 아파트 신축현장 적용
3
신상품 발표회 및 지적재산권 분야
기술 타당성 검증 단계
4
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 신상품발표회 부문
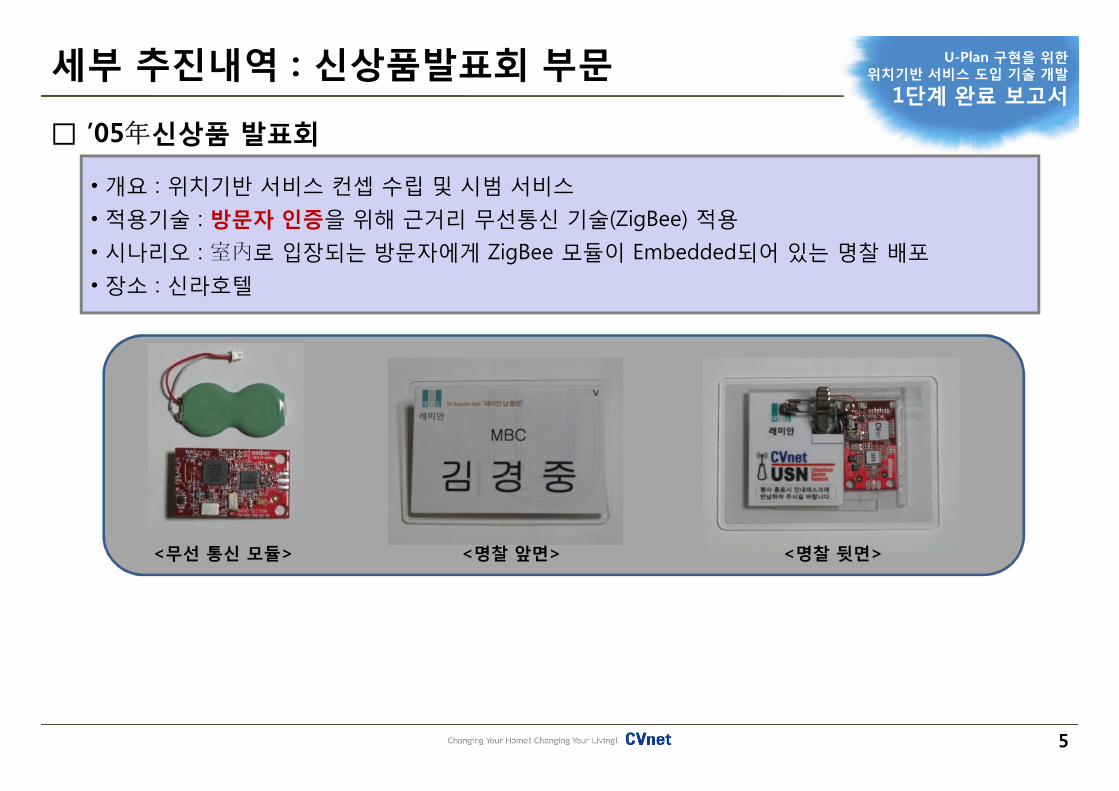
□ ’05年신상품 발표회
• 개요 : 위치기반 서비스 컨셉 수립 및 시범 서비스
• 적용기술 : 방문자 인증을 위해 근거리 무선통신 기술(ZigBee) 적용
• 시나리오 : 室內로 입장되는 방문자에게 ZigBee 모듈이 Embedded되어 있는 명찰 배포
• 장소 : 신라호텔
<명찰 앞면> <명찰 뒷면><무선 통신 모듈>
5
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 신상품발표회 부문
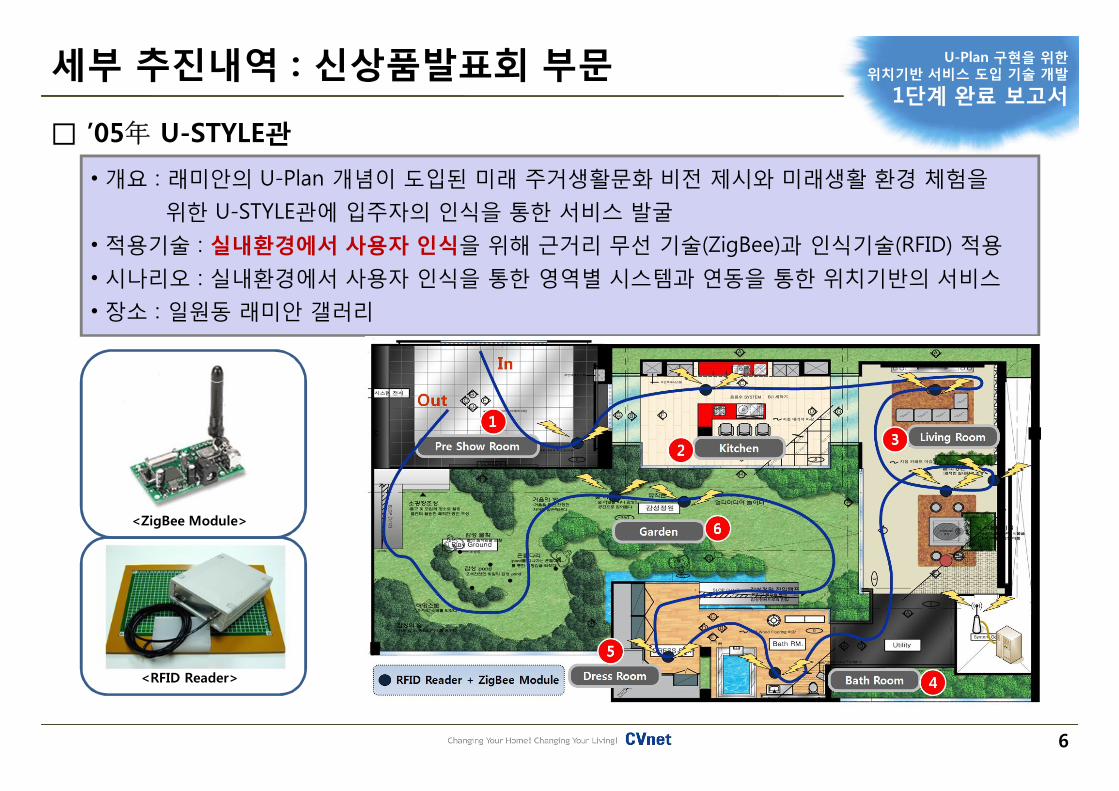
□ ’05年 U-STYLE관
• 개요 : 래미안의 U-Plan 개념이 도입된 미래 주거생활문화 비전 제시와 미래생활 환경 체험을
위한 U-STYLE관에 입주자의 인식을 통한 서비스 발굴
• 적용기술 : 실내환경에서 사용자 인식을 위해 근거리 무선 기술(ZigBee)과 인식기술(RFID) 적용
• 시나리오 : 실내환경에서 사용자 인식을 통한 영역별 시스템과 연동을 통한 위치기반의 서비스
• 장소 : 일원동 래미안 갤러리
<ZigBee Module>
<RFID Reader>
6
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 신상품발표회 부문
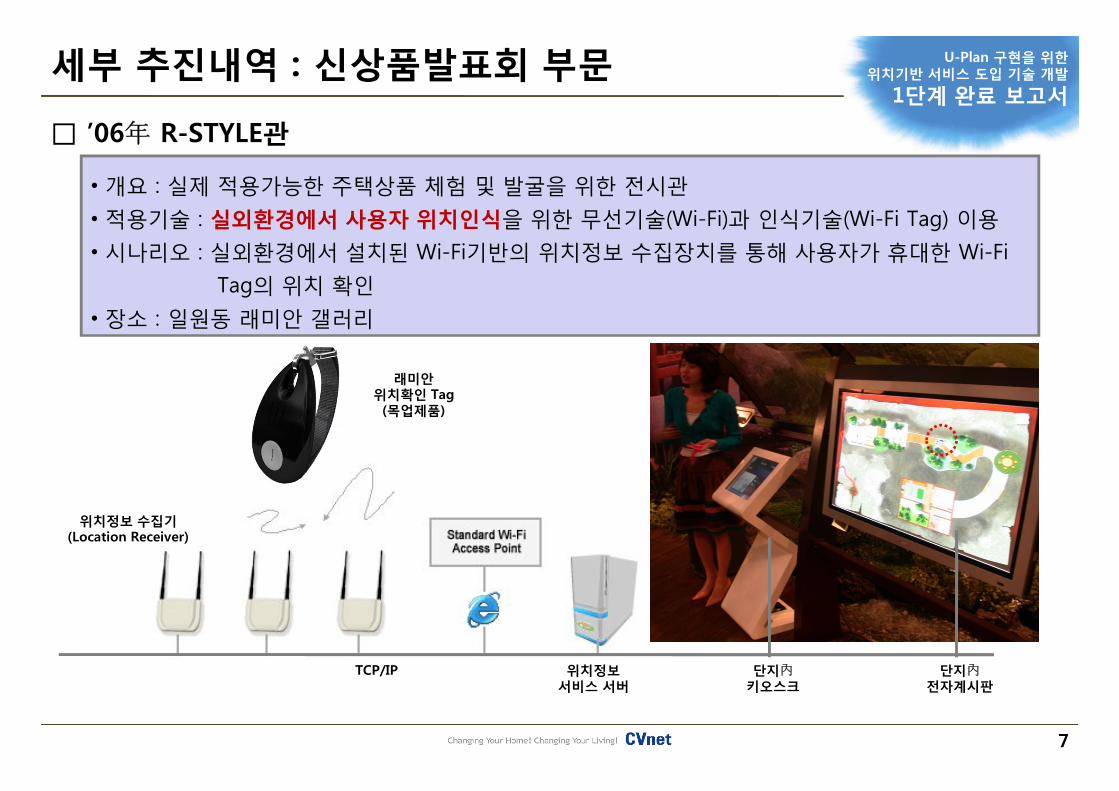
□ ’06年 R-STYLE관
• 개요 : 실제 적용가능한 주택상품 체험 및 발굴을 위한 전시관
• 적용기술 : 실외환경에서 사용자 위치인식을 위한 무선기술(Wi-Fi)과 인식기술(Wi-Fi Tag) 이용
• 시나리오 : 실외환경에서 설치된 Wi-Fi기반의 위치정보 수집장치를 통해 사용자가 휴대한 Wi-Fi
Tag의 위치 확인
• 장소 : 일원동 래미안 갤러리
위치정보 수집기(Location Receiver)
TCP/IP 위치정보서비스 서버
단지內키오스크
단지內전자계시판
래미안위치확인 Tag(목업제품)
7
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 신상품발표회 부문
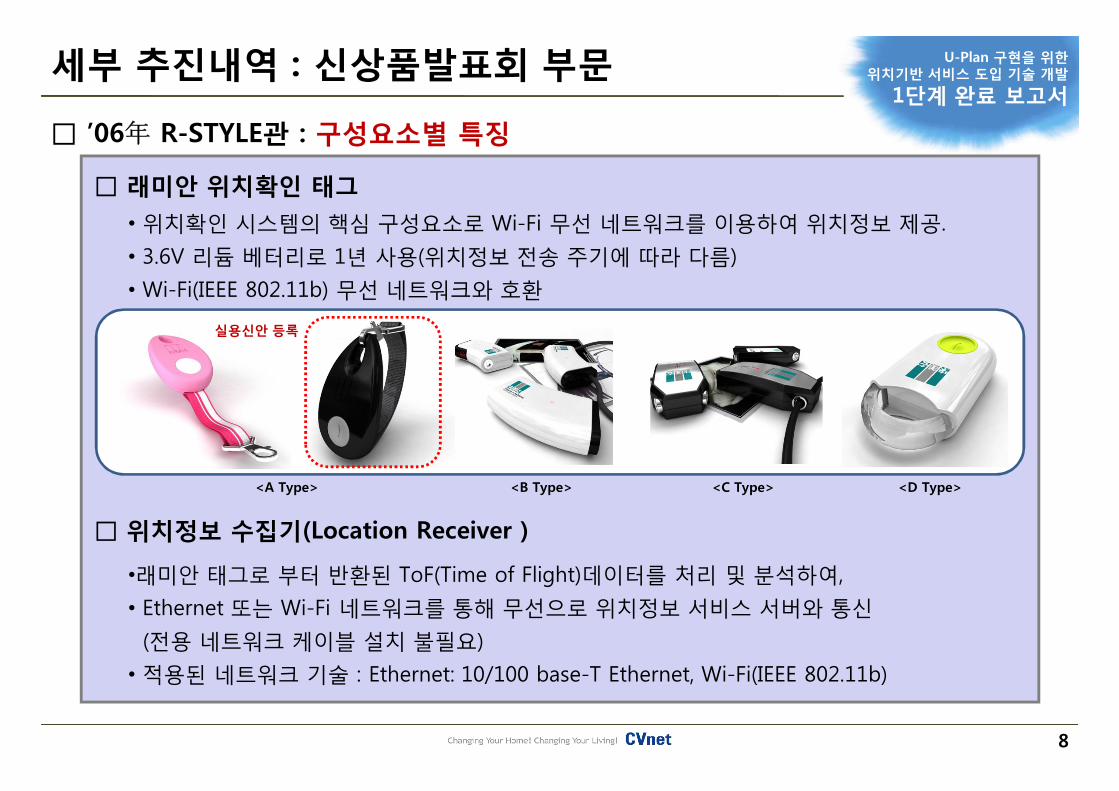
□ ’06年 R-STYLE관 : 구성요소별 특징
□ 래미안 위치확인 태그
□ 위치정보 수집기(Location Receiver )
• 위치확인 시스템의 핵심 구성요소로 Wi-Fi 무선 네트워크를 이용하여 위치정보 제공.
• 3.6V 리듐 베터리로 1년 사용(위치정보 전송 주기에 따라 다름)
• Wi-Fi(IEEE 802.11b) 무선 네트워크와 호환
•래미안 태그로 부터 반환된 ToF(Time of Flight)데이터를 처리 및 분석하여,
• Ethernet 또는 Wi-Fi 네트워크를 통해 무선으로 위치정보 서비스 서버와 통신
(전용 네트워크 케이블 설치 불필요)
• 적용된 네트워크 기술 : Ethernet: 10/100 base-T Ethernet, Wi-Fi(IEEE 802.11b)
<A Type> <B Type> <C Type> <D Type>
실용신안 등록
8
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 지적재산권 부문
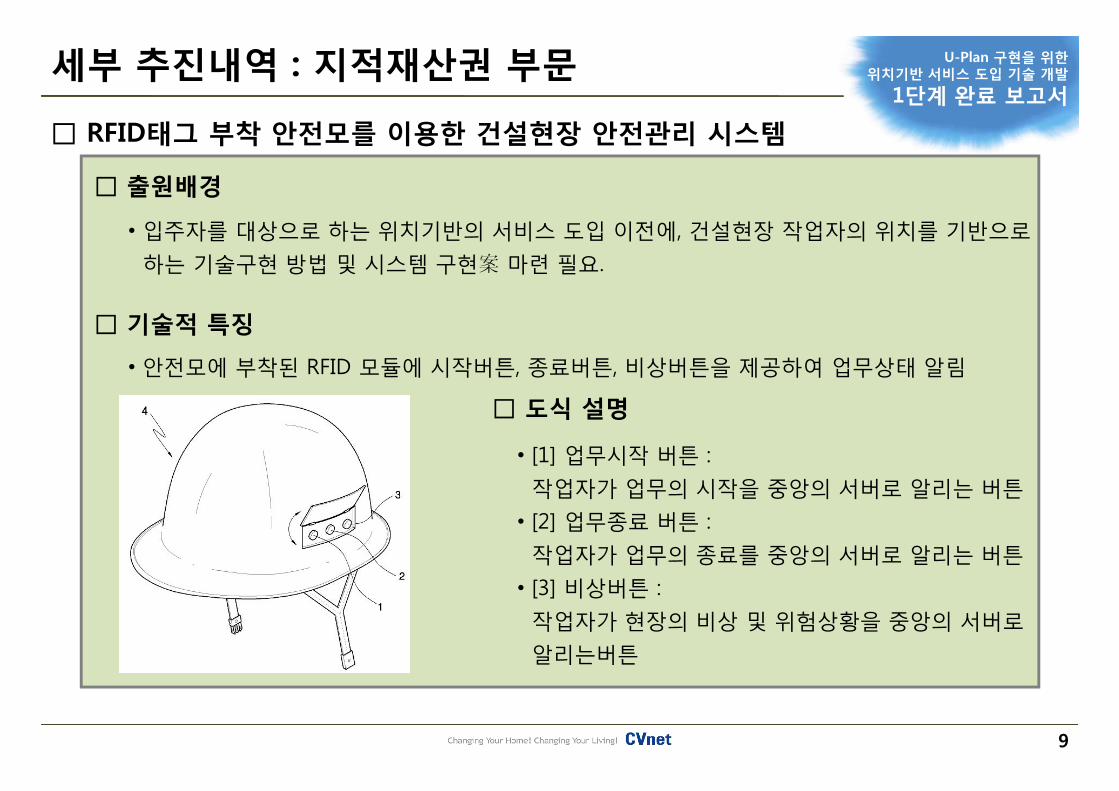
□ RFID태그 부착 안전모를 이용한 건설현장 안전관리 시스템
□ 출원배경
□ 기술적 특징
□ 도식 설명
• 안전모에 부착된 RFID 모듈에 시작버튼, 종료버튼, 비상버튼을 제공하여 업무상태 알림
• [1] 업무시작 버튼 :
작업자가 업무의 시작을 중앙의 서버로 알리는 버튼
• [2] 업무종료 버튼 :
작업자가 업무의 종료를 중앙의 서버로 알리는 버튼
• [3] 비상버튼 :
작업자가 현장의 비상 및 위험상황을 중앙의 서버로
알리는버튼
9
• 입주자를 대상으로 하는 위치기반의 서비스 도입 이전에, 건설현장 작업자의 위치를 기반으로
하는 기술구현 방법 및 시스템 구현案 마련 필요.
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 지적재산권 부문
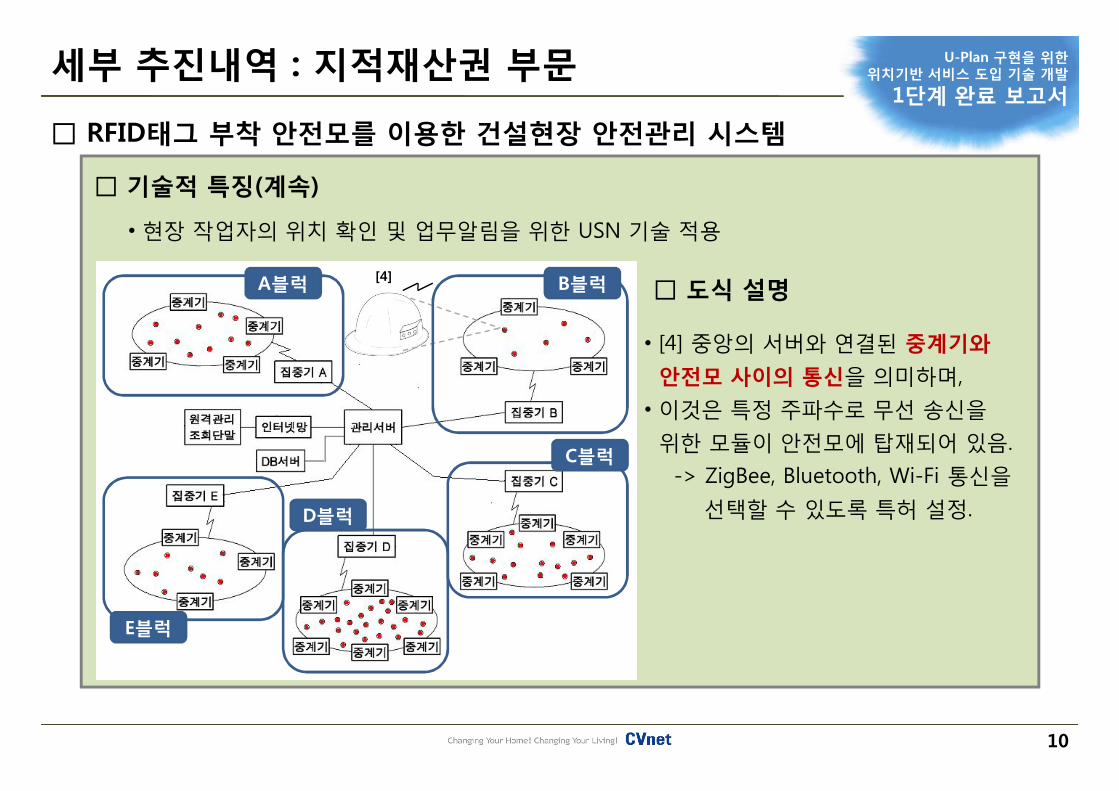
□ RFID태그 부착 안전모를 이용한 건설현장 안전관리 시스템
□ 기술적 특징(계속)
□ 도식 설명
• 현장 작업자의 위치 확인 및 업무알림을 위한 USN 기술 적용
• [4] 중앙의 서버와 연결된 중계기와
안전모 사이의 통신을 의미하며,
• 이것은 특정 주파수로 무선 송신을
위한 모듈이 안전모에 탑재되어 있음.
-> ZigBee, Bluetooth, Wi-Fi 통신을
선택할 수 있도록 특허 설정.
A블럭 B블럭
C블럭
E블럭
D블럭
10
[4]
기술동향 조사 및 분석 분야
선진기술동향 분석 단계
11
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 기술동향 조사 분석
□ 기술동향 (1/3)
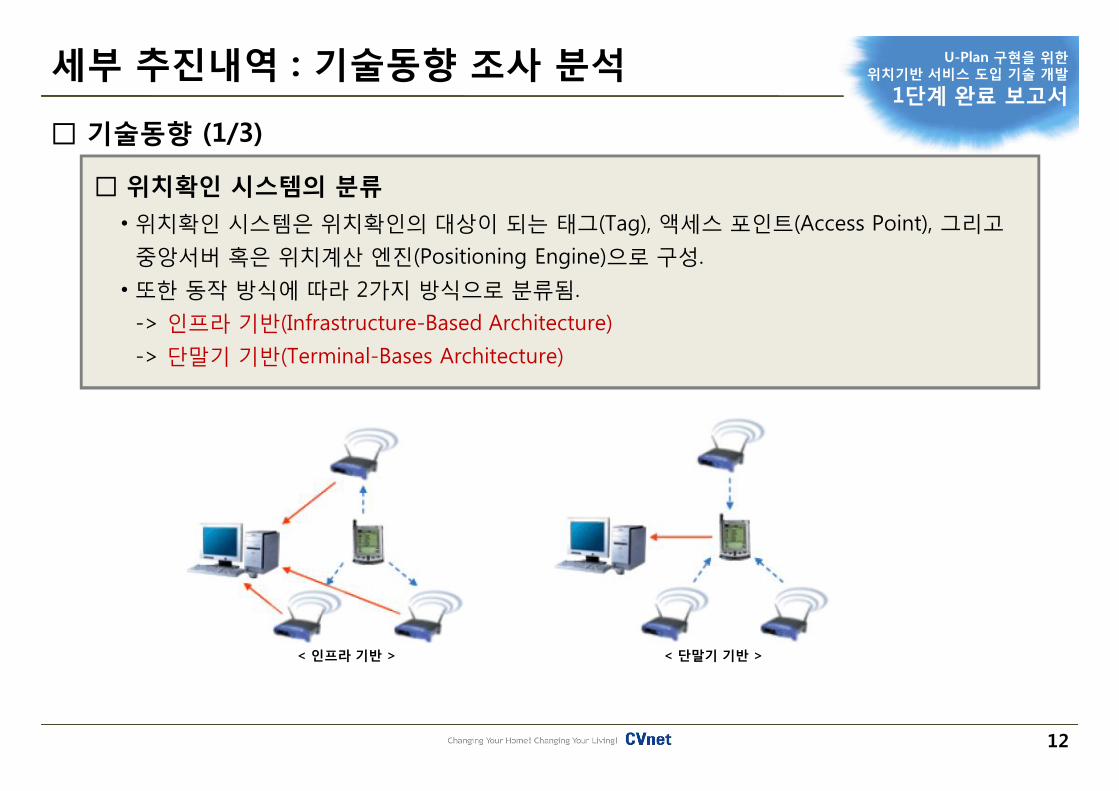
□ 위치확인 시스템의 분류
• 위치확인 시스템은 위치확인의 대상이 되는 태그(Tag), 액세스 포인트(Access Point), 그리고
중앙서버 혹은 위치계산 엔진(Positioning Engine)으로 구성.
• 또한 동작 방식에 따라 2가지 방식으로 분류됨.
-> 인프라 기반(Infrastructure-Based Architecture)
-> 단말기 기반(Terminal-Bases Architecture)
12
< 인프라 기반 > < 단말기 기반 >
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 기술동향 조사 분석
□ 기술동향 (2/3)
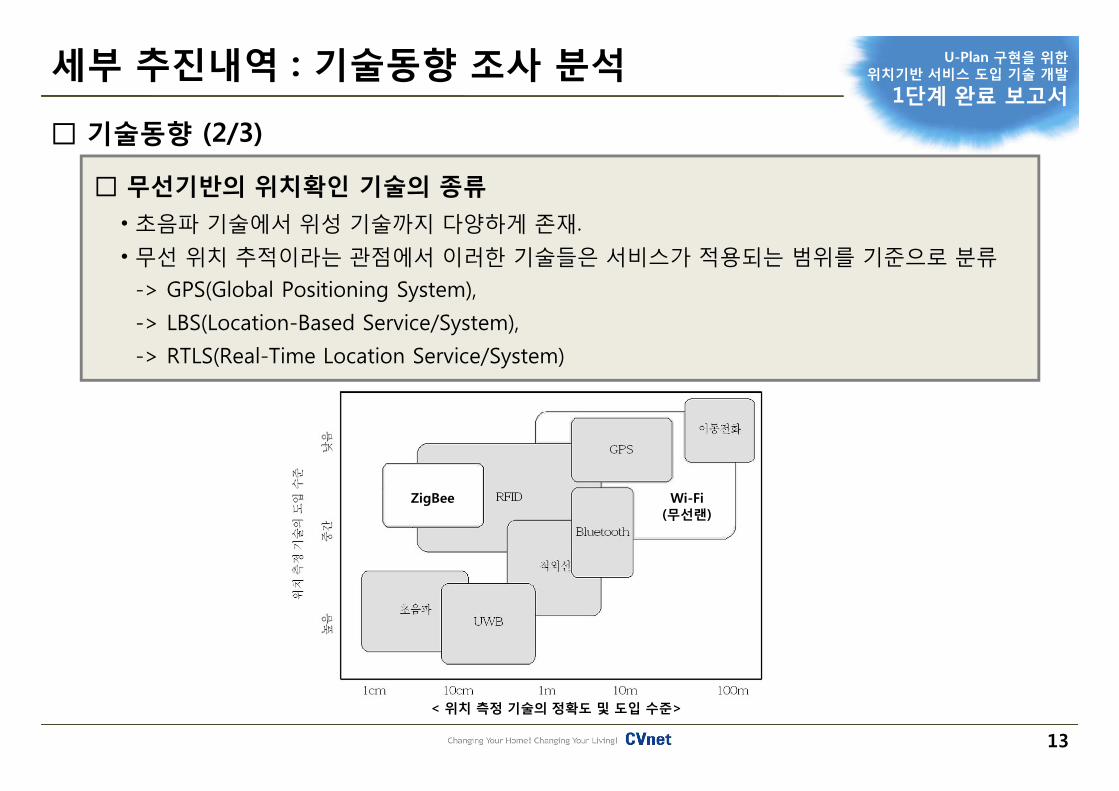
□ 무선기반의 위치확인 기술의 종류
• 초음파 기술에서 위성 기술까지 다양하게 존재.
• 무선 위치 추적이라는 관점에서 이러한 기술들은 서비스가 적용되는 범위를 기준으로 분류
-> GPS(Global Positioning System),
-> LBS(Location-Based Service/System),
-> RTLS(Real-Time Location Service/System)
13
< 위치 측정 기술의 정확도 및 도입 수준>
ZigBee Wi-Fi(무선랜)
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 기술동향 조사 분석
□ 기술동향 (3/3)
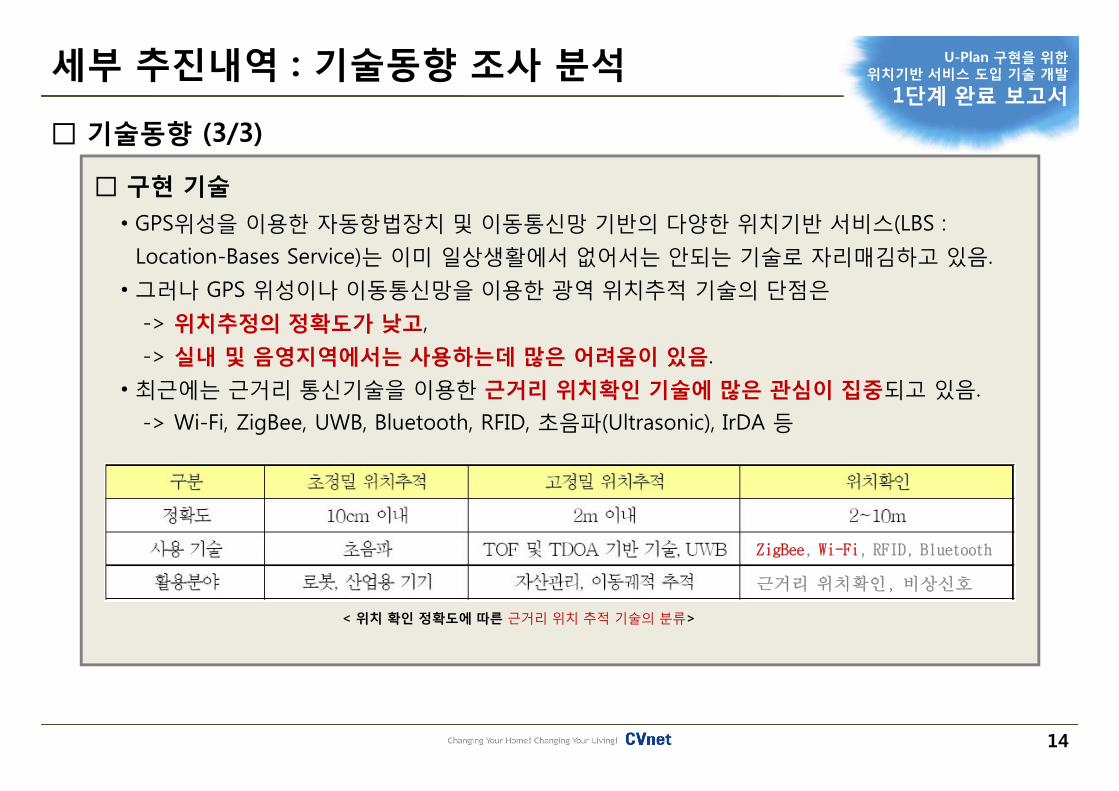
□ 구현 기술
• GPS위성을 이용한 자동항법장치 및 이동통신망 기반의 다양한 위치기반 서비스(LBS :
Location-Bases Service)는 이미 일상생활에서 없어서는 안되는 기술로 자리매김하고 있음.
• 그러나 GPS 위성이나 이동통신망을 이용한 광역 위치추적 기술의 단점은
-> 위치추정의 정확도가 낮고,
-> 실내 및 음영지역에서는 사용하는데 많은 어려움이 있음.
• 최근에는 근거리 통신기술을 이용한 근거리 위치확인 기술에 많은 관심이 집중되고 있음.
-> Wi-Fi, ZigBee, UWB, Bluetooth, RFID, 초음파(Ultrasonic), IrDA 등
근거리 위치확인, 비상신호
14
ZigBee, Wi-Fi, RFID, Bluetooth
< 위치 확인 정확도에 따른 근거리 위치 추적 기술의 분류>
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 기술동향 조사 분석
□ 위치기반 서비스 도입을 위한 기술 검토(1/4)
□ 위치기반 서비스 도입을 위한 기술 검토
• 근거리에서 위치확인을 위해 2가지 기술 검토
-> ZigBee (IEEE 802.15.4)의 기술적 특징
-> Wi-Fi (802.11b)의 기술적 특징
• 본 기술과제와 관련하여 USN(Ubiquitous Sensor Network) 요소기술과 응용분야 조사를 위해
-> ember 社 의 ZigBee 트레이닝 코스 참가
-> 무선 네트워크 기술 동향 파악
-> 센서 네트워크의 적용사례 및 활용 방안 논의
15
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 기술동향 조사 분석
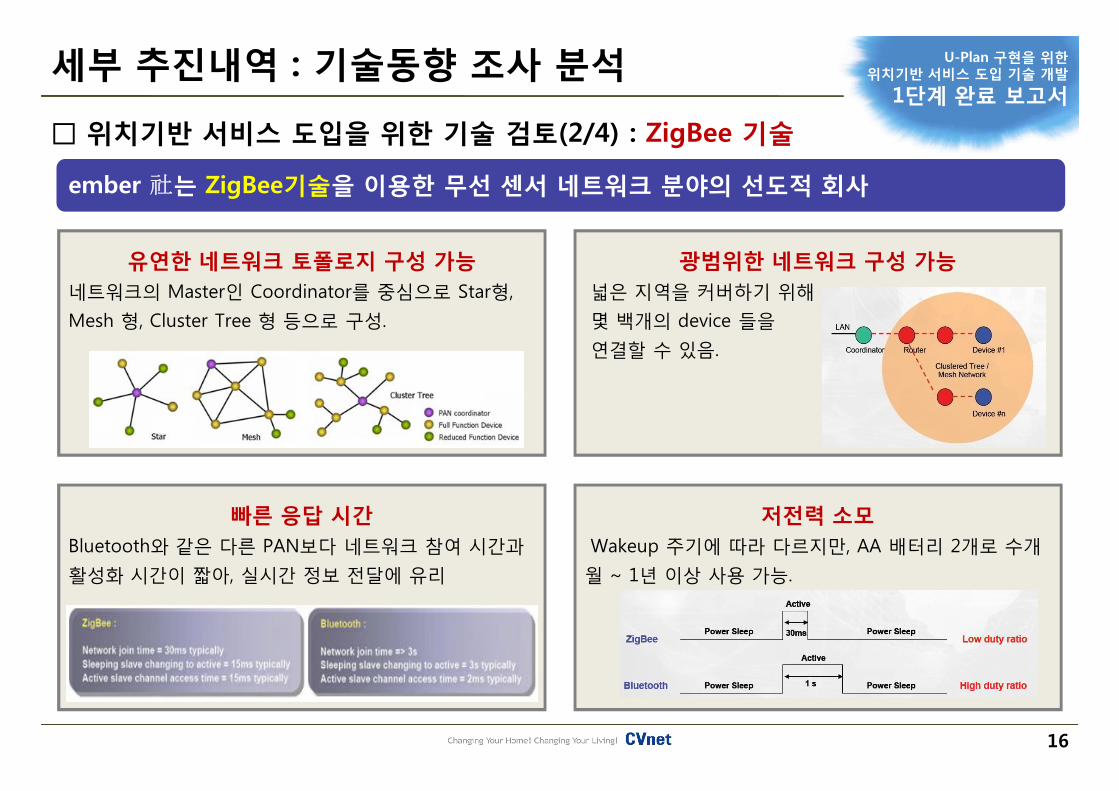
□ 위치기반 서비스 도입을 위한 기술 검토(2/4) : ZigBee 기술
ember 社는 ZigBee기술을 이용한 무선 센서 네트워크 분야의 선도적 회사
16
유연한 네트워크 토폴로지 구성 가능
네트워크의 Master인 Coordinator를 중심으로 Star형,
Mesh 형, Cluster Tree 형 등으로 구성.
광범위한 네트워크 구성 가능
넓은 지역을 커버하기 위해
몇 백개의 device 들을
연결할 수 있음.
빠른 응답 시간
Bluetooth와 같은 다른 PAN보다 네트워크 참여 시간과
활성화 시간이 짧아, 실시간 정보 전달에 유리
저전력 소모
Wakeup 주기에 따라 다르지만, AA 배터리 2개로 수개
월 ~ 1년 이상 사용 가능.
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 기술동향 조사 분석
□ 위치기반 서비스 도입을 위한 기술 검토(3/4) : Wi-Fi 기술
□ 위치확인을 위해 Wi-Fi기술 도입 배경
□ 무선랜 기반의 위치정보 서비스가 주목을 받고 있는 이유
□ Wi-Fi기술을 이용한 위치정보 서비스의 장점
• 무선랜 기반의 응용 서비스 개발보다는 무선랜을 사용할 수 있는 인프라의 보급이 우선.
• 그러나 최근 무선랜 기술을 응용한 서비스의 개발에 대한 관심 증대
-> 그 핵심으로 떠오르고 있는 것이 무선랜 기술을 이용한 위치정보 서비스임.
17
• 대량 생산이 가능해지면서 저가격화에 따라 무선랜 보급 확대
• 위치정보에 대한 요구 증가
• GPS나 LBS 서비스가 갖는 문제들을 쉽게 해결 가능.
• GPS나 LBS가 지원하지 못하는 건물 내부 및 음영 지역에서의 위치 확인 가능.
• 무선랜 기술은 3m 정도의 높은 위치 추정 정확도 제공.
• 위치정보 서비스와 함께 고속 데이터 통신 가능.
• 이미 성숙한 기술을 이용하기 때문에 안정적.
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 기술동향 조사 분석
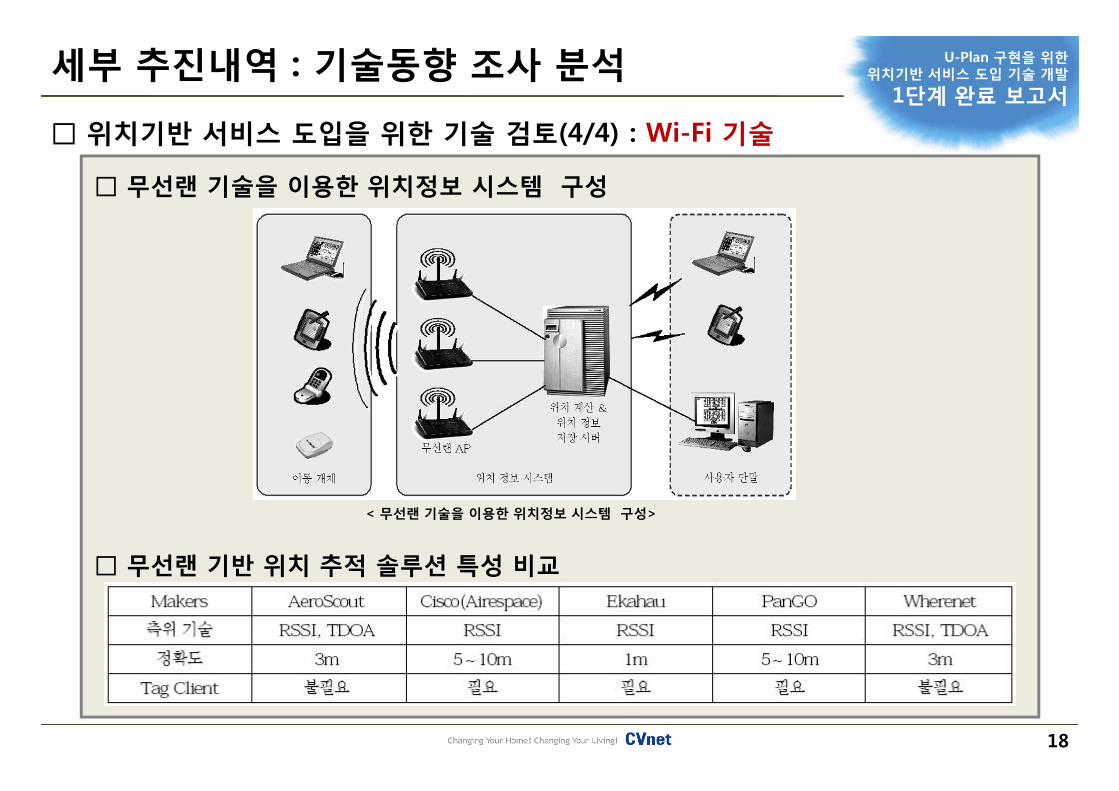
□ 위치기반 서비스 도입을 위한 기술 검토(4/4) : Wi-Fi 기술
□ 무선랜 기술을 이용한 위치정보 시스템 구성
□ 무선랜 기반 위치 추적 솔루션 특성 비교
18
< 무선랜 기술을 이용한 위치정보 시스템 구성>
위치기반 서비스를 위한 구성 모듈 개발
실증기술 개발 단계
19
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 위치기반 서비스 구성모듈 개발
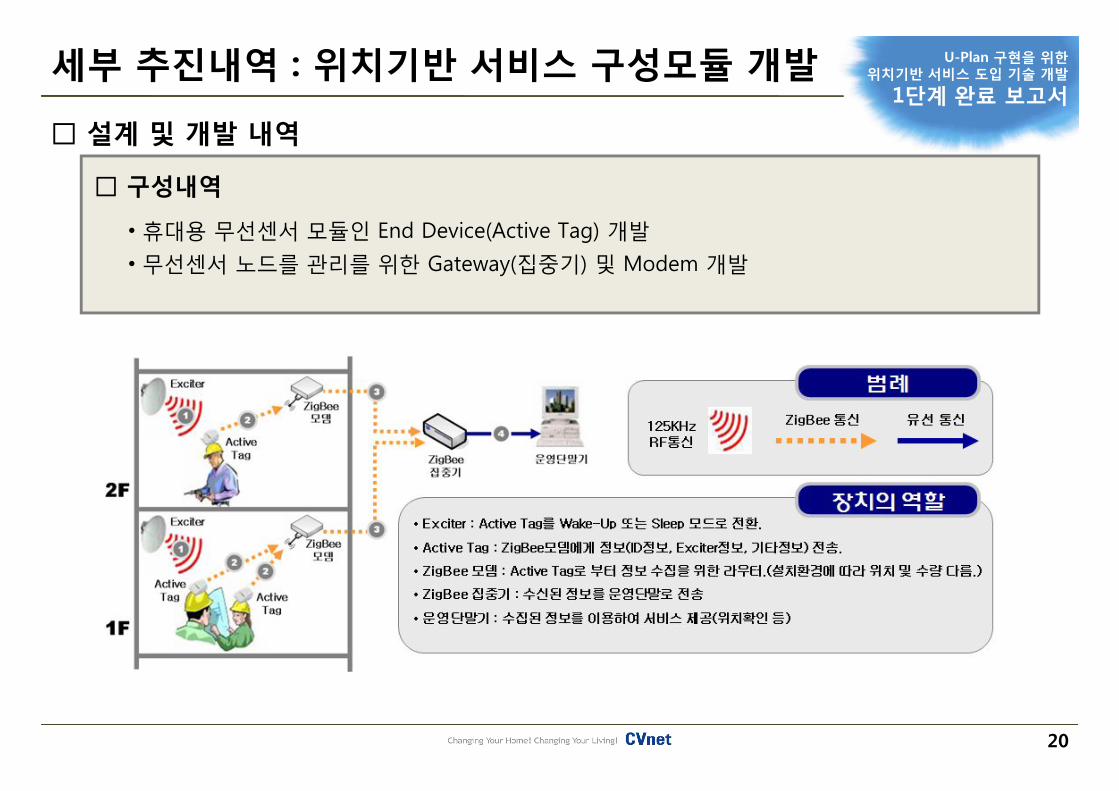
□ 설계 및 개발 내역
□ 구성내역
• 휴대용 무선센서 모듈인 End Device(Active Tag) 개발
• 무선센서 노드를 관리를 위한 Gateway(집중기) 및 Modem 개발
20
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 위치기반 서비스 구성모듈 개발
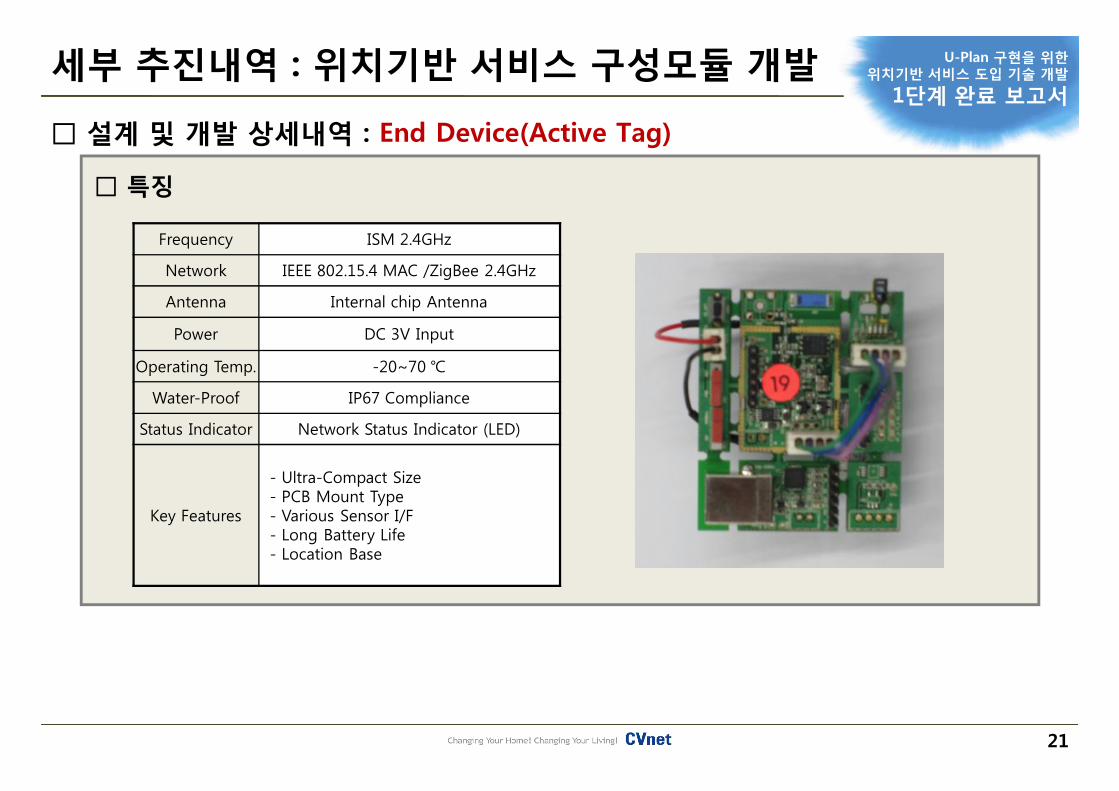
□ 설계 및 개발 상세내역 : End Device(Active Tag)
□ 특징
Frequency ISM 2.4GHz
Network IEEE 802.15.4 MAC /ZigBee 2.4GHz
Antenna Internal chip Antenna
Power DC 3V Input
Operating Temp. -20~70 ℃
Water-Proof IP67 Compliance
Status Indicator Network Status Indicator (LED)
Key Features
- Ultra-Compact Size- PCB Mount Type- Various Sensor I/F- Long Battery Life- Location Base
21
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 위치기반 서비스 구성모듈 개발
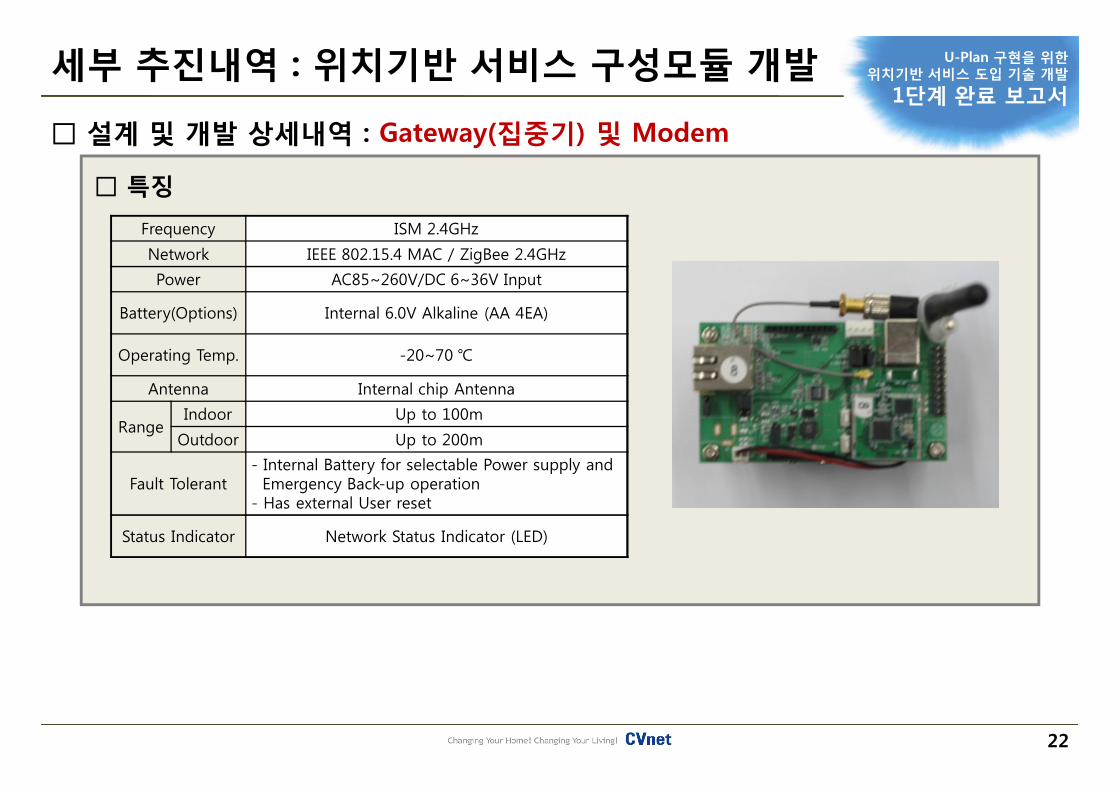
□ 설계 및 개발 상세내역 : Gateway(집중기) 및 Modem
□ 특징
Frequency ISM 2.4GHz
Network IEEE 802.15.4 MAC / ZigBee 2.4GHz
Power AC85~260V/DC 6~36V Input
Battery(Options) Internal 6.0V Alkaline (AA 4EA)
Operating Temp. -20~70 ℃
Antenna Internal chip Antenna
RangeIndoor Up to 100m
Outdoor Up to 200m
Fault Tolerant- Internal Battery for selectable Power supply andEmergency Back-up operation
- Has external User reset
Status Indicator Network Status Indicator (LED)
22
현장 BMT 및 응용
현장 BMT를 통한 테스트 단계
23
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 현장 BMT 및 응용
□ 실내 환경 테스트를 위한 지하주차장 현장 BMT실시 (1/4)
□ BMT 목적
□ BMT 목표
□ BMT 개요
• 개발된 모듈을 이용하여 실내의 구조적인 장애물에 의한 위치 인식 정확도 및 오차범위 확인
• 일시 : 2007년 7월 16일 오후 4:00 ~ 5:30
• 장소 : 역삼동 개나리2차 재건축, 지하주차장 B2
• 적용기술 : Wi-Fi 기술
• 통신에 있어서 환경적인 장애 요소인 지하 주자장의 건축 구조물에서 Zigbee 망을 이용한
USN을 구축하여 비상신호 수신 및 수신 된 위치 값의 신뢰성 확인
24
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 현장 BMT 및 응용
□ 실내 환경 테스트를 위한 지하주차장 현장 BMT실시 (2/4)
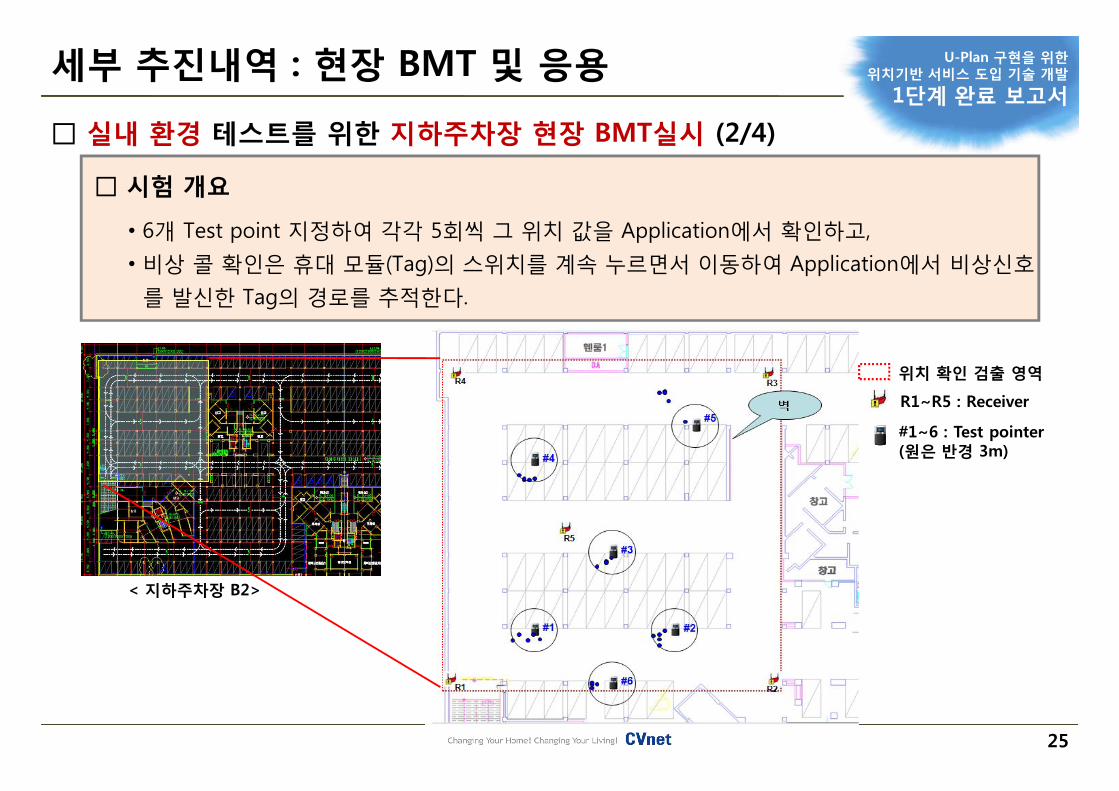
□ 시험 개요
• 6개 Test point 지정하여 각각 5회씩 그 위치 값을 Application에서 확인하고,
• 비상 콜 확인은 휴대 모듈(Tag)의 스위치를 계속 누르면서 이동하여 Application에서 비상신호
를 발신한 Tag의 경로를 추적한다.
위치 확인 검출 영역
R1~R5 : Receiver
#1~6 : Test pointer(원은 반경 3m)
< 지하주차장 B2>
25
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 현장 BMT 및 응용
□ 실내 환경 테스트를 위한 지하주차장 현장 BMT실시 (3/4)
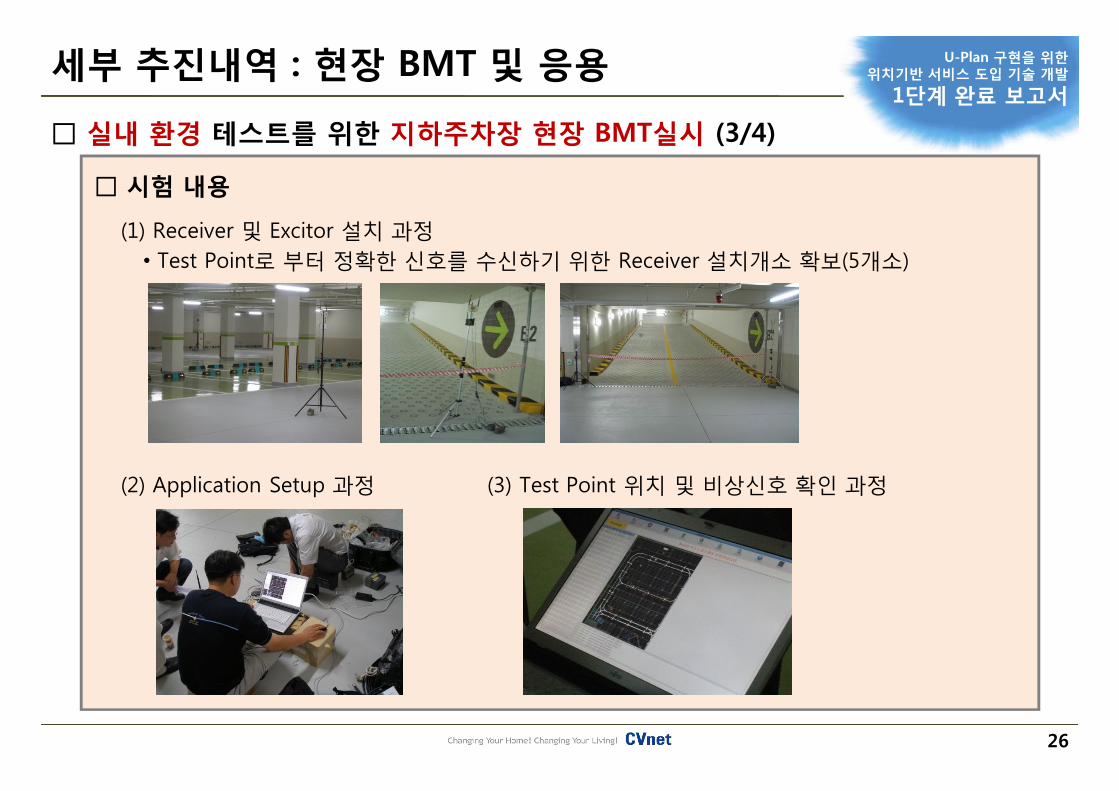
□ 시험 내용
• Test Point로 부터 정확한 신호를 수신하기 위한 Receiver 설치개소 확보(5개소)
(1) Receiver 및 Excitor 설치 과정
(2) Application Setup 과정 (3) Test Point 위치 및 비상신호 확인 과정
26
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 현장 BMT 및 응용
□ 실내 환경 테스트를 위한 지하주차장 현장 BMT실시 (4/4)
□ 시험 결과
(1) 위치 인식 측정 결과
• 벽이 없고 기둥만 있는 영역에서의 위치 인식은 Test pointer #1~6 모두 오차 평균 거리
3m 안에 분포함.
• Test pointer #5 를 제외한 다른 곳의 경우는 비교적 정확하게 그 위치가 인식됨
-> Test pointer #5의 경우는 벽이 있어 전파가 반사되어 오차가 많이 발생된 것으로 추정됨.
-> 그러나 위치 인식 기능을 적용하기에는 큰 무리가 없을 것으로 예상됨.
-> Test 결과를 위치인식 오차 범위를 5~7m 이내의 경우에도 위치 확인의 문제는 없었음
(2) 음영지역에 대한 의견
• 음영 지역이라는 것은 전파를 수신하지 못하는 지역을 의미하며, 본 BMT에서는 Test pointer
#5 위치에서 구조적인 문제(벽)로 인해 위치 오차(2M~4M 이내)가 다소 발생하였음.
-> 따라서 Receiver의 위치는 구조적인 문제에서도 최적의 정보를 수신할 수 있도록 설치
이전에 충분한 테스트 필요.
27
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 현장 BMT 및 응용
□ 실외 환경 테스트를 위한 개활지(놀이터) BMT실시 (1/6)
□ BMT 목적
□ BMT 목표
□ BMT 개요
• 개발된 모듈을 이용하여 개활지에서의 위치확인을 위한 모듈별 통신반경 분석
• 개활지에서의 개발된 Zigbee 모듈의 성능 분석
• Blind node(End Device) 의 위치 표시 및 모니터링 동작 확인
• 일시 : 2007. 6. 20. (오후 2:00~4:00)
• 장소 : 양재동 인근 어린이 놀이터
• 적용기술 : ZigBee 기술
•Router node 설치 위치 : 바닥 또는 지표면에서 70~200Cm 높이
• Zigbee 망을 이용한 USN을 구축하여 비상신호 수신 및 위치 모니터링 테스트
• LBS(Location Based Service)가 가능한 Location Engine 이 탑재된 chipcon 사의 CC2431 를 적용한 모듈을
이용하여 위치 모니터링이 특성 분석.
• 이를 통한 휴대용 위치확인 모듈인 End Device의 설계에 반영
28
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 현장 BMT 및 응용
□ 실외 환경 테스트를 위한 개활지(놀이터) BMT실시 (2/6)
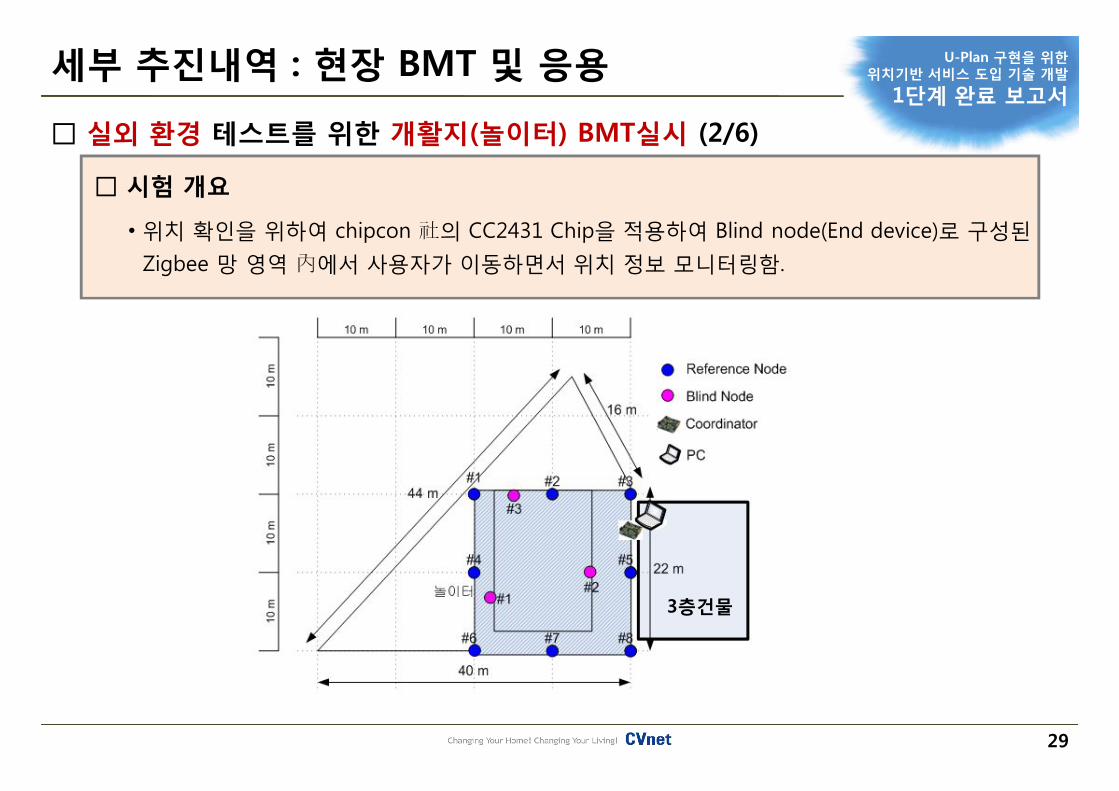
□ 시험 개요
• 위치 확인을 위하여 chipcon 社의 CC2431 Chip을 적용하여 Blind node(End device)로 구성된
Zigbee 망 영역 內에서 사용자가 이동하면서 위치 정보 모니터링함.
3층건물
29
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 현장 BMT 및 응용
□ 실외 환경 테스트를 위한 개활지(놀이터) BMT실시 (3/6)
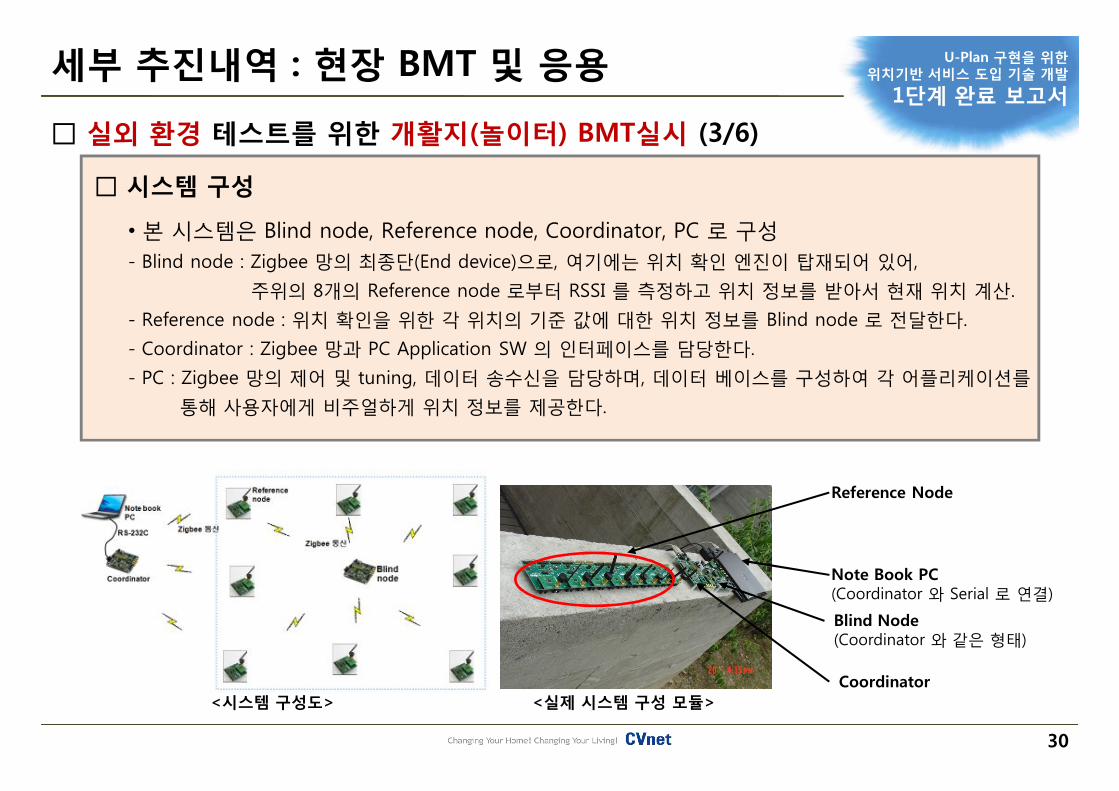
□ 시스템 구성
• 본 시스템은 Blind node, Reference node, Coordinator, PC 로 구성
- Blind node : Zigbee 망의 최종단(End device)으로, 여기에는 위치 확인 엔진이 탑재되어 있어,
주위의 8개의 Reference node 로부터 RSSI 를 측정하고 위치 정보를 받아서 현재 위치 계산.
- Reference node : 위치 확인을 위한 각 위치의 기준 값에 대한 위치 정보를 Blind node 로 전달한다.
- Coordinator : Zigbee 망과 PC Application SW 의 인터페이스를 담당한다.
- PC : Zigbee 망의 제어 및 tuning, 데이터 송수신을 담당하며, 데이터 베이스를 구성하여 각 어플리케이션를
통해 사용자에게 비주얼하게 위치 정보를 제공한다.
Note Book PC(Coordinator 와 Serial 로 연결)
Blind Node(Coordinator 와 같은 형태)
Coordinator
Reference Node
<시스템 구성도> <실제 시스템 구성 모듈>
30
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 현장 BMT 및 응용
□ 실외 환경 테스트를 위한 개활지(놀이터) BMT실시 (5/6)
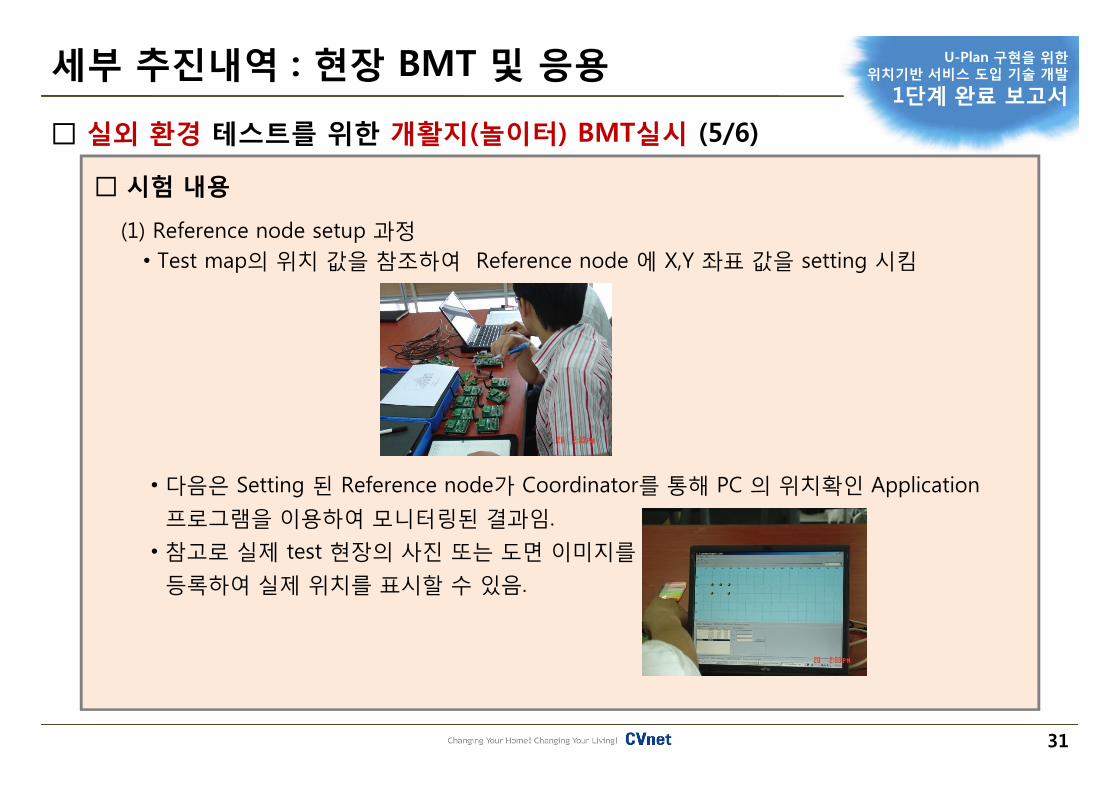
□ 시험 내용
• Test map의 위치 값을 참조하여 Reference node 에 X,Y 좌표 값을 setting 시킴
(1) Reference node setup 과정
• 다음은 Setting 된 Reference node가 Coordinator를 통해 PC 의 위치확인 Application
프로그램을 이용하여 모니터링된 결과임.
• 참고로 실제 test 현장의 사진 또는 도면 이미지를
등록하여 실제 위치를 표시할 수 있음.
31
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 현장 BMT 및 응용
□ 실외 환경 테스트를 위한 개활지(놀이터) BMT실시 (5/6)
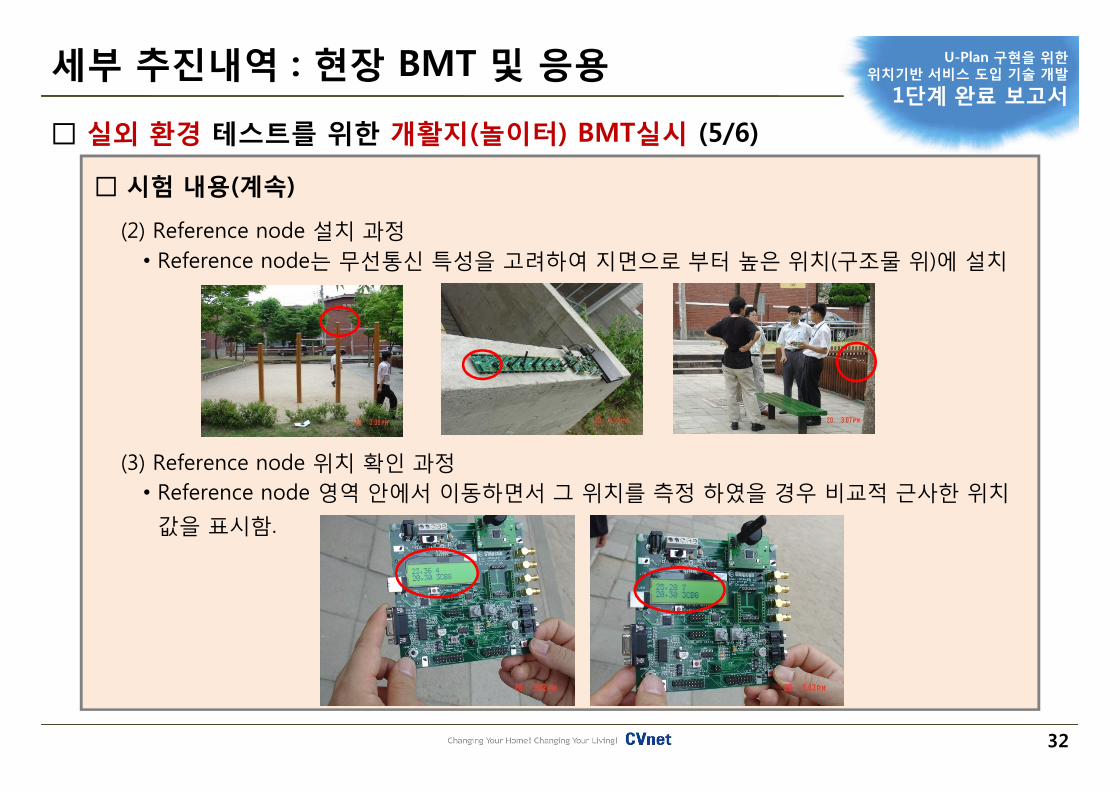
□ 시험 내용(계속)
• Reference node는 무선통신 특성을 고려하여 지면으로 부터 높은 위치(구조물 위)에 설치
(2) Reference node 설치 과정
• Reference node 영역 안에서 이동하면서 그 위치를 측정 하였을 경우 비교적 근사한 위치
값을 표시함.
(3) Reference node 위치 확인 과정
32
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 현장 BMT 및 응용
□ 실외 환경 테스트를 위한 개활지(놀이터) BMT실시 (6/6)
□ 시험 결과
(1) 시험결과에 대한 종합의견
• 시험결과 그 위치의 정확도가 평균 오차범위 3~4m 정도로 확인되었음.
• 이 오차 범위는 각 Application 에 따라 적용여부를 판단하는 기준 값으로 사용할 수 있으며,
이를 통한 위치 확인 서비스를 제공하는 경우에는 큰 무리가 없을 것으로 확인함.
(2) Location Engine Chip을 적용한 2차 모듈에 대한 의견
• 이번 시험에서 사용된 Blind node 는 주위의 Reference node 8 개로부터 RSSI 및 X,Y 위치
값을 받아 자신의 위치를 계산함으로써 주위 환경의 noise 및 간섭현상으로 인한 위치확인
값의 오차 범위가 1차 모듈 보다 현격하게 줄어 들었음
• 또한 다양한 위치확인 알고리즘을 적용하여 위치정보 신뢰도를 증가 하였음
- reference node 를 3개씩 묶어 여러 번 반복해서 계산하는 방법,
- 취득된 위치의 값 중 최대, 최소 값을 제외하고 계산하는 방법,
- 시간 개념을 적용하는 방법
• 이러한 각각의 알고리즘을 복합적으로 사용하면 더 확실한 위치 값을 얻을 수 있었음.
33
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 현장 BMT 및 응용
□ 응용 테스트를 위한 콘크리트 양생공정 BMT실시 (1/5)
□ BMT 목적
□ BMT 목표
□ BMT 개요
• 열악한 환경에서 개발된 모듈의 데이터 송수신 성능 시험
• 일시 : 2007. 6. 20. (오후 2:00~4:00)
• 장소 : 기술연구소(기흥)
• 적용기술 : ZigBee기술
• Zigbee 망을 이용한 USN을 구축하여 센서(온도)가 부착된 휴대 모듈로 부터 송,수신 신호 성능
34
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 현장 BMT 및 응용
□ 응용 테스트를 위한 콘크리트 양생공정 BMT실시 (2/5)
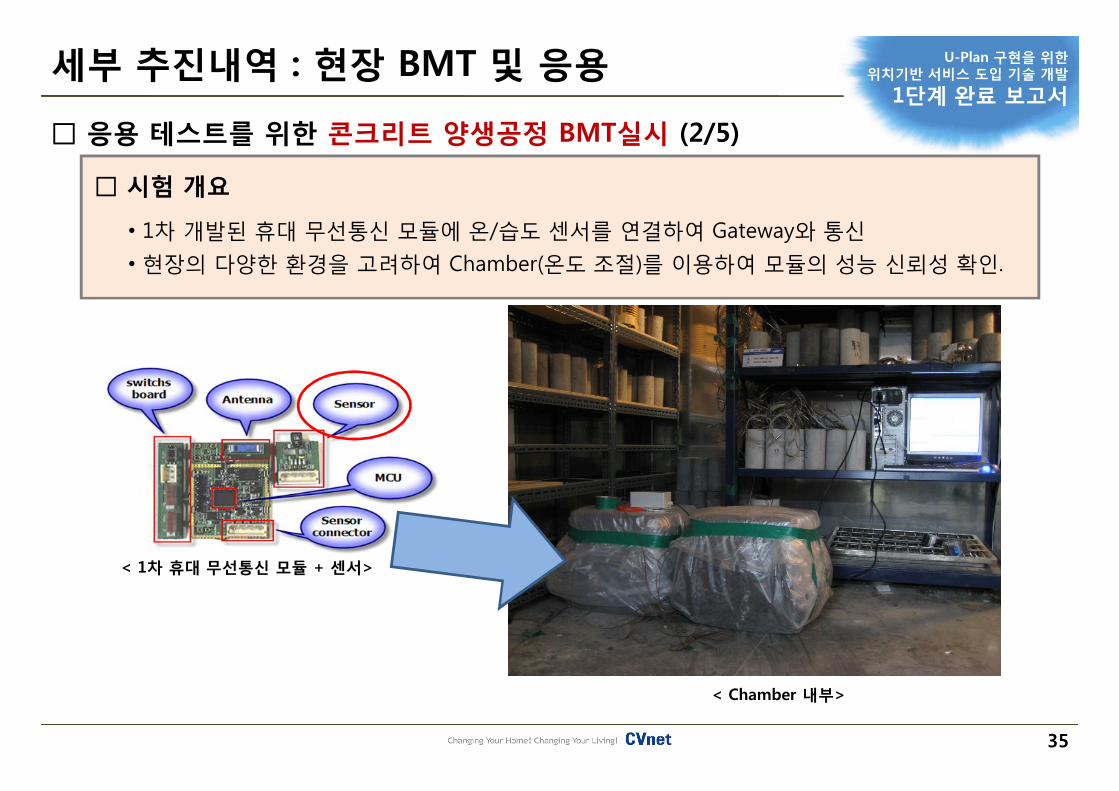
□ 시험 개요
• 1차 개발된 휴대 무선통신 모듈에 온/습도 센서를 연결하여 Gateway와 통신
• 현장의 다양한 환경을 고려하여 Chamber(온도 조절)를 이용하여 모듈의 성능 신뢰성 확인.
< Chamber 내부>
< 1차 휴대 무선통신 모듈 + 센서>
35
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 현장 BMT 및 응용
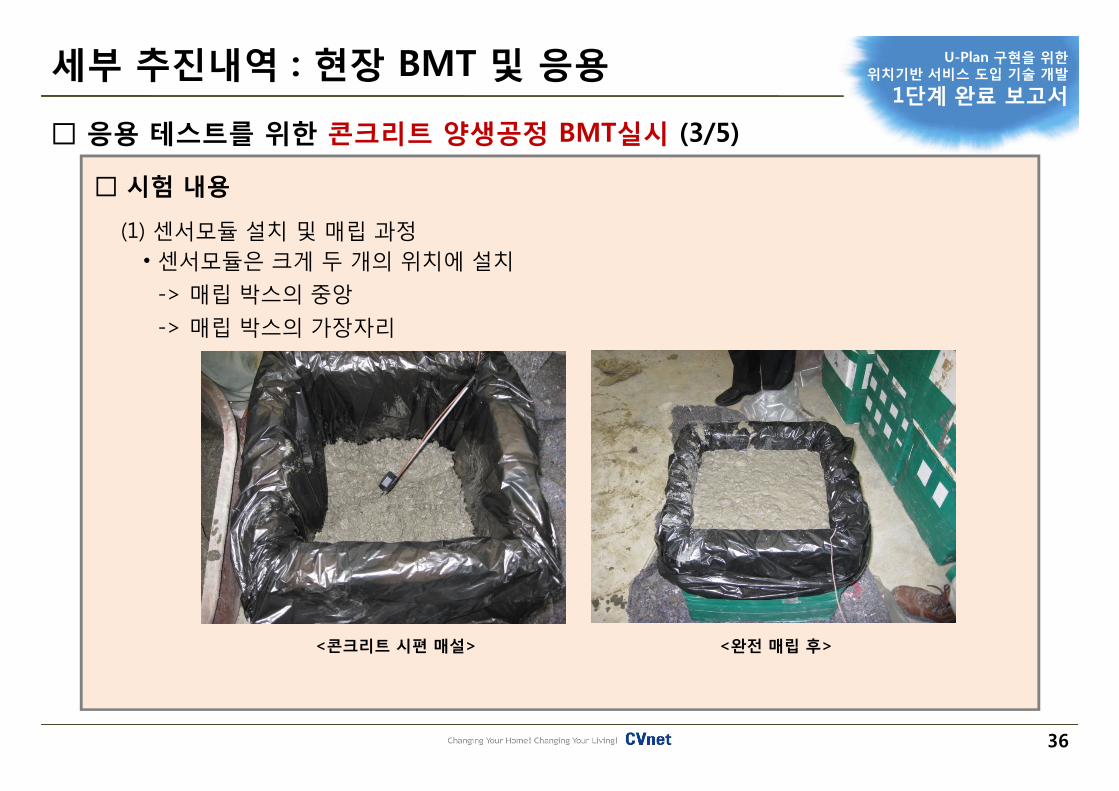
□ 응용 테스트를 위한 콘크리트 양생공정 BMT실시 (3/5)
□ 시험 내용
• 센서모듈은 크게 두 개의 위치에 설치
-> 매립 박스의 중앙
-> 매립 박스의 가장자리
(1) 센서모듈 설치 및 매립 과정
<콘크리트 시편 매설> <완전 매립 후>
36
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 현장 BMT 및 응용
□ 응용 테스트를 위한 콘크리트 양생공정 BMT실시 (4/5)
□ 시험 결과
(1) 무선 네트워크 통신 가능 여부
• 일반적으로 굳지 않은 콘크리트는 수분을 다량 함유하고 있어 통신이 어려움.
-> 본 실험을 통해 일반적인 ZigBee 파워로 15cm 정도의 굳지 않은 콘크리트는 통신 가능함
-> 그러나 라우터의 위치에 따라 일부 센서의 통신 데이터가 전송되지 않는 것으로 보아,
더 두꺼운 콘크리트는 전파 투과 어려움
(2) 온/습도 데이터의 정확성 검증
• 온도의 경우, 그래프 결과에서도 알 수 있듯 기존의 방식과 거의 차이가 없음.
-> 온도는 정확한 값을 계측하였지만, 습도의 경우 비교할만한 다른 계측값이 없어
정량적인 정확도를 알아 내기 어려움.
(이것은 온도가 상승함에 따라 습도가 떨어지는 물리적인 경향으로 추정함.)
37
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 현장 BMT 및 응용
□ 응용 테스트를 위한 콘크리트 양생공정 BMT실시 (5/5)
□ 시험 결과
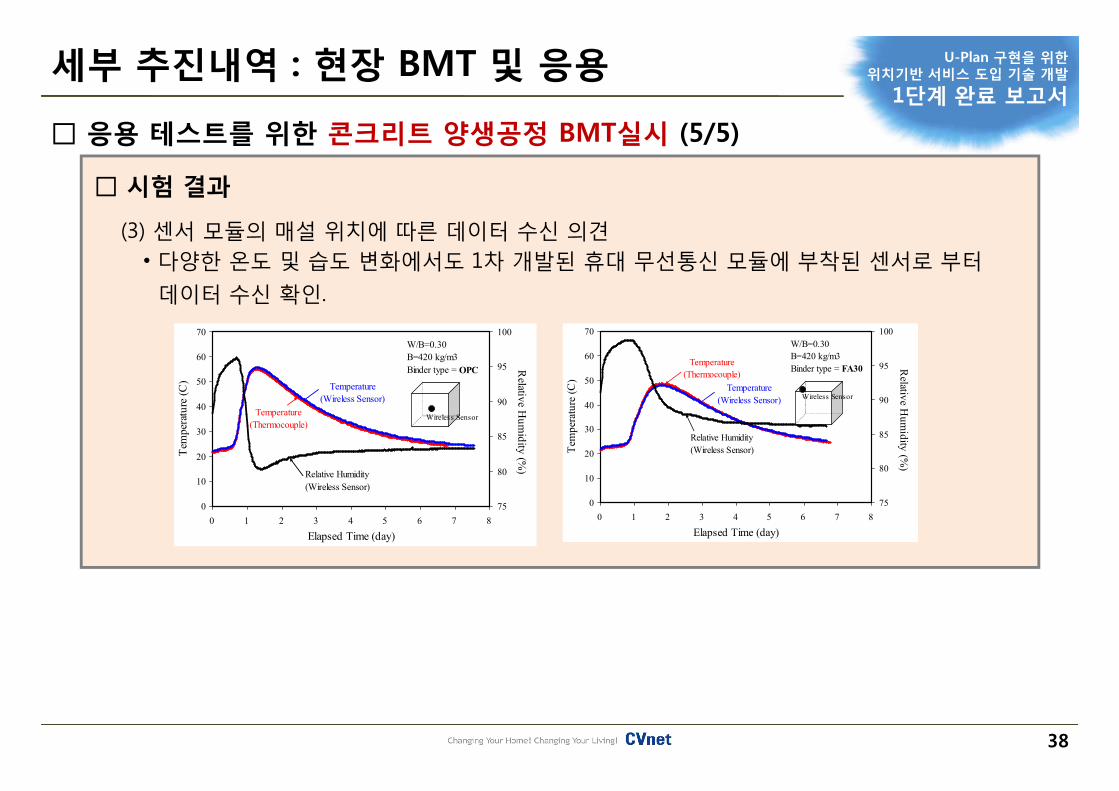
(3) 센서 모듈의 매설 위치에 따른 데이터 수신 의견
• 다양한 온도 및 습도 변화에서도 1차 개발된 휴대 무선통신 모듈에 부착된 센서로 부터
데이터 수신 확인.
0
10
20
30
40
50
60
70
0 1 2 3 4 5 6 7 8
Elapsed Time (day)
75
80
85
90
95
100
Tem
per
atu
re (
C)
Relativ
e Hu
mid
ity (%
)
W/B=0.30
B=420 kg/m3
Binder type = OPC
Relative Humidity
(Wireless Sensor)
Temperature
(Wireless Sensor)
Temperature
(Thermocouple)Wireless Sensor
0
10
20
30
40
50
60
70
0 1 2 3 4 5 6 7 8
Elapsed Time (day)
75
80
85
90
95
100
Tem
per
atu
re (
C)
Relativ
e Hu
mid
ity (%
)
W/B=0.30
B=420 kg/m3
Binder type = FA30
Relative Humidity
(Wireless Sensor)
Temperature
(Wireless Sensor)
Temperature
(Thermocouple)
Wireless Sensor
38
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서세부 추진내역 : 결과 요약
□ 무선통신기술 확대적용 결과 요약
□ 시험 결과
39
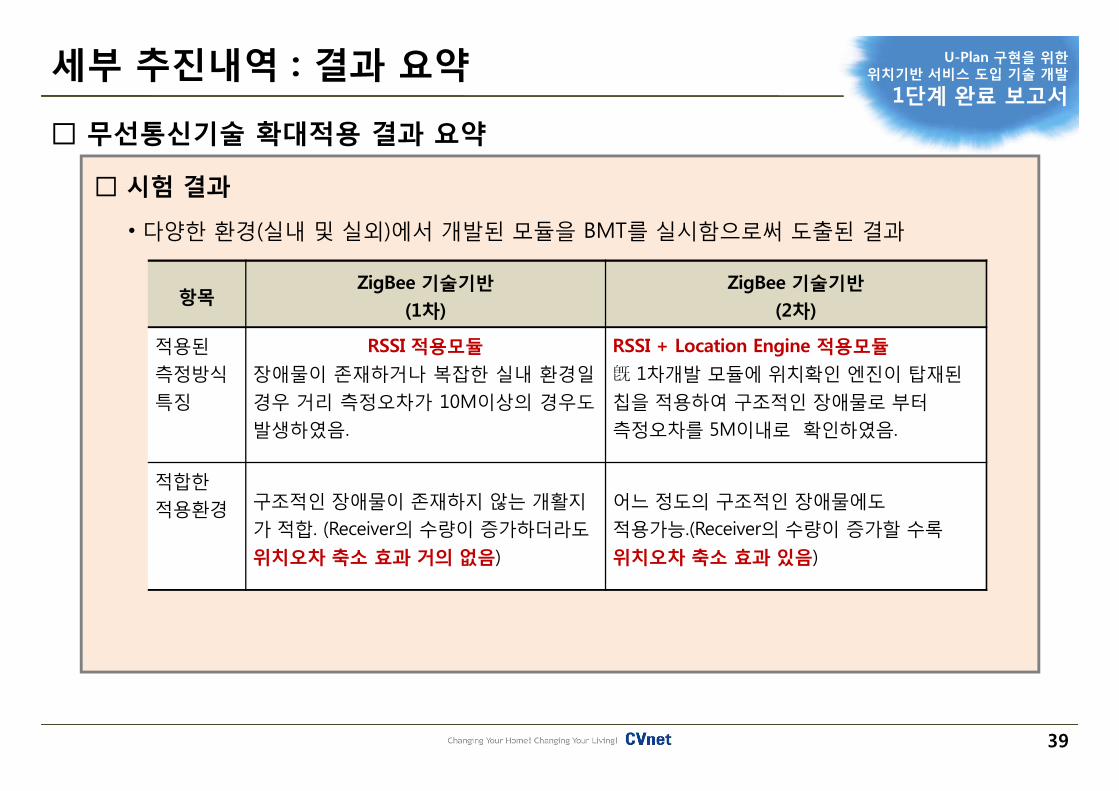
• 다양한 환경(실내 및 실외)에서 개발된 모듈을 BMT를 실시함으로써 도출된 결과
항목ZigBee 기술기반
(1차)
ZigBee 기술기반
(2차)
적용된
측정방식
특징
RSSI 적용모듈
장애물이 존재하거나 복잡한 실내 환경일
경우 거리 측정오차가 10M이상의 경우도
발생하였음.
RSSI + Location Engine 적용모듈
旣 1차개발 모듈에 위치확인 엔진이 탑재된
칩을 적용하여 구조적인 장애물로 부터
측정오차를 5M이내로 확인하였음.
적합한
적용환경 구조적인 장애물이 존재하지 않는 개활지
가 적합. (Receiver의 수량이 증가하더라도
위치오차 축소 효과 거의 없음)
어느 정도의 구조적인 장애물에도
적용가능.(Receiver의 수량이 증가할 수록
위치오차 축소 효과 있음)
U-Plan 구현을 위한위치기반 서비스 도입 기술 개발
1단계 완료 보고서
감사합니다.
40








![펀드투자정보쉽게찾는방법요약[]cfs4.tistory.com/upload_control/download.blog?fhandle=...-1-펀드투자정보쉽게찾는방법요약[] 펀드 가입전 펀드투자기본정보](https://img.pdfslide.tips/doc/110x75/5e5089b291101460b207f4cb/eoeeeoeeeecfs4-1-eoeeeoeeee.jpg)


![게임기획서표준양식cfs9.tistory.com/upload_control/download.blog?fhandle... · • 게임전문가위원회 – kgda의협력으로[게임전문가위원회] 발족 – 게임전문가위원14명으로구성](https://img.pdfslide.tips/doc/110x75/5f0f6a577e708231d4440c6f/eoeeoeoecfs9-a-eoeeeoeoe-a-kgdaeoeeoeeoeeeoeoe.jpg)
![A 한글 [모음익히기] ‘ㅏ’가되도록선을그어보세요.cfs1.tistory.com/upload_control/download.blog?fhandle=YmxvZzU1... · ‘ㅏ’가되도록선을그어보세요](https://img.pdfslide.tips/doc/110x75/5e229a87f64977495c382cb0/a-oee-eoee-aaeeeeeecfs1-aaeeeeee.jpg)