Embed Size (px)
Citation preview

PNEUMATIKA i HIDRAULIKA
Predavanja II dio – Pneumatika, pneumatsko upravljanje i
elektropneumatika
Prof.dr.sc. Joško Petrić

PNEUMATIKA
– Uvod• Fizikalne osnove• Priprema stlačenog zraka• Elementi
– Pneumatsko upravljanje– Elektro-pneumatika

Uvod
• Pneumatika – mehanika kompresibilnih fluida. Bavi se uporabom stlačenog plina kao izvora energije.
• Različiti pristupi promatranja slične stvari: – pneumatika (jednodimenzionalni pristup –
koncentrirani parametri («lumped») – aerodinamika (višedimenzionalni pristup - parametri
raspodijeljeni u prostoru) – akustika (i muzika) - proučavanje valnog gibanja i
rezonantnih komora

Uvod, osnovne značajke pneumatike
• Kompresibilnost – najviše određuje pneumatiku – Zrak: 0.2 % kompresije ⇒ prirast ∆p = 0.002 bar
(modul stišljivosti β = V∗∆p / ∆V = 1 bar)– Ulje: 0.2 % kompresije ⇒ ∆p = 24 bar (β = 12.000
bar)– Čelik: 0.2 % kompresije ⇒ ∆p = 4200 bar (β =
210∗104 bar)

Uvod, osnovne značajke pneumatikeOsnovna posljedica ove fizikalne značajke jest da se u fiksnom volumenu ili temperatura ili masa (ili oboje) trebaju promijeniti da se promijeni tlak.
• Primjer 1: otvaranjem ventila opterećeni cilindar neće se pomaknuti odmah. Treba proći neko vrijeme da uđe dovoljno plina da poraste tlak dovoljan da pomakne teret. To je različito od hidraulike, gdje tlak raste praktički odmah kao posljedica čak i najmanjeg otvora ventila – zato je lako realizirati pneumatske elemente sa vremenskim kašnjenjem. «Krutost» pneumatskog aktuatora koji drži neki promjenljivi teret je mala (da bi se to kompenziralo trebao bi biti veliki aktuator, ili veliki servoventil).
• Primjer 2: razlika pneumatskog i hidrauličkog zatvarača vrata.

Uvod, osnovne značajke pneumatike
• Druga posljedica kompresibilnosti je velika mogućnost pohrane energije stlačenog plina.
• Treća posljedica jest veći potreban rad kompresora u usporedbi sa hidrauličkom crpkom.

Uvod, osnovne značajke pneumatike
• Niska viskoznost plina – posljedica je istjecanje (smanjenje efikasnosti), no otpori strujanja su manji (w = 10 – 40 m/s). Također slabije je podmazivanje.
• Niska gustoća – nema «hidrauličkog»udara, malo potrebno vrijeme za ubrzanje plina.
Uvod, osnovne značajke pneumatike
• Skupoća stlačenog zraka kao izvora energije – posljedica kompresibilnosti (veći potreban rad kompresora u usporedbi sa hidrauličkom crpkom); hlađenja zbog izdvajanja kondenzata; te istjecanja.

Uvod: prednosti, nedostaci i primjena
• Prednosti: jednostavnost, jeftini elementi, sigurnost, čistoća, brzina motora, pohrana energije, široko temperaturno područje primjene
• Nedostaci: skupi izvor energije, kompresibilnost• Primjena: automatizacija (zadaci stezanja, pomicanja,
pozicioniranja, pritezanja, itd...). Osim toga primjena kodradnih alata; medicinske tehnike; mobilne pneumatike(kočnice, ovjesi, otvaranje vrata ili zaklopki,..); te za ostale namjene (prenosila i dizala, zračna (u cjevovodima) pošta)
• Poizvođači: SMC, Festo, Knorr-bremse, ..

Uvod: veličine i izrazi
Tlak:• niski (do 1 barabs, mjerna tehnika, regulacija)• normalni (do 10 barabs, obično 6-10;
industrijaka pneumatika) • visoki (preko 10 barabs, npr. 16 bar;
prihvatnice, preše)
Uvod: veličine i izrazi
Volumenski protok:ovisi o tlaku i temperaturi, stoga je potrebno definirati neko normirano stanjefizikalno: TN = 273.15 K (0º C); pN = 1.01325 bar; RN = 287 Nm/kg K; 0% rel. vlažnostiVN = normirani volumen [Nm3], volumen koji zrak zauzima pri normiranom stanju
Uvod: veličine i izrazi
Jednadžba stanja idealnog plina:
TmRpV =

Uvod: veličine i izrazi
Maseni protok kompresibilnog plina kroz prigušnicu:
Gdje je koeficijent istjecanja :TRpAm uv
2ψ=&
≤=
>
−
−=
+
cru
d
cru
d
u
d
u
d
rppa
rppa
pp
pp
z484.0
z1
max
12
ψ
κκ
ψ
κκ
κ

Uvod: veličine i izrazi
• pd Tlak iza prigušnice• u Tlak ispred prigušnice• κ Eksponent adijabate (1.4)• rcr Kritični omjer tlaka (0.528)• R Plinska konstanta 287 J/kg K
• Komentar: za nadzvučnu brzinu protoka zraka, brzina raste, no maseni protok ne!

Uvod: priprema zrakaM
Filter FilterKompresor Hladnjak Susac Spremnik
Potrosaci

Kompresori
KOMPRESORI
DINAMICKI ISTISKIVAJUCI
RADIJALNI AKSIJALNI KLIPNI(CIKLICKI) ROTACIJSKI
JEDNORADNI DVORADNI MEMBRANSKI
LAMELASTI VIJCANI PUZNI PRSTENASTI ROOTS-ov

Kompresori
• Klipni koriste ulje, manje dobavejednoradni
dvoradni
– Membranski bez ulja
• Rotacionio lamelastio vijčani o Root
Dinamički (turbo-kompresori) bez ulja– radijalni – aksijalni za najveće dobave

Kompresori, klipni
jednoradni dvoradni

Kompresori, membranski

Kompresori, lamelasti

Kompresori, vijčani
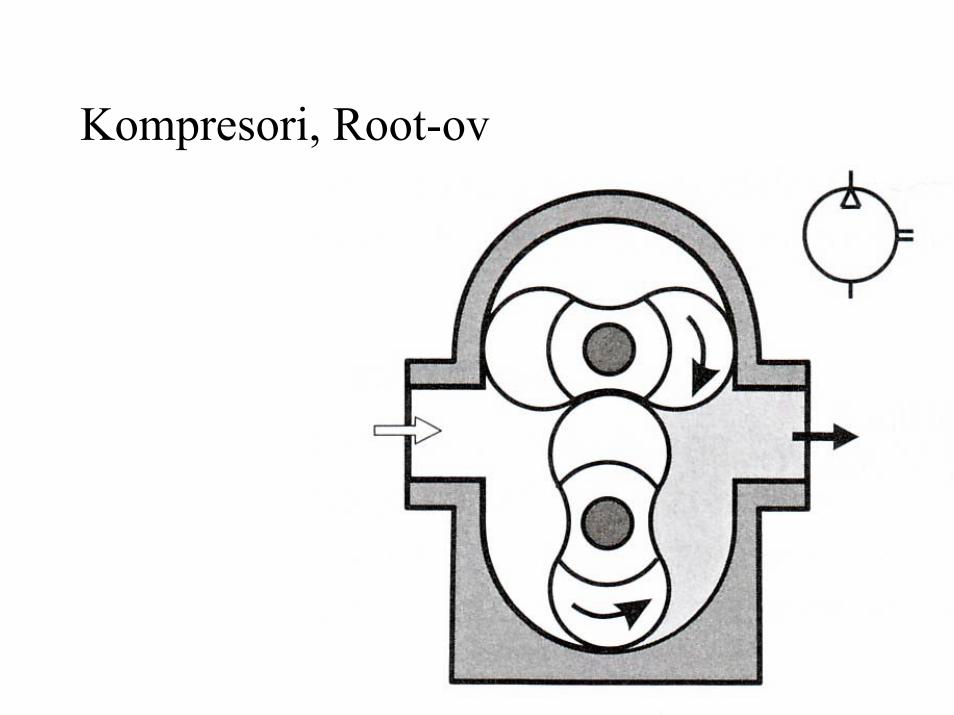
Kompresori, Root-ov
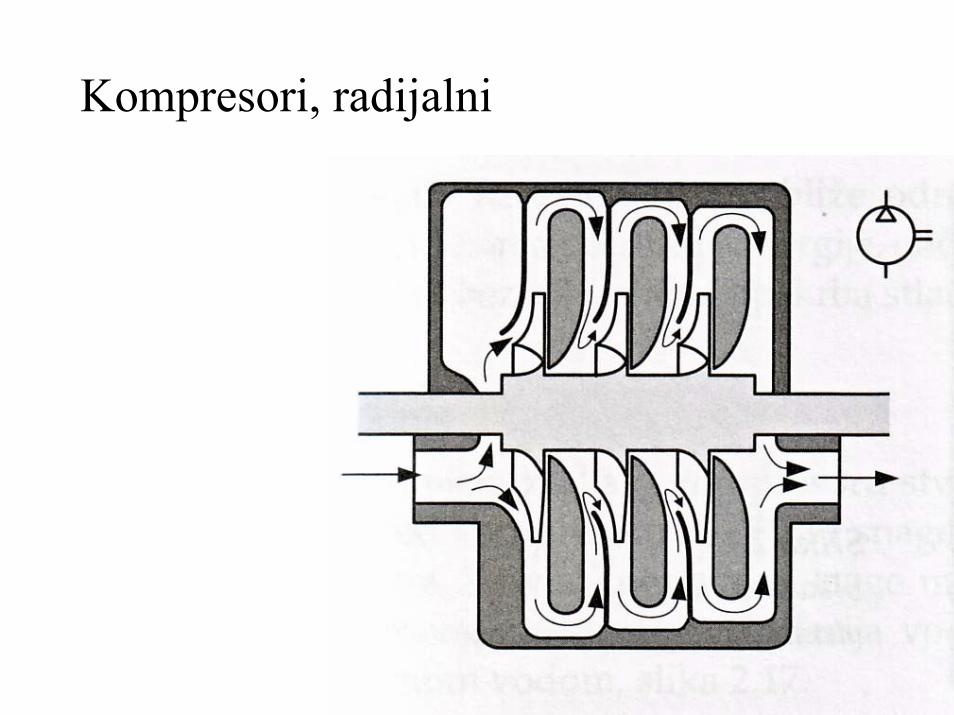
Kompresori, radijalni

Kompresori, aksijalni
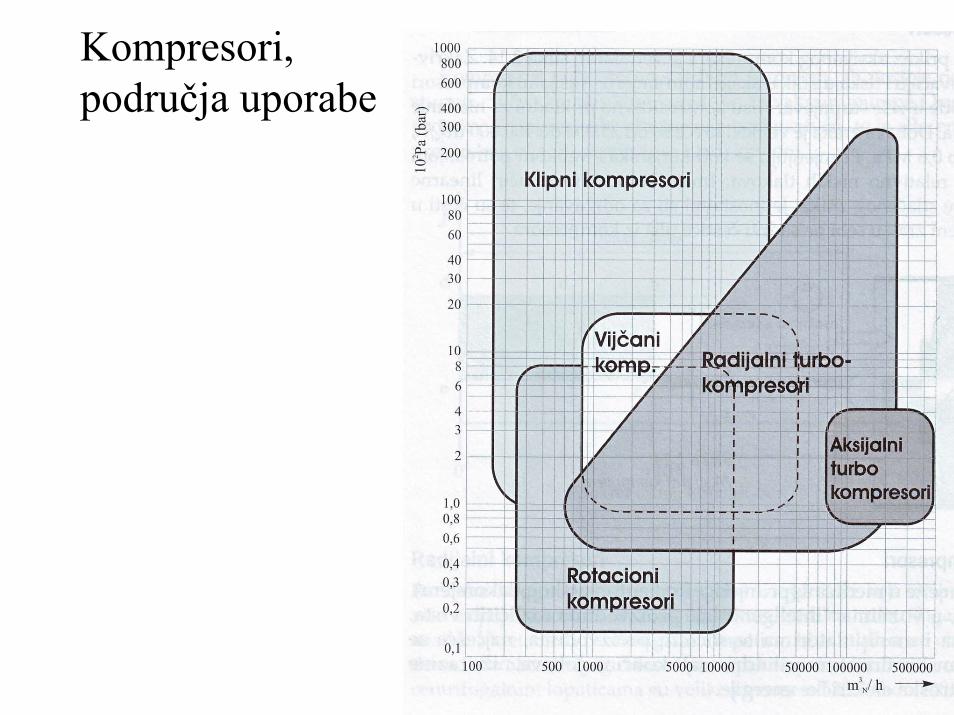
Kompresori, područja uporabe

Cilindri, bez klipnjače
• S rasporom• S trakom• Sa sajlom• magnetski

Cilindri, s rasporom

Cilindri, zakretni

Hvataljke

Razvodnici

Vakumski elementi

Zaporni ventili, naizmjenično zaporni ILI ventil

Zaporni ventili, naizmjenično zaporni ILI ventil, shema

Zaporni ventili, uvjetno zaporni I ventil

Zaporni ventili, uvjetno zaporni I ventil, shema

Zaporni ventili, brzoispusni ventil

Zaporni ventili, brzoispusni ventil, shema

Elementi s vremenskim zatezanjem (kašnjenjem) – kašnjenje pri uključivanju

Elementi s vremenskim zatezanjem (kašnjenjem) – kašnjenje pri isključivanju
Kašnjenje pri uključivanju i isključivanju

PNEUMATSKO UPRAVLJANJE
Podjele upravljanja:• Prema načinu aktiviranja aktuatora:
– Ovisno o volji operatera– Ovisno o putu– Ovisno o vremenu (elementi sa vremenskim
djelovanjem)– Kombinirano

PNEUMATSKO UPRAVLJANJE, podjele
• Prema djelovanju impulsa:– Porastom tlaka (+)– Padom tlaka (-)
• Prema tijeku radnje:– Slijedno upravljanje (slijedeća radnja započima
završetkom prethodne – većina problema)– Programsko upravljanje (prema nekom
programu)

PNEUMATSKO UPRAVLJANJE
• Osnovni problem jest rješavanje tzv. blokirajućeg signala, ili prekrivajućeg signala ili mirujućeg impulsa.
• To je trajni impuls, koji se pojavljuje sa jedne strane glavnog razvodnika, a traje i u momentu kada se sa pojavljuje impuls i sa druge strane, te se razvodnik ne može postaviti u novi položaj. Dakle, takav signal treba eliminirati.
• To je problem kojim se bave metode pneumatskog (ali i električnog) upravljanja.

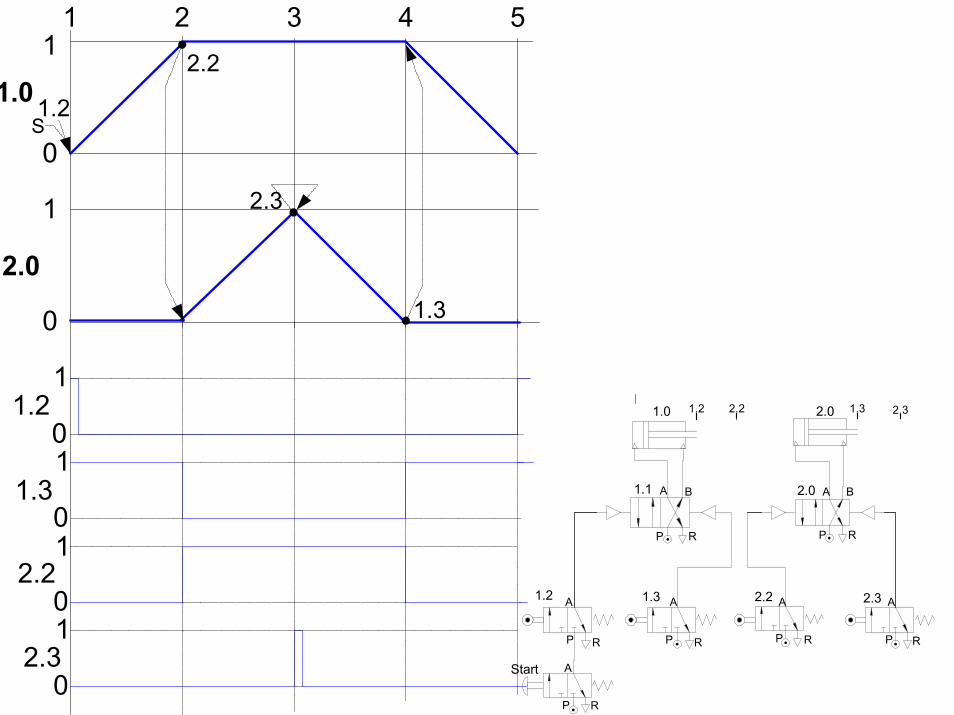
PNEUMATSKO UPRAVLJANJE, Primjer• Zadatak gibanja 2 cilindara dan je dijagramom put-korak (sličan je
dijagram put-vrijeme, koji se isto može koristiti)
1 2 3 4 5
1
1
0
0
1.0
2.0
2.2
2.3
1.3
1.2S

1.0 2.0
1.1
1.2 1.3
2.0
2.2 2.3
1.2 2.2 1.3 2.3
P R
AB
R R RR
R
A
AAAA
PPPP
P
B
Start
R
A
P
1.0 2.0
1.1
1.2 1.3
2.0
2.2 2.3
1.2 2.2 1.3 2.3
P R
AB
R R RR
R
A
AAAA
PPPP
P
B
Start
R
A
P
1 2 3 4 5
1
1
0
0
1.0
2.0
2.2
2.3
1.3
1.2S
1.2
1.3
2.2
2.31
1
1
1
0
0
0
0

PNEUMATSKO UPRAVLJANJE,
Eliminacija blokirajućeg signala vrši se:• Potiskivanjem blokirajućeg signala jačim
(razvodnici sa različitim upravljačkim površinama; dodatavanjem regulatora tlaka)
• Poništavanjem blokirajućeg signala– Korištenjem posebnih elemenata (sa kratkim izlaznim
signalom (VDMA metoda (Verein Deutscher Maschinenbau Anstalten (Udruga
njemačkih strojograđevnih organizacija) ); vremenskih elemenata sa skraćenjem signala)
– Korištenjem posebnih veza među elementima(kaskadne metode; metode korak po korak ili taktne metode, ..)

PNEUMATSKO UPRAVLJANJE, Potiskivanje blokirajućeg signala jačim
• Asimetrične upravljačke površine razvodnika
• Korištenje regulatora tlaka

PNEUMATSKO UPRAVLJANJE,Poništavanje blokirajućeg signala• korištenjem posebnih elementa: VDMA metoda
koristi razvodnike sa zglobnim ticalom sa kotačićem. Takve razvodnike aktivira klipnjača (ili neki drugi pokretni predmet) u jednom smjeru gibanja, dok u drugom smjeru kotačič «preskoči», tj. ne može se aktivirati. Postoje i druge vrste ticala sa preskokom.

PNEUMATSKO UPRAVLJANJE,Poništavanje blokirajućeg signala
• Vremenski elementi sa skraćenjem signala

PNEUMATSKO UPRAVLJANJE,Poništavanje blokirajućeg signala

VDMA metoda
Start
R
A
P
1.0 2.0
1.1
1.2 1.3
2.0
2.2 2.3
1.2 2.2 1.3 2.3
P R
AB
R R RR
R
A
AAAA
PPPP
P
B

Kaskadna metoda upravljanja
• Ideja je “skinuti” sa napajanja one razvodnike(granične prekidače) gdje se pojavljuje blokirajućisignal.
• Koriste se kaskade, odnosno kaskadno napajanje razvodnika
• Više vrsta ove metode

Kaskadna metoda upravljanja, postupak:1. Ispisuje se redoslijed odvijanja programa (+ izvlačenje
klipnjače, – uvlačenje) 2. Redoslijed se upisuje u krugu u smjeru kazaljke sata.
Krug se razdijeli na isječke u kojima se jedan cilindar smije pojavljivati samo jednom. Sveki isječak predstavlja jednu kaskadu. Iznad oznake cilindra upisuje se oznaka razvodnika kojeg taj cilindar aktivira.
3. Svaka kaskada upravlja se pomoću impulsno upravljanog(bistabil) razvodnika 4/2. Kaskadni razvodnici povezani su tako da je samo jedna kaskada može biti aktivna (podtlakom). Broj kaskadnih razvodnika za jedan je manji od broja kaskada.

Kaskadna metoda upravljanja, postupak:4. Svaki cilindar (osim onih koji rade istovremeno) aktivira
po dva 3/2 razvodnika sa ticalom ili kotačićem.5. Posljednji razvodnik 3/2 u kaskadi ne daje impuls za
gibanje slijedećem cilindru, već aktivira slijedeću kaskadu. Prethodna kaskada se isključuje.
6. Prvo aktiviranje gibanja cilindra u kaskadi vrši sedirektno kaskadnim razvodnikom.
7. Razvodnici 3/2 koje aktiviraju cilindri napajani su sa kaskada, a ne direktno sa napajanja. Napajanjem kaskada upravljaju kaskadni razvodnici.

Kaskadna metoda upravljanja, veza između kaskadnih razvodnika
z zz yyy
P P PRRR
AA ABBB
1. k.2. k.3. k.n-ta k.
Impuls posljednjegrazvodnika 2.
kaskade
Impuls posljednjegrazvodnika 1.
kaskade
Impuls posljednjegrazvodnika n-te
kaskade
Impu
ls p
oslje
dnje
gra
zvod
nika
(n-1
)ka
skad
e

Metoda korak po korak (taktna metoda)• Ideja metode jest dovesti napajanje samo na one
razvodnike koji u tom trenutku rade, odnosno dozvoliti pojavu signala samo kada je on potreban.
• Koriste se impulsni (bistabilni) razvodnici,odnosno memorije, te logički elementi.
• Svaki izlaz iz memorije postavlja (set) jedan uvjet za uključivanje narednog koraka, dok drugi uvjet dolazi od graničnog prekidača (3/2 razvodnika).Oba uvjeta idu preko I logičkog elementa, te pokreću slijedeći korak. Ujedno izlaz iz memorije briše (reset) prethodnu memoriju

Metoda korak po korak (taktna metoda)
Q
QSET
CLR
S
R Q
QSET
CLR
S
RQ
QSET
CLR
S
R Q
QSET
CLR
S
R
1. g.p. 4. g.p.3. g.p.2. g.p.
1. k. 4. k.3. k.2. k.
Dakle, svakim novim upravljačkim signalom (koji dolazi od graničnih prekidača,tj. razvodnika 3/2) uspostavlja se novi izlaz, a taj izlaz upravlja kretanjem cilindra(ili više njih ako rade istovremeno) u jednom koraku. I logički element uvjetuje slijedeći korak postojanjem prethodnog, a novopostavljeni izlaz isključuje prethodni.

Metoda korak po korak (taktna metoda)
• Metoda je jednostavna, i temelji se na elementima (taktnim modulima) izrađenim upravo za to. Jedan modul služi za jedan korak, a sastoji se od impulsnog razvodnika kao memorije i logičkog elementa (ili više njih).

Metoda korak po korak (taktna metoda)

A+ B+ B - A -
A Ba1 a2 b1 b2
a2 b2 b1 a1

Metoda korak po korak (taktna metoda),primjer
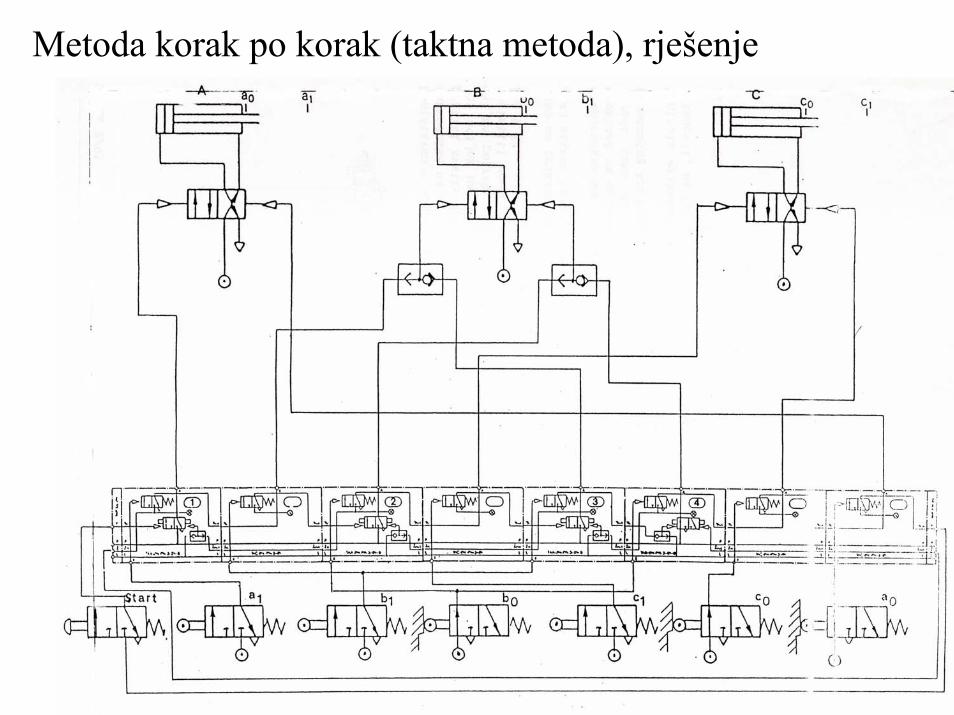
Metoda korak po korak (taktna metoda), rješenje

ELEKTROPNEUMATIKA
• Električki i elektropneumatski osnovni elementi
– Električki elementi za davanje signala
• Kontaktnikontakti:
radni mirni preklopni

• tipkala sa radnim kontaktom ručno aktivirana:
opći simbol pritiskom povlačenjem zakretanjem
• mehanički aktivirani krajnji (granični) prekidači
krajnji prekidač aktiviran ticalom skotačićem

BezkontaktniBezkontaktni senzori su pogodni kada nema na raspolaganju mehaničkog kontakta ili sile za
aktiviranje, ako su teži okolni uvjeti, poput vibracija i udaraca, ako je potrebna veća frekvencija preklapanja, te ako treba duži vijek trajanja.
Bezkontaktni prekidač prema Reed – principu (Reed-relej)

• Induktivni prekidač (senzor ili osjetnik)
samo za metale
• Kapacitivni senzor
za metale i nemetale
Spoj u istosmj. krugu
K#
SIme prip.cil.#

• Optički senzoriPredajnik – prijemnik u odvojenim kućištimaPredajnik i prijemnik u jednom kućištu + reflektorPredajnik i prijemnik u jednom kućištu (predmet je reflektor)

• Električki elementi za obradu signala– Releji
Releji (potprega) su elektromehanički elementi koji se prekapčaju i upravljaju uz mali utrošak energije. Može se smatrati elektromagnetski pogonjenim prekidačem za određenu preklopnu snagu. Koristi se u upravljačkim i regulacijskim namjenama kod postrojenja i strojeva. Prednosti su mu što ima dugi vijek trajanja, nezahtjevno održavanje, ima kratka vremena prekapčanja, te može prekapčati vrlo male, ali i velike struje i napone.An electrically controlled mechanical device that opens and closes electrical contacts when a voltage (or current) is applied to a coil. A relay provides isolation of control signals from switched signals.An electromagnetic switching device.An electrical component used to open and close a circuit.

K1A1
A2
13
14 24
31 4123
32 42

Postoji velik broj izvedbi. Neke od njih su:• Impulsni relej: daljinski upravljani, nakon prestanka upravljačkog impulsa
zadržavaju zauzeti sklopni položaj pomoću mehaničkog zabravljivanja. • Remanentni relej (ili permanentni): sa visokim remanentnim magnetizmom, pa
kotva zadržava položaj i nakon prestanka upravljačkog signala, kao i nakon ispada napona. To je relej sa magnetskim samodržanjem. Isključuje ga negativni impuls.
• Vremenski relej: nakon nekog vremena, koje je podesivo spaja, odnosno odspaja kontakte.

K1C1R1
R2
D1
S116 18
15
tt∆
01
0
1ULAZ S1
IZLAZ 15-18

• Elektropneumatski ventili i pretvornici
2/2 elektromagnetski razvodnik sa ručnim pomoćnim aktiviranjem
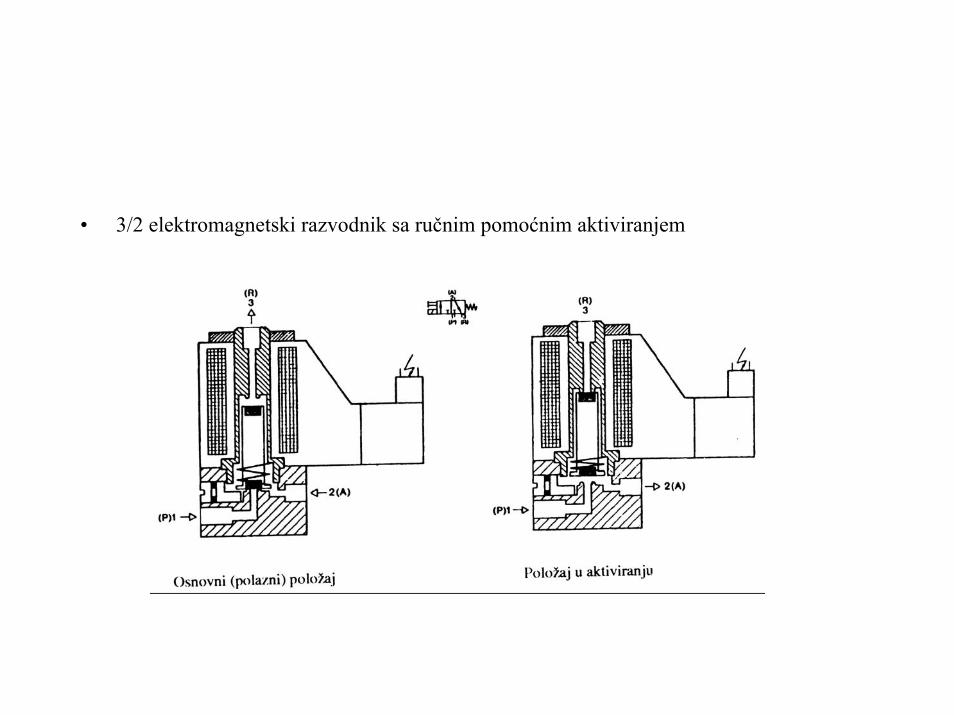
• 3/2 elektromagnetski razvodnik sa ručnim pomoćnim aktiviranjem

• 3/2 elektromagnetski razvodnik sa posrednim upravljanjem

• 4/2 elektromagnetski razvodnik obostrano impulsno upravljan

• Pneumatsko-električki pretvornici signala
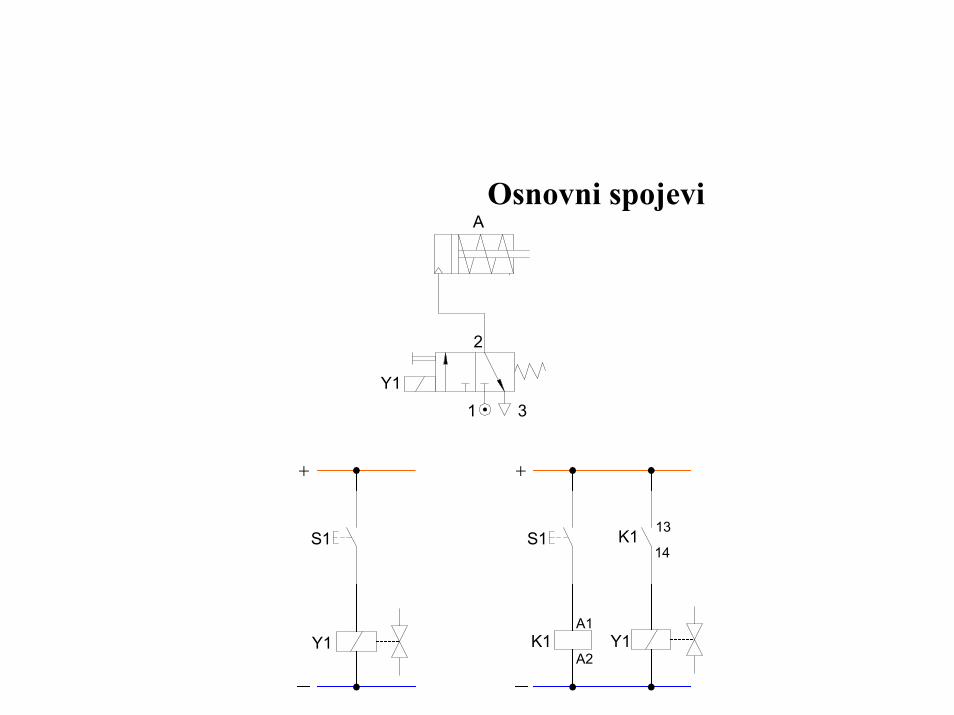
Osnovni spojevi
Y1
Y11
2
3
A
Y1
S1
+ +
S1 K1
K1
13
14
A1
A2
Y1
Y1
1
2
3
A
Y1
S1
+ +
S1 K1
K1
13
14
A1
A2
5
4

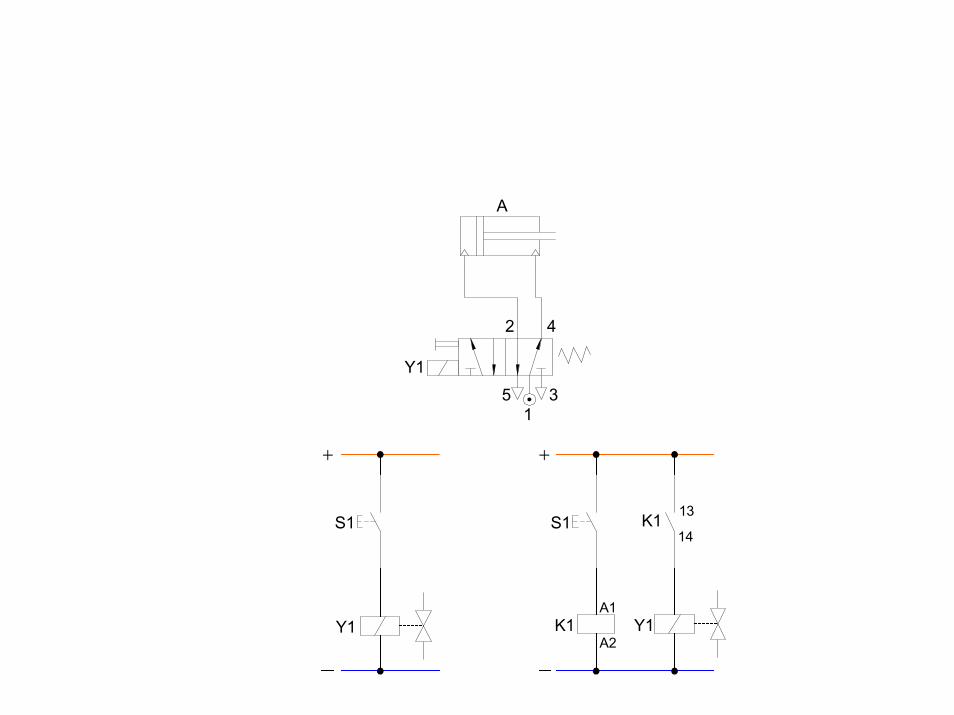
Upravljanje dvoradnim cilindrom bistabilnim razvodnikom
Y1
Y1
1
2
3
A
Y1
S1
+ +
S1 K2
K1
13
14
A1
A2
5
4
Y2
S2
Y2
K1 13
14
Y2
S2
K2A1
A2

Automatsko vraćanje cilindra
Y1
Y1
1
2
3
A
Y1
S1
+ +
S1 K2
K1
13
14
A1
A2
5
4
Y2
S2
Y2
K1 13
14
Y2
S2
K2A1
A2
S2

Serijski i paralelni spoj (logičke funkcije)
x1
+
K1
x2
(Y)
x1 x2
(Y)K1 (Y)K1
I ILI NE
x1

• Pneumatska realizacija jest sa uvjetno zapornim (I – a to može biti i serijski spoj dvaju 3/2 ventila), te naizmjenično zapornim (ILI) ventilima, te dva 3/2 ventila koje tvore negaciju.
Y
x1 x2
1
2
3
x1
Y
2
1 3
Y
x1 x2
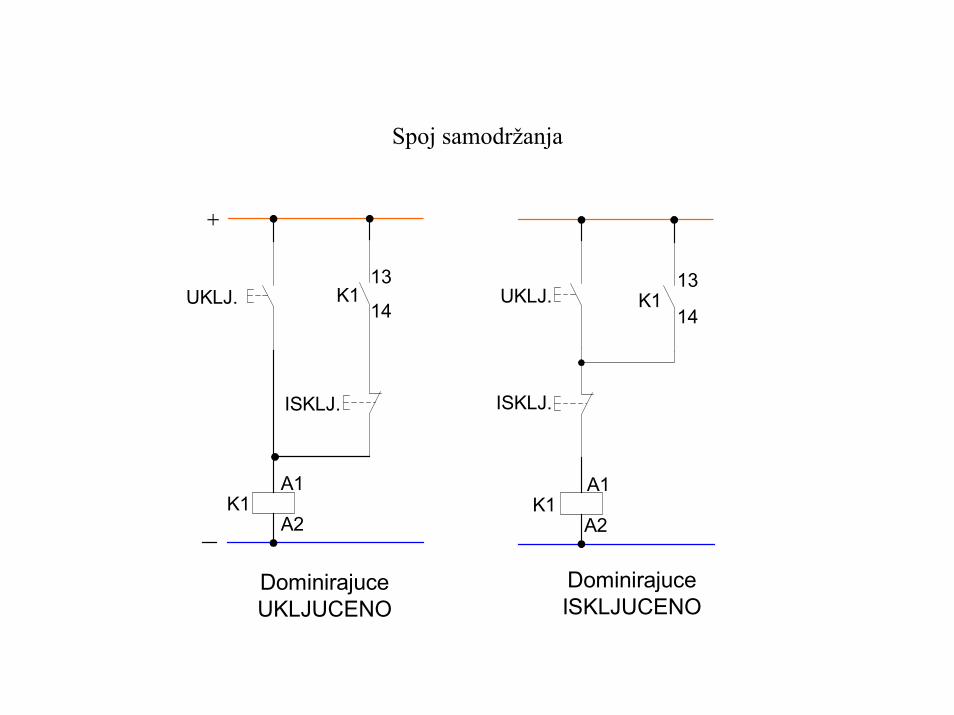
Spoj samodržanja
UKLJ.
+
K1A1
A2
K114
13
ISKLJ. ISKLJ.
UKLJ.
K1A1
A2
K114
13
DominirajuceUKLJUCENO
DominirajuceISKLJUCENO

Primjer upravljanja dvoradnog cilindra sa monostabilnim 5/2 razvodnikom pomoću spoja samodržanja.
Y1K1A2
Y1
1
2
3
A
+
S1
5
4
A1
K114
13
S2
K123
24
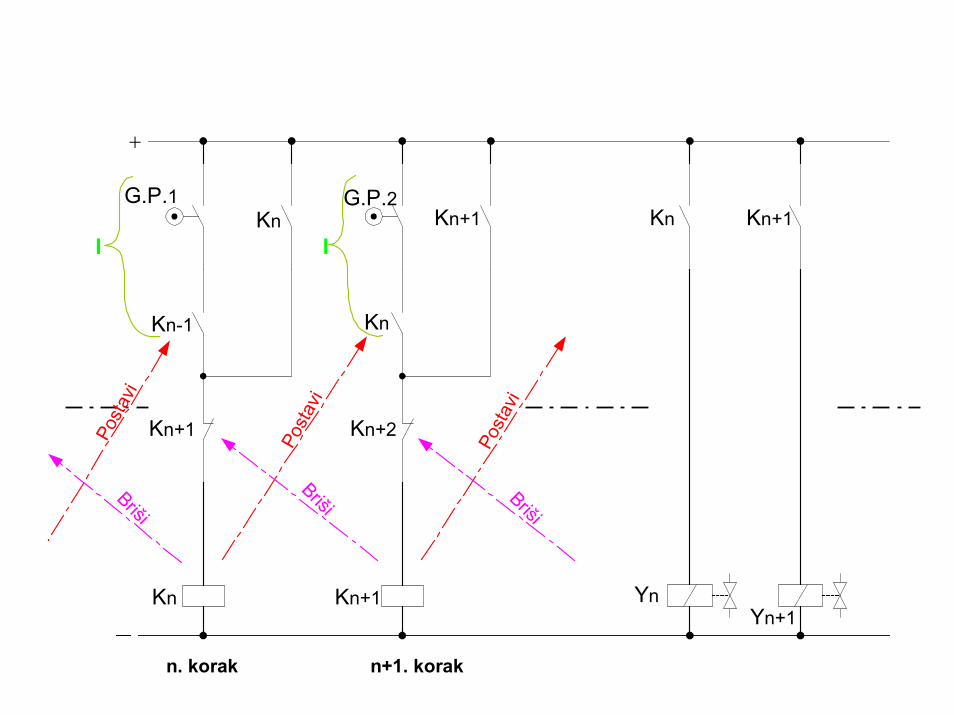
Složeni spojevi
• Metoda korak po korak
Aktualni korak uspostavlja uvjet (set) za slijedeći, a ukida prethodni (reset). Koristi se spoj samodržanja. Dodatni signal dolazi od krajnjeg (graničnog) prekidača, ili nekog drugog elementa, preko serijskog spoja (I logika).
Yn
+
G.P.1
Kn
Kn
Kn+1
Kn-1
KnKn+1
Kn+1
Kn
G.P.2
Kn+2
Yn+1
Kn+1
Post
avi
Post
avi
Post
avi
Briši
Briši
Briši
n. korak n+1. korak
I I





























