Embed Size (px)
Citation preview

Magn Reson Mater Phy (2010) 23:187–195DOI 10.1007/s10334-010-0217-8
RESEARCH ARTICLE
On the design of filters for fourier and oSVD-based deconvolutionin bolus tracking perfusion MRI
Peter Gall · Philipp Emerich · Birgitte F. Kjølby ·Elias Kellner · Irina Mader · Valerij G. Kiselev
Received: 23 April 2009 / Revised: 9 May 2010 / Accepted: 9 May 2010 / Published online: 29 May 2010© ESMRMB 2010
AbstractObject Bolus tracking perfusion evaluation relies on thedeconvolution of a tracers concentration time-courses in anarterial and a tissue voxel following the tracer kinetic model.The object of this work is to propose a method to designa data-driven Tikhonov regularization filter in the Fourierdomain and to compare it to the singular value decomposi-tion (SVD)–based approaches using the mathematical equiv-alence of Fourier and circular SVD (oSVD).Materials and Methods The adaptive filter is designed usingTikhonov regularization that depends on only one parame-ter. Using a simulation, such an optimal parameter that mini-mizes the sum of statistical and systematic error is determinedas a function of the first moment difference between the tissueand the arterial curve and the contrast to noise ratios of theinput data (CNRa in arteries and CNRt in tissue). The per-formance of the method is evaluated and compared to oSVDin simulations and measured data.Results The proposed method yields a smaller flow under-estimation especially for high flows when compared tothe oSVD approach with constant threshold. However, thisimprovement comes to the price of an increased uncertaintyof the flow values. The translation of the Tikhonov regular-
P. Gall (B) · P. Emerich · E. Kellner · V. G. KiselevDepartment of Diagnostic Radiology, Medical Physics,University Medical Center Freiburg, Hugstetterstrasse 55,79106 Freiburg, Germanye-mail: [email protected]
B. F. KjølbyDepartment of Neuroradiology, CFIN, Århus University Hospital,Nørrebrogade 44, Århus, Denmark
I. MaderDepartment of Neuroradiology, University Medical Center Freiburg,Breisacher Strasse 64, 79106 Freiburg, Germany
ization parameter to an adaptive oSVD-threshold is in goodagreement with the literature.Conclusion The proposed method is a comprehensiveapproach for the design of data-driven filters that can be eas-ily adapted to specific needs.
Keywords Magnetic resonance imaging · Perfusion ·Hemodynamics · Deconvolution · Tikhonov regularization ·SVD
Introduction
In order to identify the salvageable tissue in ischemic stokeusing MRI, physiological indices, such as cerebral blood vol-ume (CBV), mean transit time (MTT) or cerebral blood flow(CBF), of cerebral function can be measured using dynamicsusceptibility weighted measurements. For such a measure-ment, an intravascular contrast agent is injected into thepatients arm vein. The injected contrast agent travels throughthe vascular system under the conditions of the human bloodcirculation allowing to probe local hemodynamic parame-ters.
Given a voxel of interest (VOI) in brain tissue where thecontrast agent concentration c(t) is measured together withan arterial contrast agent supply a(t), the dynamic perfusionequation can be represented by the convolution
c(t) = f · R(t) ⊗ a(t) (1)
where the residue function R(t) characterizes the dynamicparameters of tissue at the VOI, and the f denotes the CBF.The central data-processing task in DSC perfusion is to findf · R(t) from measured a(t) and c(t). The boundary condi-tion R(0) = 1 allows a determination of f as soon as R wasfound by a deconvolution of Eq. (1). However, in practice,
123

188 Magn Reson Mater Phy (2010) 23:187–195
where filters are applied to the data, the flow has to be com-puted using the maximum value of R(t).
There are a variety of methods for the determinationof f · R(t) [1–5]. The most commonly used methods arebased on singular value decomposition (SVD) or the Fouriertransform. The originally proposed standard SVD (sSVD)approach [1] has been proven to yield results that depend onthe delay between a(t) and c(t). This dependence vanishesif the circular SVD (oSVD) [2] is applied instead, a methodthat is mathematically equivalent to the Fourier approach [6].
As deconvolution is an ill-posed problem, both approachesrequire a regularization. It has been shown [2,7] that the regu-larization has to be adaptive to the input data used for decon-volution. Wu et al. proposed in [2] that depending on thesignal to noise ratio (SNR) of the input data and SVD decon-volution method, different regularization thresholds have tobe employed. Liu et al. found in [7] an exponential depen-dence of this threshold on the input SNR empirically. Theuse of Tikhonov regularization for sSVD deconvolution thatdepends on only one parameter λ was shown to be [8] supe-rior to the threshold approach. From the simulations in [8]λ = 0.36 is suggested.
The mathematical equivalence of the oSVD and theFourier approach yields the transform (permutation matrix),between the two methods. This tool enables the transfor-mation of the regularization filters. In this work we employTikhonov regularization in the Fourier domain, where wederive a dependance of an optimal regularization parameteron three variables that can be computed from a measuredtime-course: the noise in the arterial input function, the noisein tissue curve and the relative displacement between thetwo curves. The optimization criterion for the regularizationparameter used in this work minimizes the squared sum ofthe systematical and statistical error. The optimum is foundby simulation for noise and displacement ranges as can beexpected in measurements. The so found optimal regulariza-tion is compared exploiting the mathematical equivalence tothe oSVD deconvolution with a single threshold using sim-ulations and measured data.
Materials and methods
Matrix representation
Arising from the tracer dilution theory [1], Eq. (1) can berepresented by a convolution given by:
c(t) = f ·t∫
−∞R(t − τ)a(τ )dτ = f ·
∞∫
0
a(t − τ)R(τ )dτ
(2)
R(t) is causal for a healthy volunteer and is therefore zerofor t < 0. The functions c(t) and a(t) are sampled at Npoints during the bolus passage. For the processing of thosesamples, one has to find an appropriate discretisation of theaforementioned continuous equation:
c(t j
) = �t · f ·N∑
i=1
R(ti ) · a(t j − ti
)(3)
One interpretation of this equation requires a(t j − ti
)to have
2N − 1 components. This range violation can for examplebe avoided by zero filling of a
(t j − ti
), rendering A to be
the (2N − 1) × (2N − 1) matrix:
Ai j ={
a(t j − ti
)0
ifi ≤ ji > j
(4)
The other interpretation is to formulate the process periodi-cally (indices modulo N ). The periodic approach yields theN × N Toeplitz matrix also known as circulant matrix [2]:
Ai j ={
a(t j − ti
)a
(N · �t + (
t j − ti)) if
i ≤ ji > j
(5)
Following either interpretation, Eq. (1) reads in matrix rep-resentation:
�c = f · A · �R (6)
The inversion of the matrix A is the central numerical taskfor the deconvolution of Eq. (1).
SVD
The singular value decomposition is a method to find a leastsquares solution to an overdetermined system of linear equa-tions. In the case of perfusion, the system matrix is square andcould be inverted directly if its condition number allows fornumerical stability. The matrix A is decomposed into threematrices using SVD:
A = U · S · V T (7)
where U and V T are orthogonal matrices and S is diagonal.From this, the inverse of A renders:
A−1 = V · S−1 · U T (8)
For circulant matrices, as met in the circular interpretationof the perfusion equation, U and V are identical. Thus, theresidue function can be expressed as:
f · �R = V · S−1 · U T · �c (9)
The SVD algorithm yields U such that the eigenvalues in Sare sorted in descending order.
123

Magn Reson Mater Phy (2010) 23:187–195 189
Fourier
The convolution in Eq. (1) reads in Fourier representation(denoted by˜):
c(ω) = f · A(ω) · R(ω) (10)
In order to compare to the SVD the Fourier transform of afunction vector �v is represented by the unitary matrix F :
�v = F · �v (11)
with Fkl = ei ·ωk tl
Applying this to the discrete perfusion Eq. (6) yields:
⇔ F · �c = f · F · A · F−1 · F · �RAs convolutions turn to be point-wise multiplications underFourier transform, the matrix
D := F · A · F−1 (12)
is diagonal. In this representation, R reads:
f · �R = F−1 · D−1 · F · �c (13)
Equivalence and filter transform
Since the diagonal form of a matrix is unique, the matricesS from oSVD and D are equivalent up to a permutation P .
S = P · D (14)
The filters can be transformed using P that sorts the spec-trum’s amplitudes in descending order. Thus, given an oSVDFilter Hsvd the Fourier domain filter Hfou can be computedby:
Hfou = P−1 · Hsvd (15)
Following the equivalence, the Fourier approach is comparedto oSVD in this work.
Adaptive tikhonov regularization
The inversion of the diagonal matrices in Eq. (9) (S) andEq. (13) (D) is numerically unstable for small eigenvalues.Restricting the solution to eigenvalues above a certain thresh-old, yield a least squares solution in the sense of the costfunction χ2:
χ2 = 1
2
∥∥∥ f · A · �R − �c∥∥∥2
(16)
The use of such a sharp edged threshold filter leads to oscil-lations. Those can be suppressed if χ2 is extended by anadditional penalty term [8–10]:
χ2 =∥∥∥c − f · A · �R
∥∥∥2 + λ2∥∥∥L · f · �R
∥∥∥2(17)
where the matrix L is the penalty (eg. derivative) operatorand λ is a Lagrange multiplier. L is based on prior knowl-edge such as smoothness of the residue function. For thiswork, we consider penalty operators of the form:
L = ∂k
∂tk, (18)
that minimize the kth time derivative which, for k = 2 usedin this work, leads to a suppression of oscillations. The min-imization condition yields:
f · R(ω) = c(ω) · a∗(ω)
a(ω)a∗(ω) + λ2 · ω2k(19)
This corresponds to filtering the noisy residue function withthe filter H :
H = 1
1 + λ2 ω4
a(ω)a∗(ω)
(20)
H is a smooth function of ω. For small frequencies H ≈ 1.For frequencies where the amplitude of the AIF spectrum issmall as well as at high frequencies H ≈ 0.
In Fourier representation, CBF is proportional to the inte-gral over f R(ω), where the width of the spectrum is pro-portional to 1/MTT. Inevitably, the application of H changesthe encountered area of the spectrum which leads to a sys-tematic error. Ideally, the residue function should be zero forfrequencies that are filtered out by H . However, this situationis only true for long MTT. For short MTT, f R(ω) is a widefunction. Furthermore, for values of f R(ω) smaller than thenoise amplitude, statistical error is introduced in the integral.Therefore, a compromise between the noise included in theintegration and the failure to integrate over the whole spec-trum has to be found. In this work, the following parametersare considered to find a compromise:
• CNR in the AIF (CNRa)
• CNR in the tissue curve (CNRt )
• MT T
The dependence on the error sources is included in the regu-larization parameter λ = λ(CNRa, CNRt , MT T ). If stablydefined, CNRa and CNRt can be determined from a giventime-course. The difference �m1 of the first momenta of cand a is a parameter that is closely related to MT T but canbe directly and stably computed from the data, where:
m1 =∫
c(t) · t dt∫c(t) dt
(21)
The replacement of MT T by �m1 leads to the functionλ(CNRa, CNRc,�m1) that only depends on parameters thatcan be determined from measured data.
123

190 Magn Reson Mater Phy (2010) 23:187–195
Optimum criterion
For a given set of parameters CNRa, CNRc and �m1, the sys-tematic and statistical error introduced by a specific choice oflambda was found using a simulation of c(t) and a(t) undervarying noise realizations. For each realization, the CBF wasdetermined yielding the values Fi . The systematic error isdefined as:
Esys = Fmean − Ftrue (22)
where Fmean is the mean of Fi. The statistical error Estd isthe standard deviation of Fi around Fmean. The determinationof an optimal λ(CNRa, CNRc,�m1) requires a definition ofthe relative weighting of the systematical and statistical error.For this work, the cost function χ2 for the optimal λ is chosento be:
χ2(λ) = Esys(λ)2 + Estd(λ)2 (23)
The two errors in χ2 could be weighted differently dependingon the users need.
Contrast to noise ratio
When designing a data driven filter, the filters parametersmust be described using stable characteristics of the givendata. For bolus tracking perfusion, the main interest lies onthe detection of a contrast agent bolus traveling through agiven voxel. A numerically stable description of the dataquality is given by the ratio of the average amplitude c ofthe relaxation time-course during the bolus passage and thenoise amplitude. c can be stably expressed using the twomoments m0 and m2 that are related to the area and width ofthe functions:
c = m0√m2
(24)
where
m0 =∫
c(t) dt (25)
and
m2 =∫
c(t)
m0· t2 dt −
(∫c(t)
m0· t dt
)2
(26)
The contrast to noise ratio (CNR) is defined to be:
CNR = c
σ(27)
where σ is the standard deviation of c(t) around the baseline.For large enough signal to noise ratio (SNR), this definitionof CNR scales with SNR, where SNR is defined as the ratioof the mean signal during the baseline to the correspondingstandard deviation.
Simulation: optimal regularization parameter
In order to find the dependence of λ on its parameters, a simu-lation covering the parameter ranges found in measurementshas to be performed. For each considered combination ofCNRa, CNRt and �m1 χ2(λ) is determined from 1024 noiserealizations. Instead of �m1, MTT is varied whereafter �m1
is computed from the time-courses.For the simulation of the time-courses, gamma variate
functions were used for the AIF:
a(t) ={
C0 · (t − t0)α · e−(t−t0)/β
0if
t ≥ t0otherwise
(28)
Following [1] the parameters were set to α = 3.0 and β =1.5. In order to simulate time-courses as obtained from DSCperfusion measurements, t0 was set to 10 s. The time-intervalcovered by the simulation was 100 s and the repetition timewas 1.5 s.
The tracer kinetic model requires an individual AIF foreach voxel. However, the evaluation of the perfusion param-eters is commonly performed using a global AIF for a givendataset. In [11] it was shown that this leads to additionaldelay and dispersion between the site where the AIF wasmeasured and a voxel of interest. This delay and dispersioncan be described by a transport function htree [12] assum-ing laminar flow and a scaling rule for the vascular tree. Thedetails of this function can be found in [12]. For this work,the transport function for five generations of the vasculartree was used. The residue function, as modeled in the tracerkinetic model (local AIF), is assumed to be an exponentialfunction:
Rtissue(t) = e−t/MTT (29)
where MT T is the mean transit time. Other residue func-tion shapes are not considered here, although the presentedconcept for filter derivation applies there as well. The totalresidue function then reads:
R = htree ⊗ Rtissue (30)
With this residue function the tracer kinetic equation for theglobal AIF approach can be formulated as stated in Eq. (1).For the simulation white Gaussian noise for 20 < SN R <
200 is added to the signals stis(t) and sa(t) such that the tissuesignal shows a signal drop of 40% and the arterial signal of60% at varying baselines (100 < sb < 800). The CNR wasthen computed following the definition in Eq. (27).
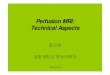
The parameter range used for the simulation is chosenaccording to values found in patient data (see: Fig. 1). λopt
was determined for 10 ≤ CNRt ≤ 60 and 60 ≤ CNRa ≤120 (CNRa = 72 ± 29 in the AIF cluster as described in[13]). CBF is varied between 10ml/100g·min and 90ml/100g·min
in order to cover the physiological range. For each parameter50 equally spaced samples are computed within the range.
123

Magn Reson Mater Phy (2010) 23:187–195 191
0 50 100 1500
0.01
0.02
0.03
0.04
CNR
rela
tive
freq
uenc
y
Fig. 1 Distribution of CNR as defined in Eq. (27) in a measured dataset
Table 1 Parameters of the hyperplane in Eq. (31), as fitted to the sim-ulation
τ1 τ2 τ3 τ4
−0.04 0.03 −0.55 8.50
The simulations are performed under constant CBV =0.04 which relates CBF and MTT by the central volume theo-rem [1]. In order to show the impact of CBV that are differentfrom the one used for the simulation the parameters foundfor CBV = 0.04 were applied to data that were generatedusing different CBV.
Following the exponential dependence of the regulariza-tion on the noise in [7], λopt is approximated by the hyper-plane:
τ1 · CNRa + τ2 · CNRt + τ3 · �m1 + ln(λ) + τ4 = 0 (31)
Simulation: filter performance
In order to compare the performance of the adaptive filter tothe oSVD with a threshold of 0.03, a second simulation atfixed CNRa = 100 and CNRt = 15 is performed at varyingCBF
(10 − 90ml/100g·min
). The concentration time-course
for each realization is performed as described earlier. Foreach CBF, the mean and standard deviation of the estimatedflow from 1024 realizations is computed using the adaptivefilter Table 1 and oSVD with a threshold of 0.03 ([2]).
MRI measurement
A dataset from a different study (young, healthy voluteers)that was approved by the local ethics committee was re-exam-ined in order to illustrate the viability of the method. Thesubject gave informed consent. The measurement was per-formed on a 3 T clinical scanner (TRIO, Siemens, Erlangen,Germany). Images were acquired with a single-shot gradi-ent echo—spin echo sequence with two echo planar read-outs with the echo times TE,G E = 25 ms and TE,SE =
85 ms, TR = 1800 ms, matrix size 88 × 88, 16 slices (slicethickness 4 mm at 25% interslice gap, pixel size 4 × 4 mm2),50 frames. Gd-DTPA (Multihance) at a dose of 0.2 ml per kgbody weight was automatically injected (5 ml/s) followed bya 20 ml saline flush. The contrast injection was started with10 s delay.
Signal processing
The measured time-series can be represented by:
s(t) = s0 · e−�R2(t)·TE (32)
From this the time-course of the relaxation rate change reads:
�R2(t) = − 1
TE· ln
s(t)
s0(33)
Although it is known that the relation between the tracer con-centration and �R2 depends on the tissue composition [14],for simplicity it is assumed that the conditions of the staticdephasing regime hold [15] where the tissue tracer concen-tration is:
c(t) ∝ �R2(t) (34)
In order to rigorously define the tracer kinetic parametersthe first bolus passage in c(t) and a(t) was extracted [16].The deconvolution was performed, using the oSVD and theproposed adaptive filter approach. The arterial input functionwas found automatically using the clustering algorithm givenin [13]. For the determination of CBF, the maximum of thedeconvolved residue function was used.
Results
Simulation: optimal regularization parameter
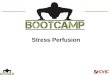
For each configuration of CNRa, CNRt and CBF, the optimalregularization parameter λ was computed by minimization ofχ2 in Eq. (23). An example of χ2(λ) is shown in Fig. 2. Theminimum search is well defined, as too small λ leads to a largestatistical error and too large λ leads to a large systematicalerror.
Using the approximation of linear dependence of ln(λ) onits parameters, a hyperplane was fitted to the data from thesimulation. In Fig. 3, the corresponding plane for CNRa =100 is shown illustrating the quality of the assumption ofa hyperplane. Although a small curvature is observable inthe simulated data, the plane fits the data reasonably. The fityields the values given in Table 1 as parameters to Eq. (31).
123

192 Magn Reson Mater Phy (2010) 23:187–195
0 5 10 15 200
1
2
3
4
5
6x 10
−7
λ in a.u.
erro
r: s
yste
mat
ic2 +
sta
tistic
al2
Fig. 2 The optimal λ is determined as the minimum of χ2 in Eq. (23)
Fig. 3 Dependence of λopt on CNRt and �m1 at 95 < CNRa < 105.The simulated points are approximated by the fitted plane for the deri-vation of λopt
Simulation: filter performance
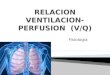
The results of the simulation for the method comparisonare shown in Figs. 4 and 5. The correlation plot in Fig. 4shows that the mean flow calculated using the proposedmethod is closer to the true flow than values obtained byoSVD. This comes to the price of increased uncertainty inhigh flow values. The spectrum of the residue function isvery noisy for high frequencies due to the division by noisysmall numbers in the deconvolution. At constant CBV, highCBF renders significant parts of the residue function spec-trum to the frequencies where the excessive noise occurs.If those spectral parts are considered in order to reducethe systematic error, a greater statistical error is inevita-bly introduced. With decreasing CBF, the spectrum of theresidue function becomes narrower. Thus, the systematicerror caused by a given filter is reduced. The proposedadaptive filter finds the optimal tradeoff with respect toEq. (23). This is reflected in the smaller error at low flowFig. 4.
In order to illustrate the influence of a different CBV com-pared to the one used for the derivation of λopt, this simula-tion was repeated for CBV = 0.02 and CBV = 0.06. Theresults are shown in Fig. 5. The mean flow computed using
0 20 40 60 80 1000
20
40
60
80
100
CNRaif
= 100 CNRtis
= 35
Fig. 4 CBF computed by the oSVD approach (light gray) and by theproposed approach (dark gray) versus the true CBF used in the simula-tion. The error bars mark one standard deviation around the mean. Theblack dotted line marks the identity
0 20 40 60 80 1000
20
40
60
80
100
CNRaif
= 100 CNRtis
= 35
Fig. 5 The mean CBF computed by the oSVD approach (light gray)and by the proposed approach (dark gray) versus the true CBF used inthe simulation for CBV = 0.4 (solid line), CBV = 0.2 (dashed-dottedline), CBV = 0.6 (dashed line). The black dotted line marks the identity
the proposed method is always closer to the true flow thanthe values computed using oSVD. At given CBF, a decreaseof CBV also renders significant parts of the residue func-tion spectrum to the frequencies where the excessive noiseoccurs, resulting in an increased underestimation of CBF forsmall CBV.
Method comparison using in vivo data
In order to compare the performance of the proposed methodto the oSVD at constant threshold (0.03) in a real situa-tion both methods are applied to in vivo data. The AIF wasautomatically found using the algorithm described in [13].An illustration of the deconvolution for one voxel from thisdata is given in Fig. 6. The figure shows the spectra of theAIF and a tissue curve. Furthermore, the proposed filter isshown together with the SVD threshold. The effects of theSVD threshold can be clearly seen exploiting the equivalenceof Fourier and oSVD. At small frequencies, the threshold
123

Magn Reson Mater Phy (2010) 23:187–195 193
−1.5 −1 −0.5 0 0.5 1 1.50
0.2
0.4
0.6
0.8
1
1.2
frequency in a.u.
norm
aliz
ed m
agni
tude
threshold: 0.057663
Fig. 6 Example of normalized FFT-spectra of the AIF (red) and thetissue (green). The optimized filter is plotted in blue
0 0.2 0.4 0.6 0.8 10
0.05
0.1
0.15
0.2
threshold
rela
tive
freq
uenc
y
Fig. 7 Optimal oSVD threshold distribution derived using λopt
corresponds to a sharp edged filter, that introduces oscilla-tions in the time-domain. At high frequencies, the given noiserealization in the AIF can yield amplitudes above the thresh-old. Those frequencies also add oscillations to the residuefunction.
The correlation of the resulting flows is shown in Fig. 7. Ascan be expected, the two methods correlate well for low CBF.The regression line for the lowest 10% of CBF also reflectsthe behavior of the methods already observed in Figs. 4 and5 for high CBF. This behavior is confirmed by the CBF mapsshown in Fig. 8. Note the differences at sites with higherflows.
The equivalence of oSVD and Fourier deconvolution alsoenables a translation of the proposed filter to an oSVD thresh-old. The frequency ωthresh at which the proposed filter dropsbelow 0.95 can be found for every voxel. The ratio betweenthe amplitudes of the AIF spectrum at ωthresh and ω = 0 canbe interpreted as optimal oSVD threshold. The histogramof these values for the complete patient dataset is shown inFig. 9. The expectation value of the histogram is 0.08±0.05,which is in good agreement with the values between 0.03 and0.1 in [2] for the oSVD.
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
CBF from oSVD in a.u.
CB
F fr
om T
ikho
nov
in a
.u.
Fig. 8 Correlation between CBF computed with oSVD at a thresholdof 0.03 to CBF obtained from the proposed method. The black line indi-cates the identity. The green line is the least squares regression line tothe lowest 10% of CBF values
Discussion
A data driven, Tikhonov regularization–based filter for thedeconvolution required in DSC perfusion processing wasderived. The filter was applied to simulated and measureddata and compared to the results of oSVD deconvolutionwith a constant threshold. The rationale of the comparisonis given by the equivalence of Fourier and SVD decon-volution if block-circulant matrices are used to describethe tracer kinetics. Being a permutation matrix, the filtertransform illustrates how oscillations can be introduced byapplication of threshold filters in the SVD approach. Localmaxima of the AIF spectrum at the level of the thresholdcause the permutation to be nontrivial in this region. If theslope of the filter is nonzero at those points, discontinu-ities are introduced by the permutation causing the oscil-lations.
The dependence of the regularization parameter onCNRa, CNRt and �m1 was assumed to be exponential. Thisapproximation is supported by Fig. 3 as well as by the resultsobtained by Liu et al. in [17]. However, Fig. 3 shows notice-able deviations from this behavior at the interval boundaries.To account for that, a higher order correction should be con-sidered in the future.
One could heuristically argue that the estimated flow val-ues could be corrected using a global lookup-table found bysimulations where the true flow is known. However, such alookup-table cannot be global. This can be seen for examplein the dependence of the optimal regularization parameteron all of its variables. A local lookup-table could be gener-ated by using the simulated data instead of the hyperplanefitted to this data as used in this work. Here, the quality ofthe exponential assumption mentioned earlier encourages thenumerically more efficient use of the hyperplane equation.
Strictly, the presented filter is only optimal for the sim-ulated case at CBV = 0.04 as also considered in [2]. The
123

194 Magn Reson Mater Phy (2010) 23:187–195
Fig. 9 CBF maps of thepresented data as computedusing oSVD (left) and theproposed method (right)
results show, that a deviation of CBV from this value stillleads to an improved CBF estimation as compared to oSVDwith a constant threshold. At low CBV, the low CNR requiresa low cut-off frequency of the filter. This naturally leads toan underestimation of CBF for small CBV. For high CBV,the filter is more adaptive to deviations from the simulationsetup, as CBV is a parameter of CNRt and CNRa.
Using the presented method leads to a smaller underes-timation of the true flow values than standard methods. Byconsideration of the systematic error in the cost function thestatistical error in the result is automatically increased. Thismay not be convenient if quantitative flow values are notrequired as often the case in clinical applications. However,the relative scaling between two regions has to be preserved.The presented work provides the means to design a cost func-tion according to the users requirements.
In [2] Wu et al. proposed the usage of a block-circulantmatrix for the SVD with an adaptive threshold. In theapproach followed therein the systematic error and oscilla-tory index are minimized at the same time, where the oscil-latory index is the first derivative operator instead of thesecond used in the approach presented here. The perspec-tive taken from the Fourier transform suggests that the sharpedged cut-off filters generally used in SVD approaches leadto oscillations, which can be easily avoided if smooth filtersare applied. Those filters can be designed using the approachpresented here. The regularization threshold found in thiswork is in good agreement with the results found in [2].
Noise adaptive filters for in SVD are designed by simula-tion of time-courses without recirculations. Recirculations,however, introduce a side peak in the spectrum at the fre-quency set by the occurrence of the second bolus in compar-ison with the first bolus. In Fourier representation one canunderstand, that a nontrivial permutation of a smooth filterleads to a non-smooth filter that introduces oscillations in thetime-domain.
One limit to the general applicability of the current workis the assumption of an exponential residue function in thetissue. The exponential model was chosen because it assumes
the vasculature to be a single well-mixed compartment. Anadditional convolution that describes the effects of the vascu-lar tree between the site where the AIF was measured and thetissue was applied to the residue function as defined by thetracer kinetic equation. Thus, the simulations better reflectthe situation met during the evaluation of measured data.
Conclusion
In conclusion, the proposed method is a comprehensiveapproach for the design of data-driven filters that can be easilyadapted to specific needs. The specific choice of the optimi-zation criterion used in this work show an improvement in thesystematic error in the estimated flow as compared to oSVDat a constant threshold.
References
1. Østergaard L, Weisskoff RM, Chesler DA, Gyldensted C, RosenBR (1996) High resolution measurement of cerebral blood flowusing intravascular tracer bolus passages. Part I: mathemati-cal approach and statistical analysis. Magn Reson Med 36(5):715–725
2. Wu O, Østergaard L, Weisskoff RM, Benner T, Rosen BR,Sorensen AG (2003) Tracer arrival timing-insensitive techniquefor estimating flow in MR perfusion-weighted imaging using sin-gular value decomposition with a block-circulant deconvolutionmatrix. Magn Reson Med 50(1):164–174
3. Salluzzi M, Frayne R, Smith MR (2005) An alternative viewpointof the similarities and differences of SVD and FT deconvolu-tion algorithms used for quantitative MR perfusion studies. MagnReson Imaging 23(3):481–492
4. Koh TS, Wu XY, Cheong LH, Lim CCT (2004) Assessment ofperfusion by dynamic contrast-enhanced imaging using a decon-volution approach based on regression and singular value decom-position. IEEE Trans Med Imaging 23(12):1532–1542
5. Wirestam R, Andersson L, Ostergaard L, Bolling M, Aunola JP,Lindgren A, Geijer B, Holtås S, Ståhlberg F (2000) Assessmentof regional cerebral blood flow by dynamic susceptibility contrastMRI using different deconvolution techniques. Magn Reson Med43(5):691–700
123

Magn Reson Mater Phy (2010) 23:187–195 195
6. Sirovich L (1988) Introduction to applied mathematics. Springer,Berlin
7. Liu H, Pu Y, Liu Y, Nickerson L, Andrews T, Fox PT, GaoJ (1999) Cerebral blood flow measurement by dynamic con-trast MRI using singular value decomposition with an adaptivethreshold. Magn Reson Med 42:167–172
8. Calamante F, Gadian DG, Connelly A (2003) Quantification ofbolus-tracking MRI: improved characterization of the tissue res-idue function using Tikhonov regularization. Magn Reson Med50(6):1237–1247
9. Alsop D, Schlaug G (2001) The equivalence of SVD andFourier deconvolution for dynamic susceptibility contrast analysis.In: Proceedings of International Society for Magnetic Resonancein Medicine. p 1581
10. Sourbron S, Luypaert R, Van Schuerbeek P, Dujardin M,Stadnik T (2004) Choice of the regularization parameter for perfu-sion quantification with MRI. Phys Med Biol 49(14):3307–3324
11. Calamante F, Morup M, Hansen LK (2004) Defining a local arte-rial input function for perfusion MRI using independent componentanalysis. Magn Reson Med 52(4):789–797
12. Gall P, Petersen E, Golay X, Kiselev V (2008) Delay and dispersionin DSC perfusion derived from a vascular tree model predicts aslmeasurement. In: Proceedings of 16th Annual Scientific MeetingInternational Society for Magnetic Resonance in Medicine. p 627
13. Mouridsen K, Christensen S, Gyldensted L, Ostergaard L(2006) Automatic selection of arterial input function using clus-ter analysis. Magn Reson Med 55(3):524–531
14. Kiselev VG (2001) On the theoretical basis of perfusion measure-ments by dynamic susceptibility contrast MRI. Magn Reson Med46:1113–1122
15. Yablonskiy DA, Haacke EM (1994) Theory of NMR signal behav-ior in magnetically inhomogeneous tissues: the static dephasingregime. Magn Reson Med 32(6):749–763
16. Gall P, Mader I, Kiselev VG (2009) Extraction of the first boluspassage in dynamic susceptibility contrast perfusion measure-ments. Magn Reson Mater Phy 22(4):241–249
17. Liu C, Bammer R, Acar B, Moseley M (2004) Characterizing non-Gaussian diffusion by using generalized diffusion tensor. MagnReson Med 51:924–937
123