Embed Size (px)
DESCRIPTION
INNOVÁCIÓ ÉS FENNTARTHATÓ FELSZÍNI KÖZLEKEDÉS KONFERENCIA Budapest, 2008. szeptember 3-5. Útmenti objektumok GPS és videó alapú felmérése Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésautomatikai Tanszék. Péter Tamás, Bécsi Tamás, Aradi Szilárd. Cél: - PowerPoint PPT Presentation
Citation preview
1/13
Pét
er T
amás
, Béc
si T
amás
, Ara
di S
zilá
rdINNOVÁCIÓ ÉS FENNTARTHATÓ FELSZÍNI
KÖZLEKEDÉS KONFERENCIA
Budapest, 2008. szeptember 3-5.
Útmenti objektumok GPS és videó alapú felmérése
Budapesti Műszaki és Gazdaságtudományi Egyetem
Közlekedésautomatikai Tanszék
2/13
Cél:
– Egy olyan rendszer építése, amely kamera, hang és GPS adatok felhasználásával segíti az adatgyűjtést.
– Kutatás-fejlesztés a
keretein belül
Motiváció:
– A közút kezelőjének nyilvántartást kell vezetnie a közutak:• Műszaki,• Minőségi,• Forgalmi adatairól,
illetve• Közúti jelzésekről
stb.
Cél
ok, m
otiv
áció

3/13
Mérőrendszer FeldolgozórendszerGPS adatbázisVideó-adatbázisAdatbázis
Ren
dsze
rele
mek
4/13
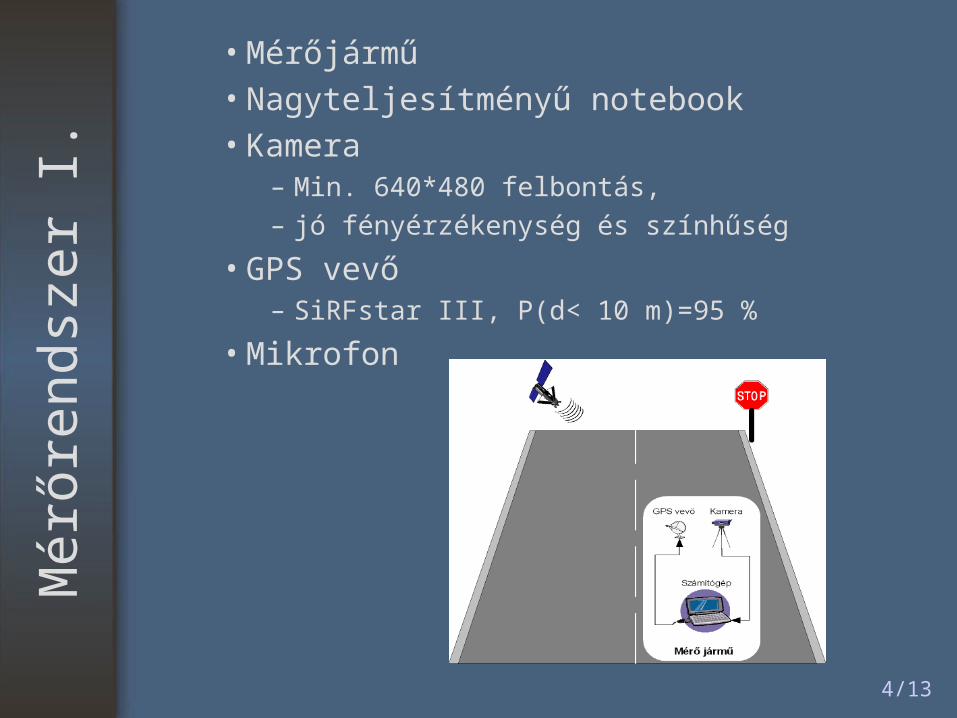
• Mérőjármű• Nagyteljesítményű notebook • Kamera
– Min. 640*480 felbontás, – jó fényérzékenység és színhűség
• GPS vevő – SiRFstar III, P(d< 10 m)=95 %
• Mikrofon
Mér
őren
dsze
r I.
5/13
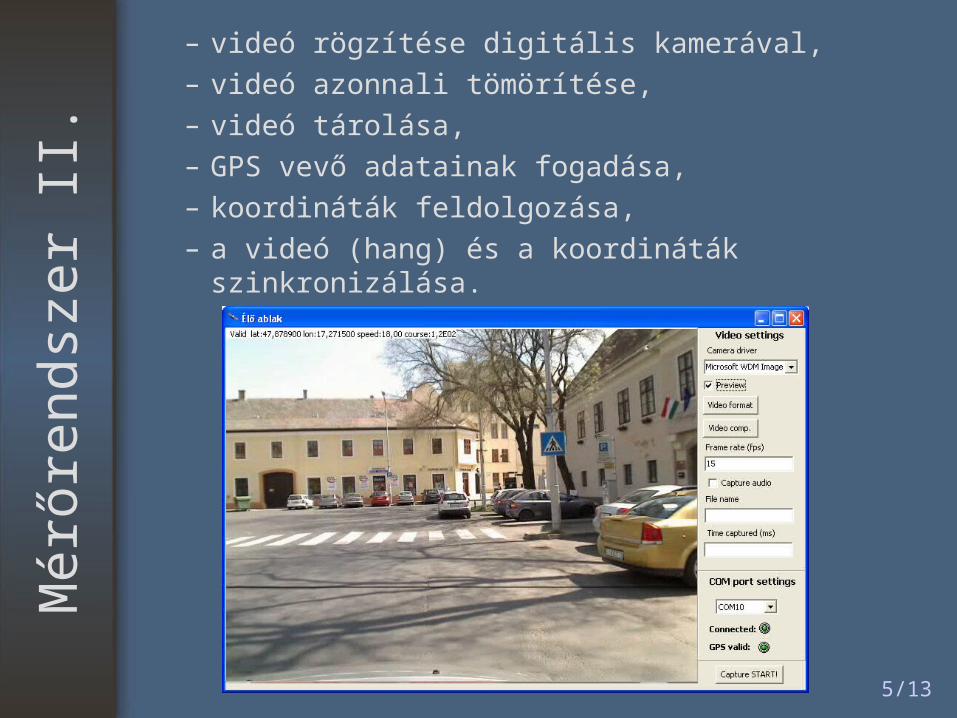
– videó rögzítése digitális kamerával,– videó azonnali tömörítése,– videó tárolása,– GPS vevő adatainak fogadása,– koordináták feldolgozása,– a videó (hang) és a koordináták
szinkronizálása.
Mér
őren
dsze
r II
.
6/13
– Videó lejátszása,– GPS adatok felolvasása,– GPS adatok szinkronizálása a
videóhoz,– Adatbázis-kapcsolat,– Útmenti objektumok adatainak
tárolása,– Térképes megjelenítés,– Manuális feldolgozás támogatása,– Automatikus feldolgozás támogatása.K
iért
ékel
ő re
ndsz
er I
.
7/13
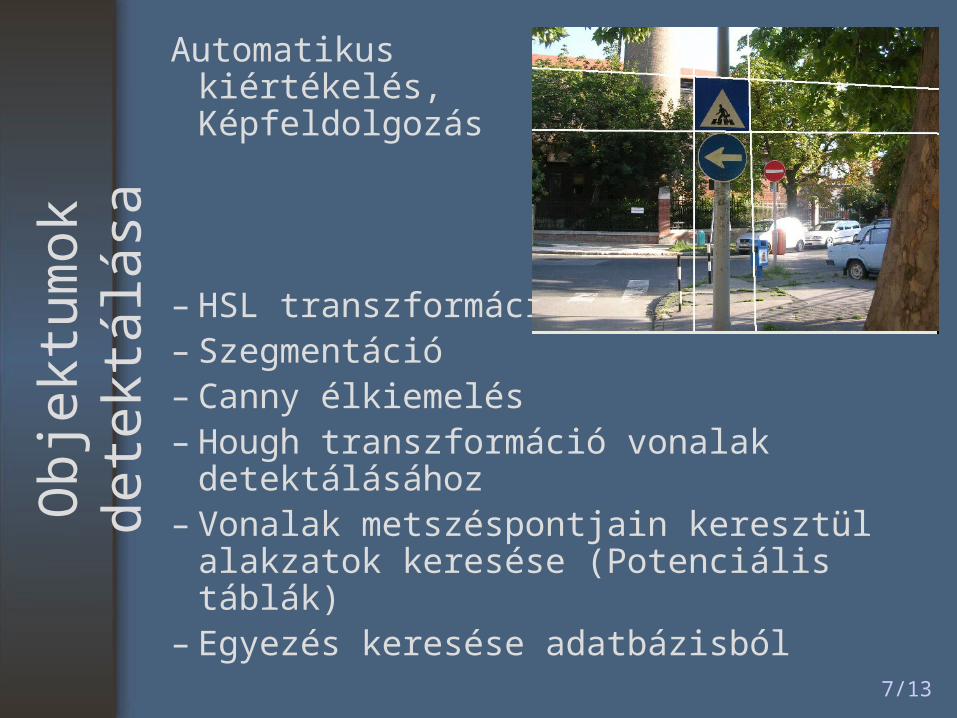
Automatikus kiértékelés,Képfeldolgozás
– HSL transzformáció– Szegmentáció– Canny élkiemelés– Hough transzformáció vonalak
detektálásához– Vonalak metszéspontjain keresztül
alakzatok keresése (Potenciális táblák)– Egyezés keresése adatbázisból
Obj
ektu
mok
det
ektá
lása
8/13
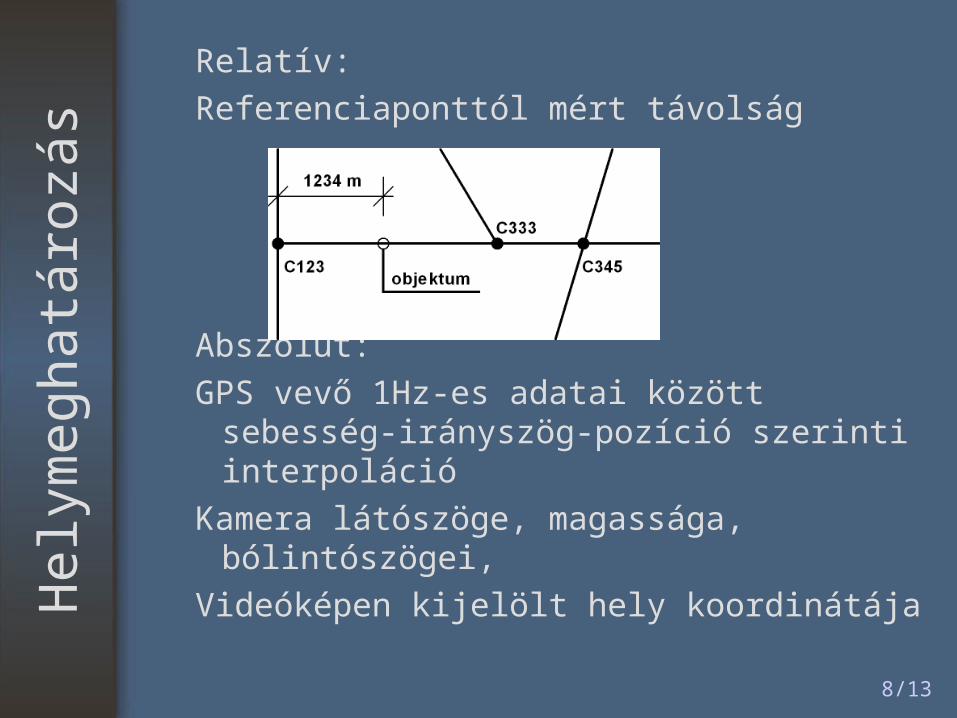
Relatív:Referenciaponttól mért távolság
Abszolút:GPS vevő 1Hz-es adatai között
sebesség-irányszög-pozíció szerinti interpoláció
Kamera látószöge, magassága, bólintószögei,
Videóképen kijelölt hely koordinátája
Hel
ymeg
hatá
rozá
s
9/13
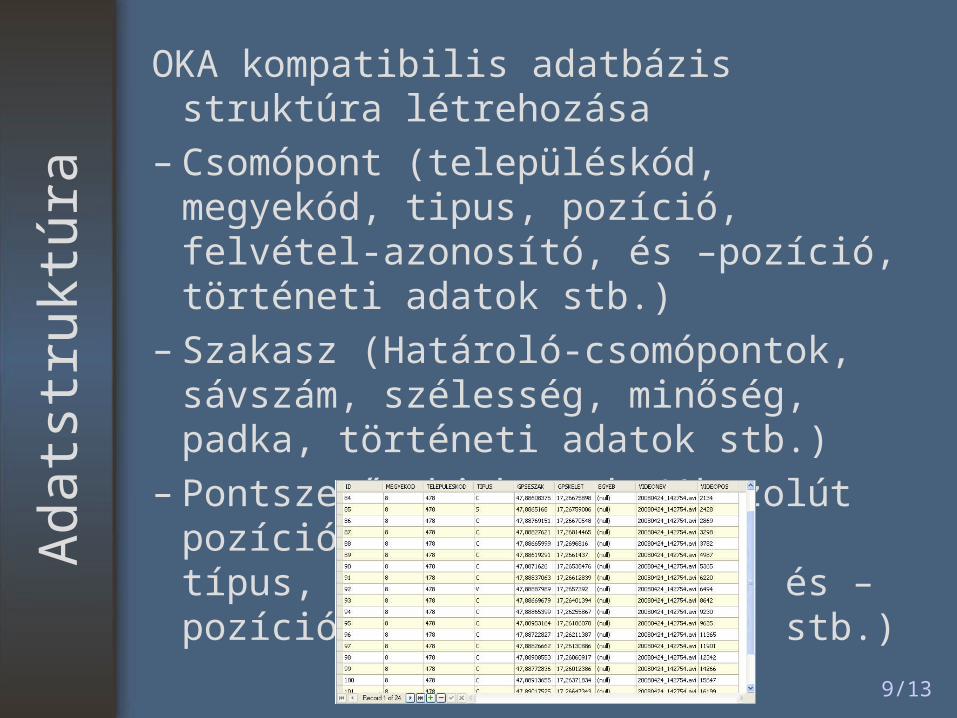
OKA kompatibilis adatbázis struktúra létrehozása
– Csomópont (településkód, megyekód, tipus, pozíció, felvétel-azonosító, és –pozíció, történeti adatok stb.)
– Szakasz (Határoló-csomópontok, sávszám, szélesség, minőség, padka, történeti adatok stb.)
– Pontszerű objektumok (Abszolút pozíció, szakaszi pozíció, típus, felvétel-azonosító, és –pozíció, történeti adatok, stb.)
Ada
tstr
uktú
ra
10/13
– GUI felület– Videólejátszó, (segédrács)
• Lejátszás előre-hátra• Objektumhoz ugrás
– Csomópont, – Pontszerű adat
– Térképi megjelenítés, • beépített browser, • Javascript• Google Maps API
– Adatbázis-kapcsolat• Oracle Database 10g Express Edition
Fel
dolg
ozós
zoft
ver
elem
ek
11/13
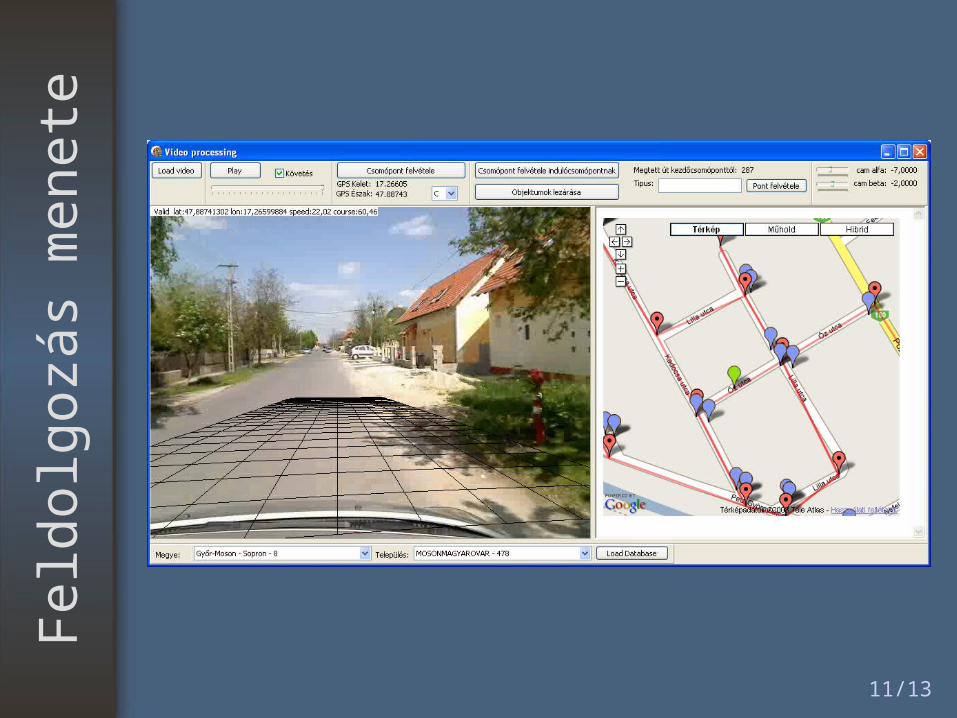
Fel
dolg
ozás
men
ete

12/13
Pró
bam
érés
Mosonmagyaróvár, 2008-04-24
• Tapasztalatok:– Kameraérzékenység fényviszonyokra– GPS pontossága 5m-en belül– Egy kamera használata esetén néhány
objektum nehezen észlelhető
13/13
– DGPS (Differenciális GPS) használata, ami szubméteres pontosságú pozíció-meghatározást tesz lehetővé
– Változáskövetés, történeti adatokon keresztül
– Integráció más szoftverekkel.– Interface egyéb digitális térképekhez– Több kamera használata, „3D látás”
Köszönöm a figyelmet
Bőv
ítés
i leh
etős
égek